Arvutid I eksamiküsmused ja vastusedEksamikonspekt
2011
IABB22
1.
Loendurid [4]
2.
Pinumälu (stack)
realiseerimine ja kasutamine protsessoris[4]
3.
Trigerid[3]
4.
Dekooder [3]
5.
Käsuformaadid - 0, 1, 2, 3 ja 1,5
aadressiga arvutid[3]
6.
Summaator : järjestik, paralleel ja kiire ülekanne[3]
7.
Andmevahetusprotokollid: sünkroonne, asünkroonne jne[3]
8.
Registrid [2]
9.Mikroskeemide
valmistamise
tehnoloogiad [2]
10.
Konveier protsessoris ja mälus[2]
11.
Suvapöördusmälud[2]
12.
Adresseerimise viisid[2]
13.
Kuvarid [2]
14.
Andmeedastuse juhtimine
(bus
arbitation): süsteemid
katkestustega ja ilma,
prioriteedid [2]
15.
Multipleksor , demultipleksor[2]
16.
Spetsiaalse
riistvara realiseerimine[2]
17.
Alamprogrammide poole pöördumine[2]
18.
Vahemälu
( Cache ) organiseerimine :
otsevastavusega ,
assotsiatiivne ja kogumassotsiatiivne[2]
19.
Pooljuhtmälud[2]
20.
Mälude
klassifikatsioon [2]
21.
Käsu täitmine protsessoris[1]
22.
RISC ja
CISC protsessorid , mikroprogramm[1]
23.
Kombinatsioonskeemid ja järjestiskeemid[1]
24.
Analoog ja
digitaal info. Analoog
liides (DAC,ADC) [1]
25.
Aritmeetika-
loogika seade (ALU)[1]
26. Võrdlusskeem[1]
27.
Analoog ja digitaal info.
Helikaart [1]
28.
Siirete (
hargnemiste )
ennustamine ( Branch Prediction )[1]
29.
Katkestused arvutis
(Intrrupt)
[1]
30.
Protsessori üldstruktuur[1]
31.
Optilised mäluseadmed[1]
32.
Magnetmäluseadmed[1]
33.
Klaviatuur [1]
34.
Mälu
hierarhia arvutis[1]
35.
Mälu organiseerimine: koostamine mitmest
moodulist ja
vaheldamine
(Interleaving)[1]
36.
Printerid [1]
37.
Juhtautomaat : osa käsu täitmisel ja realiseerimine[1]
38.
Koodimuundur [1]
39.
Erineva pöördus viisiga mälud :
FILO ,
FIFO , assotsiatiivmälu, kahe
pordiga mälu[1]
40.
Puudutustundlik ekraan [1]
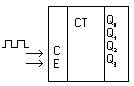
1.
Loendurid[4]
*Loenduriteks
nimetatakse impulsside loendamiseks ette nähtud
loogikaskeemi .
Loendureid kasutatakse nii automaatikaseadmetes kui ka
arvutustehnikas. Sisenditesse püütakse impulsid, väljundiks 0,1
kombinatsioonid. Erinevate väljundkombinatsioonide arvu nim.
mooduliks .
*
E sisend -
„
enable “ sisend, mis lubab loendamise.
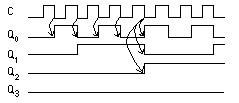
*Sõltuvalt
signaali
ülekandeviisist jaotatakse loendureid veel:
*Sünkroonne loendur
–
trigerite ümberlülitumine toimub samaaegselt ,
ümberlülitumisaeg on kogu aeg ühesugune. Kõik loenduris
sisalduvad trigerid on reguleeritud kellatakti järgi. Kasutatakse
alati seal, kus on vajalik täpne süstematiseeritus.
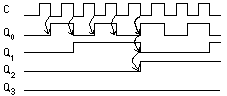
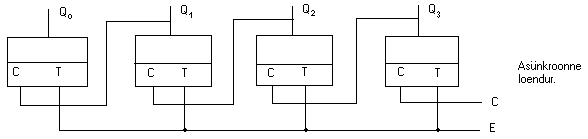
*
Asünkroonne
– trigerite ümberlülitusaeg pole siin
samasugune .
Sellie
loenduri puuduseks on signaalide ülekandmisel tekkiv hilinemine, mis
suureneb koos loenduri astmete arvuga. Hilistumine võib ületada
takti
kestvuse ja see on tõsiseks probleemiks. Kasut.
indikatsiooniseadmetes ja sagedusjagajates.
Mõnigaid
näiteid erinevatest loenduritest:*Kahendloendur
–
loendab järjestikulisi kahendkoode.
*Kümnendloendur
– loendab koode 0-9 ja
moodul on 10. See tähendab , et loenduril
on 10 erinevat kombinatsiooni, millega ta sissetulevale impulsijadale
vastab. Moodustatakse dekaadidest.
*Gray
koodi loendurid –
gray koodid on sellised kahendvektorid, kus iga järgnev kahendvektor
on eelmise kahendvektori lähisvektor. Kasulikkus seisnebki selles,
et alati muutub vaid üks kahendjärk ning tänu sellele ei teki
ealeski vahepealseid parasiitolekuid.
*Reversiivne
loendur
- Loendur, mis võimaldab loendada nii pos. kui ka neg. suunas.
Loendussuuna muutmine sõltub sellest, kas ülekandeks kasutatakse
trigeri otsest või inverteeritud signaali.
*Ringloendur
- Loendur,
mis on moodustatud nihkeregistrist, kui selle väljund ühendada
sisendiga.
*
Reaalses
elus
on võimalik projekteerida mistahes vajamineva mooduliga loendur,
luues iga loenduris sisalduva trigeri kõikide sisendite jaoks
tarvilik loogikfunktsioon.
2.
Pinumälu (stack) realiseerimine ja kasutamine protsessoris[4]
Pinumälu –
pinumälu baseerub
loogikal LIFO e. “last in,
first out”. See on
mälu poole pöördumise viis, kus
mälusse viimasena
kantud andmed peab sealt ka esimesena välja lugema (alles siis on
ligipääs järgmisele elemendile).
*Andmeid
„tõmmatakse“ pinumälust tüüpiliselt nö. „
PULL“
käsu abil, uusi andmeid „lükatakse“ aga
pinu otsa „
PUSH “
käsuga. Andmete
lugemiseks või kirjutamiseks läheb vaja vaid ühte kahendkujul
esinevat
viita , mis osutab „
pinu
tippule“–
seda viita nim.
pinuviidaks(
stack
pointer, SP)
.*Alan
Clementsi raamatus oli pinu rakendatud näiteks
suvapöördusmälus(
Tavaliselt
ongi pinumälu realiseeritud mingis sobivas suvapöördusmälu
piirkonnas),
postinkrementse- ning predekrementse adresseerimise baasil: enne
igat „
PUSH“
käsku pinuviita dekrementeeritakse ning peale igat „
PULL“
käsku seda inkrementeeritakse.
Selliselt saame olla kindlad, et
pinuviit
viitab alati pinu kõrgeimale elemendile. Näiteks:
MOVE (SP)
+, D3
„tõmbab“ pinu tipust ühe elemendi, inkrementeerib pinuviida
viitama järgmisele „kõrgeimale“ elemendile, ning tõstab
väärtuse andmeregistrisse
D3.*
Tüüpiline
pinul realiseeritud operatsioon protsessoris
- „tõmba“ pinu tipust „sõna 1“ ning „sõna 2“, saada
nad ALUsse, korruta nad omavahel, „lükka“ tulemus pinu otsa
tagasi.
(Piltlikult
võib pinumälu ette kujutada, kui suurt paberihunnikut, kuhu
aega-ajalt lisatakse uusi lehti ning vajadusel neid hunniku tipust
jällegi eemaldatakse. Kui vajame paberihunniku tipust lähtudes
3.ndat paberit, peame esmalt eemaldama temal lasuvad 2 paberit, et
vajamineva leheni pääseda).3.
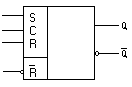
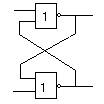
Trigerid[3]
* Triger -
on 1-bitise mäluga makro-
loogikaelement . Trigeri olek vastab tema
väljundsignaalile. Sõltuvalt sisendsignaalist säilitab triger
endise oleku või muudab seda vastupidiseks.
*
Trigeril
on
ehituslikult tavaliselt 2 väljundit: otsene
Q
ja invertne.
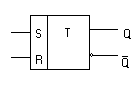
Tööpõhimõtte järgi jaotatakse trigerid:
a).seadesisenditega
ehk SR- trigeriteks
b).loendussisenditega
e. T-trigeriteks
c).andmesisenditega
ehk D-trigeriteks
d).universaalsisenditega
e. JK-trigeriteks.
*Eksisteerivad
nii ühe- kui ka kahetaktilised
(Master- slave )
trigerid.
*
Triger on suuremate mäluga loogikaskeemide (registrid, loendurid
jms. põhilisteks ehituskivideks.
*Informatsiooni
salvestusviisi järgi jagunevad trigerid 2-ks:
1)
asünkroonsed(latch)
- salvestatakse informatsiooni vahetult sisenditesse antud signaalide
põhjal.
2)
sünkroonsed( flip -flop)
– oleku reguleerimine sisendite baasil toimub vaid taktimpulsi
mõjul.
*Näide
trigeri realisatsioonist:RS
(
reset -set) ,
R
S
Qt
0
0
Qt-1
ei muutu
0
1
1
Set
1
0
0
reset
1
1
keelatud
NB!
Keelatud on anda mõlemasse sisendisse
signaal 1.
*a-sünkroonne * sünkroonne4.
Dekooder[3]
*
Dekooder
on
loogikaskeem , mis muundab etteantud sisendkoode neile vastavateks
väljundkoodideks. Sisuliselt võtab dekooder sisse kahendsõnumi,
desifreerib selle, ning annab konkreetsele sõnumile vastavasse
väljundisse (kõrge) signaali.
*
Tüüpilisel dekooderil
on
n sisendit ning
maksimaalselt
2n
väljundit
– võimalik on jätta mõni 2n
väljundist kasutamata.
*
Dekooderi abil saab kahendkoodi muundada koodiks, millega aktiveerida mälupesa,
juhtida segementindikaatorit jne.
