SI-süsteem ehk rahvusvaheline mõõtühikute süsteem on mõõtühikute süsteem, kinnitati ja tunnistati eelistatud mõõtühikute süsteemiks oktoobris 1960 Pariisis toimunud Kaalude ja mõõtude XI peakonverentsi otsusega
SI-süsteem ehk rahvusvaheline mõõtühikute süsteem
on mõõtühikute süsteem, kinnitati ja
tunnistati eelistatud mõõtühikute süsteemiks oktoobris
1960 Pariisis toimunud
Kaalude ja
mõõtude XI peakonverentsi otsusega. SI-süsteem kasuta
b 7 füüsikalist suurust põhisuurustena
ning nende suuruste ühikuid nimetatakse
põhiühikuteks. Ülejäänud
füüsikaliste suuruste
mõõtühikud on määratud põhisuuruste kaudu. Põhiühikud: m(meeter), s(aeg), kg(mass),
K(temperatuur), A(elektrivoolu tugevus), mol(ainehulk), cd(kandela, valgustugevuse ühik).
SI tuletatud ühikud
Ühikud, mis on defineeritud põhiühikute kaudu.
Suurus
SI ühik
Avaldis teistes
ühikutes
Avaldis
põhiühikutes
nimi
sümbol
tasanurk
radiaan
rad
m·m-1=1
ruuminurk
steradiaan
sr
m2·m-2=1
sagedus
herts
Hz
s-1
jõud
njuuton
N
kg·m·s-2
rõhk, mehaaniline pinge
paskal
Pa
N/m2
m-1·kg·s-2
energia, töö, soojushulk
džaul
J
N·m
m2·kg·s-2
võimsus, soojusvoog
vatt
W
J/s
m2·kg·s-3
potentsiaal, pinge,
elektromotoorjõud (emj)
volt
V
W/A
m2·kg·s-3·A-1
elektriline mahtuvus
farad
F
C/V
m-2·kg-1·s4·A2
elektriline takistus
oom
Ω
V/A
m2·kg·s-3·A-2
kulon
C
F·V
A·s
elektrijuhtivus
siimens
S
A/V
m-2·kg-1·s3·A2
magnetvoog
veeber
Wb
V·s
m2·kg·s-2·A-1
magnetvootihedus (induktsioon)
tesla
T
Wb/m2
kg·s-2·A-1
induktiivsus
henri
H
Wb/A
m2·kg·s-2·A-2
valgusvoog
luumen
lm
cd·sr
m2·m-2·cd=cd
valgustatus
luks
lx
lm/m2
m2·m-4·cd=m-2·cd
radioaktiivse aine aktiivsus
bekerell
Bq
s-1
neeldumisdoos
grei
Gy
J/kg
m2·s-2
ekvivalentne kiirgusdoos
siivert
Sv
J/kg
m2·s-2
katalüütiline aktiivsus
katal
Kat
s-1·mol
Klassikalise füüsika kehtivuspiirkond – selle aluseks on Newtoni poolt formuleeritud 3
dünaamika põhiseadust. Klassikalises mehaanikas kasutatakse protsesside kirjeldamisel
trajektoori mõistet, mis esitub diferentsiaalvõrrandi(tesüsteemi) abil.
Mehaanika põhiülesanne on liikuva keha asukoha määramine, mistahes ajahetkel.
Taustsüsteem – on kella ja koordinaatsüsteemiga varustatud keha, mille suhtes liikumist
vaadeldakse.
Translatoorne liikumine ehk kulgliikumine on
jäiga keha mehhaaniline liikumine, mille
korral keha kõikide
punktide trajektoorid on igal hetkel samasihilised ja tervikuna ühesuguse
kujuga.
Üldjuhul on kulgliikumine täielikult kirjeldatud, kui on antud keha
kohavektori (ehk
koordinaatide)
sõltuvus ajast.
Pöörlemine ehk pöördliikumine on keha ainepunktide ringliikumine ümber kahe kehaga
seotud ainepunkti. Neid punkte ühendavat sirget nimetatakse pöörlemisteljeks. Tasandil saab
rääkida kehade pöörlemisest ümber mõne selle keha fikseeritud punkti.
Vektorid – suurused, mida iseloomustavad arvväärtus ja suund. Vektorite hulka kuuluvad
kiirus, kiirendus, jõud, nihe.
Skalaarid – suurused, mille määramiseks piisab ainult arvväärtusest. Skalaaride hulka
kuuluvad teepikkus, aeg, mass.
Vektorite liitmine – tehku mingi punkt läbi kaks järjestikust nihet. Kahe nihke summaks on
loomulik nimetada niisugust nihet, mis annab sama tulemuse nagu kaks esimest nihet kokku.
Vektorite lahutamine – kahe vektori A ja B
vaheks A-B nimetatakse niisugust vektorit C,
mis liidetuna vektoriga B, annab vektori A.
Vektorite korrutamine skalaariga – vektori A korrutamisel skalaariga α saadakse uus
vektor B, mille moodul on FαF korda suurem vektori A moodulist, suund aga ühtib vektori A
suunaga, kui skalaar α on positiivne, ning on sellega vastupidine, kui skalaar α on negatiivne.
Kui B=αA, siis B=FαFA.
Vektorite skalaarkorrutis – skalaarkorrutiseks vektorruumis V nimetatakse reeglit, mis igale
kahele vektroile u, v € V seab vastavusse skalaari u x v € R.
Vektorkorrutis – on vektor, mis on risti mõlema korrutatava vektoriga. Kui vektorid on
kollineaarsed (vektorite sihid paralleelsed), siis vektorkorrutis on nullvektor. Kui vektorid ei
ole kollineaarsed, siis vektorkorrutis on risti vektorite sihilise tasapinnaga. Vektorkorrutis
moodustab teguritega parema käe kolmiku.
Vektorite projektsioonid ja nende seos mooduliga – vektori projektsioon on skalaar. Kui
suund punktist 1 punktini 2 ühtib suunaga n, loetakse projektsioon positiivseks, vastasel juhul
A
B
C
on projektsioon negatiivne. Projektsiooni märgitakse sama tähega, mis vektorit, lisades
vektori projitseerimissuuna indeksi. Ax= A cos α, Ay= A cos β, Az= A cos γ.
Seos moodulitega: F AxF=F AxF, F AyF=F AyF, F AzF=F AzF .
Nihe s, m – on suunatud sirglõik, mis ühendab keha algasukoha lõppasukohaga.
Kõverjoonelisel liikumisel on kiirusvektor trajektoori puutuja sihiline. s= v0t+at2/2 ; s=(v2-
v02 )/2a
Kiirus v, m/s – ühtlasel sirgjoonelisel liikumisel näitab, millise nihke sooritab keha ajaühikus.
V=s/t
Kiirendus a, m/s2 – ühtlaselt muutuval liikumisel näitab, kui palju muutub keha kiirus
ajaühikus. A=v-v0 /t
Diferentsiaal – funktsiooni y=f(x) diferentsiaaliks kohal x nimetatakse funktsiooni, mis
avaldub korrutisena, mille tegurid on funktsiooni tuletis kohal x ja argumendi muut.
ehk
Tuletis – Kui eksisteerib piirväärtus
,siis nimetatakse seda funktsiooni y=f(x)
tuletiseks kohal x0 ning tähistatakse sümboliga
. Tuletise leidmist nimetatakse
funktsiooni diferentseerimiseks.
Integraal - funktsioonid
määramata integraaliks nimetatakse avaldist
, kus
on funktsiooni
mingi algfunktsioon ja
on
suvaline
konstant, ja seda tähistatakse nii:
Konstanti C nimetatakse integreerimiskonstandiks.
