Füüsika
I osa eksami kordamisküsimused TEST 1
DEFINITSIOONID 13
VALEMID (SEADUSED) 20
TEST
Loeng 1
naturaalarv
– loendamiseks kasutatavad arvud 0, 1, 2, 3, …
(mõnikord
jäetakse 0 naturaalarvude hulgast välja);täisarv
– kõik naturaalarvud ja nende
negatiivsed vastandarvud ;
ratsionaalarv
– need
reaalarvud , mida saab esitada kahe täisarvu
m ja
n
(n≠0) m/n. Igal ratsionaalarvul on lõpmatu kümnendarendus
ja see on alati perioodiline.
Nt. 11/4=2.7500000...;reaalarv
– kõik
ratsionaal - ja irratsionaalarvud
(mitteperioodilised lõppmatud kümnendmurrud) kokku. Täidavad
lünkadeta kogu arvsirge;
kompleksarv
- arv kujul
a +
ib, kus
a ja
b on
reaalarvud ning
i imaginaarühik
(arv, mille ruut on -1).
Reaalarvu a nimetatakse
kompleksarvu
a + ib reaalosaks ja reaalarvu
b selle
kompleksarvu imaginaarosaks. Iga kompleksarv
z = a + ib on
määratud oma
reaal - ja imaginaarosaga, st.
reaalarvude järjestatud
paariga
(a;b). Sellise paariga on määratud ka tasandi punkt.
Seega on vastavus tasandi punktide või nende kohavektorite ja
kompleksarvude vahel üksühene. Kaht kompleksarvu
z = a + ib ja
x = c + id nimetatakse võrdseteks, kui
a = c ja
b =
d.
- Püsikoma- ja ujukomaarv, nende võrdlemine.
Püsikomaarvud kõik täisarvudest erinevad reaalarvud,
nt.
65346,324.
Ujukoma arv on kümne
astmete kujul esitatud
reaalarv,
nt. 6,5346324 ∙ 104. Ujukoma
arve kasutatakse hästi suurte või hästi väikeste suursuste
iseloomustamiseks, kui ümardamisel on otstarbekas kas arvu alguse
nullide või arvu lõpu kirjutamata jätmine. Omavahel on püsikoma-
ja ujukoma arv seotud järgnevalt:
6,5346324 ∙
104=6∙104+5∙103+3∙102+4∙101+6∙100+3∙10-1+2∙10-2+4∙10-3=65346,324Loeng 2
- Suurused: pikkus, aeg, kiirus, kiirendus. Nende ühikud.
pikkus
– füüsikaline suurus, mis kirjeldab keha lineaarseid mõõtmeid.
Tähis:
l. Ühik:
1 m (meeter).
Meeter on
vahemaa , mille valgus läbib
vaakumis 1/299 792 458
sekundiga .
aeg
– aegruumi osan, aegruumi 4. mõõde, millel on mitmeid
ruumimõõtmetega ühiseid omadusi. Absoluutset aega ei ole olemas,
aeg on
relatiivne suurus, mis sõltub vaatleja liikumiskiirusest ja
teda ümbritsevast gravitatsiooniväljast. Tavamõistes on aeg
pidevalt kulgev
(voolav), ning iga ajavahemiku saab jagada
väiksemateks
osadeks . Aeg on tavaarusaamade järgi pöördumatu,
ajas saab
liikuda vaid minevikust
oleviku kaudu tulevikku. Aeg on üks
vähestest fundamentaalsetest suurustest: seda ei saa defineerida
teiste suuruste kaudu. Nagu ruumi ja massi, nii
defineeritakse ka
aega mõõtmise kaudu. Ajaühik
1 s (sekund)
defineeritakse praegu ajavahemikuna, mis on võrdne tseesiumi
isotoobi 133Cs põhiseisundi kahe peenstruktuuri nivoo
vahelise ülemineku 9 192 631 770 perioodiga. Aja tähis:
t
tuleneb inglise keelsest sõnast
„time“.kiirus
– füüsikaline suurus, mis näitab ajaühikus toimuvat muutust kas
keha olekus või
asukohas . Liikumiskiirus näitab, kui palju muutub
liikuva keha asukoht ruumis ajaühiku jooksul. Kiirus liikumiskiiruse
mõttes võib tähendada keskmist kiirust antud
ajavahemikus või hetkkiirust
(iseloomustab erinevalt keskmisest
kiirusest keha liikumist ühel hetkel, mitte ajavahemikus). Mõlemal
juhul võidakse kiiruse all mõelda
vektorit
(kolmemõõtmelises ruumis), mille suunaks liikumissuund ja mille
moodul näitab liikumise intensiivsust,
mittenegatiivset
reaalarvu - kiirusvektori moodulit,
märgiga reaalarvu
- kui keha liigub mööda sirget vm. joont ning sellel
joonel on
kokku lepitud "positiivne suund". Liikumisvõrrandi esimest
tuletist aja järgi nimetatakse kiiruseks
( hetkkiirus ). See
näitab, kui kiiresti liigub keha antud ajahetkel. Kiiruse tähis:
v
(võib olla ka vektor ). Ühikuks on
teepikkus /aeg e. 1
m/s (meetrit/sekundis).kiirendus
- Kiirendus
(tähis a) on
vektoriaalne füüsikaline suurus, mis väljendab kiiruse muutumist ajaühiku
kohta. Kiirenduse mõõtühik SI-süsteemis on 1 meeter sekundi ruudu
kohta
( 1 m/s2).
Kiirendus (
hetkkiirendus ) on kiiruse
tuletis aja järgi ehk nihke
teine tuletis aja järgi. Kiirendus võib olla nii positiivne kui ka
negatiivne. Negatiivset kiirendust nimetatakse kõnekeeles
aeglustumiseks.Kui kiiruse muut on võrdsete ajavahemike puhul
võrdne, on tegemist ühtlase
kiirendusega . Üldjuhul on tegu
mitteühtlase kiirendusega. Kiirendusvektor lahutub kiirenevalt
liikuva keha või masspunkti trajektoori igas punktis trajektoori
puutuja sihiliseks tangentsiaalkiirenduseks ning sellega risti
olevaks normaalkiirenduseks ehk tsentrifugaalkiirenduseks.
pöördliikumine
– Kui keha kõik punktid liiguvad mööda ringjooni, mille
keskpunktid asetsevad ühel ja samal liikumatul sirgel, siis on
tegemist mehaanilise liikumisega, mida nimetatakse pöördliikumiseks
ehk rotatoorseks liikumiseks. Pöördumist saab mõõta, kasutades
pöördenurka, mida mõõdab nurk pöörleva keha mistahes punkti
pöörlemisraadiuse kahe eri ajamomendil määratud asendi vahel. Kui
pöörleb tahke keha, on selle kõigi punktide pöördenurgad samad.
Nii saame keha pööret kirjeldada üheainsa, skalaarse suurusega.
Tähistades pöördenurga
φ, nurkkiiruse
ω
ning nurkkiirenduse
ε, saame kulgliikumisega
analoogilise võrrandi:
φ(t)= φ0+
ω0∙t+ ε∙t2/2pöördenurk
– nurk, mille võrra pöördub ringliikumises oleva keha
trajektoori raadius mingi aja jooksul. Tähis:
φ
(fii). Ühik:
1 rad ( radiaan ). Põhivalem:
φ=s/r
, kus
s on kaare pikkus ja
r on raadius.
1 täispööre on võrdne 2π radiaaniga. Radiaan on ringjoonele
joonistatud kesknurk, millele vastava kaare pikkus on võrdne selle
ringjoone
raadiusega . 1 radiaan võrdub 57°17´. Pöördenurga
positiivseks suunaks loetakse vastupäeva liikumise suunda.
nurkkiirus
– füüsikaline suurus, mis näitab raadiuse pöördenurka
ajaühiku kohta. Tähis:
ω ( omega ). Ühik:
1
rad/s (radiaani sekundis). Põhivalem:
ω=φ/t, kus
φ (fii) on
pöördenurk ja
t on aeg.
ω = 2πf Nurkkiirus
ω on võrdeline sagedusega
f, selle
tõttu kutsutakse perioodilise liikumise nurkkiirust
ω
ka nurksageduseks ehk ringsageduseks.
nurkkiirendus – pöördliikumisvõrrandi teist tuletist aja
järgi (nurkkiiruse esimest tuletist) nimetatakse nurkkiirenduseks.
Kiirendus näitab kiiruse muutumise kiirust antud ajahetkel. Tähis:
ε ( eeta ). SI ühik
1 rad/s2 (radiaani
sekund ruudus ).Kiirusvektor on trajektoorile alati puutujaks ning näitab
liikumissuunda. Kiirendusvektor on pöördliikumisel trajektoori
suhtes nurga all. Kuna kõverjooneline liikumine tähendab
liikumissuuna muutust, kaasneb sellega kiirusvektori muutumine isegi
siis, kui kiiruse väärtus (vektori moodul) ei muutu. Liikumissuuna
muutust põhjustavat kiirenduse
(a)
komponenti nimetatakse normaalkiirenduseks
(aN)
ja ta on alati kiirusvektoriga (seega ka trajektooriga) risti.
Kiirenduse liikumissuunalist (kiirusvektoriga samas sihis olevat)
komponenti nimetatakse tangentsiaalkiirenduseks
(aT)
(ingl.,lad., tangent - puutja).
Loeng 3
jõud
–füüsikaline suurus, mis iseloomustab vastastikmõju tugevust.
Jõudu määratleb tugevus ja suund (mõnikord on oluline ka
rakenduspunkt). Tegemist on seega vektoriaalse suurusega. Jõudu
tähistatakse enamasti sümboliga
.
Jõu mõõtühik SI-süsteemis on
njuuton (N). Njuuton võrdub jõuga,
mis annab kehale massiga 1 kg jõu mõjumise suunas kiirenduse 1
m/s2. Jõu kui füüsikalise suuruse
definitsioonavaldiseks võib pidada Newtoni II seadust, mille
kohaselt keha kiirendus
on
võrdeline temale mõjuva jõuga ja pöördvõrdeline massiga (m).
Võttes võrdeteguri üheks, saame .