*Sageli
kasutataksegi dekoodereid veel suvapöördusmäludes, tõlkimaks
siinilt saadud aadress lahti
kujule , mille järgi leida mäluväli,
mille poole pöörduti. Dekoodereid kasutatakse veel ka protsessori
sisemuses, kus nad dekodeerivad
käsuregistrist
saabunud käsukoode ning edastavad neid juhtautomaadile.
*Kõige
levinumalt koosnevad dekooderid AND loogikaelementidest.
*Suure
sisendite arvu korral kasutatakse dekodeerimsieks kaskaadlülitust,
kus esimese astme dekooder aktiveerib ühe teise astme dekooderi ning
see alles omakorda ühe väljundi.
5.
Käsuformaadid - 0, 1, 2, 3 ja 1,5 aadressiga arvutid[3]
* Protsessorite käsusüsteeme
võrreldakse sageli selle järgi, kui mitu operandi on käskluses
täpsustatud. Käsusüsteeme võib seega käsuformaadi põhjal
jagada:
a).
0-aadressiga
arvuti: 0-aadressiga
arvutis ei täpsustata operandi asukohta, kuna selle asukoht on
kindlalt paigas. 0-aadressiga arvutid on üldjuhul realiseeritud
pinul – näiteks käsk
ADD
“
tõmbaks“ pinu tipust 2 esimest operandi, liidaks nad kokku ning
„lükkaks“ tulemuse tagasi pinu otsa. Puhtalt 0-aadressi
masinad pole väga
laias kasutuses.
b).
1-aadressiga
arvuti: 1-aadressiga
arvuti täpsustab käsus vaid ühe operandi.
*Käsk koosneb:
käsukood + 1 op. aadress.
Käsu teine operand on
tavaliselt eeldefineeritud asukohaga
akumulaator , mida ei pea eradi ära näitama.
1-aadressiga
arvuteid kasutatakse siiani laialdaselt vähem-hinnalistes
kontrollerites ja süsteemides nagu näiteks mänguasjad jms.
*
Näiteid:
LDA
P,
ADD
Q. c).
1,5-aadressiga arvuti:
1,5 aadressiga arvutis täspsutatakse 1 „pikk“ operand, 1
„lühike“ operand.
*Käsk
koosneb: käsukood
+ 1 op. pikk aadress + resultaadi lühike aadress.
(Lühike aadress
saab viidata vaid protsessori mäluregistrile). d).
2-aadressiga
arvuti: 2-aadressiga
arvuti
defineerib käsus 2 erinevat operandi.
*Käsk koosneb:
käsukood + 1 op. pikk aadress + 2. op. pikk aadress.
2-aadressiga arvutis
täidetakse etteantud operandidega käsk ning salvestatakse tulemus
esimese operandi
aadressile . Moodsates protsessorites enimlevinud
käsuformaat.
*Näiteid:ADD
D0, D1; SUB P,D2. e).3-aadressiga
arvuti: 3-aadressiga
arvuti defineerib käsus 3 operandi.
Käsk
koosneb: käsukood
+ 1. op. pikk aadress + 2. op. pikk aadress + resultaadi pikk aadress.
On küll selles mõttes
efektiivsem, et andmeid ei tule tehte sooritamisel üle kirjutada,
ent siiski ei ole väga laias kasutuses.
*Näiteid:
ADD
D0,D1, D2.6.
Summaatorid- järjestik, paralleel- ja kiire ülekanne[3]*Summaator
on kombinatsioonskem, mis liidab arvkoode. Iga järk summeeritakse
eraldi, lisaks sisendite väärtustele arvestatakse ka noorematest
järkudest tulevaid ülekandeid.
*Elektroonikas
eristatakse
täissummaatorit
ning
poolsummaatorit:
a).Täissummaator
arvestab ka ülekandega vanemasse järku.
b).
Poolsummaator ülekandega vanemasse järku ei arvesta.
*
Lahutaja (subtractor):
Lahutamine realiseeritakse täiendkoodi
liitmine abil. (Täiendkood
on pöördkood, selle viimasesse järku liidetakse 1).
Liitja-lahutaja
–lisasisendiga on võimalik määrata teostatavat operatsiooni,
vastavalt otsusele valitakse liidetava/lahutatava operandi kood või
täiendkood.
*Järjestikülekande
puhul on jadamisi ühendatud mitu 1-bitist täissumaatorit, selline
lahendus on aeglane kuna iga järk peab ootama eelmise järgu
ülekannet.
*Paralleelülekande
puhul on võimalik vältida pikka viiteaega, ei pea ootama kuni
ülekanne levib mööda järke ning tänu sellele saab realiseerida
võimsamaid summaatoreid – võtab aga realiseerimiseks äärmiselt
palju kristallipinda.
*Kiire
ülekanne( Look ahead carry generator)*Summaatori tehted :A
® B ® C = summa
A&B+A&C+B&C
= ülekanne
7.
Andmevahetusprotokollid: sünkroonne ja asünkroonne[3]*Sünkroonne siin-
Sünkroonnse
siini puhul reguleerib kell, millal andmeid loetakse. Heaks küljeks
on see, et andmete vahetuseks on üks kindel, kellast sõltuv
standard. Miinuseks on see, et kõik siiniga ühendatud
seaded peab
töötama samal taktsagedusel -
aeglus .
*Asünkroonne siin-
Ei
ole
otseselt
kellaga reguleeritud, plussiks on see, et siiniga ühendatud seaded
ei pea töötama täpselt sama tatsageduse juures. Asünkroonnse
siini puhul on aga kriitiliselt tähtis nö. kätlemise(
handshaking)
kasutamine.
*Tagasisideta siin-
(a)Andmed
saavad edastamiseks valmis. (b)
Saadetakse välja DataValid signaal.
(c)Seade/funktsionaalne üksus võtab andmed siinilt vastu.
(d)DataValid signaal läheb madalaks. (e)Andmed kaovad siinilt.
* Tagasisidega siin-(a)Andmed
saavad edastamiseks valmis. (b)Saadetakse välja DataValid signaal.
(c)Sisend/väljundseade
saadab protsessorile vastu DataAccepted
signaali ning kopeerib siinilt andmed. (d)DataValid ning DataAccepted
signaal lähevad madalaks ning andmed kaovad siinilt. Sellist nähtust
nimetatakse ka
handshaking’uks.
*Täieliku
tagasisidega siin- (a)Andmed
saavad edastamiseks valmis. (b)Saadetakse välja DataValid signaal.
(c)Sisend/väljundseade saadab protsessorile vastu DataAccepeted
signaali ning kopeerib siinilt admed. (d)DataValid signaal läheb
madalaks. (e)DataAccepted signaal läheb madalaks johtuvalt
DataValidi madalaks minekust. (
Täieliku
tagasisidega siin töötab kindla järjekorra alusel)*Grupi andmeedastus (Burst
mode)-
Antakse
count e.
tsüklite arv, mis tuleks läbi viia ning esimene aadress. Ülejäänud
andmeid hakatakse võtma esimesele järgnevatelt aadressidelt.
*Andmeedastus
konveierina- uus
mäluaadress pannakse aadressisiinile enne, kui eelmise andmed on
kohal.
8.
Registrid[2]*Registriteks nim.
trigeritest koosnevat
seadet , mis võimaldab salvestada , säilitada
ning taasesitada infot ühe sõna kaupa. Lisaks nihutatakse registri
abil infosõna
bitte vasakule või paremale.
*Enim on levinud
8-,
16-, 24-, ja 32- bitised registrid, mis vastavad sõnapikkusele 1, 2,
3 ja 4
baiti .
*Registrit
juhitakse
signaalidega: vastuvõtt (write) ja 0-seade (reset). Signaalidega
write
kirjutatakse sisendite Aº…An
informatsioon registrisse, signaaliga reset aga kustutatakse sealt.
*Nihkreregistrid
on registrid, kus info sistamine ja väljastamine toimub järjestikku.
Nihkeregistrites ühendatakse trigeri otsene ja invertne väljund
järgmise trigeri vastavatesse sisenditesse. Seega toimub iga kella
taktkiga infosõna nihutamine ühe biti võrra.
*Sõltuvalt
nihkeregistri realisatsioonist
on võimalik infosõnaga
sooritada a).aritmeetilist
nihet,
b).loogilist nihet
ning
c).ringnihet.
*
Reverssiivne
nihkeregister
võimaldab kahesuunalist nihet.
*Registrid on
arvuti
ehituses äärmiselt tähtsad, kuna protsessoris toimub kogu vahetu
info töötlemine just andmeregistrite abil (andmeid tõstetakse
töölemiseks mälust andmeregistritesse ning sealt jälle tagasi
mällu). Samuti on arvuti suvapöördusmälu jämetates joontes
lihtsalt üks väga suur
registrite massiiv .
9.
Mikroskeemide valmsitamise tehnoloogiad[2]*Bipolaarsed
tehnoloogiad – vanemad
tehnoloogiad, mida niivõrd palju enam ei kasutata.
Kasutab
küll vähe pinda, ent bipolaarsete tehnoloogiatega kaasnevad nivoode
korrektsiooni-probleemid. Näiteid:
DTL-(
Diood transistor
loogika)- Sisendid tulevad sisse dioodloogikast koosnevasse skeemi,
edasi lähevad väljundid nivoosid taastavasse elementi.
TTL-
(
Transistor-transistor
loogika)- Revolutsioonile
tehnoloogia , sellest alates hakati
massiliselt kasutama mikroskeeme.
STTL-
(
Shotky
transistor-transistor
loogika) – muutis elemendid kiiremaks, kuna lisatud oli Shotky
diood, ei lasknud enam liigset voolu juhti.
Veel
eksisteerib näiteks
ECL,IIL;* Pooljuhtide tehnoloogia(
Metal Oxide Semiconductor )
– valitsev tehnoloogia, mida kasutatakse moodsas arvutitehnikas.
Näited:
*
nMOS
– loogikaelemente realiseeritakse n-channel
MOSFET ’e kasutades,
järgnes kronoloogiliselt pMOSi trendile ning eelnes CMOSi
trendidele.
*
pMOS
– loogikaelemente realiseeritaske p-channel MOSFET’e kasutades.
pMOS’i loogikas on
skeeme lihtne kujundada ning toota, ent nad on
ebaefektiivsed ning aeglased.