Integraal jaguneb määramata ja määratud integraaliks ( on antud raja tingimused).
Ühtlaselt muutuv kiikumine – on liikumine, mille puhul keha kiirus mistahes võrdsetes
ajavahemikes muutub võrdse suuruse võrra. Liikumisvõrrand x= x0 + v0t + at2/2 , milles nihe
s=v0t+ at2/2. Kui ülesande andmetes puudub aeg, kasutame valemit s= v2-v /2a. Täiesti vabalt
langevad kehad vaakumis.
Kõverjooneline liikumine – on punktmassi või jäiga keha või kehade süsteemi massikeskme
liikumine, mille korral
kiirusvektori siht muutub. Liikumine on kõverjooneline parajasti siis,
kui esine
b kiirendus, mille siht erineb
trajektoori puutuja sihist.
Kiiruse suund – kõverjoonelise trajektoori igas punktis ühtib keha liikumiskiiruse suund
sellest punktist tõmmatud puutuja suunaga (seda iseloomustatakse pöördenurgaga φ) ) φ=l/r
Nurkkiirus – on füüsikaline suurus, mis näitab raadiuse
pöördenurka ajaühiku kohta.
Tähis: ω (omega) Ühik: rad/s
(radiaani sekundis)
Põhivalem: ω = φ / t, kus φ (fii) on pöördenurk ja t
on aeg ω = 2πf f
Nurkkiirus ω on võrdeline sagedusega f, selle tõttu kutsutakse perioodilise liikumise
nurkkiirust ω ka nurksageduseks e
hk ringsageduseks.
Joonkiirus on füüsikaline suurus, mis näitab läbitud kaarepikkust ajaühiku kohta.
Tähis: ν Ühik: m/s
(meetrit sekundis)
Põhivalem: ν = φ * r, kus φ (fii
) on pöördenurk ja r
on trajektoori raadius.
Nurkkiiruse ja joonkiiruse vaheline seos:
R
t
R
t
l
v
. v=w*r – joonkiirus nurkiiruse
kaudu.
Kiirendus ühtlasel ringliikumisel: Ühtlasel ringliikumisel esineb kiirendus, mis on tingitud
mitte kiirusvektori mooduli vaid kiirusvektori suuna muutumisest. Kiirendusvektor on
suunatud ringjoone keskpunkti poole.
Normaal- ja tangentsiaalkiirendus kõverjoonelisel liikumisel.
׀v
׀≠const Normaalkiirendus an=v2/r Tangensiaalkiirendus at=v-v0/t
Aristotelese idee - Tunnistades mateeriat (aatomeid) kui sisu ja ideed kui vormi, keeldus ta
neid lahutamast. Aristotelese järgi sisaldub idee esemetes endis, ta ei saa eksisteerida
väljaspool mateeriat, ta on eesmärk, mille poole mateeria oma arengus püüdleb. Filosoofid
nimetavad sellist mõttekäiku teleoloogiaks.
Galilei idee – kõik mehaanikanähtused kulgevad erinevates inertsiaalsetes taustsüsteemides
ühtemoodi, mistõttu mehaanikakatsete abil pole võimalik kindlaks teha, kas antud
taustsüsteem on paigal või liigub ühtlaselt ja sirgjooneliselt.
Descartes’i idee – Mõtlen, järelikult olen. Inerts e I liikumisseadus.
Huygensi printsiip – keskkonna iga punkt, milleni võnkumine on jõudnud, on ise
elementaarlainete allikaks. Kõikide elementaarlainete mähispind on järgnevale ajahetkele
vastav uus lainefront.
Kepleri ideed - 1.Planeedi tiirlevad ümber Päikese mööda ellipsikujulisi trajektoore, mille
ühes fookuses asub Päike. 2. Tiirlemisel katab planeeti ja Päikest ühendav sirglõik. 3. Kahe
planeedi tiirlemisperioodide ruutude suhe on võrdne nende planeetide ja Päikese vaheliste
keskmiste kauguste kuupide suhtega.
Newtoni I seadus – Keha liigub ühtlaselt sirgjooneliselt või seisab paigal, kui talle mõjuvate
jõudude resultant võrdub nulliga.
Newtoni II seadus – kehale mõjuv resultantjõud on võrdne keha massi ja kiirenduse
korrutisega. F=ma
Newtoni III seadus – kaks keha mõjutavad teineteist jõududega, mis on suuruselt võrdsed ja
suunalt vastupidised. F1=-F2
Jõud ja tema seos kiirenduse ja impulsiga – ainepunkti impulsi tuletis aja järgi on võrdne
punktile mõjuvate jõudude resultandiga.
dt
dp
F
, kus p=mv. Mida suurem on kehale mõjuv
jõud, seda suurem on kiirendus.
Mehaanika põhivõrrand: F=ma ;
dt
dp
F
Resultantjõud ei ole mingi iseseisva jõu liik, vaid kõikide kehale mõjuvate jõudude summa.
Kui kehale mõjuvad jõud on samasihilised, siis saab summa leida omistades ühesuunalistele
jõududele plussmärgi ja vastassuunalistele miinusmärgi ( kahe jõu korral tuleb leida jõudude
vahe).
Vastastikmõju – 4 liiki
Gravitatsioon, Elektromagnetiline vastastikmõju, Nõrk
vastastikmõju, Tugev vastastikmõjuLiikumise diferentsiaalvõrrand ja selle lahendamine – =x(t)
z
y
x
z
y
x
t
F
z
m
z
y
x
z
y
x
t
F
y
m
z
y
x
z
y
x
t
F
x
m
z
y
x
,
,
;
,
,
;
,
,
;
,
,
;
,
,
;
,
,
;
F-
> a-> v-> x! (koordinaadi tuletis on kiirus, mille tuletis on kiirendus...integraal kiirendusest
kiirus jne)
Liikumisolekute samaväärsus –
Liikumise pööratavus ja determineeritus –
Gravitatsiooniseadus – kaks keha tõmbuvad teineteise poole jõuga, mis on võrdeline nende
massidega ja pöördvõrdeline nendevahelise kauguse ruuduga. F=G m1m2/r2 ; G=6,67*10-11
N*m2/kg2
Kepleri seadused – - 1.Planeedi tiirlevad ümber Päikese mööda ellipsikujulisi trajektoore,
mille ühes fookuses asub Päike. 2. Tiirlemisel katab planeeti ja Päikest ühendav sirglõik. 3.
Kahe planeedi tiirlemisperioodide ruutude suhe on võrdne nende planeetide ja Päikese
vaheliste keskmiste kauguste kuupide suhtega.
Raske ja inertne mass – Mass kui inertne mass väljendab keha inertsi ehk võimet säilitada
oma liikumise kiirust. Mass kui raske mass väljendab keha võimet tõmmata ligi teisi kehi ehk
gravitatsioonivõimet.
Raskusjõud on Maa (või mõne muu suure
taevakeha) poolt selle läheduses paiknevale palju
väiksemale
kehale avaldatav
gravitatsioonijõud. Raskusjõud Maa
gravitatsiooniväljas on
vektoriaalne suurus, mis avaldub
raskuskiirenduse (mis
võrdub gravitatsioonivälja
tugevusega) ja keha
massi m korrutisena:
.
Raskuskiirendus (
) on kiirendus, millega
vabalt langev keha kiireneb
taevakeha (planeedi,
tähe) poolt tekitatava
raskusjõu mõjul.
Keha kaal - kaal on jõud, millega keha raskusjõu toimel mõjutab alust või riputusvahendit
, kus P on kaal, m on keha
mass ja g
on raskuskiirendus.
