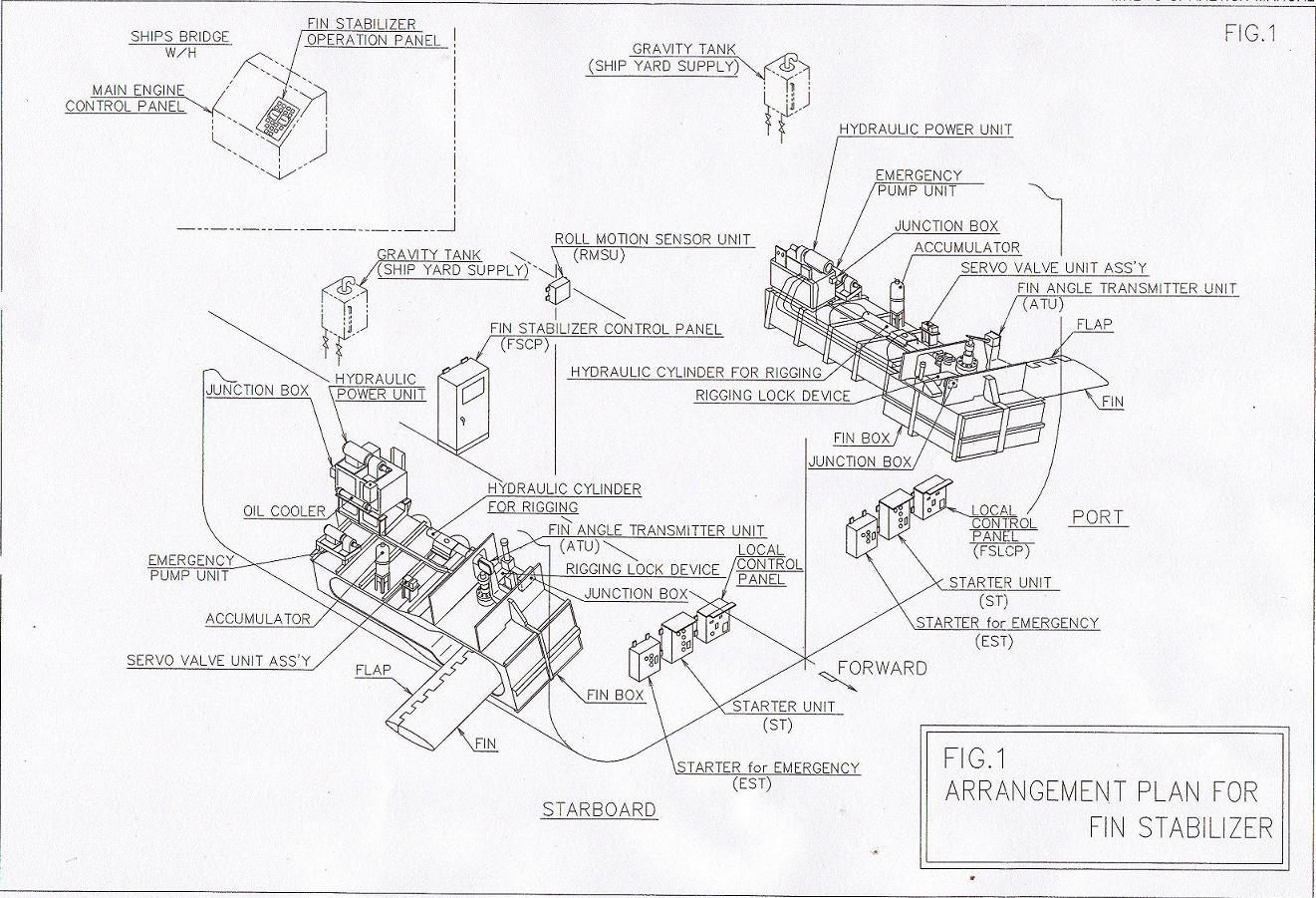
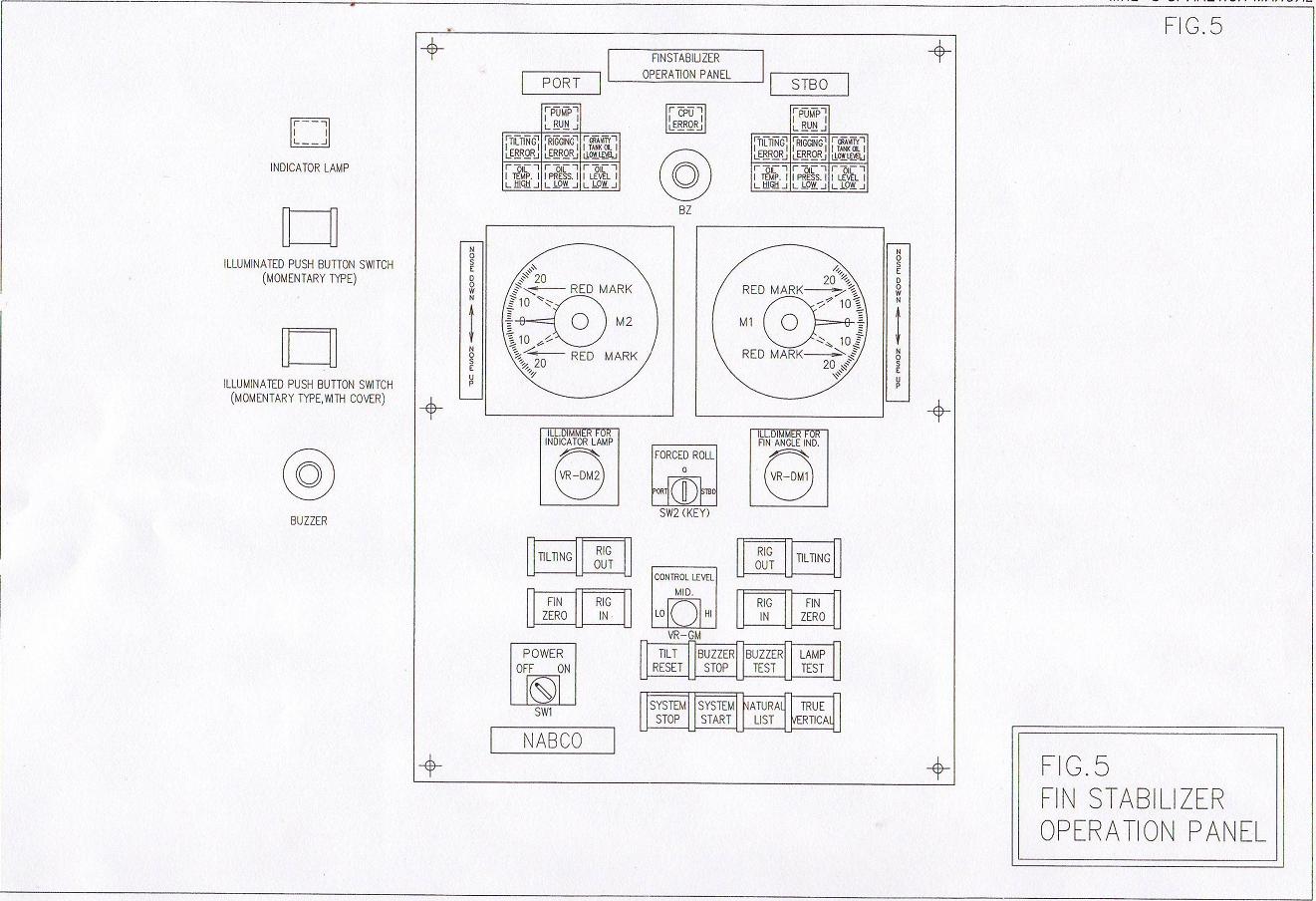
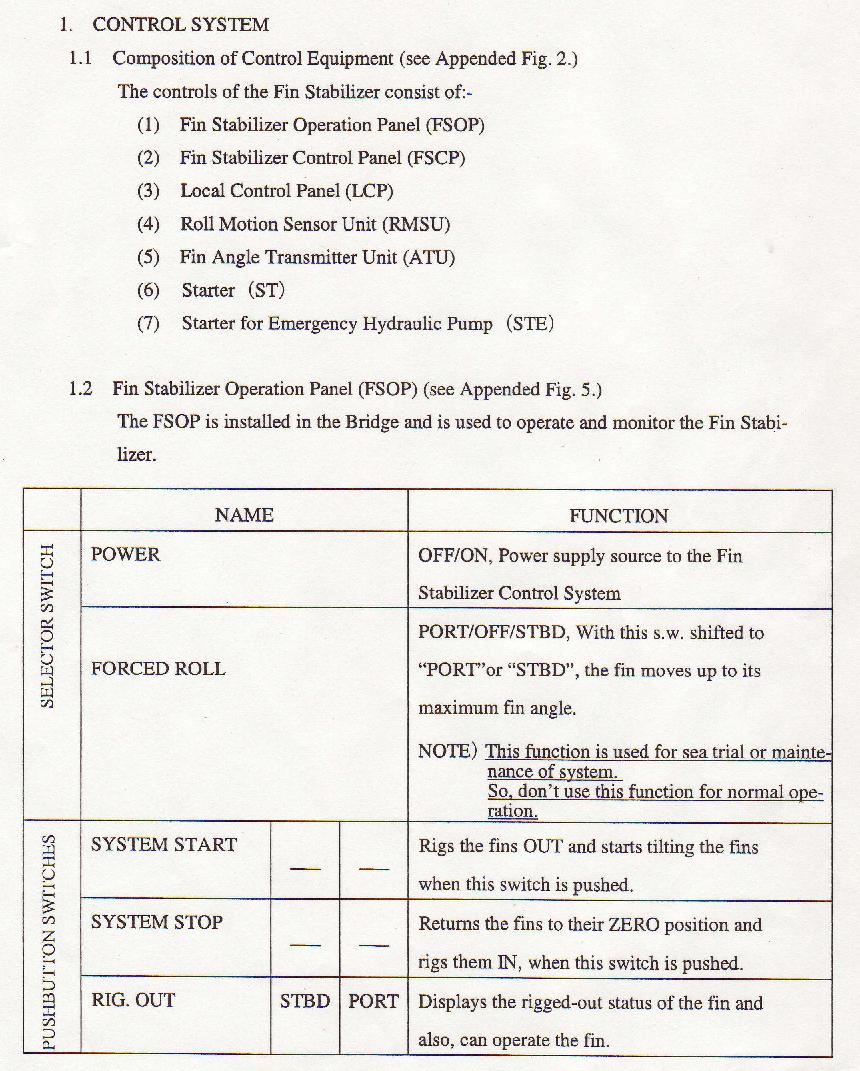
EESTI MEREAKADEEMIA Laevandusteaduskond
TÜÜRIMEES
MEREPRAKTIKA ARUANNE
Victoria I Praktikakoht
24.04.2007 23.04.2009 Praktika algus ja lõpp
Õppegrupp: LL- 41
Juhendas:
Rein Raudsalu
TALLINN 2009
Retsensioonid2 Sisukord
LAEVA ANDMED,
VAHITEENISTUS , LASTIKÄSITLUS, PÜSTUVUS, MEREPRAKTIKA
.........................................................................................................................................................5 Üldandmed ..................................................................................................................................5 Joonised .......................................................................................................................................7 Vahitüürimehe vastutus navigatsioonivahis ..............................................................................12 Hea merepraktika navigatsioonivahis....................................................................................12
Peamasin ................................................................................................................................12 Stabilisaatorite kasutamine ....................................................................................................12 Navigatsiooniaparatuuri perioodilised kontrollid ..................................................................12 Navigatsiooniaparatuuri igapäevased testid ..........................................................................13 Autopiloot ..............................................................................................................................13 Visuaalne
vaatlus ...................................................................................................................13
Kapteni kutsumine .................................................................................................................13 Informatsioon vahikoosseisule ..............................................................................................14 Search and Rescue .................................................................................................................14 Laeva süvis ning muu informatsioon ....................................................................................14 Logiraamatud .........................................................................................................................14 Püstuvuse arvutamine ................................................................................................................14 Püstuvus arvutus ....................................................................................................................17 Autoteki peamõõdud .................................................................................................................18 Kauba kinnitus vahendid ...........................................................................................................19 Näited kuidas korrektselt kaupa kinnitada.............................................................................20
Sildumine ...................................................................................................................................21 Ohutus sildumisoperatsioonidel ............................................................................................22 Haalamisotsad ........................................................................................................................24 Laeva tuleohutus ja päästevarustus ...........................................................................................27 Häired ja häiresignaalid .............................................................................................................27 Häirenimistu ..........................................................................................................................28 Päästevahendid ja nende
mahutavus ..........................................................................................29 Päästepaadid ..........................................................................................................................29 Päästepaadi veeskamine ........................................................................................................30 Mere Evakuatsiooni-Süsteem (MES) ....................................................................................32 Päästeparved ..........................................................................................................................32
NAVIGATSIOON .........................................................................................................................36
Teekond .....................................................................................................................................36 Vaatlus .......................................................................................................................................39 3
Navigeerimine jääs ....................................................................................................................40 Navikatsiooni protsetuurid ........................................................................................................41
Pilot card ....................................................................................................................................45 Ilma prognoosi ettevalmistamine...............................................................................................46 Ilma prognoos reisijatele: ......................................................................................................47
LAEVAJUHTIMIS
SEADMED ...................................................................................................48 RollsRoyce ................................................................................................................................48
Rolls -Royce KaMeWa CPP.......................................................................................................49 Rolls-Royce KaMeWa
muudetava sammuga sõukruvi
karakteristikud . ...............................51 Peamasin ....................................................................................................................................52 Peamasinate väljumiseks ettevalmistamine ...............................................................................53 Trasterid .....................................................................................................................................54 Vöörikrunide väljumiseks ettevalmistamine ja väljalülitamine ................................................55 Vöörikruvide töö kontroll ..........................................................................................................55 ROOLIMINE .............................................................................................................................56 Rooli keskpaneeli elemendid .....................................................................................................56 Käsirool .....................................................................................................................................58
Roolimasina andmed .................................................................................................................59 Stabilisaatorid ............................................................................................................................60 Veekindladuksed .......................................................................................................................65 Veekindel
kontuur .....................................................................................................................66
ELEKTROONILISED LAEVAJUHTIMIS SEADMED .............................................................67 Integreeritud
sild ........................................................................................................................67
Manta Radar ..............................................................................................................................69 Radari menüü .............................................................................................................................70 Manta 3
ECDIS .........................................................................................................................72 NIS 2002 MkII AIS ...................................................................................................................73 MX420 series GPS/DGPS navigator .........................................................................................74 SEM200
track Keeping Autopilot .............................................................................................75 Navigation
Echo Sounder GDS 101 ..........................................................................................76
Ocean Magnetic
Compass Systems ...........................................................................................77 NDR2002
Voyage Data Recorder .............................................................................................78
4 LAEVA ANDMED, VAHITEENISTUS, LASTIKÄSITLUS, PÜSTUVUS,
MEREPRAKTIKA
Üldandmed
Built / Delivered / Converted 2004
Aker Finnyards,
Rauma Operator AS Hansatee
Cargo Flag / Home port Estonia / Tallinn BV I +HULL, +
MACH , RO-RO PASSENGER
SHIP ,
Class UNRESTRICTED NAVIGATION, AUT-UMS, SYS-NEQ-1
Ice class IA SUPER
Call sign ESRP
IMO No 9281281
Stability
SOLAS 74 as Amended / 4,0 Hs
Damage compartment no: 2
Length over all 192,90 m
Length (Article 2(8)) 175,20 m
Breath moulded/max 29,00 m
Depth to bhd
deck 9,7 m
Draught max, 1AS 6,6 m
Air draught 42,5 m
Gross tonnage 40 975
Net tonnage 24 797
DWT 4 930 t
Light weight 15 683 t
Main
engine type 4 × Wärtsilä
Vasa 16V32 LNE
Power output 'MCR' [kW] 6500 kW
Auxillary engine type 3 × Wärtsilä Vasa 6R32 LNE
Bow trusters input [kW] 2 × 1800 kW
Stern trusters input [kW] NA
Means of stabilization Retractable fins
Total generator output [kVA] 3 × 2960 kVA
Voltage 690 V
Max
trailer capacity 65 pcs, (14 m)
Max car capacity 472 pcs (
incl . Hoistable platforms)
Lane length 1 1031 lm (lane with 3,2 m),
1320 lm (lane with 2,4 m) 472 lm (platforms)
Lane length 2 (hoistable)
SB 4,90 m; P 4,50 m;
below hoistable
platform 2,10 m; above
Free height on car deck platforms 2,40 m
Bow
gates and widths 4,9 x 5,0 m
Stern gates and widths 4,9 x 8,4 m (2 pcs)
5 Total
interior area 19 580 m²
Pass . public area inside 7 120 m²
Seats inside 0
Pass.
