1. Füüsikaliste suuruste mõisted, definitsioonid ja ühikud
[vaata | muuda]
Voolu töö ja võimsus. Joule-Lenzi seadus. Potentsiaal ja pinge. Elektriväli, suund ja tugevus. Voolu tugevus ja tihedus. Takistus, selle sõltuvus juhi mõõtmetest.
Eritakistus . Laeng ja
mahtuvus .
Induktiivsus . Vooliuallika elektromotoorjõud, lühisvool ja
sisetakistus .
Voolu töö ja võimsus.Voolu töö on võrdeline voolutugevusega I, pingega U juhi otstel ja
ajaga t. [ J ]
Võimsus on ajaühikus tehtud töö. [ W ]
p =
A
t
Joule-Lenzi seadus. Joule-Lenzi seadus : elektrivoolu toimel juhis eralduv
soojushulk Q on võrdeline voolutugevuse I ruuduga, juhi takistusega R ja voolu kestusega t ning kus voolu töö on võrdeline voolutugevusega, pingega juhi otstel ja ajaga. [ J ]
Q = I2 * R * t =
v2 * t
R
= P * t
Potentsiaal ja pinge. Potentsiaal näitab, kui suur on vaadeldavas punktis ühikulise positiivse laenguga keha potentsiaalne energia. [ J/C =V ]
φ =
A
q
Pinge e. potentsiaalide vahe on võrdeline tööga, mida elektriväli teeb ühiklaengu nihutamisel ühest punktist teise. [ V ]
φ12 =
A12
q
Elektriväli, suund ja tugevus.
Elektriväli on
mateeria eriline vorm, mis esineb laetud kehade ümber ja mõjutab sinna paigutatud laenguid.
E =
F
q
Homogeenses väljas:
E =
φ2 - φ1
d
Voolusuund on positiivsete laengukandjate liikumise suund ( vooluringis plussilt miinusele ).
Tugevus näitab, kui suur jõud mõjub selles väljas ühikulisele positiivse laenguga kehale.
Voolu tugevus ja tihedus. Voolutugevus näitab, kui suur laeng läbib ajaühikus juhi ristlõiget. [ A ]
i =
q
t
Voolu tihedus näitab, kui suur voolutugevus läbib juhtme ristlõike pindalaühikut. [ A /m(2) ]
j =
i
S
Takistus, selle sõltuvus juhi mõõtmetest. - on võrdeline pingega U ja pöördvõrdeline voolutugevusega I. [ oom ]
R =
v
i
- on võrdeline juhi pikkusega ja pöördevõrdeline ristlõikepindalaga.
R =
ρ * l
S
Eritakistus.Eritakistus on füüsikaline suurus, mis iseloomustab juhi võimet voolu läbi lasta ning on võrdne juhi takistusega juhul, kui juhi pikkus ja ristlõikepindala on ühikulised.
Laeng ja mahtuvus. Laeng ?????
Mahtuvus on selline laeng, mis tõstab keha potentsiaali ühiku võrra. [ F ]
C =
q
v
Induktiivsus. Induktiivsus on füüsikaline suurus, mis iseloomustab seost ekstravoolu elektromotoorjõu ja põhivoolu muutuse kiiruse vahel.[ H]
E = -
L * di
dt
Vooliuallika elektromotoorjõud, lühisvool ja sisetakistusElektromotoorjõud on suurus, mis on võrdne positiivse ühiklaengu kohta tuleva kõrvaljõudude tööga ( laengu
nihutamine mööda
ahelat ), arvuliselt võrdne avatud klemmide pingega. [ J/C ]
Lühisvool on vool, kus välisahela takistus läheneb nullile.
Vooluallika sisetakistuseks nim. takistuse dimensiooniga suurust, mis arvuliselt võrdub elektromotoorjõu ja lühisvoolu tugevuse suhtega.
I =
ε
R + r
2. Seos pinge ja voolu vahel lineaarses ja mittelineaarses ahelas.
[vaata | muuda]
Lineaarne ahel. Ohmi seadus. Mittelineaarne ahel.
Diferentsiaalne ja
integraalne takistus.
Lineaarne ahel. Lineaarne ahel on selline
vooluahel , kus vool on võrdeline rakendatud pingega.
i = g * v
kus g on
juhtivus . Lineaarse ahela takistus ei tohi muutuda ( R =
const )
Ohmi seadus. Vool
juhtmes on võrdeline pingega juhtme otstel. Võrdeteguriks on juhtivus:
I = g * v
Sellele järeldusele tuli saksa füüsik Georg Simon Ohm (1787-1854) oma katsete tulemusena, kui ta
1826 . aastal uuris elektrijuhtivust. Seda seaduspärasust nimetatakse tänapäeval Ohmi (loe:
oomi ) seaduseks ja sõnastatakse enamasti nii:
Voolutugevus ahela osas on võrdeline sellele ahelaosale rakendatud pingega ja pöördvõrdeline ahelaosa takistusega.
I =
v
R
Mittelineaarne ahel.
Mittelineaarne ahel on selline vooluahel, kus juhtivus või takistus on sõltuvususes ahela
pingest või
voolust , st et R != const. Näiteks võib tuua pooljuhtdioodi
juhtivuse , kus pinge kasvades vool hakkab eksponentsiaalselt kasvama.
Lisa:
Elektriahelat, milles on kas või üks mittelineaarne osa (
takisti , element), nimetatakse mittelineaarseks. Kuna mittelineaarelemendi takistus pole
konstantne , siis ei saa niisugust elementi sisaldavat ahelat arvutada Ohmi seaduse järgi. Kui elemendi (või elementide) pinge-voolu
tunnusjoon (ed) on teada, võib kasutada näiteks graafilist meetodit.
Diferentsiaalne ja integraalne takistus. Diferentsiaalne takistus :
Rd =
Δ v
Δ i
Integraalne takistus korral voolutugevus on võrdeline ahela osa pingega ja pöördvõrdeline ahela osa takistusega.
R =
v
i
3. Takistite ja kondekate järjestikku ja rööpne ühendamine.
[vaata | muuda]
Kogutakistuse leidmine takistite rööpsel ja järjestikku ühendamisel.
Pinged ja
voolud takistitel ja ahelal
tervikuna . Kogumahtuvus kondekate rööpsel ja järjestikusel ühendamisel. Seos laengute, pingete ja mahtuvuse vahel üksikutel kondekatel ja ahelal tervikuna.
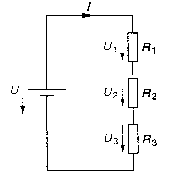
Kui mitu tarvitit või
takistit on ühendatud teineteise järel ilma hargnemiseta, nimetatakse seda järjestik- ehk jadaühenduseks.
Jadaühenduse korral:
- kõikides takistites on ühesuurune vool
I = I1 = I2 = I3
- takistil tekkiv pingelang ehk osapinge on võrdeline takistusega
U1 = I * R1
U2 = I * R2
U3 = I * R3
- osapingete summa võrdub allika klemmipingega
U = U1 + U2 + U3
- ahela kogutakistus võrdub takistite takistuste summaga
R = R1 + R2 + R3
- võimsus võrdub jadamisi ühendatud takistuste võimsuse summaga
P = P1 + P2 + P3 = U1 * I + U 2 * I + U3 * I
- kondensaatorite pöördväärtus on võrdne kondensaatorite pöördväärtuste summaga
1
C
1
C1
1
C2
1
C3
Jadaühenduse puuduseks on asjaolu, et tarvitid on omavahelises sõltuvuses. Kui ühes tarvitis või juhis tekib katkestus, siis jäävad kõik tarvitid pingeta ehk, nagu elektrikud ütlevad, toiteta.
Kui mitu takistit või tarvitit on ühendatud kahe punkti vahele, nimetatakse seda takistite paralleel- ehk rööpühenduseks. Ühenduspunkte nimetatakse sõlmedeks. Nii ühendatakse elektritarviteid enamikul juhtudel kui nende nimipinged on võrdsed.
Rööpühenduse korral:
- kõigil rööbiti ühendatud takistitel on ühesugune pinge
U = U1 = U2 = U3
- vool rööpharus on pöördvõrdeline rööpharu takistusega
I1 =
U
R1
I2 =
U
R2
I3 =
U
R3
- koguvool võrdub haruvoolude summaga
I = I1 + I2 + I3
- kogutakistuse pöördarv võrdub harude takistuste pöördarvude summaga
1
R
1
R1
1
R2
1
R3
- kogujuhtivus võrdub harude juhtivuste summaga
G = G1 + G2 + G3
- koguvõimsus võrdub harude võimsuste summaga
P = P1 + P2 + P3 = I1 * U + I 2 * U + I3 * U = U * I
- Kogumahtuvus on võrdne üksikute kondensaatorite liitmisega
C = C1 + C2 + C3
Rööpühenduse eeliseks on kõigi tarvitite jaoks võrdne pinge ning võimalus tarviteid üksteisest sõltumatult sisse ja välja lülitada. Ette rutates võib öelda, et vahelduvvoolu korral pole alalisvooluga võrreldes selles osas põhimõttelist erinevust.
4. Kahest takistist koosnev pingejagaja.
[vaata | muuda]
Takistitest
koosneva pingejagaja ülekandeteguri
avaldise tuletamine. Takistusliku pingejagaja, ülekandeteguri sõltuvus sagedusest.
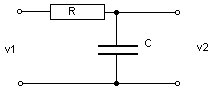
U1 on
sisendpinge U2 on väljundpinge
I =
U1
R1 + R2
U2 =
I * R2 =
U1 *R2
R1 +R2
kui R2 -> 0, siis U2 -> 0
kui R1 = 0, siis U2 = U1
Ülekandetegur K =
U2
U1
R2
R1 + R2
[vaata | muuda]
Seos voolude vahel hargenvas ahelas. Seos pingete ja elektromotoorjõudude vahel järjestikuses ahelas.
Kirchhoffi esimene seadusVooluahelasse ühendatakse tavaliselt palju tarviteid. Üks lihtsam näide on auto või mootorratas, mille rööbiti ühendatud generaatori ja aku klemmidele ühendatakse kõik
elektritarvitid : lambid, klaasipuhasti mootor(id), küttekehad, helisignaal jne.
Vooluahela punkti, kus ühendatakse mitu
juhet , nimetatakse hargnemispunktiks ehk sõlmeks.
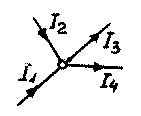
Kirchhoffi esimene seadus on seadus vooludest hargnemispunktis:
Hargnemispunkti suubuvate voolude summa on võrdne sealt väljuvate voolude summaga.
Joonisel toodud sõlme kohta võib siis kirjutada
I1 + I2 = I3 + I4
ehk, kui viia kõik voolud võrrandi ühele poole:
Σ I = 0
Voolude algebraline summa sõlmes on võrdne nulliga.
Sel joonisel loetakse sõlme
suunduvad voolud positiivseteks, sõlmest väljuvad voolud negatiivseteks. Kirchhoffi esimest seadust võib võtta aksioomina, mis ei vaja tõestust, sest elektrihulk, mis ajahetkel hargnemispunkti kokku voolab, peab sealt samal ajahetkel ka ära voolama. Vastasel korral tekiks laengute kuhjumine või puudujääk, mis pole võimalik.