* CMOS
– nimi tuleneb sellest, et kasutatakse sümmeetrilisi p- ja n-
tüüpi MOSFET’e loogikaelementide realiseerimiseks. CMOS
tehnoloogiad on valitsevad tehnoloogiad, kuna nende elektritarve on
üldjuhul väiksem(ainult lülituse hetkel) ning nende
pakkimistihedus on äärmiselt suur. Suure taktsageduse juures
vajavad korralikku jahutussüsteemi.
10.
Konveier protsessoris ja mälus[2]Käsu
täitmise protsessoris võib jagada teatud sõltumatuteks etappideks.
Näiteks on siin käsk jagatud
neljaks etapiks:
1)
IF Instruction Fetch + Instruction Decode(Käsu
laadimine ja
dekodeerimine)
2)
OF Operand Fetch (Operandi laadimine)
3)
OE Operand Execute ( Operatsioni täitmine ALU-s)
4)
OS Operand Store ( Resutaadi salvestamine)
Programmi
täitmine ilma konveierita:*
Selgub ,
et iga etapi täitmisel on rakendatud vaid 25% täielikust
potentsiaaist. Käskude täitmise
efektiivsust aitab siinkohal
oluliselt tõsta RISCi ideoloogia poolt arvutitehnikasse toodud
konveierprotsess.*Eelnevale
näitele vastandudes oletame nüüd, et kõik neli käsutäitmise
etappi oleksid sõltumatud ning umbes sama kestvusega. Sellisel juhul
saaksime esimese käsu esimese etapi täitumisel hakata täitma teise
käsu esimest etappi jne. Selliselt jätkates on meil sisuliselt
võimalik täita 4 käsku 1 käsu täitmise
ajaga ning protsessori
efektiivsust tõsta 4-kordseks. *
Ehkki ei tõuse ühe käsu täitmise
absoluutne kiirus, tõuseb käskude täitmise kiirus ajaühiku kohta
kordades. Analoogina võime vaadelda konveieri tööd tootmises.
*Konveierprotsessi
rakendamise suurimaks
miinuseks
on komplikatsioonid, mis kaasnevad siirdekäskudega (
Branch bubbles )
ning andmesõltuvusega (
data
dependancy).
Konveieriga
programmi täitmine ( Pipeline ):11.
Suvapöördusmälud[2]*Suvapöördusmälu( Random access memory )-
iga sõna poole pöördumine nõuab ühepalju aega sõltumatta tema
asukohast mälus.
*Suvapöördusmälud
e. muutmälud on toitepingest sõltuvad ning jagunevad kahte liiki:
staatilisteks ja dünaamilisteks.
*
Staatilises
muutmälus
kasutatakse iga infobiti salvestamiseks ühte trigerit, mis säilitab
infot seni, kuni säilib
toitepinge . Kuna staatilises mälus säilib
salvestatud informatsioon ka pärast mälust lugemist, püsides seal
toitepinge olemasolu korral kui tahes kaua, siis nimetatakse
niisugust mälu staatiliseks.
*Mälu
juhtimimiseks kasutatavad reziimid:
R/W
=
1, (
read/write)
määrab ära lugemisrežiimi;
R/W
=
0, määrab ära kirjutusrežiimi;
CS
=
1, (
chip select )
lubab mälukiibist bitte lugeda või sellesse kirjutada;
CS
=
0, mäluelement on süsteemi tööst välja lülitatud ning ei
reageeri signaalile R/W;
*Dünaamilises
muutmälus
säilib info
MOSFET-transistoride
lekkevoolu tõttu väga lühikest aega. Seepärast tuleb info
säilitamiseks laengut perioodiliselt näiteks iga 2 ms järel
uuendada (regenereerida). Dünaamiline muutmälu on staatilise mäluga
võrreldes lihtsama ehitusega (ühe biti salvestamiseks läheb vaja
umbes kaks korda vähem elemente), ta on
aeglasem , ent tarvitab tööks
vähem energiat.
12.
Adresseerimise viisid[2]1.
Vahetu
adresseerimine
– operand ise sisaldabki operandi otsest väärtust(nt.
hex-number),
ei
viidata
mälu- ega registrioasukohale. nt:
ADD
#12, D0. (st.
programmi on konstant sisse kirjutatud).2.
Otsene
adresseerimine
–
operandid viitavad mälu või registri asukohtadele, kus admed
asuvad. nt
:
ADD
D1 ,D0.3.
Kaudne
adresseerimine
– käsukoodis on operandiks aadressi aadress: esmalt loetakse
operandi poolt määratud aadressilt sisse andmete aadress ning alles
seejärel saadakse reaalne ligipääs andmetele enesele. nt:
MOVE
(A0), D0.4.
Autoinkrementne
adresseerimine
– Pärast aadressiregistri kasutamist inkremeteeritakse tema
väärtus automaatselt edasi/
suuremaks ühe mäluauskoha
võrra.
(postincrementing).nt:
ADD.B
(A0)+,D0.5.
Autodekrementne
adresseerimine –Enne
aadressiregistri kasutamist dekrementeeritakse tema väärtus
automaatselt tagasi/väikesemaks ühe mäluauskoha
võrra.
(predecrementing).nt:
ADD.B -(A0),D0.6.
Segmenteerimine
– käsus sisalduv operand sisaldab väärtust, mis määrab ära
konkreetse segmendi, kus andmed asuvad ning defineerib ka nö.
offseti
ehk selle, kui mitmenda segmenti elemendi poole pöörduti.
7.
Suhteline
adresseerimine–
võimaldab kirjutada positsioonivaba süntaksit, st.rakendamata
vahetut adresseerimist. Adresseerimisel liidetakse nihkeks
käsuloendurile mingi väärtus.
nt:
Value1(PC),A0.*Veel
eksisteerivad:
indekseerimisega
adresseerimine, baseerimisega adresseerimine, adresseerimine
baseerimisega ning indekseerimisega.13.
Kuvarid[2]*CRT
(
Cathode
Ray
Tube)
kuvar-
Kuvari
tüüp, mille puhul pilt tekitatakse
elektronkiiretoru ekraanile sarnaselt televiisoriga. Elektronkiiretoru kujutab endast suurt
klaasist vaakumlampi, mille ekraani osa siseküljele on kantud kolme
värvi luminofoorist (punane, roheline ja sinine) koosnevad punktid.
CRT
tööpõhimõte:a).Esmalt
kuumutatakse CRT tagaotsas asuvat küttekeha- see tõstab katoodi
temperatuuri. Katood ise on kaetud ainega, mis kõrgetel
temperatuuridel emiteerib elektrone.
b).
Elektronkiiretoru eesotsas tekitatud kõrgepinge toimel hakkavad
elektronid liikuma ekraani suunas. Fokusseerivad
plaadid koondavad
elektronide voo ühtlaseks
kiireks .
d).
Fokuseeritud elektronide
kiirt juhitakse kallutusmähise abil
vajaliku punktini
ekraanil .
d).Ekraan
on kaetud luminofooriga, mis hakkab helendama
elektronkiire toimel.
Mida intensiivsem elektronide voog, seda heledam luminofoor.
*Vedelkristall
(Liquid
Crystal
Display)
kuvar- LCD
kuvarid on üldiselt kahel põhimõttel:
nemaatilised
ning
twisted
effektil
põhinevad.
LCD
kuvari tööpõhimõte: a).
Kuvari vedelkristalli paneeli taga on
valgusallikas . Enne paneeli
asetseb
esimene
filter,
mis
laseb läbi valgust 0 kraadise polarisatsiooniga. Paneeli taga on
aga
teine
filter,
mis laseb läbi ainult 90 kraadise polarisatsiooniga vagust.
b).
Kui
vedelkristalli
ei mõjutata polariseeriva
pingega, ei läbi valgus teist
filtrit . Mõjutades vedelkristalli
polariseeriva
pingega,
muutub aga ka valguse polaarsus peale kristalli läbimist
ja
ta läbib ka teise filtri.LCD
kuvarid on viimastel aastatel hakanud laialdaselt välja vahetama CRT
kuvareid.
Nende
nõrkadeks külgedeks on aeglus, ebaselge kujund ning vajalik täpne
vaatenurk, ent plussideks on nende vähene energiatarve .Orgaanilised
kuvarid- võimalik
tulevikutehnoloogia.
Plussid:
väike voolutarve, painduvad paberipaksused
ahelad - valmistatakse
kilele mitte klaasile.
Miinused:
aeglased, tundlikud kõrgetele temperatuuridele, ei kannata kõrget
pinget.
14.
Andmeedastuse juhtimine(bus arbitration ):
süsteemid katkestusega ja ilma, prioriteedid[2]*Andmeedastuse
juhtimine(bus
arbitation)-
Andmeedastuse
juhtimise eesmärgiks on maksimaalselt efektiivne arvuti andmesiinide
kasutamine ning nende otstarbekas jagamine kõigi arvuti
funktsionaalsete komponentide vahel. Andmeedastuse juhtimise
realiseerimiseks on mitmeid erinevaid
teooriaid ning
meetodeid :
*Passiivne andmevahetus - Passiivse
andmevahetuse puhul ei toimu I/O seadmete ning protsessori vahel
mingit erilist suhtlust (I/O
seadmed ei nõua ise tähelepanu) ning
prioriteetide probleem on
lahendatud korrapäraselt multiplexori
abil.
*Katkestusega
süsteemid- Katkestusega
süsteemi puhul on kõik arvuti riistvaralised komponendid on
ühendatud
protsessoriga läbi
spetsiaalse siini
IRQ(
Interrupt
Request),
tänu millele neil on vajadusel võimalik nõuda protsessori
tähelepanu.
Katkestuse
toimumisel:
(a)Lõpetab
protsessor parasjagu
poolelioleva operatsiooni.(ALATI
lõpetatakse pooleliolev operatsioon ning alles siis tegeletakse
katkestusega).
(b)Käsuloenduri(
PC)
ning lipude registri väärtused lükatakse pinu otsa.
(c)CPU
lahendab katkestuse tekkepõhjuse, kasutades rakendust nimega
interrupt
handler’it.
(d)Pinu
otsa salvestatud väärtused taastatakse ning protsessori töö
jätkub.
