Väikelaevajuhid:
navigatsioon
www.tkj.ee
Maa on ebakorrapärane geomeetriline keha, mida
nimetatakse geoidiks.
Geoid - keha, mille pind on alati risti raskus-kiirenduse
vektoriga ning teoreetiliselt ühtib ookeanide veepinnaga.
Kõige paremini vastab geoidile lapikellipsoid, mida
nimetatakse maaellipsoidiks e. sferoidiks. Suurem
pooltelg a = 6378,245 km; väiksem pooltelg b=
6356 ,863
km, seega vahe on 21,387 km, mis moodustab ainult 0,3
% pikemast.
Navigatsioonis loetaksegi Maad
ellipsoidiks, mille maht
võrdub sferoidi mahuga, s.o R=6371109.7 m või
R=6371,1 km.
Telge, mille ümber toimub maakera ööpäevane
pöörlemine, nimetatakse
maakera teljeks. Punkte, kus
telg lõikub maakera pinnaga, nimetatakse
geograafilisteks poolusteks: Pn - põhja- ehk nordipoolus,
Ps - lõuna- ehk süüdipoolus.
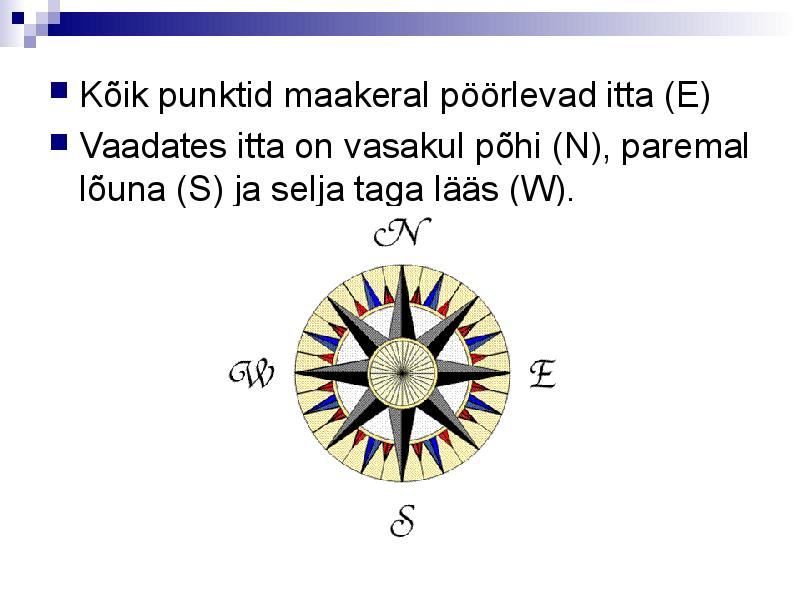
Kõik punktid maakeral
pöörlevad itta (E)
Vaadates itta on vasakul põhi (N), paremal
lõuna (S) ja selja taga lääs (W).
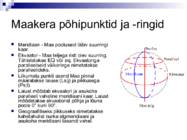
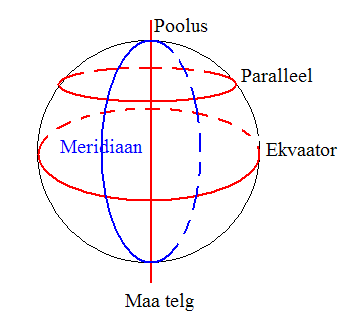
Maakera põhipunktid ja -
ringid
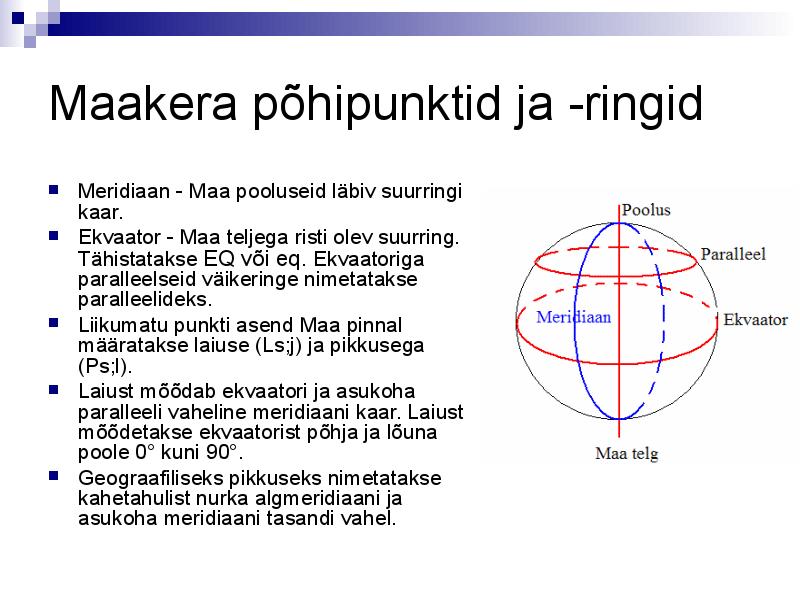
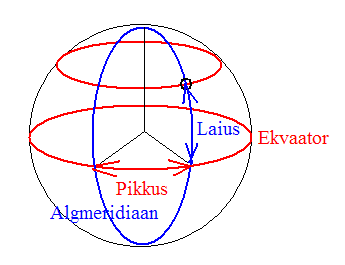
Meridiaan - Maa pooluseid läbiv suurringi
kaar.
Ekvaator - Maa
teljega risti olev suurring.
Tähistatakse EQ või eq. Ekvaatoriga
paral eelseid väikeringe nimetatakse
paral eelideks.
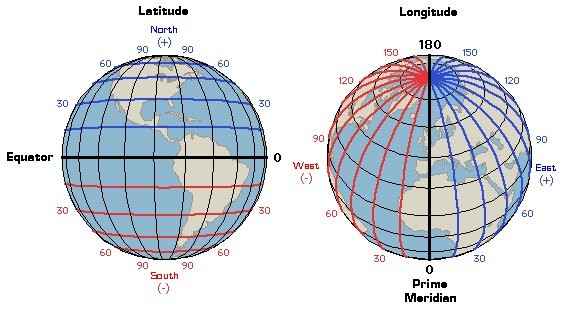
Li kumatu punkti asend Maa pinnal
määratakse
laiuse (Ls;j) ja pikkusega
(Ps;l).
Laiust mõõdab
ekvaatori ja asukoha
paral eeli vaheline
meridiaani kaar. Laiust
mõõdetakse ekvaatorist põhja ja lõuna
poole 0° kuni 90°.
Geograafiliseks
pikkuseks nimetatakse
kahetahulist nurka algmeridiaani ja
asukoha meridiaani tasandi vahel.
Poolused - maakera telje punktid selle pinnal ja
neid nim lõuna- ning põhjapooluseks
Suurringideks nim ringjooni, mille
tasapind läbib maakera
keskpunkti : ekvaator, meridiaanid
ja ortodroom
Väikeringi moodustatava tasapinna
kese ei läbi
maakera keskpunkti: paralleelid, loksodroom
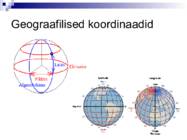
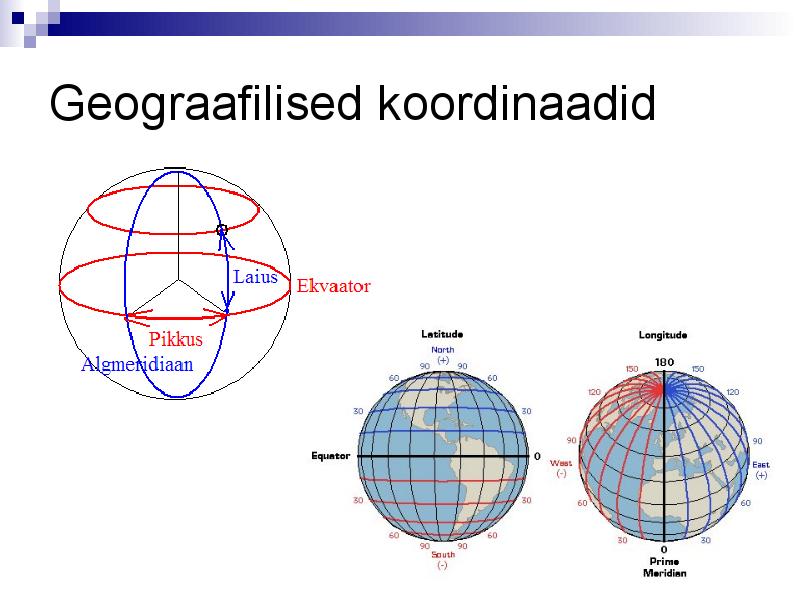
Geograafiline pikkus ja laius
Geograafilised koordinaadid, loetakse
kraadides, minutites ja kümnendikminutites
Meie asukoht:
φ=58o32’ N (laius) ja
λ=026o40’ E (pikkus)
Geograafilised koordinaadid
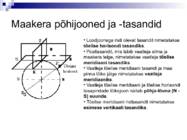
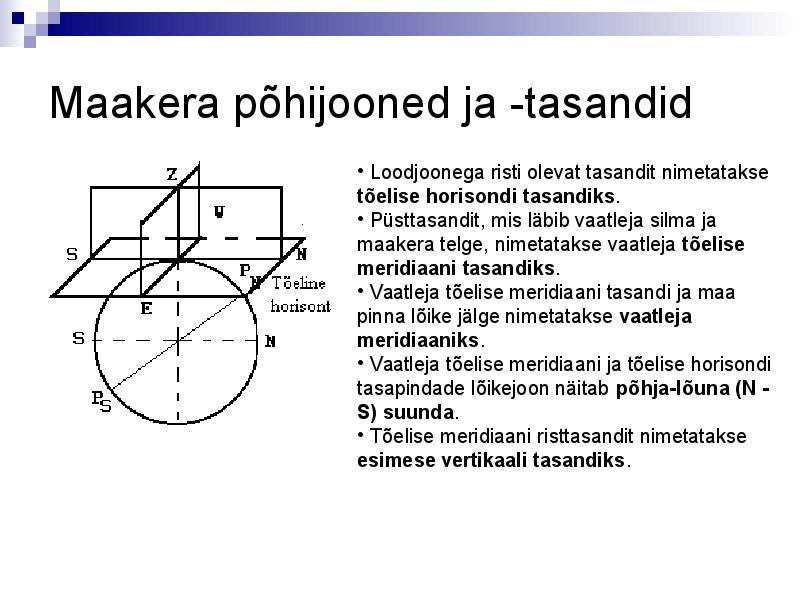
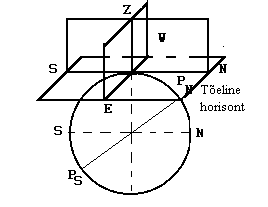
Maakera põhijooned ja -
tasandid • Loodjoonega risti olevat
tasandit nimetatakse
tõelise horisondi tasandiks.
• Püsttasandit, mis läbib vaatleja silma ja
maakera telge, nimetatakse vaatleja
tõelise
meridiaani tasandiks.
• Vaatleja tõelise meridiaani tasandi ja maa
pinna lõike jälge nimetatakse
vaatleja
meridiaaniks.
• Vaatleja tõelise meridiaani ja tõelise horisondi
tasapindade lõikejoon näitab
põhja-lõuna (N -
S) suunda.
• Tõelise meridiaani risttasandit nimetatakse
esimese vertikaali tasandiks.
Horisondi
jagamise süsteemid
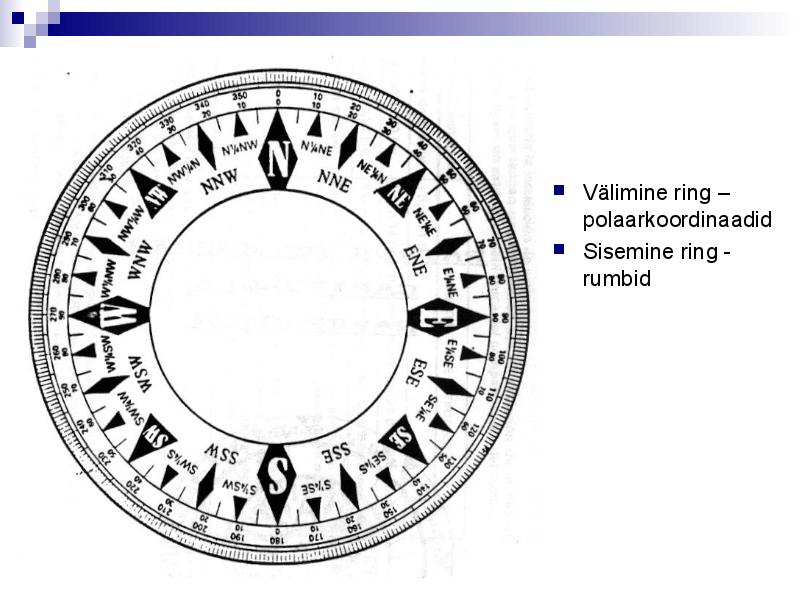
Purjelaevade ajastul jaotati
horisont 32
osaks, mida nimetati rumbideks.
Rumbe põhi (N), lõuna (S), ida (E) ja lääs
(W) nimetati
pearumbideks, rumbe kirre
(NE), kagu (SE), edel (SW) ja loe (NW) -
veerand rumbideks.
Meresõidu arenedes osutus horisondi
jaotus rumbisüsteemis liiga ebatäpseks.
Asendati see
veerandringi süsteemiga,
milles iga horisondi veerand jaotati 90°
kraadiks. Suundi hakati lugema
peasuundadest N ja S paremale ja
vasakule poole näit. 45°NE; 34°SW
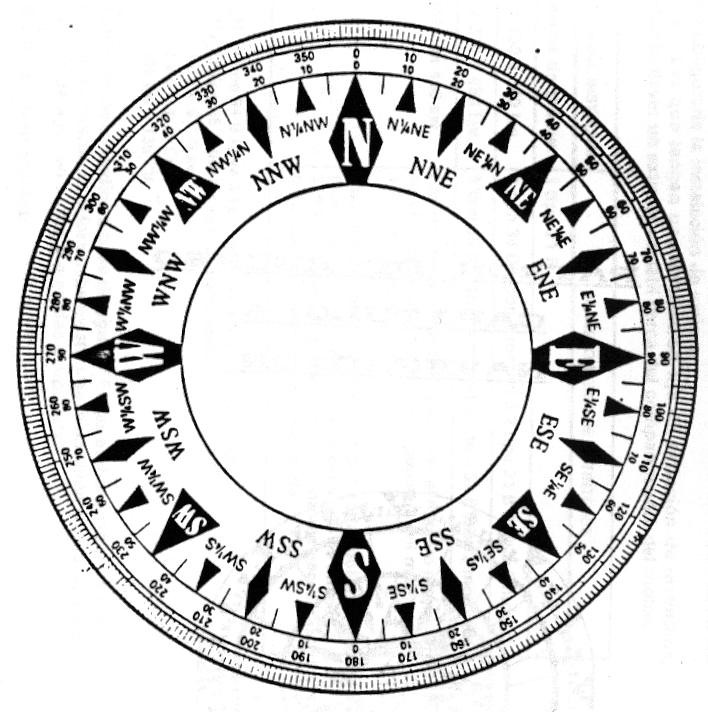
20. sajandi alguses asendati veerandringi
süsteem
ringskaala süsteemiga, milles
horisont jaotatakse põhja
suunast päripäeva 360 kraadiks.
