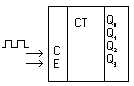
1) Loendurid Loenduriteks
-
Impulsside loendamiseks ette nähtud loogikalülitus.
Loendur on
register , millesse salvestatud arv sisenditele antud signaali mõjul
muutub ühe võrra. Loendureid kasutatakse nii automaatikaseadmetes,
kui ka arvutustehnikas. Loenduril on sünkroonsisend ja m väljundit.
Iga impulsi saabumisel sünkrosisendisse muudab üks või mitu
väljundit oma väärtust. Teadtud arvu väljundkombinatsioonide
järel kogu väljundkombinatsioonide jada kordub. Loenduri sisse
tulevad impulsid ning
väljundiks on 0,1 kombinatsioonid. Erinevate
väljundkombinatsioonide arvu nimetatakse
mooduliks . Loendurit
kasutatakse automaatikaseadmetes ja arvutitehnikas.
E-
sisend , mis lubab loendamise
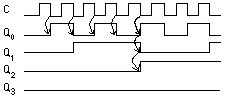
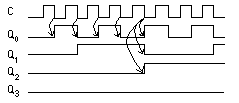
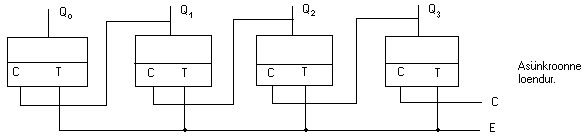
Kaks
diagrammi - üks sünkroonse, teine asünkroonse jaoks.
Sünkroonne
loendur -
ümberlülitumine toimub samaaegselt v. paralleelselt.
Ümberlülitumisaeg
on kogu aeg
samasugune .
Kasut.
arvutites andmetöötluses.
Asünkroonne
- ümberlülitusaeg pole samasugune.
Uue
kombinatsiooni ilmumine sõltub sellest, missugusele üleminek
toimub.
Kasut.
indikatsiooniseadmetes ja sagedusjagajates.
Kahendloendur
–
Kahepositsiooniliste trigeritega, st igal arvu kohal on kaks
võimalikku olekut (0-väljalülitatud, 1-sisselülitatud)
Kümnendloendur
- järjestikuskoodid on 0-9 ja moodul on 10. See tähendab , et
loenduril on 10 erinevat kombinatsiooni, millega ta vastab
sissetulevale impulsijadale.
Suvalise
mooduliga e. grey koodiga loendurid
– kõik järgnevad koodid on naaberkoodid. g= QI+
QI
+1 Suvalise mooduliga e. naaberkoodid on koodid, mis erinevad
teineteisest ainult ühe kahendjärgu poolest. Gray koodi puhul
lülitub korraga ümber ainult 1
triger .
Reversiivne
loendur
- Loendur, mis loendab nii pos. kui ka neg. suunas. Loendussuuna
muutmine sõltub sellest, kas ülekandeks kasutatakse
trigeri otsest
või inverteeritud signaali.
Ringloendur
- Loendur,
mis on moodustatud nihkeregistrist, kui selle väljund ühendada
sisendiga.
2.
Pinumälu(stack) realiseerimine ja kasutamine protsessoris.Pinumälu
– LIFO ehk Last in,
first out. On mälu poole pöördumise viis,
registrisse viimasena
kantud andmed saab esiemsenas välja võtta. Tegemist on
protseduuriga, mis tegeleb andmestruktuuride loeteluga, kus järjest
kantakse andmed registrisse, mis uuesti pealt järjest vastavalt
vajadusele välja võetakse. Andmete lugemiseks või kirjutamiseks
läheb vaja vaid ühte binaarkujul olevat viitava arvuti
mälupiirkonnale, kust register algab. Piltlikult võib kujutada seda
kui protseduuri, kus pabereid lisatakse ühekaupa üksteise otsa ja
vastavalt vajadusele võetakse neid sealt ühekaupa. Kui läheb vaja
võtta välja 5 elementi epalt, tuleb
esmalt ära tõsta tema peal
olnud 4 elementi ning alles siis pääseb soovitud elemendile ligi.
3. Trigerid .Triger
– Mälu
element, mis säilitab 1 biti informatsiooni. Triger on kahe
stabiilse
olekuga loogikalülitus (1 või 0). Trigeri olek vastab
tema väljundsignaalile. Sõltuvalt sisendsignaalist säilitab triger
endise oleku või muudab seda hüppeliselt.
Trigeril tavaliselt 2
väljundit: otsene
Q
ja invertne.
Tööpõhimõtte järgi jaotatakse trigerid seadesisenditega ehk SR-
trigeriteks, loendussisenditega e. T-trigeriteks, andmesisenditega
ehk D-trigeriteks ning universaalsisenditega e. JK-trigeriteks. Kui
trigeri oleku muutmine toimub kasvõi ühe sisendi kaudu täiendava
sünkroniseerimis signaali abil, nim. trigerit sünkroonseks,
vastupidisel juhul aga asünkroonseks. Sõltuvalt tööpõhimõttest
ning ehitusest liigitatakse trigerid ühe- või kahetaktiliseks.
Triger on elementaarne salvestuselement, millel on 2 olekut.
Kasutatakse mäluelementidena registrites, loendurites jne.
Informatsiooni salvestusviisi järgi jagunevad 2-ks:
1)
asünkroonsed
- salvestatakse infi vahetult sisenditesse antud signaalidega.
2)
sünkroonsed
- see on võimalik ainult sünkroimpulsi
olemasolul .
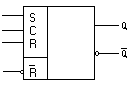
SR
(set-
reset ) , ühe ja
kahetaktiline , antud on asünkroonne, S=R=1 on
keelatud. Töötab: SR; Q(t), 00–>Q(t-1) , 01= 1, 10= 0, 11=-- .
R
S
Qt
0
0
Qt-1
ei muutu
0
1
1
Set
1
0
0
reset
1
1
keelatud
*
a-sünkroonne | * sünkroonneNB!
Keelatud on anda mõlemasse sisendisse
signaal 1.
Sünkroonne
ühetaktiline SR-triger erineb asünkroonsest selle poolest, et
trigeri olek muutub vaid kindlail sünkroimpulssidega määratud
ajahetkeil. Lisaks infosisenditele S ja R on tal veel sünkroseerimis
sisend C (
clock ). Sünkroniseeritud infosisend toimib hetkel, mil
saabub sünkroniseerimis- signaal.
Kahetaktiline
sobib sinna (skeemidesse), kus on vaja saada tagasisidet. Näiteks
mälu vaatamine jne.
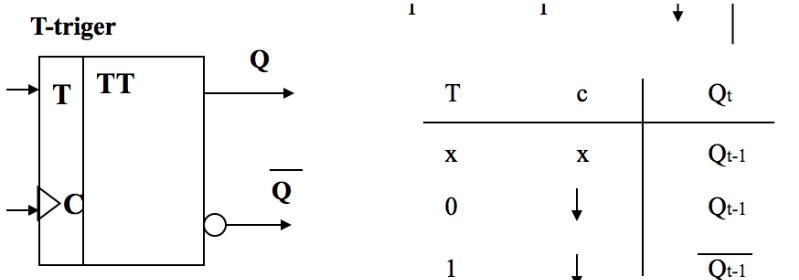
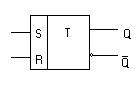
T
(toggle),
1infosisendiga, iga järgmine impulss muudab trigeri oleku
vastupidiseks, nn. loendustriger. Töötab: T; Q(t), 1= -Q(t-1), 0=
Q(t-1)
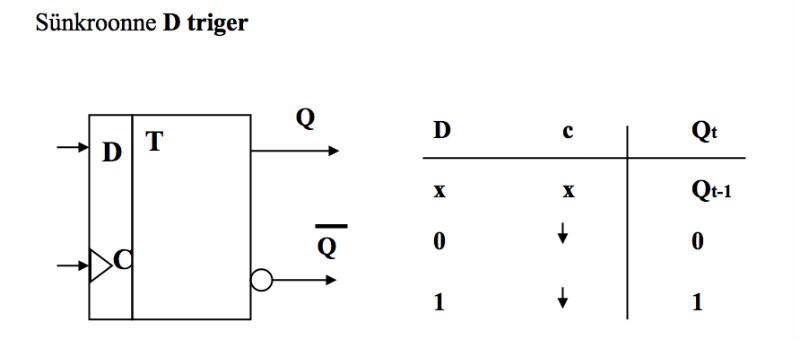
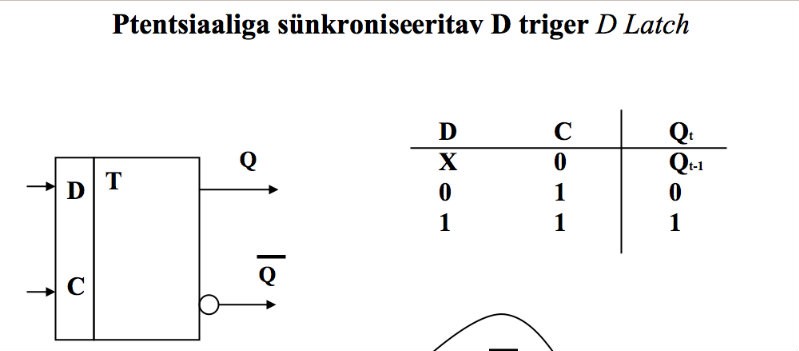
D
(delay), data 1 infosisend,
väljundis kordab sisendi signaali, aga
sünkroimpulsi võrra hiljem, saab säilitada
lühiajaliselt infot.