*Prioriteetide
lahendamine ning reguleerimine katkestusega süsteemis: *Daisy chain
– prioriteedid siinile pääsemiseks on paika pandud
riistvaraliselt (jäigalt) füüsilise asetusega. Seega saab
protsessori tähelepanu tavaliselt esimesena see seade, mis asub
andmevahetust juhtivale skeemile kõige lähemal.
*Kontrolleriga
määratavad probleemid - kõik
(I/O seadmed/muud
funktsionaalsed komponendid) on iseseisvalt
ühendatud ühe
tsentraalse katkestusi töötleva kontrolleriga.
Kontroller on omakorda ühendatud protsessoriga ning
vastavalt
tema otsustele saavad
I/O seadmed protsessori tähelepanu.
*
Kolmandaks võimaluseks on
programmselt
määratud prioriteedid.
15.
Multipleksor, Demultipleksor[2]*Multipleksor(MUX)-
multipleksor
on digitaalskeemides kasutatav kommutatsioonielement. Multipleksoril
on harilikult
2n
andmesisendit,
n
kontrollsisendit ning üksainus väljund. Vastavalt juhtsignaalile
kommuteeritakse multipleksori väljundisse signaal ühest
infosisendist. Järelikult saab kahe juhtsisendiga ehk kahebitise
koodiga kommuteerida 4 sisendit, kolme juhtsisendiga 8 sisendit jne.
Piisava arvu
sisenditega multipleksori abil saab realiseerida
suvalisi loogikafunktsioone.
*Demultipleksor( DeMUX )
on kommutaator, millel on üks infosisend ja mitu väljundit.
Juhtsisendite arv sõltub väljundite arvust ja vastupidi. Vastavalt
juhtsignaalile kommuteeritakse infosisendi signaal ühte väljundisse.
Väljundite arv on
2n,
kus
n
on juhtsisendite arv. Järelikult saab kahe juhtsisendiga ehk
kahebitise koodiga kommuteerida 4 sisendit, kolme juhtsisendiga 8
sisendit jne.
16.
Spetsiaalse riistvara realiseerimine[2]*Spetisaalse riistvara
realiseerimiseks on tohutu hulk erinvaid võimalusi:
a).
Programne realisatsioon (universaalarvuti baasil) – Universaalarvuti
baasil spetsiaalse riistvara reaiseerimiseks ühendame me oma
personaalarvuti paralleelpord külge juhitava seadme ning
kirjutame programmi juhtalgoritmi täitmiseks. (
Programne
on realisatsioon selles mõttes, et juhtalgoritm on realiseeritud
arvuti mälus säilitatava programmina, mida protsessoris käskhaaval
täidetakse).
(+: Lihtne teha muudatusi, saab kasutada harjumuspärast tarvara
;
-:
aeglane, füüsilised mõõtmed ei ole vastuvõetavad).
b).
Programne realisatsioon(mikrokontrolleri baasil) – Mikrokontroller
kujutab endast
ühel
kristallil realiseeritud arvutit.
Seal on olemas
CPU, taimer , liidesed , ALU, RAM
jne. Mälu maht on aga piiratud ning ka muud
parameetrid jäävad
PC-le alla. Samas on ta võimeline täitma lihtsamaid
programme . (+:
lihtne teha muudatusi, kasutada tuleb spets.
tarkvara ; -:
aeglane(võrreldes
riistvaralise realisatsiooniga),
suhteliselt odav ja seetõttu ka kehvemate tehniliste näitajatega ,
liiga suur (nt. mobiili sisse panemiseks)).
c).Riistvaraline
realisatsioon (oma mikroskeem)-
Alati
võib
algoritmi realiseerida riistvarana nagu jäiga loogikaga
juhtautomaat protsessoris (st. realiseerida
algoritm loogikaskeemina
).
Loogikaskeemi võib realiseerida trükkplaadina komponentidest
või
kristalli
pinnal ühe
mikroskeemina
( Application Specific Integrated Circuit ). Seega
jaotub riistvaraline realisatsioon omakorda:
Full Custom Design
ning
Semicustom
Design.(+:
Väiksem komponentide arv, turvalisus; -: Tülikas
muudatuste tegemine, pikk juurutamise aeg, väikese projekti korral kõrged
kulud).
d).
Programmeeritav loogika- riistvara
tooriku konfigureerimine vastavalt tema rakendusele.
Konfigureerimiseks kasutatakse põhiliselt kolme tehnoloogiat:
1).
Staatiline suvapöördusmälu( SRAM ) - SRAM
tehnoloogias moodustatakse toorikul
SRAM
trigeritest suur nihkeregister.
2). Anti-Fuse ja
Fuse tehnoloogiad – võimalik
on luua programme, põletades maatriksi sõlmedesse fuse ühendusi.
3). EPROM ,EEPROM
ja Flash tehnoloogiad- nendesse
püsimälu tüüpidesse on samuti võimalik programme realiseerida
ning neid on võimalik ka eemaldada(UV-kiirgusega).
17.
Alamprogrammide poole pöördumine[2]*Alamprogramm(
subroutine)-
on programmeerimiskeeles (antud juhul
Assembly ’is)
lähtekoodi korduvkasutatav osa, mis täidab mingit kindlat
funktsiooni.
*Uue alamprogrammi
väljakutse tähendab seda, et peaprogrammi täitmine jääb teatud
kohas poolikukst ning peale alamprogrammi töö lõpetamist
peaprogramm jätkub
samast kohast.
*Alamprogrammide poole
pöördumist on
ideaalne
rakendada pinumälu
abil, vastava protsessi kirjeldus näeks lühidalt välja järgmine:
(a)Esmalt
inkrementeerub käsuloendur (PC = PC+1) ehk nt. (0004 => 0005)
ning mälust kantakse käsuloendurisse(IR) järgmine käsk (oletame,
et see on
CALL käsk,
mis viitab
mälu
asukohal 00FF olevale alamprogrammile).
Käsuloendur inkrementeerub
veelkord (PC = PC+1) e. (0005 =>
0006).
(b)Mälu
mingis muus piirkonnas asuva
pinu
pinuviita
(SP)
dekrementeeritakse: SP = SP -1, et pinu tippu oleks võimalik lisada
uus andmeelement. Viimane käsuloenduri väärtus enne alamprogrammi
poole pöördumist
(0006)
„lükatakse“ pinu tippu.
(c)Juhtimine
läheb üle alamprogrammile aadressil
00FF.
Alamprogrammi käsud täidetakse tagasipöördumise käsuni (RET).
(d)Pinumälu
tipust
„tõmmatakse“
sinna salvestatud käsuloenduri aadress
(0006) ning see salvestatakse tagasi käsuloendurisse.
(e)Pinuviit
inkrementeerub (SP = SP +1) järgmise „tipuelemendini“ ning
peaprogrammi täitmine jätkub.
*Samal põhimõttel
käituvad ka
mitmedimensionaalsed
alamprogrammid:
käsuloenduri
väärtused paiknevad üksteise otsas
pinumälus ning niipea, kui kõige madalam alamprogramm lõpetab oma
töö, pöördutakse tagasi üks aste kõrgemale - kõrgema astme
„jätkamise“ aadress saadaksegi pinu tipust.
18.
Vahemälu (Cache)
organiseerimine:
otsevastavusega, assotsiatiivne ja kogumassotsiatiivne[2]*Vahemälu töö
üldine kirjeldus:
Cache’i kontroller analüüsib protsessorist põhimälu poole
minevaid aadresse ning juhul kui protsessori poolt nõutav mälusõna
leitakse ka cache’ist , toimub sündmus
„hit“,
mispeale
peidikmälu paneb mälusõna siinile ning protsessor saab selle kätte
hoopis kiiremini kui ta oleks selle saanud suvapöördusmälust.
*
Peidikmälu
jagatakse oma tüübi poolest veel: a).
Otsevastavusega peidikmäluSee on lihtsaim
vahemälu organiseerimise viis. Oletame, et info on põhimälus
jaotatud ridadeks (
Line),
mis omakorda paiknevad segmentides (
Set).
Vahemälus
sisaldub vaid üks pesa iga järjekorranumbriga reale (
Line).
Seetõttu ei saa vahemälus korraga paikneda näiteks
„ segment 0, rida 1“ ning
„segment
2, rida 1".
Selleks, et kindlaks määrata, millise segmendi vastav rida
parasjagu
vahemälu positsioonis „
rida
1“ paikneb,
on vahemälus iga rea kõrval
hetkel kasutatava segmendi number. Vahemälu
kontroller võrdleb, kas vastava rea juures on soovitud segmendi
number. Kui segmendi
numbrid kattuvad, toimub
hit
ning rea sisu tõstetakse siinile. Kui aga segmendi numbrid ei kattu,
pöördub protsessor põhimälu poole.
b). Assotsiatiivne
peidikmäluAssotsiatiivse
peidikmälu puhul toimub vaste otsimine peidikmälust sisuliselt
temale vastava põhimälu aadressi järgi. Samuti võib peidikmälu
mistahes positsioonis sisalduda mistahes mälusõna. Assotsiatiivne
tehnoloogia on väga efektiivne, kuna ta ei piira vahemälusse
salvestamise võimalusi ent tänu tema pikkadele aadressitele ning
kõrgele hinnale on ta
utoopiline lahendus. Miinusena lisandub ka
tema
oskamatus
oma sisu asendada :
selleks on erinevaid
strateegiaid nagu
LRU,
LFU, FIFO
jne.
c).
Kogumassotsiatiivne peidikmäluKogumassotsiatiivne
vahemälu on sisuliselt kompromiss assotsiatiivse ning
otsevastavusega peidikmälu vahel – selles kasutatakse elemente
mõlemast
tehnoloogiast . Samuti on ta
nendest reaalselt laialdaselt
kasutatuim.
19.
Pooljuhtmälud[2]*Pooljuhtmälud
jaotatakse
üldiselt kahte suurde rühma:
säilivateks
ning
mittesäilivateks.
*Mittesäilivad(
voltaile)
pooljuhtmälud vajavad andmete „meelespidamiseks“ pidevat voolu,
seadme väljalülitamisel kaovad neis sisalduvad andmed. Mõningad
näited:
a).
Staatiline
RAM(SRAM)
-
Koosneb
trigeritest või muudest positiivse tagasisidega elementidest.
Kasutatakse protsessoris töötsüklite ajal vajaminevate andmete
säilitamiseks.