Välimine ring –
polaarkoordinaadid
Sisemine ring -
rumbid Tõeline
kurss , tõeline
peiling ja
kursinurk
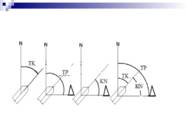
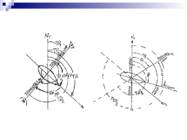
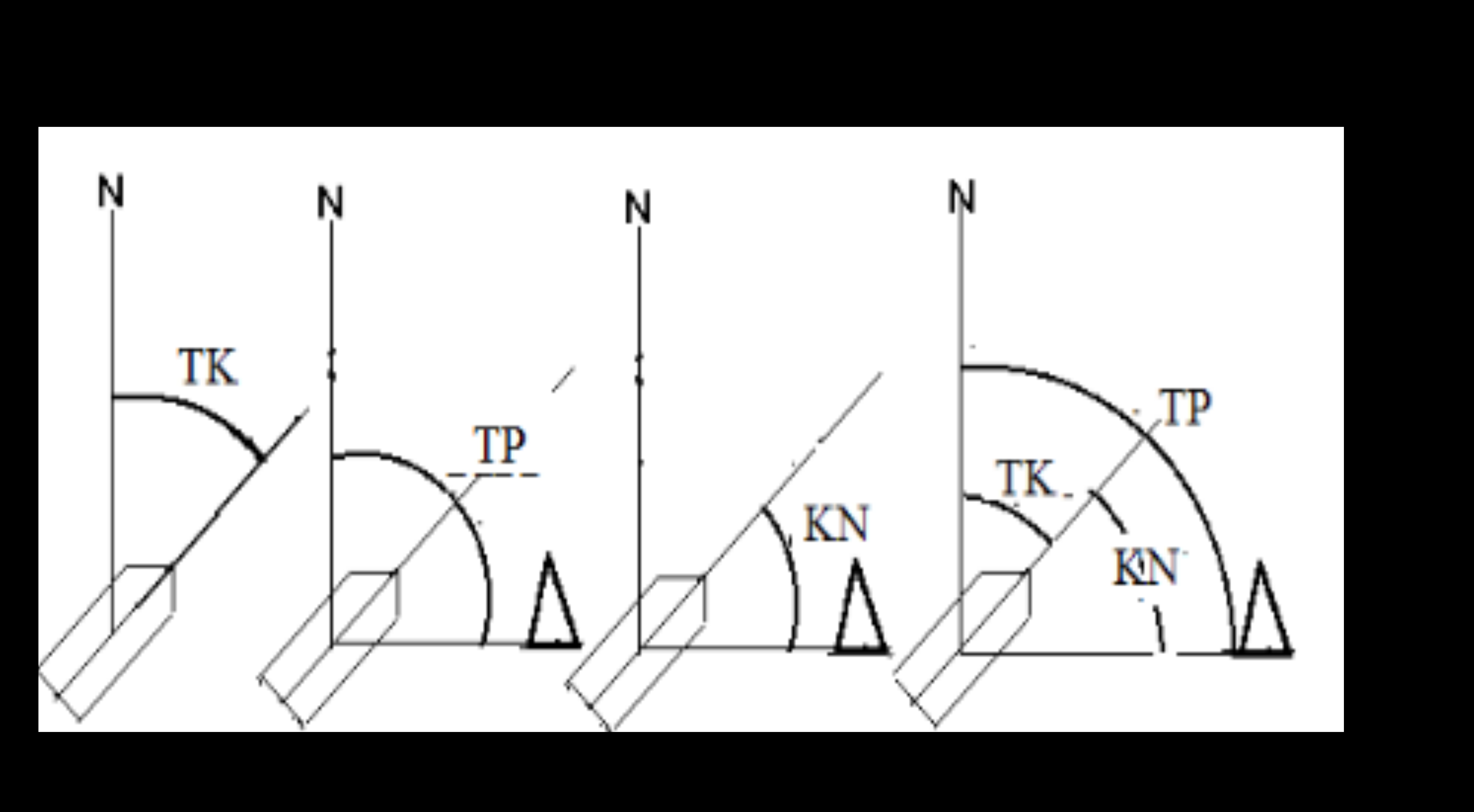
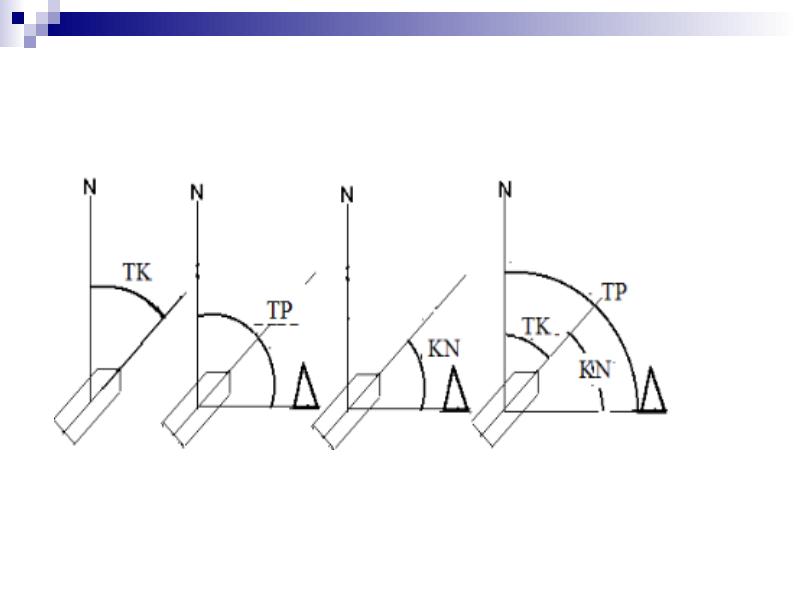
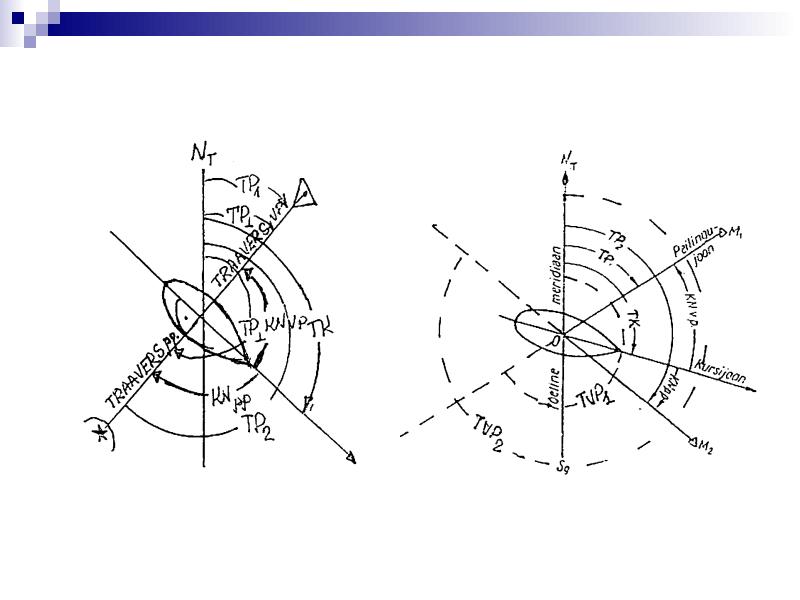
Tõeline kurss (TK) - tõelise meridiaani tasandi
põhjasuuna ja laeva pikitasandi vööripoolse
suuna vaheline kahetahuline nurk, mida
mõõdetakse päripäeva 0° - 360°.
Tõeline peiling (TP) - tõelise meridiaani tasandi
põhjasuuna ning vaatleja silma ja objekti läbiva
püsttasandi vaheline kahetahuline nurk, mida
mõõdetakse 0° - 360°.
Kursinurk (KN) - laeva vööripoolse pikitasandi ning
vaatleja silma ja objekti läbiva püsttasandi
vaheline kahetahuline nurk. Rannanavigatsioonis
mõõdetakse kursinurka laeva pikitasandi
vööripoolsest osast paremale ja vasakule 0°-180°.
Seejuures lisatakse kursinurga arvväärtusele
nimetus parempoord (pp) vôi vasakpoord (vp).
Tõeline kurss, tõeline peiling ja kursinurk
seostuvad:
TP = TK + KN (pp)
TP = TK - KN (vp)
Tõeline vastaspeiling,
traavers
TRAAVERSIKS nimetatakse laeva diametraaltasapinnale ristset suunda, st
eseme kursinurk KN =90° kas vasakus või paremas poordis. Paremas
poordis +90°. vasakus poordis -90° .
Traaversi kaugus on lühim kaugus, millega möödutakse antud kursil
majakast, tuletornist või esemest, märgime
Tõeliseks vastaspeilinguks (TVP) on päripäeva loetud nurk tõelise
meridiaani Npoolse osa ja esemelt laeva kompassi suuna vahel või
tõelisest peilingust 180
° võrra erinev suuras.
TVP = TP ± 180° või TP = TVP ± 180°
Maa
magnetism Maad ümbritseb
magnetväli , mille olemasolu
saab tõestada magnetnõela abil.
Vabalt ülesriputatud magnetnõela keskjoont
läbiva püsttasandi ja tõelise horisondi lõikejoont
nimetatakse
magnetmeridiaaniks.
Magnetmeridiaani suund ei ühti tõelise
meridiaani suunaga, sest
Maa magnetpoolused
ei lange kokku geograafiliste poolustega.
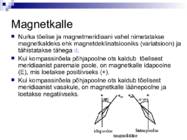
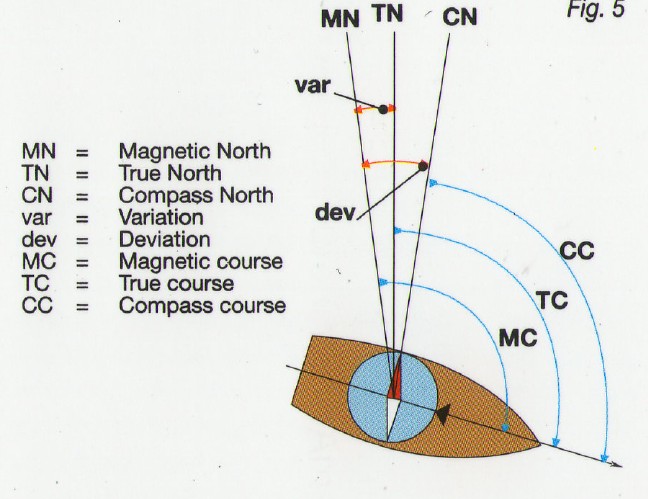
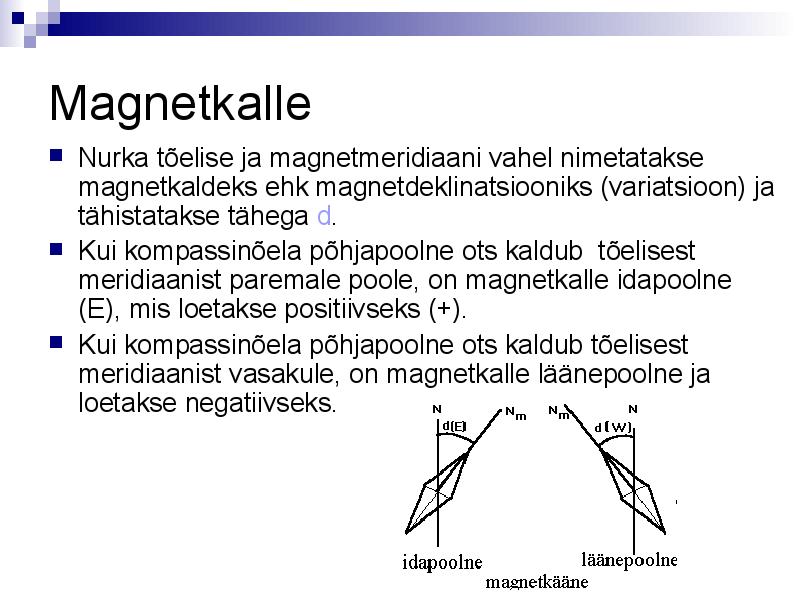
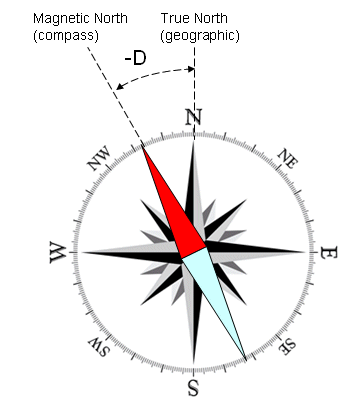
Magnetkalle
Nurka tõelise ja magnetmeridiaani vahel nimetatakse
magnetkaldeks ehk magnetdeklinatsiooniks (
variatsioon ) ja
tähistatakse tähega d.
Kui kompassinõela põhjapoolne ots
kaldub tõelisest
meridiaanist paremale poole, on magnetkal e idapoolne
(E), mis loetakse positi vseks (+).
Kui kompassinõela põhjapoolne ots kaldub tõelisest
meridiaanist vasakule, on magnetkal e läänepoolne ja
loetakse negati vseks.
Magnetkalle muutub perioodiliselt. Et meresõitja saaks
määrata magnetkalde väärtuse alati mistahes ajal, on
merekaartidel
näidatud magnetkalde väärtus, määramise
aasta ja aastane muutus.
Magnetkalde väärtuse arvutamisel kindlaks aastaks tuleb
määrata õiend, mis saadakse aastate vahe korrutamisel
magnetkalde muutumise kiirusega.
Näide: kaardil on näidatud magnetkalle väärtus 1975 aastal
4°,8 W. Aastane vähenemine 0°,04.
Määrata magnetkalde väärtus aastal 1993.
Dd = - 0°,04* (1993 - 1975) = - 0°,72 - 0°,7
d1993 = 4°,8 - 0°,7 = 4°,1
Magnetkalde väärtus arvutatakse täpsusega 0°,1.
Variatsiooni tähistamine ja leidmine
merekaartidelt
Maamagnetismi elemendid ei ole püsivad, vaid
muutuvad perioodiliselt, üldpildi maakeral saame
spetsiaalmagnetkaartidelt. Variatsiooni samajooni
nimetatakse
isogoonideks; 0-isogooni -
agooniks;
inklinatsiooni samajooni -
isokliinideks; sügavuse
samajooni -
isobaatideks. Kõikidel merekaartidelon
variatsioon trükitud koos tema aastase muutusega ja
tema määramise aasta.