open deck 1960 m²
Shop area 805 m²
Restaurant area 1350 m²
Max number of passengers 2500
Passenger cabins 739
Outside cabins 305
Passenger lower berths 1228
Passenger total berths 2246
Crew cabins/berths 216
Max number of persons
2700 Lifeboats / capacity 6 pcs/150 persons
Liferafts / capacity 26xVIKING 100DKS; 2xVIKING 50 DKS
Rescue boats 1 RB+1 FRB
Service speed 85% 22,0 kn
ME fuel
consumption 195 g/kWh (at 85%MCR, ISO)
AE fuel consumption 192 g/kWh (at 100%MCR, ISO)
Boiler fuel consumption Not specified
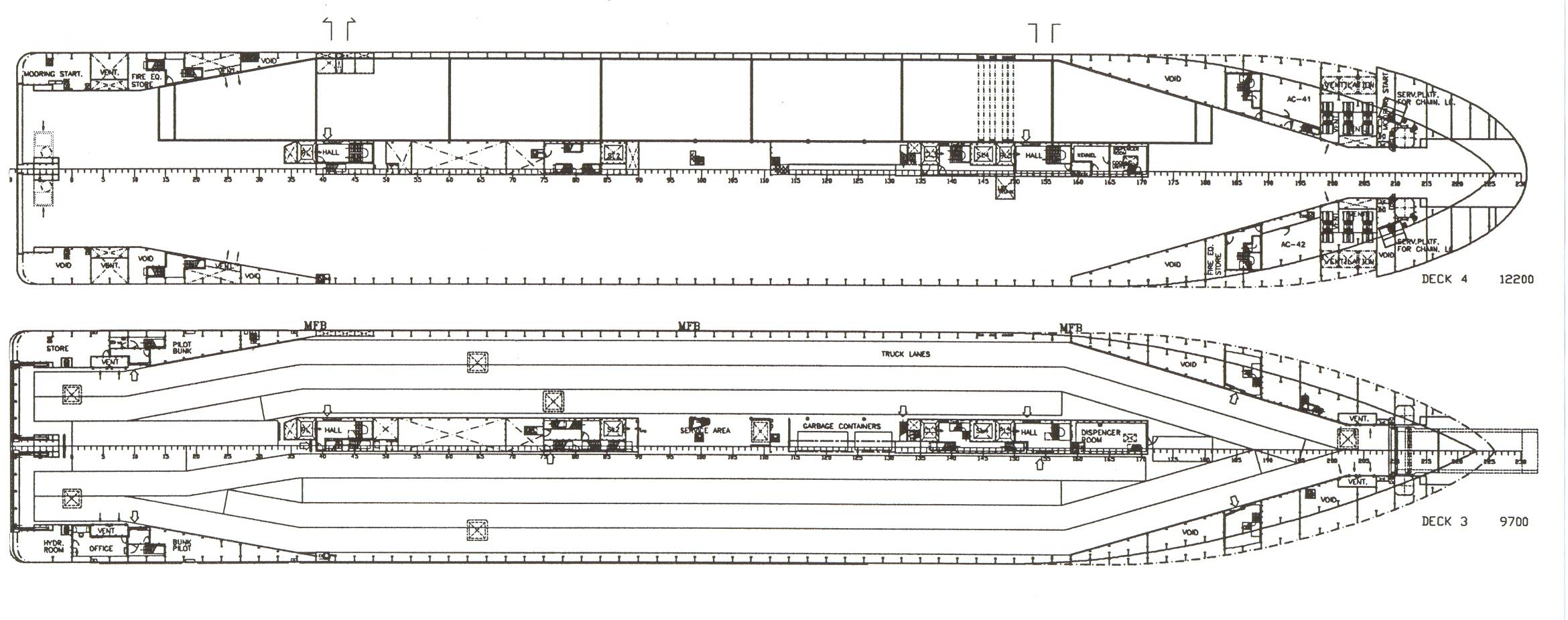
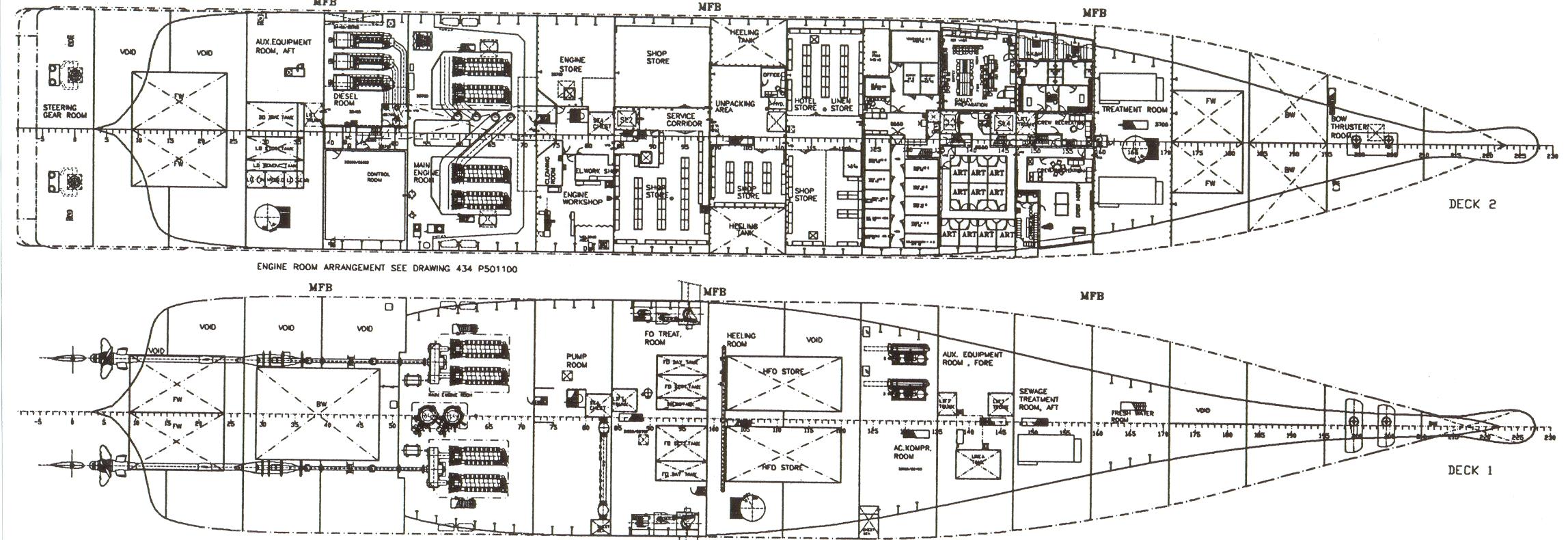
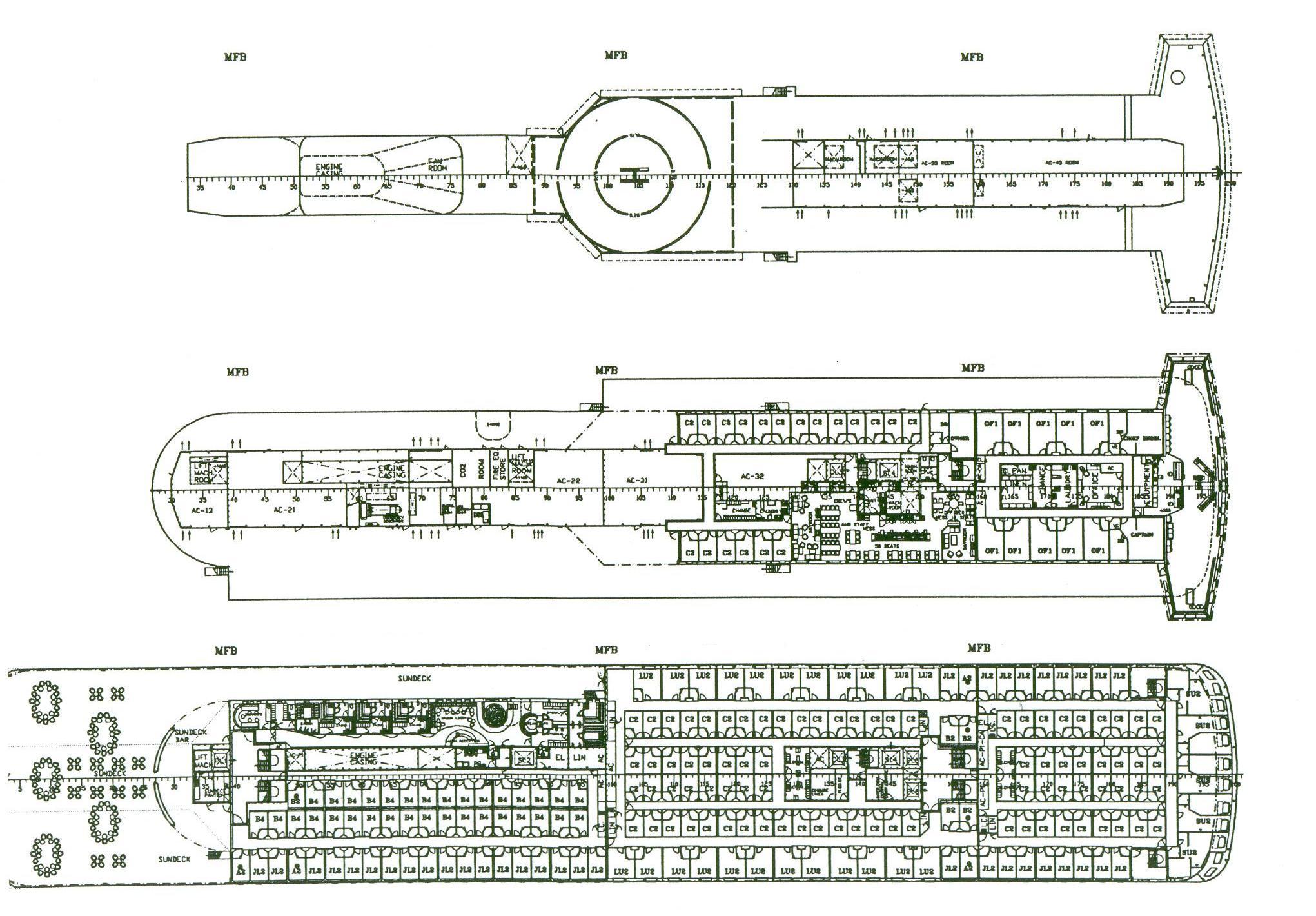
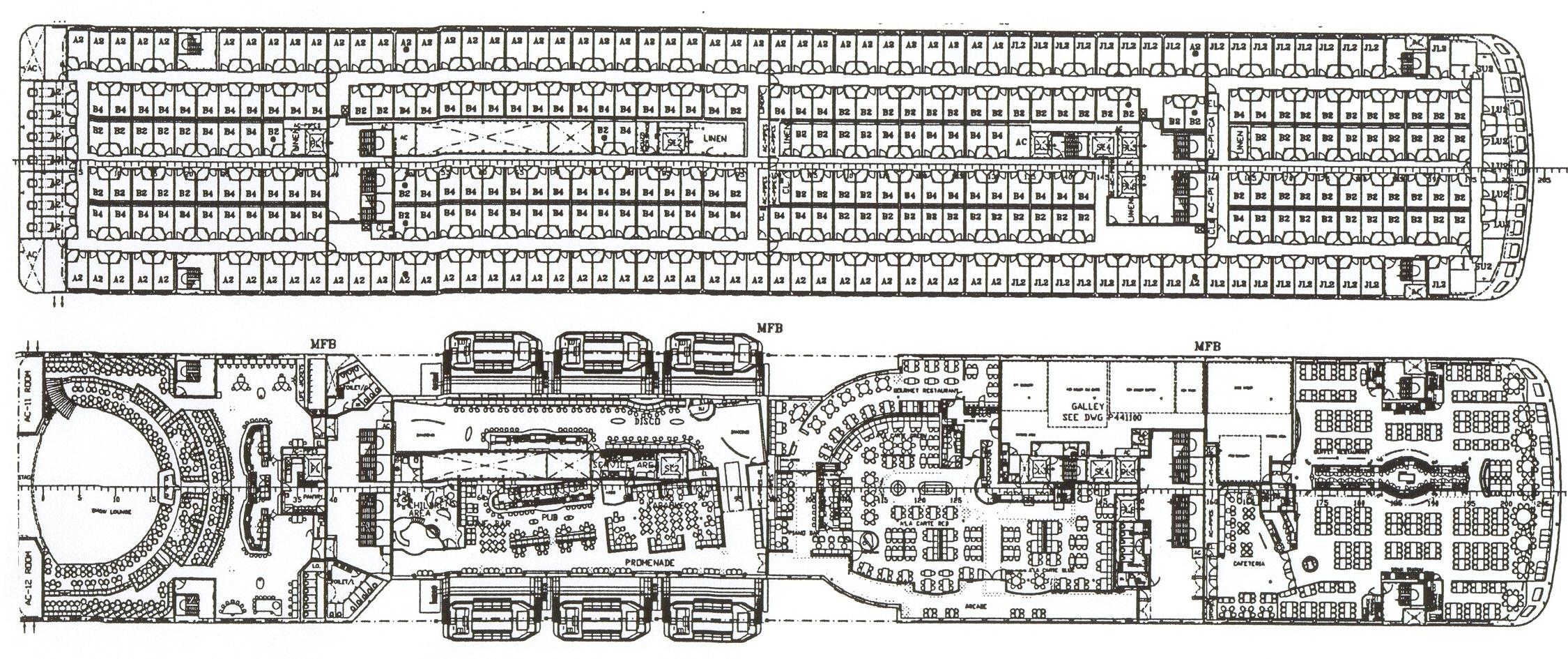
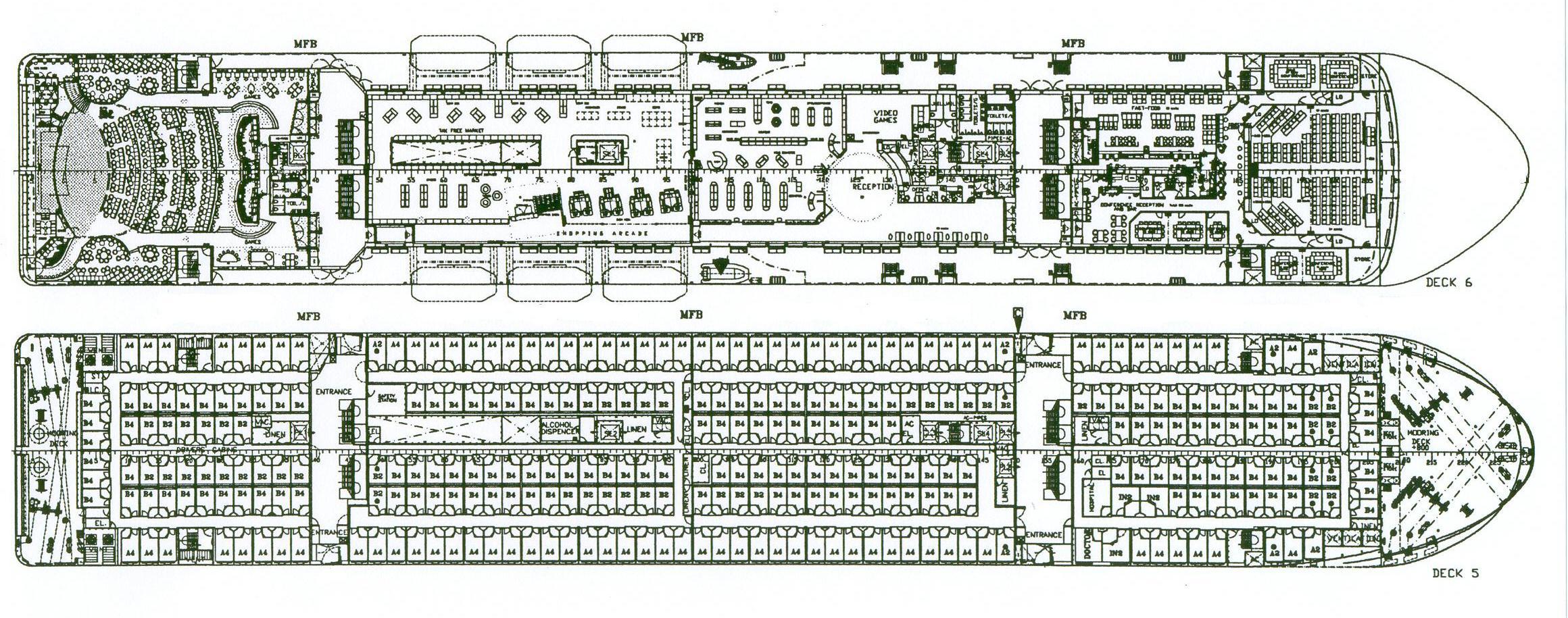
6 Joonised
7 8 9 10 11 Vahitüürimehe vastutus navigatsioonivahis
Vahitüürimees on
vastutav planeeritud reisiülesande täitmise eest tema vahis. Ta peab pidevalt
jälgima,et oleks järgitud COLREG,
STCW ning muud rahvusvahelised, rahvuslikud ning
kohalikud nõuded.Vahitüürimees peab vahti navigatsioonisillas. Sillast lahkuda ei tohi mitte
mingil juhul enne, kui uus vahitüürimees ei ole vahti üle võtnud vastavalt kehtivale korrale.
Vahitüürimehe põhiliseks vastutusalaks on kindlustada navigatsioonivahi efektiivsus ning laeva
navigatsiooniohutus. Seetõttu peab Vahitüürimees olema kindel, et on kindlustatud pidev ja
efektiivne ümbruskonna jälgimine. Laevadel eraldi asuva kaardikambriga on vahitüürimehel
lubatud siseneda kaardikambrisse lühikeseks ajaks seoses navigatsiooniliste ülesannete
täitmisega, kuid eelnevalt peab ta
veenduma , et navigatsiooniline olukord seda võimaldab.
Vahitüürimees jääb vastutavaks laeva ohutuse ja navigatsiooni eest vaatamata kapteni
viibimisele
sillas kuni momendini, kuni on saanud kaptenilt selgelt mõistetava
korralduse/informatsiooni selle kohta, et kapten on tema kohustused üle võtnud. Vahitüürimehe
kohustus on olla kursis laeval läbiviidavate töödega, töödega raadioantennide, radariantennide,
laevavile läheduses, et vajadusel hoiatada töötavaid inimesi vastava aparatuuri kasutamisest.
Soovitav on kasutada informatsioonilisi tabeleid hoiatamaks tööde läbiviimisest vastava
aparatuuri läheduses.
Hea merepraktika navigatsioonivahis
Vahitüürimees on vastutav pideva ja tähelepaneliku vahipidamise eest. See on põhiline vältimaks
kokkupõrkeid, madalikulesõite ning teisi juhtumeid.
Pidamaks efektiivset vahti peab vahitüürimees kindlustama: -visuaalse
vahi kindlustamaks olukorra täieliku valdamist,
mise ,
jälgimise.
Peamasin
Vahitüürimees peab arvestama sellega, et peamasin on pidevalt tema käsutuses abistamaks
vajadusel manööverdamisel. Ta ei tohi kahelda peamasina kasutamise suhtes, kui selleks tekib
vajadus. Ta peab olema täielikult kursis laeva manöövriomadustega ning peatumisteekonnaga.
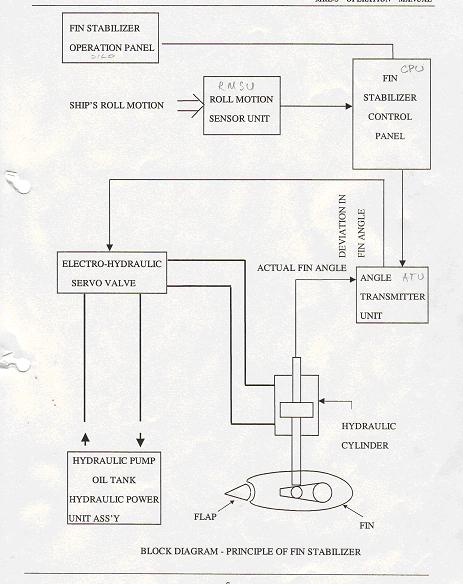
Stabilisaatorite kasutamine
Stabilisaatorite kasutamiseks ning nende eemaldamiseks annab vastava korralduse kapten või
tema poolt volitatud isik. Vahitüürimees asetab sillas ettenähtud kohale vastava
informatsioonilise tabeli.
Navigatsiooniaparatuuri perioodilised kontrollid
Vahitüürimees peab läbi viima järgnevaid regulaarseid kontrolle: autopiloodi poolt hoitav kurss,
12 tavalt
võimalusele peale igat suuremat kursimuutust,
sünkroniseerimine,
Navigatsiooniaparatuuri igapäevased testid
Järgnev
aparatuur peab olema kontrollitud/
testitud igapäevaselt:
alarmAutopiloot
Sõltuvalt aparatuuri usaldatavusest ning navigatsioonilisest olukorrast võib olla automaatrool
kasutusel ka piiratud vetes sõidul.
Vahitüürimees peab arvestama sellega, et roolimehe kasutamine varakult ning üleminek
käsijuhtimisele annab võimaluse varakult lahendada potentsiaalseid ohusituatsioone. On
äärmiselt ohtlik lasta areneda olukorral kus automaatjuhtimisel oleval laeval on vahitüürimees
ilma vahimadruseta ning ta peab katkestama vaatluse reageerimaks adekvaatselt ohuolukorrale.
Üleminek automaatjuhtimiselt käsitsijuhtimisele peab olema läbi viidud õigeaegselt
vahitüürimehe poolt või tema kontrolli all.
Visuaalne vaatlus
Vahitüürimees peab
korraldama vastava audio- ja visuaalse vaatluse, samuti kõigi muude
võimalike meetodite kasutuselevõtu, mis on vajalikud olukorra ning kokkupõrkeohu
adekvaatseks
hinnanguks .
Kapteni kutsumine
Vahitüürimees peab informeerima koheselt kaptenit juhul, kui ilmneb üks järgnevatest
asjaoludest:
usi määratud kursi hoidmisega seoses pingelise liikluse, meteoroloogiliste
tingimustega jne.
13 roolimasina muude
mehhanismide rikke korral
Juhul, kui ei ole võimalik täita tingimust kapteni viivitamatu väljakutsumise osas, peab
Vahitüürimees võtma tarvitusele koheselt kõik võimalikud meetmed kindlustamaks laeva
ohutust.
Informatsioon vahikoosseisule
Vahitüürimees peab andma vahikoosseisule vajaliku informatsiooni, instruktsioonid ja
korraldused mis on vajalikud ohutu vahi ning efektiivse vaatluse läbiviimiseks.