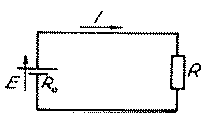
Kirchhoffi teine seadusVooluringis toimivate elektromotoorjõudude summa on võrdne kõigi selle kontuuri takistustel esinevate pingelangude algebralise summaga.
Σ E = Σ I * R
Seda võib vaadelda kui laiendatud Ohmi seadust.
Ühe toiteallika puhul
I =
E
Ro + R
millest
E = I * Ro + I * R
ehk
E = Σ I * R
mida eelmine valem väidabki.
[vaata | muuda]
Siinussignaali
avaldis ja parameetrid:
amplituud , sagedus,
ringsagedus , periood,
algfaas . Definitsioonid ja ühikud. Siinussignaali graafik.
Amplituudspekter . Perioodilise signaali esitamine harmoonikute summana,
Fourier ' seeriad.
Nelinurkse ja kolmnurkse perioodilise signaali Fourier' spekter.
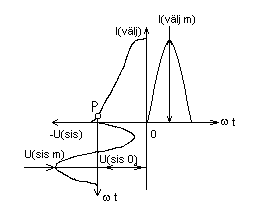
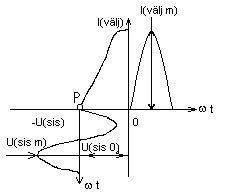
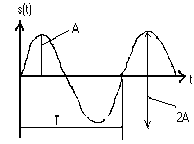
- Siinussignaali hetkväärtuse sõltuvus amplituudist, sagedusest, ajast ja algfaasist —
s ( t ) = A sin ( 2πf t + φ ), kus
A on amplituud - max kõrvalekalle tasakaaluasendist;
f on sagedus - ajaühikus sooritatud võngete arv [ Hz ];
( 2πf t + φ ) nimetatakse faasiks;
φ on algfaas - faasi väärtus ajahetkel t = 0 [ rad ];
2A on tipust tippu väärtus;
t on aeg [ s ];
- Ringsagedus — valem : ω = 2π/T, ajavahemikus 2π sekundit sooritatud võngete arv.
Amplituudspekter —
kui s1( t ) = 1V * sin ( 2π *100 Hz +…)
s2 ( t ) = 0,3V * sin ( 2π *350 Hz +…)
7. RCL ahelate kirjeldamine.
[vaata | muuda]
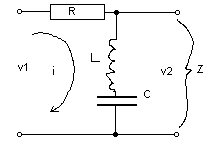
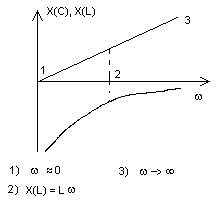
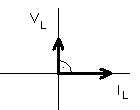
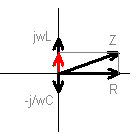
Kondeka mahtuvuslik takistus, sõltuvus sagedusest, faasinihe voolu ja pinge vahel. Pooli induktiivtakistus, sõltuvus sagedusest, faasinihe voolu ja pinge vahel. Mahtuvusliku ja induktiivse takistuse kompleksavaldised, nende esitamine vektordiagrammil. RCL ahela näivtakistuse ja pingete faasinihete leidmine vektordiagrammil.
Kondeka mahtuvuslik takistus sõltub pöördvõrdeliselt sagedusest:
XC =
1
2πfC
1
ωC
Kondekas hilistab pinget 90° ehk π/2 võrra voolu suhtes.
Pooli induktiivtakistus on võrdeline sagedusega:
XL = 2πfL = 2ωL
Pool hilistab voolu 90° võrra ehk pinge on pii/2 võrra voolust ees.
Mahtuvusliku takistuse kompleksavaldis:
R - reaalosa
j - sqrt (-1)
XC' =
1
jωC
= -
j
ωC
Induktiivse takistuse kompleksavaldis:
XL' = jωL
Näiv takistus:
Z = R + j(ωL -
1
ωC
[vaata | muuda]
Kondekast ja takistist koosnev madalpääsfilter. Skeem, ülekandeteguri tuletuskäik, sagedustunnusjoone graafik. Kondekst ja takistist koosnev kõrgpääsfilter, skeem, ülekandeteguri tuletuskäik, sagedustunnusjooned. Sagedustunnusjoone esitus logaritmilises skaalas, detsibell.
Selline filter kannab üle madalad sagedused ja kõrvaldab kõrged sagedused. Kõrgetel sagedustel lühistatakse kondensaator . Kondensaatori takistus on seda suurem, mida madalama sagedusega on vool. Kui on tegemist alalisvooluga, siis vool läbi takisti ja RK ( kondensaatori takistus) on suur. Kui aga kõrgsagedusvool, siis enamik voolu läbi kondensaatori ja RK on suur, et vool suudaks kondensaatori plaate korralikult laadida.
X(täpp)C =
1
jωC
= -
j
ωC
(täpp) tähistab tuletist aja järgi.
Ohmi seadus: v(täpp)s = vK + vC , kus vK = I*R ja vC = -j/ωC
Järelikult ülekandetegur võrdub komplekskujul:
K(täpp)(ω) =
v(täpp)v
v(täpp)s
- j
ωC
(R -
j
ωC
ehk
K(ω) =
1
ωC
ruutjuur [R2 +
1
ωC
)2
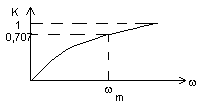
ω muudab pinget kondensaatoril => muutub faas ja K, seetõttu peab ω = const .
Kui ω = 0, siis K = 1 ja kui ωk = 1, siis K = 0,707
Ahel toimib integreerivana sagedustel ω ≥ ω k, kus K(& omega ) ˜ 1/ω ja φ = - π/2. Sagedustunnusjoone moodustab seejuures -20 dB/dek.
Järjestikku on lülitatud kondensaator ja takisti. Võrgupinge võetakse takistilt. Vool i on sisendpinge v(täpp)1 korral
i =
i1
Z(täpp)
v(täpp)1
[ R + 1/ (jωC)]
Väljundpinge on
v(täpp)2 = i * R =
v(täpp)1 * R
[ R + 1/ (jωC)]
K(täpp)(jω) =
v(täpp)2
v(täpp)1
R
[R + 1/ (jωC)]
jωCR
1 + jωCR
Siit sagedustunnusjoon
K(ω) = |K(täpp)(jω)| =
ωCR
ruutjuur[1 + (ωCR)2]
Signaalile sagedusega ω = 0 tõkestab ahel leviku täielikult, K(0) = 0. Sellist ahelat kasutatakse võimendusastmete eraldamiseks, kus ta väldib alalispinge sattumist eelmisest astmest järgmisse astmesse. Kõrgetel sagedustel ( ω = &inf; ) ahel signaali ei tõkesta, K( &inf; ) = 1.
XL = 0, väljundpinge v2 faas on sisendpingest v1 faasist φ võrra ees. Sellist faasinihet loetakse positiivseks, sest väljundpinge avaldises faasinihe φ liitub sisendpinge algfaasiga.
tg φ =
vC
vR
i * (1/ ωC)
i * R
1
ωRC
Madalatel sagedustel K -> 0 ja φ -> π/2, kõrgetel sagedustel K -> 1 ja φ -> 0 ning piirsagedusel ωm K = 0,707 ja φ = π/4. Madalatel sagedustel kasvab väljundpinge võrdeliselt sagedusega ja väljundsignaali faas on π/4 võrra sisendsignaali faasist ees.
Ülekandetegur detsibellides määratakse seosega K(ω) [dB] = 20 log K(ω).
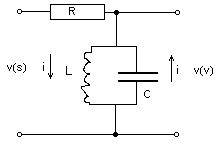
9. Resonantsahelad.
[vaata | muuda]
Pooli, kondeka ja takisti jadaühendus. Kogutakistuse ja voolu sõltuvus sagedusest. Resonantssagedus. Pingete liitumine ahela osadel. Ahela takistus resonantssagedusel. Ahel tõkkefiltrina. Rööpne võnkering. Voolud läbi kondeka ja pooli erinevatel sagedustel. Vool resonantssagedusel. Võnkeringi näivtakistus sõltuvalt sagedusest. Resonantskõver.
Pingeresonants: toimub pingete liitumine nii, et nende pingete summa on null. Kui ω = ω0, siis vool on ühine, ühesugune.
vs = vv + jωLi + i/(jωC), mille jagades i-ga läbi saame, et kogutakistus komlekskujul z(täpp) = R + jωL + [1/ (jωC)] aga normaalkujul Z = ruutjuur {R2 + [ωL - 1/ (ωC)]2}.
Võib tekkida olukord, et ωL - 1/ (ωC) = 0, see on siis, kui ω = ω0 => pooli ja induktiivsuse kogutakistus on võrdne nulliga.
Resonantsi puhul väheneb jadaahela takistus aktiivtakistuseni. Seetõttu on vool võnkeringis maksimaalne ning pinged poolil ja kondensaatoril ületavad Q-kordselt aktiivtakistusel R tekkiva pingelangu.
Q on võnkeringi hüvetegur: Q = 2πf0L/R = 1/(2πf0CR)
Poolil pinge π/2 voolust ees ja kondensaatoril pinge π/2 voolust maas .
Vooluresonants : voolud liituvad nii, et nende summa on null, kui ω = ω, siis pinge on ühine.
1) vL = vC
2) K(täpp)(ω) = Z(täpp)LC/ [ R + Z(täpp)LC]
3) voolud erinevad -> sõltuvad harude takistustest poolis jääb pinge voolust π/2 maha.
Kui ω -> 0, siis XL -> 0, iL -> &inf;, XC -> &inf;, iC -> 0 => madalatel sagedustel, aga kõrgetel sagedustel on olukord vastupidine .
Näivtakistus Z =|Z(täpp)| = ruutjuur{[R2L + (ωL)2] / [(1 - ω2LC) + (ωRLC)2]}
Kui RL = 0, siis Z = ωL / (1-ω2LC)
Võnkering selekteerib signaale seda kitsamas sagedusribas, mida väiksem on RL võrreldes L / C-ga.
Tõkkefilter, millel on tõkkeala sagedusvahemikus f-t ... f+t ning pääsualad 0 ...f-p ja f+p ... &inf; .
[vaata | muuda]
Vabade elektronide ja aukude tege puhtas (legeerimata) pooljuhis. Elektron -aukpaaride kontsentratsiooni sõltuvus temperatuurist. Voolu tiheduse seos laengute kontsentratsiooni ja liikuvusega. Doonor - ja aktseptorlisandite poolt tekitatud laengukandjad. Enamus- ja vähemuslaengukandjad. Laengu kompenstatsioon ja kristalli elektriline neutraalsus.
Vabade elektronide ja aukude tege puhtas (legeerimata) pooljuhis.
Räni ja germaaniumi iga aatomi väliskihis on neli valentselektroni, millest igaüks tiirleb ühtlasi ümber naaberaatomi. Neis ainetes paiknevad aatomid või molekulid üksteise suhtes korrapäraselt, moodustades kristallvõre, mida on siis näha hetkel kahel joonisel. Ühel on ära näidatud, kui tekib vaba elektron, mis tavaliselt tekib siis, kui me lisame aatomi struktuuri mingit teist ainet. Antud juhul siis ränile fosforit . Auk on aga puuduv side aatomite vahel.