Variatsiooni aastane muutus võib mõnes pi rkonnas ol a
kuni 0,3°, trükitakse kaardil täpsusega kuni 0,01 °. vahel
ka 1'. Variatsioon ise aga 0,1° täpsusega
kursside arvestuseks .
Variatsioon ehk deklinatsioon on merekaartidel trükitud:
1. Tühjadel veealadel kaarekodariku
keskele täpsusega
kuni 0,1° ja märgi või nimega.
2. Kohtades, kus pole ruumi ainult
arvudega oma märgi ja
nimetusega.
3. Suure mastaabiga kaartidel ja plaanidel, kus terve kaardi
ulatuses on ühesugune - kaardi ti tlis koos aastase
muutusega, määramisaastaga, märgi ja nimetusega.
4. Väikese mastaabiga kaartidel ja magnetkaartidel ja
keeruka muutusega pi rkondades isogoonidena koos
aastase muutusega, märgi ja nimetusega.
5. Aladel, kus variatsioon järsult erineb ümbritseva
pi rkonna omast ni väärtuse kui märgi poolest,
nimetatakse magnetiliseks anomaaliaks, pi rid
tähistatakse, variatsiooni võimalikud kõikumised
anomaalia pi rkonnas trükitakse arvudena koos märgi ja
nimega.
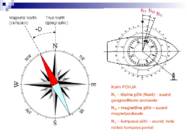
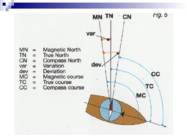
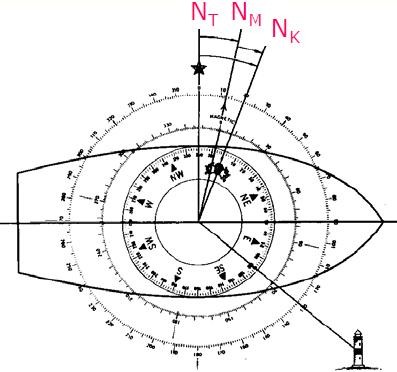
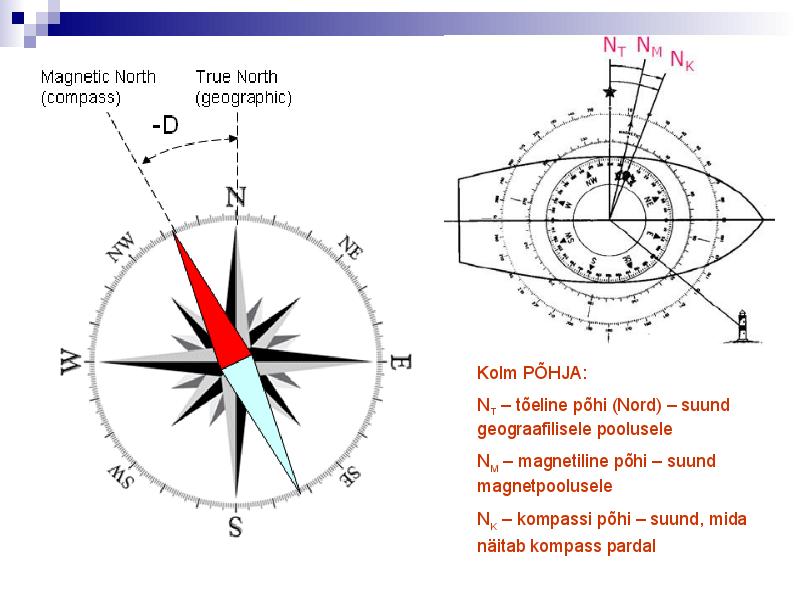
Kolm PÕHJA:
N – tõeline põhi (Nord) – suund
T
geograafilisele poolusele
N – magnetiline põhi – suund
M
magnetpoolusele
N – kompassi põhi – suund, mida
K
näitab kompass
pardal Magnetkurss, magnetpeiling
Magnetkursiks nimetatakse nurka magnetmeridiaani
põhjasuuna ja laeva pikitasandi vööripoolse suuna vahel.
Magnetpeilinguks nimetatakse nurka magnetmeridiaani
ja vaatleja silma ning mingit objekti läbiva püsttasandi
vahel.
Kui mingisugune suund merel on määratud
magnetmeridiaani suhtes, on kerge leida ka tõeline
suund järgmiste valemite abil:
TK = MK + d
TP = MP + d
Magnetkompass
Magnetkompassi kasutatakse merel laevadel kursinäitajatena ja laeva asukoha
määramiseks .
Magnetkompassi tööpõhimõte seisneb vabalt pöörleval magnetnaelal mis
toetub vertikaalselt asetsevale teljele.
Magnetkompassid võib jagada:
1.
laeva-,
2.
kaatri-,
3.
paadikompassideks.
Magnetkompassi põhiosad on:
magnetkompassikatel koos
kompassikodarikuga (see on tundlik element
kompassis);
•
kompassijalg koos
deviatsiooni kompenseerimisseadmega (neutraliseerimaks
laeva enda metallist tulenevat magnetismi, on jala sisse asetatud 2 gruppi magneteid.
Kompassijalg asetatakse alusel täpselt diametraaltasapinnale).
•
peilingaator, et määrata kursinurk ja peiling.
Kurss võetakse kaarekodarikult vööri kursijoonelt.
Peiling võetakse kaarekodarikult peilingaatori abil prismast läbi.
Kursinurk võetakse
asimutaadiringilt peilingaatori abil.
Kompassi asimutaadiringil asuv tehase nr. peab “vaatama” ahtri poole.
Magnetkompassi
deviatsioon Laevas asuvale magnetkompassi mõjutab lisaks
maamagnetismile ka laeva oma magnetväli. Sel e
magnetvälja mõjul kaldub magnetkompassi nõel kõrvale
magnetmeridiaani suunast. Laevaraua magnetiseerumist
nimetatakse
magnetiliseks induktsiooniks.
Kompassinõela telge läbiva püsttasandi lõikejoont tõelise
horisondi tasandiga nimetatakse
kompassimeridiaaniks.
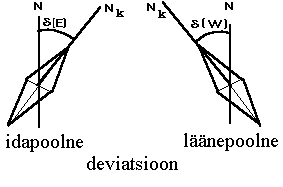
Nurka magnetmeridiaani ja kompassimeridiaani vahel
nimetatakse
magnethälbeks ehk deviatsiooniks, mida
tähistatakse kreeka tähega .
Vastavalt eeskirjadele kompassi deviatsioon meresõidul
ei või ületada ±5 kraadi. Sel epärast see hävitatakse või
kompenseeritakse.
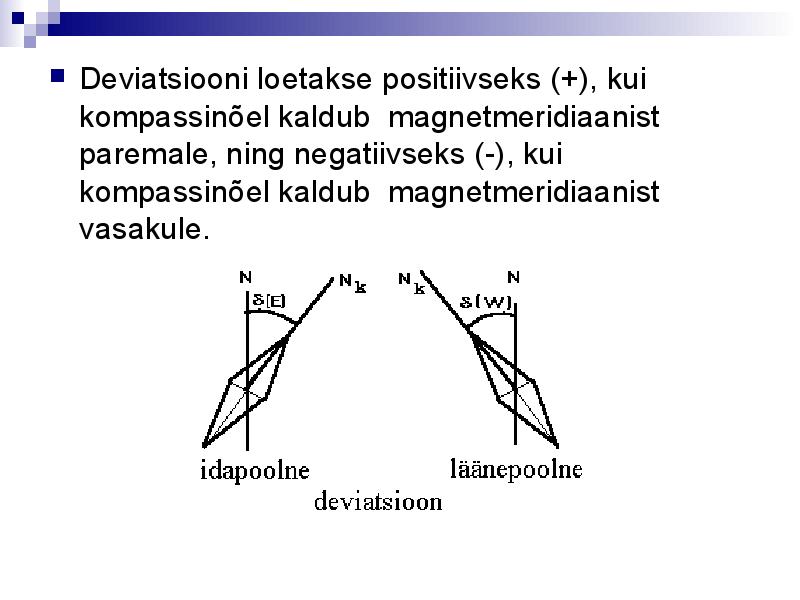
Deviatsiooni loetakse positi vseks (+), kui
kompassinõel kaldub magnetmeridiaanist
paremale, ning negati vseks (-), kui
kompassinõel kaldub magnetmeridiaanist
vasakule.
Nurka kompassimeridiaani põhjapoolse suuna ja
laeva pikitasandi vööripoolse suuna vahel
nimetatakse
kompassikursiks.
Nurka kompassimeridiaani ja vaatleja silma ning
mingit objekti läbiva püsttasandi vahel
nimetatakse
kompassipeilinguks.
Magnet- ja kompassisuundade vahel valitsevad
seosed:
MK = KK +
MP = KP +
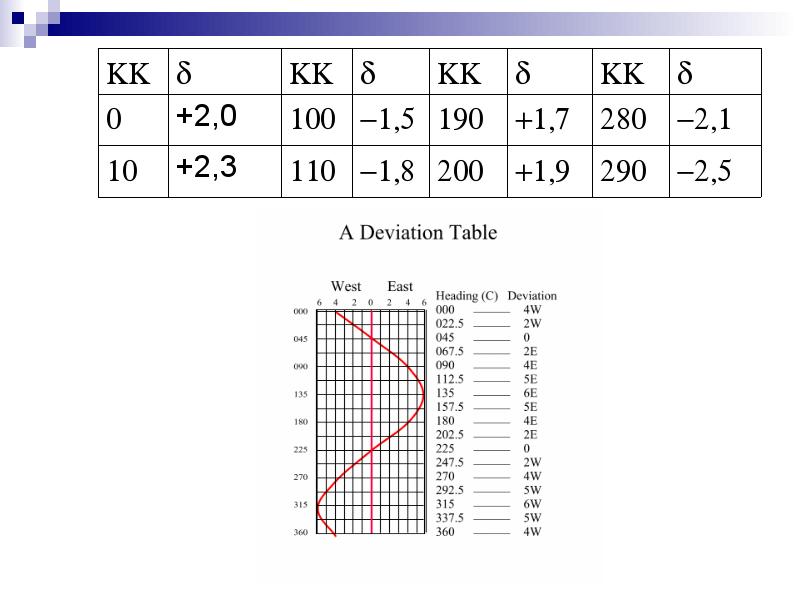
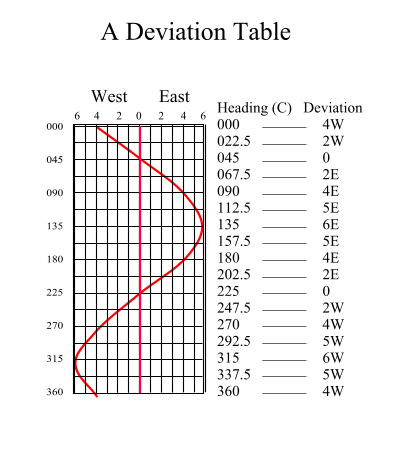
Deviatsiooni väärtus määratakse
deviatsioonitabelite abil.
+2,0
+2,3
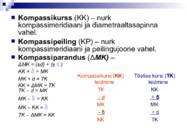
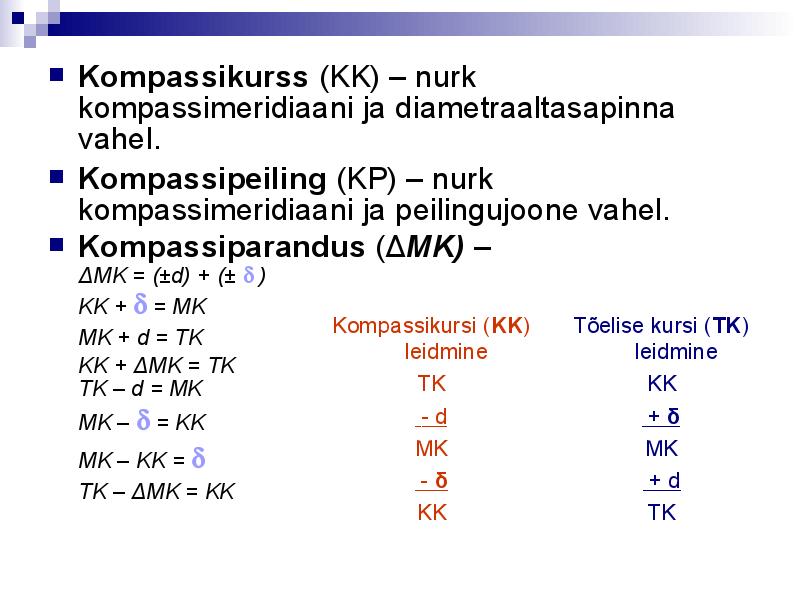
Kompassikurss (KK) – nurk
kompassimeridiaani ja diametraaltasapinna
vahel.
Kompassipeiling (KP) – nurk
kompassimeridiaani ja peilingujoone vahel.