Kiirendusega liikuva keha kaal:
, kus a on keha
kiirendus.
Keha on kaaluta olekus siis, kui tema kiirendus on võrdne gravitatsioonikiirendusega. Keha
kaal kaaluta olekus on 0.
Hõõrdejõud – esineb ühe keha liikumisel mööda teise keha pinda. F= μN Hõõrdejõu suund N Hõõrdejõu suund
on alati vastupidine liikumise suunaga. Max seisuhõõrdejõud on liugehõõrdejõust suurem.
Hõõrdetegur – näitab, kui suure osa moodustab pindade vahel toimiv hõõrdejõud Fh
pindu omavahel kokku suruvast jõust = Fh / Fn.
Seisuhõõrdejõud - ehk staatiline hõõrdejõud on suunatud vastu sellele liikumisele, mis peaks
tekkima ning on maksimaalne hetkel, kui kaks pinda hakkavad teineteise suhtes libisema.
Liugehõõrdejõud - nimetatakse hõõrdumist, mis tekib ühe keha libisemisel mööda teise keha
pinda jääva kiirusega ja on alati suunatud liikumisele vastu.
Takistusjõud- takistusjõud mõjub vedelikus või gaasis liikuvale kehale. Takistusjõud on alati
vastupidine liikumise suunale.
Takistusjõud sõltub keha liikumise kiirusest. Väikestel kiirustel on takistusjõud võrdne
kiirusega, suurtel kiirustel kiiruse ruuduga. Takistusjõud sõltub keha kujust ja keskkonna
viskoosusest.
Elastsusjõud on keha kuju ja mõõtmete muutmisel e
hk deformeerimisel tekkiv jõud. Kui
keha taastab oma kuju ja ruumala pärast deformeeruva jõu lakkamist nim. teda elastseks.
Hooke’ i seadus – Väikestel deformatsioonidel on elastsusjõud võrdeline keha
deformatsiooniga. F=kx. k-keha jäikus, x- deformatsioon(pikenemine, lühenemine).
Toereaktsioon N on elastsusjõud, mis mõjub pinnalpe toetuvale kehale, on alati risti
toetuspinnaga.
Mehaaniline pinge - δ=F/S on deformeeritud kehas tekkiv elastsusjõud keha ristlõike pindala
ühiku kohta.
Youngi moodul (elastsusmoodul) - Youngi moodul kirjeldab teoreetilist tõmbejõudu, mida
tuleks klaasile rakendada, et see painduks oma algupärase pikkusega samas suures ulatuses.
Moodul esitatakse jõuna pinnaühiku kohta.
Elastne nihke- ja väändedeformatsioon –
Toereaktsioon – on jõud, millega alus või riputusvahend mõjutab keha. Toereaktsioon mõjub
alati risti.
Impulss p , kg* m /s – on keha massi ja kiiruse korrutis. P=mv . Keha impulsi muut on
võrdne talle mõjuva jõu ja selle jõu mõjumise aja korrutisega. Delta p =Ft
Suletud süsteem tähendab siin süsteemi, mis ei ole vastastikuses mõjutuses süsteemiväliste
kehadega.
Impulsi jäävuse seadus – kui kehade süsteemile ei mõju väliseid jõude või see mõju
tasakaalustatakse, siis süsteemi koguimpulss on nende kehade igasugusel vastastikmõjul jääv.
m1v1+m2v2=m1v’1+m2v’2 1,2 kiirused enne vastastikmõju; 1’2’ kiirused pärast
vastastikmõju.
Absoluutselt mitteelastsete kehade põrkeks nimetatakse sellist
põrget, kus
kehad liiguvad
pärast põrget ühesuguse kiirusega, moodustades uue keha. Sellise põrke puhul kehtib ainult
impulsi jäävuse seadus.
Reaktiivliikumine on selline liikumine, mida põhjustab kehast eemale paiskuv keha osa. Kui
eemale lendava keha osa liikumissuund läbib keha massikeset, on reaktiivliikumine
kulgemine
Töö kui vektorite skalaarkorrutis:
Graafiline interpretatsioon – On tõestatud, et ka muutuva jõu korral on tehtav töö võrdne jõu
graafiku ja teepikkuse telje vahele jääva pindalaga.
Muutuva jõu puhul erineb ka tehtav töö. A=F*s
Teine kosmiline kiirus-tähendab seda, et keha lahkub Maa mõjupiirkonnast ja muutub
Päikese kaaslaseks
. Päikese-kesksele orbiidile jõudmiseks peab keha saama Maa pinnal
kiiruse 11,19 km/s maapinnal või 11,01 km/s 200 km kõrgusel.
Võimsus on füüsikaline suurus, mis näitab, kui palju
tööd mingi
jõud aja
ühiku
jooksul teeb,
ehk töö tegemise
kiirust.
Raskusjõu ja elastsusjõu töö – Raskusjõu töö
h
g
m
h
F
A
g
ei sõltu trajektoori
kujust, vaid kõrguste vahest h.
Elastsusjõu töö
2
2
l
k
A
, alati neg
Konservatiivsed ja mittekonservatiivsed jõud – Konservatiivseteks (mehaanilist energiat
säilitavateks) nimetatakse jõude, mille mõjumisel mehaanilise energia jäävuse seadus kehtib.
(gravitatsioon).
Mittekonservatiivsed nimetatakse jõude, mille mõjumisel see seadus ei kehti (mehaaniline
energia muutub soojuseks ja hajub laiali). Tuntuim dissipatiivne jõud on hõõrdejõud.
Hõõrde- ja takistusjõudude töö – Hõõrdejõu töö ,
s
N
A
kus μN Hõõrdejõu suund on hõõrdetegur, N
rõhumisjõud ehk normaaljõud pinnale. Hõõrdejõu töö on alati negatiivne, sest hõõrdejõud on
alati vastassuunaline liikumisele.
Takistusjõu töö: A=mgh-mv²/2
Energia on skalaarne füüsikaline suurus, mis iseloomustab
keha või jõu võimet teha
tööd.
Kineetiline energia on energia, mis on tingitud keha
liikumisest teiste kehade suhtes. Seda
tähistatakse enamasti Ek või T.
.
Potentsiaalne energia on süsteemi
energia, mis on tingitud keha asendist ja mõjust süsteemi
teiste kehade suhtes ja kõigi süsteemis olevatele kehadele vastastikku mõjuvatest
jõududest
välises jõuväljas. Seega võrdub süsteemi
potentsiaalne energia potentsiaalsete jõududega, mis
mõjuvad süsteemi kõigile osadele (nii välis kui sisejõud) süsteemi üleminekul vaadeldavast
(lähte) olukorrast ehk nõndanimetatud nullkonfiguratsioonist või nullnivoost.
Nullkonfiguratsioonis loetakse süsteemi potentsiaalne energia tinglikult nulliks. Nullpunkti
valik võib olla suvaline, tavaliselt võetakse maakera raskusjõuväljas selleks maapind.
Potentsiaalse energia tähiseks on Ep vahel ka Wp ja mõõühikuks
džaul (J).
Ülestõstetud keha Ep=mgh; Deformeeritud keha E= k x2/2
Ülestõstetud keha – Ep=mgh;
Deformeeritud keha – E= k x2/2
Liikuva keha energia – Ek = m v 2/2
Mehaaniliine koguenergia : E=Ep+Ek.
Mehaanilise energia jäävusseadus – kui kehale mõjuvad ainult raskus- ja elastsusjõud, on
keha mehaaniline koguenergia jääv. Ep1+Ek1=Ep2+Ek2 Mehaaniline koguenergia on jääv
näiteks vabal langemisel ja täielikult elastsel põrkel.