Töötab: CD; Q(t) , 0 - =Q(t-1) , 11= 1, 10= 0. D trigeril on
sisendit – D andmesisend ja C clock sisend. Niikaua kui C=0,
säilitab triger oma väärtust. Kui C=1, siis antakse trigerile D
väärtus, kas 0 või 1, oleneb D väärtusest. Seega säilitab D
triger oma väärtust seni kuni tuleb uuesti clock sisendisse1. Ehk
kui C=1, Q=D ja C läheb nulliks(C=0), nüüd on trigeri väärtus
Q=D kuni aja t pärast tuleb uuesti sisend C=1 ja siis saab Q
väärtuseks jälle D väärtus.
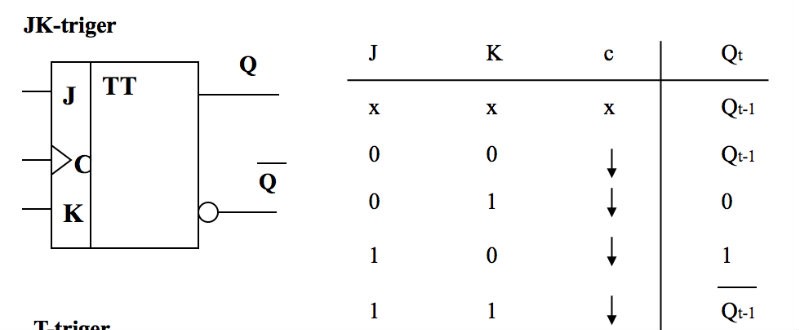
JK
(jump-key), samasugune nagu RS-triger, aint selle vahega et ei ole
keelatud kombinatsiooni. Siin on lubatud J=K=1, mis muudab väljundi
vastupidiseks. Töötab: JK; Q(t), 00= Q , 01= 0, 10= 1, 11= Q
J
K
Qt-1
Qt
0
0
0
0
0
0
1
1
0
1
0
0
0
1
1
0
1
0
0
1
1
0
1
1
1
1
0
1
1
1
1
0
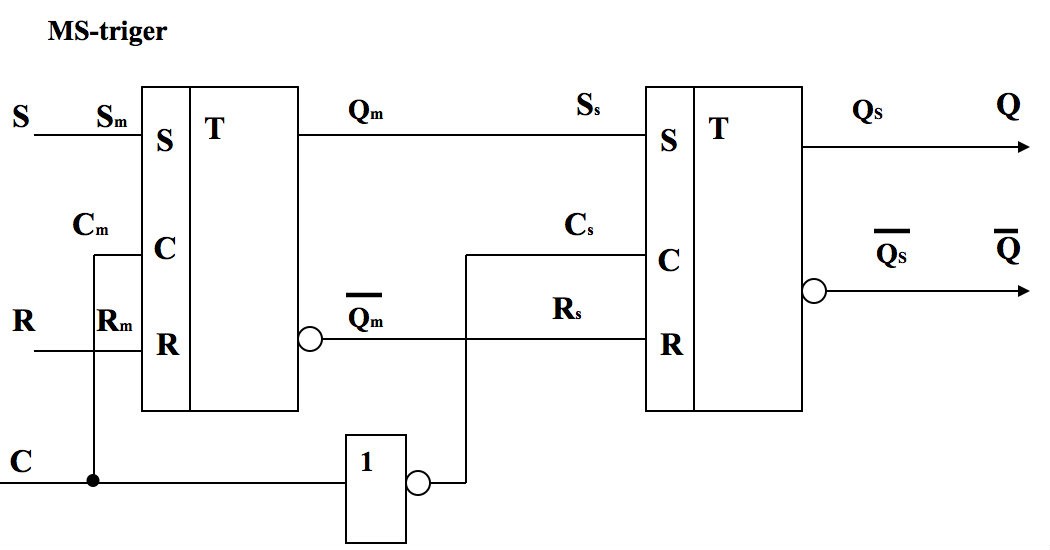
MS
(master-slave) – Kahetaktiline triger. Tegevus käib, kas läbi
Slave’i või Master’i.
4. Adresseerimisviisid.Otsene
adresseerimine – operandid vahetult järgnevatel mäluaadressidel
Vahetu
adresseerimine –
operandide
aadressid sõltumatud ning antakse eraldi
aadressiga kas
registermälus või põhimälus
Kaudne
adresseerimine –
käsukoodis on aadressi aadress, operandide vahetamise võimalus
CPU-de vahel
Autoinkrementne
adresseerimine –
pinumälust lugemiseks (pop) .. aadress saadakse registermälust,
sellele lisatakse operandi mõõt & tulemus läheb pinumälu
järgmisesse aadressi
Autodekrementne
adresseerimine –
registrist lühike aadress, mille järgi pinumälust operandid
(aadressist lahutatakse op. mõõt) &
resultaat pinusse
Segmenteerimine –
kk + aadress segmendis .. kui kõik andmed on ühes mälusegmendis,
segmentidevaheline liikumine käsuloenduri abil
Indekseerimisega
adresseerimine –
aadressibaas & indeks +
nihe -> kui palju peab edasi liikuma,
leidmaks operande, indeksiregister (selles pikk aadress)
Baseerimisega
adresseerimine –
käsukoodiga antakse ainult nihe, aadressibaas asub baasiregistris
Baseerimise
ning indekseerimisega adresseerimine – nii
indeksi- kui baasiregistrid
Suhteline
adresseerimine –
käsukoodiga antakse nihe
5.LCD,
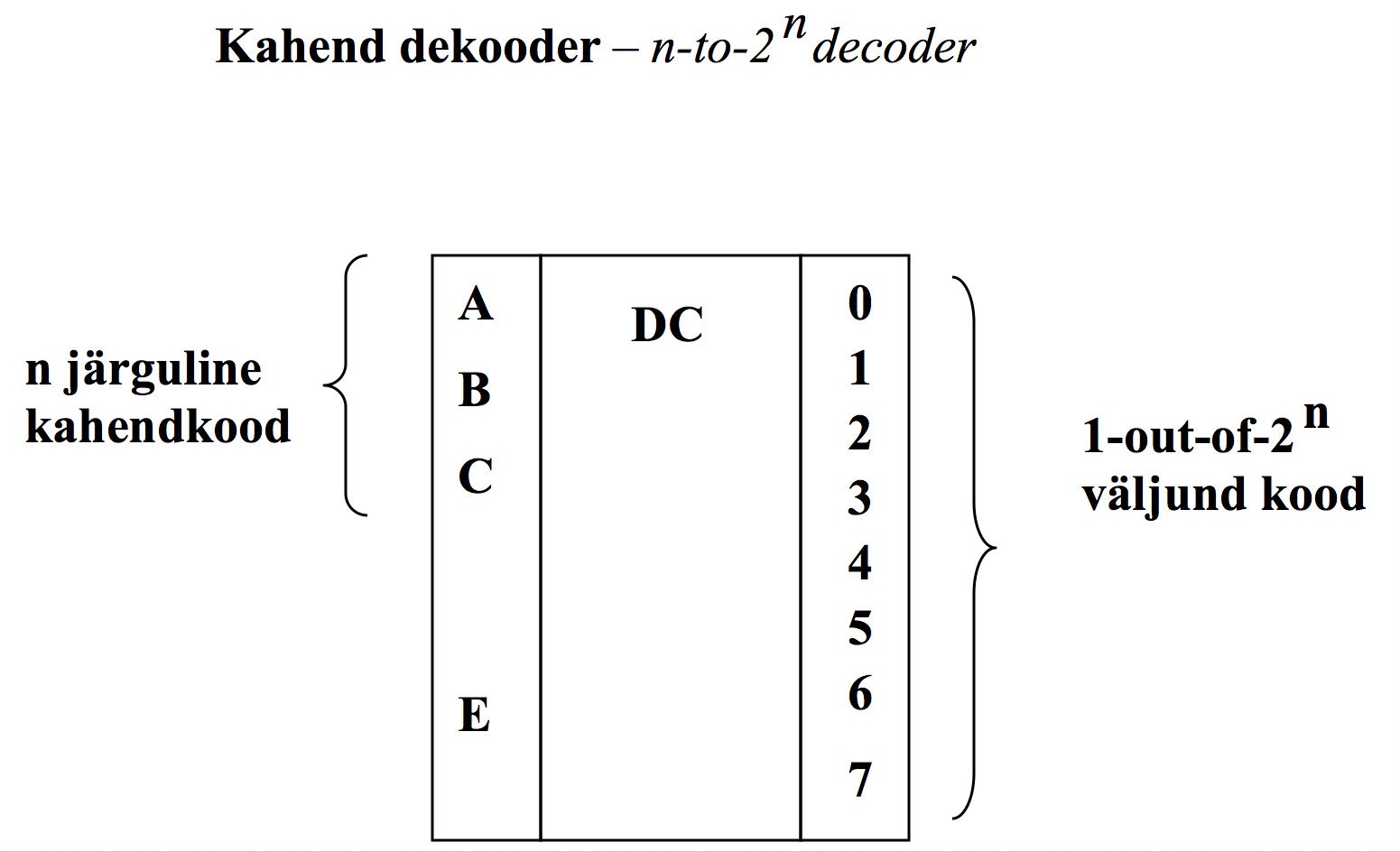
LED, OLED ja plasma kuvarid.6. Dekooder Dekooder -
Lülitus, mis on ette nähtud etteantud sisendkoodi muundamiseks
soovitud väljundkoodiks.