Tuleb tähele panna, et ka keha
(inertne) mass
m
vajab defineerimist
(see, mida kaaluga mõõdetakse, on raske
mass) ja Newtoni II seadus
omaette ei ole piisav mõlema
sõltumatuks määratlemiseks. Massi defineerimiseks võib kasutatada
Newtoni III seadust, mille kohaselt mõju ja vastumõju on võrdsed
(ja vastassuunalised). Seega, kui kaks keha
( massidega m1
ja m2) on
interaktsioonis, siis
m1a1
= m2a2,
mis lubab jõust sõltumatult määrata masside suhte
(m1
/ m2).
mass
–füüsikaline suurus, mis väljendab keha kahte omadust: a)
inertne mass väljendab keha
inertsi ehk võimet
säilitada oma liikumise kiirust
(selle muutmiseks on tarvis
rakendada jõudu); b)
raske mass väljendab keha võimet
tõmmata ligi teisi kehi ehk gravitatsioonivõimet. Ekslikult
mõistetakse mõnikord massi all ka kaalu.
(Kaal on vektoriaalne füüsikaline suurus, mis näitab jõudu,
millega kehale mõjub gravitatsioon . Tähis P. SI süsteemi mõõtühik
N.
,
kus P on kaal, m on keha mass ja g on raskuskiirendus).
Massi
tähistatakse kõige sagedamini sümbolitega
m või
M
ning smõõtühikuks on SI-süsteemis
kilogramm (
1 kg on
ühe kuupdetsimeetri (10-3m3)
puhta vee mass temperatuuril 4°C ja rõhul 1.013 MPa.). Keha
(inertse) massi
m, kiirenduse
ja
kehale mõjuva jõu
vahel
on järgmine seos:
.
Gravitatsioonijõud mõjub kehi ühendava sirge sihil ning tõmbab
neid teineteise poole. Selle jõu moodul on
,
kus
m1 ja
m2 on kehade
(rasked) massid ,
r nendevaheline kaugus ja
G gravitatsioonikonstant (
).
Inertse- ja raske massi ekvivalentsus on
klassikalises mehhaanikas
kogemuslik tõsiasi, millel puudub teoreetiline põhjendus.
Oletus nende masside võrdsusest on Einsteini üldrelatiivsusteooria
aluseks.
liikumishulk
(impulss) –
( liikumis )olekut kirjeldav suurus
, mis võrdub keha massi ja kiiruse korrutisega. Kehtib ka
liikumishulga jäävuse seadus, mis ütleb: suletud süsteemi
kuuluvate kehade liikumishulkade geomeetriline summa on nende kehade
igasuguse vastasmõju korral jääv. Suletud süsteem tähendab siin
süsteemi, mis ei ole vastastikuses mõjutuses süsteemiväliste
kehadega . Impulsi
valem on:
,
kus
m on keha mass ja
v on keha kiirus.
Ühik:
kilogramm-meeter sekundi kohta (kg*m/s).
Njuuton (N) on jõu ühikuks. 1 njuuton on jõud, mis annab ühe
kilogrammise massiga kehale kiirenduse üks meeter sekundis sekundi
kohta.
Njuutoni dimensioon (väljend põhiühikute (meeter,
sekund, kilogramm) kaudu) on
ehk
.
Loeng 4
- Suurused: töö, energia. Nende ühik ja selle dimensioon.
töö
–
(tähis A või W) on füüsikaline
suurus, mis iseloomustab ühelt füüsikaliselt objektilt teisele
kanduva energia hulka. Töö mõõtühik
(energia ühik)
SI-süsteemis on džaul
(J) (1 J = 1 kg*m2/s2
= 1 N*m). Klassikalises
mehaanikas avaldatakse tööd tavaliselt
kehale või punktmassile mõjuva jõu ning selle jõu toimel läbitud
teepikkuse kaudu. Kui jõud F on
konstantne , liikumine on
sirgjooneline, läbitud teepikkus on s ning jõu suuna ja liikumise
suuna vaheline nurk on α, siis töö A avaldub korrutisena
F·s·cos(α). Erijuhul, kui jõu ja liikumise suund langevad kokku
avaldub töö A kujul F · s. Teiste sõnadega, töö avaldub
jõuvektori ja nihkevektori skalaarkorrutisena. Kui jõud liikumise
kestel muutub või liikumine ei ole sirgjooneline, siis avaldatakse
jõud integraalina. Kui töö on positiivne, siis teeb jõud tööd.
Kui töö on negatiivne, siis tehakse tööd jõu vastu.
energia
– skalaarne füüsikaline suurus, mis iseloomustab keha või jõu
võimet teha tööd. Energiat tähistatakse üldjuhul suure
ladina tähega
E ja ühik SI-süsteemis on
1
džaul (J).
Kineetiline
energia on energia, mis on tingitud keha
liikumisest teiste kehade suhtes. Seda tähistatakse enamasti
Ek
või
T.
Energia mõõtühik SI-süsteemis on džaul (J).
Klassikalises mehaanikas näidatakse, et kui keha massiga m
liigub kulgevalt kiirusega v, siis tal on
kineetilist energiat
.
See võrdub tööga, mida selline keha on suuteline
seismajäämiseni sooritama (energia ongi töö varu). Sarnase
valemiga saab arvutada ka fikseeritud telje ümber pöörleva keha
kineetilise energia:
,
kus
I on keha
inertsimoment nimetatud telje suhtes ning
ω
on nurkkiirus.
- Konservatiivsed ja mittekonservatiivsed jõud: nende eristamine (äratundmine).
Energiat , mille töö muutub mehhaaniliseks energiaks nimetakatakse
konservatiivseks jõuks ning energiat mitte säilitavat jõudu
(töö muutub tavaliselt soojuseks või elektrienergiaks)
nimetatakse
mittekonserrvatiivseks (
näit. hõõrdejõud,
takistusjõud). Mittekonservatiivse jõu poolt
tehtav „töö“
tähendab kaotsi läinud energiat. Kui
soovime leida töö valemi
abil energiamuutust (või energia jäävuse seaduse abil tööd),
tuleb mittekonservatiivsete jõudude töö vaatlusest välja jätta.
Kõige lihtsam on seda teha
kasuteguri abil: Seadme kasuteguriks
nimetatakse samas ajavahemikus tehtud kasuliku (energiat muutva) töö
ja kogu tehtud töö suhet. Et ajaühikus tehtud töö kannab
nimetust "võimsus", saab kasuteguri avaldada ka võimsuste
suhtena. Kokku saame ilusa valemite komplekti:
Energia jäävuse seadus: Süsteemis, mille sisejõud on
konservatiivsed, on välisjõudude puudumisel mehaaniline koguenergia
jääv
(protsessi vältel muutumatu/konstantne).
Loeng 5
Ülemaailmne
gravitatsiooniseadus on Newtoni poolt formuleeritud
mudel gravitatsioonijõu toime kohta. Selle seaduse kohaselt
kaks
masspunkti tõmbuvad üksteise poole jõuga, mis on võrdeline nende
massidega ning pöördvõrdeline nendevahelise kauguse ruuduga :
,
kus:
G on gravitatsioonikonstant,
m1
on esimese keha mass,
m2 on teise keha mass,
r on kehadevaheline kaugus. Kuigi valem on sõnastatud
masspunktide jaoks, jääb see kehtima ka sfäärilise sümmeetriaga
massijaotust
omavate kehade korral
(näiteks raskuskiirendust
planeedi pinnal võib ligikaudselt arvutada sama valemi järgi).
Gravitatsioonikonstandi eksperimentaalseks väärtuseks on saadud
6,674×10−11 N·m2·kg−2.
Newtoni gravitatsiooniteooria põhilisteks rakendusvaldkondadeks
on
ballistika (mürskude, rakettide , kosmoselaevade
liikumine gravitatsiooniväljas), planeetide jt.
taevakehade
liikumise analüüs jms.
Newton tuletaski oma teooria lähtudes
empiirilistest andmetest planeetide liikumise kohta, mis olid
formuleeritud juba varem
Kepleri seadustena.
Loeng 6
- Jõumoment, inertsimoment, nende ühikud ja dimensioonid.
jõumoment
–jõu võime põhjustada pöörlevat liikumist ümber punkti. Jõu
momendi suurus arvutatakse jõu suuruse ja jõu õla korrutisena. Jõu
õlaks on jõu kandesirge kaugus vaadeldavast punktist. Momendi
mõõtühik on
Nm ( njuutonmeeter ). Momendi põhivalem:
,
kus
on
jõu õlj ja
on
jõud. Jõumoment punkti suhtes on märgiga suurus. Märgi määrab
pöördesuund, mille suhtes tuleb varem kokku leppida.
inertsimoment
– massiga analoogne suurus pöördliikumise puhul fikseeritud telje
ümber. Inertsimoment iseloomustab jäiga keha inertsi
pöörlemiskiiruse muutmise suhtes. Tema roll pöörlemise dünaamika
kirjeldamisel on sama, mis
tavalisel massil
kulgliikumise dünaamika
kirjeldamisel. Punktmasside süsteemi inertsimoment avaldub kujul
,
kus
ri on punktmassi
mi
kaugus pöörlemisteljest. Pideva massijaotusega keha puhul asendub
summa integraaliga
,
kus
ρ on keha tihedus,
dV on ruumalaelement ja
integreerimine toimub üle kogu keha ruumala.
Keha
Inertsimomendi
avaldis Õõnes
silinder või
peenike rõngas (raadius R), sümmeetriatelje suhtes
I=mR2Täis silinder või
ketas , sümmeetriatelje suhtes
Õhuke ketas,
telg ketta tasandis läbi masskeskme
Peenike varras (pikkus
l), telg risti läbi masskeskme
Peenike varras, telg risti läbi otspunkti
Sfäär
Kera
Ristkülikukujuline plaat (küljed
a, b), telg risti läbi masskeskme
Inerts leiab kasutamist tehnikas näit.
hoorattana ja küroskoobis
(horisontaaltasapinna määramilel).Loeng 7
- Rõhk kui skalaarne suurus: ühik ja dimensioon.
Rõhk
on füüsikaline suurus, mis võrdub pinnale risti mõjuva jõu ja
pindala suhtega:
,
kus
p on rõhk,
F on jõud ja
S on pindala. Rõhu
ühik SI-süsteemis on
paskal,
.