Search and Rescue
Kapten,
saades signaali abivajava laeva, lennuki või päästepaadi kohta peab nii kiiresti kui on
võimalik suunduma appi ohuolukorras asuvatele inimestele või laevale kui see on mõistlik ning
teostatav. (SOLAS Ch. V reg. 10)
Laeva süvis ning muu informatsioon
Informatsioon laeva süvise kohta peab olema saadaval roolikambris, ning peab olema pidevalt
korrigeeritud vastavalt muutustele mis tekivad laeva reisi käigus. Ballastimise tulemusena
tekkinud laeva süvise muutused peavad olema vastavalt välja arvestatud ning fikseeritud
vastavalt nõuetele. Informatsioon peamasina tööreziimi kohta peab olema roolikambris selgelt
kindlaks määratav. Vahitüürimees on vastutav kõikide sillas asuvate süsteemide ning nende
kontrollsüsteemide jälgimise eest.
Logiraamatud
Vahitüürimees on kohustatud
fikseerima logiraamatus laeva liikumist ning laevapere tegevust
puudutava informatsiooni. Samuti on ta kohustatud fikseerima raadiopäevaraamatus kogu laeva
raadiosidet puudutava vajaliku informatsiooni.
Püstuvuse arvutamine
Väljavõte Stability bookleti note'dest
1. EELPÜSTUVUS.
Saades kaubamanifesti, arvutame kokku
meetrid ja
tonnid . Saadud tonnidega teeme NAPA's
eelpüstuvuse, mis aga on kindlasti ebatäpne, kuna autode kaalud muutuvad kindlasti laadimise
käigus. Samuti võib muutuda laaditavate ühikute arv nii reisi kui kauba poole pealt.
Eelpüstuvuse arvutamiseks teeme järgmised
toimingud :
SAVE AS salvestame pealehel uue reisi nt. STO-MAR-TAL ja muudame ka lähtesadama nt.
STO.
14 Edasi lähme alamenüüdega:
LOAD TANKS teeme
tankide UPDATE , kõik tangid saavad antud hetke väärtused.
LOAD STORES võtame maha eelmisest reisist
sisestatud reisijate arvu.
LOAD CARGO võtame maha kõik eelmisest reisist sisestatud kauba.
Jättes muutmata meeskonna arvu, saame võrrelda IAS'i poolt antavaid süviseid NAPA süvistega
ja krenomeetri
kreeni võrrelda NAPA poolt antava kreeniga. Saame mingisuguse pildi, kui palju
mõjutavad kreeni sildumisotsad.
Menüü LOAD TANKS alt võtame valiku TABLE ja sealt alt HWB (heeling water ballast), kus
paneme heelingu
tankid 22P& 22S võrdseteks.
Nüüd sisestame menüü LOAD STORES alt reisijate arvu ja kontrollime erinevate raskuste nagu
nt.
reisijad , meeskond jne raskuste koordinaate kindluse mõttes.
Edasi sisestame menüü LOAD CARGO alt
esialgse kauba tonnid. Kauba jaotame parraste
vahel, jälgides kreeni. Kui kaup peal ja
kreen null, siis ajame paika trimmi. Selle abil saame
teada kuidas laeva
laadida , et laev väljuks sirge kiiluga.
Et sirget
kiilu saada, nihutame vastavalt vajadusele kas vööri või
ahtri poole mõlema
parda kauba vööri ja ahtri koordinaate.
Kui kaubameetrite järgi tuleb kasutusele võtta ka
platvorm , siis panna vastavalt
platvormile plaanitavate autode arvule ka tonnid sinna.
2. VÄLJUMISE PÜSTUVUS.
Pärast laadimist koostame väljumise püstuvuse lõpliku kaubamanifesti ja reisi poolelt tulnud
ühikute arvu põhjal. Andmed sisestame arvutis olevasse vormi Cargo
Report , mis annab meile
lõplikud väljumise kaubameetrid ja tonnid. Reisi poole andmed saame
piletite järgi.
Cargo Report valmis läheb töö edasi NAPA's.
LOAD TANKS teeme UPDATE ja seejärel paneme heelingud võrdseks, kuna väljumise ajal
võib olla tanke pumbatud.
LOAD STORES korrigeerime reisijate arvu infost saadud info põhjal ja meeskonna arvu.
LOAD CARGO nüüd paigutame kauba vastavalt laadimise lõpus vaadatud süvistele ja
kreenile. Nii saame kauba tõelised kordinaadid väljumisel.
Kauba tonnide arvutamisel kasutame järgmisi suurusi:
Sõiduauto 1,5 t / 5 meetrit
Pakett, minitreiler 2,0t / 7 meetrit
Buss 10 t /12 meetrit
Kaubamanifestist saame kauba poole meetrid ja tonnid.
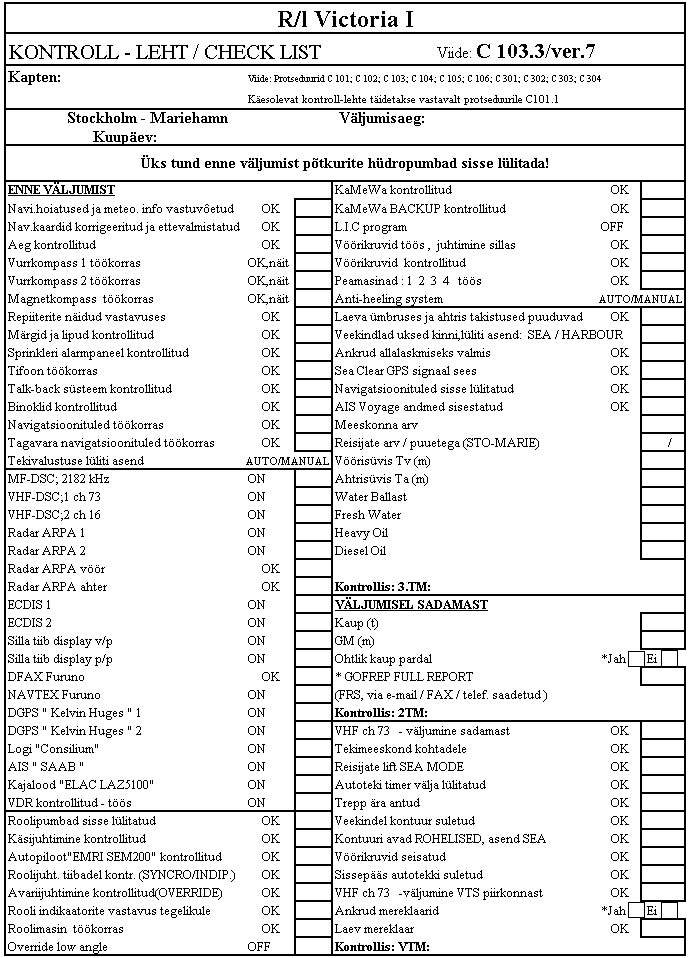
3. PÜSTUVUSE ARUANDE
PRINTIMINE JA LOGIRAAMATU ANDMED.
15 Valiku
PRINT alt pealehel prindime välja PRINT STABILITY REPORT ja PRINT CARGO
REPORT.
Logiraamatusse kirjutame Cargo Report'lt ja püstuvuse arvutuselt järgmised andmed: GM,
kaubaühikute arv /tonnid, Tvöör ja Tahter.
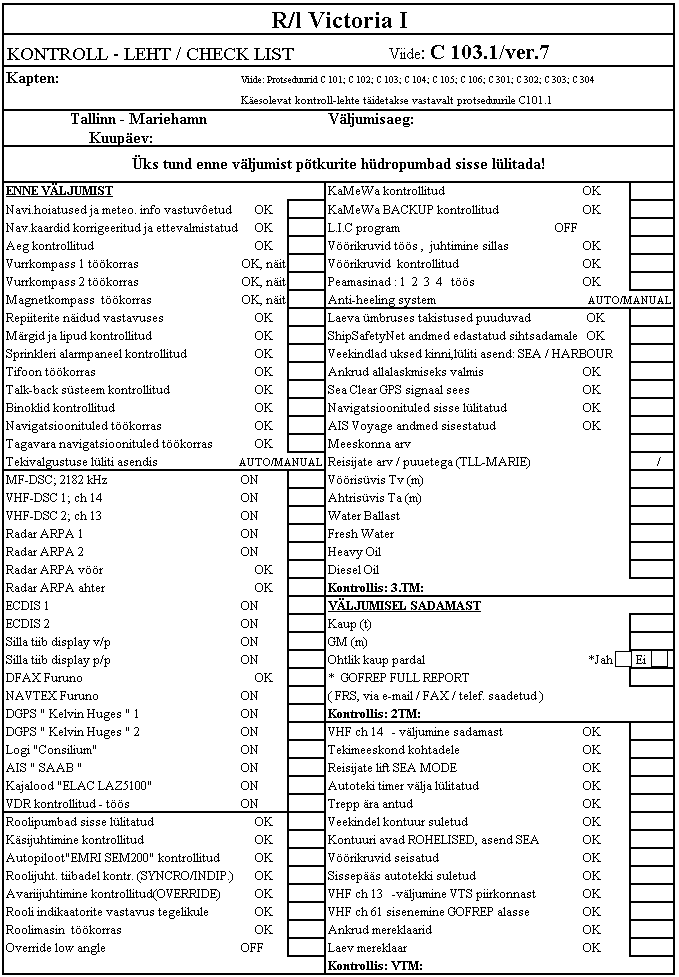
Logiraamat täidetud, täidame veel silla protseduuri C103.1 või C103.3. Seejärel anname kõik
käimasoleva reisi kaubadokumendid vanemtüürimehele ülevaatamiseks.
16 Püstuvus arvutus
Kauba kaalud Kauba Eelmanifest Kauba meetrid
Eelpüstuvuse arvutus Kauba
paigutus prog.-s NAPA LOAD TANKS Tankide update, heeling tankide seis vastavalt Esialgsete andmete LOAD STORES ilmastikule sisestus LOAD CARGO Reisijate ja meesk. Arv Kauba kaal Püstuvuse kriteeriumid
Area under GZ curve up to 30 deg. 0,055 mrad
Area under GZ curve up to 40 deg. 0,090 mrad EELPÜSTUVUS Kontrollida E
Area under GZ curve btw. 30-40 deg. 0,030 mrad sisestatud I andmete
GM 0,15m
Max. GZ 0,2m VASTAB õigsust ja teha uus
IMO
weather criterion 1,000 arvutus.
Kreen 0 deg. NÕUETELE
Trimm 0 15 cm ahtrisse
Kauba
laadimineAndmed väljumisel Kauba lõppmanifest
LOAD TANKS Tankide update, heeling tankide seis vastavalt
Püstuvuse arvutamine LOAD STORES ilmastikule LOAD CARGO
väljumisel prog-s. NAPA Reisijate ja meesk. Arv Kauba kaal
Püstuvuse kriteeriumid
Area under GZ curve up to 30 deg. 0,055 mrad
Area under GZ curve up to 40 deg. 0,090 mrad PÜSTUVUS Kontrollida sisestatud
Area under GZ curve btw. 30-40 deg. 0,030 mrad
GM 0,15m VÄLJUMISEL andmete õigsust ja
Max. GZ 0,2m teha uus arvutus.
IMO weather criterion 1,000
Kreen 0 deg. VASTAB
Trimm 0 15 cm ahtrisse NÕUETELE
Püstuvuse arvutuste kontroll kapteni poolt.
17 Autoteki peamõõdud
SB kõrgus: 4,9 m Peateki koormus: üldine: 2,5 t/m2 Ahtrirambid: pikkus - 11,7 m
P kõrgus: 4,5 m semitreiler: 15,0 t
teljel ; 30 t boggi laius - 8,4 m
Ridade laius: 3,1 m 40 t SWL: 16,25 t teljel; 33 t boggie ava kõrgus 4,9 m 16,5 m treileri max. mass: 40 t
Vööriramp:pikkus 17,8 m
Platvormi all kõrgus: 2,1 m laius 5,0 m
Platvormi peal kõrgus: 2,4 m ava kõrgus - 4,9 m
Platvormi all ja peal ridade laius: ~2,4 m
Treileripukke: 35 tk; kinnitusrihmu: 235 tk (+86); tõkiskingad: 140 tk
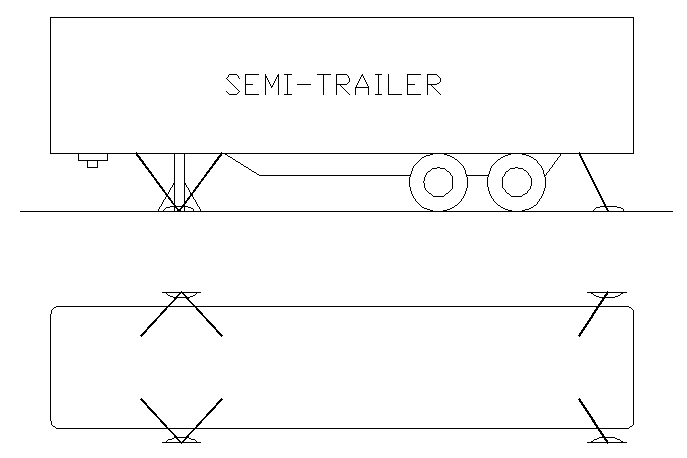
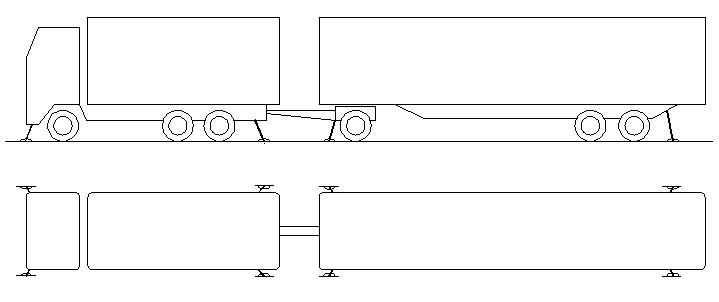
18 Kauba kinnitus vahendid
TRAILER
HORSE :
Type:
Description : SEASAFE C 10 A Trailer horse
Quantity: MBL: 40 pcs 100 t
TRAILER LASHING:
Type: Description: SEASAFE C 25 Web lashing, 75 mm polyester web,
hook -elephant
foot , length 0.5+2.5 m
Quantity: MBL: 300 pcs 20 t
TRUCK LASHING:
Type: Description: SEASAFE C 26 Web lashing, 50 mm polyester web, hook-elephant foot, length 0.5+2.0 m
Quantity: MBL: 200 pcs 12 t
CAR LASHING:
Type: Description: SEASAFE C 24 Web lashing, 35 mm polyester web, hook-link, length 0.5+2.0 m Quantity: MBL: 300 psc 1.5 t
19 Näited kuidas korrektselt kaupa kinnitada
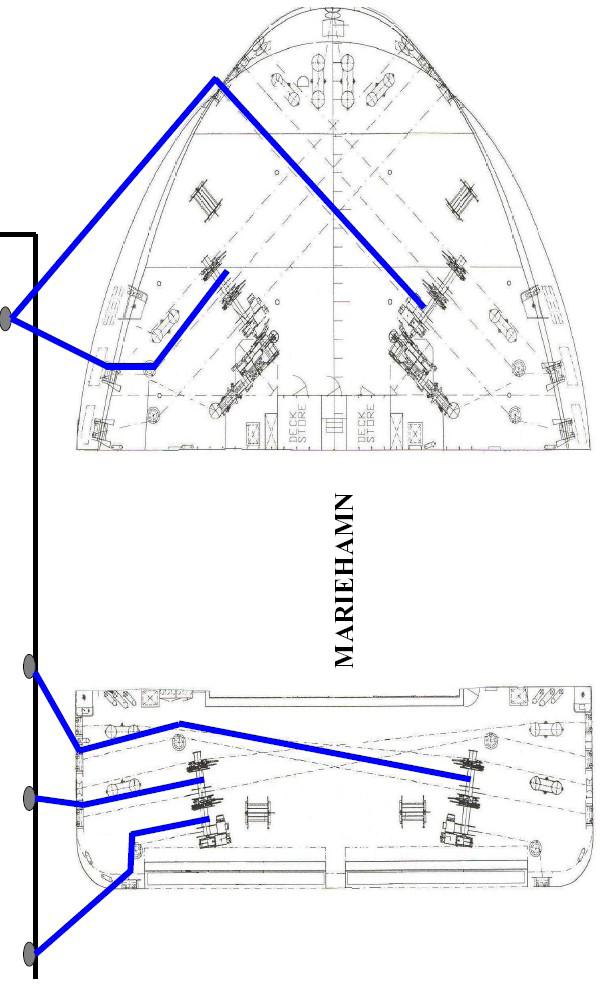
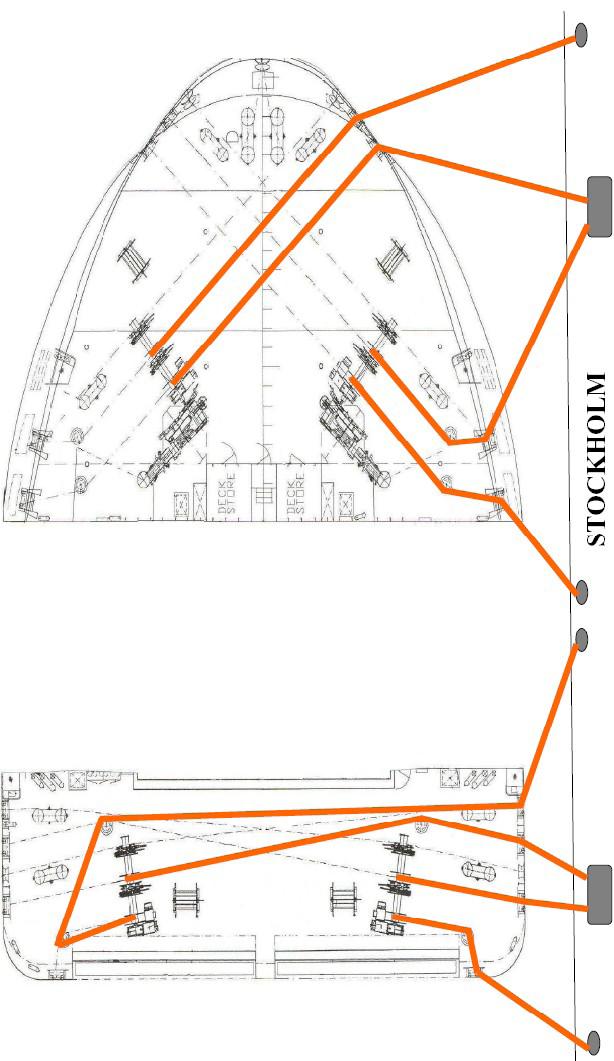
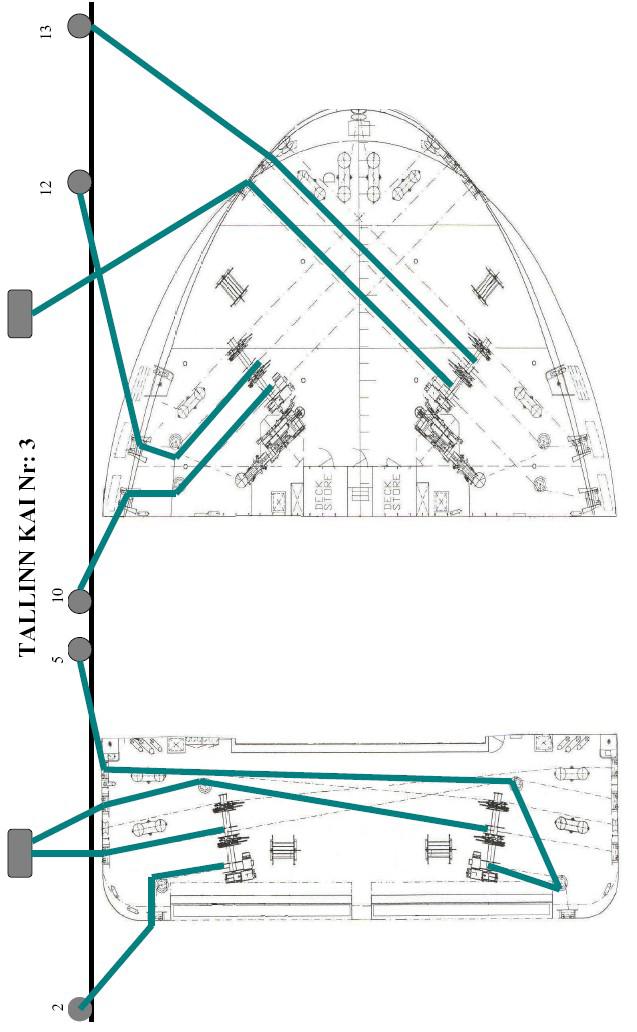
20 Sildumine
Tekimeeskonna jaotus ja kohustused sildumisel.