Ta tunneb ära sisestatava kahendarvu ja
annab signaali vastavasse väljundisse.
Dekoodri
ülesanneteks
on muundada kahendkoodis arv niisuguseks koodiks, millega saab
aktiveerida nõutava mälupesa, juhtida number- või
tähtindikaatorit, tunda ära mitmesuguseid kodeeritud signaale jne.
Kuna dekoodri väljundisse ühendatavad
seadmed on erinevad, siis
kasutatakse nende
juhtimiseks ka erinevaid dekoodreid. Näiteks on
indikaatoritest levinumad 7-segmendilised vedelkristall- ja
valgusdioodindikaatorid ning 10 numbrilised huumlahendusindikaatorid.
Seitsme segmendilise indikaatori dekoodril on reeglina 4 sisendit
ning 7 väljundit, kümnenumbrilisel aga 4 sisendit ja 10 väljundit.
Üldjuhul on dekoodril nii mitu sisendit n, kui mitu kohta on
sisendisse antaval kahendarvul. Maksimaalne väljundite arv võrdub
kombinatsioonide arvuga 2n. Dekoodreid koostatakse peamiselt OR
loogika elementidest.
Suure
sisendite arvu korral kasutatakse dekodeerimiseks kaskaadlülitust,
kus esimese astme dekooder aktiveerib ühe teise astme dekoodri ning
see omakorda ühe väljundi.
7.Käsuformaadid
– 0, 1, 2, 3 ja 1,5 aadressiga arvutid .3
aadressiga arvuti – käsukood + I operandi pikk aadress + II operandi pikk aadress +
resultaadi pikk aadress A=B+C
2
aadressiga arvuti –
käsukood + I operandi pikk aadress (resultaat läheb sinna) + II
operandi pikk aadress B=B+C
1,5
aadressiga arvuti –
käsukood + I operandi pikk aadress + resultaadi lühike aadress
(registriaadress)
1
aadressiga arvuti –
käsukood + I operandi aadress. Ac – akumulaatorregister. 1 operand
asub mälus, teine operand ning resultaat samal akumulaatorregistri
aadressil
Käsusüsteem :
andmeedastuskäsud
– MOV,
LOAD ,
STORE aritmeetika-loogika
käsud – AND, OR, SUB, MUL
siirete käsud –JMP, CALL, RET
pinumälu,
I/O-seadmete, CPU juhtimise käsud – PUSH, POP, IN, OUT, NOP
8. Summaator :
Järjestik, parallel, kiire ülekanne.Summaatoriks
nim. arvuti loogikalülitust, mis on
ette nähtud arvkoodide aritmeetiliseks summeerimiseks.
Mitmejärgulise kahendarvu summaator koosneb mitmest ühejärgulisest
summaatorist. Arvu summeerimisel tuleb lisaks kahe summeeritava arvu
vastavatele järkudele liita nendega ka nooremate järkude
summeerimisel tekkinud ülekanne. Seega on ühejärgulisel
summaatoril kolm sisendit ning 2 väljundit. (kaks sisendit ja kolm
väljundit?)
Poolsummaator
- ei arvesta liitmisel eelmisest järgust tulenevat ülekannet.
Kasutades kahte poolsummaatorit, on alati saadav üks täissummaator.
Täissummaator
- arvestab liitmisel eelmisest järgust tulenevat ülekannet
Jada
ülekandega e. järjestikülekandega summaatoris
moodustatakse
väljundsignaal arvukohtade järjestikku
summeerimisega, alates kõige nooremast (parempoolsest) kuni kõige
vanema ehk vasakpoolsemani välja. Arvukoha summeerimiseks ja
ülekande moodustamiseks kulub teatud aeg, mida ülekande
seisukohalt võib vaadelda hilistumisena. Kuna ülekanne toimub
järjestikku, siis aeglustab see summaatori tööd. Suure
kohtade arvu korral on koguhilistumine võrdne hilistumise summaga üksikutes
kohtades.
Rööpülekandega
e. paralleelülekandega
summaatorid töötavad palju
kiiremini kui jadaülekandega summaatorid. Mitmekohalise kahendarvu
summeerimisel moodustatakse ülekanne korraga kõigi kohtade jaoks.
Seetõttu ei kulu ülekandeks lisaaega ning summaator töötab
kiiremini kui jadaülekande korral.
Kiire
ülekandega summaatorid - nende
puhul on rakendatud rööpülekannde põhimõtet kombineeritult koos
jadaülekandega. Ülekanded on moodustatud kõigi kohtade jaoks
korraga.
9.Multipleksor ja
demultipleksor.Multipleksor
- Kujutab endast andmeselektorit.
Multipleksoril on mitu sisendit ja üks väljund.
Sisendid jagunevad
infosisenditeks ja juhtsisenditeks,
kusjuures infosisendite arv
määrab ära juhtsisendite arvu ning vastupidi. Vastavalt
juhtsignaalile kommuteeritakse multipleksori väljundisse signaal
ühest infosisendist. Kommuteeritavate infosisendite arv võrdub 2n,
kus n on juhtsisendite arv. Järelikult saab kahe juhtsisendiga ehk
kahebitise koodiga kommuteerida 4 sisendit, kolme juhtsisendiga 8
sisendit jne.Piisava arvu
sisenditega multipleksori abil saab
realiseerida suvalisi loogikafunktsioone.
Demultipleksor
- Kommutaator, millel on üks
infosisend ja mitu väljundit. Juhtsisendite arv sõltub väljundite
arvust ja vastupidi. Vastavalt juhtsignaalile kommuteeritakse
infosisendi signaal ühte väljundisse. Väljundite arv on 2n, kus n
on juhtsisendite arv. Järelikult saab kahe juhtsisendiga ehk
kahebitise koodiga kommuteerida 4 sisendit, kolme juhtsisendiga 8
sisendit jne
10. Andmeedastus protokollid : sünkroonne, asünkroonne jne.Sünkroonne
– clock reguleerib, millal andmed
loetakse
Asünkroonne
– Siinitsükkel = 'mälu aadress
valmis' genereerib 'mem. read' signaali, lisaks
saadetakse sünkrosignaal, mille peale paneb mälu andmed valmis. Kui andmed
käes,
saadab prose teise sünkrosignaali, mis eelmised maha võtab.
Tagasisideta
siin – DAtaValid signaal, mille
peale võib siini teises otsas asuv seade hakata andmeid lugema
Tagasisidega – DAtaValid signaal, millele vastu
võõtev seade annab DataACcepet signaali. Signaalide kestvusaeg ei
sõltu üksteisest
Täieliku
tagasisidega – Andmed valmis
genereerib DataValid, mis loob DataAccepted. Viimase ilmumisel
kustutatakse 2 esimest.
Ootetsüklite
lisamisega.. kui DataAccepted signaali pole tulnud, ei võeta mälu
aadressi signaali address busilt ära.
Grupi
andmeedastus – antakse
count ..
arv, mitu tsüklit tuleb teha & esimene aadress.. ülejäänud
data võetakse järjestikustelt aadressidelt.
Andmeedastus
konveierina.. uus mäluaadress
pannakse aadressisiinile enne, kui eelmise andmed on kohal
Mux-tud
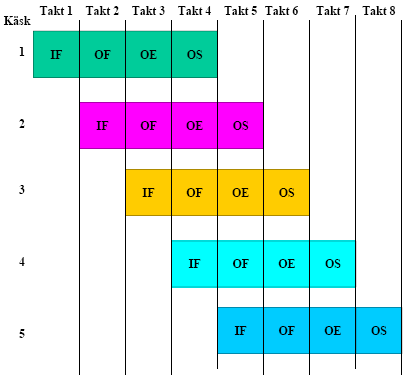
11. Konveier protsessoris ja mälus.Käsu
täitmise protsessoris võib jagada teatud sõltumatuteks etappideks.
Näiteks on siin käsk jagatud neljaks etapiks:1)
IF Instruction Fetch (Käsu
laadimine ) + Instruction Decode
2)
OF Operand Fetch (Operandi laadimine)
3)
OE Operand Execute ( Operatsioni täitmine ALU-s)
4)
OS Operand Store ( Resutaadi
salvestamine )
Programmi
täitmine ilma konveierita:Vaadates
nüüd käsu täitmist
selgub , et iga etapi täitmisel töötab
ainult 20% riistvarast, samas kui 80% ei tee midagi. Siin on üks
käskude täitmise efektiivsuse tõstmise võimalus, mille on
arvutustehnikasse
toonud RISC ideoloogia, nimelt
konveier.
Teeme
nüüd protsessori nii, et need neli käsu täitmise
etappi oleksid
kõik sõltumatud, ligilähedaselt sama kestvusega. Nüüd saame
peale seda kui esimene käsk on läbinud esimese etapi ja jõudnud
teise, alustada juba teise käsu juures esimese etapi täitmist.
Kuivõrd etapid on sõltumatud saame siis, kui esimene käsk on
kolmandas
etapis ja teine käsk teises alustada juba kolmanda käsu
juures esimese etapi täitmist jne. Seega ei ole siin suurenenud ühe
käsu täitmise kiirus kuid tänu käskude täitmise paralleelsusele
täidetakse neid keskmiselt ajaühikus rohkem. Samuti on siin kogu
protsessor pidevalt
koormatud . Analoogiline on konveieri töö
tootmises.