Kui välisjõud mõjub tahkele kehale, siis annab keha rõhu edasi
mõjuva jõu suunas. Vedelikud ja gaasid
alluvad Pascali seadusele (
rõhk kandub vedelikus või gaasis edasi
igas suunas ühteviisi).
- Rõhumisjõud: suurus ja suund.
Silindrilises
anumas oleva vedeliku rõhumisjõud anuma põhjale
võrdub
vedelikusamba kaaluga. Siit järeldub, et vedeliku rõhk
anuma põhjale avaldub
p=Fr/S=m∙g/S.
Seega saame
p=ρ∙V∙g/S=ρ∙h∙S∙g∙/S=ρ∙g∙h ehk
sõnades: vedeliku rõhk anuma põhjale võrdub vedeliku tiheduse
ρ,
vaba langemise kiirenduse
g ja vedelikusamba kõrguse
h
korrutisega. Samal sügavusel avaldab vedelik sama suurt rõhku ka
anuma külgseintele ja isegi vertikaalselt üles.
Vedeliku voolamisel muutuva ristlõikega torus on voolamise kiirus
pöördvõrdeline toru ristlõike pindalaga.
Bernoulli võrrand:
Loeng 8
- Gaasi olekuparameetrid: rõhk, ruumala, temperatuur.
Olulisemad gaasi
iseloomustavad suurused on temperatuur, rõhk ja ruumala. Samadel
tingimustel okupeerib võrdne kogus ükskõik millist gaasi võrdse
ruumala. Näiteks normaaltingimustel (temperatuur 0°C
(+273,15
K), rõhk 1 atm
(Atmosfäär on rõhu ühik, suurus on 101 325
paskalit ehk 760 mmHg.)) on ühe mooli gaasi ruumala 22,4 l.
Kolm gaasi olekuparameetrit seob omavahel gaasi olekuvõrrand, mis on
tuntud ka
Boyle - Mariotte 'i seadusena: Konstantsel
temperatuuril on gaasi rõhu ja ruumala korrutis jääv suurus.
pV= const , kui
T=const.
- Ainehulk ja temperatuur: ühikud, dimensioonid.
ainehulk – selline gaasi hulk, mille mass
grammides on
arvuliselt võrdne aine molaarmassiga . Tähis
z, ühikuks
mool (vana nimetusega gramm - molekul ).
,
kus on
aine
molaarmass ja
m on aine kogus grammides.
temperatuur – ained on gaasilises olekus kindlates
temperatuurivahemikes, mistõttu nad ka käituvad ideaalse gaasina
ainult kindlas temperatuurivahemikus. Gaasidega tegeledes on
valemites kasutusel mõõtühikuna kelvini
kraad K, mis on
võrdne 273°C.
Ideaalse gaasi
olekuvõrrand, mis on tuntud
Clapeyroni-
Mendelejevi võrrandi nime all: ,
kus
p on rõhk
(Pa),
V on ruumala
(m3),
T on temperatuur
(°K),
z on aine kogus
moolides (mool),
R on gaasi universaalkonstant
(R=8,314J/mool∙K),
m on aine hulk grammides
(1g=10-3kg),
on
aine molaarmass
(g∙mool). Olekuvõrrand annab seose gaasi
olekuparameetrite
p,V ja
T vahel
tasakaaluolekus .
Isoprotsessideks nimetatakse selliseid gaasi olekuvõrrandeid,
kus üks parameetritest
(temperatuur, rõhk, ruumala) jääb
muutumatuks. Konstantsel temperatuuril toimuvat nimetame
isotermiliseks, konstantses ruumalas toimuvat
isohooriliseks ja konstantsel rõhul toimuvat
isobaariliseks protsessiks . Isoprotsesside
olekuvõrrand:
Boyle-Mariotte'i seadus: Konstantsel temperatuuril on
gaasi rõhu ja ruumala korrutis jääv suurus.
pV=const, kui
T=const.
Loeng 9
Avogadro seadus: Samadel füüsikalistel tingimustel on kõigi
gaaside moolruumalad võrdsed.
Avogadro arv: et kõigi ainete gramm-molekulid
(moolid)
sisaldavad võrdse arvu osakesi
(molekule), siis sõltub
molekulide ruumtihedus üksnes rõhust ja temperatuurist. Asendades
olekuvõrrandis
ainehulga z molekulide arvuga
N=nV=zNA
(suurust NA, mis väljendab molekulide arvu ühes
moolis aines, nim.
Avogadro
arvuks), saame
,
kus
k=R/NA=1,38∙10-23J/K
(
Boltzmanni constant ). Avogadro arvu täpset väärtust ei
ole tänapäeva tehnoloogiaga võimalik kindlaks teha. Alates 2002.
aastast kasutatakse Avogadro ligikaudse väärtusena arvu
6,0221415∙
1023± 0,0000010∙
1023. - Molekuli kiirus ja energia: seos temperatuuriga.
Molekulaarfüüsika kohaselt liiguvad molekulid erinevate kiirustega
ning erinevates suundades. Seetõttu on mõtekas molekulide kiirust
leida ruutkeskmise kiiruse kaudu: .
Rõhu saame
valemist .
Asendades saame
,
millest järeldub, et energia on võrdelises sõltuvuses
temperatuurist.
Ruutkeskmist kiirust saab leida ka valemiga ,
keskmise kiiruse saab valemist ,
molekulide tõenäoline kiirus .
- Molekuli ruutkeskmise kiiruse valem: rakendused.
soojusmahtuvus –
soojushulk dzaulides
(J), mis tõstab
keha
temperatuuri ühe kelvini
(K) võrra.
1 kalor (cal) =
4,1868 J.erisoojus – soojushulk
(J), mis tõstab antud
aine
massiühiku
(kg) temperatuuri 1 K võrra.
moolsoojus = soojushulk
(J), mis tõstab antud
aine ühe
mooli temperatuurir 1 K võrra.
- Vabadusastmete arv ja moolsoojuste leidmine.
Üheaatomilise molekuli liikumisel on kolm vabadusastet
(kiirusvektori kolm komponenti), mitmeaatomilistel lisandub veel
pöörlev liikumine
(nurkkiirusvektoril samuti kolm komponenti) -
seega kokku kuus vabadusastet. Kaheaatomisel
molekulil langeb üks
nurkkiirusvektori
komponent kokku ühe kiirusvektori komponendiga,
mistõttu on sel 5 vabadusastet (kui
n=1, siis
i=3; kui
n=2, siis
i=5; kui ,
siis
i=6).
Isohooriline moolsoojus leitakse valemist: ,
isobaariline .
Loeng 10
- Gaasi töö: seos olekuparameetrite muutumisega.
Isohoorilisel protsessil
(ruumala konstantne) gaas tööd ei
tee. Isobaarilisel protsessil
(rõhk on konstant) .
Isotermilisel protsessil
(temperatuur konstantne) - Soojusmasinad: jõumasin, külmutusmasin, soojuspump .
jõumasin – ka termodünaamiline mootor on masin, mis muudab
soojusenergia mehaaniliseks tööks. Tsükli moodustavad kaks
isobaari - katla rõhul toimuv
paisumine ja kondensori rõhul
(ligikaudu välisrõhk) toimuv "
kokkusurumine ", mis
tegelikult tähendab ruumala vähendamist auru välja juhtimise teel.
Lõigatud nurk vastab pärast sisselaskesiibri sulgumist ja enne
väljalaskeklapi avanemist toimuvale adiabaatilisele paisumisele.
Kasutegur sõltub katla rõhust; algul oli see suhteliselt madal
(alla 2 atm., temperatuur 390K); hiljem tõsteti rõhku kuni 10
atmosfäärini. Sellele vaatamata jääb aurumasina kasutegur 10%
piiridesse .
Termodünaamika I printsiip:
Gaasile antav soojushulk on võrdne siseenergia (keha (gaasi) võime teha tööd sisemiste
( mikro )protsesside arvelt) juurdekasvu ning paisumisel tehtava töö summaga . .
Isoprotsessid: isohooriline protsess
V=const.; A=0;
,
isobaariline protsess
p=const.;
;
,
isotermiline protsess
T=const.;
;
Q=A. Adiabaatiline protsess
Q=0;
;
pVkconst.,
.
külmutusmasin – tuntuimaks sedalaadi seadmeks on külmutuskapp,
kus
sisetemperatuur (T2) viiakse välistemperatuurist (T1)
madalamaks, pumbates soojust (Q2) kapi jahutusradiaatorist
(madalrõhukamber) väljaspool kappi olevasse kõrgrõhukambrisse,
kus teda enne uut
paisumist jahutatakse (Q1).
Selleks tuleb teha tööd (A). Ühe
dzauli suuruse tööga
külmkambrist välja viidavat soojushulka nimetatakse
külmutusteguriks:
soojuspump –seadeldis, mis töötab külmutusmasina põhimõttel,
aga on ette nähtud ruumi soojendamiseks madalama temperatuuriga
(välis)keskkonna arvel, nimetatakse soojuspumbaks. Kordajat, mis
näitab, kui palju soojust on võimalik ühe dzaulise tööga "
tuppa tuua", nimetatakse soojendusteguriks ja tema valem on:
.
Seega saab kahekümnekraadise temperatuuride vahe korral ühe
dzauliga "üle
pumbata " kuni 15 J soojust
(temperatuuri
27° C ehk 300 K juures).
- Termodünaamika II printsiip (kasuteguri valem): rakendused.
Soojusmasina kasutegur on masina poolt tehtava töö ja soojendilt
saadud energia suhe:
Pole võimalik ehitada masinat, mis muudaks kogu temale antava
soojuse mehaaniliseks tööks. Soojus ei voola iseenesest
külmemalt kehalt soojemale, mistõttu
perpetum mobile on
võimatu.
- Mõõtetulemuse kirjapanek ja ümardamisreeglid.
Mõõtetulemus koosneb mõõdetava suuruse tähisest, mõõtarvust,
mõõteveast, mõõtühiku tähisest
(v.a. dimensioonita
suurustel) näit. l=182 ±2 cm. Mõõteviga võib olla
esitatud
absoluutse piirveana ( ),
mis fikseerib vahemiku, kuus mõõtetulemuse tegelik väärtus asub
või
suhtelise veana, mis väljendab vea võimalikku suurust
veaga võrrelduna ( ).