Haalamise ettevalmistus: Kapten: 1. Määrab kindlaks laevapere liikmete paigutuse haalamisel. Vanemtüürimees on kohustatud: 1. Informeerima õigeaegselt
mehaanikut eelseisvast haalamisest. 2. Informeerima haalamisel osalevaid meeskonnaliikmeid eelseisvast haalamisest. 3. Kindlustama, et soritakse ära kõik parda taha ulatuvad ja haalamist segavad seadeldised. 4. Kontrollima side olemasolu silla ning haalamisjaamade vahel, laeva sireeni ning valgussignalisatsiooni. Vastutavad meeskonna liikmed vööris ja ahtris: 1. Kontrollivad side olemasolu silla ning haalamisjaamade vahel. 2. Annavad korralduse haalamisjaamades
otsad laiali kanda, ette valmistada viskeliinid, vendrid ja otsepidurid. 3. Kannavad ette haalamiseks valmisolekust.
Pootsman on kohustatud: 1. Kontrollima ankru- ning haalamismehhanismide töökindlust. 2. Veenduma, et ankruketikastis pole inimesi. 3. Kontrollima otsi, kette, seekleid ja muud haalamisvarustust, veendumaks nende korrasolekus.
Tekimeeskonna paigutus haalamisel: Sillas kapten ja/või vanemtüürimees annavad korraldusi haalamisel;
vahimadrus seisab roolis. Vööri haalamisjaam sidevahendiga varustatud 3. tüürimees ja pootsman, 3 madrust. Ahtri haalamisjaam sidevahenditega varustatud 2. tüürimees, vanemmadrus, 3 madrust. Masinaruum vanemmehaanik, vahimehaanik kindlustavad peamasinatöö,
elektromehaanik tagab laeva automaatika ja diiselgeneraatorite töö.
Haalamine: Kapten: 1.
Teostab laeva sisenemist ning manööverdamist sadama akvatooriumil. Vanemtüürimees: 1. Võtab vastu ettekanded haalamisjaamadest nende valmisoleku kohta. 2. Annab korraldusi haalamisjaamadesse otsade
andmiseks kaldale. Tüürimehed: 1. Informeerivad silda kaugusest ümberasetsevate laevade ning kaideni, sõltuvalt liikumise
suunast . 2. Juhivad haalamist vahetult koha peal vastavalt sillast saadud korraldustele. Haalamisotste kinnitamisest informeeritakse silda Peale masinate ning vööripõtkurite seiskamist jälgitakse lühiajaliselt laeva kinnitumist haalamisotstega. Veendudes, et laev on kindlalt kai ääres, vabastab kapten või vanemtüürimees tekimeeskonna haalamisjaamadest ning annab korralduse autoteki rambi avamiseks.
Vanemtüürimees informeerib masinat haalamise lõppemisel, viimasena lahkuvad
haalamisjaamadest tüürimehed, eelnevalt veendudes, et kõik on korras.
21 Kinnitusotste kaldale andmise järjekord. Esimesena antakse vöörist ja ahtrist kaile pelide põhilised otsad- pikiots ja
spring . Seejärel fikseeritakse laeva 10 cm täpsusega ning kinnitatakse ka ülejäänud otsad.
Vööris: 1 pikiotsa, 2 pressots, 1 springi.
Ahtris: 1 pikiotas, 2 pressots, 1 springi.
Kui
puhub tugev tuul kai poolt, viiakse lisaks vöörist ja ahtrist kummastki üks või kaks
pressotsa.
Ohutus sildumisoperatsioonidel
1. Haalamisele lubatakse ainult neid meeskonnaliikmeid, kes omavad vastavat
erialast ettevalmistust, ning on läbinud
ohutustehnika instruktsiooni. 2. Laeva pardal viib haalamise ohutustehnikaalase instruktsiooni läbi vanemtüürimees. 3. Haalamise käigus kontrollib ning vastutab õigete töövõtete järgimise eest tüürimees, kes juhib töid kohapeal. 4. Kõik meeskonnaliikmed, kes võtavad osa haalamisest peavad kandma terveid tööriideid, jalanõusid, kiivreid ning töökindaid. 5. Haalamiseks ettevalmistamisel tuleb haalamise otsad tekile lahtiarutada küllaldases
pikkuses . Keelatud on otste järgiandmine puhtidest või poolide pealt. Kui siiski tekib vajadus anda
trossi järgi puhtist, tuleb
visata trossikeerud enda ette. 6. Haalamisotste kaldale või teisele laevale andmise ajal ei tohi seista lahtiharutatud keerude sees. Kui tekivad topeltsõlmed tuleb need väljakeerata enne trossi maale andmist. 7. Ei tohi kiiresti jooksvat trossi
pidurdada käe või jalaga. 8. Viskeliin tuleb enne maale või teisele laevale andmist tekile laiali harutada. Enne viskamist tuleb kindlasti hüüda "alt ära!". 9. Maale antavat trossi tuleb järgi anda aeglaselt, nii et kaldale niisama palju jõutakse tõmmata. 10. Kui trossile pannakse stoppar, ei tohi
madrus , kes hoiab stoppari vaba otsa, seista eespool pinge all oleva stopparitrossi suunda ja lähemal kui üks meeter haalamisotsale mähitud stopparist. 11. Stoppari lahtiandmisel peab seisma trossi pinge
vastassuunas kui vabastatakse trossi stopparist. 12. Haalamise otsa võib hakata pingutama peale haalamist juhtiva tüürimehe käsku, et haalamisots on kinnitatud ja vaba takistustest. 13. Kui antakse haalamisotsa järgi või pingutatakse, peab haalamispaardist kinni hoidma vähemalt ühe meetri kaugusel pollarist või pelitrumlist. 14. Töötades trossidega kiipide või rullkiipide juures on keelatud haalamise trosse järgi anda või pingutada. 15. Haalamistööde kohtades on haalamise ajal kõrvaliste isikute
viibimine keelatud. 16. Käsu haalamismehhanismide töölerakendamiseks tohib anda ainult haalamist juhatav tüürimees. 17. Keerde võib lisada trumlile ainult siis, kui
trummel ei pöörle. Järgi anda trossi pöörlevalt trumlilt on keelatud. 18. Pärast haalamistööde lõpetamist tuleb liigsed trossid asetada puhtidesse või kerida poolidele ja pelid välja lülitada.
22 19. Haalamiseks tohib kasutada ainult korrasolevaid trosse, millistel on Klassifitseerimisühingu
sertifikaat . Kasutada ei tohi vigastatud, roostes ja jäiki trosse.
20. On keelatud kasutada otsi, mille kuuekordne
diameeter ületab
trumli diameetri.
21. On keelatud kasutada pelitrumleid, millel on paralleelsed astakud.
22. On keelatud siduda trossidele sõlmi.
23. On keelatud lasta samas kiibist läbi ühes terasvaieriga või kinnitada kaks otsa ühele ja samale pollarile.
24. Haalamise ajaks tuleb kõik
luugid ja illuminaatorid, millised on kaist madalamal, sulgeda.
25. Haalamise ajal ei tohi suitsetada ega lobiseda.
23 Haalamisotsad
24 25 26 Laeva tuleohutus ja päästevarustus kuuluvad:
1. hingamisaparaadid, tulekindlad ülikonnad, kiivrid,
saapad , lambid, varusuruõhuballoonid,
2. portatiivsed tulekustutusvahendid, mis asuvad vastavalt
FIRE AND
SAFETY PLAN-ile
laeva erinevates paikades - kaasaskantavad
tulekustutid , vahuaparaadid, tuletekk, labidad,
kirved .
3. fikseeritud tuletõrjumise
varustus . piserdussüsteem ja vihmutussüsteem, CO2 süsteem,
hüdrandid,
voolikud , tule- ja veekindlad uksed.
4. esmaabivarustus
5. kaitseriietus, päästevestid, ohutusvööd ja
rakmed , termokotid
6. häireseadeldis, automaatne tulehäire
signaal , tulekahjust teavitamise nupud, signaal ja
hoiatuskellad, valjuhääldajad
7. hädaolukorra
valgustus ja märgid
8.
telefonid ja portatiivsed
raadiosaatjad 9. päästepaadid ja parved koos varustusega
10. Mere Evakuatsiooni Süsteem
11. pürotehnilised vahendid
12. helikopteri tekk
13. laeva vee- ja tulekindlad sektsioonid -ja päästevarustuse
asetus on näidatud FIRE AND SAFETY PLAN.il. VENTILATION PLAN.il.
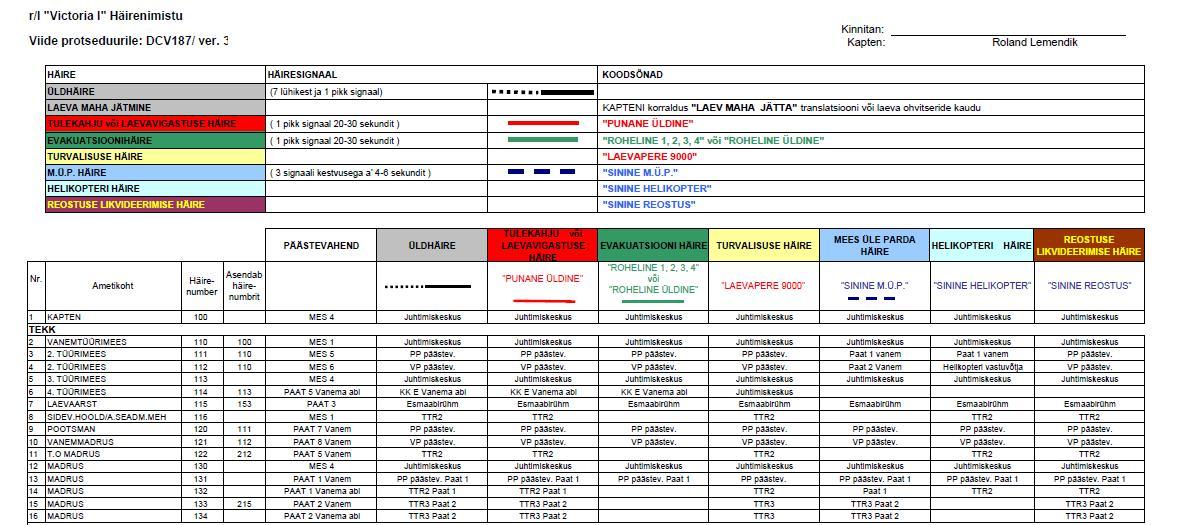
Häired ja häiresignaalid
1. ÜLDHÄIRE
2. TULEKAHJU või LAEVAVIGASTUS
3. EVAKUATSIOON
4. TURVALISUSE HÄIRE
5. MEES ÜLE PARDA
6. HELIKOPTER
7. REOSTUSE LIKVIDEERIMINE teavitamiseks vastavast häirest mest lühikesest ja ühest pikast
helisignaalist. Laeva erinevais kohtades asuv informatsioon reisijatele nõuab selles olukorras
reisijatelt kohest minekut kogunemiskohtadesse.
translatsiooni, või laeva tifooniga, või märgusõnaga (Punane., Roheline., Sinine.)., vôi
helisignaal ja märgusôna koos, millele vôib järgneda lisainformatsioon
juhtunu kohta (aga ei
pea).
võimalusel enne häire väljakuulutamist kaptenit.
27 Häirenimistu
28 Päästevahendid ja nende mahutavus
Tekk 6 . parema parda paaditekk
Paat Nr.1 - kiirpaat: 6 inimest
Päästepaat Nr.3: 150 inimest
Päästepaat Nr.5: 150 inimest
Päästepaat Nr.7: 150 inimest
Tekk 6 . vasaku parda paaditekk
Paat Nr.2 . valvepaat: 6 inimest
Päästepaat Nr.4: 150 inimest
Päästepaat Nr.6: 150 inimest
Päästepaat Nr.8: 150 inimest
PÄÄSTEVAHENDEID 912 inimesele
MES . Mere Evakuatsiooni Süsteemid
6 tekil parem parras
MES 1: 404 inimest
MES 3: 404 inimest
MES 5: 455 inimest
6 tekil vasak parras
MES 2: 404 inimest
MES 4: 404 inimest
MES 6: 455 inimest
Kokku kohti päästevahendites 3438 inimesele
Päästepaadid
Laevale on paigaldatud 6 poolkinnist päästepaati, tüüp Fassmer SEL 10.5, mis on varustatud
mootoritega.
Paadid asetsevad 7. tekil, juurdepääs paatidele asub 6. tekil. Iga paadi mahutavus
on 150 inimest.
IMO/SOLAS PÄÄSTEPAADI TÄHISTUS
Üldandmed:
Pikkus 10.5 m
Laius 4.26 m
Kõrgus 1.85 m
Mahutavus (max) 150 inimest
Kaal ilma inimesteta
5700 kg
Mootori võimsus 29 hobujõudu
Kiirus 6 sõlme
Kütusetanki mahutavus 240 l
Töökaugus üle 24 tunni kiirusega 6 sõlme
Korpuse materjal klaasplastik
29 Masina juhtimine toimub roolimehe kohalt. Rooli juhtimine on hüdrauliline ja täiendava
avariijuhtimissüsteemiga. Elektriline starterisüsteem kahe sõltumatu akuga. Käsikuivenduspump
tootlikkusega umbes 60 l/min.
Päästepaadi veeskamine
Juhend, mis asetseb päästepaadi läheduses, näitab täpset järjestust tegevusest, mida on vaja teha
paadi veeskamiseks. Vaatamata sellele on täielik paadi veeskamise protseduur toodud ära
järgnevatel lehtedel.
Ettevalmistus veeskamiseks
1. Pinguta paadi lööprid käsivändaga. 2. Eemalda kõik kaitsekatted. 3. Kontrolli ja eemalda kõik takistused. 4. Ühenda lahti elektrikaabel. 5. Ava külje peal olev sissepääs ja kinnita
present . 6. Veendu, et
kork oleks suletud. 7. Aseta paati kõik vajalik varustus: VHF-raadiosaatjad, raketid,
EPIRB , liiniheiteseade jne. 8. Lülita aku lüliti asendisse 1 või 2
Veeskamisprotseduur
Anna järgi, kui on võimalik pinge kinnitustrosside talrepitelt. Ava kinnitustrosside konksud ja veendu, et kinnitustrossid ei sega paadi allalaskmist. Tõsta trummelpiduri kangi kuni paat liigub paaditeki
tasemele . Seda on võimalik teha kahest kohast: 1. Paadis olles tõmba tugevasti distantsjuhtimistrossist. Selle tulemusena liigub paat asendisse, kus on võimalik paati minek. Paat peatub siis, kui lasta lahti distantsjuhtimistrossi käepidemest.
2.
Vintsi juurest on võimalik paat lasta asendisse, kust toimub paati minek tõstes vintsi
käsipidurit.
Lastes kangi lahti, paat peatub. Paadi väljaviimine on lubatud, kui paadis on mitte
30 üle 2 inimese. Paat asetub automaatselt paaditeki kõrval asendisse kus on võimalik paati minek.
Selleks tuleb reguleerida bousingute pikkus asendisse "L".
Paatidesse minek
Tõsta ligihoidva tali pidurikangi. Selle tulemusel eemaldub paat aeglaselt laeva pardast ja jääb rippuma paadilööpritele. Eemaldamiskiirust saab reguleerida piduriga, vältides paadi pendeldamist. Ligihoidva tali eemaldamiseks paadi küljest, eemalda lukust splint ja seejärel pööra lukust käepidet. Paat on valmis veeskamiseks. Paadi veeskamiseks tõsta paadi vintsi
pidur , milleks on kaks võimalust: 1. Paadist: Tõmba tugevalt distantsjuhtimise trossi käepidet. Selle tulemusel paat laskub kuni on jõudnud veepinnani.
Laskumine peatub koheselt, kui lasta trossi käepidemest lahti. 2. Vintsi juurest paaditekilt: tõsta vintsi piduri kangi käsitsi, kangist lahti lastes paadi laskumine peatub. Kui paadi vettelaskmist juhitakse vintsi juurest, tuleb veenduda distantsjuhtimistrossi korrektses mahatulekus trumlilt.
Mootori käivitamine
1. Ava kütuseklapp, veendu, et käigukang on neutraalasendis. 2. Kontrolli, et aku pealüliti oleks asendis ON (süütepositsioon). Süttivad akulaadimis- ja õlirõhutuli ja käivitub audiosignaal. 3. Liiguta kiiruse/käigukasti kang maksimaalse kiiruse positsiooni, veendu, et sidur on lahutatud asendis. 4. Sõltuvalt temperatuurist
keera starteri lüliti eelsoojendusasendisse ja hoia seda 10-20 sekundit. Seejärel keera starteri lüliti käivitusasendisse. Vabasta lüliti koheselt kui mootor on käivitunud. Signaaltuled ja aku laadimistuled peavad seejärel kustuma. 5. Kui mootor ei käivitu aku tühjenemise tõttu, lülita akulüliti teisele akule ja korda stardiprotseduuri. 6. Kui mootor ei käivitu 15 sekundi jooksul vaatamata sellele, et
akud on täis, vabasta lüliti ja selgita välja põhjus. Starteri
mootoril tuleb enne järgmist käivitust lasta jahtuda umbes 15 sekundit. 7. Väga külma ilmaga (alla 10 kraadi), võib osutuda vajalikuks suurendada eelsoojendusaega 30 sekundini ja starteri käivitusaega kuni 1 minutini.
Starteri lüliti
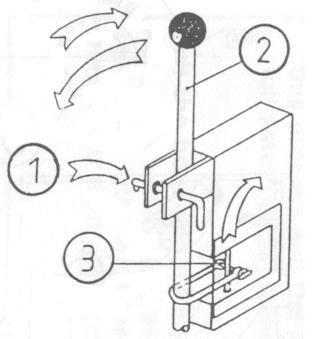
31 Paadi vabastusmehhanismi kasutamine
Vabastamine tavaolukorras :
- Pööra stopperpolti (1) ja tõmba see pesast välja
- Kui paat jõuab vette vabastab
ujuk vabastusmehhanismi
stopperi (3).
- Tõmba kang (2) kiiresti alla, mis vabastab paaditalid juhul, kui nad on
koormatud .