Elektron-aukpaaride kontsentratsiooni sõltuvus temperatuurist.
absoluutsest nullist kõrgemal temperatuuril lahkub osa aatomist, muutudes vabadeks elektronideks. Lahkunud elektroni kohta kovalentsidemes nimetatakse auguks. Seega põhjustab elektronide üleminek ühest sidemest teise aukude vastassuunaline liikumine. Puhtas pooljuhis on vabade elektronide arv võrdne aukude arvuga. Niisuguse puhtpooljuhi elektrijuhtivus on madalal temperatuuril lähedane dielektriku omale. Temperatuuri tõustes kasvab vabade e. juhtivus elektronide hulk kiiresti ning vastavalt väheneb pooljuhi eritakistus. Seega elektrivoolu tekkimiseks pooljuhis on vajalik vabade energianivoode olemasolu kas valents - või juhtivustsoonis ning Elektriväli, mis tekitatakse potentsiaalide vahe abil.
Voolu tiheduse seos laengute kontsentratsiooni ja liikuvusega.
DA Lisandid
Enamus/vähemus langukandajad
Elektriline neutraalsus
11. pn-siirde ehitus ja vool.
[vaata | muuda]
Elektronide ja aukude rekombineerumine ja vabadest laengutest tühja ala tekkimine siirde piirkonnas. Sisemise elektrivälja tekkepõhjus ja suund siirdes, selle mõju laengute liikumisele läbi siirde. Vastupinge ja vastuvool. Päripinge ja pärivool. Vastuvoolu sõltuvus temperatuurist. Dioodi voltamperkarakteristiku graafik, voolu ja pinge vahelise seose avaldis. Fotodioodi ehitus ja pingestamine , laengute liikumine dioodi valgustamisel. Valgusdiood , selle pingestamine. Laengute liikumine valgusdioodis ja selle kiirguslik rekombinatsioon . Kiirguse intensiivsuse sõltuvus voolust. Optroni ehitus ja kasutamine.
Räni legeerimisel lisatakse talle kas doonoreid (elektrone rohkem, kui ränil) või aktseptoreid (elektrone vähem, kui ränil). Kuna räni on suuteline moodustama sideme 4 aatomiga, siis doonoraatomiga sideme moodustamisel jääb üks (viies) elektron aatomitega nõrgalt seotuks ning juba soojusenergia mõjul saab juhtivuselektroniks - saime n-pooljuhi. Aktseptoraatomiga sidemete moodustamisel jääb ühes sidemes üks elektron puudu (aktseptoril vaid 3 elektroni väliskihis) ning seda elektroni puudumist nimetatakse auguks. Augud on positiivsete laengukandjate omadustega, sest nad võivad vabalt liikuda ning elektrivälja rakendamisel alustavad suunatud liikumist EV suunas. See on p- pooljuht . Mõlemas pooljuhis saavad seotud (seega liikumisvõimetud) lisandaatomitest ioonid , sest n-pooljuhis lahkus üks elektron oma aatomi juurest (positiivne ioon - katioon ) ja p-pooljuhis aukude liikumise tõttu võib mõne lisandaatomi juures olla elektrone rohkem, kui tema tuumas prootoneid (negatiivne ioon - anioon). Siiski on kristall kokkuvõttes neutraalne , sest liikuvate laengukandjate (elektronid ja augud) arv on täpselt sama suur, kui ioonide arv. Seetõttu öeldakse, et need ioonid on kaetud (igaühe jaoks leidub kirstallis vastandmärgiline liikuv laengukandja ).
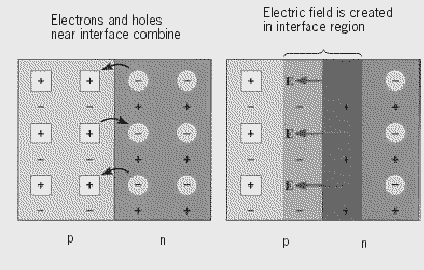
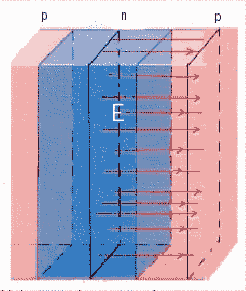
Kui pannakse omavahel kokku kaks erineva juhtivusega pooljuhti, siis nende ühinemiskohas hakkavad elektronid ja augud difusiooni tõttu liikuma vastupidise juhtivusega pooljuhti. Kui elektron ja auk kohtuvad, siis elektron "kukub auku " (kaotab osa oma energiast ning saab üheks sideme elektroniks). Sellise protsessi tulemusena on kokkuvõttes üks juhtivuselektron ja üks auk vähem. Järelikult jäävad ka kummagis kristallis üks ioon katteta ning hakkavad tekitama elektrivälja. Öeldut kirjeldab joonis:
Katteta jäänud ioonide tekitatud elektriväli on suunatud vastupidiselt pooljuhtide tüübile (n-pooljuhilt p-pooljuhile). Mida rohkem elektrone auku kukub, seda tugevamaks läheb elektriväli, kuni lõpuks tekib olukord, kus EV hoiab ära aukude ja elektronide kohtumise (sest kumbki laengukandjatest ei saa liikuda niipidi suunatud EV-st läbi) - tekib tasakaalu olukord.
Kui pn-siiret pingestada nii, et + ühendatakse p-pooljuhile ja - n-pooljuhile,
siis on tegu päripingestamisega ning tekib pärivool. Päripingestamise korral väline EV ületab pn-siirde EV (sest ta on suunalt vastupidine) ning muudab võimalikuks laengukandjate liikumise läbi siirde.
Vastupinge ja vastuvool - Kui pooljuht pingestada vastupidiselt päripingele (+ n-pooljuhile ja - p.-pooljuhile),
on tegu vastupingega ning selle EV on suunalt sama, mis siirde EV, seega need EV-d liituvad ning raskendavad veelgi elektronide liikumist läbi siirde. Veelgi enam - sellise pingestamise tulemusena siirdeala kasvab võrdeliselt vastupingega. Vastuvool on väga väike ja eksisteerib ainult tänu elektron-auk paaridele (e-a paar), mis tekivad soojusenergia tõttu. Toatemperatuuril on selliste e-a paaride teke suhteliselt väike ning ka vastuvool seetõttu nõrk. Ilmne on, et vastuvool on sõltuvuses pooljuhi temperatuuriga.
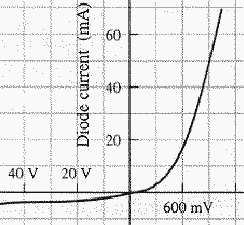
Dioodi voltamperkarakteristik:
Jooniselt on näha, et päripinge korral on sõltuvus lineaarne (alates lävipingest - ca 0.6 V) ning vastupinge võib minna väga suureks, ilma, et vastuvool tõuseks märgatavalt. Graafikult on välja jäänud vastupinge läbilöögi punkt, kus dioodis tekkiv vastuvool hakkab väga kiiresti kasvama. Seda tööpunkti kasutatakse mõningates elektroonika komponentides. (aga siin kontekstis pole oluline)
Fotodiood on diood, mis töötab vastupingestatud reøiimis.
Sellises olukorras on vooluringis kulgev vool üldjuhul väga väike. Kui aga dioodile langeb valgus, mille sagedus on sobiv, siis need footonid neelatakse siirdealas elektronide poolt ning (elektron hüppab juhtivustsooni) tekib e-a paar, mis EV tulemusena tekitab ringluses voolu. Selle voolu suurus on otseses sõltuvuses peale langesva valgusega ning võimaldab seetõttu valgussignaali elektriliseks signaaliks muundada.
Valgusdiood (LED) on põhimõtteliselt sama ehitusega, mis fotodiood (st. valgusele läbipaistva avaga siirdealasse), kuid töötab päripinge-reøiimis. Kui valgusdioodile rakendada pinge, siis hakkavad elektronid ja augud üksteisele vastu liikuma ning siirdealas kohtudes rekombineeruvad (elektron kukub auku). Selle tulemusena vabaneb elektroni energia (mis teda juhtivustsoonis hoidis). Rekombineerunud augud ja elektronid asendatakse uutega välisest vooluringist. Valgusdiood erineb tavalisest dioodist selle tõttu, et tema kiirgus on valguse diapasoonis. Sellise dioodi valmistamise materjale valides saab valida kiiratava kiirguse lainepikkust. Kiiratud valguse intensiivsus sõltub dioodi läbivast voolust.
Optron on opto-elektroonika lülitus, mille abil on võimailk kaks vooluringi teisest elektriliselt isoleerida , samas signaali edasi andes . Sellisel juhul näiteks ei levi aparatuurile ohtlikud häired skeemist skeemi.
Optron koosneb ühest valgusdioodist, millele rakendatakse sisendsignaal ja ühest fotodioodist, millelt saadakse väljundsignaal
12. Bipolaarse transi ehitus ja tööpõhimõte.
[vaata | muuda]
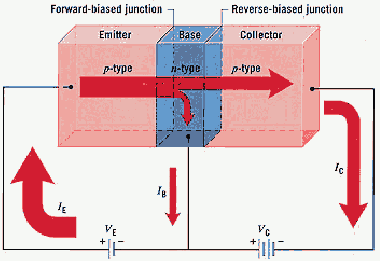
pnp- või npn-transi ehitus, vooluallikate ühendamine ja polaarsused, transi sisend - ja väljundvool ühise emitteriga lülituses. Seos emitteri-, baasi- ja kollektorivoolu vahel. Volude suunad ja laengute liikumine transis. Kollektorivoolu tüürimine baasivooluga, emitterivoolu ülekandetegur ja baasivoolu võimendustegur. Bipolaarse transi sisend- ja väljundtunnusjooned.
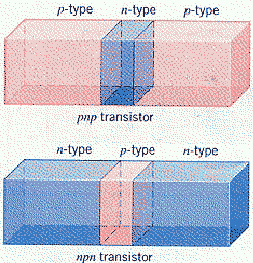
Bipolaarne transistor tähendab seda, et temas on kasutusel kaht liiki laengukandjad (elektronid ja augud). Transistori ehitus:
Bipolaarsete transistoride võimendus tuleneb siirete omavahelisest mõjust, mis ilmneb põhiliselt kuna baas on väga kitsas .
Bipolaarsete transistoride pingestamisel pingestatakse mõlemad siirded eraldi. (Edaspidi räägime pnp transistorist. NPN transistoril pingete ja voolude polaarsused täpselt vastupidised.)
Nagu jooniselt näha, pingestatakse emittersiire alati päripidi, mistõttu hakkavad enamuslaengukandjad (siin augud) liikuma emitterist baasi. Kuna baasis osutuvad nad vähemuslaengukandjateks, siis on nende konsentratsioon emittersiirde läheduses palju suurem, kui kollektorsiirde lähenduses, seega difusiooni tõttu hakkavad nad üle baasi laiali liikuma. Vastupingestatud kollektorsiire aga on laienenud baasi ning selle elektrivälja sattunud augud (teatavasti läbivad vähemuslaengukandjad siirde elektrivälja takistamatult) liiguvad edasi kollektorisse.