Kompassiparandus (Δ
MK) –
ΔMK = (±d) + (±
)
KK +
= MKKompassikursi (
KK)
Tõelise kursi (
TK)
MK + d = TKleidmine
leidmine
KK + ΔMK = TK TK – d = MKTK
KK
MK –
= KK - d
+
δMK – KK =
MK
MK
TK – ΔMK = KK -
δ + d
KK
TK
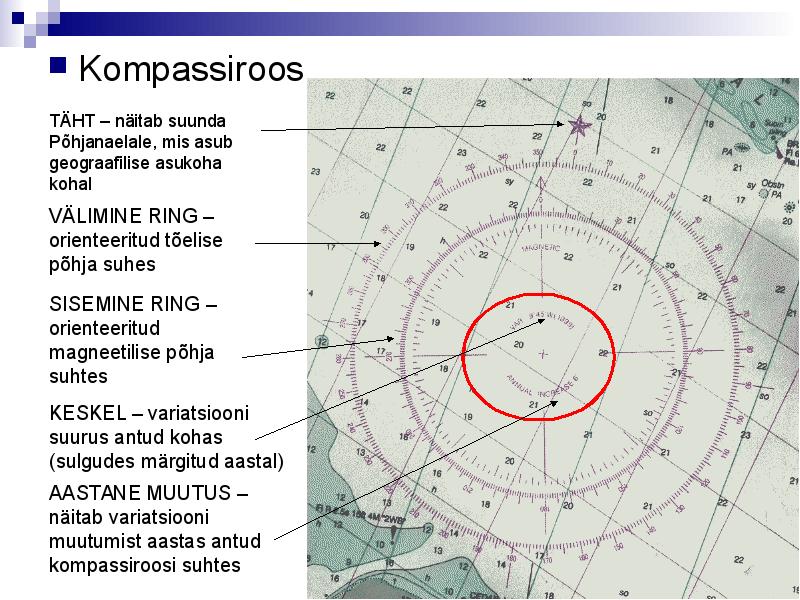
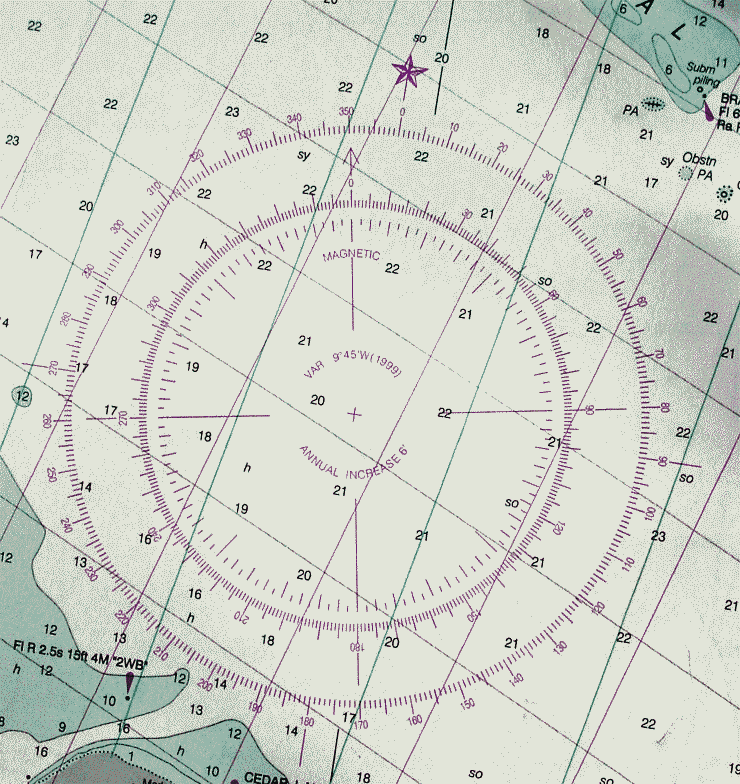
Kompassiroos
TÄHT – näitab suunda
Põhjanaelale, mis asub
geograafilise asukoha
kohal
VÄLIMINE RING –
orienteeritud tõelise
põhja suhes
SISEMINE RING –
orienteeritud
magneetilise põhja
suhtes
KESKEL – variatsiooni
suurus antud kohas
(sulgudes märgitud aastal)
AASTANE MUUTUS –
näitab variatsiooni
muutumist aastas antud
kompassiroosi suhtes
Kiiruse ja kauguse
ühikud merel,
läbitud tee määramine, logid
Pikkusühikuna kasutatakse merel
meremiili –
üks meremi l võrdub Maa meridiaani ühe
kaareminuti (laiuseminuti) pikkusega.
Tähistatakse 1 M; 1 nm; 1´
Meresõidu kiirusühik on
sõlm, mis tähendab
kiirust 1
meremiil tunnis.
Laeva poolt läbitud tee ja laeva kiiruse
mõõtmiseks kasutatavaid riistu nimetatakse
logideks.
Mainitud logid mõõdavad laeva kiirust vee
suhtes.
Meresõidus on kasutusel olnud mitmesuguseid
logisid:
- käsilogi
-
mehaaniline logi - hüdrodünaamiline logi
- induktsioonlogi
- Dopplerlogi
Kiirusühik on pärit aluse kiirusemõõtmise vi sist ujukiga,
halg (inglise keeles
log), tünn vms, mil e külge kinnitati
logili n sõlmedega. Ujuk visati vette ja loeti li nile iga 47
jala ning 3 tol i tagant tehtud sõlmi, mida logi tekilt
sikutas 28 sekundi jooksul.
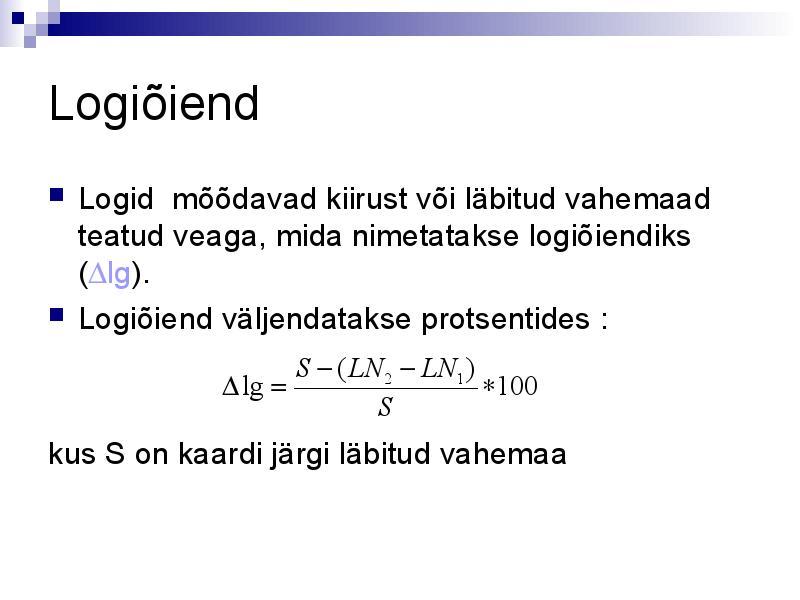
Logiõiend
Logid mõõdavad kiirust või läbitud
vahemaad teatud veaga, mida nimetatakse logiõiendiks
(lg).
Logiõiend väljendatakse protsentides :
S (
LN
LN )
lg
2
1
100
Skus S on kaardi järgi läbitud
vahemaa Logitegur
Logiõiendi asemel võib kasutada logitegurit Klg:
lg
K 1
lg
100
Logiõiend määratakse mõõtmiilil
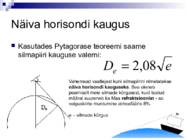
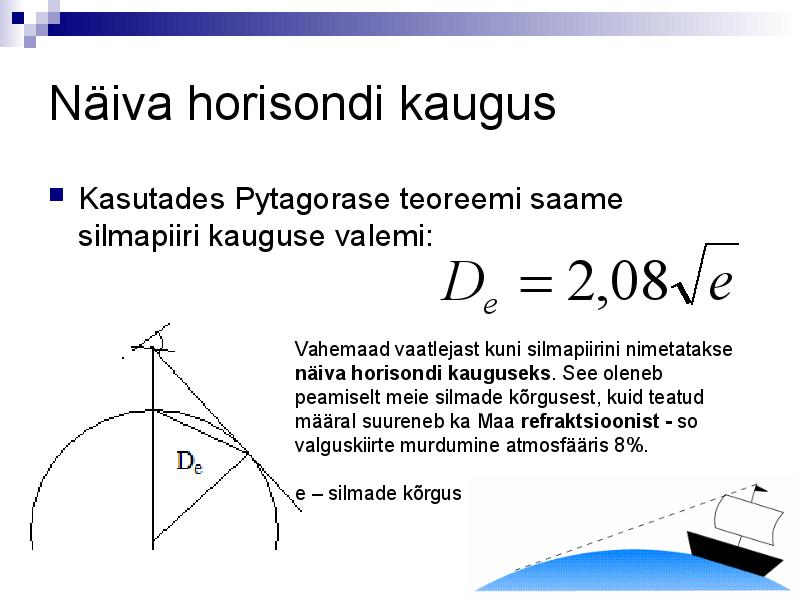
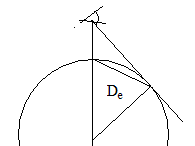
Näiva horisondi kaugus
Kasutades Pytagorase teoreemi saame
silmapiiri kauguse valemi:
D 0,
2 8
eeVahemaad vaatlejast kuni silmapiirini nimetatakse
näiva horisondi kauguseks. See oleneb
peamiselt meie silmade kõrgusest, kuid teatud
määral suureneb ka Maa
refraktsioonist - so
valguskiirte
murdumine atmosfääris 8%.
e – silmade kõrgus meetrites
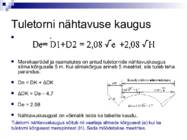
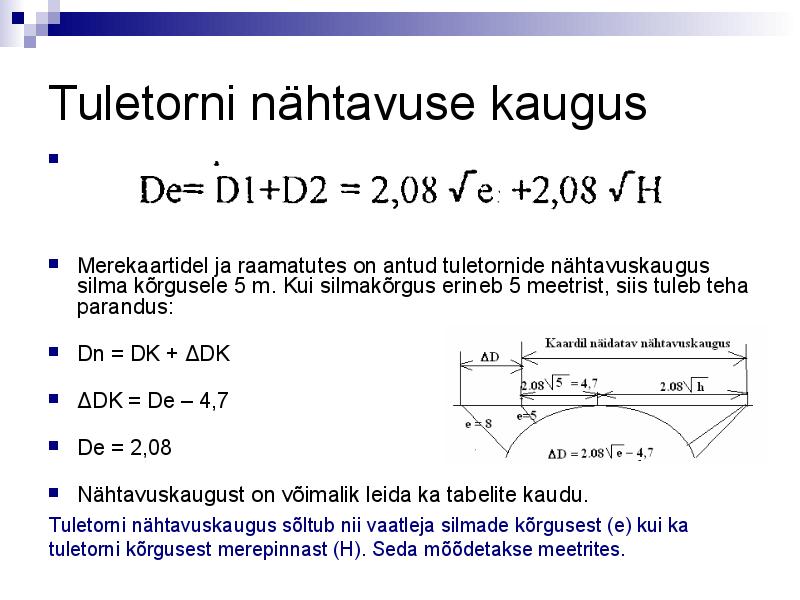
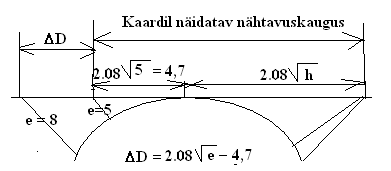
Tuletorni nähtavuse kaugus
Merekaartidel ja raamatutes on antud tuletornide nähtavuskaugus
silma kõrgusele 5 m. Kui silmakõrgus erineb 5 meetrist, siis tuleb teha
parandus:
Dn = DK + ΔDK
ΔDK = De – 4,7
De = 2,08
Nähtavuskaugust on võimalik leida ka
tabelite kaudu.
Tuletorni nähtavuskaugus sõltub nii vaatleja silmade kõrgusest (e) kui ka
tuletorni kõrgusest merepinnast (H). Seda mõõdetakse meetrites.
MEREKAARDID
Kaardiks nimetatakse Maa pinna või selle mõne
osa matemaatiliselt
tuletatud , vähendatud ja
üldistatud tasapinnalist kujutist.
Sferoidi ei ole võimalik tasapinnal kujutada
moonutusteta. Moonutused
alluvad teatud
seaduspärasustele. See asjaolu võimaldab
koostada mingi kindla otstarbelise kaardi kõige
lihtsamal moel
Mõõtkava
Iga kaart kujutab maakera pinda või selle
osa vähendatult.
Vähendamisega seostub kaardimõõdu e.
mõõtkava mõiste.
Eristatakse arv- ja joonkaardimõõtu.
Mastaap Arvmastaap näitab, mitu pikkusühikut maa-
alal vastab ühele ühikule kaardil. Mida suurem
on nimetaja, seda väiksem on mastaap.
• Joonmastaap näitab
mitmele pikkusühikule
looduses vastab üks pikkusühik kaardil.
• Mastaabi ülim täpsus on väikseim kaugus, mida
võib kaardil mõõta.
Inimese silm eristab 0,2 mm (
pliiatsi punkt)
0,02cm (=0,2mm) x 200000 = 4000cm (40m)
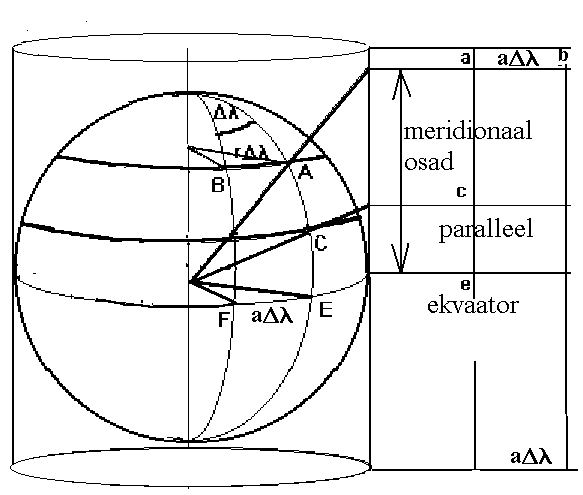
Kartograafilised projektsioonid
Kaardi
koostamiseks projekteeritakse
meridiaanid, paralleelid ja Maa pinna
punktid kas silindrile, koonusele või
tasandile .
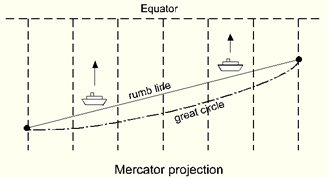
Merekaartidele esitatavad nõuded
Laeva kursijoon (loksodroom) peab olema
kaardil sirge.
Meridiaanid peavad olema
sirged ja omavahel
rööpsed ning paralleelid samuti sirged -
meridiaanidega risti.
Nurgad kartograafilisel projektsioonil peavad
võrduma
nurkadega looduses.
Nendele nõuetele vastab
Merkaatori projektsioon .
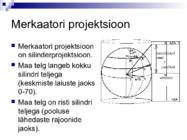
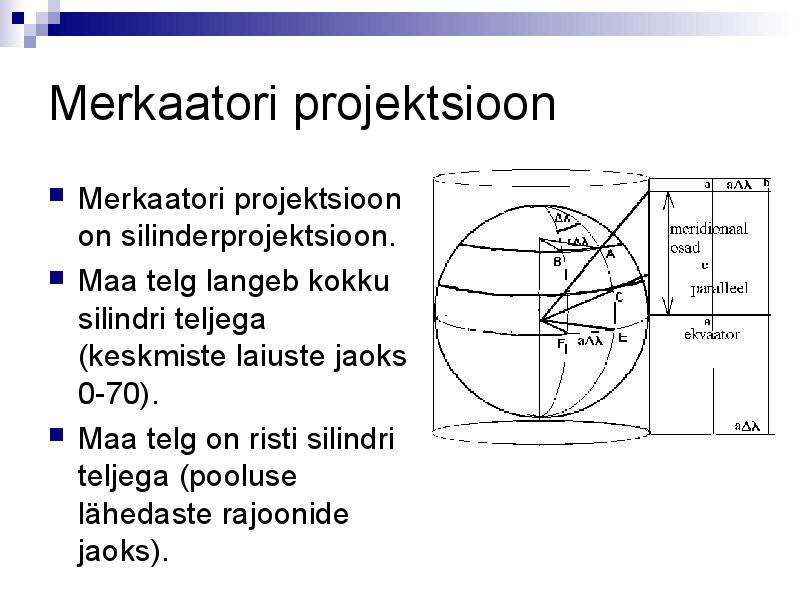
Merkaatori projektsioon
Merkaatori projektsioon
on silinderprojektsioon.
Maa telg langeb kokku
silindri teljega
(keskmiste laiuste jaoks
0-70).
Maa telg on risti silindri
teljega (
pooluse lähedaste rajoonide
jaoks).