Konveieriga
programmi täitmine (Pipeline):12.Süvapöördusmälud. Random access memory
–suvapöördusmälu( iga
sõna poole pöördumine nõuab ühepalju aega sõltumatta tema
sukohast mälus)Muutmälude
(RAM - random access memory)
põhiliigiks on pooljuhtmälud, mis
koosnevad trigeritest või muudest mäluelementidest. Muutmälud on
toitepingest sõltuvad ning jagunevad kahte liiki, staatilisteks ja
dünaamilisteks. Staatilises muutmälus kasutatakse iga infobiti
salvestamiseks ühte trigerit, mis säilitab infot seni, kuni säilib
toitepinge . Kuna staatilises mälus säilib salvestatud informatsioon
ka pärast mälust lugemist, püsides seal toitepinge olemasolu
korral kui tahes kaua, siis nimetatakse niisugust mälu staatiliseks.
Lihtsaima staatilise
muutmälu struktuur on joonisel. Mälul on 1024
aadressi ja tema kogumaht on 1024
bitti ehk 1024 pesa. Iga
bitt on
salvestatud trigerisse ning triger valitakse rea- ja veerudekoodri
abil. Mälu juhtimiseks kasutatakse järgmisi signaale:
R/W
= 1, (
read/write)
määrab ära lugemisrežiimi;
R/W
= 0, määrab ära kirjutusrežiimi;
CS
= 0, (
chip select ) lubab mälukiibist
bitte lugeda (
D0)
või sellesse kirjutada (
D1);
CS
= 1, mäluelement on süsteemi tööst
välja lülitatud ning ei reageeri aadressi
A9...
A0
koodile ega signaalile
R/W.
Andmesõna pikkuseks on tavaliselt 8, 16, 32 jne bitti. Vastavalt andmesõna
pikkusele valitakse ka mäluelementide ühendamisviis.
Dünaamilises
muutmälus säilib info
MOSFET-transistori
paisu mahtuvuse elektrilaenguna. Tavaliselt säilib see laeng
lekkevoolu tõttu väga lühikest aega. Seepärast tuleb info
säilitamiseks laengut perioodiliselt näiteks iga 2 ms järel
uuendada (regenereerida).
Dünaamiline muutmälu on staatilise mäluga
võrreldes
lihtsama ehitusega (ühe biti salvestamiseks läheb vaja
umbes kaks korda vähem elemente), suurema toimekiirusega ning
tarvitab tööks vähem energiat.
Dünaamilisi
muutmälusid regenereeritakse harilikult regenereerimissignaaliga
REG
ja koos sellega toimub mälu kõigi
ridade järjestikune adresseerimine. Tavaline lugemine ega
kirjutamine pole regenereerimise ajal võimalik, samuti ei saa
regenereerimist alustada lugemise ega kirjutamise tsükli ajal.
Regenereerimishetke kindlaksmääramine, kõigi rea-
aadresside etteandmine, lugemise ja kirjutamise
blokeerimine jms
operatsioonid teevad dünaamiliste pooljuhtmälude kasutamise võrreldes
staatiliste mäludega keeruliseks, sest nad nõuavad lisaelemente.
Dünaamiliste
muutmälude
eeliseks on väike hind ja võimsustarve. Neid saab
valmistada väga suure integratsiooniastmega, mis võimaldab toota
suure mälumahuga kiipe. Seepärast ehitatakse arvutite ja
mikroprotsessorsüsteemide suuremad mäluseadmed tavaliselt
dünaamilistest mälukiipidest. Kõigi muutmälude üheks oluliseks
puuduseks on salvestise hävinemine toitepinge väljalülitumisel.
Selle puuduse vältimiseks kasutatakse avariitoidet (katkematu toite
allikaid ) ning muid mäluseadmeid, kus informatsioon säilib teatud
aja ka ilma toitepingeta.
13. Riistvara tegevus alamprogrammide poole pöördumisel.14.Spetsiaalse riistvara realiseerimine.Programne realisatsioon + riistvaraline realisatsioon:
CPU-ga ühendatakse siine mööda mikrokontroller (RAM, ROM, CLK, CPU
+ pordid), selle külge omakorda riistvaraline skeem /
trükkplaat .
Tegevust kontrollib multifunktsionaalne CPU oma programmide ja
algoritmidega, infot edastab spetsiaalne kontroller. Odav,
laiendatav, aeglane, kohmakas. Võimalik ka puhtalt riistvaraline
lahendus --> sellisel juhul
luuakse iseseisev trükkplaat, mis
sobib ainult antud ülesande lahendamiseks.
Ülesande
püstitamine -->
projekteerimine --> mikroskeemi valmistamine
--> Application Specific
Integrated Circuit. Kallis, kiire, sobib
suurte andmekoguste ning ekstremaalsete rakenduskohtade jaoks.
Programmeeritav
loogika: Tehnoloogiad : SRAM tech –
StaticRAM trigerid ühendatakse mux-ga. AntiFuse tech –
programmeeritavad maatriksid, milles saab erinevaid
programme luua,
põletades programmaatoriga maatriksi sõlmedest 'fuse' ühendusi.
metall -amorfne_räni-metall
ühendused .
EPROM tech – Erasable Programmable Read Only Memory – EPROM
transistorid, millel npn-ühenduse
paisu ning pooljuhi vahel on veel teine, nn ujuvpais, mis ei lase
laengul transistorist hajuda, kuid võimaldab andmeid UV-kiirgusega
kustutada .
(näiteks
segmentindikaatori juhtimine püsimäluga --> sisenditeks on
aadressid 1..2..3 etc)
Programmeritavad
maatriksid: PLA – Programmable Logic Array
Enamasti
ei lähe vaja mitme
muutuja Boole 'i funktsiooni muutujate kõigi
kombinatsioonide kasutamist – seega sisaldavad dekoodrid jms
elemendid ülearuseid transistoreid. Konjunktsioone realiseeriv
maatriks + disjunktsioone realiseeriv maatriks. AND-OR-NOT –
f.-
nide süsteemi jaoks. PLA põhimõte – tehakse maatriks, mille
veergudeks sisendelemendid ja nende inversioonid, ridadeks
pingestatud ühendused. Igas sõlmes asub
transistor , mille kollektor
on trükitud äärmiselt peene juhtmena (põleb läbi pingel +2Vh).
Vastava programmaatoriga saab teatud
ühenduskohtades connectionid
läbi põletada ning panna maatriksi väljundina realiseerima mingi
kindla Boole'i funktsiooni DNK-d.
Kasutaja
poolt programmeritavad maatriks- struktuurid : FPGA – Field
Programmable Gate ArrayMaatriks
loogikaelementidest (AND, NOT, OR, ..), mille ümber, maatriks
välimiste elementidena asuvad sisend-väljundblokid.
Luues maskiga?
ühendusi maatriksi sees ning paigutades sisendid-väljundid, saab
skeemi panna realiseerima mistahes Boole'i f.-ni.
Loogikablokid: Look-up Table – mingi register,
SRAM, ROM, whatever, milles on võimalik säilitada seosed sisendite
vahel. Kasutades sisendväärtuste kombinatsiooni aadressina, saab
väljundiks vastava seose LUT-st. Mux-realisatsioon –
andmesisenditeks
loogilised '0' & '1', juhtsisenditeks f.-ni
muutujad. Mux-de ühendused loovad vastavad loogilised seosed.
I/O-blokid – reguleeritakse mux-de ning eripidi
asetsevate dioodidega
FPGA
arhitektuurid: Sümmeetriline – maatriks
Row-based
– ridades
Sea
of gates – loogikablokid tihedalt
üksteise kõrval
HierarhilineFPGA-del
põhineva riistvara programmeerimine :Riistvara
kirjeldus (Boole'i f.-nid) --> Loogiline
optimeerimine &
minimeerimine --> Ülesande jaotamine (Technology mapping) -->
Osaülesannete
paigutus --> Trasseerimine -->
Programmeerimine-konfigureerimine
Programne
lahendus: Odav, aeglane, paindlik.
Kasutusvaldkonnad peamiselt mitte väga nõudlike ning
väikesemahuliste ülesannete juures.
Riistvaraline
realistatsioon trükkplaadina: Kallis,
keerukas, väga kiire, jäik. Sobiv suuremahuliste, andmerohkete ning
ekstreemsetes oludes läbiviidavate ülesannete lahendamise jaoks.
Väikeste tootmismahtude juures hirmkallis. Juba loodud skeemi ei saa
ümber konfigureerida.
PLA:
Paindlik, odav, säästlik, kuna
kasutab optimaalset hulka kristalli pinda. Anti-fuse
tehnoloogia vajab suhteliselt täpset tootmist, muidu võivad tekkida läbilöögid.
Ühe ja sama algmaatriksiga võib eri maskide abil luua erinevaid
skeeme . Väikesemahuline tootmine. Ülesanded, mis vajavad kiiret, ka
ebatavalistesse füüsikalistesse tingimustesse sobivat riistvara.
FPGA: Kaustaja poolt programmeritav.
Paindlik. Kasutab optimaalset hulka kristalli pinda.
15.Virtuaalmälu
(Lehekülgedeks jagamine, segmenteerimine)16. Registrid .On
hulk kokku ühendatud trigereid.
Registrite tüübid =
trigerite tüübid.