Sisenditeks on aadressisisend, „
ChipSelect“,
„
Output
enabled“,
„
Read/Write“
ning väljundiks data väljund, kust väljutatakse nõutud andmeid.
Andmed säilivad
senikaua , kuni eksisteerib pidev
toide .
b).
Dünaamiline RAM( DRAM )-
Koosneb mälumaatriksist, milles küljes on rea aadressi ning
veeru aadressi
puhvrid , seega mäluaadress edastatakse tegelikkuses kahe
osana .
Andmed tuleb u. 2ms.
jooksul refreshida, vastasel juhul
imbub laeng transistoritest välja
& andmed hävivad.
*
Säilivad(
Non-voltaile)
pooljuhtmälud säilitavad neisse kantud informatsiooni aga ka
vooluringist väljalülitatuna. Väga
levinud
on nö. eelprogrammeeritud säilivad pooljuhtmälud nagu ROMid,
mille sisu muutmisega pole
kiibi eluea jooksul arvestatud (Info on
nö.
hard - code ’itud).
Mõningaid näiteid:
a). ROM(
Read
only memory)-
Üldjuhul kasutatakse ROM mälu e. püsimälu sellise info
talletamiseks, mida edaspidi muuta tarvis ei ole (
BIOS ROM). ROM
mälusse kirjutatakse info juba kiibi tootmise käigus/selleks
mõeldud spetsiaalsete seadmete abil. ROMil puuduvad andmesisendid:
tal on
n
aadressisisendit,
millele vastab
2n
mälu
rida, mis aadressisisendi järgi väljastatakse
m-bitisesse
väljundisse.
b). PROM(
Programmable
Read Only Memory)c). EPROM(
Erasable
Programmable read only memory)d). FlashPROM
(Flash-
Programmable read only memory)-
püsimälu tüüp, mis
leiutati 1984 aastal. Võimaldab hõlpsasti
püsimälus sisalduvat infot muuta. Info kustutamiseks kasutatakse
elektrivälja ja
kustutada saab infot harilikult sõna kaupa.
Isolatsioon kannatab hinnanguliselt ca.
50000 - 100000
kirjutustsüklit.
20.
Mälude klassifikatsioon[2]*Arvuti mälud
jagatakse oma tüübi poolest üldjoonest kahte suurde rühma:
a).
Suvapöördusmälud-
mälu mistahes elemendi poole pöördumiseks kuluv aeg on alati
ühesugune. Suvapöördusmälud jagunevad:
a).Pooljuhtmälud(
Semiconductor
memory):
b).
Mittesäilivad(säilivad
vaid voolu toimel):
1). Staatiline
RAM
2). Dünaamiline
RAM
a).
Säilivad: 1).ROM(
Read
only memory) 1).PROM(
Programmable
read only memory)1).EPROM
1).FlashEPROM
b).Magnetmälu
----->
Säiliv
----> Ferriitmälu (Ferrite
core )- iidne tehnoloogia.
b).
Jadapöördusmälud-erinvate
mäluelementide poole pöördumise aeg
varieerub (ei ole
konstante ).
Jadapöördusmälud jagunevad:
a).Magnetmälu:
a).
Säilivad: 1).
Mullmälu
2). Pehme
ketas (
Floppy drive) 3).
Kõvaketas (
Harddrive)a).Optiline mälu:
a).
Säilivad: 1).
CD-R
2). CD-RW
3).
CD-ROM
4).
DVD
5). Holograafiline
21.
Käsu täitmine protsessoris[1]*Käsu täitmist
protsessoris
nimetatakse ka
von
Neumanni tsükliks.
Käsku täites läbitakse protsessoris järgnevad sammud
(lihtsustatult):
a).
Käsukood laetakse käsuloendurisse (
Program Counter )b).
Käsuloenduri väärtust inkrementeeritakse PC = PC+1
c).
Käsu aadress saabub mälu aadressiregistrisse (
Memory Adress Register ) d).
Aadressi järgi lüüakse mälust küsitav info puhverregistrisse
(
Memory Buffer Register)e).
Mälu puhverregistrist liigub „sõna“ käsuregistrisse
(Instruction
Register)f).
Käsuregistris eraldatakse üksteisest operand ning käsukood,
käsukood läheb juhtautomaati täitmisele, operand aga vastavalt
juhule kas ALUsse või mõnda andmereigstrisse.
g).
Pärast vajalike ALU
tehete /operatsioonide tegemist läheb tulemus
tagasi mõnda andmeregistrisse/suvapöördusmällu.
22.
RISC ja CISC protsssorid; mikroprogramm[1]*RISC
protsessorid(Reduced/ Regular Instruction Set Computing):
RISC-tüüpi
protsessorite ideoloogia aluseks on võimalikult lihtne ja läbinähtav
käsusüsteem (
instruction
set)
ning võime kõik käsud täita otse riistvaras ühe taktiga.
Suvapöördusmälu poole pöördutakse vaid
LOAD &STORE- tüüpi
käskudega, st. vaid andmete laadimiseks/salvestamiseks. (Hoidutakse
mälu lokatsioonide kasutamisest operandidena , kuna mälu poole
pöördumine on aeglane).
RISC protsessorite
plussid:
*Võimas registermälu
*Käskude täitmine
on kiire ning efektiivne
*Andmevahetus
alamprogrammidega on efektiivne
*Lihtsakoelisd käsud,
protsessor töötab väga
effektiivselt , rõhutatakse konverit
*CISC
protsessorid(Complex
Instruction Set Computing):
CISC-tüüpi
protsessorite käsuformaat on erinev RISC protsessori käsusüsteemist
sellepoolest, et CISCi käsud on oluliselt
pikemad (nagu ka nimi
viitab), tihtilugu ei ole mingi funktsiooni realisatsioon üles
ehitatud paljudest väikestest käskudest, vaid iga tegevuse jaoks
eksisteerib eraldi käsk. *
Puhtalt
CISC protsessoreid
loetakse üldjuhul aeglaseks, kuna käsud on kohmakamad ning mingi
operatsiooni tätimiseks tuleb läbida rohkem mälust lugemise
tsükleid, raskem rakendada konveierit.
* Moodsad protsessorid on segu RISC ja CISC ideoloogiast,
ehkki RISC on „uuema voolu“ tehnoloogia. (Esimesed protsessorid
olid CISC-tüüpi protsessorid).
23.
Kombinatsiooniskeem ning järjestikskeem[1]*Kombinatsioonskeem(
Combinational
circuits):
digitaalskeem, milles, teades sisendite väärtusi, võime väljundid
üheselt välja arvutada. Seega on kombinatsiooniskeemide käitumine
ettearvatav, kuna nad baseeruvad kindlal(tel)
Boole ’i funktsioonil.
Kombinatsiooniskeeme rakendatakse puhtal kujul eriti just
automaatikas, kus mingi elemendi käitumine ei ole sõltuvuses
välistest teguritest (mäluelementide olemasolu pole vajalik), ent
ka lihtsamat ALU on võimalik realiseerida vaid
kombiantsiooniskeemile toetudes.
*Järjestikskeem(Sequential
Circuits):
digitaalskeem, milles väljundi väärtus sõltub eelmistest,
eelnevatel diskreetsetel ajahetkedel sisendis/väljundis olnud
väärtustest –
skeemil on seega mäluolek. Järjestikskeemi
väljundit ei ole seetõttu võimalik täpselt ette ennustada.
Üldjuhul võib mistahes mäluelemenditdega digitaalskeemi lugeda
järjestikskeemiks. Enimlevinud järjestikskeemideks on registrid,
nihkreregistrid, loendurid jne.
24.Analoog-
ja digitaalinfo. Analoogliides (DAC, ADC)[1] Analooginfo -
Info kandja võib võtta ükskõik millisel ajahetkel oma
rajaväärtuste vahel suvalise väärtuse. Näiteks võib
Schmitti
triggeri
sisendisse tulev signaal pikalt kõikuda
0
ja
5V
vahel – see on analoogsignaal. Lisaks on loodusnähtused nagu
helid, valgus, elektromag-netism ning
elektrivool oma iseloomu
poolest analooglained.
Digitaalinfo-
Info
kandja võib omada vaid kindlalt fikseeritud väärtuseid. Samuti,
digitaalinfo puhul vaadeldakse info kandja väärtusi ainult teatud
ajahetkedel, st.
diskreetsetel
ajahetkedel.
Seetõttu ei ole tähtis vaadelda ka siirdeprotsesse e. üleminekuid
ühelt lubatud väärtuselt teisele.
.
Tuues näide matemaatika vallast:a).
Analoogsignaali
iseloomustab
reaalarvude hulk
R
(pidev
ning lõpmatu). b).
Digitaalsignaali iseloomustab aga
piiratud
naturaalarvude hulk
N
(fikseeritud
võimalikud väärtused, piiratud). Analoog
vs digitaalinfo:*Digitaal-analoog muundur (DAC)–
Digitaal-analoog muundurit võib realiseerida väga mitmel erinval
viisil. Levinuim neist põhineb pingete summeerimisel. Skeemi vasakul
osas on register, kus hoitakse muundatavat kahendkoodi. Peamisteks
komponentideks on siin digitaalselt
juhitavad
lülitid.
Kui vastavas registri järgus on 1, siis lüliti kaudu läheb vastav
pinge
analoogsummaatori
sisendisse. Mida rohkem on
koodis 1’sid, seda suurem arv pingeid
läheb summaatorisse. Sinna jõudnud pingete liitmisel saadaksegi
summaarne pinge.*Analoog-digitaal
muundur(ADC)-
skeemil on
kaks
sisendit:
muundatav analoogsisend ja konstantne fikseeritud referentspinge
Vref.
Referentspinge on ühendatud jadamisi takistitega. Edasi tuleb
analoogvõrdlusskeem,
mille väljundisse ilmub loogilisele 1’le vastav pinge, kui
analoogsisendi
pinge on kõrgem
antud
järgu referentspingest.
Muundamisel saadud kood
ei
ole veel
kahendkood- koodimuundur teisendab muundamisel saadud koodi
kahendkoodiks.