Seetõttu on endiselt kollektorsiirde läheduses auke vähem, kui emittersiirde läheduses ning difusioon jätkub. Enamik auke liigub edasi kollektorisse ning ainult vähesed rekombineeruvad baasi elektronidega. Rekombineerunud elektronide ja nende, mis liikusid baasist emitterisse, asemele tuleb aga välisahelast juurde uusi elektrone. Nende elektronide liikumine välisahelast baasi moodustabki baasivoolu. Aukude vool baasist kollektorisse moodustab kollektrori voolu. Aukude vool emitterist baasi ja elektronide vool baasist emitterisse moodustab emittervoolu.
Lisa: Skeemidesse ühendatakse npn-transistor enamasti nii, et emitter on negatiivne ja kollektor positiivne baasi suhtes.
Vastavalt pnp ühendatakse enamasti nii, et emitter on positiivse ja kollektor negatiivse potentsiaaliga baasi suhtes.
13. Ühise emitteriga võimendusastme parameetrid ja alalisrezhiimi seadmine.
[vaata | muuda]
Astme parameetrid ja tunnusjooned. Pingevõimendustegur ja sagedustunnusjoon. Faasitunnusjoon. Amplituudtunnusjoon. Mittelineaarmoonutuste tegur. Koormussirge kandmine tunnusjoontele. Ühise emitteriga võimendusastme põhimõtteskeem. Pingejagaja R1-R2 otstarve. Kollektortakisti Rk ja erladuskondekate C1, C2 otstarve. Baasivoolu leidmine transi sisend-tunnusjoonelt. Pingevõimendusteguri K0 sõltuvus skeemielementidest ja transi β-st. Tagasiside tekitamine emittertakisti Re abil.
Pingevõimendustegur
K =
v2
v1
kus v2 on astme vahelduv väljundpinge, v1 on astme vahelduv sisendpinge. Sagedustunnusjoon K(w) iseloomustab pingevõimendustegurit erinevatel sagedustel.
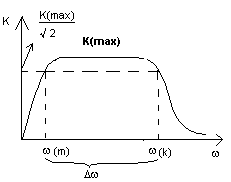
Faasitunnusjoon: Keskmistel sagedustel, kus K = Kmax, pöörab aste signaali PI võrra. Sagedustel wm ja wk tekib sellele lisaks täiendav faasinihe fii vastavalt PI/4 ja -PI/4. Faasinihke fii sõltuvust sagedusest iseloomustab faasitunnusjoon fii(w).
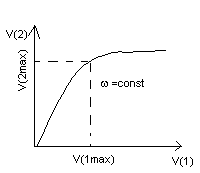
Amplituuditunnusjoon: ainult teatud sisendpinge väärtusteni v1max on seos väljund- ja sisendpinge vahel lineaarne v2 = K * v1 . Alates väljundpinge väätusest v2max = K * v1max hakkab aste signaali piirama. Väljundsignaalis tekivad mittelineaarmoonutused. Seost v 2 = v2(v1) nimetatakse amplituuditunnusjooneks.
Mittelineaarmoonutuste tegur: Harmoonilise signaali piiramisel tekivad väljundsignaalis kordsete sagedustega harmoonikud, millel wn = n * w, kus n = 2, 3, ... . Harmoonikute amlituudide A2, A3, ..., A n kaudu saab mittelineaarmoonutusteguri esitada kujul
M =
sqrt(A22 + A32 + ... + A n2)
A1
kus A1 on signaali w amplituuud.
14. pn- siirdega tüüritav väljatrans ( JFET ).
[vaata | muuda]
Ehitus ja tööpõhimõte. Kanali ahendamine paisupinge abil. Pingestamiseks vajalikud vooluallikad, nende polaarsus . Kanali voolu sõltuvus paisupingest. Tõusu definitsioon ja ühikud. Väljundtunnusjooned. Ühise lättega võimenduastme skeem.
Väljatransistor on transistori tüüp, kus läbivat voolu tüüritakse sisendpingega.
JFET-s (Junction Field Effect Transistor) ehk pn-siirdega väljatransistoris moodustab kanali n- v. p-juhtivusega pooljuhtplaat (joonisel n-juhtivusega), mille otstest lähtuvad elektroodid läte (Source) ja neel (Drain). Pooljuhtplaadi ühel küljel on moodustatud vastupidise juhtivusega ala, mida nimetatakse paisuks. Kanali ja paisu vahel kujuneb laengukandjaist vaene ja seetõttu suure takistusega pn- siire . Siirde laius kasvab teatavasti koos sellele rakendatava vastupingega. Et väljatransistoris on pais legeeritud palju tugevamini kui kanal ja et kanal on väga õhuke (mõni kuni mõnikümmend mikormeetrit), siis p-tüüpi paisule kanali suhtes negatiivse pinge andmisel laieneb siire kanalisse. järelikult kanali voolu läbilaskev ristlõige väheneb. Kui rakendada n-kalali korral neelule positiivne pinge, saabki negatiivse paisupinge muutmisega tüürida kanalit läbivate elektronide arvu, seega neeluvoolu.
Siirde laius kasvab neelus suunas, sest kanalit läbiva voolu tekitatud pingelang tõstab neelupoolses kanaliosas siirde vastupinget.
Neeluvool on suurm, kui paisu ja lätte vahel pinget pole. Mida negatiivsem pinge n-kanaliga transistori paisule anda, seda nõrgemaks jääb neeluvool.
Paisule positiivse pinge andmine pole mingit pidi kasulik, sest siirde laius päripingest märgatavalt ei sõltu ning päripinge korral tekkib arvestatav paisuvool, mis on ebasoovitav.
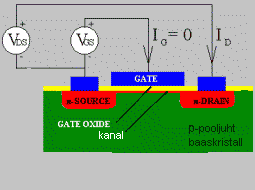
15. Väljatranss ( MOSFET , MOP-trans).
[vaata | muuda]
Kanali voolu tüürimine isoleeritud paisu elektriväljaga. Akanlivoolu sõltuvus paisu pingest vaesustus- (depletion) ja rikastusrezhiimis (enhancement) töötavas transis. Väljatransside skeemisümbolid. Alalisrezhiimi seadmine väljatransiga võimendusastmes, ühise lättega võimendusastmete skeemid.
MOSFET ( Metal Oxice Semiconductor Field Effect Transistor) ehk MOP väljatransistor (Metall Oksiid Pooljuht) on selline, kus paisuks on metallplaat, mis on oksiidikihiga isoleeritud pooljuhist, seega paisuvoolu ei eksisteeri. Sellisesse transi võib pooljuhtkanal olla sisseehitatud või siis indutseeritakse pingestamisel.
Formeeritud n-kanaliga transistor:
p-juhtivusega baaskristalli on tekitatud kaks tugevasti legeeritud n-juhtivusega ala (läte ja neel) ning nende vahele õhuke vähem legeeritud n-juhtivusega kanal.
Vaesustusreøiim (Depletion) paisule on rakendatud lätte suhtes negatiivne pinge ning see tõukab elektrone kanalist välja, vähendades niimoodi neeluvoolu
Rikastusreøiim (Enhancement) paisule on rakendatud positiivne pinge - elektronide konsentratsioon dielektriku läheduses kasvab ning sellega koos kasvab ka neeluvool
16. Opvõimu ehitus ja tööpõhimõte.
[vaata | muuda]
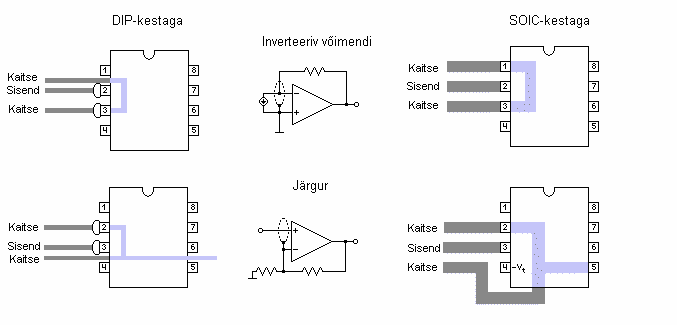
OV ehituse lihtsustatud skeem: sisend-, vahe-, lõppaste. Ideaalse OV parameetrid: sisendvoolud, sisendpinged, pingevõimendustegur, sagedustunnusjoon. Tegasisideta ja tagasisidega reaalse võimendi sagedustunnusjoon. OV sisendsignaalid: ühissignaal ja diferentssignaal, ühissignaali summutamine.
OV on skeem, kuhu on yhele aluskristallile tehtud valmis kõik skeemiosad (takistid, dioodid , transistorid , kondekad). Idee on soojusliku mõju kõikidele elementidele on yhesugune, juhtmete arvu vähendamine (seega ka mahtuvuse ja induktiivsuse v2hendamine). Selle tulemusena kiirus kasvab.
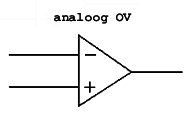
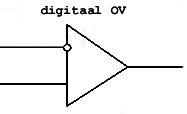
OV toidetakse kahepolaarse pingega. OV sisendiks on kaks eri polaarsusega sisendit (st yhele sisenditest [mitteinverteeriv ehk otsesisend + ] signaali andmisel saame v2ljundiks sama polaarsusega signaali, teise sisendi [inverteeriv sisend - ] korral toimub signaali p88ramine 180 kraadi).
Ideaalse OV parameetrid:
1) sisendvool (i(s) ja sisendpinge (v(s)): peaksid olema nullil2hedased. (sisendahel v6imalikult v2ikese v6imsusega)
2) pingev6imendustegur (k0) : ilma tagasisideta l6pmata suur. (tegelikud v22rtused umb 1000000 ).
3) sagedustunnusjoon: pingev6imendsutegur s6ltub sagetusest, suurtematel sagedustel k0 v2heneb. w(t) -> k0=1, nimetatakse OV piirsageduseks. ideaaljuht oleks kui k0 ei s6ltuks sagedusest.
4) v2ljundahelad peaksid olema v2ikese v2ljundtakistusega r(v)=Va/i(lyhis); Paljude OV v2ljundit ei tohi lyhistada, sest ... (l6petage lause mul konspektis polnud)
5) peab suutma v6imendada ka alalissignaale (k0 != 0 & w0 = 0)
OV v2ljundiks on m6lema sisendi summaarne signaal . Kui +sisend ja -sisend on v6rdsed (ühissignaal), siis k->0, ja yhisignaali ideaaljuhul ei v6imendata. Differentssignaal: V(d) = +sisend - -sisend. V(v2ljund)=k0*V(d) ja k0 -> l6pmatus.
Ühissignaali summutamisest ei j6udnud teha, sest hetkel polnud materiali. Keegi v6iks t2iendada!!!
17. Tagasisidega OV, inverteeriv võimendi.
[vaata | muuda]
Lülituse skeem, sisendvool, tagasisideahela vool, võimendusteguri avaldise tuletuskäik.
Tegemist on negatiivse pingetagasisidega, kuna tagasiside signaal võetakse otse väljundpingelt.
Inverteeriva lülituse puhul on mitteinverteeriv sisend ühendatud nullklemmidega.
Et idealiseeritud võimendis sisendvool puudub, kehtivad sellised seosed:
i1 = (vs - vd)/ R1 = (vd - v v)/ R2 = i2 ja vv = -Kd vd.