Mõõteviga koosneb riistaveast ja juhuveast (nende summa).
Digitaalsetel mõõteseadmetel võib riistavea kanda
mõõtmistulemusse, kui
juhuviga seda ei ületa. Kui
riistaviga pole
võimalik kindlaks teha, kasutatakse tema asemel
skaala viga,
lugedes riistaveaks minimaalse täpselt loetava näitude erinevuse
(pool skaala väiksemast jaotisest).
Juhuviga tuleb leida kui vähemalt kolmel järjestikusel mõõtmisel
on erinevus suurem riistaveast. Selleks tuleb koostada mõõteseeria
(vähemalt 10 mõõtmist) statistiline analüüs. Mõõdetav suurus
on sel juhul mõõteseeria aritmeetiline keskmine ( ),
ning vead saadakse leides hälbed ja
nende
ruudud ja
arvutada dispersioon ,
leida tabelist mõõtmiste arvule ja soovitavale usaldusnivoole
p%
vastav
Student ’I kordaja
tp,n ning
arvutada juhuvea suurus usaldusnivool valemiga .
Tulemus peab olema ümardatud. Aluseks on mõõteviga
(liites
riista- ja juhuvea) ümardame
suurusjärgu täpsuseni.
St. viga antakse kahe numbrikohaga, kui esimene tüvenumber on 1
või 2 ja ühe numbrikohaga, kui esimene tüvenumber on suurem.
Piiriks olev „kolm“ on
parajasti pool suurusjärku.
Mõõtarv ümardatakse sama kümnendkohani kui viga.
(Kui
viga on 0,25, siis mõõtarv ümardatakse sajandikeni; kui viga on
60, siis ümardatakse mõõtarv kümnelisteni).Kui kirjutame absoluutse piirvea, paneme ta koos mõõtarvuga
sulgudesse ning
sulgude järele mõõtühiku. Kui kasutame tulemuse
loetavuse huvides järguliiget
(nt. 104),
kirjutatakse see väljaspoole
sulge enne mõõõtühikut.
Usaldusnivoo märgitakse indeksina vea juurde.
(Näit.
m=(3,25±0,1295%)∙103
kg).
DEFINITSIOONID
Loeng 1
- Naturaalarv, täisarv, ratsionaalarv.
naturaalarv
– loendamiseks kasutatavad arvud 0, 1, 2, 3, …
(mõnikord
jäetakse 0 naturaalarvude hulgast välja);täisarv
– kõik naturaalarvud ja nende
negatiivsed vastandarvud;
ratsionaalarv
– need reaalarvud, mida saab esitada kahe täisarvu
m ja
n
(n≠0) jagatisena e. murruna
m/n. Igal ratsionaalarvul
on lõpmatu kümnendarendus ja see on alati perioodiline.
Nt.
11/4=2.7500000...; - Kompleksarvude hulk ja tehted kompleksarvudega.
kompleksarvuks
nimetatakse arvu kujul
a+ib, kus
a ja
b on
reaalarvud ning i imaginaarühik
(i2=-1
ehk
).
Kõikide kompleksarvude hulka tähistatakse
C. Reaalarvu
a
nimetatakse kompleksarvu
a+ib reaalosaks ja reaalarvu
b
selle kompleksarvu imaginaarosaks. Iga kompleksarv
z=a+ib on
määratud oma reaal- ja imaginaarosaga, st. reaalarvude järjestatud
paariga
(a;b). Sellise paariga on määratud ka tasandi punkt.
Seega on vastavus tasandi punktide või nende kohavektorite ja
kompleksarvude vahel üksühene. Kaht kompleksarvu
z=a+ib ja
x=c+id nimetatakse võrdseteks, kui
a=c ja
b=d.
Tehted kompleksarvudegaKahe kompleksarvu
a+ib ja
c+id summaks nimetatakse
kompleksarvu
(a+c)+i(b+d).
(Näit.
(2+3i)+(1−5i)=2+1+(3–5)i=3–2i ) Analoogiliselt
liitmisega toimub ka lahutamine. Kahe kompleksarvu a+ib ja c+id
korrutiseks nimetatakse kompleksarvu (ac−bd)+i(ad+bc).
Näit.
(2+3i)·(1-5i)=2·1-3·(-5)+i(2·(-5)+3·1)=2+15+i(-10+3)=17-7iKoos
aritmeetiliste tehetega "+" (
liitmine ) ja "·"
(
korrutamine ) on kompleksarvude hulk C korpus (kompleksarvude
korpus), mis sisaldab reaalarvude
korpust R.
Tuletis
on matemaatilise analüüsi üks põhimõisteid. Funktsiooni tuletis
mingil kohal näitab selle funktsiooni väärtuse muutumise kiirust
funktsiooni argumendi muutumisel — täpsemalt,
funktsiooni
tuletis on funktsiooni väärtuse muudu ja argumendi muudu suhte
piirväärtus argumendi muudu lähenemisel nullile . Ühe
reaalarvulise parameetriga ning reaalarvuliste väärtustega
funktsiooni korral on selle funktsiooni tuletiseks mingil kohal selle
funktsiooni graafiku puutuja tõus sellel kohal.
Füüsikas on nihke tuletiseks aja järgi hetkkiirus, kiiruse
tuletiseks omakorda kiirendus.
Integraal – määramata
integraaliks nimetatakse funktsiooni algfunktsiooni
leidmist ehk tuletise pöördfunktsiooni. Määratud
integraal on
arvuliselt võrdne xy-tasandil funktsiooni
f(x) graafiku,
x-telje ning vertikaalsete sirgetega
x=a ja
x=b
piiratud pindalaga, kui
f(x) reaalarvuline muutuja
x on
pidev ja funktsioon on tõkestatud lõigus [a, b]
Newtoni-Leibnizi valem: Olgu funktsioon
f(x) lõigus
[a, b] integreeruv ja leidugu tal selles lõigus
algfunktsioon F(x).
Siis .
Arve
a ja
b nimetatakse vastavalt integraali alumiseks
ja ülemiseks
rajaks . Lõiku [a; b] nimetatakse integreerimislõiguks.
Näide.
Loeng 2
taustkeha – „keha“, kust kohavektor lähtub.
Kohavektori muutumine väljendab uuritava keha liikumist taustkeha suhtes.
Taustkehas lähtub enamasti koordinaatide võrgustik, selle 0-punkt
on taustkehaks.
kohavektor – on
suunatud lõik taustkehast uuritava kehani. Ta näitab uuritava keha
asukohta taustkeha suhtes
- Ristkoordinaadid (ortonormaalne reeper).
Lihtsaim ja sagedamini kasutatav koordinaatsüsteem on
ristkoordinaadistik: kolm üksteisega risti olevat ühikvektorit,
mille suunale projekteeritakse kirjeldatav kohavektor. Neid nn.
baasivektoreid tähistatakse tähtedega ,
ja
ning
nad koos moodustavad ortonormaalse reeperi
(" orto "
tähendab siin ristseisu e. ortogonaalsust, "normaalne" aga
seda, et vektorite pikkus on normeeritud väärtusega üks
pikkusühik).
- Vektor ja tema esitus koordinaatidega.
Vektor ehk geomeetriline vektor (ladina keeles
vector - vedav,
kandev ) on lõik, millel on suund ehk siht ja pikkus. Vektoreid
tähistatakse järgmiselt: või
,
kus A ja B tähistavad vastavalt vektori algus- ja lõpp-punkti.
Vektori pikkust tähistatakse sümbolitega ja
.
Kaks vektorit loetakse võrdseks, kui nende suund ja pikkus ühtivad.
Vektoreid, mille suunad ühtivad, nimetatakse kollineaarseteks. Seda
asjaolu tähistatakse sümboliga ||.
Ortonormaalne reeper võimaldab iga vektorit kirja panna kui kolme
teljesuunalise vektori summat: ,
asendades raskestimõistetava kujundi arusaadava
tavaarvude kolmikuga
x, y, z.
Ajaühik
1 s (sekund) defineeritakse praegu
ajavahemikuna, mis on võrdne tseesiumi isotoobi 133Cs
põhiseisundi kahe peenstruktuuri nivoo vahelise ülemineku 9 192 631
770 perioodiga.
Meeter on vahemaa, mille valgus läbib vaakumis 1/299 792 458
sekundiga.
kiirus
– füüsikaline suurus, mis näitab ajaühikus toimuvat muutust kas
keha olekus või asukohas. Liikumiskiirus näitab, kui palju muutub
liikuva keha asukoht ruumis ajaühiku jooksul. Kiirus liikumiskiiruse
mõttes võib tähendada keskmist kiirust antud ajavahemikus
või hetkkiirust
(iseloomustab erinevalt keskmisest
kiirusest keha liikumist ühel hetkel, mitte ajavahemikus). Mõlemal
juhul võidakse kiiruse all mõelda
vektorit
(kolmemõõtmelises ruumis), mille suunaks liikumissuund ja mille
moodul näitab liikumise intensiivsust,
mittenegatiivset
reaalarvu - kiirusvektori moodulit,
märgiga reaalarvu
- kui keha liigub mööda sirget vm. joont ning sellel joonel on
kokku lepitud "positiivne suund". Liikumisvõrrandi esimest
tuletist aja järgi nimetatakse kiiruseks
(hetkkiirus). See
näitab, kui kiiresti liigub keha antud ajahetkel. Kiiruse tähis:
v
(võib olla ka vektor). Ühikuks on
teepikkus/aeg e. 1
m/s (meetrit/sekundis).kiirendus
- Kiirendus
(tähis a) on vektoriaalne
füüsikaline suurus, mis väljendab kiiruse muutumist ajaühiku
kohta. Kiirenduse mõõtühik SI-süsteemis on 1 meeter sekundi ruudu
kohta
( 1 m/s2).