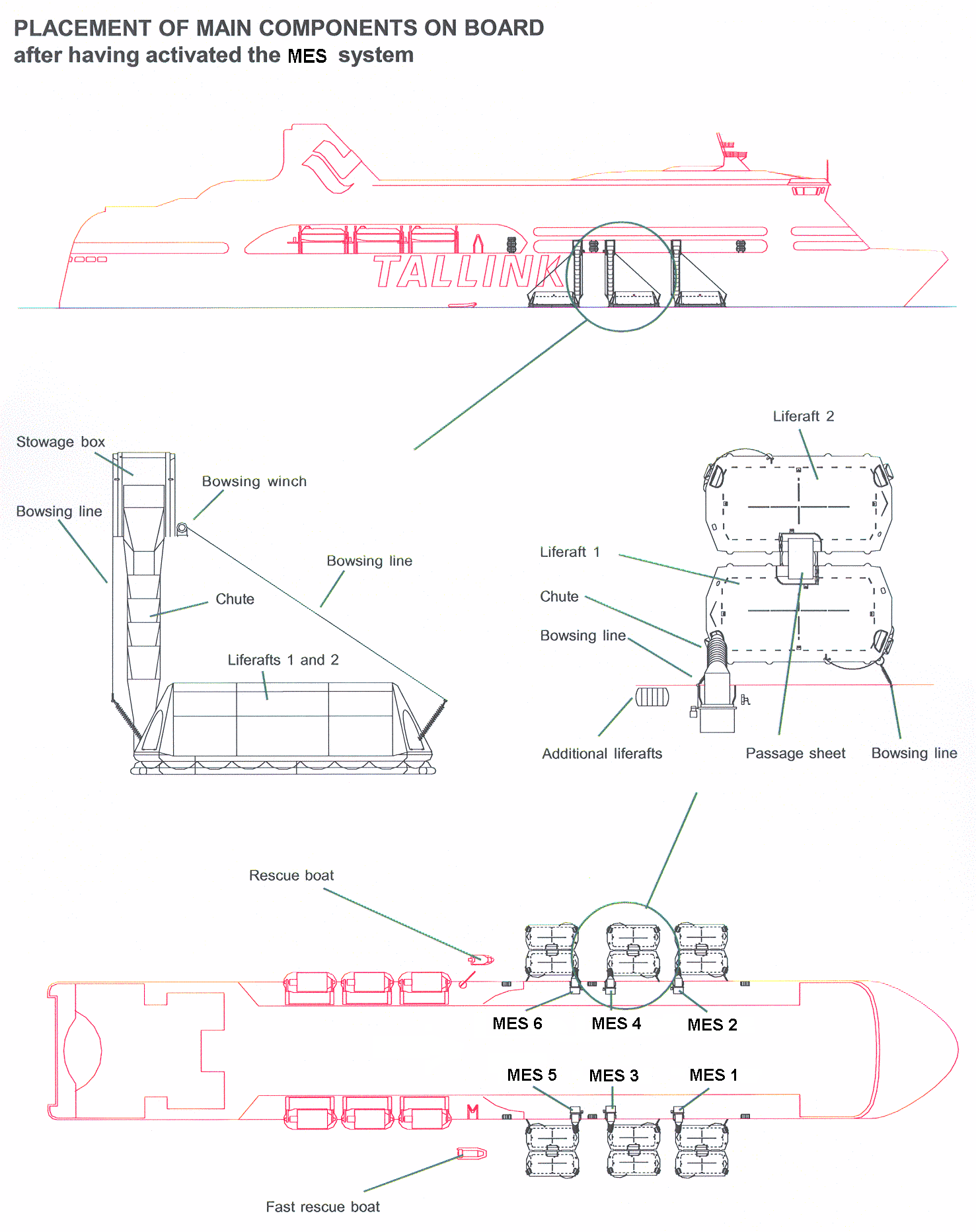
Mere Evakuatsiooni-Süsteem (MES)
IMO/SOLAS EVAKUATSIOONISUKA TÄHISTUS
Laevale on paigaldatud 6 vertikaalset evakuatsioonisukka, mis asetsevad 6. tekil. MES jaamade
mahutavus on :
MES-jaam Mahutavus (inimest)
MES 1 (vööripoolne PP) 4x101=404
MES 2 (vööripoolne VP) 4x101=404
MES 3 (keskosa PP) 4x101=404
MES 4 (keskosa VP) 4x101=404
MES 5 (ahtripoolne PP) 4x101+51=455
MES 6 (ahtripoolne VP) 4x101+51=455
Üldmahutavus on 2526 inimest 6-s MES
jaamas .
Päästeparved
IMO/SOLAS PÄÄSTEPARVEDE TÄHISTUS
Laevale on paigutatud 24 täispuhutavat päästeparve
Viking DKS 100 (mahutavus 101
inimest) ja kaks Viking DKS 50 (mahutavus 51 inimest). Päästeparved asetsevad 6.tekil.
Pääs päästeparvedesse läbi MES-i.
32 MES PÕHIKOMPONENTIDE PAIGUTUS PEALE
EVAKUATSIOONISÜSTEEMI AKTIVEERIMIST
33 Süsteemi kasutamine
Kui kapten annab korralduse evakuatsioonisüsteemi meeskondadele minna MES jaamadesse,
peavad MES jaamade liikmed koheselt minema MES jaamadesse. Kui MES jaama meeskond on
koos, kannab MES jaama juht ette navigatsioonisilda MES kogunemise kohta. Peale seda
panevad MES jaama meeskonna liikmed selga termokostüümid. Seejärel kannab MES jaama
juht silda ette, et ollakse valmis MES käivitamiseks.
Vastavalt sillast saadud korraldusele käivitatakse evakuatsioonisüsteem.
Etapid evakuatsioonisüsteemi
kasutamiselEtapp 1 : Reisijad on evakuatsiooniks ette valmistatud. Valvepaat on veesatud. Vastavalt kapteni korraldusele tõmbavad evakuatsioonisüsteemide juhid
evak . süsteemi aktiveerimise kangi, et lasta vette evakuatsioonisüsteem koos parvega. Evakuatsioonisüsteemi juht pingutab
parve vangliini (fikseerib parved laeva parda ääres).
Etapp 2: Parveoperaator 1 laskub parvele. Kinnitab päästesuka parve nr.1 külge.
Etapp 3: Laskub parveoperaator 2. Parveoperaator 1 võtab vastu reisijad. Parveoperaator 2 kinnitab üleminekutee parvel 1 parve 2. Reisijad juhatatakse parve 2 kuni parve mahutavuse täitumiseni.
Etapp 4: Evakuatsioonisüsteemi juht annab korralduse vabastada parv nr.2 kui on
saadetud alla 100 inimest. Parveoperaator 2 siseneb parve nr.2 Parveoper. 2 vabastab parvest 2 üleminekutee ja viskab selle parve nr.1 Parveoperaator 2 lõikab läbi 2 ühendusliini parve 1 ja 2 vahel. Parveoperaator 1 kannab ette evakuatsioonisüsteemi juhile valmidusest.
Etapp 5: Parveoperaator 3 kontrollib, et ala parvekonteineri 3 kukkumisrajoonis on vaba ja vabastab konteineri 3 aluselt. Parveoperaator 3 laskub läbi suka parve nr.1 Parveoperaatorid 1 ja 3 haalavad parve 3 parve nr.1 juurde ja aktiveerivad Päästeparv 3 valmistatakse ette, ühendades selle parvega1 ja paigaldades üleminekutee 1 ja 3 parve vahele. Päästeparv täidetakse reisijatega vastavalt mahutavusele . Päästeparv 3 ühendatakse lahti päästeparvest nr 1. nagu on kirjeldatud etapp 4-s. Teisi parvesid käsitletakse samal
kombel ja järjestuses vastavate parveoperaatorite poolt.
34 Stage 6: Viimasena täidetakse reisijatega päästeparv nr.1 Kui viimane päästeparv täidetakse reisijatega vastavalt parve mahutavusele, sulgeb evakuatsioonisüsteemi juht sissepääsu evakuatsioonisüsteemi ja laskub parve nr.1. Päästeparv 1 eraldatakse evakuatsioonisukast ja laevast.
35 NAVIGATSIOON
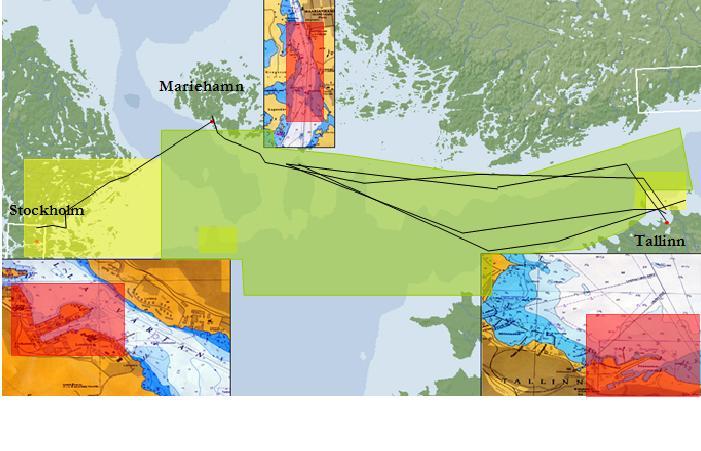
Teekond
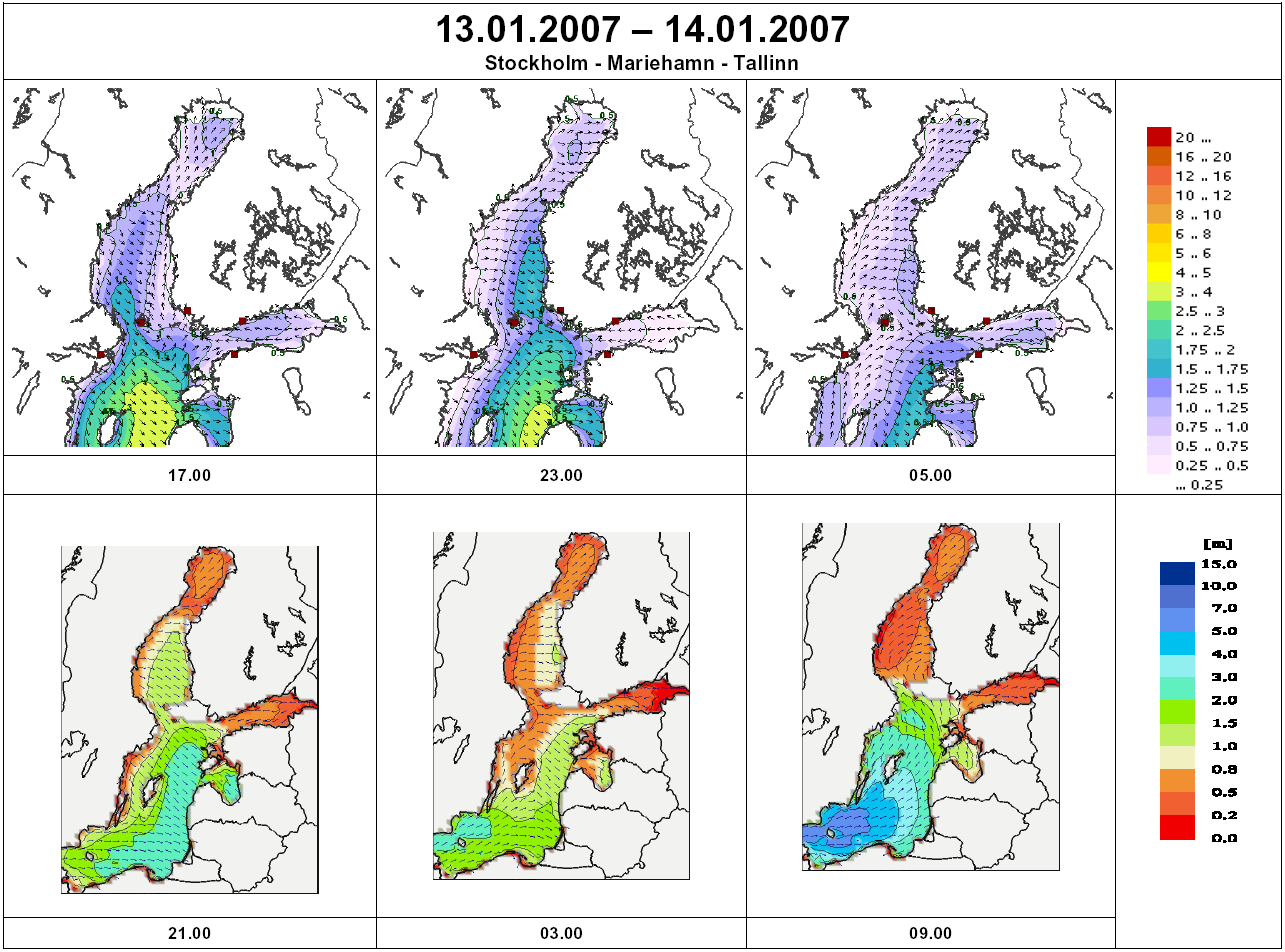
Soome lahe Läänemere skemaatiline joonis, tuulte roos ja sellest lähtuv routide valik
1. Reisi plaanid
Laeva elektronkaartide süsteemis kasutatavad teed:
1. Tallinn Mariehamn 2. Mariehamn
Stockholm 3. Stockholm Mariehamn 4. Mariehamn Tallinn
2. Routide valik
Kapten valib routi antud reisiks vastavalt tuule suunale tugevusele ning ilma ennustusele ja
kinnitab oma valikku vahetult enne sadamast väljumist, peale seda vahitüürimees sisestab
valitud roudi mõlemasse ECDIS'esse ning paneb paika ETA aegu nõutud pöörde punktis saades
kätte nõutud kiiruse marsruudi läbimiseks. Vahitüürimees valmistab ette ning paneb vastavas
järjekorras ka paberkaardid.
Igal roudil on oma spetsiifiline nimetus, mis nätab ära kapteni initsiaale ning marsruudi põhilisi
suundi.
Routide täiuslik nimekiri asub ECDIS'e vastavas menüüs.
All pool toodud skemaatilisel joonisel on ära näidatud musta joontega routide põhilised suunad.
3. Navigatsiooni alad
All pool toodud joonisel on ära märgitud rohelise, kollase ja punase värviga navigatsiooni alad
ning järgmises tabelis on lahti kirjutatud nende alade navigatsiooni vahi koosseis ning nõutud
toimingud ja sätingud seotud jõu ning navigatsiooni seadmetega.
4. Ohutuse tagamine
Vastavalt olukorrale ja meresõiduohutusele võib kapteni korraldusele esineda kõrvalekaldeid
antud protseduurist.
36 PUNANE TSOON KOLLANE TSOON ROHELINE TSOON
Sadama ala VTS ala Väljaspool VTS- ja
1. SILLAS: 1. SILLAS: sadamaal Kapten/vanemtüürimees Kapten/vanemtüürimees 1. SILLAS: 2 vahitüürimeest; ja vahitüürimees ning ja vahimadrus vahimadrus; lühibriifing vahitüürimees;vahimadru 2. KÜLALISED: Lubatud
2. KÜLALISED: ei ole s kapteni loal lubatud 2. KÜLALISED: Lubatud 3. JUHTIMISSÜSTEEM:Au
3. JUHTIMISSÜSTEEM: kapteni loal tomaatrool (
Radius /Nav. Käsirool 3. JUHTIMISSÜSTEEM: Computer
control )/
4. ROOLIPUMBAD: 4 töös Automaatrool/ käsirool käsirool
5. SIDEVAHENDID: 4. ROOLIPUMBAD: 4 töös 4. ROOLIPUMBAD: min. 2 VTS/sadama töö- 5. SIDEVAHENDID: VHF töös
Kanal ; FM raadio ch. 16, VTS töökanal 5. SIDEVAHENDID: VHF väljas 6. NAVIGATSIOONIVAHE ch. 16, GOFREP alal
6. NAVIGATSIOONIVAH NDID: ECDIS2 HAP vastav töökanal
ENDID : ECDIS2 HAP mode, ECDIS1: Safety 6. NAVIGATSIOONIVAHE mode, ECDIS1 Settings, ETA vajalikku NDID:
Radarid : Range -
7. STABILISAATORID: teepunkti erinevatel skaaladel, Sees 7. STABILISAATORID:
Filters , AIS info,
rings ;
8.
ANKRUD : valmis Sees ECDIS2 HAP mode, allalaskmiseks 8. ANKRUD: valmis ECDIS1: Safety Settings,
9.
MASINAD : allalaskmiseks ETA vajalikku teepunkti
Abimasinad: vähemalt 2 9. MASINAD: 7. STABILISAATORID: L.I.C: OFF Masina kontrollruum Sees/väljas 100% power: ON/OFF informeeritud 8. ANKRUD: Mereklaarid Abimasinad: vähemalt 2 9. MASINAD: Peamasinad: 1 või 2 võllil Abimasinad:vähemalt 1 või RPM Mode: COMB./
CONST . reziim võlli- generaatori reziim L.I.C: ON/OFF Peamasinad: 1 või 2 võllil 100% power: ON/OFF RPM Mode: COMB./CONST. reziim L.I.C: ON 100% power: ON/OFF
37 38 Vaatlus
Jälgijate kasutamine, jälgimise toimine, täiendavate jälgijate kutsumine.
Laev peab alati pidama vajalikku nägemis- ja kuulmisvaatlust ning kasutama kõiki
olemasolevaid, valitsevates oludes ja tingimustes sobivaid vahendeid, et igakülgselt hinnata
olukorda ja kokkupõrkeohtu.