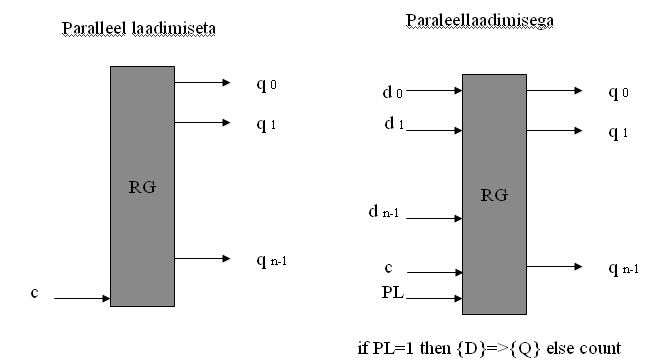
Võimaldab
säilitada infot ühe sõna kaupa. Enamasti 8-, 16-, 24- ja
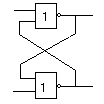
32-bitised registrid (säilitamaks sõnu 1, 2, 3, 4 Bytes).
Nihkeregister
võimaldab infosõnu nihutada vasakule ja paremale, teisendades nii
andmeid järjestik- ja paralleelkuju vahel.
Registrit juhitakse
vastavate trigerite Set Reset käskudega. Nihkeregister RS trigeritel
Clock on kõigil ühtne. Sisend järjestikkujul = Set , selle
inversioon = Reset, i trigeri otseväjund = i+1 Set,
inversioonväljund = i+1 Reset. Paralleellaadimisega nihkeregistrid.
17. Vahemälu ( cache )
organiseerimine: Otsevastavusega , assotsiatiivne ja
kogunassotsiatiivne.Otsevastavusega
vahemälu ( Direct -mapped cache):Üks
lihtsamaid vahemälu organiseerimise viise on otsevastavusega
vahemälu. Info lugemine mälust toimub gruppidena (Line). Mälu on
jagatud segmentideks (Set). Vahemälus on igale grupile oma koht.
Antud näites on iga
segment jagatud neljaks grupiks. Seega on
vahemälus ruumi neljale grupile. Korraga saab vahemälus olla üks
0-s grupp, üks 1-ne grupp, üks 2-ne grupp ja üks 3-s grupp.
Seejuures võib iga grupp olla ükskõik
millisest segmendist.
Korraga ei saa olla aga kahte 0-ndat gruppi, 1-st gruppi, 2-st gruppi
ega 3-ndat gruppi erinevatest segmentidest. Selleks, et oleks
võimalik kindlaks teha millisest segmendist mingi grupp on võetud,
on vahemälus iga segmendi juures vastava segmendi number.
Adresseerimine on lihtne ja ka suhteliselt odav, kuid kui vaja on
näiteks 0-nda grupi infot erinevatest segmentidest, tuleb pidevalt
teha ümberlaadimist. Vahemälu kontroller võrdleb mälu poole
pöördumisel, kas vastava grupi juures on soovitud segmendi number.
Kui on kokkulangemine (hit), siis pöördub protsessor vahemälu
poole. Kui aga ei lange kokku, asendatakse vastav grupp
teisega .
Vajadusel (kui protsessor on antud gruppi midagi kirjutanud)
kopeeritakse asendatav grupp ka põhimällu.
Assotsiatiivne
vahemälu (Associative mapped cache):Assotsiatiivne
vahemälu ei ole jägatud segmentideks. Endiselt on olemas grupid.
Nüüd võib vahemälus olla ükstaskõik milline grupp mälust.
Otsimine vahemälust toimub grupi numbri järgi. Grupid ei ole
järjestatud ja sellepärast kasutatakse assotsistiivmälu. Siin on
vähem vaja
põhimälu poole pöördumisi, kuid mälu ise on kallim.
Otsevastavusega vahemälu korral oli alati teada, milline grupp tuleb
asendada . Assotsitiivse vahemälu puhul tuleb see otsustada
kontrolleril. Kasutusel on terve rida vastandlikke
strateegiaid .
Assotsiatiivse vahemälu uuendamise strateegiad :
LRU
-
Least Recently Used
LFU
–Least Frequently Used
FIFO –First In First Out (kauem olnud andmed välja)
Random
–juhuslik
Alati
peab olema tagatud, et kui protsessor on infot vahemälus muutnud,
siis jõuaks vastav muutus ka põhimällu. Vahemälu peab olema
põhimälu koopia. Kasutusel on kaks erinevat strateegiat. Andmete
kirjutamine vahemälust põhimällu :
Write-
through ,
korraga muutused kirjutada vahemällu ja põhimälu (486)
Write-
back ,
kirjutatakse põhimällu vahemälu grupi asendamisel.
Näide: Line on 16
baiti s.o. neli 32 bitist sõna. Mälu on 1 Mb ja seega
koosneb 64 K linest.
Cache
koosneb 4096-st linest. Et laetud cachesse võib olla laetud
ükstaskõik milline 64 K lineston tag 16
bitine .
Kogumassotsiatiivne
vahemälu (Set associative-mapped cache):Set
associative-mapped cache –
kompromiss direct-mapped ja täielikult
associative cache vahel.
18.Puutetundlikud
ekraanid.Takistusel
põhinev: ekraani peal kilekiht,
millel takistitega maatriks. Selle peal teine kile. Vajutus
ekraanile muudab maatriksi mingi elemendi takistust: ridade ja veergude pingete
skaneerimisega on võimalik kindlaks teha, kuhu vajutati. Alalisvool.
Mahtuvusel
põhinev: Ekraani igas
nurgas on
vahelduvvool. Kui asetada sõrm vastu monoliitset klaasist
ekraanipinda, muutub selle
mahtuvus . Nurkade kaudu mahtuvusi
arvutades ja trianguleerides, saab leida vajutuskoha koordinaadid.
19.Käsu täitmine
protsessoris.e.
von Neumanni tsükkel .
käsukoodi laadimine (käsuloendurisse)
käsuleonduri modifitseerimine: PC:=PC+1
käsu aadress mälu aadressiregistrisse + read
mälupesa sisu mälu puhverregistrisse
mälu puhverregistrist kood käsuregistrisse + ALU-sse
Käsukoodi dekodeerimine
käsu täitmine
juhtautomaadi sisendid, mille käsudekooder aktiveeris
ALU seadistamine
20.Kombinatsioonskeemid
ja järjestikskeemid.
Kombinatsioonskeem:
digitaalskeem, milles, teades sisendite väärtusi, võime väljundid
välja arvutada üheselt, väljundid on määratud üks-üheselt
sisendite väärtustega.
Järjestikskeem:
digitaalskeem, milles väljundi väärtus sõltub eelmistest,
eelnevatel diskreetse aja hetkedel I/O-s olnud väärtustest –
skeemil on mäluolek.
Positiivne
vs negatiivne loogika. Täielikult vs mittetäielikult määratud
Boole'i funktsioonid<
Enamkasutatavaid järjestikskeeme
21. Juhtautomaat :
Osa käsu täitmisel ja realiseerimine.
Juhtautomaat
kujutab endast käsu täitmise algoritmi riistvaralist realisatsiooni
loogikaskeemina. Peale üldosa vastab igale käsule , mida protsessor
on võimeline täitma (kuulub tema käsusüsteemi), algoritmis oma
haru. Käsu dekodeerimise järgi toimub mikroprogrammis hargnemine .Selle hargnemise realiseerimiseks peab juhtautomaati tulema käsudekoodrist info selle kohta, milline on täitmisele tulev
käsk. Mõnede käskude täitmisel on vaja realiseerida
mikroprogrammis hargnemisi, mis sõltuvad protsessori mõne teise osa
seisundist. Näiteks on vaja teada korrutamise realiseerimisel liitmise ja nihutamise abil eelneva ALU operatsiooni tulemuse
võrdumist nulliga.
Põhimõtteliselt
on juhtautomaadi realiseerimiseks kaks võimalust:
1)
jäiga loogikaga juhtautomaat:
Jäiga loogika korral realiseeritakse algoritm loogikaskeemina
kristalli pinnal ja iga muutus käsusüsteemis tähendab uue loogikaskeemi realiseerimist.
2) püsimälus säilitatava mikroprogrammiga juhtautomaat: Kui
mikroprogrammi hoitakse püsimälus (näiteks Flash ), siis saab
käsusüsteemis teha muudatusi ilma uut loogikaskeemi koostamatta.
Kogu mikroprogrammi täitmine taandub sõnade lugemisele
mikroprogrammi sisaldavast püsimälust. Mingil määral toimib see
analoogiliselt programmi täitmisega protsessoris.
22.Mikroskeemide
valmistamise tehnoloogiad.
Bipolaarsed
tehnoloogiad:
dioodloogika:
kokku ühendatud n-p pooljuhid lüliti avatud, kui vool kulgeb noole suunas. Väljundvoolu hergnevustegur – dioodide arv loogikaskeemis
piiratud, kuna vastasel juhul võib ühte dioodi hakata läbima liiga
suur vool ... summa eelnenud dioodidest * I ... vana, ei kasutata
TTL
– Transistor-Transistor Loogika: bipolaarne transistor ... npn =
emitter- base - collector ja pnp = emitter-base-collector ... viimane on
negatiivse loogika näide (invertor)
kolme
olekuga väljund: Enabled+x1+x2. Kui E=0, f=?
väiksema
energitarbega & kiirem kui eelmine
STTL
– Shotky TTL ... lisatud Shotky diood , kiire lülitumisega
IIL
– Integrated Injection Logics ... suhteliselt madalam töökiirus,
suurim elemenditihedus.. TTL modifikatsioon , milles kahe transistori
pnpnp osad kokku ühendet
ECL
– Emitter-Coupled Logic ... väga kiire bipolaartransistoritel
põhinev loogika
Pooljuhtide tehnoloogia: MOS – Metal Oxide Semiconductor
n(channel)MOS
transistor: pnp poljuhid, p-p
pooljuhtide vahele tekib voolu juhtiv kanal, mis suleb transistori,
kui pinge n-pooljuhi kohal = +V = H
p(channel)MOS
transistor: npn pooljuhid, sama
lugu, ainult nüüd asub gate p- pooljuhi kohal
CMOS
– Complementary MOS ... kiire, voolutarve vaid lülitumishetkel
MOS
on unipolaarne, energiatarve väike, suhteliselt aeglasem , kuid
võimaldab suurt pakkimistihedust
23.Pooljuhtmälud.