Sellest võrrandsüsteemist leiame inverteeriva lülituse ülekandeteguri:
Kinv =
vv
vs
R2
R1
1
1 + 1/β Kd
kus β = R1/(R1 + R2) on tagasisidestusahela ülekandetegur.
Eeldusel , et Kd -> &inf; ja Kinv = - R 2/ R1.
Seega inverteerivas lülituses muudab signaal märki ja ülekandeteguri määrab tagasisidestusahel, mis võib koosneda mitte ainult üksikutest elementidest, vaid ka keerukatest lineaarsetest või mittelineaarsetest lülitustest. Pinge võimendi inverteerival sisendil läheneb nullile, sest
vd =
- lim
Kd -> &inf;
vv
Kd
= 0
Seetõttu võib inverteerivat sisendit vaadelda näiva nullklemmina. Takistust R1 läbiv vool i1 = vs/ R1 ei sõltu takistusest R2, kuigi läbib seda. Inverteeriva lülituse sisendtakistus on Rs = vs/ i1 = R1.
Puudused:
1) tarbib märgatavalt signaaliallika voolu,
2) väljundsignaal vastasfaasis sisendsignaaliga.
18. Summeeriv OV.
[vaata | muuda]
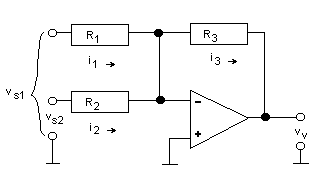
Lülituse skeem. Sisendvoolude sõltuvus sisendpingetest. Voolude liitumine, tagasisideahela vool. Väljundpinge seos sisendpingetega (tuletuskäik).
Sisendvoolude sõltuvus sisendpingest.
vs1 = i1 * R1 + v_
vs2 = i2 * R2 + v_
kus v_ on pinge inverteersisendil maa suhtes.
Siit voolud:
i1 =
vs1
R1
ja
i2 =
vs2
R2
Voolud i1 ja i2 liituvad teineteisest sõltumatult takistite ühenduspunktis ja hargnevad vooluks i3 läbi tagasisidetakisti R3 ning võimendi inverteersisendi vooluks i_:
i1 + i2 = i3 + i_
i_ on võimendi sisendtakistuse tõttu tühine, seega
i1 + i2 = i3
Väljundpinge vv on vastasfaasis pingega takistil R3:
vv = -i3 * R3 = -(i1 + i2) * R3 =
R3
R1
vs1 +
R3
R2
vs2)
= -(K1 * vs1 + K2 * vs2)
Takistite võrdsuse korral on väljundpinge, nii imelik kui see ka pole, sisendpingete vahetu summa. Liitmine toimub suure täpsusega vaid siis, kui
v_ =
vv
K0
19. Integraator.
[vaata | muuda]
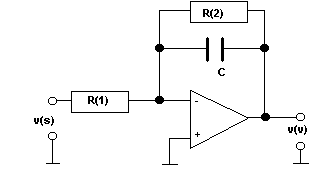
Lülituse skeem. Kondeka laadimisvool ja laengu sõltuvus ajast. Kondeka pinge ja integraatori väljundpinge lõplik ajavahemiku korral. Integreerimiskonstant. Integraatori sagedustunnusjoon.
Teatavasti ideaalne integraator annab väljundis signaali, milline on võrdeline sisendsignaali integraalile aja järgi. Väljundsignaal avaldub sisendsignaalialuse osa pindalaga.
Tänu inverteeriva sisendi virtuaalsele maale on vool takistil R1 määratud suhtega:
Usis
R1
See vool peab läbima mahtuvuse C, mis kindlustabki väljundsignaali.
Reaalses integraatoris peab arvestama integraatori sisendis olevat eelpinget (alaliskomponenti), mis viib ideaalse integraatori väljundpinge pidevale kasvule kuni väljundi küllastumiseni. Alalispinge reziimi stabiilsuse tagamiseks tuleb kondensaator sillata takistiga
Sellega on piiratud madalsagedusliku-, kaasaarvatud ka alalissignaali võimendus, olles nüüd piiratud suhtega:
R2
R1
// All olev jutt on raamatust //
Kui puudub takisti R2, siis tagasiside ahelas olev kondensaator laadub vooluga iC, mis ei sõltu kondensaatori pingest. Siis aja dt jooksul saab kondensaator laengu dq ja tema pinge muutus:
dvC =
dq
C
(iC * dt)
C
Lõpliku ajavahemiku t jaoks
vC =
1
(R1 * C)
t
0
vC dt
Väljundpinge vv = -vC. Aja dimensiooniga
korrutist R1 * C nimetatakse integreerimiskonstandiks.
Vahelduvsignaali jaoks tekitab integraator faasinihke -[PI]/2,
sagedustunnusjoone langus -20 dB/dek.
Alalise
sisendsignaali puudumisel toimub kondensaatori aeglane laadumine inverteersisendi vooluga, ka see põhjustab väljundpinge aeglase triivi. Kui integreeriva signaali spekter ei sisalda
alaliskomponenti, saab inverteersisendi voolu integreerimist vältida
kondensaatori sildamise teel takistiga R2.
20. Mõõtevõimendi.
[vaata | muuda]
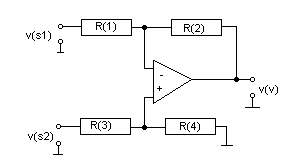
Lülituse skeem. Ühissignaali nõrgendamine, seosed takistite väärtuste leidmiseks nullise väljundsignaali saamiseks ühissignaali jaoks. Diferentssignaali pingevõimendustegur.
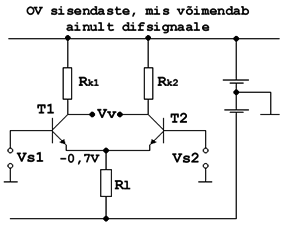
Mõõtevõimendi ( diferentsvõimendi ) on lülitus, kus diferentssignaali kui kasulikku signaali võimendatakse tagasisidega määratud arv korda, samal ajal ühissignaali kui häiresignaali nõrgendatakse võimalikult palju. See leiab aset siis, kui
Kd
Kahendarvu teisendused teistesse koodidesse
Binaarkood
Positiivsete arvude märgibitt on 0, negatiivsetel 1.
H
Binaarkood
Kümnendkood, kui binaararv on
H
Binaarkood
Kümnendkood, kui binaararv on
otsekoodis
täiendkoodis
otsekoodis
täiendkoodis
F
1111
15
-1
7
0111
7
+7
E
1110
14
-2
6
0110
6
+6
D
1101
13
-3
5
0101
5
+5
C
1100
12
-4
4
0100
4
+4
B
1011
11
-5
3
0011
3
+3
A
1010
10
-6
2
0010
2
+2
9
1001
9
-7
1
0001
1
+1
8
1000
8
-8
0
0000
0
0 Tabel 4.4.1: Arvude esitamine protsessoris
D
(1)
D
(1)
D
(2)
D
(2)
+ 6
0110
- 6
1010
0000
0000
arv null
1001
0101
inverteeritud arv
+ 6
-0110
- 6
-1010
lahutada teisendatav arv
+ 1
+ 1
liita 1
- 6
1010
+ 6
0110
tulemus
- 6
1010
+ 6
0110
tulemus
Heksakood
Sõna jagataksenelja biti kaupa rühmadeks alates noorimast ( LSB ) bitist, igale nelikule seatakse vastavusse heksakoodi arv 0, ..., 9, A, B, C, D, E, F.
A16 = 1010 = 10102
....... = ........ = .......
F16 = 1510 = 11112
0101 1111 1100 00112 = 5FC316 e. 5FC3h
Vastupidi teisendamisel seatakse iga heksakoodi sümbolile vastavusse 4 kahendkoodi bitist koosnev arv.
8 F 3 Ah = 1000 1111 0011 10102
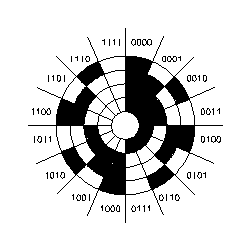
Gray kood
See on positiivsete ( ilma märgita ) arvude kood, kus üleminekul ühelt arvult teisele muutub korraga ainult ühe arvukoha väärtus. Gray koodi eelis tavalise binaarkoodi ees on see, et üleminekul ühe võrra suuremale või väiksemale arvule muutub Gray arvus vaid ühe biti seisund, binaarkoodis võib aga muutuda mitme biti seisund.
- OV töötab integraatorina
- bittide lugem on võrdne tugipinge sisendpinge suhtega
- integraatori väljundis oluliselt ei kajastu kondensaatori laeng ja häire
- lühikese kestvusega impulsshäirete suhtes vähetundlikud
- aeglane, kuid suurt muundamistäpsust tagav
- vead kompenseeritakse -> kahekordne integreerimine
BCD ( binary coded decimal )
Kahendarv jagatkse neljakaupa bittideks alates noorimast järgust ( LSB )
- kui neli bitti rühmas esitavad kümnendarvu väärtusi 0 ... 9, siis teisendust ei vaja
- kui neli bitti rühmas esitavad kümnendarvu väärtusi 10 ...15, siis liidetakse bittidele kahendarv 01102 = 610 ja tehakse ülekanne järgmisse rühma
- negatiivse arvu teisendamisel BCD koodi esitatakse eraldi kümnendkohal märk ("-"), arv ise teisendatakse absoluutväärtuseks ja seejärel BCD koodi
Veel
BCD-kood (Binary Coded Decimal) on kood, kus arvu kodeerimiseks on kasutatud korraga kahend - ja kümnendkoodi. Mitmekohaline arv kodeeritakse kümnendkoodis, kuid selle iga number esitatakse kahendkoodis. Selleks vajatakse sümboleid 0,1,2,3,4,5,6,7,8 ja 9. Kümnendarvu iga järgu esitamiseks vajatakse seega 4 bitti.
Tabel 4.5.1: Kümnend-, heksa -, binaar- ja BCD-kood
D
B
H
BCD
D
B
H
BCD
0
00
0
0000
14
1110
E
00010100
1
01
1
0001
15
1111
F
00010101
2
10
2
0010
16
10000
10
00010110
3
11
3
0011
17
10001
11
00010111
4
100
4
0100
18
10010
12
00011000
5
101
5
0101
19
10011
13
00011001
6
110
6
0110
20
10100
14
00100000
7
111
7
0111
126
1111110
7E
000100100110
8
1000
8
1000
127
1111111
7F
000100100111
9
1001
9
1001
128
10000000
80
000100101000
10
1010
A
00010000
510
111111110
1FE
010100010000
11
1011
B
00010001
511
111111111
1FF
010100010001
12
1100
C
00010010
512
1000000000
200
010100010010
13
1101
D
00010011
830
1100111110
33E
100000110000
Et binaarkoodi teisendamine BCD-koodi on üsna komplitseeritud protseduur, kasutab protsessor binaarkoodi, BCD-koodi teisendatakse vajaduse järgi ainult väljundandmed. BCD-kood on sobiv binaarkoodis olevate arvude esitamiseks kümnendkujul. BCD-koodi kasutavad nt. numbertabloode dekoodrid.