25.Aritmeetika-loogika
seade (ALU)[1]ALU
(Arithmetical
and Logical Unit )-
Sõltumata
arvuti ja protsessori ehitusest on arvutis alati üks skeemiosa, kus
teostatakse
otsesed arvutustehted ja muu infotöötlus - nimelt on
selleks aritmeetika-loogikaseade ehk ALU. Eri protsessoritel on
üldiselt erinev tehete hulk ja valik, kuid tavaliselt hõlmab see
aritmeetilisi (minimaalselt liitmine ja lahutamine) ning loogilisi
tehteid (JA, VÕI, EITUS) ja nihutusoperatsioone (kahendarvu bitid
nihutatakse oma senise positsiooni suhtes kas vasakule või
paremale). ALU realiseerib oma tehteid järgmiselt(
lihtsustatult):
a).
Andmesisendisse #1 ning andmesisendisse #2
kommuteeritakse vastavalt kas protsessori registermälust või
suvapöördusmälust (2) operandi, millega tehet soovitatakse
sooritada.
b).
Läbi n kontrollsisendi
reguleeritakse, millist tehet parasjagu tehakse.
c).
Seejärel clockitakse operandid
läbi tehtele vastava kombinatsiooniskeemi ning multipleksorid
kommuteerivad väljundisse õiged väärtused iga arvujärgu jaoks.
d).
ALU väljund clockitakse tagasi
kas protsessori andmeregistrisse või suvapöördusmällu.
26.Võrdlusskeem[1]*Võrdlusskeem ehk komparaator on
digitaalskeem, mis sisendisse tulevaid operande omavahel võrdleb
ning teeb kindlaks,
kumba sisendisse kahendarvuna antud väärtus on
suurem. Üldjuhul on n-bitised komparaatorid realiseeritud
1-bitistel või 2-bitistel komparaatoritel. Skeemi tööd võib
jämedates joontes ettekujutada järgmiselt:
a).
Komparaatori andmesisenditesse
kantakse võrdlemiseks 2 „sõna“.
b).
Esmalt võrldeb komparaator
sisendisse saadud sõnade suurimaid kahendjärke: kui üks on teisest
suurem, aktiveeritakse läbi OR elemendi vastav väljund.
*Kui
kahendjärgud
on võrdsed,
liigub signaal edasi AND
gate ’i, mis kõigi kõrgete sisendite
puhul annab väljundi A==B(sõnad on võrdsed).
*
Tõenäolisem
on
aga, et mõnes
madalamas järgus esineb erinvus ning selle tulemusel
aktiveeritakse jällegi läbi OR gate’i vastava sõna „ülemvõimu“
kinnitav väljund.
*
Üldjuhul
ongi komparaatoril 3
erinvat väljundit:
a).Väljund
#1:
AB27.Analoog-
ja digitaalinfo. Helikaart[1]Analooginfo-
Info kandja võib võtta ükskõik millisel ajahetkel oma
rajaväärtuste vahel suvalise väärtuse. Näiteks võib
Schmitti
triggeri
sisendisse tulev signaal pikalt kõikuda
0
ja
5V
vahel – see on analoogsignaal. Lisaks on loodusnähtused nagu
helid, valgus, elektromag-netism ning elektrivool oma iseloomu
poolest analooglained.
Digitaalinfo-
Info
kandja võib omada vaid kindlalt fikseeritud väärtuseid. Samuti,
digitaalinfo puhul vaadeldakse info kandja väärtusi ainult teatud
ajahetkedel, st.
diskreetsetel
ajahetkedel.
Seetõttu ei ole tähtis vaadelda ka siirdeprotsesse e. üleminekuid
ühelt lubatud väärtuselt teisele.
.
Tuues
näide matemaatika vallast:a).
Analoogsignaali
iseloomustab reaalarvude hulk
R
(pidev
ning lõpmatu). b).
Digitaalsignaali iseloomustab aga
piiratud
naturaalarvude hulk
N
(fikseeritud
võimalikud väärtused, piiratud). Analoog
vs digitaalinfo:*Helikaart on
arvuti lisakaart, mille ülesandeks on väljastada (ja vastu võtta)
helisignaale, järgides arvutiprogrammi juhiseid. Helisignaalide
väljastamisel kõrvaklappidesse või kõlaritesse tekistatase
õhuvõnked, mida inimese kõrv tajub
helina . Moodsad helikaardid on
ühendatud emaplaadi
PCI
siiniga.
Helikaardi
tähtsamad koostisosad:
a).
Igal
kaardil peab olema
digitaal-analoogmuundur(DAC),
mille abil muudetakse digitaalsed andmed analoogsignaaliks. Tekkinud
analoogsignaal saadetakse seejärel näiteks kõrvaklappidesse või
helivõimendisse.
b).
Sageli kuulub helikaardi kosseisu ka
analoog-digitaalmuundur(ADC),
mis muudab sissetuleva helisignaali digitaalsignaaliks, võttes
väikeste
ajavahemike tagant
(mõõtmise
sagedus näiteks 44,1KHz, nagu loengus mainitud )
analoog-helisignaalist hetkeväärtusi
(sampling).
Saadud hetkeväärtused lähevad digitaalsel kujul arvuti mällu,
kust neid vajadusel uuesti sisse loetakse.
28.Siirete(hargnemiste)
ennustamine (Branch
prediction)[1]*RISC-protsessorite
poolt arvutitehnikasse toodud konveiertehnika ülima efektiivsusega
kaasnevad paraku ka mõned tõsised ja kohati raskesti lahendatavad pudelikaelad :
a).
Admesõltuvus
(
data
dependancy)
b).
Tingimuslausete ümberjuhatused (
branching
pipeline bubbles)
*Esimene probleem
on
lahendatud tehnilise
nipiga , mis vajamineva operandi kiirkorras
eelmisesse konveieri sammu kannab(
internal
forwarding),
ent teisele probleemile konkreetne lahedus puudub.
*Tingimuslausete
ümberjuhatustega toimetulekuks
on protsessorites sageli realiseeritud eraldi loogikaskeem, mis
tegelebgi hargnemiste ennustamisega. Mõningatel juhtudel toimib
hargnemise ennustamine staatiliste kriteeriumite baasilt, ent eriti
just moodsamates protsessorites on hargnemiste ennustamisega
tegelevad skeemid ka „õpivõimelised“.
*Erinvad strateegiad:
(a)
Fixed
Branch Prediction;
(b)
Static
Branch Prediction;
(c
)
Dynamic Branch Prediction;
*Hargnemiste
ennustamine seisneb iseenesest selles,
et skeem üritab ära arvata, kas andmeid tuleks sisse lugema hakata
uuest mälu asukohast, millele masinkoodi tingimuslause viitab, või
jätkata siiski vanast (see on juhul, kui siiret „
ei
võetud“).
Kui siirde ennustamise suhtes langetatakse siiski vale otsus, tuleb
konveier käskudega täis
laadida otsast peale, millega kaasneb suur
ajakulu - siit tuleneb ka vajadus taolise tehnoloogia järele.
29.Katkestused
arvutis (Interrupt)[1]*
Katkestus (interrupt)
on
üks kahest põhilisest tehnoloogiast
pollimise(
polling)
kõrval, millega
programmid või I/O seadmed vajadusel
ajutiselt protsessori tähelepanu püüavad. Et aga pollimine on energia- ning
ressursinõudlik (pidev programmide ning I/O seadmete „küsitlemine“
nõuab palju aega), kasutatakse enam katkestustel põhinevaid
süsteeme.
*Katkestused on
realiseeritud
katkestusnõuete(
IRQ
e. Interrupt Request)
baasil – katkestusnõue on asünkroonne signaal, mille saabudes
protsessor salvestab oma hetkelise töö jätkamiseks vajalikud
andmed ja asub seejärel sellele katkestusele vastavat ülesannet
täitma. Katkestuse saabudes:
(a) lõpetab
CPU
ajutiselt oma töö.
(b)
käsuloendri
väärtus
ning
lippude registri väärtused
salvestatakse pinumälusse. (c)CPU täidab katkestuse poolt nõutud
tegevused.
(d)pinumälust
loetakse tagasi
salvestatud
väärtused
ning jätkub peaprogrammi täitmine.
*Katkestused jagunevad
oma
otstarbe poolest erinvatesse rühmadesse:
a).
Riistvaralisd katkestused- sisend/väljund
seadmed paluvad oma puhvrite lugemist ning info töötlemist: näiteks
klaviatuuri nuppudele vajutamisel.
b). Tarkvaralised
katkestused-
mõni taustal
jooksev programm palub näiteks andmete kõvakettale
edastamist.
*Katkestused
on liigitatud ka prioriteetsuse järgi
- mida kõrgem on katkestue prioriteet, seda kiiremini seda
teenindatakse.
30.Protsessori
üldstruktuur[1]*Protsessor teostab
mitmesuguseid operatsioone mälus paiknevate käskude ning andmete
toel. Üldjuhul kuuluvad protsessori ehitusse alati
käsuloendur,
käsuregister,
käsudekooder,
juhtautomaat, ALU
ning hulk
andme-
ja aadressiregistreid. Käsu
täitmist protsessoris nimetatakse ka
von
Neumanni tsükliks. Protsessori
osade funktsioonid:
a).
Käsuloendur(
Program
Counter)-
Käsuloenduri ülesandeks on viidata järgnevalt täitmisesse mineva
käsu aadressile mälus. Käsuloendur ei ole tegelikult kuidagi
seotud loendamisega, ta on tühipaljas
viit . (Nagu ka loengus
mainisite, on Intel oma protsessorites käsuloenduri üleüldsegi
ümber nimetanud
Instruction
Pointer’iks
- see nimi kajastab palju paremini tema funktsiooni).
b).
Käsuregister(
Instruction
Register)-
võtab mälu puhverregistrist(MBR) töötlemiseks vastu käsukoodi +
operandid, mis üksteisest eraldatakse. (käsukood suundub
käsudekooderisse, operand on aga tavaliselt mäluaadress vajalikele
andmetele).
c).
Käsudekooder(
Instruction
Decoder)-
dekodeerib käsuregistrist saadud käsukoodi ning edastab vastava
signaali juhtautomaadile (näiteks määrab kindlaks, kas
realiseerida tuleb ADD, OR või MUL).
d).