Jagunevad
kaheks:
Staatiline pooljuht -suvapöördusmälu:
Koosneb
trigeritest vm positiivse tagasisidega elementidest. Andmed hävivad
toite kadumisel. Kasutatakse protsessoris töötsüklite ajal
vajaminevate andmete säilitamiseks. Chip, millel aadressisisend,
data väljund ning ChipSelect, OutputEnabled ning Read/Write
väljundid.
Dünaamiline pooljuht-suvapöördusmälu:
Koosneb
mälumaatriksist, milles küljes rea aadressi ning veeru aadressi
puhvrid. RowAddressSelect ning ColumnAddressSelect sisendid, R/W
sisend. Andmed tuleb mingi aja jooksul refreshida, vastasel juhul
imbub laeng transistoritest välja & andmed hävivad.
FastPageMode DRAM – mälus järjestikku paiknevad andmed paiknevad mälumaatriksi
aktiveeritud rea järjestikustes veergudes.
ExtendedDataOutput
DRAM – väljundis olev puhver lubab alustada uut pöördumist enne
eelmise lõppu
Synchronous
DRAM – jaguneb mitmeks pangaks, milledes saab iseseisvalt infot
refreshida, sünkroonne süsteemi kellaga, genereerib ise
järjestikused aadressid
Rambus
DRAM – multibank DRAM + liideslülitus, edastab infot nii esi kui
tagafrondist, kiire
Content
Adressable Memory, CAM – assotsiatiivmälu
Double
Data Rate DRAM – edastab infot nii esi kui tagafrondist
SIMM
– 72 klemmi
DIMM
– 168 klemm
24.RAID ja SSD
kettad.
25. Analoog ja digital info. Analoog liides (DAC, ADC)
Lained
(võnked) ja elektromagnetväljad on analoogkujul, st. nad on
sujuvate võngete pidevad signaalid . Lained vees, helid, valgus,
elektromagnetism ja praktiliselt ka kõik muu, millega puutume kokku
looduses, on analoogkujul. Samuti ka elektrivool. Kõige moodsamad
elektroonikakomponendid on digitaalsed, mis tähendab, et kogu
töödeldav informatsioon on esitatud numbrite abil.
Digitaalelektroonika väljendab kõiki väärtuse muutusi
diskreetsete sammude mitte sujuvate võngetega.
Digitaal -analoog
konverter – muudab kahendkoodis
signaali pidevaks analoogsignaaliks. Paralleelkujul ülekantava
signaali jaoks näiteks pingete summaator, mille abil saab määrata,
kui mitu 'ühte' on antud signaalis. Või siis analoogimine, milles
igas järgus paiknevale ühele antakse kindel pingenivoo (teistest
suhteliselt erinev) ning pingete summeerimisega on võimalik määrata
mistahes kood.
Analoog-digitaal
muundur: analoogsignaal lastakse
läbi mitme erineva takistusega dioodi. Vastavalt sellele, kui mitu
dioodi on jõudnud diskreetimisel pingenivoole '1', leitakse
koodimuunduris kahendkood. Pingete analüsaator .
Temperatuuriandur:
Termopaar + ADC.. vastavalt termovoolu tugevusele.
Luksmeeter:
pingeallikas + fotodiood + ADC .. vastavalt dioodi takistuse
suurenemisele.
Spidomeeter:
pöörlemisteljele on hulknurgakujuliselt paigutatud piesokristallid,
nende deformatsiooni tõttu tekkinud elektriväli mõõdetakse ning
läbi komparaatori leitakse selle väärtus.
26. Optilised mäluseadmed.
Info
salvestamisel kasutatakse peegelduvat materjali, milles on augud
(süvendid). Rada on CD-ROM-l spiraali kujuline (mitte
kontsentrilised ringid nagu kõvakettal). Lugeva laseri
positsioneerimine on analoogiline kõvaketta peade
positsioneerimisega. Peegeldunud laseri kiir teisendatakse
elektriliseks signaaliks
Süvendi
sügavus on ¼ lainepikkusest. Kui laseri kiirest osa peegeldub ketta pinnalt ja osa süvendist, siis läbib süvendist peegeldunud kiir
kaks korda ¼ lainepikkuse võrra pikema tee. Seega on need kaks osa
kiirest nüüd vastas faasis ja kompenseerivad teineteist. Seega
tuntakse ära mitte süvendid vaid hoopis üleminekud. Salvestamisel
kasutatakse spetsiaalset 14 bitist koodi kus ei ole kunagi kõrvuti
kahte ühte. Kuivõrd üleminek vastab ühele ei ole neid võimalik
ka kõrvuti teha. Koodis on kahe ühe vahel vähemalt kaks nulli.
Selleks, et kahe kõrvuti oleva koodid ei oleks lubamatult lähestikku
on iga koodi vahel kolm bitti eraldajat. Laserit kasutatakse valgus
allikana sellepärast, et laseri valgus on monokroomne ja kogu
allikast lähtuv valgus pean olema samas faasis.
CD-R
Sarnaneb ehituselt CD-ROM-ile, kuid põhimiku ja metallikihi vahel on
valgustundlikust orgaanilisest materjalist (tsüaniin või seda
sisaldavad segud) andmekiht. Põhimikku on pressitud pidev
spiraalvagu, mille järgi kirjutav seade hiljem kirjutuslaserit
positsioneerib (kirjutamiseks kasutatakse kõrge intensiiivsusega
laserkiirt). Kirjutamisel tekitatakse vagudevahelisele alale “lohke”.
Need ei ole tegelikult lohud, vaid materjali kerge sulatamisega
mittepeegeldavaks muudetud piirkonnad, mida CD- seadme laser peab
lohkudeks.
CD-RW
andmekihi pind koosneb erilistest keemilistest komponentidest, mis
võivad oma olekut korduvalt muuta ja säilitada, sõltuvalt
temperatuurist. Materjali kuumutamisel ühe temperatuuriga ja
seejärel jahutades, aine kristalliseerub ning teise temperatuuriga
kuumutades, võtab aine mittekristalliseerunud oleku. Kui aine on kristalliseerunud , peegeldab ta rohkem valgust kui
mittekristalliseerunult, seega saab kristalliseerunud pinda kasutada
kui põhipinda "land" ja mittekristalliseerunud kohta
lohuna "pit". Seega peab CD-RW seade kasutama
korduvkirjutamisel kahte erinevat laserikiire võimsust.
27.Võrdlusskeem.
Võrdluskeem
ehk komparaator , näitab operantide
suuruse suhte. Lihtsalt võrdleb kahte arvu, kumb on suurem, või on
hoopis võrdsed arv A on a1a0, arv B on b1b0, kui A ,kui
A > B, siis G=1
,kui
L=G=0, siis A=B
28.Analoog ja
digital info. Helikaart.
Iga
helikaardi aluseks on digitaalanaloogmuundur (DAC- Digital
to Analog Converter), mis
arvuti poolt digitaalsel kujul saadetava info kindla algoritmi järgi
madalsagedusvõnkumisteks (helisagedusteks) muudab. Just temast
sõltub otseselt taasesitatava heli kvaliteet. Helikaardi andmetes
alati leiduv bittide arv (bit
rate, bit depth) näitab
tegelikult DACi poolt kasutatava "sõna" pikkust. Mida
rohkem bitte, seda loomulikuma esituse saame.
Loomulik
heli -(ja ka video-) signaal on analoogsignaal, mis tuleb kõigepealt viia digitaalkujule (digiteerida). Selleks kasutatakse analoogmuutuja
muutumispiirkonna jagamist lõplikuks arvuks vahemikeks, millest
igaühele omistatakse kindel numbriline väärtus
29. Magnetmälu seadmed.
Magnetiline
info salvestus põhineb magnet materjali magnetiseerimises ünes või
teises suunas. Selleks kasutatakse lugemis/ kirjutamis pead, mis on
magnetmaterjalist ja mille peal on mähis. Juhtides mähisesse voolu
ühes või teises suunas tekib ka vastava suunaline magnetväli.
Magnet jõujooned kaarduvad materjalist välja sinna tehtud pilu
kohal mis aga omakorda on salvestus materjali lähedal. Lugumisel aga
indutseerib magnetvälja muutus mähises impulsse. Vool
indutseeritakse selles kohas, kus toimub üleminek magneetimise ühelt suunalt teisele ja voolu suund sõltub sellest milises suunas on
magnetvälja üleminek
30. Klaviatuur .
Klaviatuuri kõikide klahvide all on lülitid . Lülitid võivad olla kontaktidega
või kontaktivabad. Kontaktide puhul on oluline vältida mustuse
sattumist kontaktide vahele. Väga laialt on levinud klaviatuurid kus
kasitatakse metaliseerirud plastmassist kilet mis täidab ühtlasi ka
vedru ülesannnet. Klaviatuur moodustab maatriksi kus read on
ühendatud väljund pordi külge. See tähendab, et klaviatuuri
kontroller saadab sinna teatud skaneerimise koode. Veerud on
ühendatud läbi kaitsva takisti toite nivooga (väärtus 1) ja
samuti saab lugeda veergude väärtusi läbe sisend pordi klaviatuuri
kontrollerisse. Kõigis horisotaalide ja vertikaalide
ristumiskohtades on lülitid (klahvid). Iga lüliti küljes on klahv
vastava numbri või tähega . Scan koodi saamiseks saadetakse
vertikaal liinidel kood kus on väärtus 0 ainult esimesel ülemisel
vertikaalil. Kõikidel teistel horisotaalidel on väärtuseks 1-d.