PUNANE TSOON KOLLANE TSOON ROHELINE TSOON Sadamaala VTS ala Väljas pool VTS ja sadama ala SILLAS: SILLAS: SILLAS: Kapten/vanemtüürimees Kapten/vanemtüürimees ja 2 vahitüürimeest; vahimadrus ja vahitüürimees ning vahitüürimees;vahimadrus vahimadrus
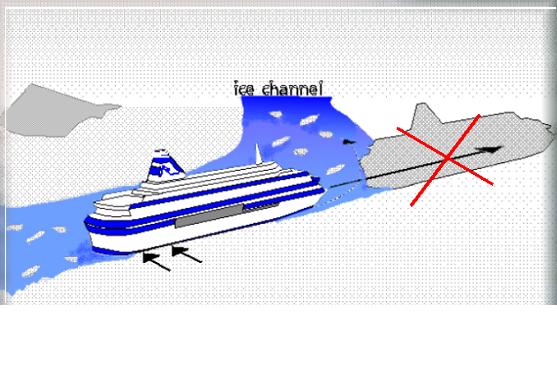
39 Navigeerimine jääs Pilt ja tähelepanekud jääs navigeerimiseks
veekindlad uksed
tagamiseks
e
labade vigastuste tekke tõenäosus suurem
isi sagedusega, mis kindlustab lekke õigeaegse avastamise
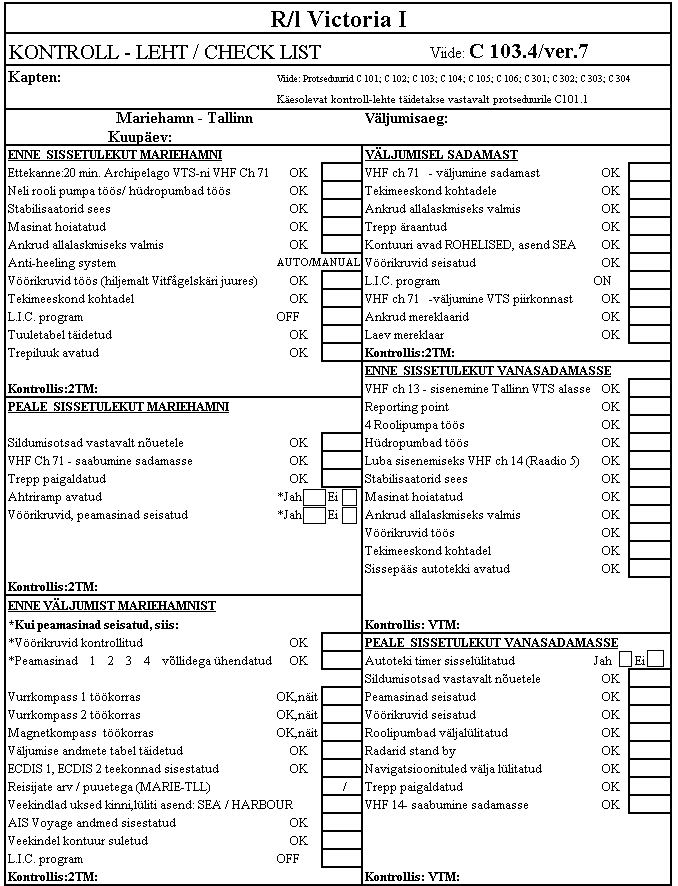
40 Navikatsiooni protsetuurid
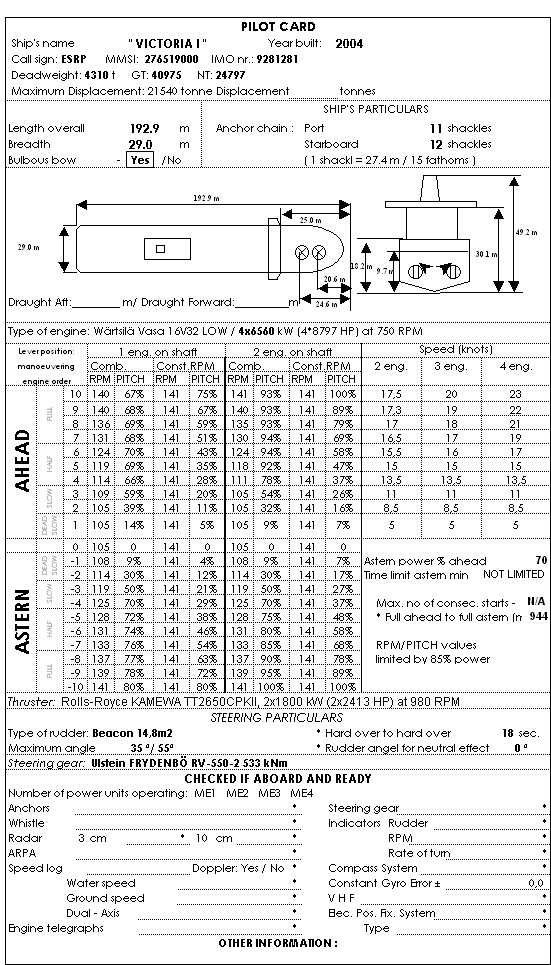
41 42 43 44 Pilot card
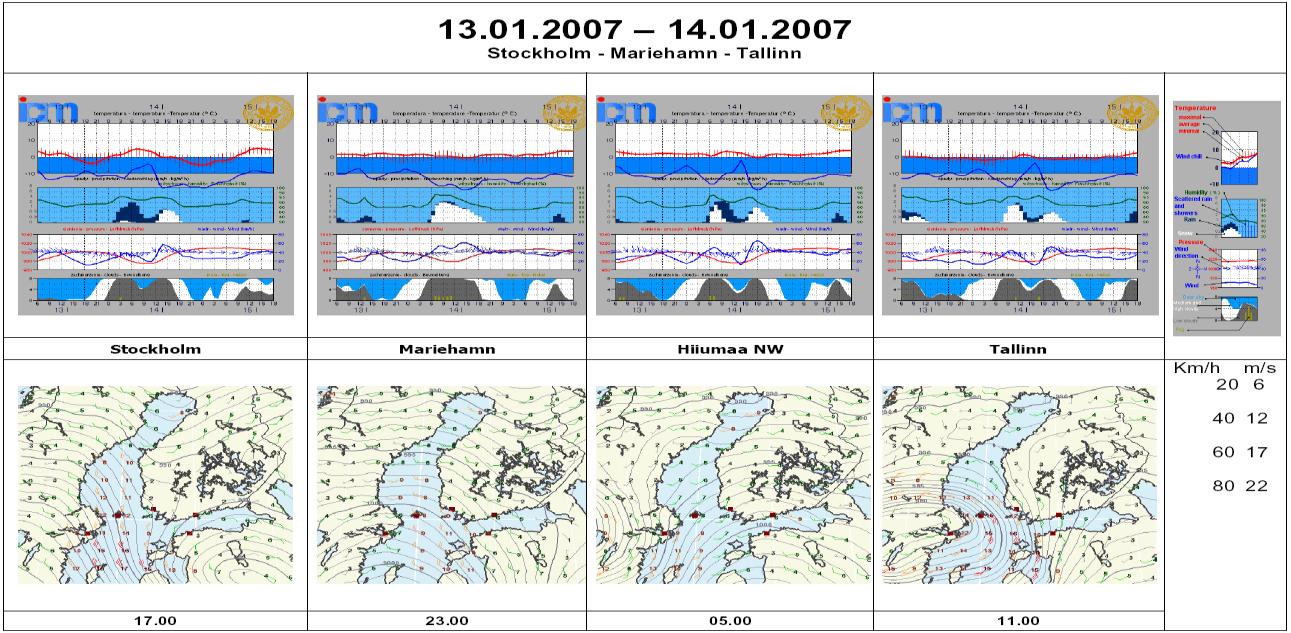
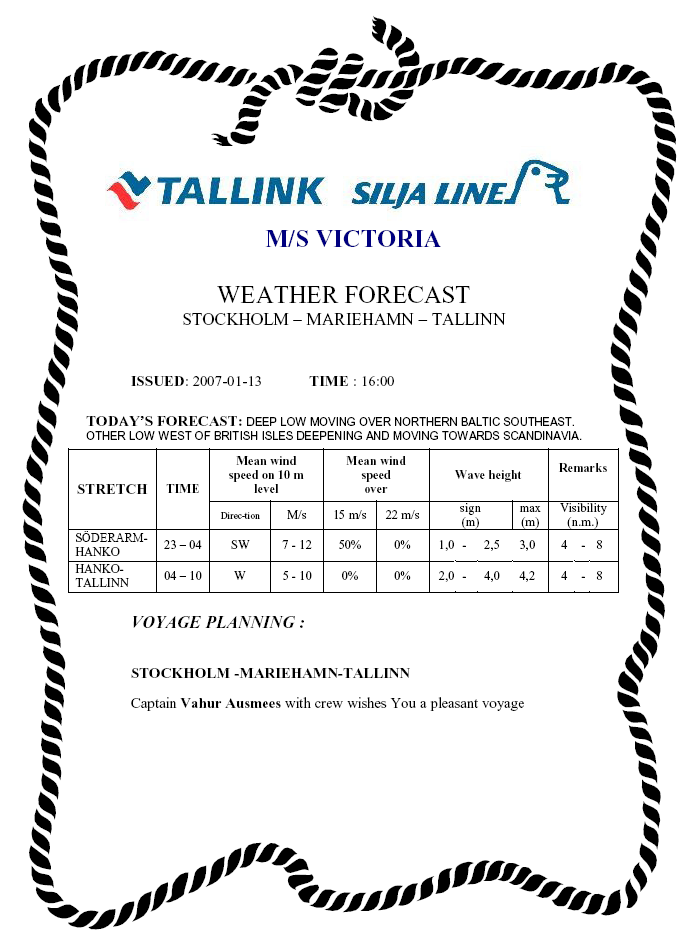
45 Ilma prognoosi ettevalmistamine
Ilma
prognoosid saadakse järgmistest allikatest:
NAVTEX
Interneti lehekülgedelt: www.smhi.se, www.
fimr .fi, meteo.icm.edu.pl, falowanie.icm.edu.pl,
www.segel.aland.fi,
vip.foreca.com.
Enne laeva väljumist, koostatakse ilma prognoos reisiks 4 tüürimehe poolt.
Näide:
Ilma prognoos silda:
46 Ilma prognoos reisijatele:
47 LAEVAJUHTIMIS SEADMED
RollsRoyce
9a 8a 2a 1 2b 8b 9b
5a 7a 3a 4 3b 7b 5b 6a a 6b
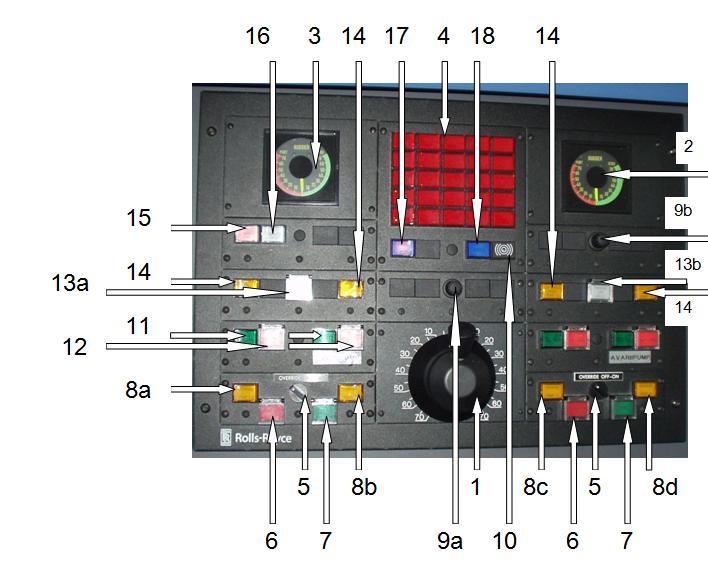
Rolls-Royce CPP keskjuhtimispult sillas.
1. Juhtimiskoha keskpuldile nõudmine ja masinapuldile andmine
2. Sõukruvi sammu näidikud
3. Vasaku- ja paremparda sõukruvi juhtimiskangid
4. Lambikeste korrasoleku kontroll ja valgustugevuse dimmer
5. Backup-kangike ja backup-
reziimile ülemineku nupud
6. Sõudeseadmete koormuse ohjeprogrammi (L.I.C.) sisselülitus
7. Püsipöörete reziimi valik (Const RPM Mode sisse-väljalülitus)
8.
Sidurite ühendatuse
indikaatorid ja avariiline lahutamine
48 9. Süsteemi häirete
indikatsioon ja kontrollprogrammi
resetRolls-Royce KaMeWa CPP
Muudetava sammuga sõukruvi juhtsüsteemi üldkirjeldus.
Rolls-Royce KAMEWA muudetava sammuga sõukruvi (edaspidi CPP ingl. k. Controllable
Pitch Propeller) võimaldab laeva juhtida nii edasi kui tagasikäigul muutes sõukruvi sammu,
samas kui jätkub tema pöörlemine ühes suunas.
Juhitavuse parandamiseks muudetakse ka
sõukruvi pöörlemiskiirust kindla nn. Combinator Mode karakteristiku alusel (vt. Diagramm 1 ja
2 Sõukruvi karakteristikud) . Kruvi sammu juhtimine võib toimuda ka sõukruvi püsipööretel,
kus peamasinad töötavad täiskäigul 750 p/min. siis on tegemist nn.
Constant RPM Mode
reziimiga.
Juhtimist teostatakse kontrollerikangidega vastavatel juhtkonsoolidelt. Juhtkangide asendi
muutmisega antakse keskjuhtimissüsteemile käsklus genereerida sõukruvi sammu käsklussignaal
vastavalt juhtkangi asendile mida enam keeratakse juhtkangi, seda suuremale kruvi sammule
vastav signaal genereeritakse, seda suurema sammu võtab kruvi. Samaaegselt sammu
muutmisega genereeritakse sõukruvi pöörlemiskiiruse muutmise signaal, mis suunatakse
peamasinate pöörete regulaatorile (
esmalt elektroonilisele ,,Woodward Digital Control 723
PLUS " ja sealt edasi "Woodward PGA-EG Governor" regulaatorile peamasinal). Suhteline
vahekord sammu ja pöörete vahel määratakse elektroonilises keskjuhtimisseadmes vastavalt
sinna salvestatud kombinaatorkarakteristikule (elektrooniliselt salvestatud
graafik , mis määrab
sõukruvi sammu ja pöörded sõltuvalt juhtkangi asendile, paralleelselt töötavate peamasinate
arvule ja valitud tööreziimile).
Vältimaks peamasinate kiiret koormuse kasvu (ja ka kahanemist) on süsteemi integreeritud
koormuse kontrolli funktsioon L.I.C. (Load
Increase Control). Kui L.I.C.-süsteem on sisse
lülitatud (Foto 1 p.6), siis annab sellest märku vastav indikaatorlambike "L.I.C.". Koormuse
kontrolli süsteem tagab juhtkarakteristiku jälgimise
selliselt , et ei toimuks ülemääraselt kiiret
koormuse kasvu, kui juhtkangid kohe "põhja" keerata. Peale selle, kui L.I.C. ei ole sisse
lülitatud, siis piirab L.I.C. ikkagi peamasinaid ülekoormuse eest sellest annab märku L.I.C.-
lambikese aeg-ajaline süttimine järsult kasvavate koormuste korral.
Täiendusena pea-juhtsüsteemile on CPP juhtsüsteemi kaasatud ka reserv-juhtimissüsteem
(backup system). Backup süsteem on sõltumatu peasüsteemist - kui peasüsteemis tekib tõsine
rike ja temaga ei saa sõukruvi juhtida siis lülitades silla keskpuldil sisse nupu "Backup System
On" läheb CPP juhtimine üle reservreziimile ning nii silla, kui ka masina juhtpuldil süttib
vastav sinine signaallamp "Backup Mode". Reservsüsteem ei oma nn. jälgivat funktsiooni, s.t.
seal ei sõltu sõukruvi samm juhtkangi ("Joystick" ) kallutusnurgast, vaid sellest, kui kaua seda
ühes või teises asendis hoida (andes käsklusi edasi- või tagasikäigule).
NB! Mõlema parda Joystick- tüüpi juhtkangikesed asuvad ainult silla keskpuldil mitte tiibadel!
Reservjuhtimiskangil (Foto 1; p. 5a, 5b) on vaid 3 juhtasendit:
1) Keskasend, milles kruvi samm ei muutu,
2) Edasi (
AHEAD ) millises asendis hoides liigub kruvi samm edaspidi käigule ja
3) Tagasi (ASTERN) milles kruvi samm liigub tagurpidi käigu asendi suunas.
49 Mõlemal, nii "Edasi" (AHEAD) kui ka "Tagasi" (ASTERN) käskluse puhul, (kui juhtkangikest
hoida piisavalt kaua) toimub sammu muutus kuni lõppasendini välja, s. t. kuni täiskäik edasi või
täiskäik tagasi. Kui on vaja täiskäigule vastavast sammust väiksemat sammu, siis tuleb
reservjuhtimise kangike soovitud sammu saavutamisel vabastada (lasta tal minna keskasendisse).
Reservjuhtimisel antakse elektriline juhtsignaal otse vahetult vastava suuna AHEAD/ASTERN
reservjuhtimise klapi V2 solenoididele NB! Need on erinevad peasüsteemi (Main System)
servoklapi V3 juhtsolenoididest. Sellega tagatakse süsteemi üldine töökindlus ja
toimimine Backup reziimis.
Sammu asendit Backup reziimis kontrollitakse
visuaalselt sammu asendi näidikult. Minnes üle
reservjuhtimisele, lähevad peamasinate pöörded automaatselt reservreziimi pööretele 635 P/min,
mis vastab sõukruvi pööretele ca 121 P/min.
Reservjuhtimissüsteem on elektriliselt eraldatud peajuhtimissüsteemist,
omades selleks ka eraldi
toite automaatlülitit , tagamaks sammu muutmise (laeva juhitavuse) peasüsteemi rikke korral. Ka
sammu asendi indikatsioon ja CPP juhtpultide valgustus on elektriliselt eraldatud peasüsteemist
ning omab eraldi automaatlülitit.
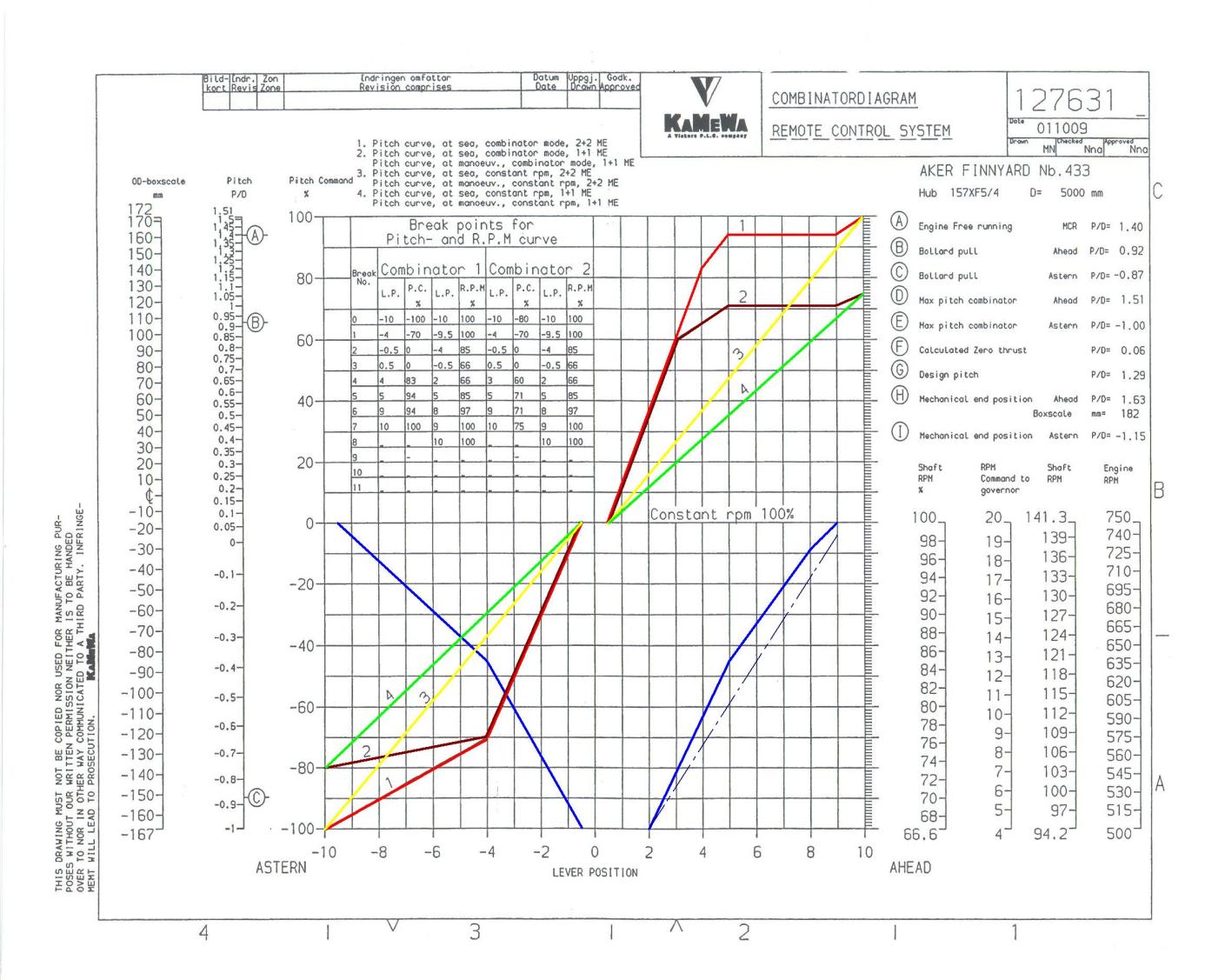
50 Rolls-Royce KaMeWa muudetava sammuga sõukruvi karakteristikud.
1.