Juhtautomaat(
Control
Unit)-
Vaieldamatult protsessori tähtsaim osa: ta aktiveerib täidetavale
käsukoodile vastavaid signaale ning kontrollib nendega kogu
ülejäänud protsessori tööd. (Nt. aktiveerib mäluregistri, et
viimane haaraks siinilt info jne). Juhtautomaadid erinvad
muuseas teineteisest oma ideoloogia poolest: eksisteerivad nii
mikroprogrammeeritavad
juhtautomaadid
kui ka
jäiga
loogikaga juhtautomaadid
(käsusüsteemi uuendamine pole viimasel juhul võimalik).
Juhtautomaadi disain on oluline, kuna ta neelab ligikaudu 60% kogu
kristallipinnast.
e).
ALU (Arithmetic-Logic
Unit)-
ALU funktsiooniks on aritmeetika-loogika tehete
sooritamine . ALUsse
kantakse sisse teatud arv operande, millega
sooritatakse juhtsignaali
poolt kindlaksmääratud tehe ning seejärel pannakse tulemus taas
siinile, kust ta suundub tagasi registritesse/mällu.
f).
Andme- ja aadressiregistrid-
Andme- ning aadressiregistrites säilitatakse ajutiselt infot, mida
protsessor
parajasti töötleb. Et sisenemisaeg mällu on
suurusjärgus ~50ns on oluliselt efektiivsem kasutada
kiirema sisenemisajaga registreid.
31.Optilised
mäluseadmed[1]*CD-ROM:*Info
salvestamiseks kasutatakse peegelduvat materjali, milles on süvendid.
Rada on CD-ROM’il
spiraali kujuline (mitte konstentriline nagu
kõvakettal). Lugeva laseri
positsioneerimine on analoogiline
kõvaketta peade positsioneerimisega. Peegeldunud laseri kiir
teisendatakse elektriliseks signaaliks.
*Süvendite(pit)
sügavus on üldjuhul ¼ lanepikkusest. Tänu sellele läbib
süvendisse sisenenud kiir ½ lainepikkuse võrra pikema tee ning
läheb
ketta pinnalt peegeluva lainega vastandfaasi. Seetõttu
tuntakse tegelikult info lugemisel ära üleminekuid, mitte
süvendeid. Salvestamisel kasutatakse omakorda spetsiaalset 14-bitist
koodi, kus ei ole kunagi kõrvuti kahte ühte (kuna üleminek vastab
1’le, pole neid lihtsal võimalik kõrvuti teha). Et vältida
segadusi, on iga koodi vahel kolm bitti
eraldajat.
Laserit
kasutatakse valgusallikana seetõttu, et tema valgus on
monokroomne .*CD-R: Ehituselt
vägagi sarnane CD-ROMile, ent põhimiku ja metallikihi vahel on
hoopiski valgustundlikust orgaanilisest materjalist (nt. tsüaniinist)
andmekiht. Sarnaselt CD-ROMile on rada spiraalikujuline. Vagude
asemel on aga materjali kerge sulatamisega mittepeegelduvaks muudetud
piirkonnad, mida peetakse lohkudeks.
*CD-RW:
andmekihi pind koosneb erilistest keemilistest komponentidest, mis
võivad olekut korduvalt muuta ja säilitada sõltuvalt
temperatuurist. Materjali kuumutatakse esmalt ühe temperatuuriga
ning lastaks siis jahtuda, et ta kristalliseeruks - seejärel
kuumutatakse vaid vajaliku osa teise temperatuuriga, et lõhkuda
jällegi
kristalliseerunud pind. Kristalliseerunud pind peegeldab
valgust paremini ning seega
saavutatakse sarnane
effekt CD-Ri ja
CD-ROMiga.
32.Magnetmäluseadmed[1] Kõvaketas:*Info
salvestamine
kõvakettale toimub tehniliselt tema magnetpinna ümbermagneetimisel.
Iga
bitt kujutub
doomeni
(see on piltlikult nagu kompassinõel) asendiga: kas üles või alla
(0 või 1). Kaheksa sellist doomeni moodustavad okteti (ehk baidi).
Tehnoloogilistel põhjustel loeb ja kirjutab pea terve bloki
korraga - see on füüsiliselt paljudel kõvaketastel 512 B.
*Selleks kasutatakse
lugemis/kirjutamispead,
mis on magnetmaterjalist ja mille peal on mähis.
Juhtides
mähisesse voolu ühes või teises suunas tekib ka vastava
suunaline magnetväli. Magnet jõujooned kaarduvad materjalist välja sinna
tehtud
pilu kohal mis aga omakorda on salvestus materjali lähedal.
Lugemise puhul lugemispea
all registreeritakse pingehüppeid, mis on tingitud üleminekutest
0’ist 1’te ja vastupidi.
*Kõvaketas pöörleb
umbes
3600 …15000 RPM ning tema tõrgeteta tööajaks loetakse
200000….500000 tundi.
*Kui pea peaks
puudutama
magnetmaterjali,
on magnetmaterjal rikutud. Moodsatel kõvaketastel on peal
kondensaatorid , mis võimaldavad kõvaketast vooluga toita senikaua,
kuni lugemispea ketta kohalt ära tõstetakse.
Magnetlintseadmed:Lint pressitakse lugemis/kirjutamispea vastu. Kummist võll tagab
konstantse kiiruse. Massiivsemate magnetlintide korral on aparaadil
kaks vaakumtuubi, mis hoiavad magnetlindi teatavat varu (juhuks kui
üks ketas peaks hakkama teisest kettast kiiremini liikuma).
Suhteliselt arhailine mälu üksus, ent suure mahu tõttu kasutatakse
ka tänapäeval, peamiselt
arhiveerimise eesmärgil.
33.Klaviatuur[1]*
Klaviatuuri
kõikide
klahvide all on lülitid. Lülitid võivad olla kontaktidega
või kontaktivabad.
*Kontaktide
puhul
on oluline vältida mustuse sattumist kontaktide vahele. Väga laialt
on levinud ka
klaviatuurid , kus kasutatakse metalliseeritud
plastmassist kilet (
membrane
switch),
mis täidab ühtlasi ka vedru ülesannet.
*Klaviatuur
moodustab maatriksi,
kus
horisontaalid on ühendatud väljund-pordi külge. Vertikaalid on
aga kõik ühendatud läbi kaitsva
takisti toite nivooga (väärtus
1) ning maatriksi
allosas on nad seotud sisend-pordiga. Kõigis
horisontaalide ning vertikaalide ristumiskohtades on lülitid
(klahvid).
*
Scan
koodi
saamiseks saadetakse horisontaalliinidele kood, kus on väärtus ’0’
vaid kõige ülemisel horisontaalil. (Ülejäänud horisontaalide
väärtusteks on 1’d). Kui nüüd on mõni ülemise horisontaali
klahv alla vajutatud, siis on ka vastaval vertikaalil väärtus 0.
Teades horisontaalile väljastatud koodi ning vertikaalidelt loetud
koodi, saabki kindlaks teha, milline klahv on alla vajutatud. See
ongi
Scan-kood.*Samuti,
kui alla on vajutatud klahv
mõnel
teisel horisontaalil,
kus on
väljundpordi
kaudu antud väärtus üks,
siis see ei mõjuta vertikaali väärtust kuidagi. Et kontrollida
kõiki klaviatuuri klahvide ridu, saadetakse horisontaalidele kood,
kus järgmisel liinil on null ja kõik ülejäänud on ühed. Sellega
kontrollitaske kas järgmisel horisontaalil on mõnda klahvi
vajutatud. Nii kontrollitakse järjest kõiki horisontaale.
34.Mälu
hierarhia arvutis[1]*Mälu
hierarhia tipus on
suhteliselt väikesemahuline, kuid kiire registermälu. Registermälu
sisaldub protsessoris eneses ning töötab väga suuretel kiirusetel.
Tüüpiliselt on registermälu mahuks 100B, 5ns’ pöördmisaja
juures. Registermälu on suhteliselt kallis ja sellepärast ongi ta
maht üpriski piiratud.
*Peidikmälu:
Peidikmälu
liigitub samuti suvapöördusmälude alla ning on oma pöördumisaja
poolest tunduvalt kiirem põhimälust. Peidikmälu on oma
olemuselt väikesemahuline mäluüksus, kuhu on salvestatud protsessori poolt
enimkasutatavad andmed põhimälust. Peidikmälu jagatakse tasemete
kaupa L1, L2 ,L3 cache’ideks, kus iga järgnev on pisut suurem ent
ka veidi aeglasem eelmisest.
*Põhimälu
ehk nö. tavaline RAM:
Eelnevatest
mälutasemetest juba tunduvalt aeglasem ja mahukam mäluüksus.
Pöördumisaeg näitusena 50ns, suurus moodsamatel arvutitel
1-8GB. Paikneb eraldiseisvate kiipidena emaplaadil.
*Kõvaketas:
Kõvaketas liigitub oma tüübi poolest juba jadapöördusmälu alla,
ent ta on arvuti põhiliseks „andmemaardlaks“. Kui arvuti on
välja lülitatud, paiknevad kõik vajalikud andmed kõvaketal.
(Arvuti üleslaadimisel kantakse sealt vajalik mäludesse jne).
Pöördumisaeg näitusena 10ms, maht 10 - 1000GB.
*CD-ROM:
100ms, 700MB, odav ning teisaldatav.
*
Perifeeriaseadmed
(
magnetlint ,...)100GB;
35.
Mälu organiseerimine: koostamine mitmest moodulist ja vaheldamine
(Interleaving).[1]*Üldjuhul määrab
andmesiini järgulisus
(nt. 16,32,64bit) ära ka sõna järgulisuse mälus, kui sõna ei
edastata just osade kaupa (mida on muuseas ka võimalik
realiseerida).
*Suureks
probleemiks
muutmälude puhul on aga see, et puht-tehnoloogilistel põhjustel
pole võimalik valmistada
kogu
adresseeritavat
mälu
ühe
mooduli
baasil. Seetõttu koostatakse mälusid sageli mitmest moodulist.
*Mitmest pangast (moodulist) koosneval mälul
võivad järjestikused sõnad olla organiseeritud kahel viisil:
a).
Mälusõnad võivad paikneda pankades
järjestikku,
st. näiteks mälulokatsioonid (0000-00FF) asuvad
(pangas
0),
mälulokatsioonid (00FF-01FE) asuvad
(pangas
1). Selline
lahendus pole väga efektiivne.
b).
Järjestikused mälusõnad paiksnevad
kõik
erinevates pankades.