Kui nüüd on mõni ülemise horisotaali klahv alla vajutatud, siis
on ka vastaval vertikaalil väärtus 0. Kõigil neil vertikaalidel
kus klahv ei ole alla vajutatud on väärtus üks. Kui alla on
vajutatud klahv mõnel teisel horisontaalil, kus on väljund pordi
kaudu väärtus üks, siis ei mõjuta nad vertikaali väärtust.
Järgmiseks saadetakse horisontaalidele kood kus on järgmisel liinil
null ja kõik ülejäänud ühed. Sellega kontrollitakse kas
järgmisel horisontaalil on mõni klahv vajutatud. Sellisel moel
kontrollitakse järjest kõiki horisomtaale. Kui on jõutud
viimasele, siis algab protsess otsast peale. Teades horisontaalile
väljastatud koodi ja vertikaalidelt loetud koodi saab kindlaks teha
milline klahv on alla vajutatud. See ongi scan kood. Kui korraga on
mõnel horisontaalil alla vajutatud rohkem kui üks klahv on ka
vertikaalidel rohkem kui ühes järgus null. Valitakse välja neist
üks ja vastav kood saadetakse protsessorisse. Kui see oli vale klahv
siis selle parandamine on juba klaviatuuri kasutaja asi.
31.Mälu
organiseerimine:Koostamine mitmest moodulist ja
vaheldamine(Interleaving)
32.Erineva
pöördus viisiga mälud : FILO, FIFO, assotsiatiivmälu, kahe pordiga
mälu.
Pinumälu -
LIFO e. “last in, first out”. registrisse viimasena kantud andmed
saab esimesena välja Realiseeritud
nihkeregistrite põhimõttel
Puhvermälu -
FIFO e. “first in, first out”. registrisse esimesena kantud
andmed saab esimesena välja.
Assotsiatiivmälu -
“Content-Adressable Memory” – CAM, võimaldab ( üli )kiire
otsimise. Erinevalt RAM'ist, kus antakse mälu aadress ja saadakse
sisu; Siis assotsiatiivmälu puhul antakse sõne, CAM otsib oma kogu
mälust, kas otsitavat sõne seal leidub. Kui leidub, tagastatakse loetelu , kust sõne leiti.
Kahe
pordiga mälu – lugemine ja
kirjutamine samaaegselt, ntx videomälu
33.Siirete( hargnemiste )
ennustamine. (Branch Prediction) Protsessorites
on tihti eraldi loogikaskeem mis tegeleb hargnemiste
ennustamisega, et
muuta konveier efektiivsemaks. Hargnemise ennustamine toimub teatud
statistiliste kriteeriumite järgi ja ei saa anda alati õiget
tulemust, kuid siiski suudab vähendada konveieri uuesti käivitamise
vajaduse tõenäosust.
Ennustamisel
saadakse tõenäosus, et järgmine käsk tuleb siirdekäsk ..
reaalsuses vastab ennustusele sündmus 'järgmine käsk' (PC+1). Neli
varianti:
siiret
eeldati & see tuli --> T
siiret
eeldati & seda ei tulnud --> F
siiret
ei eeldatud & see tuli --> F
siiret
ei eeldatud & seda ei tulnud --> T
34.Andmeedastus
juhtimise süsteemid katkestustega ja ilma, prioriteedid .
Passiivne andmevahetus – I/O seadmete
prioriteetide probleem lahendatakse korrapäraselt mux-'de kaudu.
Seadme käest loetakse olekusõna ning järjestatakse andmevahetuseks
... polling.
Staatiline
vs dünaamiline prioriteetide jaotamine
Katkestustega
süsteem – katkestus = pöördumine
alamprogrammi poole
CPU
lõpetab poolelioleva käsu, PC ( process count) & PSW (process status word) pinumällu. PC-sse AP I käsk.
Polling
+ Interrupt – programne
katkestuste lahendamine
Daisy chain – prioriteedid paika pandud
riistvaraliselt (jäigalt) füüsilise asetusega
Interrupt
controller – olekuregistris oleva
juhtsõnaga saab prioriteete juhtida
Andmevahetus
otsepöördusrezhiimis – Direct
Memory Access
request
data transfer (peripeheral) --> request DMA cycle (DMA controller)
--> grant DMA cycle (CPU) --> grant data transfer (DMA
controller) ---> transfer data (peripeheral)
DMA
tsükli ajal on CPU olekus HALT.
Cycle
stealing – DMA controller &
CPU teevad siinitsüklid vaheldumisi .
35. Katkestused arvutis (Interrupt).
Arvutid
kasutavad katkestusi (interrupts) mitmesugusteks ülesanneteks.
Näiteks kui te vajutate mingile klahvile, saadab
klaviatuuriprotsessor põhiprotsessorile ühe katkestuse . Katkestus
on signaal, mis sunnib põhiprotsessorit oma tööd hetkeks
katkestama ja täitma mingit muud ülesannet. Selleks salvestab
protsessor oma hetkelise töö jätkamiseks vajalikud andmed ja asub
seejärel sellele katkestusele vastavat ülesannet täitma. Mälu
alguses, esimeses 1024 baidis asub tabel, mis sisaldab pikki viitasid
iga katkestuse puhul täidetavale funktsioonile. Iga sissekanne sellesse tabelisse sisaldab 4 baiti (pika viida suurus). Seega
sisaldab tabel täpselt 256 sissekannet. Kui te nüüd vajutasite
näiteks mingile klahvile, siis katkestab protsessor oma hetkelise
töö ja täidab sellele katkestusele (katkestus number 9) vastava
ülesande. Selleks hangib ta katkestuste tabelist vastava (üheksanda)
sissekande ja jätkab tööd sellelt aadressilt. Nimetatud aadressil
asub tavaliselt operatsioonisüsteemi või BIOSi funktsioon, mis
uurib järele, millisele klahvile vajutati ja väljastab vastava
sümboli ekraanile. Peale selle funktsiooni täitmist jätkab
protsessor oma endist tööd.
Katkestused
on jaotatud järgmistesse gruppidesse:
Katkestused:
0 - 15 -
Need katkestused kutsutakse välja arvuti poolt. Sellesse gruppi
kuuluvad klaviatuuri ja muude seadmete jaoks vajalikud katkestused,
ning mitmed süsteemi enda jaoks vajalikud katkestused. Süsteem omab
iga sellise katkestuse jaoks sobiva BIOSi funktsiooni, mis on kõik
salvestatud arvuti ROM -is. Operatsioonisüsteem (DOS) asendab sageli
osa neist funktsioonidest oma funktsioonidega arvuti töö
kontrollimiseks. Ka programm võib osa neist funktsioonidest asendada
enda poolt loodutega .
Katkestused:
16 - 31 -
Neid katkestusi kasutavad nii operatsioonisüsteem kui ka programm
mitmesuguste seadmete (näiteks ekraani) kasutamiseks. Igale
sellisele katkestusele vastab üks BIOSi funktsioon.
Katketused:
32 - 63 -
Neid katkestusi kasutab operatsioonisüsteem. Programmid võivad
nende katkestuste kaudu kasutada operatsioonisüsteemi funktsioone,
näiteks failide avamiseks ja lugemiseks.
Katketused:
64 - 95 -
Neid katkestusi kasutavad operatsioonisüsteem ja mitmed
ohjurprogrammid oma ülesannete täitmiseks. Igale katkestusele
vastab kas üks BIOSi või mingi ohjurprogrammi funktsioon.
Katkestused:
96 - 102 -
Need katketused on reserveeritud programmide jaoks. Kuidas programmid
neid kasutavad, ei ole kindlaks määratud.
Katkestus:
103 -
111 Seda katkestust kasutab
laiendatud mälu ohjurprogramm.
Katketused:
112 - 119 -
Neid katketusi kasutavad ohjurprogrammid
Katkestused:
128 - 240 -
Neid katkestusi kasutab teie arvuti
ROM -is salvestatud programmeerimiskeel BASIC , kui teie arvuti ROM
üldse sisaldab keelt BASIC.
Katkestused:
241 - 255 -
Neid katkestusi esialgu ei kasutata.
Võibolla omistatakse neile mingi tähendus tulevikus.
36.Mälude klassifikatsioon .
37.RISC ja CISC protsessorid, mikroprogramm .
RISC
– Reduced Instruction Set Computer
Vähe
käske. Kiire. Interpreteeriv mikroprogramm puudub, käsk läheb kohe
täitmisele. kiirem käsutäitmine (paralleelselt). fix käsuformaat
– käsu lihtsam dekodeerimine. mälu poole ainult LOAD & STORE
käsud (ühes käsus 3 registeraadressi). võimas registermälu.
efektiivne andmevahetus alamprogrammidega. efektiivne siirdekäskude
ja alamprogrammide juhtimine. lihtsad käsud
CISC
– Complex Instruction Set Computer
Palju
käske. Aeglane. Interpretaatori rolli täidab kristalli pinnal
realiseeritud mikroprogramm.