Välisjõudude töö ja süsteemi energia muut avatud süsteemis – U = Q + A Siseenergia
muut on võrdne süsteemile antud soojushulga ja välisjõudude poolt tehtava töö summaga
Jäävusseaduste rakendusi – vabalangus, elastne põrge, välistab igiliikuri.
Elastne põrge –
Liikumise suhtelisus – Et absoluutselt liikumatut taustsüsteemi ei ole olemas, siis on iga
mehaaniline liikumine suhteline.
Galilei relatiivsusprintsiip – mehaanilised protsessid kulgevad kõikides
inertsiaalsüsteemides ühesuguselt.
Inertsijõud mitteinertsiaalses taustsüsteemis – inertsijõud on mitteinertsiaalsetes
(kiirendusega liikuvates) süsteemides kehadele mõjuvad jõud, mis eksisteerivad ainult
mitteinertsiaalsüsteemiga seotud vaatleja seisukohalt ja mille ainsaks põhjuseks on inerts ehk
liikuva keha kiiruse jäävus väliste mõjude puudumise või kompenseerituse korral.
Coriolise jõud – on jõud, mis näivalt mõjub liikuvaile kehadele pöörlevas taustsüsteemis.
See tähendab, et Maa peal liikumise hetkel sirgjooneliselt kiirenduseta liikuvate objektide
trajektoorid on kõverjooned, kui nad kanda kaardile. Liikuv objekt hälbib põhjapoolkeral
paremale ja lõunapoolkeral vasakule. Piki ekvaatorit liikuvaile objektidele Coriolisi efekt
mõju ei avalda.
Keha kaal P, N – on jõud, mille keha mõjutab alust või riputusvahendit. Kui keha seisab
paigal või liigub ühtlaselt ja sirgjooneliselt, on kaal arvuliselt võrdne raskusjõuga.
Jõumoment M, N*m – on jõu ja tema õla korrutis. M=F l
Pöörlemisteljega keha tasakaalutingimus –
Inertsimoment - I näitab keha omadust säilitada oma pöörlemisolekut. Samas näitab ta ka
pöörleva keha osade massi jaotust pöörlemistelje suhtes. Keha element (pisike osa) massiga
m , asudes kaugusel r pöörlemisteljest, omab inertsimomenti I = m r 2.
Steineri lause – : See lause väidab: inertsimoment mistahes pöörlemistelje suhtes võrdub
inertsimomendiga C
I
raskuskest läbiv, pöörlemisteljega paralleelse telje suhtes, millele
on liidetud kahe massi korrutis raskuskeskme ja pöörlemistelje vahelise kauguse a
ruuduga:
2
a
m
I
I
C
Impulsimoment - (ehk pöörlemishulk) L näitab pöörleva keha osade impulsside mõju
pöörlemisele või siis pöörleva keha suutlikkust teisi kehi liikuma panna. Kui pöörleva
keha osa massiga m liigub joonkiirusega v piki ringjoont kaugusel r pöörlemisteljest,
siis tema impulsimoment on kauguse r ja impulsi p = m v korrutis: L = m v r
Pöörleva keha dünaamika põhivõrrand –
Impulsimomendi jäävuse seadus – välise jõumomendi puudumisel on keha impulsimoment
jääv. Jω =J’ω ’
Pöördliikumise ja kulgliikumise analoogia –
Kulgliikumine
Pöördliikumine
kiirendus
t
v
v
a
/
0
nurkkiirendus
t
/
0
läbitud tee ühtlaselt
muutuval liikumisel
2
/
2
0
at
t
v
s
pöördenurk ühtlaselt
muutuval pöörlemisel
2
/
2
0
t
t
dünaamika põhivõrrand
ma
F
dünaamika
põhivõrrand
J
M
kineetiline energia
2
/
2
mv
K
kineetiline energia
2
/
2
J
K
töö
Fs
A
töö
M
A
Rõhk paigalolevas ja liikuvas vedelikus (gaasis) – Staatiline rõhk on rõhk, mis
voolavas vedelikus või gaasis mõjub ühtlaselt igas suunas.Staatiline rõhk väheneb
voolikiiruse kasvades ja on pöördvõrdeline voolukiiruse ruuduga. Kirejeldab
potsensiaalset energiat
Dünaamiline rõhk on rõhk, mis tekib voolavas keskkonnas vooluse ja mingi keha
vastastikmõjus vooluse pidurdumise tulemusena. Dünaamiline rõhk kasvab võrdeliselt
voolukiiruse ruuduga. Kirjeldab kineetilist energiat. P=ρvv2/2
Pidevuse võrrand – on tegelikult voolava keskkonna mittekokkusurutavust väljendav
matemaatiline seos v S = const., mis väidab, et muutuva ristlõikega torus on voolava
mittekokkusurutava keskkonna puhul voolamise keskmise kiiruse ja toru ristlõikepindala
korrutis konstantne suurus.
Bernoulli võrrand - väidab, et voolavas keskkonnas on staatilise ja dünaamilise rõhu summa
konstantne suurus ega sõltu voolamise kiirusest.
Aerodünaamiline tõstejõud – Sisuliselt on tiiva kohal toimuv kirjeldatav järgmiselt: -
õhuvool tiiva kohal kiireneb, järgides Bernoulli seadust ning suunatakse tiiva poolt allapoole.
Seejuures tekib nii kiirenemise kui allapoole suunamise tagajärjel tiiva kohal alarõhk, mistõttu
tiiva all säilinud normaalne rõhk surub tiiba ülespoole. Tekkivat resultantjõudu nimetatakse
tõstejõuks.
Sisehõõrdejõud – vedeliku- või gaasikihte saab üksteise suhtes liikuma panna kui tahes
väikese jõu abil. Kuid niipea, kui üks vedeliku või gaasikiht hakkab teise suhtes liikuma
lõpliku kiirusega, tekivad nende kokkupuutepinnal tangentsiaaljõud, mis takistavad kihtide
liikumist teineteise suhtes. Neid jõude nimetatakse sisehõõrdejõududeks.
Viskoossus – on vedelike omadus takistada oma osakeste liikumist üksteise suhtes. See on ka
vedeliku sisehõõrde mõõt. Vedeliku viskoossus on sõltuv vedeliku temperatuurist ja rõhust.
Vedeliku temperatuuri suurenedes tema viskoossus väheneb ja rõhu suurenemisel viskoossus
suureneb. Viskoossust mõõdetakse viskosimeetriga. Mõõtühikuks on SI-s paskalsekund.
Laminaarne ja turbulentne voolamine –
Laminaarne voolamine on selline vedeliku voolamine, kus vedeliku osakestel on vaid
voolusuunaline kiirus. Et toru seintega kokku puutuvad vedeliku kihid on seinte poolt
pidurdatud, siis voolukiirus toru telje suunas suureneb ja on teljel maksimaalne.
Turbulentne voolamine ehk turbulents on selline vedeliku või gaasi voolamine, kus
aineosakesed liiguvad korrapäratult, tekitades sageli keeriseid, kuigi samal ajal liigub kogu
aine mass voolu suunas.
Reynoldsi arv – on dimensioonitu suhtarv vedelike mehaanikas. Arv saadakse
vedelikuosakesele mõjuva inertsjõu jagamisel kujumuutust takistavate jõududega. Reynoldsi
arvu valem: Re=VL/v, kus V on voolu kiirus, L on voolu iseloomustav pikkus ja v on voolu-
vedeliku kinemaatiline viskoossus.