Sellist tehnoloogiat nimetatakse ka
vaheldamiseks(
Interleaving)
ning ta on oluliselt kasulikum järjestikulisest ladustamisest, kuna
ta võimaldab mälust lugemisel/kirjutamisel käivitada
konveieri.
Odavamates süsteemides pole alati vaheldamist kasutatud -
see tuleneb tõenäoliselt
hinnast .
*Selleks et
vaheldamist
rakendada, peavad mälumoodulid
olema
identsed.
Vaheldamine muudab tunduvalt efektiivsemaks ka DRAM-tüüpi mälude
kasutamise, kuna ta aitab kompenseerida viimase pisut aglasemat
sisenemisaega.
36.
Printerid[1]Laias
laastus jaoatakse printerid
löögiga
ning
löögita
printeriteks.
Löökprintereid
kasutatakse nüüdisajal vaid vähenõudlikute ülesannete jaoks nagu
pangakviitungite trükkimine jms.
*
Nõelmaatriksprinter-
Nõelprinter, mille prindipea sisaldab üht või kaht rida nõelu,
millest moodustatakse tähekujundeid ja siis surutakse läbi tindiga
immutatud lindi vastu paberit. Mida rohkem on nõelu, seda parem on
printeri eraldusvõime(nt. 9 nõelaga saab mustandikvaliteedi, 24
nõelaga kirjutusmasinakvaliteedi jne). Printimiskiirus ulatub
200...400 tähte sekundis e. 90-180 rida minutis. Maatriksprinteri
nõelu saab juhtida solenoididega. Odav ning lärmakas. Tänapäeval
ei ole laias kasutuses.
*Laserprinter
– Tööpõhimõte
on järgimine:
a).
Laser
muudab prinditava kujundi valgustäpikesteks, mille abil muudetakse
laengut valgustundlikul trumlil. See
trumli osa, millele laseri
valgus langeb, kaotab laengu ning muutub juhiks. Osa, mis laseri
valgust ei saanud, säilitab aga laengu ning seeläbi tekib trumlile
sisuliselt laengust kujund.
b). Trummel paigutatakse seejärel tahmaanuma lähedale.
c).Anumast
lendunud tahmaosakesed tõmmatakse trumli laetud piirkondadele.
d).Tahmane
trummel surutakse vastu paberilehte ning tahm kuumutatakse paberile
kinni
(seepärast
on leht ka soe).
*
Jugaprinter -
Ideepoolest
sarnane nõelmaatriksprinterile ainult siin ei lööda trüki peas
olevate nõeltega värvilinti vaid peas on
pihustid millest
pritsitakse paberile värvaine
täppe. Pihusteid sisaldav trükipea liigub horisintaalselt paberi
läheduses. Vertikaalne liikumine saadakse paberi kerimisega. Neist
värvaine täppidest moodustatakse kujund.
*Värviprinterid-
Printeris
kasutatakse CMYK värvisüsteemi, st. erinvaid värve kombineeritakse
kokku
Cyanist,
Magnetast,
Yellowst
ning
Black ist,
kuna paberi omaduste tõttu pole võimalik kasutada RGB-süsteemi.
*Plotter-
printer ,
milles ei liigu mitte paber, vaid printimispea. Võimaldab teha suure
täpsusega tehnilisi jooniseid.
37.
Juhtautomaat: osa käsu täitmisel ja realiseerimine[1]Juhtautomaat(
Control
Unit)-
on vaieldamatult protsessori tähtsaim osa: ta aktiveerib täidetavale
käsukoodile vastavaid signaale ning kordineerib nendega kogu
ülejäänud protsessori tööd. (Nt. aktiveerib mõne mäluregistri,
et viimane haaraks siinilt info jne).
*RISC
protsessorite puhul
on juhtautomaatide realisatsioonid üldiselt alati keerukamad (kui
CISCi puhul) ning nad peavad täitma märksa suuremat hulka
ülesandeid. RISC protsessori puhul on juhtautomaati võimalik veel
omakorda jagada tükkideks (
scheduling
unit
- ajastamine,
retirement
unit
–konveierist väljuvate
andmetega tegelemine jne).
*Põhimõtteliselt
on juhtautomaadi realiseerimiseks 2 erinevat võimalust:
*Jäiga
loogikaga juhtautomaat(RALU)-
Jäiga
loogika korral realiseeritakse käsu täitmise algoritm
loogikaskeemina kristalli pinnal (nö.
ad
hoc
juhtautomaat) ning iga vajaliku muutuse läbiviimiseks käsusüsteemis
tuleb realiseerida uus loogikaskeem. RALU’de kastamine oli
populaarsem 70’datel-80’ndate alguses, kui veel ei pööratud
väga palju tähelepanu protsessori süstemaatilisusele.
*
Mikroprogrammeeritav
juhtautomaat- Kui
mikroprogrammi hoitakse mingis modifitseeritavas püsimälus(nt.
EPROM või FEPROM), siis saab käsusüsteemis teha muudatusi ilma uut
loogikaskeemi koostamata. Kogu mikroprogrammi täitmine taandub
sõnade lugemisele mikroprogrammi sisaldavast püsimälust. Mida
odavamaks ning suuremaks läks püsimälu, seda enam hakatigi
rakendama mikroprogrammeeritavaid juhtautomaate.
*
Nagu
ka loengus mainitud
sai, on juhtautomaatide realiseerimiseks tegelikult välja töötatud
terve eraldi haru, kuna juhtautomaati võib suuresti pidada
protsessori südameks ning seejuures
haaravad nad ka ligikaudu 60%
kristalli pinnast.
38.
Koodimuundur[1]*Koodimuundur(Code
converter):
loogikaskeem, mis teisendab sisendkoodi mingisse teise loogikasse.
Näiteks eksisteerivad koodimuundurid, mis konverteerivad andmeid
positiivsest loogikast negatiivsesse loogikasse inversiooni läbi.
Samuti kasutataks koodimuundureid kahendkoodide muundamisel
kümnendkoodideks(
Binary-Decimal)
või kahendkoodide muundamisel Grey koodideks jne.
Igale sisendjärgule vastab (individuaalne) loogikaskeem, mis viib
teisenduse läbi.
Kuna mõningatel juhtudel sarnaneb koodimuunduri töö dekoodri
omale, liigitatakse koodimuundurid sageli dekooderi üheks
alaliigiks.
39.
Erineva pöördus viisiga mälud :FILO, FIFO, assotsiatiivmälu, kahe
pordiga mälu[1]
*Pinumälu(FILO
e. LIFO) –
Pinumälu baseerub LIFO e. “last in, first out” loogikal. See
tähendab, et registrisse viimasena kantud andmed peab sealt ka
esimesena välja võtma. Põhimälus on pinumälu võimalik
realiseerida postinkrementse-
ning predekrementse adresseerimise baasil
(enne
igat „
PUSH“
käsku pinuviita dekrementeeritakse ning peale igat „
PULL“
käsku seda inkrementeeritakse). Riistvaraliselt realiseeritakse
pinumälu nihkeregistrite põhimõttel.
*Puhvermälu(FIFO) –
Puhvermälu baseerub FIFO e. “first in, first out” loogikal, st.
registrisse esimesena kantud andmed saab sealt ka esimesena välja.
FIFO meetodit võib ette kujutada klassikalise nihkeregistri töö
mudeli abil: ühest otsast laetase registrisse kahendväärtusi ning
teisest otsast väljuvad nad täpselt oma sisenemise järjekorras.
*Assotsiatiivmälu(
Content-Adressable
Memory)-
see mälutüüp võimaldab (üli)kiire otsimise mälus võrdlemise
baasil. Erinevalt
tavalisest RAM'ist, kus antakse mälu aadress ja
saadakse sisu, misjärel alles ALUs toimub võrdlustehe, antakse CAMi
puhul ette mälusõna, millega mälukiibis
sisalduvaid kõiki
andmesõnu võrreldakse. Kui kokkulangev andmesõna mälust ka leiti,
antakse harilikult väljundisse vastavate
aadresside loetelu (või
siis eksisteerib
Mulitple
Match Resolver
e. mitme sõna kokkulangemise lahendaja).
*Kahe
pordiga mälu( Dual -ported
RAM)
– kahe pordiga suvapöördusmälu on selline suvapöördusmälu
mälutüüp, mis lubab mitmel lugemis- ja/või kirjutustsüklil
toimuda samaaegselt. Tüüpiliselt on VRAM(
Video
RAM)
kahepordiline, lubades seejuures protsessoril pilti samaaegselt
valmis joonistada kui teda ekraanile kandma hakatakse.
40.
Puudutustundlik ekraan[1]*Takistusel
põhinev(Resistive):
ekraani peal kilekiht, millel takistitega
maatriks . Selle peal teine
kile. Vajutus ekraanile muudab maatriksi mingi elemendi takistust:
ridade ja veergude pingete skaneerimisega on võimalik kindlaks teha,
kuhu vajutati. Lisaks inimsõrme puudutusele reageerib ka
muust materjalist esemete puudutustele. Takistusel põhinev puutetundlik
ekraan tundub näpu all pehme.
(Levinuim,
75% puudutustundlikutest ekraanidest valmistatud antud tehnoloogia
järgi).*Mahtuvusel
põhinev(Capacative):
Ekraani igas
nurgas on
vahelduvvool . Kui asetada sõrm vastu monoliitset klaasist
ekraanipinda, muutub selle mahtuvus. Nurkade kaudu mahtuvusi
arvutades ja trianguleerides, saab leida vajutuskoha koordinaadid.
Erinevalt takistusel põhinevast puudutustundlikust ekraanist, pole
mahtuvusel põhinevat ekraani võimalik kasutada läbi enamiku
isolaatorina käituvate materjalide nagu kindad jms, mis on selle
tehnoloogia vaieldamatuks miinuseks.
*
Akustilisel
pinnalainel põhinev(Surface
acoutsic wave):
on realiseeritud
ultraheli lainete abil, mis radieeruvad üle puutetundliku ekraani
pinna. Kui ekraani puudutatakse, siis osa lainetest neeldub/peegeldub
ning sensorite abil on võimalik kindlaks määrata puudutuse
asukoht. See tehnoloogia on alles prototüüp-faasis.
28








































Kõik kommentaarid