NRZ-kood
Non- return to zero encoding is commonly used in slow speed communications interfaces for both synchronous and asynchronous transmission. Using NRZ, a logic 1 bit is sent as a high value and a logic 0 bit is sent as a low value (the line driver chip used to connect the cable may subsequently invert these signals ).
A problem arises when using NRZ to encode a synchronous link which may have long runs of consecutive bits with the same value. The figure below illustrates the problem that would arise if NRZ encoding were used with a DPLL recovered clock signal . In Ethernet for example, there is no control over the number of 1's or 0's which may sent consecutively. There could potentially be thousands of 1's or 0's in sequence. If the encoded data contains long 'runs' of logic 1's or 0's, this does not result in any bit transitions. The lack of transitions prevents the receiver DPLL from reliably regenerating the clock making it impossible to detect the boundaries of the received bits at the receiver. This is the reason why Manchester coding is used in Ethernet LANs.
A binary encoding and transmission scheme in which ones and zeros are represented by opposite and alternating high and low voltages, and in which there is no return to a reference (zero) voltage between encoded bits.
I2C-kood
Siin on välja eraldatud Manchesteri kood. Eesmärk on ka lahti saada taktsignaalist. Andmesiini testitakse taktsignaali kõrgetel nivoodel. Kui üks pool muudab taktsignaali, siis teine pool testib ja seab oma taktsignaali paika. Kui taktsignaal on madal, siis ülekannet ei toimu. Ülekandesignaalina võib kasutada ka voolu muutust. Seda tehakse keerupaariga. Keerupaariga lülitus ei vaja maasiini, häirete suhtes vähetundlik kui koaksiaalkaabel .
Frondid määravad ära bittide vahelise seisundi NRZI -kood
A binary encoding and transmission scheme that inverts the signal on a one and leaves the signal unchanged for a zero. A change in voltage state signals a one bit, and the absence of a change signals a zero bit.
Manchesteri kood
Esmalt kodeeritakse signaal kahendkoodi ja seejärel formeeritakse biti seisund ümber impulssideks, mis järgnevad üksteisele perioodiga T. Biti seisund seatakse järgnevalt:
The device driver software receives a frame of IP, IPX, NetBIOS, or other higher -layer protocol data. From this data, the device driver constructs a frame, with appropriate Ethernet header information and a frame check sequence at the end. The circuitry on the adapter card then takes the frame and converts it into an electrical signal. The voltage transitions in the transmitted bit stream are in accordance to the format called Manchester Signal Encoding. Manchester encoding describes how a binary ONE and ZERO are to be represented electrically. Manchester encoding is used in all 10 Megabit per second Ethernets; for example, 10BASE2 Thin Ethernet, 10BASE5 Thick Ethernet, and 10BASE -T Twisted- Pair Ethernet. You may want to read the additional perspective on Manchester encoding. In the 100 Mbps Ethernet section of the Compendium there is a section describing the different Fast Ethernet encoding schemes.
Here, we see an example of the signal transitions used to encode the hexadecimal value "0E", which converts to "00001110" in binary. Notice that there is a consistent transition in the middle of each bit-time. Sometimes this transition is from low-to-high and sometimes it's from high-to-low. This is the clock transition. The receiving adapter circuitry 'locks on' to this constant signal transition and, thereby, identifies the timing to determine the beginning and end of each bit. To represent a binary ONE, the first half of the bit-time is a low voltage; the second half of a bit is always the opposite of the first half, that's how the clock transition is created. To represent a binary ZERO, the first half of the bit-time is a high voltage. You see that sometimes there an additional transition at the beginning of a bit-time (not drawn in the diagram above) where the signal is pulled either up or down in preparation for the next bit.
Consider what happens if an external electromagnetic field interferes with the Manchester bit encoding. This external field could be the result of an electric motor , radio transmission, or other source of interference. You should be able to see that if the Manchester signal is disrupted the bits will be destroyed - because the clock signal will be disrupted. It would not be reasonably possible for electrical interference to change a binary ONE into a binary ZERO. Since each bit is symmetrical (second half is always opposite the first half) the result of electrical noise would be the destruction of the bit; not a change in bit value.
PPM
Signaali impulsi hilistumisaeg on otseselt seotud sisendsignaali amplituudiga. Kvandi numbrile vastab impulsi hilistumisaeg.
PWM
Signaali impulsi pikkus on otseselt seotud sisendsignaali amplituudiga. Kvandi numbrile vastab impulsi kestus.
23. Loogikalülitused ja nende kasutamine.
[vaata | muuda]
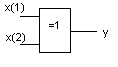
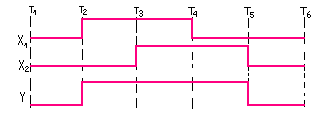
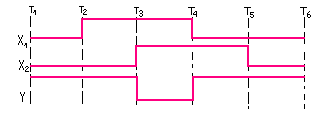
Inverter , NING, NING-EI, VÕI, VÕI-EI, Välistav VÕI. Lülituste skeemisümbolid, seisunditabelid, sisend- ja väljundsignaalide ajadiagrammid. Lülituste kasutamisnäited: poolsummaator ja summaator, dekooder , multiplekser, Viterbi modulaator. Nende skeemid, signaalid ja tööpõhimõte.
Funktsiooni nimetus
Olekutabel
Loogikaelemendi tingmärk
Signaal
IEC*
USA
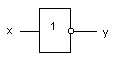
EI
x
y
0
1
1
0
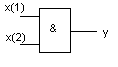
NING
x1
x2
y
0
0
0
0
1
0
1
0
0
1
1
1
VÕI
x1
x2
y
0
0
0
0
1
1
1
0
1
1
1
1
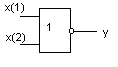
NING - EI
x1
x2
y
0
0
1
0
1
0
1
0
0
1
1
0
VÕI - EI
x1
x2
y
0
0
1
0
1
0
1
0
0
1
1
0
VÄLISTAV VÕI
x1
x2
y
0
0
0
0
1
1
1
0
1
1
1
0
[vaata | muuda]
Asünkroonne ja sünkroonne RS- triger , skeemid NOR ja NAND -lülitustel, seisunditabelid, sisend- ja väljundsignaalide ajadiagrammid. D-triger: skeem, signaalide ajadiagramm, kasutamine lukkregistrina: rööpse lukkregistri skeem ja signaalide ajadiagramm. JK-triger: skeem, seisunditabel. Kahetaktiline triger, juht- ja abitrigeri otstarve, frondilt ümberlülituva kahetaktilise D- trigeri signaalide ajadiagramm. JK-triger T-trigerina (loendustrigerina, selle juhttrigeri ja abitrigeri signaalide seisundid ja ajadiagramm.
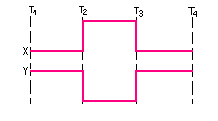
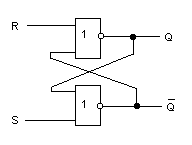
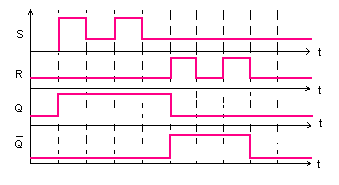
Asünkroonne RS-trigeril on kaks sisendit, S ja R ning kaks väljundit Q ja Q. Kui Q- väljundis on 1-signaal, siis Q- väljundis on 0-signaal.
Tüüp
Olekutabel
Tingmärgid
Skeeminäited
Aegdiagramm
Asünkroonne RS-triger
S
R
Q0
Q1
0
0
1
1
0
0
0
0
0
1
1
0
0
1
0
0
1
0
1
1
1
0
0
1
1
1
1
x
1
1
0
x
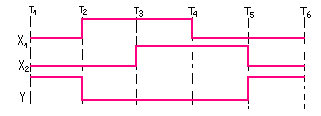
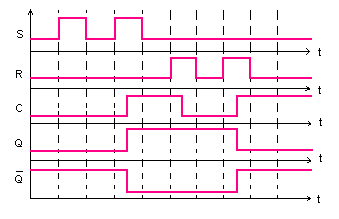
Sünkroonne RS-triger
S
R
Qn
Qn+1
0
0
1
1
0
0
0
0
0
1
1
0
0
1
0
0
1
0
1
1
1
0
0
1
1
1
1
x
1
1
0
x
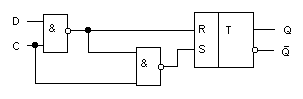
D-triger e. nihketrigeri võib saada sünkroonsest RS- trigerist , kui selle ühte sisendisse anda D-signaal ja teise sisendisse sama signaal NING-EI-lüli abil inverteeritult. D-trigerit kasutatakse ainult sünkroonsena. Seepärast on tal taktimpulsside sisend C ja juhtimiseks NING-EI-element. D-trigeri väljundsignaal on taktil n+1 sama, mis oli trigeri sisendis eelmisel taktil: Qn+1 = Dn . Seega viitab D-triger tema sisendisse saabuvat informatsiooni ühe sünkroniseerimistakti võrra.
Tüüp
Olekutabel
Tingmärk
Skeeminäide
D-triger
Dn
Qn
Qn+1
0
0
0
0
1
0
1
0
1
1
1
1
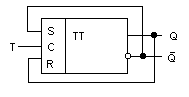
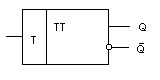
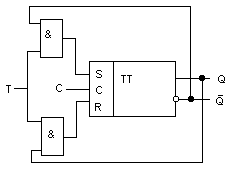
T-trigeril on üks nn. loendussisend. Trigeri võib saada JK-trigerist, kui signaal anda C-sisendisse ning kokkuühendatud J- ja K-sisendile rakendada 1-signaalile vastav alalispinge. Niisugune triger lülitub ümber iga kord, kui sisendisse saabub järjekordne impulss ( asünkroonne). JK-trigerist saab sünkroonse T-trigeri, kui anda kokkuühendatud sisendisse sisendimpulsid ja C-sisendisse taktimpulsid. Siis valmistab T-sisendisse saabuv järjekordne impulss trigeri ette ümberlülitumiseks, tegelik ümberlülitumine aga toimub taktimpulsside saabumise hetkel.
Tüüp
Olekutabel
Tingmärk
Skeeminäide
T-triger
See käib sünkroonse kohta
T
Qn
Qn+1
0
0
0
0
1
1
1
0
1
1
1
0
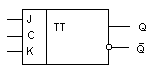
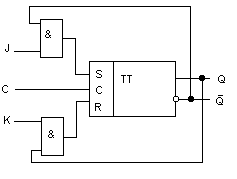
JK-trigeri põhiseisundid on J ja K. Sünkroontrigeril ka C. Sisendsignaalikompositsioonide 00, 10 ja 01 korral toimib see triger analoogselt VÕI- EI-elementidest koosneva RS-trigeriga, kuid olulise iseärasusena ei ole tal keelatud kombinatsioone: J = 1, K = 1 korral muudab JK-triger oma väljundoleku vastupidiseks, st. Qn+1 = Qn.