Kiirendus (hetkkiirendus) on kiiruse tuletis aja järgi ehk nihke
teine tuletis aja järgi. Kiirendus võib olla nii positiivne kui ka
negatiivne. Negatiivset kiirendust nimetatakse kõnekeeles
aeglustumiseks.Kui kiiruse muut on võrdsete ajavahemike puhul
võrdne, on tegemist ühtlase kiirendusega. Üldjuhul on tegu
mitteühtlase kiirendusega. Kiirendusvektor lahutub kiirenevalt
liikuva keha või masspunkti trajektoori igas punktis trajektoori
puutuja sihiliseks tangentsiaalkiirenduseks ning sellega risti
olevaks normaalkiirenduseks ehk tsentrifugaalkiirenduseks.
Loeng 3
- Newtoni kolm seadust: sõnastused.
- Iga keha seisab paigal või liigub ühtlaselt sirgjooneliselt kui talle ei mõju teised kehad või kui nende kehade mõjud kompenseeruvad .
- Keha kiirendus on võrdeline talle mõjuva jõuga ning pöördvõrdeline keha massiga.
- Kaks keha mõjutavad teineteist alati jõududega, mis on suuruselt võrdsed ja suunalt vastupidised.
Newtoni originaal-formuleeringud:
1.
Iga keha säilitab oma oleku kas paigalseisu või ühtlase
sirgjoonelise liikumise kujul seni, kuni temale rakenduvad jõud seda
olekut ei muuda.
2.
Liikumishulga muutus on võrdeline kehale mõjuva jõuga
ning toimub samas suunas mõjuva jõuga.
3.
Jõud esinevad ainult paariti : iga mõjuga kaasneb alati
niisama suur, kuid vastassuunaline vastumõju.
- Kilogramm ja tema etaloon.
Kilogramm (kg) on massi ühik: 1 kilogramm on ühe kuupdetsimeetri
10-3m3 puhta vee mass temperatuuril 4°C ja
rõhul 1.013 MPa.
(Kilogrammi etalooniks on plaatinast silinder,
mida hoitakse Rahvusvahelise Kaalude ja Mõõtude Büroos Pariisis.)Loeng 4
TÖÖ on keha liikumisoleku muutumise mõõt, mis on võrdne keha
poolt läbitud tee pikkuse ning kehale mõjuva jõu liikumissuunalise
komponendi korrutisega.Kineetiline energia on liikuva keha energia. Et selle keha liikumist
peatada, tuleb teha samapalju tööd, kui kulus keha liikuma
panemiseks.
Potentsiaalne energia on süsteemi energia, mis on tingitud keha
asendist ja mõjust süsteemi teiste kehade suhtes ja kõigi
süsteemis olevatele
kehadele vastastikku mõjuvatest jõududest
välises jõuväljas. Seega võrdub süsteemi potentsiaalne energia
potentsiaalsete jõududega, mis mõjuvad süsteemi kõigile osadele
(nii välis kui sisejõud) süsteemi üleminekul vaadeldavast (lähte)
olukorrast ehk nõndanimetatud nullkonfiguratsioonist või
nullnivoost. Nullkonfiguratsioonis loetakse süsteemi potentsiaalne
energia
tinglikult nulliks. Nullpunkti valik võib olla suvaline,
tavaliselt võetakse maakera raskusjõuväljas selleks
maapind .
Potentsiaalse energia tähiseks on Ep
vahel ka Wp ja mõõühikuks džaul (J).
Ep=mgh või raskusjõu
F kaudu
Ep=Fh.
Energiat , mille töö muutub mehhaaniliseks energiaks nimetakatakse
konservatiivseks jõuks ning energiat mitte säilitavat jõudu
(töö muutub tavaliselt soojuseks või elektrienergiaks)
nimetatakse
mittekonserrvatiivseks (
näit. hõõrdejõud,
takistusjõud).
Loeng 5
- Raske mass ja inertne mass.
Raske mass väljendab keha võimet tõmmata ligi teisi kehi
ehk gravitatsioonivõimet.
Inertne mass väljendab keha
inertsi ehk võimet säilitada oma liikumise kiirust
(selle
muutmiseks on tarvis rakendada jõudu).
Raske ja inertne mass
on ekvivalentsed; pole olemas füüsikalist eksperimenti, mis
võimaldaks nende vahel vahet teha.Loeng 6
- Pöörlemisvektorid: pöördenurk, jõumoment, nurkkiirus ja -kiirendus.
Pöörleva keha pöörlemistsenter on määratud kohavektoriga
(pöörleva keha asukoht ruumis), pöörlemistelg aga sellest
punktist lähtuva sirge –
pöörlemisvektoriga,
millega saab edasi anda kogu pöörlemisvõrrandi. Selleks on vaja
suurust:
pöördenurga vektor on
vektor, mille moodul võrdub pöördenurgaga ja mille suund antakse
piki pöörlemistelge nii, et keha pöördumisel ümber telje kehtiks
"parema käe
kruvireegel ":
kui keha pöörlemissuund
võtta tavalise (parempoolse vindiga) kruvi pöördumissuunaks, siis
ühtib kruvi liikumissuund pöördenurga vektori suunaga ( pudeli avamine);nurkkiiruse vektor on
vektor, mille moodul võrdub
nurkkiirusega ning mille suund piki
telge ühtib pöördenurga suunaga, kui nurk suureneb ja on sellega
vastassuunaline, kui pöördenurk väheneb;
nurkkiirenduse vektor on
vektor, mille moodul võrdub nurkkiirendusega.
Pöörlemisvektorid pole tegelikult õiged vektorid: neid ei saa
liita-lahutada, ka ei kehti nende jaoks taustsüsteemi vahetuse
valemid. Et märkida erinevust
"õigete vektoritega",
nimetatakse neid
aksiaal- ehk pseudovektoriteks.
Loeng 7
- Rõhk, rõhumisjõud, pindala vektor.
Rõhk
on füüsikaline suurus, mis võrdub pinnale risti mõjuva jõu ja
pindala suhtega:
,
kus
p on rõhk,
F on jõud ja
S on pindala. Rõhu
ühik SI-süsteemis on
paskal,
mis vastab
rõhumisjõule 1 njuuton ruutmeetri kohta
.
Kui välisjõud mõjub tahkele kehale, siis annab keha rõhu edasi
mõjuva jõu suunas. Vedelikud ja gaasid alluvad Pascali
seadusele (
rõhk kandub vedelikus või gaasis edasi
igas suunas ühteviisi).
Rõhumisjõud on jõud, millega mõjutab rõhk pinnaühikut,
ehk on rõhu ja mõjutatava pindala korrutis. Silindrilises anumas
oleva vedeliku rõhumisjõud anuma põhjale võrdub vedelikusamba
kaaluga. Siit järeldub, et vedeliku rõhk anuma põhjale avaldub
p=Fr/S=m∙g/S. Seega saame
p=ρ∙V∙g/S=ρ∙h∙S∙g∙/S=ρ∙g∙h ehk sõnades:
vedeliku rõhk anuma põhjale võrdub vedeliku tiheduse
ρ,
vaba langemise kiirenduse
g ja vedelikusamba kõrguse
h
korrutisega. Samal sügavusel avaldab vedelik sama suurt rõhku ka
anuma külgseintele ja isegi vertikaalselt üles.
Pindala vektor on vektor, mille moodul võrdub pinnatüki
pindalaga, suund aga ühtib selle pinna normaaliga.
Loeng 8
Absoluutse
(Kelvini) temperatuuriskaala
nullpunkt 0K vastab
temperatuurile -273°C, mis on isobaaride
(V=0) lõikepunktiks
t°-
teljega . Kraadi suurus Celsiuse ja Kelvini skaalal on sama
(defineeritud vee kolmikpunkti kaudu – 1K=1/273,16). Absoluutne
temperatuur
(K) T=t°C+273.
Olekuvõrrand annab seose gaasi olekuparameetrite
p, V ja
T
vahel
tasakaaluolekus. Termodünaamikas ei räägita
gaasist, vaid selle
olekust, ehk olekuparameetrite väärtuste
komplektist. Olekuparameetrite muutumist nimetame termodünaamikas
protsessiks; kui see on väljendatav tasakaaluolekute ajalise
järgnevusena, on protsess
tasakaaluline.
- Gaasi universaalkonstant.
Kui gaasi kogust mõõta moolides, on olekuvõrrand kõigi gaaside
jaoks ühesugune. .
Konstanti
R nimetatakse gaasi universaalkonstandiks.
- Aur: absoluutne ja relatiivne niiskus.
Kineetilise energia toimel vedelikust väljunud molekule, mis
moodustavad vedeliku pinna kohal
gaasilise keskkonna, mida
nimetatakse
auruks. Veeauru
tegelikku hulka õhus nimetatakse
absoluutseks niiskuseks, selle suhet osarõhule
pk
vastavasse veeauru hulka
suhteliseks niiskuseks.
(Nii
tähendab relatiivne niiskus temperatuuril 20° C 70% seda, et 1 m3
õhku sisaldab 12.1 g veeauru (70% 17.3-st)). - Molekulidevahelised jõud.
Iga molekuli ümbritseb kaks jõuvälja: tõukejõud ja tõmbejõud.
Tõukejõudude väli, kahaneb kauguse kasvades kiiremini,
tõmbejõudude väli aga aeglasemalt. Molekuli lähedale sattunud
osake algul tõmmatakse külge
(tõmbejõud ulatuvad kaugemale),
seejärel aga pidurdatakse tõukejõudude poolt.
Tasakaaluoleku määrab potensiaalse energia miinimum; kui
soojusliikumist ei oleks, asuksid osakesed teineteisest kaugusel
kindlal kaugusel, ning tekiks
korrapärane kristallvõre.
Soojusliikumise tõttu lisandub kineetiline energia, mille tulemusena
koguenergia suureneb
Ek võrra. Mida soojem
on aine, seda
suuremaks muutub osakese
liikumisvabadus tasakaaluasendi suhtes. Alates teatud temperatuurist ulatub "lubatud"
kaugus tasakaaluasendist naaberosakesteni ja nii võib vaadeldav
molekul ainetüki piires vabalt "rännata", jäädes
viimasega ikkagi seotuks. See on
vedel olek. Kui kineetiline energia saab võrdseks-suuremaks molekulaarjõudude
potentsiaalsest energiast, hakkavad molekulid ruumis vabalt liikuma.
Aine läheb
gaasilisse olekusse.