Kombinaator -reziimis: Joon 1 - kahe PM töö korral Joon 2 ühe PM töö korral 2. Konstant-pöörete reziimis: Joon 3 kahe PM töö korral Joon 4 ühe PM töö korral 3. Pöörete graafik kombinaator-
reziimil : projekteeritud -
ligikaudne katseline
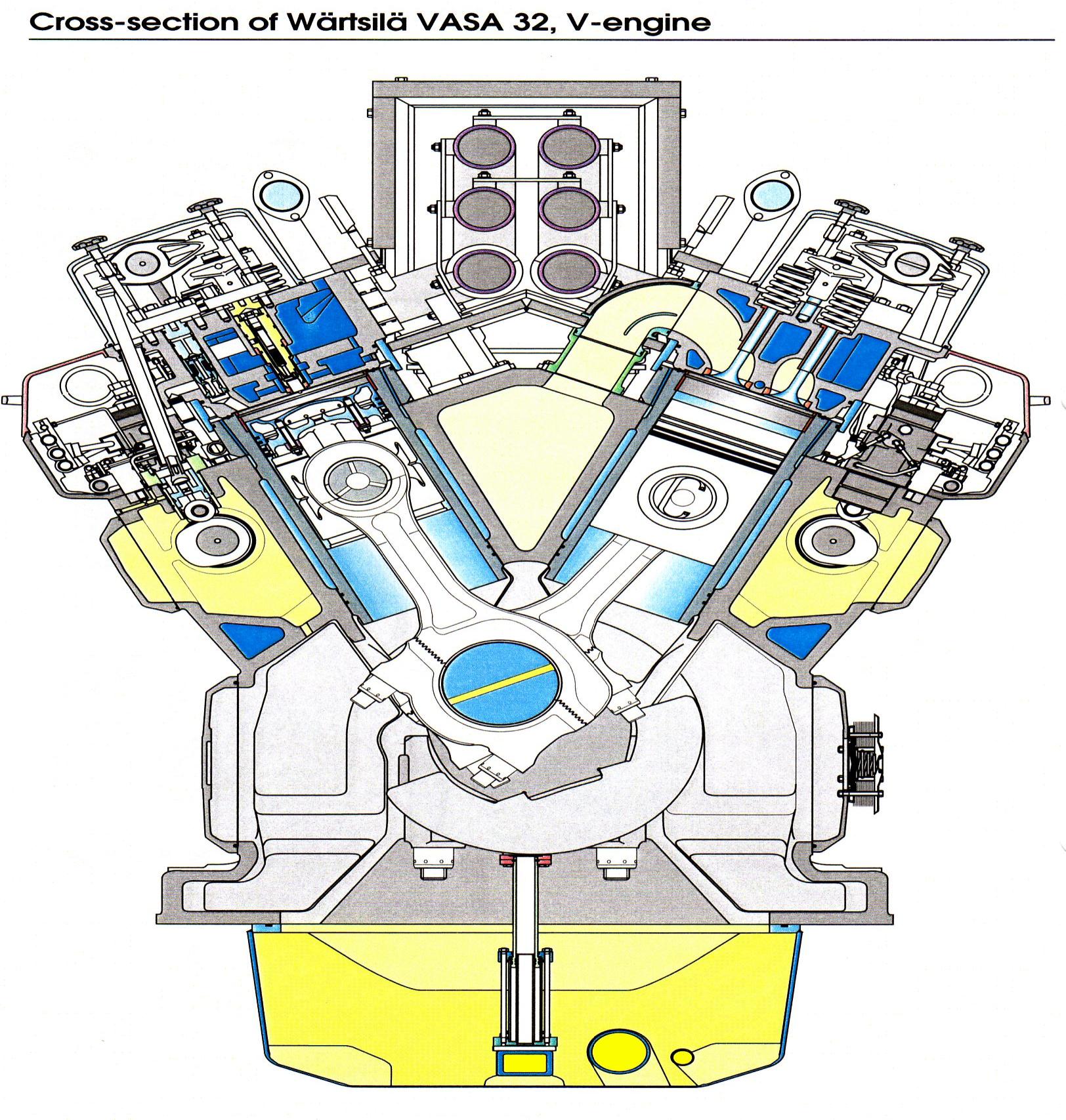
51 Peamasin
52 Peamasinate väljumiseks ettevalmistamine
30 MIN. ENNE VÄLJUMIST:
VAHITÜÜRIMEES HELISTAB MASINASSE,
TEATAB KaMeWa KONTROLLIMISE ALGUSEST MASINAST ANTAKSE KaMeWa SÜSTEEMI JUHTIMINE SILDA VAHITÜÜRIMEES TEOSTAB KaMeWa KONTROLLI, TEATAB TELEFONI TEEL TULEMUSTEST MASINASSE VAHIMEHAANIK VÕTAB KaMeWa JUHTIMISE MASINASSE
10 MIN. ENNE VÄLJUMIST:
VAHITÜÜRIMEES HELISTAB MASINASSE JA TEATAB VASTAVALT KAPTENI KORRALDUSELE, MITU PEAMASINAT KÄIVITADA
5 MIN. ENNE VÄLJUMIST:
MASIN KÄIVITAB NÕUTUD PEAMASINAD MASINATE ÜHENDAMISEST ANNAVAD SILLAS MÄRKU SIGNAALTULED JA LÕPLIKU KINNITUSENA ANNAB MASIN KaMeWa JUHTIMISE ÜLE SILDA, VAHITÜÜRIMEES KVITEERIB "
BRIDGE ACCEPT "
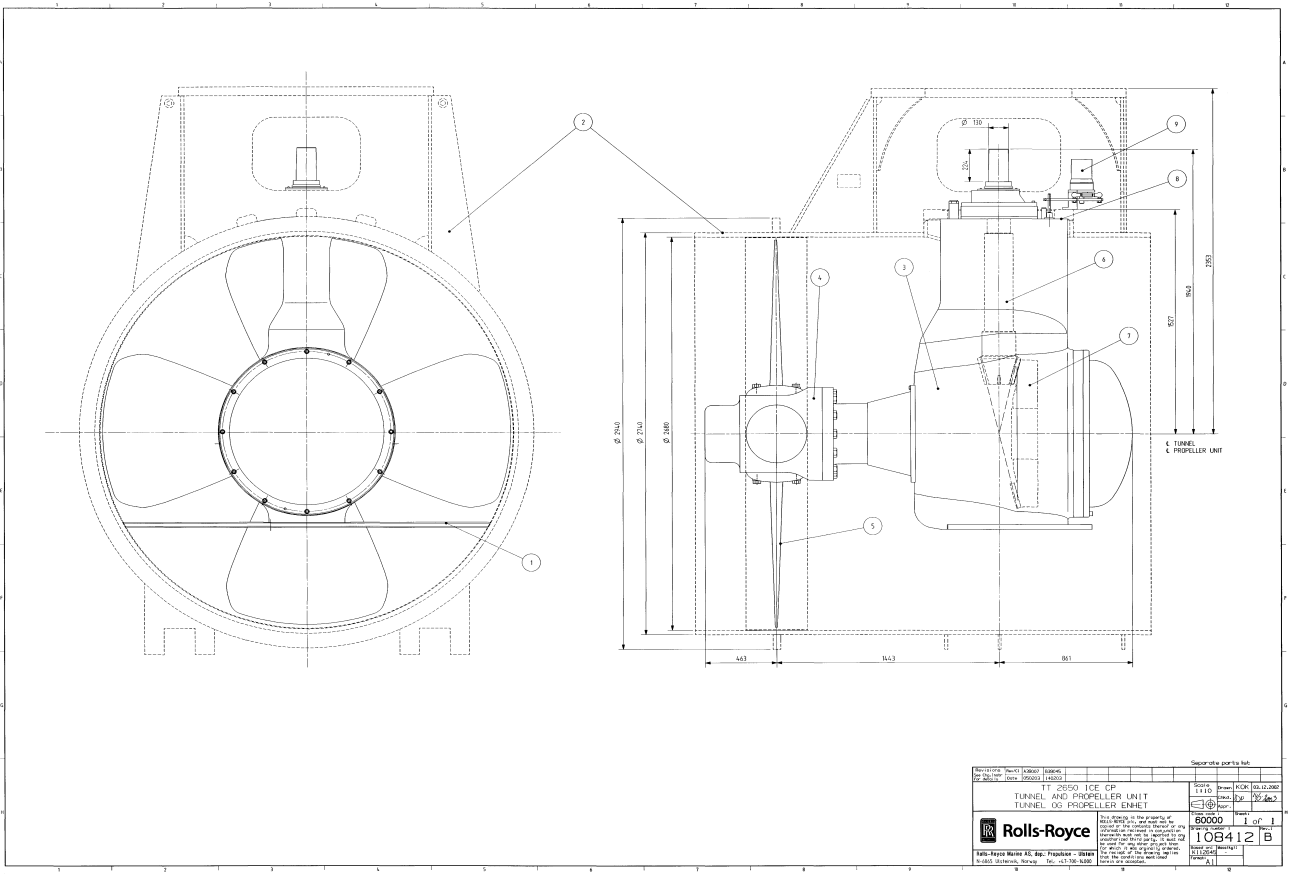
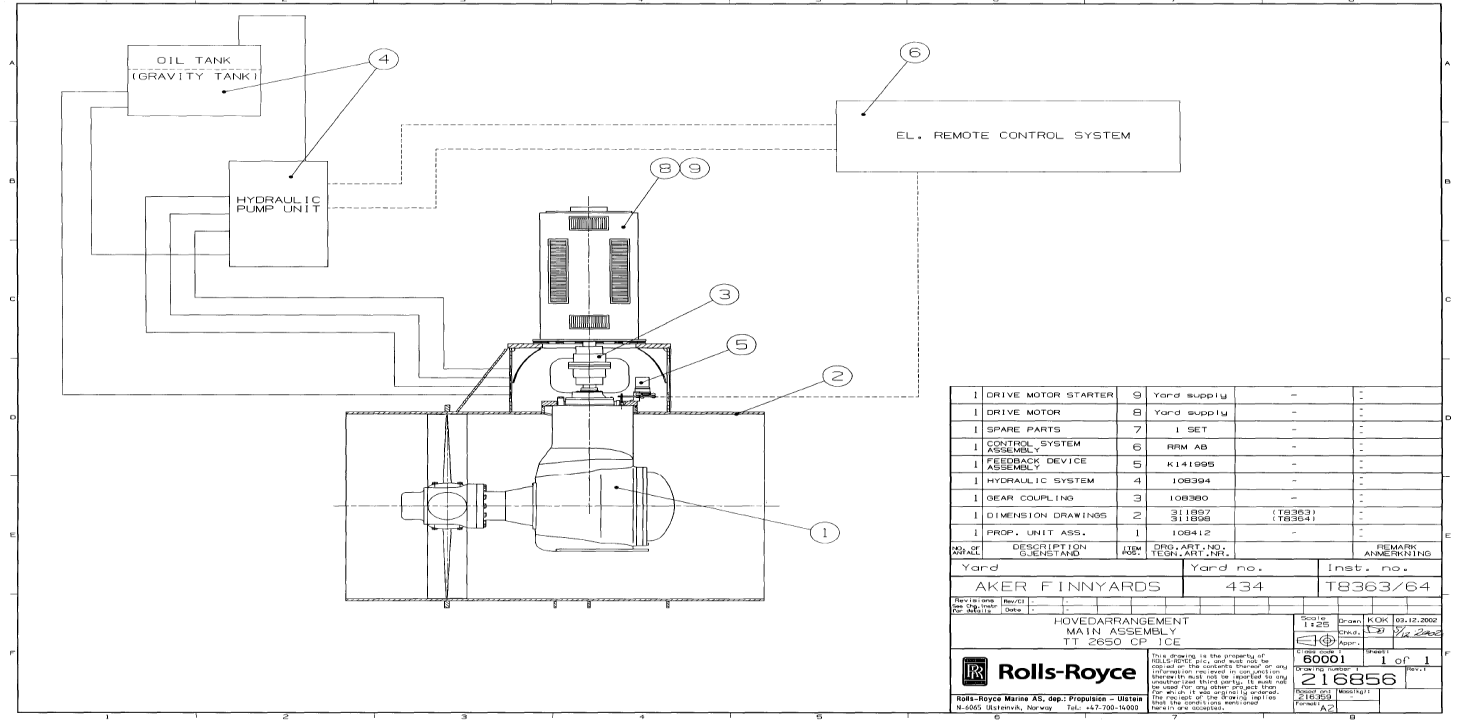
53 Trasterid
54 Vöörikrunide väljumiseks ettevalmistamine ja väljalülitamine
60 MIN. ENNE VÄLJUMIST:
VAHITÜÜRIMEES VAJUTAB ALLA NUPUD HYDR. START MÕLEMA VÖÖRIKRUVI KONTROLL-
PULDILVAHETULT ENNE VÄLJUMIST:
VAHITÜÜRIMEES VAJUTAB ALLA NUPUD DRIVE
MOTOR START MÕLEMA VÖÖRIKRUVI KONTROLL-PULDIL VAHITÜÜRIMEES VEENDUB KOORMUSE OLEMASOLUST VÖÖRIKRUVIDELE
VAHETULT PEALE SADAMAST LAHKUMIST:
VAHITÜÜRIMEES VAJUTAB ALLA NUPUD DRIVE MOTOR STOP MÕLEMA VÖÖRIKRUVI KONTROLL-PULDIL VAHITÜÜRIMEES VAJUTAB ALLA NUPUD HYDR. STOP MÕLEMA VÖÖRIKRUVI KONTROLL-PULDIL
Vöörikruvide töö kontroll
Enne, kui on võimalik käivitada vöörikruvisid, peavad tiibstabilisaatorid olema sisse
tõmmatud, vastasel juhul on vöörikruvide start blokeeritud.
Tavaolukorras juhitakse vöörikruvide tööd navigatsioonisillast. Enne vöörikruvi
käivitamist tuleb veenduda, et nende samm on null-asendis, vastasel juhul on start
blokeeritud. Kui samm ei ole null, peab vahitüürimees käivitama vöörikruvi
hüdraulikapumbad ja seadma kruvide sammu null-asendisse. Rikke korral juhtahelas on
võimalik seada samm nulli vöörikruvi ruumist, manipuleerides otse juhtsolenoididega,
kuid sellisel juhul on ka kruvi sammu reguleerimine võimalik vaid lokaalselt. Juhul kui ka
vöörikruvide enda ajamimootorid ei käivitu sillast (näiteks rikke tõttu juhtahelas), on
võimalik need käivitada peajaotuskilbilt eelnevalt seades nende käivituskoha lülitid PJK
paneelidel asendisse
LOCAL . Vöörikruvide automaatlülitite asend on pidevalt näidatud
miimikapaneelil.
Vöörikruvide automaatlülitid lahutuvad, kui peaks juhtuma voolukatkestus (Blackout) ja
diiselgeneraatorite
toide pole nende rikke tõttu saadaval. Sellises eriolukorras tagavad PJK
toite võlligeneraatorid. Esimesena lülitub lahti vöörikruvi BT1, siis BT2 (SG1 toide lülitub
ümber BT1 toitelt PJK vasakule pardale ja SG2 toide 5 sekundilise viivitusega PJK
parema parda toitele).
55 ROOLIMINE
Rooli keskpaneeli elemendid
1. Jälgivrooli
manipulaator (juhtkang);
2. Paremparda
roolilaba asendi
indikaator ;
3. Vasakparda roolilaba asendi indikaator;
4. Alarmsignaalide valgusindikatsiooni
paneel 25 lampi;
5. Rooli reservjuhtimise lüliti "VÄLJA - SISSE" (OFF-ON);
6. Reservjuhtimise
nupp "
ROOL VASAKULE" (PORT);
7. Reservjuhtimise nupp "ROOL PAREMALE" (STBD);
8a Roolipump Nr. 1 reservjuhtimisel;
8b. Roolipump Nr. 2 reservjuhtimisel;
8c. Roolipump Nr. 3 reservjuhtimisel;
8d. Roolipump Nr. 4 reservjuhtimisel;
9a Lambi ja skaalavalguse dimmer;
9b. Varudimmer;
10. Alarmsignaali zummer;
11. Roolipumpade Nr. 1 - 4 käivitusnupud ja nende töösoleku indikatsioon;
56 12. Roolipumpade Nr. 1 - 4 stoppnupud;
13a Vasakparda rooli suurte pöördenurkade blokeeringu lüliti;
13b. Paremparda rooli suurte pöördenurkade blokeeringu lüliti;
14. Roolipumpade Nr. 1 - 4 suurte pöördenurkade blokeeringu indikatsioon (lambid põlevad, kui rooli saab keerata ainult nurgani 35° VP/PP);
15. Juhtimise keskpuldile võtmine: lülitusnupp ja indikatsioonlamp "ROOL SÜNKROONSEL JÄLGIVREZIIMIL" (IN COMMAND SYNCHRO) - mõlemat roolilaba keskpuldilt juhitakse sünkroonselt jälgivreziimil;
16. Juhtimise automaatroolile lülituse nupp ja indikatsioonlamp "ROOL AUTOMAATREZIIMIL"
17. Alarmpaneeli testnupp (
vajutades põlevad alarmi indikaatorlambid ja töötab zummer);
18. Alarmsignaali kviteerimine (esimesel vajutusel pärast alarmsignaali jääb zummer vait, indikaatorlamp vilgub; teistkordasl vajutusel vilkumine asendub pideva
valgusega , kui hälve kestab ja kustub, kui hälve
kadus )
57 Käsirool
26 27
28a 28b
29 30
28
c
31 28d
32 34
33
Silla käsirooli
pult .