Tüüp
Olekutabel
Tingmärk
Skeeminäide
JK-triger
J
K
Qn
Qn+1
0
0
1
1
0
0
0
0
0
1
1
0
0
1
0
0
1
0
1
1
1
0
0
1
1
1
1
0
1
1
0
1
25. Pooljuhtmälud.
[vaata | muuda]
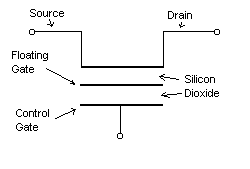
EPROM mäluraku ehitus, ühendamine rea ja veeru liinidega, programmeerimine , kustutamine ja lugemine. EPROM mälumaatriksi skeem, mälupesa valik aadressi abil, mälurakkude info edastamine andmesiinile.
EEPROM : ühe ja mitme ujuva paisuga mäluraku ehitus. Kanali voolu sõltuvus paisude laengust. Mäluraku ühendamine veeru ja rea liiniga , mälu kirjutamine, kustutamine ja lugemine.
SRAM : RS triger rmälurakuna, mälurakkude ühendamine maatriksiks, mälust lugemine, mällu kirjutamine.
DRAM: mälukondeka ühendamine aadressi- ja andmesiiniga, kirjutamine ja lugemine, mälu värskendamise põhjused ja sagedus.
EPROM: Ümberprogrammeeritav püsimälu, milles mäluelementideks on ujuvpaisuga MOP-transistorid. Enne ümberprogrammeerimist on vajalik kustutus ultraviolettkiirguse abil erilises kustutusseadmes ja uue salvestuse teostamiseks vajatakse erilist programmaatorit. Kui ujupaisus on elektronid, siis kanalist elektronid läbi liikuda ei saa. Seega see on vist mäluefekt.
EEPROM: Korduvalt ümberprogrammeeritav püsimälu, mida saab eelnevalt kustutada elektriliselt. Kustutus võib toimuda ka üheaegselt programmeerimisega, kuid igal juhul on see üsna aegaviitev protsess. Puuduseks on suhteliselt kõrge hind.
Puuduseks on see, et EEPROM nõuab programmeerimiseks kahte pinget ( tööpinge ca 5 V ning sellest kõrgem programmeerimispinge ca 12 V ). Kahe ujupaisuga on võimalik saavutada 4 erinevat seisundit. Paisud tyhjad, yks täis teine tyhi ja vastupidi ja mõlemad tühjad. Mällu kirjutamine ja mälust kustutamine käib paisu pinge reguleerimisel ja mälust lugemine käib suudme (Drain vist) kaudu.
SRAM: Muutmälu staatilistel mäluelementidel, mis ei vaja perioodilist värskendamist ( näiteks trigerid MOP-transistoridel ).
DRAM: Muutmälu tüüp, kus andmeid esitatakse väikese mahtuvuse laenguna või selle puudumisena; lihtsuse, odavuse ja suure pakkimistiheduse tõttu PC-de põhiline mäluseade, kuid vajab andmete perioodilist värskendamist.
Enamiku dünaamiliste mälude puhul kasutatakse väliste aadressühenduste arvu vähendamiseks aadressi sisestamist mällu kahes järgus: algul mälumaatriksi rea- aadressid ja seejärel veeruaadressid.
DRAM-i adresseerimine ning infi lugemine/ salvestamine toimub järgmises järjestuses:
a) rea-aadresss ja signaal RAS#
b) viide
c) veeruaadress ja signaal CAS#
d) lugemine või salvestamine
e) värskendamise viide
Korraga värskendatakse kogu mälumaatriksi rida.
26. Mälud magnetkandjatel.
[vaata | muuda]
Magnetmaterjali hüsterees ja mäluefekt. Domeenide korrastatus info salvestamisel magnetlindile või -kettale. Domeenide mõõtmed ja salvestatava info maht. Magnetpea signaalide diskreetimine RZ-koodis.
Magnetoptiline Kerri efekt ja sellega seotud mälu. Domeenide orientatsioon magnetoptilises mälumaterjalis. Curie temperatuur ja materjali oleku muutuste kasutamine info salvestamisel. Magnetoptilise mälu kirjutamise ja lugemise skeem.
Magnetmaterjali hüsterees – teatud magnetmaterjalid koosnevad väikestest mag. osadest, (doomenitest – rühm molekule, mille magnetmomendid on ühesuunalised) mida välise magnetvälja mõju saab muuta doomenite orientatsioon.
Info salvestamisel magnetlindile domeenide orientatsioon muudetakse suunaga piki magnetlinti.
Magnetpartiklide mõõtmed erineva kvaliteediga magnetmaterjalides – mida kvaliteetsem magnet, seda väiksem domeenide mõõde.
RZ digitaalsignaal – Tegemist on kodeerimismeetodiga, mis kasutab magnetlinti, mis on neutraalses konditsioonis. Digitaalne "1" on kodeeritud positiivse impulsina ja "0" negatiivse impulsina.
Kerri efekti seisneb polarisatsioonitüübi muutumises valguse peegeldumisel magnetiseeritud alalt. Lugemiseks suunatakse punktile nõrgem laserkiir, mis peegeldub kettalt tagasi. Peegeldunud kiire polaarsus sõltub loetava punkti magneetumusest ja näitab vastava biti väärtust.
Domeenid on vist suunatud kas mälust välja v6i mälusse sisse. Ei ole kindel.
Kui magnetoptilist materjali kuumutada Curie temperatuurini (200° - 300° C) muutub ta paramagnetilisteks. Seisundis, kus kandja on magnetiline (enne kuumutamist) ei saa selle magnetvälja muuta, paramagnetilises seisus on aga kandja kergesti ümber magneteeritav.
Andmete kirjutamine MO kettale käib kolmes faasis:
Teatud ala kettal kuumutatakse laseriga Curie temperatuurini. Seejärel muudetakse kõikise magneetiliste doomeenide suund selliseks, et see vastab lugemisel suurusele "0". Ühesõnaga kustutatakse kogu informatsioon valitud ala pealt.
Järgmise sammuna käib kuumutab laser jälle üle ketta , kuid seekord kuumutab ainult alasid kuhu tuleb kirjutada väärtus "1". Üle ketta käib ka magnetiseeriv pea, mis muudab nende alade doomeenid teistpidi . Seega on teisel ringil välja valitud alad polarisatsiooniga, mis vastab olekule "1".
Kontrollitakse kirjutatu üle.
Andmete lugemine toimub ainult laserikiire abil, ilma magneti osavõtuta. Selleks kasutatakse Kerri efekti, mis seisneb polarisatsioonitüübi muutumises valguse peegeldumisel magnetiseeritud alalt. Lugemiseks suunatakse punktile nõrgem laserkiir, mis peegeldub kettalt tagasi. Peegeldunud kiire polaarsus sõltub loetava punkti magneetumusest ja näitab vastava biti väärtust.
[vaata | muuda]
Info salvsetamine optilisele kettale: võnkuv vagu, land ja pit. Kettalt peegeldunud signaali nivood landi ja piti korral, signaali diskreetlugemid: 8/14 modulatsioon. Kiirte käik CD ja DVD kirjutamis -lugemispeas.
CD, CD-R ja CD-RW ketta läbilõige, info salvestamine ühekordselt ja mitmekordselt kirjutataval kettal. Mälumaterjali kristallstruktuuri muutuse ja peegeldumisvõime kasutamine CD-RW -s.
Algmaterjal: http://www.ee.washington.edu/conselec/CE/kuhn/cdaudio/95x6.ht m
CD ehitus.
CD-ketas on 120mm läbimõõduga polükarbonaadist ketas. Keskel on 15mm läbimõõduga mulk. Kõige sisemine osa peale andmeid ei salvestata. Andmete hoidmiseks mõeldud ala algab 23mm kaugusel ja lõpeb 58.5 mm kaugusel keskpunktist. The 46-50 mm range is the lead in area and the 116-117 range is the lead out area.
Info kirjutatakse kettale spiraalina seest väljapoole (see vähendab tootmisel tekkivaid vigu ja võimaldab ketta suurust muuta).
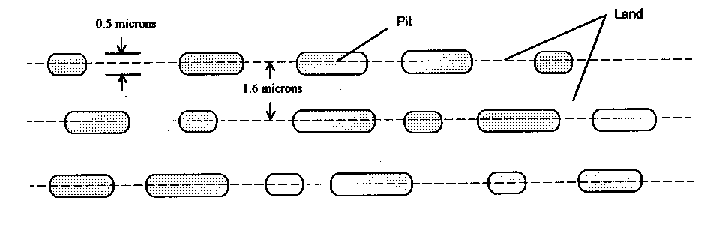
A CD disk contains a long string of pits written helically on the disk. The edges of the pits correspond to binary "1"s.
Iga pit on umbes 0.5 mikron Each pit is approximately 0.5 microns wide and 0.83 microns to 3.56 microns long. ( Remember that the wavelength of green light is approximately 0.5 micron) Each track is separated from the next track by 1.6 microns.
The area between the pits is termed "land". So, a highly magnified section of track might look something like:
Pits are formed in the polycarbonate disk by an injection molding process . As such , they represent some of the smallest mechanically fabricated objects made by humans. The width of a CD pit is approximately the wavelength of green light. The tracks are separated by approximately three times the wavelength of green light. Diffraction from these features (so very close to the wavelength of light) is what gives CD disks their beautiful colors.
A thin layer (50-100 nm) of metal (aluminum, gold or silver) covers the pits. An additional thin layer (10-30 microns) of polymer covers the metal. Finally, a label is silk -screened on the top. Notice that the pits are far closer to the silk screened side of the disk (20 microns) than they are to the read-side of the disk (1.55 mm). Thus, it is easier to permanently damage a disk by scratching the top -- than the bottom !
C. Reading the pits
The CD disk is actually read from the bottom. Thus, from the viewpoint of the laser beam reading the disk, the "pit" in the CD is actually a "bump".
The polycarbonate itself is part of the optical system for reading the pits. The index of refraction of air is 1.0 while the index of refraction of the polycarbonate is 1.55. Laser light incident on the polycarbonate surface will be refracted at a greater angle into the surface. Thus, the original incident spot of around 800 microns (entering the polycarbonate) will be focused down to about 1.7 microns (at the metal surface). This is a major win, as it minimizes the effects of dust and scratches on the surface.
The laser used for the CD player is typically an AlGaAs laser diode with a wavelength in air of 780 nm. ( Near infrared -- your vision cuts out at about 720 nm). The wavelength inside the polycarbonate is a factor of n=1.55 smaller -- or about 500 nm.
The pit/bump is carefully fabricated so that it is a quarter of a wavelength (notice a wavelength INSIDE the polycarbonate) high. The idea here is that light striking the land travels 1/4 + 1/4 = 1/2 of a wavelength further than light striking the top of the pit. The light reflected from the land is then delayed by 1/2 a wavelength -- and so is exactly out of phase with the light reflected from the pit. These two waves will interfere destructively -- so effectively no light has been reflected.
The spacing between pits is equally carefully selected. Recall from basic optics that the image of a beam passing through a round aperture will form a characteristic pattern called an Airy disk. The FWHM (full-width half- maximum ) center of the Airy disk pattern is a spot about 1.7 um wide and falls neatly on top of the pit track. The nulls in the Airy pattern are carefully situated to fall on the neighboring pit tracks. This minimizes crosstalk from neighboring pits[3].
D. The optical train -- three beam pick -up
The most common optical train in modern CD players is the three beam pick-up, depicted below[4].