Loeng 9
- Soojusmahtuvus, erisoojus, moolsoojus.
soojusmahtuvus – soojushulk dzaulides
(J), mis tõstab
keha
temperatuuri ühe kelvini
(K) võrra.
erisoojus –
c, soojushulk
(J), mis tõstab
antud
aine massiühiku
(kg) temperatuuri 1 K võrra.
moolsoojus = soojushulk
(J), mis tõstab antud
aine ühe
mooli temperatuurir 1 K võrra.
Cv- isohooriline moolsoojus -
kui
soojendamine toimub konstantse ruumala juures;
Cp- isobaariline moolsoojus -
kui soojendamine toimub konstantsel rõhul.
Diferentsiaalne jaotusfunktsioon näitab, kui suur on mingisse
kiiruste (kõrguste) vahemikku kuuluvate molekulide osakaal.
Integraalne (kumulatiivne) jaotusfunktsioon näitab, kui palju on
antud energiast suurema energiaga molekule.
Integraalne jaotusfunktsioon saadakse diferentsiaalse
jaotusfunktsiooni integreerimisel
v-st lõpmatuseni;
aga võib ka integreerida suvalises vahemikus, saades teatud kiiruste
vahemikku kuuluvate molekulide suhtelise hulga. Diferentsiaalse
jaotusfunktsiooni leidmiseks tuleb lahendada pöördülesanne:
diferentseerides integraalset (Boltzmanni) jaotust jõuda
diferentsiaalse (
Maxwelli ) jaotuseni.
Loeng 10
Soojusmasin on seade, mis muudab soojusenergia mehaaniliseks tööks
(või vastupidi – külmutusmasin, soojuspump).
Masina tööks vajalikku soojust võib saada kütuste põletamisel,
päikese- või tuumaenergiast, vulkaanilistes piirkondades
kasutatakse ka Maa-sisest (geotermaalset) soojust. Mehaaniline töö
tehakse gaaside paisumisel; et aga masin töötaks pidevalt, tuleb
paisunud
gaas uuesti algolekusse kokku suruda.
Koosneb 3 osast: soojusallikast, kus kütuse põletamisel tõstetakse
gaasi temperatuuri; tööorganist (
silindris liikuv
kolb ), kus gaasi
paisumisel tehakse mehaanilist tööd; jahutajast, kus silindris
oleva gaasi temperatuuri alandatakse enne järgnevat kokkusurumist.
Ringprotsess on
termodünaamiline protsess,
mille lõppolek langeb ühte algolekuga. Kasulik töö tekib
ringprotsessil siis, kui kokkusurumine toimub madalamal rõhul, kui
paisumine. Et väiksem rõhk antud ruumala juures tähendab madalamat
temperatuuri, tuleb töötavat gaasi enne kokkusurumist jahutada,
pärast kokkusurumist aga
soojendada . Kuna
jahutaja poolt ärajuhitav
soojushulk pärineb ka soojendilt, ei muutu kasulikuks tööks mitte
kogu energia.
Soojusmasina kasutegur on masina poolt tehtava töö ja soojendilt
saadud energia suhe. .
Taandatud soojuseks nimetatakse soojushulga ja temperatuuri suhet
Q/T=const. Taandatud soojus on seda suurem, mida
madalamal temperatuuril toimub soojusülekanne. Taandatud soojus
väljendab energeetilist kvaliteeti. Ülekantavast soojushulgast
saab
seda rohkem mehaanilist tööd, mida suurem on ülekandel
temperatuuride vahe -
st., mida kõrgem on
algtemperatuur ja mida madalam lõpptemperatuur.
Et temperatuuri languse määrab äraantud soojushulk, on järelikult
madalamale temperatuurile antav
(suurema taandatud soojusega )
soojushulk energeetiliselt efektiivsem.
VALEMID (SEADUSED)
Loeng 2
- Keha liikumisvõrrand ( vektorina ja koordinaatides).
Liikumisvõrrand väljendab keha asukoha (kohavektori, st. selle
kolme koordinaadi) sõltuvust ajast. Vektorina on liikumisvõrrandiks
vektorvõrrand ,
kus
x(t), y(t) ja
z(t) on kolm sõltumatut funktsiooni
(liikumisvõrrandit võib käsitlleda ka kui kolmest tavalisest võrrandist koosnevat võrrandisüsteemi).Klassikalises (Newtoni) mehaanikas antakse liikumisvõrrand
tavaliselt kas teist järku diferentsiaalvõrrandi või
ruutpolünoomi kujul.
Neist esimene kujutab Newtoni II seadust, teine ühtlaselt muutuva
liikumise valemit, kus algasend ,
algkiirus ning
kiirendus on
antud vektorkujul.
Tähistades pöördenurga ,
nurk-kiiruse ning
nurk-kiirenduse ,
saame kulgliikumisega analoogilise võrrandi: .
Pöördenurga ühikuna
võib kasutada kõiki nurgamõõdu ühikuid, nagu kraad, radiaan,
täispööre. SI-süsteemi ühikuks on radiaan
(nurgamõõdu ühik,
mis on võrdne ringjoone raadiuse pikkusele kaarele toetuva
kesknurgaga; 1 täispööre võrdub
radiaaniga.)Loeng 3
- Newtoni II seadus (kiirendus- ja impulssesitus).
Kiirendus
(liikumisvõrrandi II järku tuletis) on kehale
mõjuva jõu ja massi suhe ;
impulss ehk liikumishulk on keha massi ja liikumiskiiruse korrutis .
- Kulgliikumise diferentsiaalvõrrand ( vektorkuju ja koordinaatesitus).
- Kulgliikumise diferentsiaalvõrrandi lahendamine jõu puudumisel ning konstantse jõu korral(tuletusega).
a)
Kui jõud on null, on võrrandiks .
Integreerides saame: ,
,
kus ja
on
integreerimiskonstandid, mis võrduvad kiiruse x-komponendi ning keha
x-koordinaadi väärtustega ajahetkel
t=0. Jõudude puudumisel
või nende summa võrdumisel nulliga liigub keha ühtlaselt
(muutumatu kiirusega).
b) Kui jõud on konstantne (raskusjõud: ,
hõõrdejõud: ),
on võrrandi
lahendiks polünoom .
Konstantse jõu korral keha kiirus kasvab või kahaneb ühtlaselt
(muutumatu kiirendusega).
Loeng 4
,
kus ning
tähistab
vektorite vahelist nurka.
Sirgliikumise ning muutumatu jõu korral saab tööd arvutada
vektorite skalaarkorrutisena: .
Kõverjoonelisel liikumisel või muutuva jõu korral kehtib töö
valem lõpmata väikesel nihkel .
Pikema liikumise korral tuleb töö leidmiseks võtta integraal: .
Kuna tegu on
joonintegraaliga (integreerimine toimub pikki joont punktist a punktini b), ei tohi sulge avada. Et seda
integraali arvutada, tuleb kõik integraali all olevad muutujad anda
liikumisvõrrandi abil
aja funktsioonidena, taandades integraali tavaliseks ühemõõtmeliseks
(määratud) integraaliks.
Sellekks tuleb iga
ajahetke jaoks leida keha asukoht (liikumisvõrrandist) ja jõu
valemist
jõu
kolm komponenti ning korrutada neid vastavate koordinaatide muutudega
.
Alles siis võib integraali anda kolme eraldi integraali summana - kusjuures nad kõik on integraalid aja, mitte
koordinaatide järgi. Sellist teguviisi nimetatakse joonintegraali viimiseks parameetrilisele kujule . - Kineetiline energia kulgliikumisel (tuletusega).
Vaatleme lihtsaimat juhtu, kus kehale massiga
m mõjub
konstantne jõud
.
Et asi lihtsam oleks, võtame taustsüsteemi, kus keha hetkel
t=0
on paigal
.
Selline keha hakkab liikuma sirgjooneliselt (jõusuunalise
kiirendusega) ja hetkeks
t on tema kiirus:
.
Arvutame nüüd jõu
poolt
ajavahemiku
t jooksul tehtud töö. Et liikumine oli
jõu mõjumissuunas, on vektorite vaheline nurk null ja selle
koosinus 1. Järelikult on töö
A võrdne jõu
F
ja läbitud tee pikkuse
s korrutisega. Viimase
leiame valemist
ja
töö
.
Suuruse
Ft leiame kiiruse valemist:
ja
asendame töö valemisse:
.
See töö kulus liikuma pandud keha energia
suurendamiseks : juhul,
kui keha
seisis enne jõu mõjuma hakkamist paigal. Leitud suurust
nimetatakse
keha kulgeva liikumise kineetiliseks energiaks. Kui keha
liigub algul näiteks kiirusega
v0,
on tehtud töö võrdne kineetilise energia
muutusega
.
Seda isegi juhul, kui jõud on
esialgse liikumissuunaga nurga all.
- Potentsiaalne energia raskusjõu väljas ja elastse keha venitusel.
Potentsiaalse energia muutumise valem sõltub jõudude tüübist.
Raskusjõu korral on üles tõstetavale kehale mõjuv jõud
konstantne ( )
ning tehtav töö on võrdeline kõrguse muutusega ( ),
kuna raskusjõud ning
vertikaalnihe on
vastassuunalised.
Vedru venitamisel kasvab elastsusjõud võrdeliselt
venituse ulatusega (deformatsiooni suurusega, )
ning .
(integreerimistee otspunkdid on –l1 ja
l2).Mehaanilise koguenergia muutus on võrdne välisjõudude poolt tehtud
tööga, välisjõudude töö puudumisel on koguenergia muutus null
st. koguenergia on muutumatu e. jääv.
ja
kogu tehtud töö ,
kus .
Kui süsteemile mõjuvate välisjõudude summa on null, on süsteemi
kehade impulsside summa jääv suurus.
Loeng 5
- Ülemaailmne gravitatsiooniseadus.
Mistahes kaks keha tõmbavad teineteist jõuga, mis on võrdeline
nende kehade massidega ja pöördvõrdeline nende vahelise kauguse
ruuduga.
Liikuv keha, mille asukoha määrab kohavektor ,
on nüüd gravitatsioonilises vastasmõjus taustkehaga. Talle mõjub
gravitatsioonijõud, mis on suunatud taustkeha - koordinaatide
alguspunkti poole. Sellist jõudu on lihtne kirja panna: .