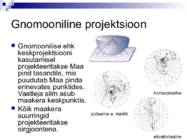
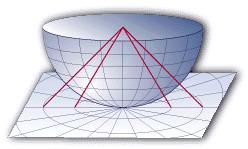
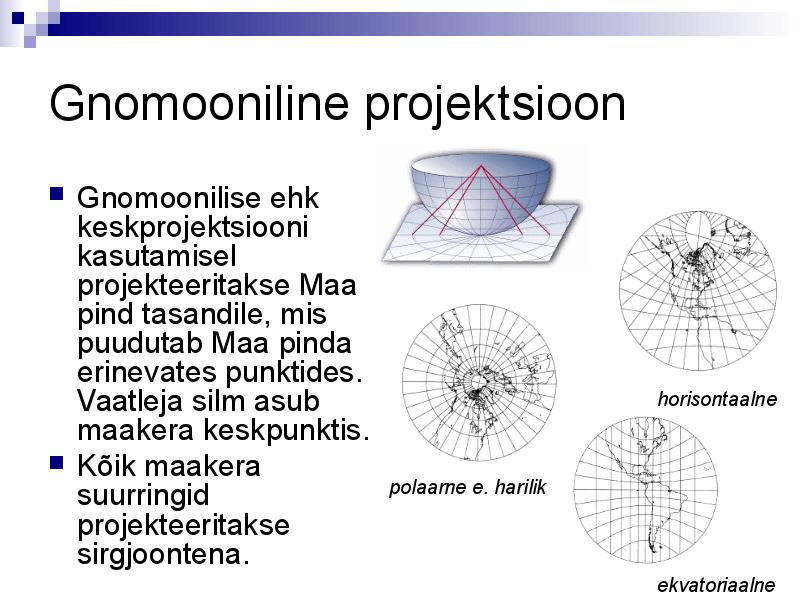
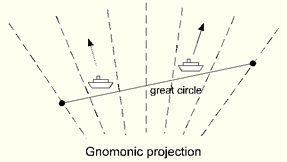
Gnomooniline projektsioon
Gnomoonilise ehk
keskprojektsiooni
kasutamisel projekteeritakse Maa
pind tasandile, mis
puudutab Maa pinda
erinevates punktides.
Vaatleja silm asub
horisontaalnemaakera
keskpunktis .
Kõik maakera
suurringid
polaarne e. harilikprojekteeritakse
sirgjoontena.
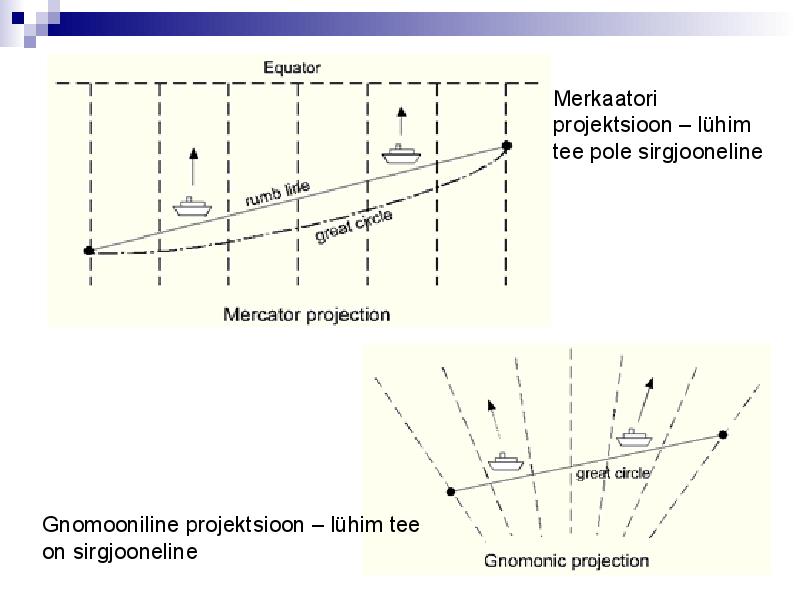
ekvatoriaalneMerkaatori
projektsioon – lühim
tee pole sirgjooneline
Gnomooniline projektsioon – lühim tee
on sirgjooneline
Navigatsioonikaardid
Generaalkaardid – laeva tee eelmärkimine
1:500000 – 1:5000000
Sõidukaardid – sõit avamerel, rannavetes
1:
100000 – 1:500000
Erikaardid – sõit ranna lähedal, kitsustes
1:25000 – 1:75000
Plaanid –
sisenemine sadamatesse,
reididele 1:1000 – 1:25000
Ülevaatekaardid – erinevad andmed ookeanide,
merede kohta 1:500000 .......
Magnetkaardid – Maa magnetvälja kujutamine
1:20000000
Indekskaardid – reisiks
kaartide ja käsi-
raamatute leidmiseks 1:1000000 .......
Atlased – üksikute piirkondade tundmaõppimiseks
Soodsate mereteede, tähistaeva, ajavööndite,
hüdrometeoroloogilised kaardid
Kaarditöö
Meresõitja arvutab laeva li kumise ja määrab
laeva asukoha graafiliselt merekaardil.
Graafiliste ja analüütiliste arvutuste kogumit ning
nende ülesannete täitmist, nimetatakse
kaarditööks.
Laeva
asukohta , mis on saadud sellisel moel, et
laeva poolt läbitud tee kantakse kaardile
joonistatud laeva liikumissuunale - kursile,
nimetatakse
arvutatud ehk laagitud kohaks.
Kaarditööriistad
Paralleeljoonlaud
Transporti r
Sirklid
Pliiats Kustutuskumm
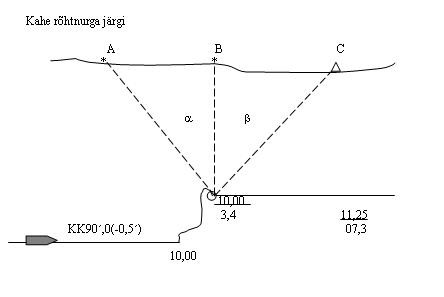
Protraktor (koha määramine rõhtnurkade järgi)
Kaardiraskused
Deviatsiooni määramine ja
hävitamine
Kord aastas või kui ületab ±5°
Kompassi asukoha muutmisel
Peale laeva remonti ja elektrikeevituste
puhul
Peale märgatavat põrutust (
kari , kai vmt)
Magnetlaiuse tunduval muutumisel
Kui laev seisab samal kursil üle kahe kuu
Sügavuste mõõtmine, loodid
Sügavust mõõdetakse loodidega: käsi- ja
kajaloodid
Käsilood koosneb tina või malmkuulist massiga
3,5...5 kg ja selle külge kinnitatud loodli nist,
mille pikkus on 52 m.
Loodliin on jaotatud meetri kaupa. Meetrite
tähistamiseks kasutatakse erinevaid
märgistusviise. Täiskümned tähistatakse
värviliste ri deribadega.
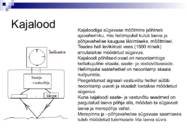
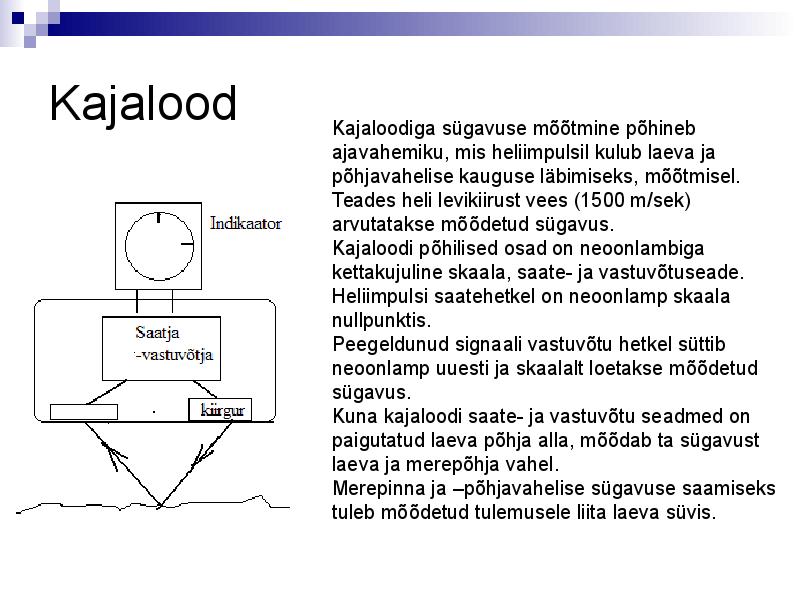
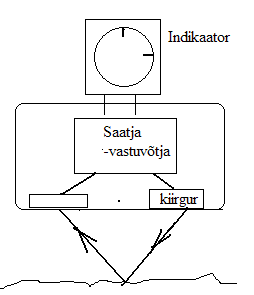
Kajalood Kajaloodiga sügavuse mõõtmine põhineb
ajavahemiku, mis heliimpulsil kulub laeva ja
põhjavahelise kauguse läbimiseks, mõõtmisel.
Teades heli levikiirust vees (1500 m/sek)
arvutatakse mõõdetud sügavus.
Kajaloodi põhilised osad on neoonlambiga
kettakujuline skaala, saate- ja vastuvõtuseade.
Heliimpulsi saatehetkel on neoonlamp skaala
nullpunktis.
Peegeldunud signaali
vastuvõtu hetkel süttib
neoonlamp uuesti ja skaalalt loetakse mõõdetud
sügavus.
Kuna kajaloodi saate- ja vastuvõtu
seadmed on
paigutatud laeva põhja alla, mõõdab ta sügavust
laeva ja merepõhja vahel.
Merepinna ja –põhjavahelise sügavuse saamiseks
tuleb mõõdetud tulemusele liita laeva süvis.
Laeva tee arvutamine
Laakimine Laeva triiv ( α )
Hoovusõiend ( β )
Reisiplaneerimine
Kaarditöö
Laakimine - laeva li kumise elementide
arvestamine tema asukoha määramiseks ja
kaardile kandmiseks (K; V; α; β).
Graafiline ja
analüütiline.
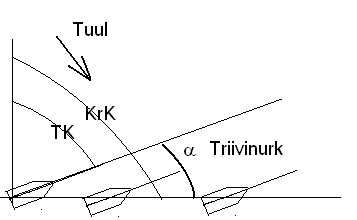
Tri v - laeva kõrvalekaldumine kursist tuule
mõjul. Tri vi suurust iseloomustab triivinurk, so
laeva tõelise kursi ja tegeliku liikumise suuna
vaheline nurk (α). Kui tuul puhub vasakust
pardast, siis on α pluss märgiga, kui aga
paremast pardast, siis mi nus märgiga. Triivivaks
nimetatakse ka laeva, mil el puudub merel käik,
on jääs kinni või mil e ankur ei pea.
Triivi mõjul hakkab laev
kalduma kõrvale
oma tõelisest kursist ja hakkab liikuma nn.
kaardikursi järgi. Kui muudetakse laeva
kurssi, siis muutub ka triivi nurga väärtus.
Praktiliselt on
triivinurka võimalik
kindlaks määrata kas laeva asukoha
kindlaks määramiste abil või ka
ligikaudselt laeva kiiluvee ja laeva
diametraaltasapinna vahelise nurga
mõõtmise abil.
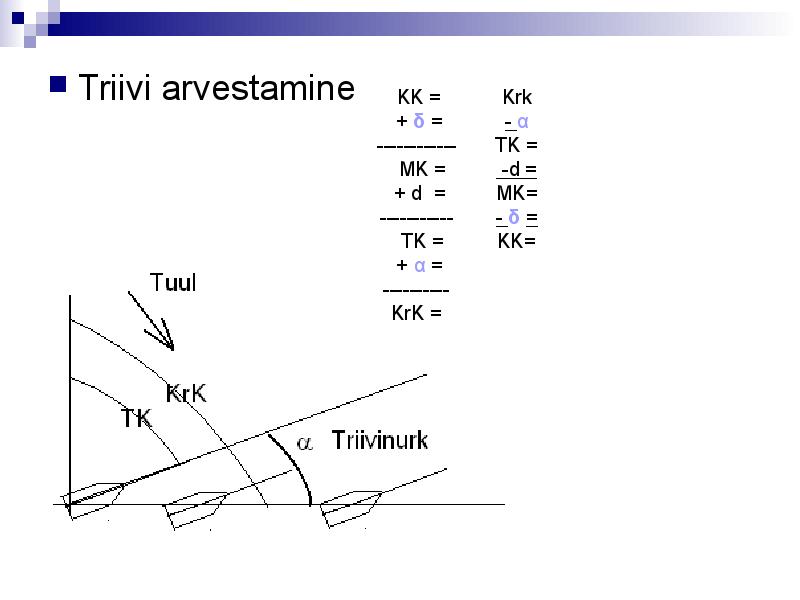
Triivi arvestamine
KK =
Krk
+
δ =
- α
------------
TK =
MK =
-d =
+ d =
MK=
-----------
-
δ =
TK =
KK=
+ α =
----------
KrK =
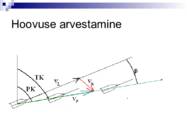
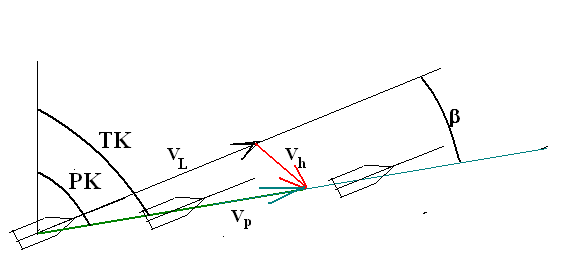
Hoovus - merehoovus on merevee
horisontaalsuunaline kulgli kumine
maailmameres. Hoovust iseloomustavad kiirus,
suund ja toime kestvus. Ki rust mõõdetakse
sõlmedes. Suunda arvestatakse ringsüsteemis
kraadides, sellesse horisondi punkti, kuhu
veemassid liiguvad. Laeva hälbimist tõelisest
kursist veemasside liikumise mõjul nimetatakse
hoovushälbeks.