Stokesi seadus – vedelikus liikuvale kuulikesele mõjub sisehõõrdejõud F, mis pidurdab tema
liikumist. Kui kuul liigub küllalt kaugele anuma seinast, siis on hõõrdejõu suurus määratud
Stokesi seadusega. F=6πf crv, kus r on kuuli raadius, v on kuuli kiirus ja c on sisehõõretegur.
Newtoni valem suurte kiiruste jaoks –
Võnkumine – on vahelduva suunaga liikumine tasakaaluasendi ümber. Vabavõnkumine tekib
pärast süsteemi tasakaaluasendist väljaviimist süsteemi ja sisemiste jõudude toimel.
Sundvõnkumine toimub perioodiliselt muutuva välisjõu mõjul. Vabavõnkumine on
energiakadude tõttu sumbuv.
Võnkumiste liigid – vabavõnkumine ja sundvõnkumine.
Periood T, s – on aeg, mis kulub võnkuval kehal ühe täisvõnke tegemiseks. T=t/N
Sagedus v , Hz – on võngete arv ajaühikus. V=1/T
Ringsagedus on võngete arv 2pii sekundis.
Harmoonilise võnkumise diferentsiaalvõrrand ja selle lahendamine – on füüsikalise
suuruse muutumine ajas siinusfunktsiooni järgi.
Vedrupendli ja matemaatilise pendli harmooniline võnkumine ja võnkeperiood –
Matemaatilise pendli väikese amplituudiga võnkumine ja vedrupendli võnkumine on
harmoonilised. vedrupendel
matemaatiline pendel
Sumbuv võnkumine - võnkumine, kus takistusjõudude tõttu võnkeamplituud aja jooksul
väheneb.
Hõõrde- või takistusjõu tõttu ei toimu võnkumine jääva amplituudiga. Amplituud ja
seega ka keha võnkumise energia kahaneb pidevalt (Joon. 35). Mõõtmised näitavad, et
amplituudi kahanemine on eksponentsiaalne, s.t. hälve muutub seaduspärasuse järgi
.
Sundvõnkumine –
Resonants – on sundvõnkumise amplituudi järsk suurenemine, kui välisjõu muutumise
sagedus ühtib süsteemi võnkesagedusega. Resonants avaldub paremini, kui energiakaod
süsteemis on väikesed.
Laine – on võnkumise edasikandumine ruumis. Laines toimub energia edasikandumine, kuid
ei toimu võnkuva keskkonna edasikandumist
Laine pikkus , m – on vähim kaugus kahe sünkroonselt võnkuva punkti vahel.
Seos kiiruse, lainepikkuse ja sageduse vahel: v=λ*f λ-lainepikkus
Lainete liigid: pikilaine (helilaine, vedelikes) , ristlaine( valgus, el.mag.laine)
Kiirus ja keskkonna elastsus – elastses keskkonnas lainena leviv mehaaniline võnkumine on
heli
Lainete difraktsioon – on lainete kõrvalekaldumine sirgjoonelisest levimisest. Difraktsioon
ilmsenb paremini väikeste tõkete ja avade korral. Difraktsioon on jälgitav interferentsipildi
kaudu.
Lainete interferents – on lainete liitumine, mille korral tekib ruumis võnkumiste püsiv jaotus
amplituudi järgi. Püsiv interferentsipilt tekib siis, kui vaadeldavasse piirkonda jõudnud lained
on koherentsed. Lainete koherentsus on tagatud siis, kui laineallikate sagedused on võrdsed ja
käiguvahe ei muutu.
Seisulaine seisev laine on laine, mille korral võnkumiste energia levikut ei toimu.
Doppleri efekt seisneb selles, et
lainepikkuse muutus on võrdeline
laineallika kiirusega
vaatleja suhtes. Doppleri efekti võib kogeda näiteks kui
rong mööda sõidab. Rongi poolt
tekitatava
heli kõrgus ehk
sagedus tõuseb kui rong sõidab meie suunas. Meist möödudes aga
helikõrgus langeb kiiresti. Veel ilmekamalt tuleb see esile
Vormel 1 puhul, näiteks
teleülekannete vahendusel.
Helilained – Kui õhus levivate elastsuslainete sagedus on vahemikus 20 kuni 20 000 Hz,
tekitavad nad inimese kõrva saabudes heliaistingu. Vastavalt sellele nim helilaineteks ehk
lihtsaks heliks igas keskkonnas levivaid elastsuslaineid, mille sagedus asub nimetatud
piirides.
Kuuldelävi – on minimaalne heli intensiivsus või -rõhk, mida tajutakse helina.
Helilainete intensiivsus- selle all mõistetakse laine poolt kaasaskantava energiavoo keskmist
tihedust.
Valulävi – heli intensiivsus või -rõhk, millest valjemate helide puhul tekib kõrvas valutunne
Heli intensiivsus ja valjus – L on heli intensiivsuse
I tajumise sõltuvus helikõrgusest
(helisagedusest).
Detsibell – on signaalide (võimsuse, voolu, pinge) suhteline logaritmiline mõõtühik. Üks
detsibell võrdub ühe kümnendiku belliga. Detsibell pole SI ühik.
Infraheli – on heli, milles rõhu muutumise sagedus on alla 20 Hz.
Ultraheli – on heli, mille võnkesagedus on üle 20000 Hz.
Soojusõpetus
Molekulaarfüüsika põhialused – 1. Kõik ained koosnevad osakestest (aatomitest või
nendest moodustunud molekulidest). 2. Osakesed on pidevas korrapäratus liikumises.
3. Osakeste vahel mõjuvad väikestel kaugustel nii tõmbe- kui ka tõukejõud.
Molekulide mass – Molekulmass on molekuli mass aatomi massiühikutes
Molekulide mõõtmed – Molekulide mõõtmed on suurusjärgus 10-7 – 10-8 cm
Molekulide vastastikmõju –
Molekulide paiknemine ja liikumise iseloom erinevates agregaatolekutes –
soojusliikumine on aineosakeste pidev korrapäratu liikumine.
1. Tahkes kehas võnguvad ümber tasakaaluasendi.
2. Vedelikus võnguvad ja siirduvad aeg-ajalt ühest tasakaaluasendist teise.
3. Gaasis liiguvad korrapäratult põrkudes üksteise ja anuma seintega.
Molekulaarfüüsika põhivõrrand – annab seose gaasi rõhu ja seda põhjustavate
mikroparameetrite vahel
p
nm v
nE
o
k
1
3
2
3
2
kus n on molekulide kontsentratsioon, m0
molekuli mass,
v
molekulide keskmine kiirus ja k
E
keskmine kineetiline energia.
Gaasi rõhu sõltuvus mikroparameetritest – gaasi rõhk on võrdeline molekulide keskmise
kineetilise energiaga. Täpsemalt p
nm v
nE
o
k
1
3
2
3
2
,
kus n on molekulide kontsentratsioon,
m0 molekuli mass, v molekulide keskmine kiirus, k
E
keskmine kineetiline energia.
Mikroparameetrid on seotud molekulide ja nende liikumisega. Nad eeldavad molekulide
olemasolu. Nad ei ole vahetult mõõdetavad, neid määratakse makroparameetrite kaudu.
(molekuli mass, keskmine kiirus, kontsentratsioon, keskmine impulss, kineetiline energia).
Kõik Mikroparameetrid iseloomustavad ainet molekulaarsena.
Absoluutne temperatuur ja tema seos keskmise kineetilise energiaga – absoluutne
temperatuur on võrdeline molekulide korrapäratu liikumise keskmise kineetilise energiaga.