Sulgude ees olev liige
(Newtoni gravitatsioonivalem) määrab
jõu suuruse, sulgudes olev (ühik)vektor aga selle suuna. Et
kohavektori suund on tõmbejõule vastassuunaline, tuleb ühikvektori
ette
miinusmärk. Näeme, et vaadeldavale (proovi)kehale mõjuv jõud
sõltub ruumikoordinaatidest, st. tegu on
jõuväljaga.
Gravitatsioonivälja tugevuseks nimetame jõuväljas olevale
kehale mõjuva gravitatsioonijõu suhet selle keha massiga.Loeng 6
- Newtoni seadused pöördliikumise korral (II seadus tuletusega, punktmassi abil).
Eraldame vaadeldavast kehast tükikese massiga
dm. Sellele
massile mõjub jõud
dF, mis peaks
panema tükikese liikuma
jõu suunas kiirendusega .
Kuna punktid, mis asuvad pöörlemisteljel, jäävad paigale, peaks
keha kuju
muutuma - see aga pole lubatud. Keha kuju säilib vaid
juhul, kui tükike
(koos kogu kehaga !) pöördub ümber
telje, st. liigub risti nii telje kui ka teda teljega ühendava
sirglõiguga
r, mistõttu mõjutab pöörlemist ka sama
suunaline jõu komponent.
Lihtsustamiseks kujutame, et tegu on
"normaalse"
punktmassiga
m ja
"normaalse" jõuga
.
Veel oletame, et jõud mõjub risti pöörlemisteljega. Selle jõu
mõjul saab tükike kiirenduse ,
kus ja
on
nurk jõuvektori ning
tükikest pöörlemisteljega ühendava raadiuse suuna
vahel. Kuna ,
kus
l on jõu õlg,
same : ,
kus
M=Fl on jõu moment
ette antud telje suhtes.
Kirjutame antud valemi pöörlemise kinemaatika suurustega. Pöörde
ulatust mõõtis pöördenurk ,
mille esimeseks tuletiseks aja järgi oli nurkkiirus ning
teiseks tuletiseks nurkkiirendus .
Et pöördenurka mõõdeti radiaanides
(ringjoone kaare pikkuse ja
raadiuse suhe!), on pöördenurga suuruseks ning
vastavalt .
Tuletame pöörlemise dünaamika põhivõrrandi: ,
kus
I=mr2 on meie “tükikese”
inertsimoment. .
Kui keha on ühtlase tihedusega, saab seda teisendada integraaliks ,
kus on
tihedus ning
integral võetakse üle kogu ruumala ning
r on
tükikese
dV kaugus teljest. Integraali saab leida
ainult korrapäraste kehade puhul.
- Pöörlemisvektorite avaldamine vektorkorrutisena.
Pöörleva keha mingi punkti
joonkiirus (tangensiaalkiirus): ,
kus on
vaadeldava punkti kohavektor, aga
pöörlemistsentri kohavektor.
Samasugused valemid saame teha ka pöörleva keha suvalise punkti
nihke ning tangentsiaalkiirenduse tarbeks.
- Inertsimomendi, impulssmomendi (pöördimpulsi) ja pöörlemisenergia valemid (tuletusega, punktmassi abil).
Inertsimoment:
Keha
Inertsimomendi avaldis
Õõnes silinder või peenike rõngas (raadius R), sümmeetriatelje suhtes
I=mR2Täis silinder või ketas, sümmeetriatelje suhtes
Õhuke ketas, telg ketta tasandis läbi masskeskme
Peenike varras (pikkus
l), telg risti läbi masskeskme
Peenike varras, telg risti läbi otspunkti
Sfäär
Kera
Ristkülikukujuline plaat (küljed
a, b), telg risti läbi masskeskme
Impulssmoment
(pöördimpulss, pöörlemishulk):
.Pöörlemisenergia:
Veeremisel on keha kulgliikumise kiirus
v on
võrdne veereva keha raadiuse
r ja pöörlemiskiiruse
korrutisega.
Loeng 7
- Pascali seadus (tuletusega).
Rõhk on vaadeldavale kehale mõjuv rõhumisjõud pinnaühiku
kohta. Vedelikud ja gaasid annavad rõhku edasi kõigis suundades
ühteviisi
( Pascal 'i seadus). ;
,
kus on
rõhumisjõud ja on
pinnatüki
ristsirge e. normal.
Raskusjõud mõjub ka vedeliku sees. Seetõttu lisandub iga
vedelikuosakese jaoks lisaks naaberosakeste rõhule ka osakese enda
kaal. Koos sellega muutub tasakaaluvõrrand. Nt. kuubi jaoks
kirjutame tasakaaluvõrrandi .
Et külgtahkudele mõjuvad jõud on võrdsed ja vastassuunalised,
saame ja
,
mis jätab võrrandisse kolm liiget: ,
kus on
vedeliku tihedus ja
V=hS kuubi ruumala. Et kõik need
vektorid on samasihilised võime kirjutada skalaarse võrrandi, votes
märgid vastavalt vektorite suunale: .
h on kuubi kõrgus. Kui kuubi ülaserv asub vedeliku pinnal,
on
p1=0 ning
valem saab lihtsa kuju: ,
kus
h tähistab sügavust - kaugust vedeliku pinnani.
Näiteks saame vee rõhuks 100 m sügavusel .
(vedelikuhulga mass avaldatakse tiheduse kaudu).
Kui meil on vaja teada massi, mitte ruumala, peame vedelikuhulga
korrutama vedeliku tihedusega.
See lihtne tehe sisaldab aga
varjatud eeldust , et vedeliku tihedus on kõikjal ja alati
ühesugune. Kõigis veekogudes - ka veevärgi torudes -
kasvab rõhk sügavuse h kasvades 9800 paskalit iga meetri kohta.
Tegelikkuses on vedelikud nagu tahked kehadki kokkusurutavad (tihedus
sõltub rõhust), ka esineb vedelikel soojuspaisumine (tihedus sõltub
temperatuurist). Õnneks on need muutused väga väikesed ja
seepärast võib klassikaline hüdrodünaamika neid mitte arvestada.
Et asi täpne oleks, räägitakse sel juhul ideaalsest
vedelikust, mille tihedus on alati ühesugune, mis ei lähe
kunagi keema ja mis voolab ilma takistusteta. Archimedese seadus.
Kujutame ette, et meil on
kuup tihedusega ja
massiga .
See kuup pole tasakaalus: talle mõjub rõhkude vahest tingitud
üleslükkejõud ning
keha kaal .
Keha kaaluks vees saame .
Archimedese sõnastuses:
Vedelikku asetatud kehad kaotavad oma kaalust osa, mis on võrdne keha poolt välja tõrjutud vedeliku
kaaluga. (kui
oli
keha kaal, siis
on
keha ruumalale vastava vedelikuhulga kaal, mida võib nimetada ka
välja tõrjutud vedeliku kaaluks.) - Bernoulli võrrand (tuletusega).
Kui rõhutasakaal puudub, hakkavad vedelikuosakesed liikuma.
Osakesele mõjuv jõud tähendab, et Sel
juhul räägime
rõhuväljast, mis on skalaarne väli;
sellisesse välja sattunud osakestele mõjub jõud ja nad hakkavad
liikuma. Vedeliku liikumist nim. voolamiseks.
Reaalse vedeliku korral on osakeste kiirused torus erinevad, seetõttu
tuleb mõõta voolu kiirust torust välja voolava veehulga kaudu.
Ideaalse vedeliku korral on kiirused võrdsed ning kirjeldused
ekvivalentsed. Nii saame toru aja jooksul
mistahes ristlõiget läbivaks veehulgaks ;
kiiruseks
ajaühikus toru ristlõiget läbinud vedeliku hulga
järgi on seega suhe .
Pidevuse teoreem: Vedeliku voolamisel muutuva ristlõikega
torus on voolamise kiirus pöördvõrdeline toru ristlõike
pindalaga. Bernoulli võrrand: See on energia jäävuse seadus. Vaatame kaldu asetsevat muutuva
ristlõikega toru. Valime kaks ristlõiget: ühe kõrgusel
h1
ja pindalaga
S1, teise
kõrgusel
h2 ristlõikega
S2
ning arvutame vedeliku voolamisel läbi sellise toru ajavahemikul
tehtava
töö:
(esimene
liige on võetud negatiivne, kuna siin on ristlõikepinna vektori
suund vastupidine kiirusvektori
suunaga).
Energia jäävuse seaduse kohaselt peab see olema võrdne mehaanilise
koguenergia muuduga .
Asendades massi tiheduse ja ruumala kaudu ,
rakendades pidevuse teoreemi ning
koondades sarnased liikmed, saamegi ülaltoodud võrduse, kus rõhk p
sõltub nii voolamiskiirusest kui toruosa kõrguses.
Loeng 8
- Ideaalse gaasi olekuvõrrand.
Boyle-Mariotte'i seadus:
Konstantsel temperatuuril on gaasi
rõhu ja ruumala korrutis jääv suurus. pV=const.
kui
T=const..
,
kus
Vm on moolruumala - ühe mooli gaasi
ruumala temperatuuril
T ning rõhul
p, R=8.314 J/mool∙K
on gaasi universaalkonstant.
Clapeyroni-Mendelejevi võrrand: .
- Van der Waals'i võrrand: parandusliikmete nimed ja tähendus.
,
kus
Vm on ühe mooli gaasi poolt täidetav
ruumala (moolruumala),
a ja
b aga
empiirilised konstandid.Konstant
b määrab nn
omaruumala - ruumala, mille
täidaksid NA (Avogadro arv) molekuli tihedalt kokku
pakituna. Konstant
a on keerukam, et on
rõhu dimensiooniga nimetatakse seda tihti siserõhuks.
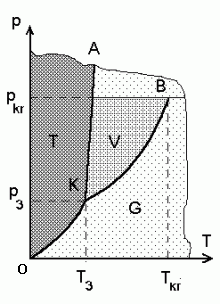
Olekute
jaotumist rõhu ja temperatuuri järgi nim.
olekudiagrammiks.