The light is emitted by the laser diode and enters a diffraction grating. The grating converts the light into a central peak plus side peaks. The main central peak and two side peaks are important in the tracking mechanism.
The three beams go through a polarizing beam splitter. This only transmits polarizations parallel to the page. The emerging light (now polarized parallel to the page) is then collimated.
The collimated light goes through a 1/4 wave plate. This converts it into circularly polarized light.
The circularly polarized light is then focused down onto the disk. If the light strikes "land" it is reflected back into the objective lens. (If the light strikes the pit, now a bump, it is not reflected.)
The light then passes through the 1/4 wave plate again . Since it is going the reverse direction, it will be polarized perpendicular to the original beam (in other words , the light polarization is now vertical with respect to the paper ).
When the vertically polarized light hits the polarizing beam splitter this time, it will be reflected (not transmitted as before). Thus, it will reflect though the focusing lens and then the cylindrical lens and be imaged on the photodetector array. The cylindrical lens is important in the auto-focusing mechanism.
E. Three beam autofocus
If the objective lens is closer to the compact disk than the focal length of the object lens, then the cylindrical lens creates an elliptical image on the photodetector array.
If the objective lens is further away from the compact disk than the focal length of the object lens, then the cylindrical lens again creates an elliptical image on the photodetector array. However , this elliptical image is perpendicular to first image.
Of course, if the disk is right at the focal length of the objective lens, then the cylindrical lens does not affect the image and it is perfectly circular.
So, if the disk is too far away -- then quadrants D and B will get more light than quadrants A and C. Similarly , if the disk is too close -- then quadrants A and C will get more light than D and B. A simple circuit generates an autofocus signal based upon the output of the photodetector[5].
The output of this correction signal can be used to drive a simple auto- focus servo. A typical example of such a servo is illustrated below[6].
F. Three beam tracking
When the laser beam goes through the diffraction grating, it is split up into a central bright beam plus a number of side beams. The central beam and one beam on each side are used by the CD for the tracking system.
Consider a segment of the CD player containing several tracks.
If the optical head is on track, then the primary beam will be centered on a track (with pits and bumps) and the two secondary beams will be centered on land. The three spots are deliberately offset approximately 20 microns with respect to each other.
Two additional detectors are placed alongside the main quadrant detector in order to pick up these subsidiary beams. If the three beams are on track, then the two subsidiary photodetectors have equal amounts of light and will be quite bright because they are only tracking on land. The central beam will be reduced in brightness because it is tracking on both land and pits.
However, if the optical head is off track, then the center spot gets more light (because there are fewer pits off track) and the side detectors will be misbalanced.
28. Analoogsignaali diskreetimine.
[vaata | muuda]
Diskreetimisperiood ja -sagedus. Diskreetsignaali spekter, selle komponentide kattumine. Nyquisti reegel. Diskreetimisaeg ? kui nelinurkne ajaaken, selle Fourier' pööre ja spekter, signaali madalate ja kõrgete sageduskomponentide diskreetimistäpsus sõltuvalt ajaakna spektrist.
29. Analoogsignaali kvantimine.
[vaata | muuda]
Kvantimine ühtlase ja ebaühtlase sammuga. Kvantimismüra, selle efektiivväärtus (RMS). Siganaal -müra suhte sõltuvus kasutatud bittide arvust. Kvantimismüra spekter ja selle hälvete tõenäosusjaotus.
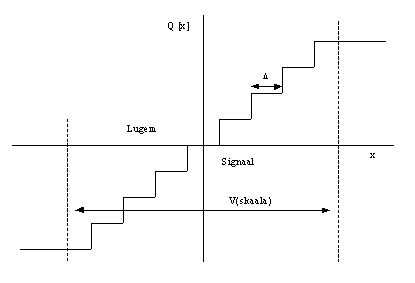
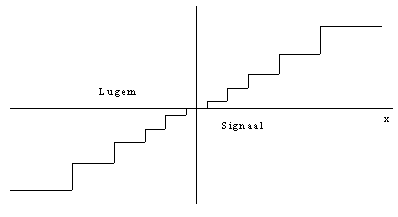
Ühtlase sammuga, siis iga kvantimisvahemik on sama sammuvahega, st. iga samm on eelmisega sarnane.
Ebaühtlase sammuga, siis iga kvantimisvahemiku sammu vahe võib muutuda suure tugevusega ehk siis magnituudis, st. sammud on erinevad.
Kvantimismüra on sama mis lugemi viga ja avaldub kujul
Signaal-müra suhte sõltuvus kvantide ja bittide arvust avaldub sellise suhtena S/N ja mis võrdub S/N (dB) = 1,76 + 6,02*n Kvantimismüra spekter on valge, sagedused 0 ... &inf;.
Väikeste ja suurte hälvete tõenäosus on ühesugune.
30. Hoidelülitused.
[vaata | muuda]
Seos analoogsignaali muutmiskiiruse, muundamisaja ja kvantide arvu vahel, hoidelülituse vajalikkus. Hoidelülituse koostisosad, pinge ajaline käik kondekal, lugemi tesimisaeg, hoideaeg ja muundamisaeg.
31. AD muundurid.
[vaata | muuda]
Kaalumismuunduri, rööpmuunduri, sigma -delta ja kahekordse integreerimisega muunduri skeem, tööpõhimõte ja muundamiskiirus. Muundamistäpsus erinevatel muundurite tüüpidel ja häirekindlus.
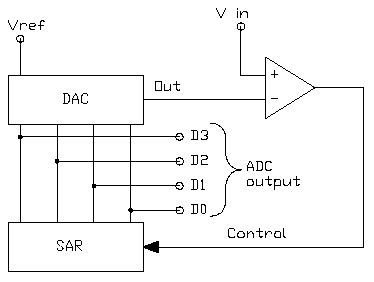
Kaalumismuundur
- signaali võrreldakse üle komparaatori seatud bittide poolt analoogsignaaliga
- algseisus on kõik bitid nullid
- MSB seatakse 0-i - vanim bitt - kannab alati poole tugipingest
- noorima biti järgi on seatud D0
- probleemiks
- bittide seadmine nõuab pikka muundamisaega
- ta on tundlik impulsshäirete suhtes
- kiiremate analoogsignaalide muundamiseks vajab lisaks hoidelülitust
- suurem pinge rikub kaalumise ära
- muundamisaeg on 1 - 50 μs
- lahutus on 8 - 12 bitti
Rööpmuundur
- tugipinge jagatakse üksikuteks osadeks , igale osale vastab 1 kvant e. moodustub kvantide võrra kasvav pinge
- on kõige kiirem muundi
- muundamine toimub ilma bitte järjestikku seadmata
- näiteks videokaardid arvutis
- lahutuvusvõime on 4 - 12 bitti, tavaliselt 8 bitti
- muundamissagedus on 10 - 300 MHz
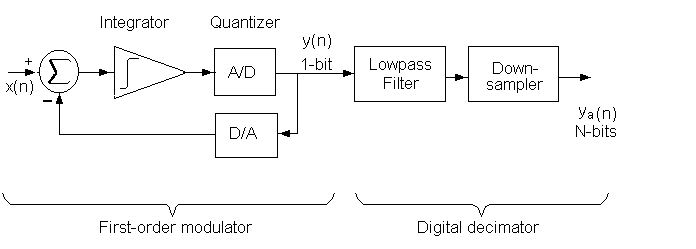
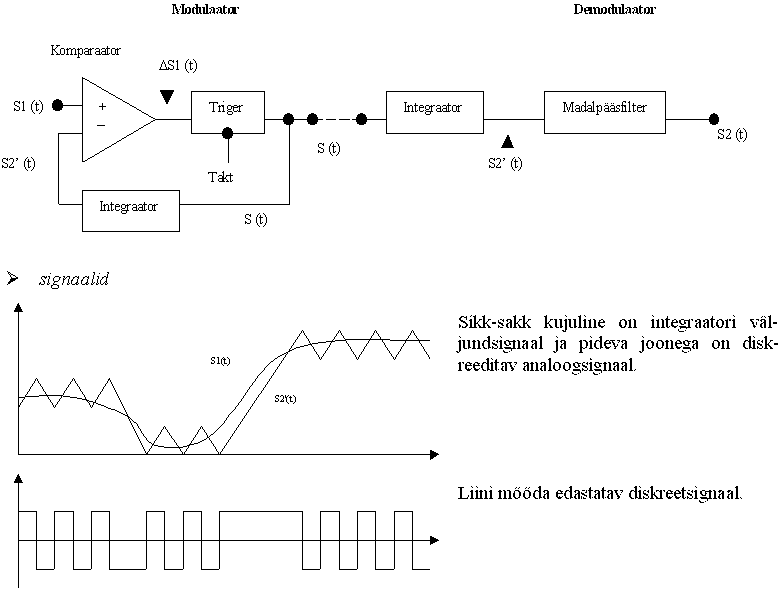
Sigma-deltamuundur
- koosneb nii AD muundurist kui ka DA muundurist
- muundamiskiirus 44 kHz - 1MHz
- ta on hea resolutsiooniga
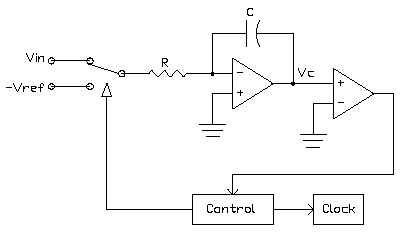
Kahekordse integreerimisega AD-muundur
- OV töötab integraatorina
- bittide lugem on võrdne tugipinge sisendpinge suhtega
- integraatori väljundis oluliselt ei kajastu kondensaatori laeng ja häire
- lühikese kestvusega impulsshäirete suhtes vähetundlikud
- aeglane, kuid suurt muundamistäpsust tagav
- vead kompenseeritakse -> kahekordne integreerimine
32. Digitaalsignaali muundamine analoogsignaaliks.
[vaata | muuda]
DA rööpmuunduri skeem, nõuded takistite täpsuse osas, OV otstarve, valmistamise keerukus. R-2R maatriksi skeem ja voolud, OV kasutamine voolude summeerimisel. Pingete summeerimine R-2R maatriksis, seos väljundpinge, tugipinge ja andmesõna vahel. OV kasutamine pingete summeerimisel.
33. AD muundurite variatsioonid.
[vaata | muuda]
Ühe ja sama sisendiga AD muundurid, multipleksitavad sisendid, unipolaarse ja bipolaarse sisendiga muundurid, diferentsiaalsisendiga muundurite kasutamine koos sildanduriga. Analoogsignaali filtreerimise vajadus, võrguhäire tõkestamine. Tugipinge allikad ja taktsignaali generaatorid . Rööp- ja jadakoodis väljundid.
34. DA muundurite sisendid ja väljundid.
[vaata | muuda]
Rööpse sisendiga ja I2C-sisendiga muundurid. Opvõimu lülitused DA muundurite väljundites. Muundurite muundamisvead, kvantimismüra, mittelineaarmoonutused, väljundi nulli nihe, võimendusvead.








































































































Kõik kommentaarid