Silla käsirooli puldi elemendid:
26. Gürokompassi repiiter; 27. Magnetkompassi repiiter; 28a. Gürorepiiteri skaalavalgustuse dimmer; 28b. Magnetkompassi repiiteri skaalavalgustuse dimmer; 28c. Roolilabade pöördenurga indikaatorite skaalavalgustuse dimmer; 28d. Käsirooli pöördenurga skaala valgustuse dimmer; 29. Vasakparda roolilaba pöördenurga indikaator; 30. Paremparda roolilaba pöördenurga indikaator; 31. Juhtimise käsirooli puldile võtmise käsklusnupp ja juhtimise käsiroolil oleku indikaatorlamp; 32. Käsirooli skaala valgustus; 33. Käsirooli ratas rooli
juhtimiseks jälgivreziimil; 34. Käsirooli käskluse pöördenurga skaala;
58 Roolimasina andmed
Tüüp: RV 550-2
Balleri diameeter 390 mm
Max hüdraulikaõli rõhk 94 bar
Max kaitseklapi seadistusrõhk 94 bar
Max roolinurk 2 x 55°
Arvestuslik jõumoment 666 kNm
Õli tööväljasurve ruumala nurkliikumisel (35°-0-30°) = 65° 81 liter
Roolilaba liikumisaeg ühe
pumbaga nurkliikumisel (35°-0-30°) = 65° max. 28 sec
Roolilaba liikumisaeg kahe pumbaga nurkliikumisel (35°-0-30°) = 65° max. 14 sec
Õli hulk rooli(täitur)- masinas 170 liter
Pumbaseadmes (2x500+900 l) 1900 liter
Torustikus (ja survevoolikutes) 50 liter
Õli hulk kokku 2120 liter
Rooli (täitur)- masina kaal õlita 4300 kg
Pumbaseade kaal õlita
2200 kg
Õli viskoosusindeks ca 100 (Viscosity: ISO 68)
Õli max lubatud temperatuur 70°C
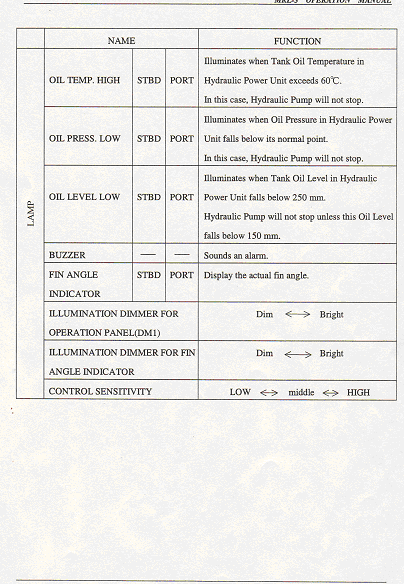
59 Stabilisaatorid
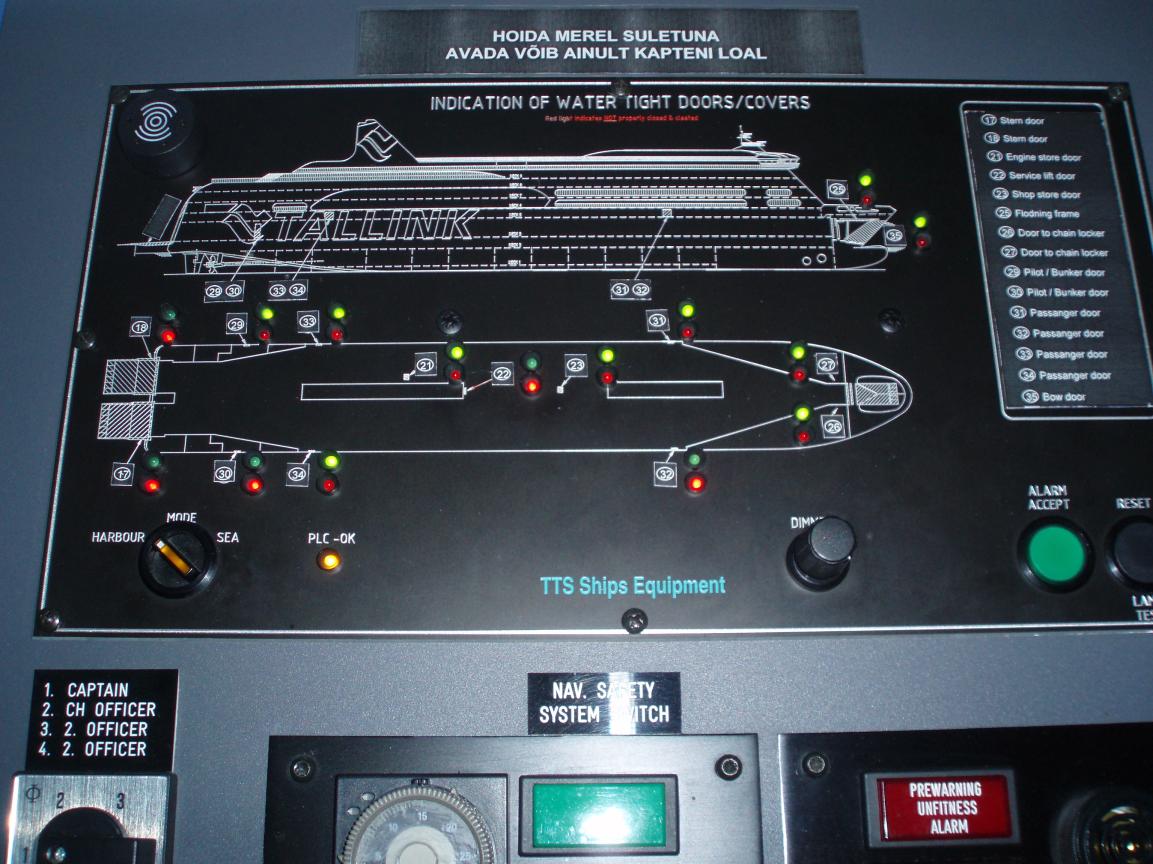
60 61 62 63 64 Veekindladuksed
7
1 2 3 4 6
5
1.Pealüliti(sulgeb kõik veekindlad uksed)
2.Alarmi aktsepteerimise nupp
3.
Tulede kontroll nupp
4.Tulede reguleerimise nupp
5.Veekindlate uste indikatsioon tuled
6.Punaselt märgitud uksed peavad olema merel suletud
7.Sadama ja mere reziimi lüliti
65 Veekindel kontuur
2 1
3 1
1 4
1 1
6 5 1 1 1.Reziimi lüliti 2.Indikatsioono tuled(Roheline-kinni,Punane-lahti) 3.Veekindlate uste
loetelu 4.Tulede test ja reset nupp 5.Alarmi aktsepteerimise nupp 6.Tulede reguleerimise nupp
66 ELEKTROONILISED LAEVAJUHTIMIS SEADMED
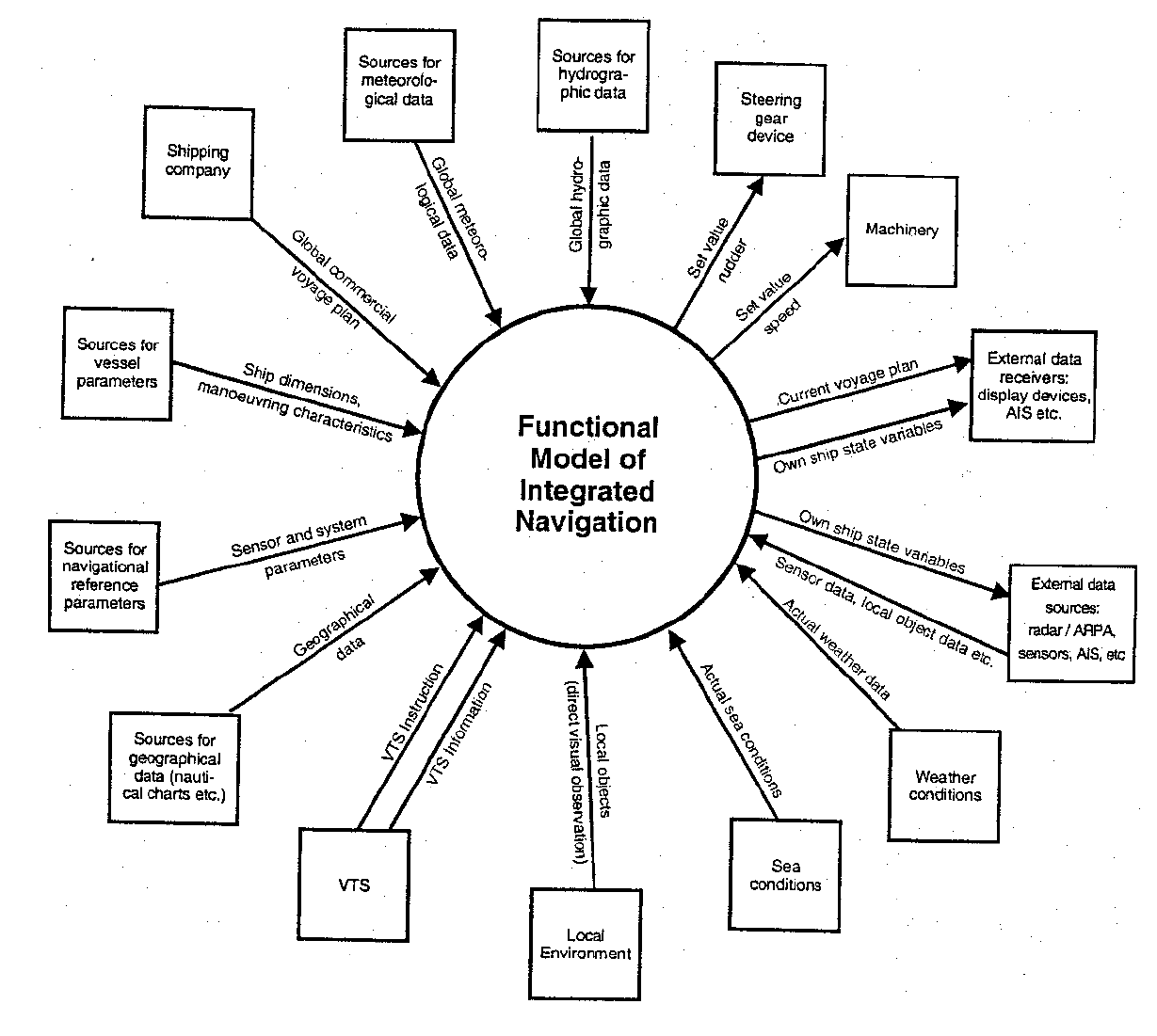
Integreeritud sild
Integrated Bridge Systems, can be
designed to include:
Console sections to form
primary Navigation and Ship Management Workstations.
Nucleus or Manta
ARPA , True or Relative
Motion Radar Systems Multi-Feature Displays that incorporate Integrated Navigation with ECS and ECDIS data
Manual Steering Workstation containing '
Follow -up' Helm
Unit with
Gyro and Rudder Angle Repeaters
Docking Workstations for open or enclosed bridge wings Safety Operations Workstation with
GMDSS and
external communications
equipment Overhead
Repeater Consoles Integrated
Adaptive Autopilot with Transmitting Magnetic Compass and Gyro Compass Systems Magnetic Compass with Reflector Binnacle Speed Log Echo Sounder Wind speed and Direction
Sensor Barometric Pressure and Air Temperature Sensor
Position -fixing Equipment (DGPS, GPS, LoranC and Decca) Watchkeeper's Chairs with Sliding Mounts Armrest-located Remote Control for radar/electronic
chart Internal Communication between Docking Workstations and Manual Steering Workstations Sound
Reception System to amplify external sounds
Other items of equipment as
required to provide a fully integrated bridge system that meets the
requirements of customers and the regulatory authorities.
67 68 Manta Radar
Sophistication, versatility and unrivalled
performance .
Manta is designed to meet the demands of today's
maritime industry.
Through the use of the very
latest in radar
technology , Manta delivers radar performance in the most challenging operational
situations.
Features and Benefits:
. Lightweight
flat screen display for
ease of mounting. . Complies with all ITU
Emissions Regulations . Internal map
storage : No need for Navcard . 1/8 nm (0.125nm) range scale:increased short range performance . Azimuth Stretch facility: Small targets seen more easily . AIS compatible: . VDR
Interface : Ready to connect to VDR . Curved
Heading Line: Visual
turn monitoring aid . Inclusive/Exclusive Acquisition Zones: More flexible, tailored
target acquisition . Tape
Measure : Point to point on screen measurement . Target Tote facility: Indicates the 6 most important targets . 2 x EBL: Two
bearings measured simultaneously . 2 x VRM: Two
ranges measured simultaneously . Maps with 16 Coloured
Symbols : Permits more sophisticated maps . Ergopod Remote Control: Increased operational flexibility
Transceiver & Antenna Options:
Antenna options: . 2m & 2.5m X
Band . 3.1m & 4m S Band
Upmast Transceivers: . 30 Kw S band, 25Kw and 10Kw X Band
Downmast Transceivers: . 30 Kw S band, 25Kw X Band
69 Radari menüü
Zone 1 - Radar System
(1) Standby, Run.
(2)
Selection of the Radar System.
(3) Short,
Medium , Long Pulse.
(4) Tuning of the selected Radar & Performance
Monitor.
(5) Correlation & Interference Rejection.
(6) Enhancement of Radar Signals &
Sector Scan.
Zone 2 - Screen Mode of
Operation 262 (1) Range and Rings.
(2) Relative Motion, Relative
Trails RM(R).
(3) True Motion, True Trails TM(T) (
Optional ).
(4) Relative Motion, True Trails RM(T) (Optional).
(5)
North Up.
(6)
Course Up.
(7) Head Up.
(8) Heading Line Off.
(9)
Gain , Sea, Rain Settings.
Zone 3 - Ownship and Plotting Parameters
263 (1) Ownship Parameters.
(2) Plotting Parameters.
(3)
Trail Parameters.
Zone 4 - VRM, EBL and
Signal Controls
264 (1) Variable Range
Marker .
(2) Electronic Bearing Line.
(3) Gain
Setting .
(4) Sea Setting.
(5) Rain Setting.
Zone 5 - Data and Menus
265 Target Data Information.
(2) Menus for VDU
Facilities , MAPS, TRAIL,
PLOT, NAV and WPt.
(3) System and
Function Warnings.
Zone 6 - Cursor Control and Mode
266 (1) Pushbutton Information Boxes.
(2) Cursor Readout Mode.
(3) MISC icon (only with Ergopod)
70 71 Manta 3 ECDIS
Using state of the art technology, the Manta ECDIS
offers a vast
array of advantages to the
navigator, from immediate situation awareness, to sophisticated alarm signalling and
transfer through interaction with
Vector charts.
As a
leader in Electronic Chart system
development ,
Kelvin Hughes has
included full AIS
readiness in the Manta and follows in the
same trackball and three button operational mode as
the very successful Nucleus range of Radar and Chart systems.
Available un 1700, 2000 and
2300 display sizes, to fit the Kelvin Hughes integrated bridges, the MANTA ECDIS is
ideal both
for a fully integrated system or as a stand-
alone unit.
Features:
. Flat Panel TFT Display . Multiple mounting options . ARPA Target Display . "Multi-fuel" - ENC/
raster /C-map . Ergopod control
option . Radar Interlay Display .
User Mapping -
linked to radar . Display of Chart Updates . Networking . Safety Checking and Warning .
Complete Voyage Recording
including past track . Fully Type Approved to IEC 61174 . Type Approved Autopilot Track Control
72 NIS 2002 MkII AIS
This new generation Automatic Identification System (AIS) from Kelvin Hughes provides the
optimal AIS
solution for use on all
types of ships. The NIS 2002 MkII is fully in compliance
with international
regulation and standards as well as with national and class requirements. The
NIS 2002 MkII Transponder consists of a combined radio transceiver unit, GPS receiver,
controller unit and a separate display (MKD) unit, complete with GPS and VHF antennas.
The NIS 2002 MkII Transponder can easily be interfaced to the required
sensors on the bridge
e.g. Gyro and
GNSS . It as already been tested and interfaced with most external navigation
presentation systems on the
market (Radar, ECS/ECDIS).
The NIS 2002 MkII is prepared for
connection to Long-Range systems like
Inmarsat C. It has a user-friendlyinterface for plotting of other ships on a radar
like display. It can also display information about other vessels sorted by
bearing or range. The display also handles the sending/receiving of messages.
Features : Fully compatible with Kelvin Hughes radar and ECDIS Plug and play Smallest transponder unit available Broadcast of
Dynamic , Static and Voyage Related Information Standardised interface for connection to ship sensors e.g. GNSS, Gyro, Turn
indicator ECDIS,
ECS, Radar High resolution 6"
graphic day and
night display Future upgrade possible without hardware
changes Internal 12 channel backup GPS
Easy to install and meets IMO installation recommendations Easy to operate with user-
friendly control interface.
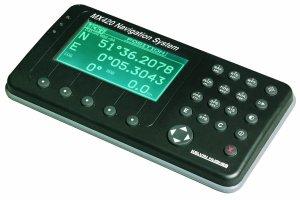
73 MX420 series GPS/DGPS navigator
Features:
. Smartlink(r) Interface
providing Route-plan transfer to Nucleus radar . Panorama display . Tide display screen . Intuitive operation . Sunlight readable display . 'Traffic light' signal
status display . Remote Route
planning display option . Quick, easy installation GPS/DGPS . Time-
saving short cut keys . Splashproof enclosure . Sun almanac/moon phase screens . Flush mount display option . Combined GPS/ beacon aerial . NMEA amplifier (option) providing up to 10 outputs . Can operate from 110/
220V AC and 24V DC
74 SEM200 track Keeping Autopilot
The Kelvin Hughes SEM200 is a fully adaptive autopilot. The operator can
select light, medium
or loaded loading
conditions , and
economy , medium or precise steering performance. Adaptive
rudder limitation can be overridden manually and the
amount increased or decreased with the
joystick.
Features:
Fully type approved Track Control with Kelvin Hughes ECDIS Low
cost adaptive autopilot Preset from factory,
simple sea
trial setup Easy installation: 2
units , 1 factory supplied cable Easy service Gyro interface: NMEA (preferred) or 1:1 speed synchro, 115VAC, 400Hz Speed log interface: 200ppm or NMEA Heading changes with controlled radius of turn Heading set
device is either a joystick or a turning knob Meets IMO's recommendations, tested to IEC 945, Wheelmarked Advanced navigation computer interface available Controls
single or multiple rudders,propellers or waterjets Bumpless Transfer and self-synchronising Heading Easy to SET UP, adapts to ship's speed
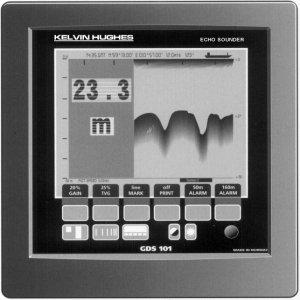
75 Navigation Echo Sounder GDS 101 GDS 101 is equipped with a rotating, digital encoder. This is used with the
Soft Keys to
enable the user to enter new settings during operation. The operator can activate and operate Soft Keys in 10
different Soft Key screens. Storage of recorded data depth. With GPS connected: Time,
Date , Position,Course and Speed. Kelvin Hughes GDS 101
sets a new standard for navigation for all vessels required to have a
navigation echo sounder onboard. It is based on the latest computer techniques offering all features demanded on-
board a
modern ship. GDS 101 is designed to be easy to use and has
incorporated more features than most echo
sounders on the market. It has a rugged and
robust mechanical design. GDS 101 is
developed and tested based on
years of experience. GDS 101 is a graphic, digital navigation echo sounder. A backlit LCD with high resolution
dotmatrix screen gives
instant access to all vital information. The screen shows the information
in graphic and/or numeric presentation. The user can select between six different screen
languages (
English ,
French , German,
Spanish , Russian or
Norwegian ).
76 Ocean Magnetic Compass Systems
For many years, Kelvin Hughes has designed and manufactured some of the
finest magnetic
compasses in the world. Our reputation is based on the
highest standards of
precision engineering and a professional seaman's
knowledge of navigation.
Ocean Steering Compass
Bowl The Ocean compass bowl is the most advanced product of its
type. This is a master compass designed and built to give accurate and long-lasting service under
the most
extreme conditions. Kelvin Hughes azimuth
devices can be used on this compass and
are supplied as part of the standard package.
Features:
175mm card in a 235mm bowl Liquid
filled Ring type magnet in float Compass card printed for top and
reflected reading from below Compass pre-drilled to accept most common Sondes Long-lasting internal
paint finish The Ocean is manufactured to all requirements of the ISO 449, ISO 2269, ISO 613, ISO
10316, IMO 382 (X), and type approved to the European marine equipment directive and other
maritime authorities.
77 NDR2002 Voyage Data Recorder
The Kelvin Hughes NDR-2002 is a type approved Voyage Data Recorder which exceeds the
requirements of IMO Performance Standard A.861(20) for Shipborne Voyage Data Recorders
(VDR). The complete system including the Crash Survival
Module (CSM), Data Acquisition
Unit (DAU) and Interfaces are designed and manufactured by Kelvin Hughes and its
parent company Smiths.
The VDR collects data from the sensors on board the
vessel , it digitises, compresses and stores
this information in an externally
mounted Crash Survivable Module (CSM). The CSM is a
tamper -proof unit designed to withstand the extreme shock, impact, pressure and
heat , which
could be associated with a maritime incident. The CSM may be
retrieved from the vessel and the
stored data replayed by the authorities for investigative purposes.
Features: . Compact and lightweight Crash Survivable Module (CSM) . Single compact and lightweight Data Acquisition Unit [DAU)-29kg . Space saving, modular design makes it ideal for all
classes of vessels including high speed
ferries . Removable Storage Unit (White Box) allows the ship's history to be archived ashore (option)
allows 30
days continuous recording. .Office PC Playback Software for training and monitoring purposes [option) ** . Playback of data allows VCR style viewing of sensor information, including sound and ship's
movements, on an electronic chart background [option) . Remote LCD
Real Time Display (RTD) providing conning information . Integral and optional Remote Status and Alarm Module (SAM) . '
Black Box' CSM data for the last 12
hours using solidstate
memory and an acoustic beacon
to aid underwater location (38
hour option is available) . Integral UPS for 2 hours for all data items . USB port for on-board downloads to
laptop or ship's PC [option) . AC and 24V DC Operation [option)
78


















































































































Kõik kommentaarid