Tavaliselt esitatakse see -teljestikus
erinevate
faaside piirjoonte abil. Joonisel on kolmikpunkt tähistatud
K-tähega; seal ühinevad
sublimatsioonikõver
OK, aurustumiskõver KB (B on
kriitiline punkt) ja
sulamiskõver KA.
Sulamiskõverast vasakule jääb tahke faasi piirkond; selle ja
aurustumiskõvera vahele vedel faas (ulatub vaid
kriitilise temperatuurini
Tkr, graafikul punkt
B)
ning ülejäänud osa võtab enda alla gaasiline faas.
Tahkumistemperatuur (kõver KA) ei sõltu rõhust.
Keemistemperatuur (kõver KB) on seda madalam, mida madalam on rõhk. Kolmikpunktist K
allpool vedel faas puudub. Kriitilisest temperatuurist (punkt B)
kõrgematel temperatuuridel kaob erinevus vedela ja gaasilise faasi
vahel.
Olekudiagramm.
Loeng 9
- Rõhk molekulide impulsi muutuse kaudu (tuletusega).
Asendades olekuvõrrandis ainehulga
z molekulide arvuga
N=nV=zNA, saame ,
kus (Boltzmanni
konstant).
Et impulssesituses avaldub Newtoni II seadus kujul ,
võime rõhu
avaldise kirjutada ,
kus on
kõigi ajavahemikul vastu
pinnatükki
S põr molekulide
summaarne impulsimuutus.
Oletame, et kõik molekulid liiguvad võrdsete kiirustega ja pind
S,
millele mõjuvat rõhku arvutame, asub
yz-tasandis.
Põrgete arvu rehkendame molekulide ruumtiheduse
n
(molekulide arv kuupmeetris) ja liikumiskiiruse
v abil.
Kui molekulid liiguksid kõik
x-telje ehk baasivektori
suunas,
jõuaks meie pinnatükini ajavahemiku jooksul
molekuli.
Kui lugeda põrge
seinaga absoluutselt elastseks, hakkaksid molekulid
pärast põrget liikuma
vastassuunas ja sama kiirusega - ,
seega muutuks nende impulss võrra.
Pinnatükile
S mõjuva rõhu valemis asendame ja
saame rõhu
p väärtuseks .
Paraku ei anna see valem meile otsitavat rõhku. Molekulaarfüüsika
üheks
eelduseks ,
mida kinnitab toosama Browni liikumine, on
see, et molekulid liiguvad
kaootiliselt, st kõikvõimalikes
suundades ja kõikvõimalike kiirustega. Et leida õiget rõhku,
tuleb meil arvutada keskväärtus. Teeme asja pisut lihtsamaks,
oletades, et gaas koosneb ühesugustest molekulidest. Ja nüüd
statistika: Pinnatüki
S poole liiguvad pooled
molekulid -
jagame leitud rõhu kahega; Iga kiiruse ruut avaldub
kolme komponendi
vx, vy,
vz ruutude summana. Meile läheb
korda vaid
x-komponent, mis on üks kolmandik kolme
komponendi ruutude
summast - jagame tulemust veel kolmega; Asendame
molekulide kiiruste ruutude summa nende
ruutkeskmise kiirusega ja
saame tulemuseks .
Et valemis on rõhk võrdeline molekulide ruumtihedusega
n,
saame lahti veel ühest piirangust. Me ei pea enam jälgima, et
molekulid oleks ühesugused. Kui meil on näiteks segu kolmest
gaasist tihedustega n1, n2, n3,
saame kogurõhuks .
Gaaside segu rõhk on võrdne komponentide osarõhkude summaga.
Kui asendame ,
tuleb välja, et ,
ehk rõhk võrdub 2/3 molekulide kineetilisest energiast ruumiühiku
kohta. Asendame siia rõhu avaldise molekulide ruumtiheduse ja
temperatuuri kaudu: .
Boltzmanni jaotuse saame, kui asendame baromeetrilises valemis
potensiaalse energia
mgh kineetilise energiaga
mv2/2 - Maxwelli jaotus (tuletuseta).
Tasakaaluline kiiruste jaotus. Kuna rõhk ja siseenergia avaldusid
keskmise kiiruse kaudu, peaks molekulaarfüüsika seisukohalt olema
lõpmatu arv kiiruste jaotusi, mis vastavad ühele ja samale olekule
(samale temperatuurile). Molekulaarfüüsikas väidetakse, et
kõigist neist võimalikest jaotustest on üks suurima tõenäosusega
jaotus, mida nimetatakse tasakaaluliseks jaotuseks. Molekulide
omavaheliste põrgete käigus toimub pidev energiavahetus, mille
tõttu muutuvad molekulide kiirused ja lõppkokkuvõttes ka kiiruste
jaotuse iseloom; tasakaaluline jaotus on selline, kus
energiavahetused kiiruste jaotust ei muuda - mingist kiiruste grupist
põrgete tagajärjel lahkuvate molekulide arv on võrdne sinna
teistest gruppidest
tulevate molekulide arvuga.
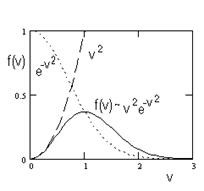
Maxwelli jaotus on
diferentsiaalne jaotusfunktsioon,
mis väljendab mingi kiirusega osakeste
suhtelist hulka. ,
kus
c1 ja
c2
on konstandid ning
n funktsiooni asümptoodile vastav
astendaja . Selle, astme- ja eksponentfunktsiooni korrutisena saadava
kõvera kujunemist illustreerib toodud
graafik .
Maxwelli jaotus ja selle "piirajad" - funktsioonid
v2
ning
exp(-v2) Integraalse
jaotusfunktsiooni saame diferentsiaalse jaotusfunktsiooni
integreerimisel.
- Ülekandenähtused (tuletuseta).
Ülekandenähtuste all mõistame soojuse, keemilise koostise, impulsi
või muu parameetri levikut gaasis.
Difusioon: ;
D – difusioonitegur;
Soojusjuhtivus: ;
–
soojusjuhtivustegur ;
Sisehõõre: ;
–
sisehõõrdetegur.
Loeng 10
- Termodünaamika I printsiip (valem).
Gaasile antav soojushulk on võrdne siseenergia juurdekasvu ning
paisumisel tehtava töö summaga.
- Töö isotermilisel protsessil (tuletusega)
Isotermilisel protsessil, kus
temperatuur konstantne,
tuleb avaldada rõhk ruumala ja temperatuuri kaudu ning lahendada
diferentsiaalvõrrand:
dA=p(V)dV.Avaldame
p olekuvõrrandist: ,
millest pärast integreerimist saame .
Isotermiline protsess: et
T=const. , siis
ja
Q=A.Adiabaatiline protsess toimub soojusvahetuseta (
Q=0).
Adiabaatilise protsessi korral .
Olekuvõrrand, tuleb viia nn.
polütroobi kujule.
Polütroobiks nimetame sõltuvust ,
kus astendaja
n võib omada
suvalist väärtust. Nii
võiks polütroopseiks lugeda ka isotermilist (
n=1) ja
isegi isobaarilist (
n=0) protsessi.
Adiabaadi võrrandi leidmiseks asendame rõhu
p olekuvõrrandist
ruumala ja temperatuuri kaudu. Lihtsuse mõttes loeme gaasi hulga
võrdseks ühe mooliga ( ).
Saame: .
See kujutab lõigukest adiabaatilist protsessi
pV-
diagrammil kujutavast kõverast. Kogu kõvera saame, eraldades muutujad ning
integreerides:
Kui
asendada siia olekuvõrrandist
T=(pV)/R,
saame
,
mis ongi adiabaadi võrrand, e.
Poissoni võrrand. Astendajat
(moolsoojuste
suhe) nimetatakse adiabaadi astendajaks ja teda on lihtne leida
vabadusastmete arvu
i järgi: .
- Ideaalse soojusmasina kasutegur (tuletusega, Carnot ' protsessi abil).
Oma valemi tuletamisel lähtus Carnot' asjaolust, et
suvalist kinnist tsüklit pV-diagrammil saab
esitada lõpmata väikeste, suvaliselt ülesehitatud tsüklite
summana täpselt samuti, nagu tehakse matemaatikas pindintegraalide
arvutamisel. Seega on otstarbekas valida elementaartsükliks
võimalikult lihtsasti arvutatavate protsessidega piiratud tsükkel.
Niisugusteks protsessideks on adiabaat (ei toimu
soojusülekannet) ning isoterm (soojusülekanne toimub konstantsel
temperatuuril. Kahest isotermist ning kahest
adiabaadist koosnevat ringprotsessi nimetataksegi Carnot' tsükliks.
Arvutame Carnot' tsüklil töötava soojusmasina kasuteguri. Selleks
peame kogu tsükli vältel tehtava töö
A1+A2+A3+A4 jagama gaasile isotermilisel paisumisel antava soojushulgaga .
Töö isotermilisel kokkusurumisel avaldub samasuguse valemiga .
Et adiabaatilisel protsessil soojusvahetust ei toimu, saame
Q2=Q4=0
ning .
Kasuteguri
valemiks saame seega .
Asendades siia
Q1 ja
Q2
ning taandades ,
jääb valem .
Seose
V2/V1
ja
V4/V3
vahel saame adiabaadi võrrandist :
.
Jaganud võrrandid omavahel, taandanud temperatuurid ning kaotanud
astendaja, saame ja
asendades selle kasuteguri valemisse, saame lõplikult .
- Külmutustegur ja soojendustegur (tuletusega).
Külmutusmasia ja soojujspump töötavad
pööratud tsükliga,
st. kokkusurumine toimub kõrgemal, paisumine aga madalamal rõhul
(temperatuuril). Kasulik töö
A=A1+A2+A3+A4


















































































































































































































Kõik kommentaarid