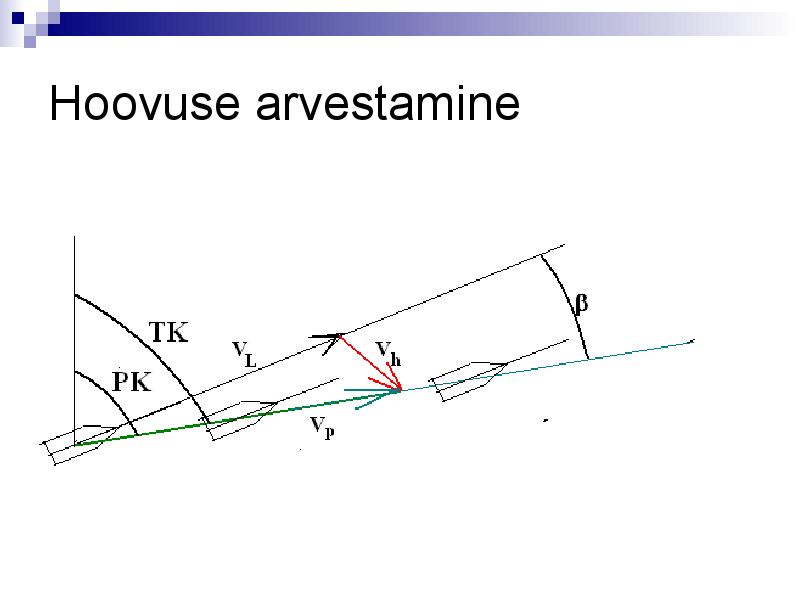
Suund, mida mööda laev li gub hoovuse mõjul
nimetatakse põhjakursiks (PK)
Nurka TK ja PK vahel nimetatakse
hoovusenurgaks (β)
Kui hoovus on pakpoordi, siis β loetakse “+”, kui
tüürpoordi, si s “-” märgiga
Seega hoovusest tingitud nurga märk on
positiivne kui PKTK ja
miinus kui
PKTK. Kõik on seotud järgmiste
valemitega : PK=TK+ ; TK=PK-; =PK-
TK.
Kui hoovuses sõitvale laevajuhile on teada hoovuse
elemendid, tuleb tal lahendada järgmisi ülesandeid:
määrata põhja kurss ja põhja ki rus, teades tõelist
kurssi ja kiirust logi järgi.
Määrata laeva tõeline kurss ja tõeline kiirus, teades
põhjakurssi ja ki rust logi järgi.
Hoovused :
- alalised (passaattuultest – Golfi hoovus; aastast
aastasse ei muutu),
- perioodilised (mussoontuultest või
looded ;
muutuvad teatud
seaduspärasuse järgi),
-
ajutised (juhuslikud; võivad muutuda äkki)
- pinna-, süvavee- ja põhjahoovused
- hõõrdelised (alalised, perioodilised, ajutised)
- gravitatsioonihoovused (looded)
Andmed hoovuse elementidest: kaartidelt,
hoovuse atlastest, lootsiraamatutest
Hoovuse elemendid
Hoovuseid iseloomustab nende li kumise suund ja
kiirus. Hoovuse suunda loetakse kraadides
ringsüsteemis sel esse horisondi punkti, kuhu veemassid
li guvad. Hoovuse kiirust mõõdetakse sõlmedes või
kaabeltaudes tunnis.
Kaabeltau – kbt – 1/10 mi li = 185 m; 1 mi l = 10 kbt
Hoovuse arvestamine
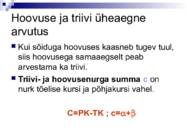
Hoovuse ja triivi üheaegne
arvutus
Kui sõiduga hoovuses kaasneb tugev tuul,
siis hoovusega samaaegselt peab
arvestama ka triivi.
Triivi- ja hoovusenurga summa c on
nurk tõelise kursi ja põhjakursi vahel.
C=PK-TK ; c=
+
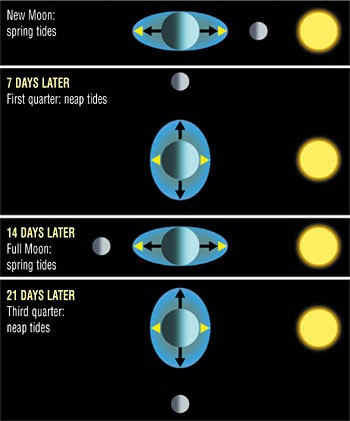
Looded
Tõusu ja mõõna hoovused – LUNAR TIDES
Tekib süsteemi Maa-Kuu pöörlemise
tsentrifugaaljõu ja Kuu-Päikese
gravitatsiooni jõu ehk raskusjõu mõjul, mis
avaldub kõigi kehade vastastikuses
tõmbumises
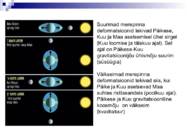
Süsüügia ja kvadratuur
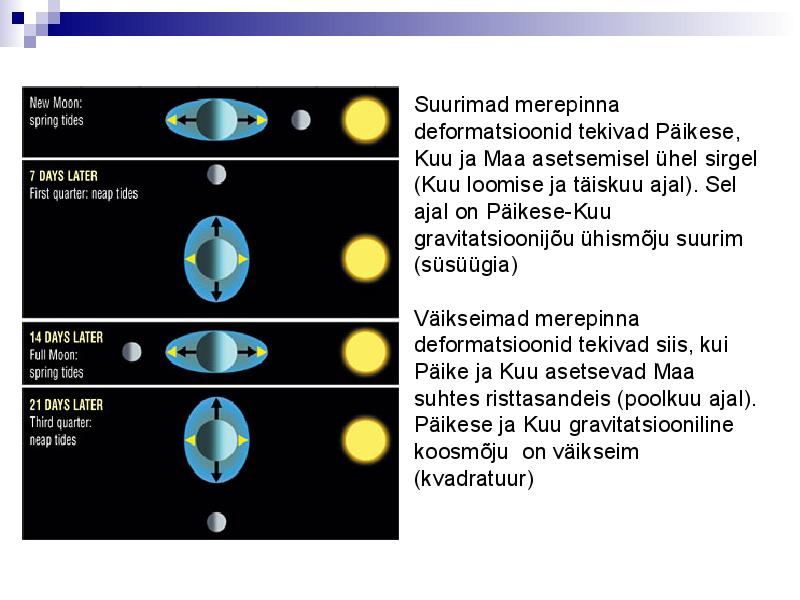
Suurimad merepinna
deformatsioonid tekivad Päikese,
Kuu ja Maa asetsemisel ühel sirgel
(Kuu loomise ja täiskuu ajal). Sel
ajal on Päikese-Kuu
gravitatsioonijõu ühismõju suurim
(süsüügia)
Väikseimad merepinna
deformatsioonid tekivad si s, kui
Päike ja Kuu asetsevad Maa
suhtes risttasandeis (
poolkuu ajal).
Päikese ja Kuu gravitatsiooniline
koosmõju on väikseim
(kvadratuur)
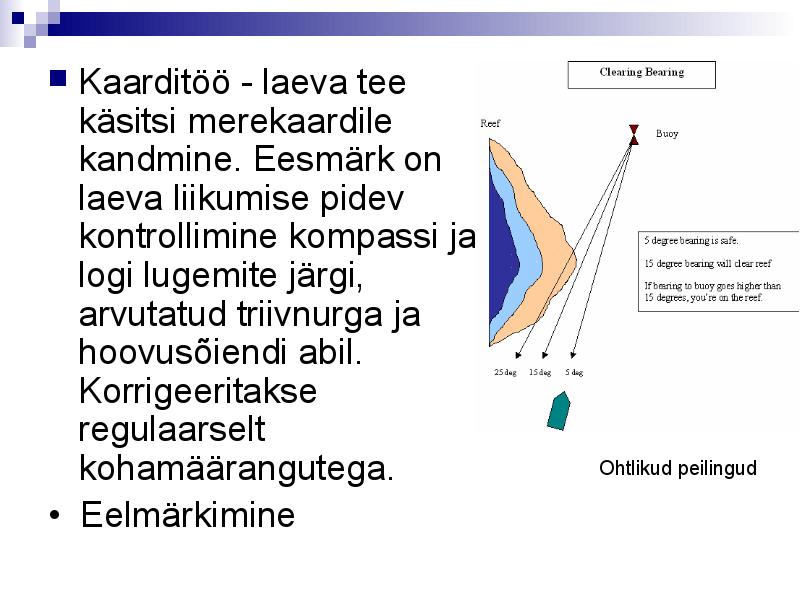
Kaarditöö - laeva tee
käsitsi merekaardile
kandmine. Eesmärk on
laeva liikumise pidev
kontrollimine kompassi ja
logi lugemite järgi,
arvutatud triivnurga ja
hoovusõiendi abil.
Korrigeeritakse
regulaarselt
kohamäärangutega.
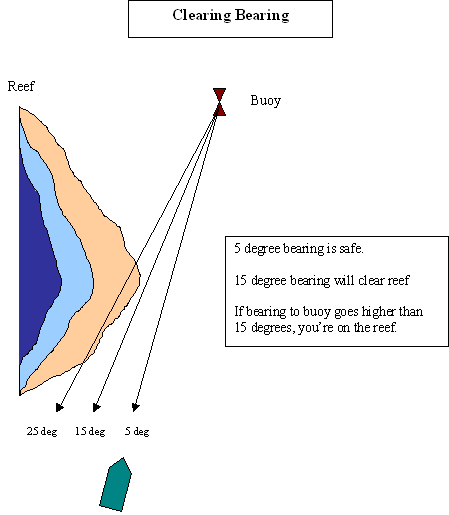
Ohtlikud
peilingud • Eelmärkimine
Observeerimine on laeva asukoha
kindlaksmääramine.
Navigatsiooniline observeerimine põhineb
navigatsiooniliste orientiiride vaatlusel –
peilimisel, rõht- ja püstnurkade ning
kauguste mõõtmisel.
Visuaalseid kohamääramise
viise
Liitsihtide (
tehislike ja looduslike) järgi
Kompassipeilingu järgi
Sektortulede järgi
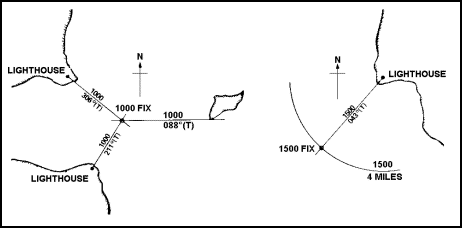
Asukoha määramine:
Kahe ja kolme peilingu järgi
Peilingu või kauguse ja rõhtnurga järgi
Kahe rõhtnurga järgi
Peilingu ja kauguse järgi
Kahe kauguse järgi
Ristpeilingu järgi
Peilingu ja sügavuse järgi
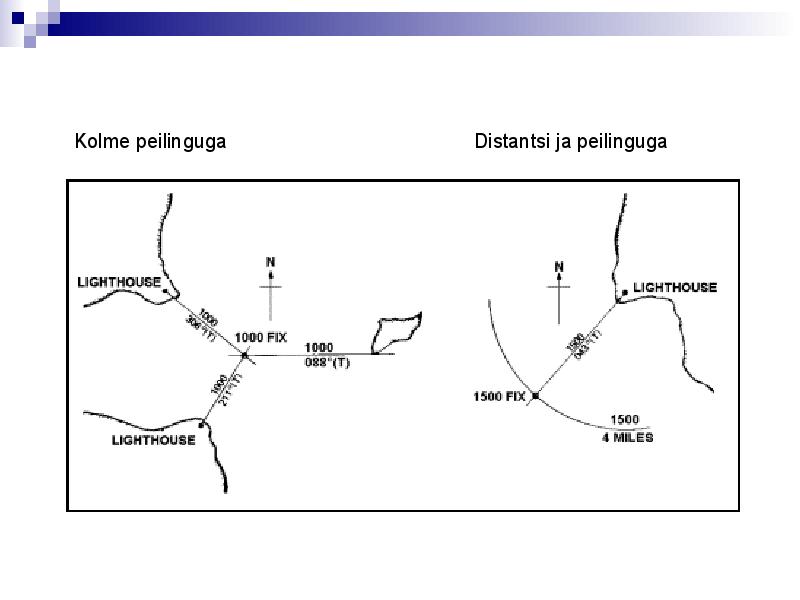
Kolme peilinguga
Distantsi ja peilinguga
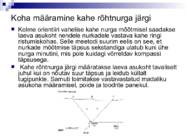
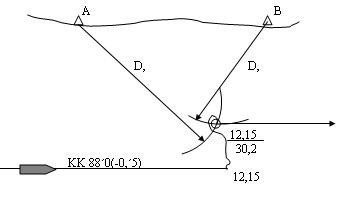
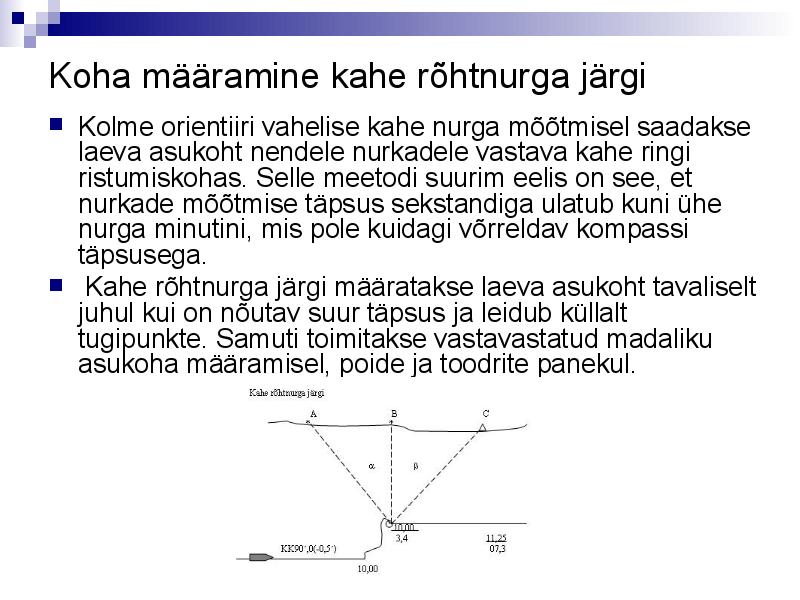
Koha määramine kahe rõhtnurga järgi
Kolme orienti ri vahelise kahe nurga mõõtmisel saadakse
laeva asukoht nendele nurkadele vastava kahe ringi
ristumiskohas. Sel e meetodi suurim eelis on see, et
nurkade mõõtmise täpsus sekstandiga ulatub kuni ühe
nurga minutini, mis pole kuidagi võrreldav kompassi
täpsusega.
Kahe rõhtnurga järgi määratakse laeva asukoht tavaliselt
juhul kui on nõutav suur täpsus ja leidub kül alt
tugipunkte. Samuti toimitakse vastavastatud madaliku
asukoha määramisel, poide ja toodrite panekul.
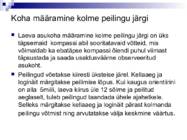
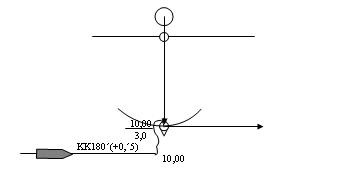
Koha määramine kolme peilingu järgi
Laeva asukoha määramine kolme peilingu järgi on üks
täpsemaid kompassi abil sooritatavaid võtteid, mis
võimaldab ka ebatäpse kompassi õiendi puhul vi mast
täpsustada ja saada usaldusväärne observeeritud
asukoht.
Peilingud võetakse kiiresti üksteise järel. Kel aaeg ja
loginäit märgitakse peilimise lõpus. Kui kaugus orienti rini
on al a 5mi li, laeva kiirus üle 12 sõlme ja peilitud
aeglaselt, tuleb peilingud taandada ühele ajahetkele.