Absoluutne temperatuur on temperatuur kelvinites. Absoluutsest temperatuurist madalamat
temperatuuri ei ole võimalik saada, sest molekulide kineetiline energia võrdub nulliga, siis
seda enam vähendada ei saa. Kelvini skaalas on nullpunktiks absoluutne null ja kraadi väärtus
on sama, mis Celsiuse skaalal. T=t+237,15 t=T-237,15
Molekulide kiirused – Molekulid liiguvad kaootiliselt ja kõikvõimalike kiirustega.
Molekulide jaotus kiiruse järgi –
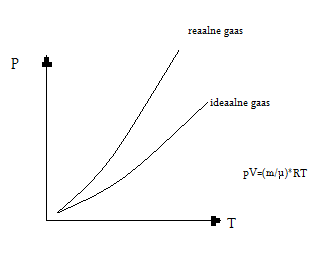
Ideaalse gaasi olekuvõrrand –
Ideaalse gaasi
olekuvõrrand
RT
M
m
pV
m – gaasi mass, M – gaasi molaarmass,
R – universaalne gaasikonstant
mol
K
J
R
31
,
8
const
T
V
p
T
V
p
2
2
2
1
1
1
p – gaasi rõhk, V – gaasi ruumala, T – gaasi temperatuur
p, V, T on gaasi olekuparameetrid
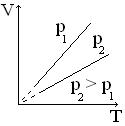
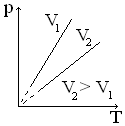
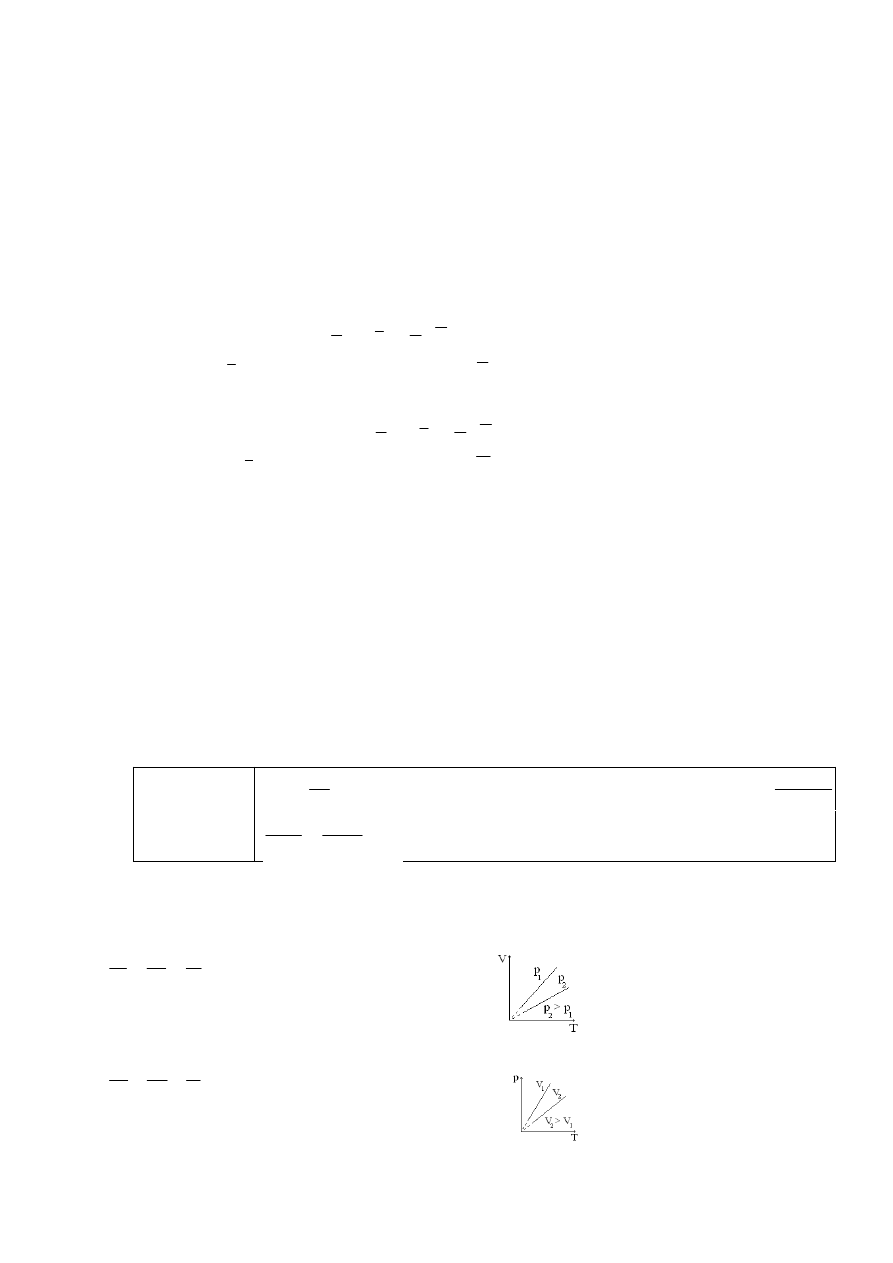
Isoprotsesside graafikud – isoprotsessid on jääva gaasikoguse (mass m)
üleminekuprotsessid ühest olekust teise, kui kolmest olekuparameetrist (p,V,T) üks ei muutu.
Järelikult on võimalik 3 isoprotsessi:
1. p=const ehk isobaariline protsess V=f(T) ehk Gay-Lussac’i seadus, mida kirjeldab seos
const
T
V
T
V
T
V
2
2
1
1
2. V= const ehk isohooriline protsess p=f(T) ehk
Charles’i seadus, mida
kirjeldab seos
const
T
p
T
p
T
p
2
2
1
1
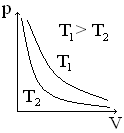
3. T=const ehk isotermiline protsess p=f(V) ehk Boyle’i – Marionette’i seadus, mida
kirjeldab seos
const
pV
V
p
V
p
2
2
1
1
Siseenergia – 1. makrokäsitluses keha või süsteemi energia, mis on määratud selle keha või
süsteemi võimega soojushulka üle kanda või mehaaniliselt tööd teha.
2. mikrokäsitluses keha molekulide kineetilise ja potentsiaalse energia summa. Ühikuks SI-s
on 1 J (džaul).
Töö gaasi paisumisel ja kokksurumisel – kulgliikumise töö valemid on lihtsalt
kohandatavad gaasi paisumisele. Lihtsamas katseseadmes – silindris liikuva kolvi korral – on
kus
, st. ruumala, mille võrra suurenes
või vähenes kolvi alla jääv ruum. Ruumala suurenemisele vastab
positiivne,
vähenemisele aga negatiivne väärtus. Paisumisel gaas teeb tööd, tema kokkusurumisel peab
aga keegi teine tööd tegema. Saadud valem eeldab, et gaasi rõhk jääb kogu paisumise vältel
konstantseks.
Energia jaotus vabadusastmete järgi – Vabadusastmete arv tähendab keha asendi
fikseerimiseks vajalike koordinaatide arvu.
Soojushulk – siseenergia hulka, mille keha saab või kaotab soojusülekande protsessis,
nimetatakse soojushulgaks. Keha kuumutamiseks vajalik (jahtumisel vabanev) soojushulk
sõltub selle keha ainest, massist ja temperatuuri muutumise ulatusest. Q=cm(t2-t1).
Erisoojus – näitab, kui mitme džauli või kalori võrra suureneb antud aine 1 kg siseenergia
selle aine soojendamisel 1 kraadi võrra. Vee erisoojus on teiste ainete erisoojustega võrreldes
suur.
Sulamissoojus – energia hulka, mis on vajalik 1 kg aine sulatamiseks sulamistemperatuuril,
nimetatakse selle aine sulamissoojuseks.