~
1 CISC-käsk = 5 RISC käsku
Tavaliselt
on reaalsetes protsessorites RISC & CISC ideoloogia
paralleelselt.
38. Protsessori
üldstruktuur( Käsuloendur , käsuregister, käsudekooder,
juhtautomaat, operatsiooniautomaat)
Protsessor teostab mitmesuguseid operatsioone mälus paiknevate käskude järgi.
Protsessori koosseisu kuulub ALU, juhtautomaat-mikroprogrammautomaat,
mitu registrit ning vahemälu. Käsuloenduri
ülesandeks on järjestikuste käskude lugemine PC aadressi järgi.
Käsuloendur saab järgneva käsu aadressi ???-st (juhtautomaadist
arvatavasti ... või siis programmistilt). Saadab Read signaali ja
mälu aadressi Mäluaadressi Registrisse, kus selle järgi leitakse
mälust vastav pesa ja kirjutatakse selle sisu Mälu
Puhverregistrisse, sealt omakorda käsukood ning operand(id)
käsuregisreisse. Mälust saadud käsk säilitatakse käsuregistris
kuni käsudekooder
selle identifitseerib. Käsudekoodrist liigub vastavast väljundist
signaal juhtautomaati.
Juhtautomaat saadab juhtsignaalid operatsiooniautomaati.
Operatsiooniautomaat loeb nõutud andmed oma suurde registermälusse
ning saadab andmed ALU-sse, mis juhtautomaadi käskude järgi teeb
vastavad tehted . Lippude register saadab samuti operande ALU-sse.
Siirdekäsk
– käsk, mis nihutab käsuleonduri
aadressile, mis ei oleks olnud loenduri loomulik järgmine aadress.
Käsuleondur
- Loendur, mis väärtustatakse
teatud algtingimustega ja mida juhib programmist oma siirdekäskudega.
Ülejäänud CPU töötab automaatselt.
Juhtautomaat:
käsukood --> mikrokäsu aasressi register ---> mikroprogrammi
mälu --> mikroprogrammi täitmine --> järgmise mikrokäsu
aadress mikrokäsu aadressi registrisse / protsessori teiste osade
juhtimine.
Sisendid,
väljundid, olekud, üleminekud
Mealy automaat : väljundfunktsioon sõltub
nii olekutest kui sisenditest
Moore'i
automaat: väljundf.-n sõltub
ainult olekust. algolek = lõppolek
operaatorsõlm
– milles sooritatakse mingi
tegevus
tingimuslik
sõlm – hargnemine
Jäiga
loogikaga juhtautomaat – milles
algoritmi säilitatakse püsimälus
39.Aritmeetika .
Loogika seade (ALU)
Aritmeetika-Loogikaseadme
ülesandeks on mitmekohaliste kahendarvudega erinevate aritmeetiliste
ja loogiliste tehete tegemine. Tehe , mida teha, määratakse
juhtsisenditega, operandid andmesisenditega. Iga järgu jaoks
arvutatakse väljundi väärtus iseseisvalt.
Sõltumata
arvuti ja protsessori ehitusest on arvutis alati üks skeemiosa, kus
teostatakse otsesed arvutustehted ja muu infotöötlus - nimelt
aritmeetika-loogikaseade ehk ALU (Arithmetical and Logical Unit). Eri
protsessoritel on üldiselt erinev tehete hulk ja valik, kuid
tavaliselt hõlmab see aritmeetilisi (minimaalselt liitmine ja
lahutamine) ning loogilisi tehteid (JA, VÕI, EITUS ) ja
nihutusoperatsioone (kahendarvu bitid nihutatakse oma senise
positsiooni suhtes kas vasakule või paremale).
40. Printer ja
värvitrükk.
Printer
- Perifeeriaseade
arvutist tulevate andmete trükkimiseks mingile maisele kandjale.
maatriksprinter
(Dot matrix printer)
(Nõelprinter,
mille prindipea sisaldab üht või kaht rida nõelu, millest
moodustatakse tähekujundeid ja siis surutakse läbi tindiga immutatud lindi vastu paberit. Prindipea prindib rea algusest lõpuni,
seejärel järgmise rea jne. Mida rohkem on nõelu, seda suurem on
printeri eraldusvõime. Näit. 9 nõelaga saab mustandikvaliteedi ja
24 nõelaga kirjutusmasinakvaliteedi. Printimiskiirused ulatuvad 200
kuni 400 tähemärgini sekundis, mis vastab 90 kuni 180 reale minutis ). Kõgi löökprinterite juures
tekitatakse kujund paberile löögiga läbi värvilindi (tindiga
immutatud kangas ). Erinevus on selles kuidas ja millega teostatakse
löök. Kõige levinum om maatriksprinter kus vastu värvilinti mille
taga on paber lüüakse trüki peas olevate nõeltega. Peas võib
nõelu olla parematel printeritel kuni 24. Kõiki nõelu saab juhtida
solenoididega. Kui printeri juhtseade tekitab solenoidis voolu
impulsi lööb vastav nõel vastu värvilinti mis tekitab omakorda
emda taga olevale paberilepunkti. Selline odav aga lärmakas printer
võimaldab trükkida ka lihtsamat punktidest koosnevat graafikat.
Varem enimlevinud prontereid kasutatakse veel vaid seal kus on vaja
saada prinditust ka kopeerpaberi koopia (näiteks maksekorraldused
pankades).
laserprinter
(Laser Printer)
Laserprinter
töö põhineb seleen trumlil. Seleen on pooljuht materjal mis
valguse toimel muutub juhiks. Trummel laetakse kõrgepingega (1).
Edasi mõjutatakse trumli pinda valgusega (2). Valguse allikaks on
laserprinteris laser ja koopiamasinas originaali peegeldus. Need
kohad mis saavad rohkemvalgust muutuvad rohkem juhiks ja neilt kaob
ka laeng. Nüüd pöörleb trummel edasi ja läheneb toonrile (3).
Need kohad mis on rohkem laetud tõmbavad rohkem toonerit külge ja
need mis said rohkem valgust ja on vähem laetud vähem. Seega
moodustub toonerist trumlile kujund. Koopiamasinal on ta vastavalt
peggeldusele aga pronteris koosneb punktidest. Seejärel surutakse
trummel vastu puhast paberit (4). Edasi kuumutatakse tooner paberile
(5) ja trummel puhastatakse toonerist (6). Seega laser on printeris
ainult valguse allikas.
jugaprinter
(Inkjet Printer)
tindiprits -printer.
Idee meenutab natuke maariksprinerit ainult siin ei lööda trüki
peas olevate nõeltega värvilinti vaid peas on pihustid millest
pritsitakse paberile värvaine täppe. Pihusteid sisaldav trükipea
liigub horisintaalselt paberi läheduses. Vertukaalne liikumine
saadakse paberi kerimisega. Neist värvaine täppidest moodustatakse
kujund. Suhteliselt lihtne on saada värvilist trükki .
Pihustamiseks
on kaks võimalust:
- Piesokristalli pihusti mõjutatakse vooluga mille tulemusena ta muudab oma kuju ja paiskab tindi täpi pihustist väja.
- Trükipeas on takisti mis voolu impulsi toimel kiiresti kuumeneb ja paiskab paisunud tindi tilga pihustist paberile.
Viimasel
meetodil on see hea omadus, et kuumenenud tint kuivab kiiremini.
värviprinterid
Priterites
ei ole kasutatav RGB süsteem mis monitoride puhul võimaldas värve
liita. Põhjuseks on see, et paber ei ole aktiivne valgusallikas nagu
kuvari elektronkiire toru ja taust on valge mitte must. Valge värv
teatavast peegeldav kõiki värvusi. Kasutatkse kolme värvi:•CYAN
mis peegeldab kõiki värvusi peale punase.•MAGENTA mis peegeldab
kõiki värvusi peale rohelise.• YELLOW mis peegeldab kõiki värvusi
peale sinise.Kõigi nende kolme värvi summa peaks andma musta, kuid
must ei ole eriti kvaliteetne. Arvestades, et silm on musta
kvaliteedi suhtes vägatundlik on lisatud eraldi ka msut värv
– blacK . Kokku saadaksegi värvisüsteem CMYK mida pronterites
kasutatakse.
Õisprinter:
ümmargune printpea, mille küljes ASCII märgid, pea pööratakse
õigesse asendisse ning antakse impulss vastavale märgile, mis lööb
läbi trükilindi jälje paberile.
Pallprinter:
sfääriline printpea, mis pööratakse ümber rotating telje ja
tilting telje vastava märgiga kohani ja lüüakse siis läbi
trükilindi paberile.
Tindiprits:
tindianumast pumbatakse tint peenesse torusse, kust lennutatakse see
tilkade kaupa välja. Lennutajaks on piesokristall, mis
elektriimpulsile reageerib deformatsiooniga. Väljalennanud tindtilk
juhtakse horisontaalsete ning vertikaalsete laetud plaatidega õige
kohani paberil .
41. Koodimuundur .
On
loogikaskeem, mis teisendab sisendkoodi mingisse teise loogikasse.
Näiteks positiivsest loogikast negatiivsesse loogikasse inversiooni
läbi. Binary-Decimal.
Igale
sisendjärgule vastab loogikaskeem, mis toimetab teisenduse .
42.Veakindlad
koodid.





































Kõik kommentaarid