Sel eks märgitakse kel aaeg ja loginäit pärast kolmanda
peilingu võtmist ning arvutatakse välja keskmine väärtus.
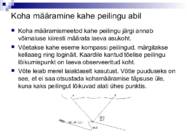
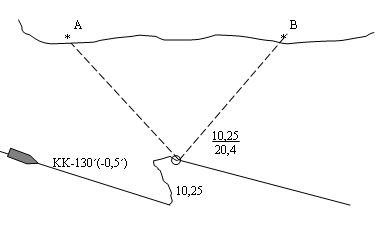
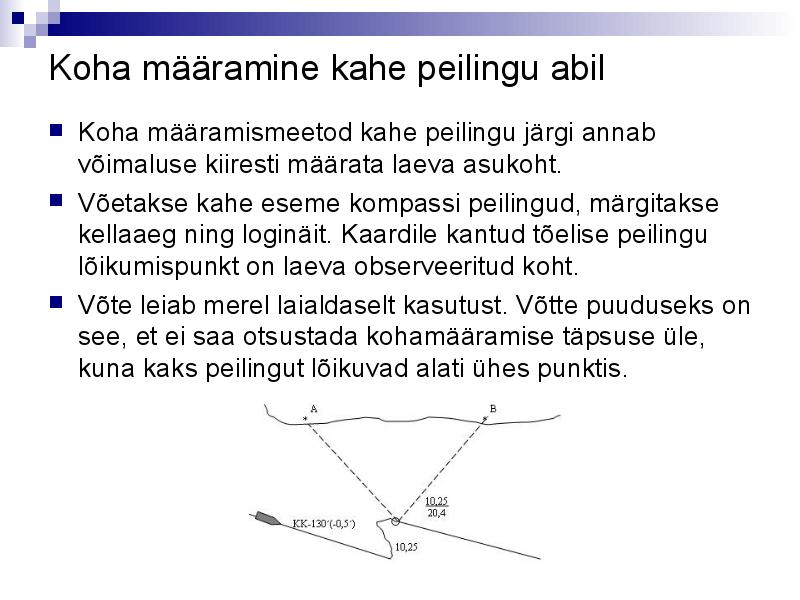
Koha määramine kahe peilingu abil
Koha määramismeetod kahe peilingu järgi annab
võimaluse kiiresti määrata laeva asukoht.
Võetakse kahe eseme kompassi peilingud, märgitakse
kellaaeg ning loginäit. Kaardile
kantud tõelise peilingu
lõikumispunkt on laeva observeeritud koht.
Võte leiab merel laialdaselt
kasutust . Võtte puuduseks on
see, et ei saa otsustada kohamääramise täpsuse üle,
kuna kaks peilingut lõikuvad alati ühes punktis.
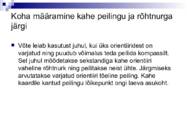
Koha määramine kahe peilingu ja rõhtnurga
järgi
Võte leiab kasutust juhul, kui üks orienti ridest on
varjatud ning puudub võimalus teda peilida kompassilt.
Sel juhul mõõdetakse sekstandiga kahe orienti ri
vaheline rõhtnurk ning peilitakse neist ühte. Järgmiseks
arvutatakse varjatud orienti ri tõeline peiling. Kahe
kaardile kantud peilingu lõikepunkt ongi laeva asukoht.
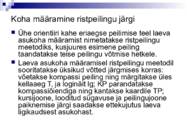
Koha määramine ristpeilingu järgi
Ühe orienti ri kahe eriaegse peilimise teel laeva
asukoha määramist nimetatakse ristpeilingu
meetodiks ,
kusjuures esimene peiling
taandatakse teise peilingu võtmise hetkele.
Laeva asukoha määramisel ristpeilingu meetodil
sooritatakse üksikud võtted järgmises korras:
võetakse kompassi peiling ning märgitakse üles
kellaaeg T, ja loginäit lg; KP parandatakse
kompassiõiendiga ning kantakse kaardile TP;
kursijoone, looditud sügavuse ja peilingujoone
paiknemise järgi saadakse
ettekujutus laeva
ligikaudsest asukohast.
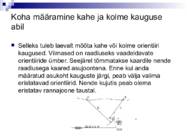
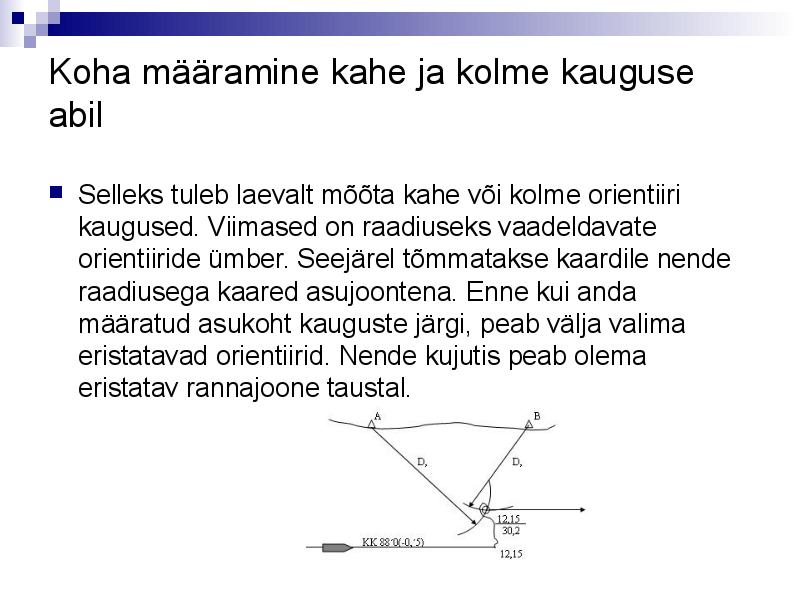
Koha määramine kahe ja kolme kauguse
abil
Sel eks tuleb laevalt mõõta kahe või kolme orienti ri
kaugused. Vi mased on raadiuseks vaadeldavate
orienti
ride ümber. Seejärel tõmmatakse kaardile nende
raadiusega
kaared asujoontena. Enne kui anda
määratud asukoht kauguste järgi, peab välja
valima eristatavad orienti rid. Nende kujutis peab olema
eristatav rannajoone taustal.
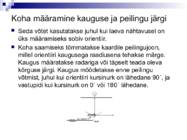
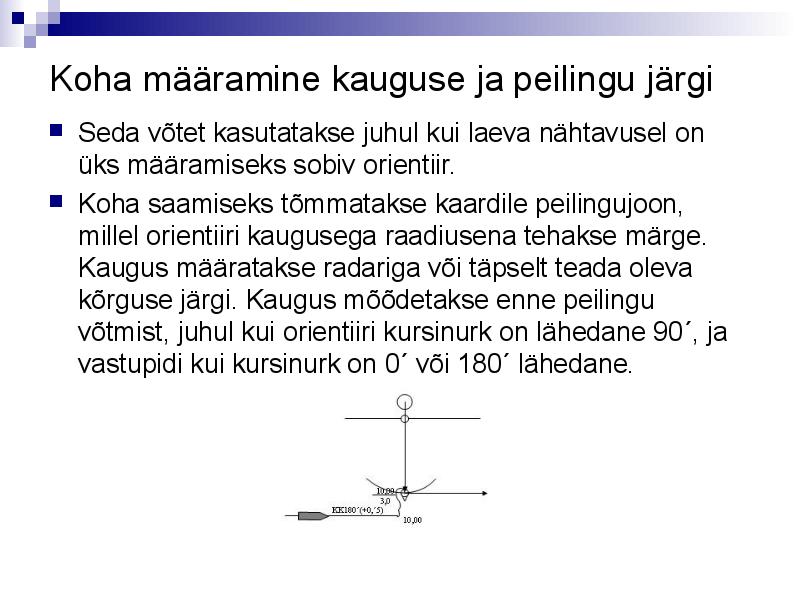
Koha määramine kauguse ja peilingu järgi
Seda võtet kasutatakse juhul kui laeva nähtavusel on
üks määramiseks sobiv orienti r.
Koha saamiseks tõmmatakse kaardile peilingujoon,
mil el orienti ri kaugusega raadiusena tehakse märge.
Kaugus määratakse radariga või täpselt teada oleva
kõrguse järgi. Kaugus mõõdetakse enne peilingu
võtmist, juhul kui orienti ri kursinurk on
lähedane 90´, ja
vastupidi kui kursinurk on 0´ või 180´ lähedane.
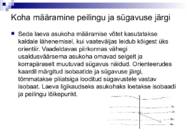
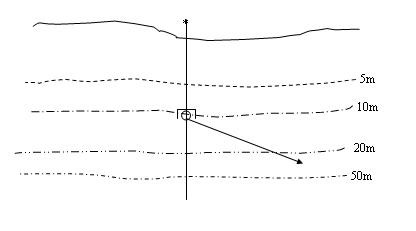
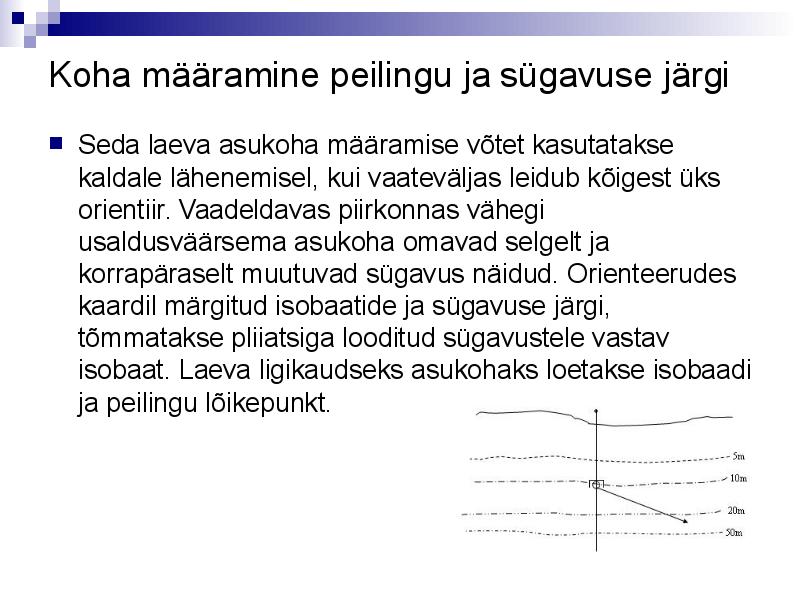
Koha määramine peilingu ja sügavuse järgi
Seda laeva asukoha määramise võtet kasutatakse
kaldale lähenemisel, kui vaateväljas leidub kõigest üks
orienti r. Vaadeldavas pi rkonnas vähegi
usaldusväärsema asukoha omavad selgelt ja
korrapäraselt muutuvad sügavus näidud. Orienteerudes
kaardil märgitud isobaatide ja sügavuse järgi,
tõmmatakse pli atsiga looditud sügavustele vastav
isobaat. Laeva ligikaudseks asukohaks loetakse isobaadi
ja peilingu lõikepunkt.
Koha määramine peilingu ja vertikaalnurga
abil
Tuleb võtta peiling ja kohe seejärel mõõta sekstandiga
majaka või mistahes orienti ri, mil e kõrgust me teame,
vertikaalnurk ja minna tabelisse. Oma silmakõrgus tuleb
lahutada majaka silmakõrgusest ja seejärel saame
tabelist orienti ri ja meie vahelise kauguse. Seejärel tuleb
see kaugus kanda majakast peilingu joonele ja
ristumiskoht ongi meie asukoht.
Navigeerimise tüübid
Lootsimine – aluse juhtimine kitsustes
Laakimine – aluse asukoha ettearvutamine
Astronavigatsioon – aluse juhtimine
taevakehade järgi
Tehniline navigatsioon – aluse juhtimine
navigatsiooniseadmete (nt
radar ) ja/või
navigatsioonisüsteemide (nt GPS) järgi
Raadionavigatsioon – kasutatakse
raadiolaineid Radarnavigatsioon – kasutatakse radarit
Satel i tnavigatsioon – kasutatakse Maa tehiskaaslasi
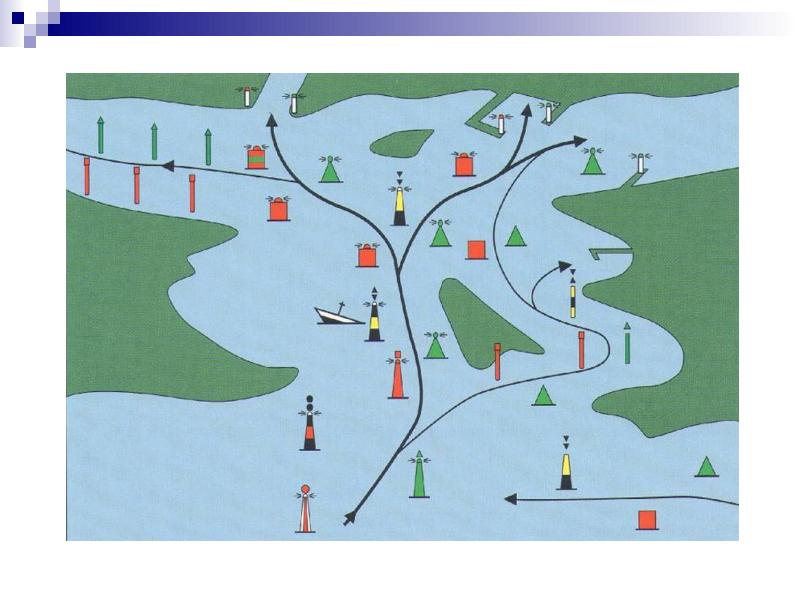
Meremärgid
Meresõidu ohtude ja faarvaatrite tähistamiseks
ning laeva asukoha määramiseks kasutatakse
meremärke, mida paigutatakse rannale või
vette. Esimesel juhul on tegemist ranna-, teisel
aga ujuvmärkidega.