Aurustumissoojus – energia hulka, mis on vajalik 1 kg vedeliku aurustamiseks püsival
temperatuuril, nimetatakse aurustumissoojuseks. Aurustumissoojus näitab, kui palju suureneb
1 kg aine energia üleminekul vedelast olekust gaasilisse püsival temperatuuril.
Kütteväärtus – soojushulka, mis eraldub 1 kg kütuse täielikul ärapõlemisel, nimetatakse
kütuse kütteväärtuseks.
Soojusmahtuvus – keha soojusmahtuvuseks nimetatakse suuurst, mis võrdub soojushulgaga,
mille peame kehale andma, et tõsta tema temperatuuri ühe kraadi võrra.
Termodünaamika I seadus – süsteemile juurdeantav soojushulk Q kulub süsteemi
siseenergia ∆U suurendamiseks ja välisjõudude vastu tehtavaks tööks ehk paisumise tööks A,
st. Q=∆U + A
Avaldatakse ka kujul ∆U=A+Q, st. süsteemi siseenergia muut ∆U on võrdne välisjõudude töö
A ja süsteemile antud soojushulga Q summaga.
TD I seadus väljendab energia jäävuse seadust termodünaamikas.
Adiabaatiline protsess – on selline protsess, mille käigus ei toimu soojusvahetust
väliskeskkonnaga. ∆U=A
Termodünaamika II seadus – soojusülekanne ei saa iseenesest toimuda külmemalt kehalt
soojemale. Külma ja kuuma vee segust ei saa enam tagasi eraldada külma ja sooja vett.
Soojusprotsessidel on kindel suund.
Soojusmasina tsükkel ja kasutegur – siseenergiat mehaaniliseks energiaks muutvat seadet
nimetatakse soojusmasinaks. Soojusmasinas iseloomustab energia muundumist mehaaniline
töö.
Soojusmasin koosneb
soojendist (süsteemile siseenergiat andev keha),
jahutist (süsteemilt
siseenergiat saav keha) ja
töökehast (siseenergiat mehaaniliseks energiaks muutev keha).
Pärast töö sooritamist viiakse töökeha esialgsesse olekusse ja alustatakse kogu protsessi
uuesti. Töökeha sooritab protsesside tsükli ehk
ringprotsessi.
Soojusmasina
kasutegur näitab, kui suure osa juurdeantavast soojusenergiast Q1 muudab
masin kasulikuks tööks Akas . Kasulikuks tööks muutub süsteemile juurdeantava ja jahutile
äraantava soojushulga Q2 vahe: Akas = Q1 – Q2 . Kasuteguri väärtus antakse tavaliselt
protsentides ja selle saab leida järgmisest valemist:
Q
Q
Q
1
2
1
100%
Soojapumba efektiivsus – on seda suurem mida madalam on soojendatava aine temp.
Entroopia on ekstensiivne suurus, mis kirjeldab vaadeldava süsteemi erinevate võimalike
juhuslike ümberpaigutuste arvu.
Tõenäosus – sündmuse tõenäosus on arv, mis iseloomustab sündumse toimumise
võimalikkust teatud tingimustel. Suhteline sagedus näitab, kui suur on tõenäosus mingi
sündmuse toimumiseks. Tõenäosuse leiame, kui jagame soodsate (või oodatud) võimaluste
arvu kõikide võimaluste arvuga. Tõenäosust väljendatakse sageli protsentides.
Nernsti teoreem –
,
mida nimetatakse ka termodünaamika III printsiibiks.
Tänu Nernsti teoreemile on süsteemi entroopia arvutatav olekuparameetrite kaudu, mistõttu
(erinevalt teistest termodünaamilistest potentsiaalidest) on ta kasutatav olekufunktsioonina
(võib asendada oleku kirjeldamisel suvalist olekuparameetrit).
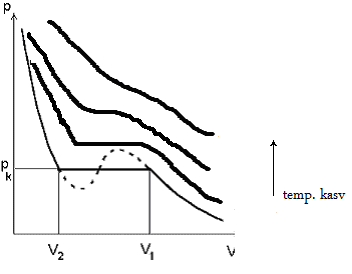
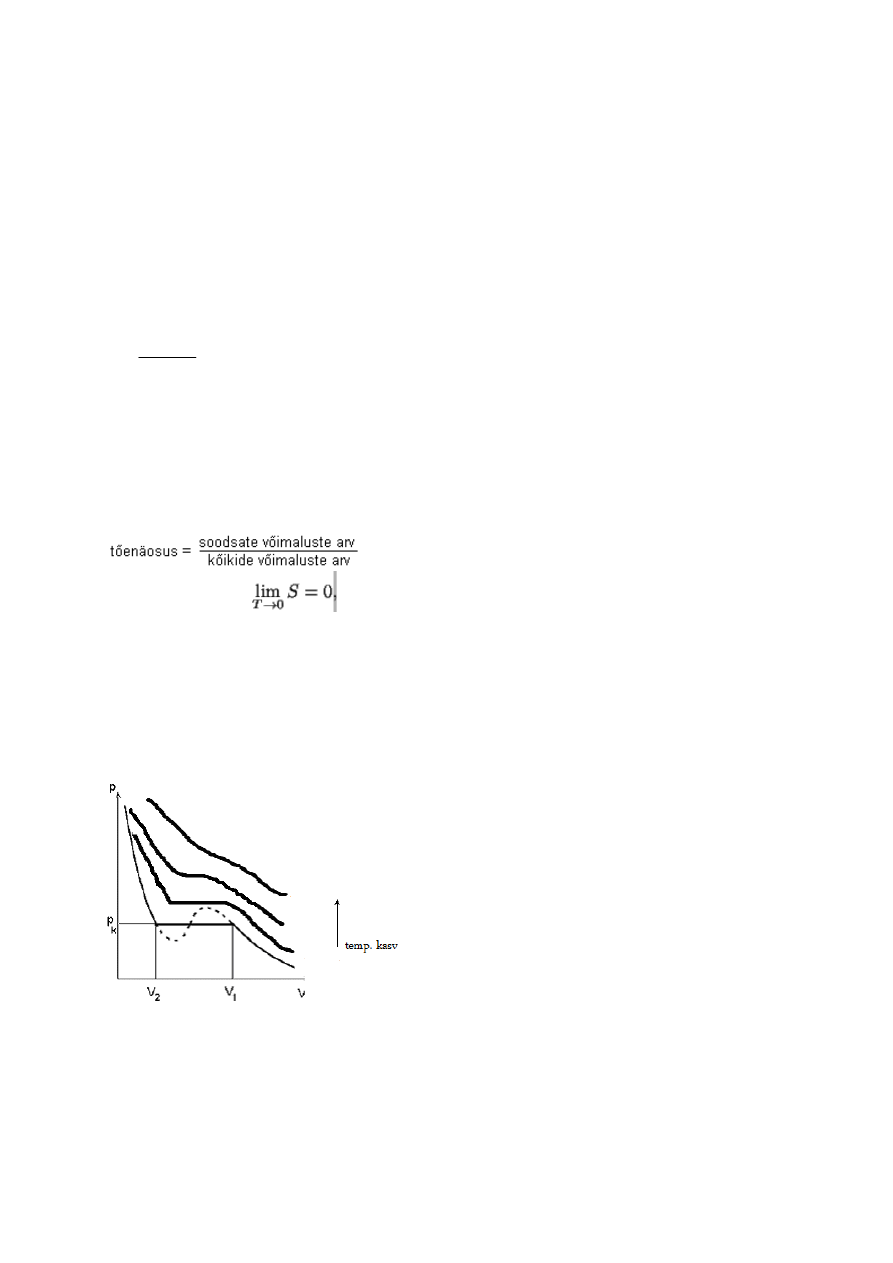
Reaalne gaas ja tema isoterm erinevad ideaalsest gaasist selle poolest, et nende molekule ei
käsitleta punktmassidena ja arvastatakse molekulide vahel mõjuvat tõmbejõudu.
Reaalse gaasi olekuvõrr: Konstant a iseloomustab molekulidevahelisi tõmbejõude ja b
molekulide ruumala.
Isoterm
Temperatuuri tõustes reaalse gaasi isotermi horisontaalne osa lüheneb.
Temperatuuri, mille korral isotermi horisontaalne osa kahaneb nulliks nimet. kriitiliseks
temperatuuriks.
Küllastunud aur – on oma vedelikuga tasakaalus olev aur. Küllastunud auru rõhk ei olene
ruumalast, vaid ainult temperatuurist. Küllastunud auruks nimetatakse auru, kus ajaühikus
vedeliku pinnaühikult lahkunud molekulide arv on võrdne ajaühikus pinnaühikule langenud
molekulide arvuga.
Kriitiline olek ja gaaside veeldamine –
Küllastunud auru sõltuvus temperatuurist – temperatuuri tõustes küllastunud auru rõhk
suureneb.
Keemine – on protsess, kus aurustumine toimub ka vedeliku sees olevates aurumullides ja
vedelik hakkab keema siis, kui küllastunud veeauru rõhk saab võrdseks õhurõhu ja
vedelikusamba rõhu summaga. Seega keemistemperatuur sõltub õhurõhust.
Õhuniiskus – on tingitud sellest, et õhus leidub alati veeauru.
Absoluutne õhuniiskus – nimetatakse veeauru massi ruumalaühikus õhus.
Relatiivne ehk suhteline õhuniiskus – antud temperatuuril õhus leiduva veeauru massi ja
samal temperatuuril teda küllastava veeauru massi suhe protsentides.
Kastepunkt – nimetatakse temperatuuri, mille juures õhus leiduv veeaur muutub küllastunuks.
Tekib kaste.
Vedelikud –
Vedeliku pinnakiht – pinnakihis on molekulidevahelised kaugused suuremad, st. vedeliku
pinnakiht on välja venitatud. Välja venitatud keha omab täiendavat potentsiaalset energiat.
Seda täiendavat potentsiaalset energiat, mida vedelik omab pinnakihis, nimetatakse
pinnaenergiaks.
Pindpinevus – tekib vedeliku sisejõudude toimel ning püüab vähendada vedelikuosakese
välispinda. Pindpinevusjõud on tingitud molekulide vahel mõjuvatest tõmbe- ja
tõukejõududest. Tõukejõud on väiksema mõjuraadiusega kui tõmbejõud ning seetõttu on
tõukejõud arvestatavad ainult naabermolekulide vahel.
Kapillaarsus – nähtus, kus vedelik pindpinevusjõu tõttu tõuseb või langeb peenikestes
torudes – kapillaarides. Kapillaarnähtuseks nimetatakse märgamisega seotud nähtusi peentes
torudes (märav aine tõuseb, mittemärgav langeb).
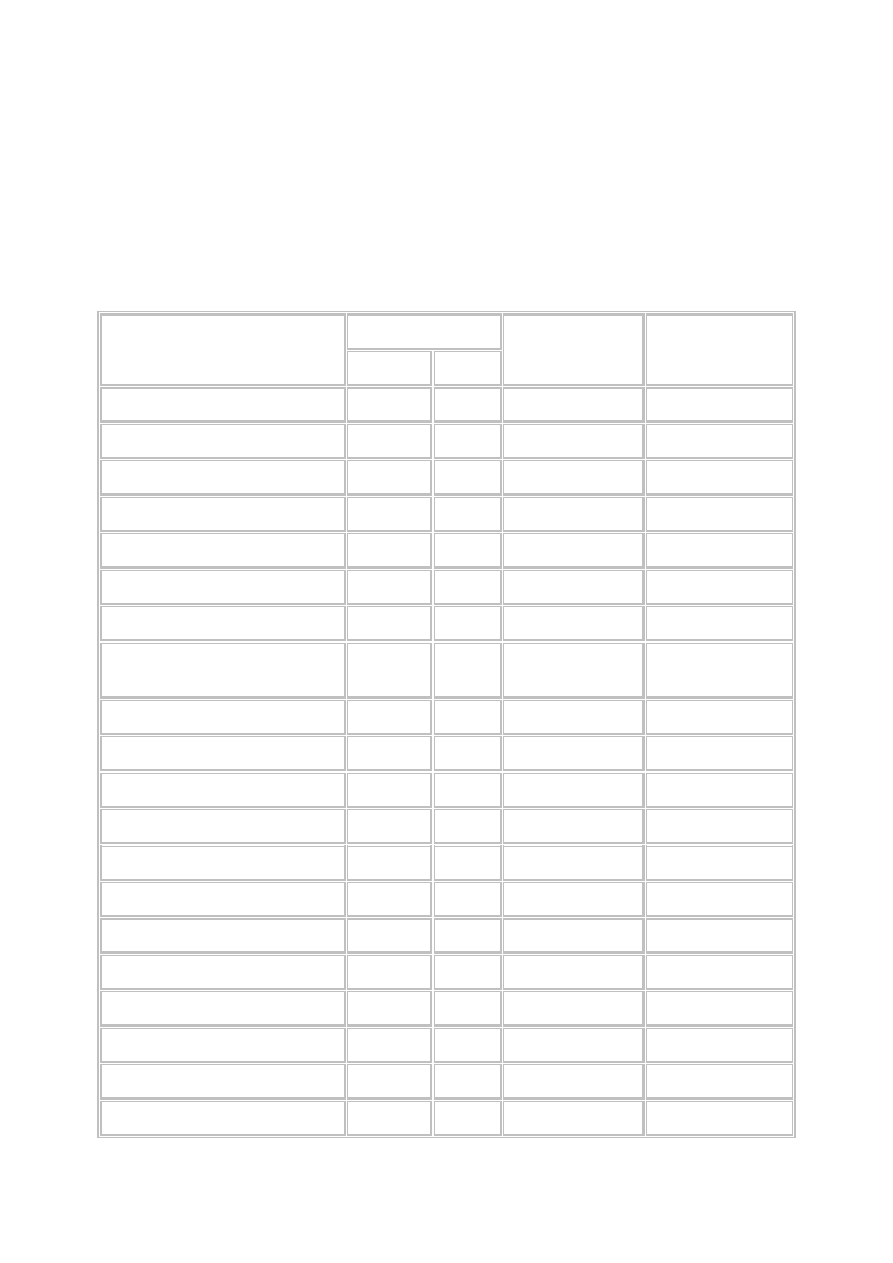
Tahkiste klassifikatsioon ja üldised omadused –
Tahkise tüüp
Omadused
Ioonkristall (NaCl, MgO, LiF,
jne.)
Kõrge sulamistemp, haprus
Aatomkristall (teemant, Ge,
Si, jne.)
Kõvad, jäigad, kõrge sulamistemp,
lahustumatud
Molekulkristall (jää, O2, CO2,
jne.)
Madal sulamistemp, haprad, tihti
kirstallilised
Metall (Cu, Al, Zn, jne.)
Juh. Elektrit, suur tihedus, sepist
atavad




























































Kõik kommentaarid