Rannamärgid on tuletornid,
tulepaagid ja
päevamärgid
Ujuvmärgid on poid ja toodrid
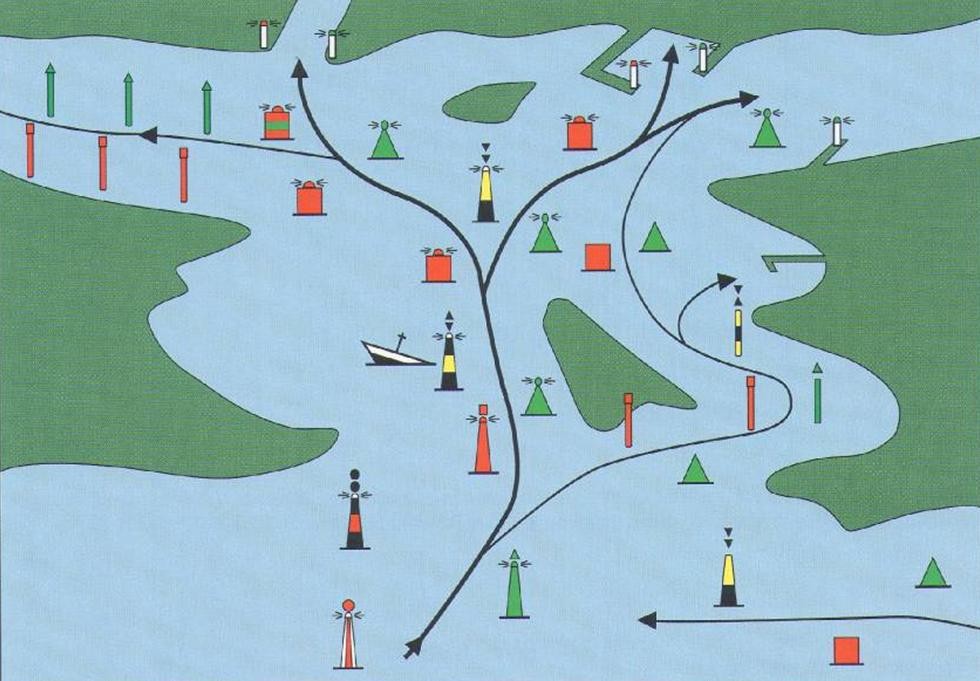
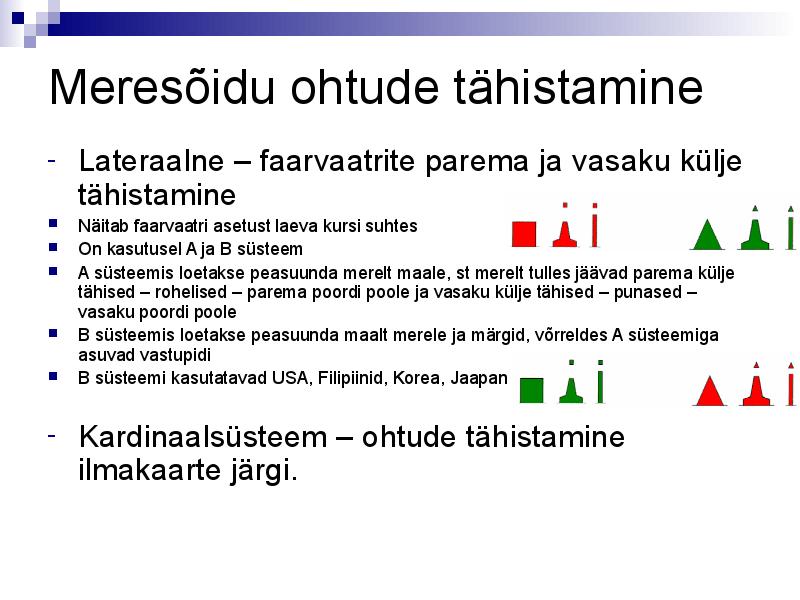
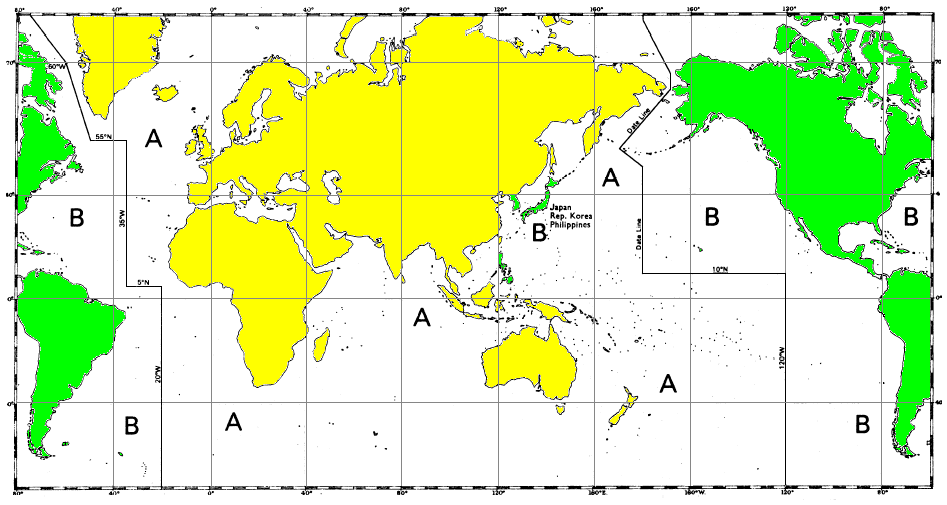
Meresõidu ohtude tähistamine
-
Lateraalne – faarvaatrite parema ja vasaku külje
tähistamine
Näitab faarvaatri asetust laeva kursi suhtes
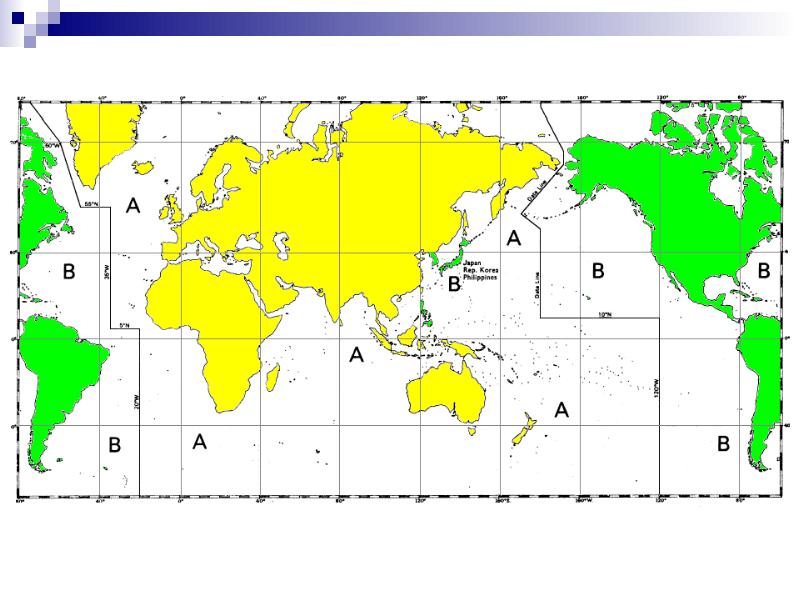
On kasutusel A ja B süsteem
A süsteemis loetakse peasuunda
merelt maale, st merelt tulles jäävad parema külje
tähised – rohelised – parema poordi poole ja vasaku külje tähised – punased –
vasaku poordi poole
B süsteemis loetakse peasuunda maalt merele ja märgid, võrreldes A süsteemiga
asuvad vastupidi
B süsteemi kasutatavad USA,
Filipiinid , Korea, Jaapan
- Kardinaalsüsteem – ohtude tähistamine
ilmakaarte järgi.
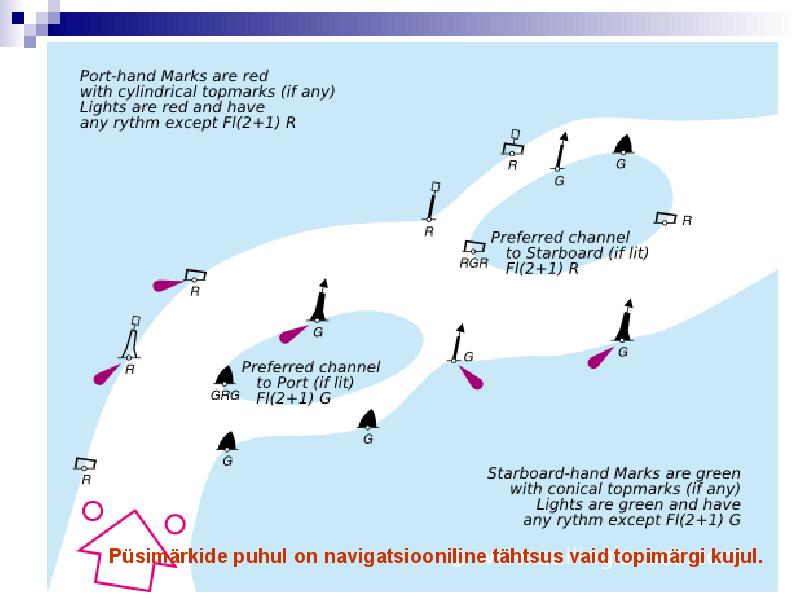
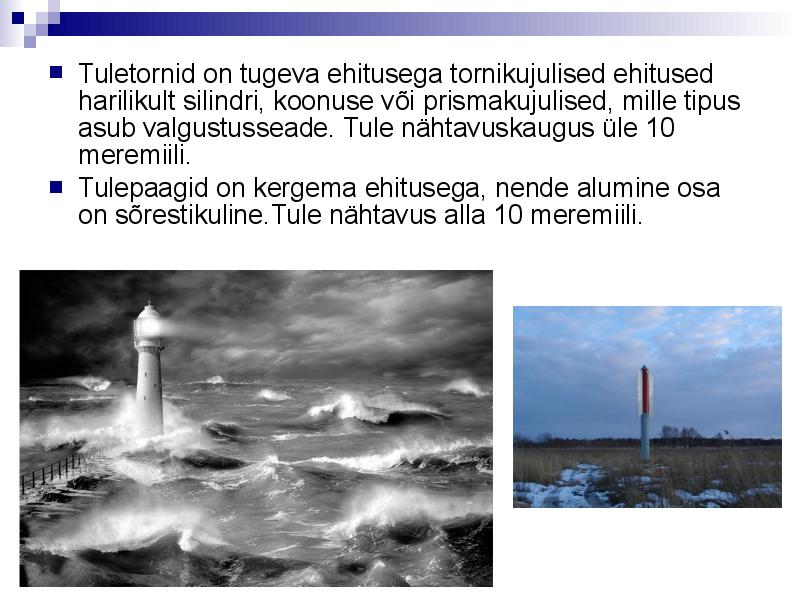
Püsimärkide puhul on navigatsiooniline tähtsus vaid topimärgi kujul. Tuletornid on tugeva ehitusega tornikujulised
ehitused harilikult silindri,
koonuse või prismakujulised, mil e tipus
asub valgustusseade. Tule nähtavuskaugus üle 10
meremi li.
Tulepaagid on kergema ehitusega, nende alumine osa
on sõrestikuline.Tule nähtavus al a 10 meremi li.
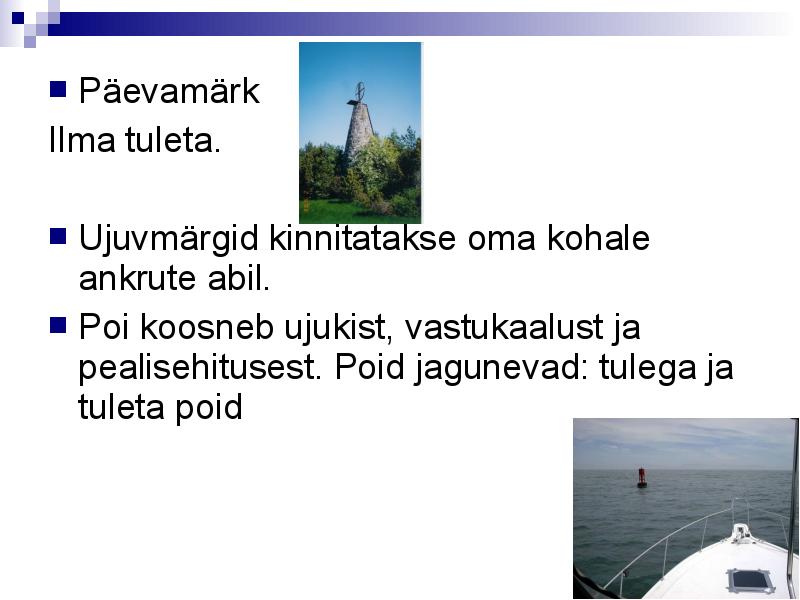
Päevamärk
Ilma tuleta.
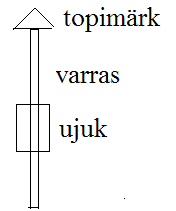
Ujuvmärgid kinnitatakse oma kohale
ankrute abil.
Poi koosneb ujukist, vastukaalust ja
pealisehitusest. Poid jagunevad: tulega ja
tuleta poid
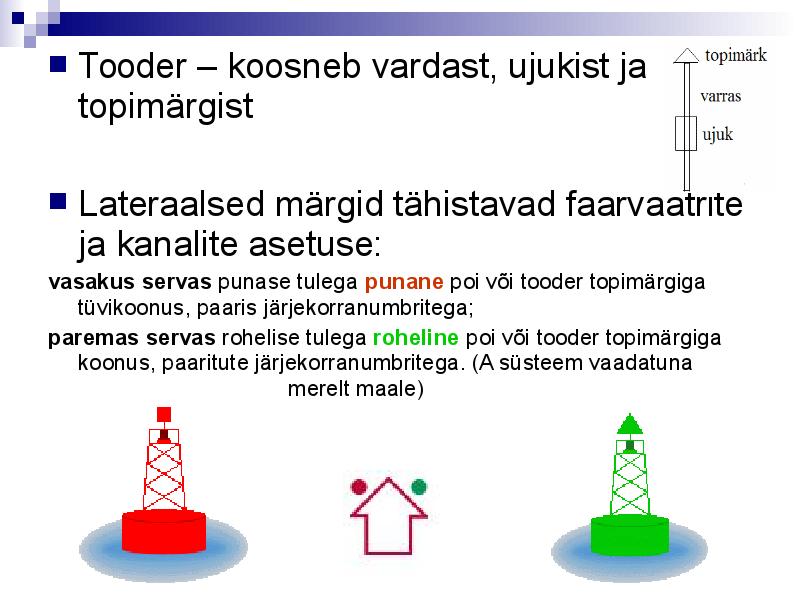
Tooder – koosneb vardast, ujukist ja
topimärgist
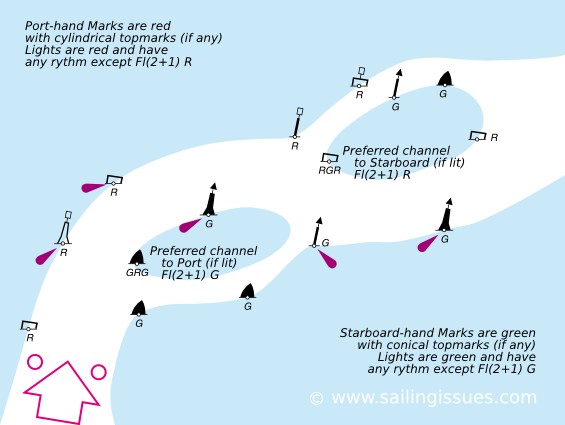
Lateraalsed märgid tähistavad faarvaatrite
ja
kanalite asetuse :
vasakus servas punase tulega
punane poi või tooder topimärgiga
tüvikoonus, paaris järjekorranumbritega;
paremas servas rohelise tulega
roheline poi või tooder topimärgiga
koonus, paaritute järjekorranumbritega. (A süsteem vaadatuna
merelt maale)
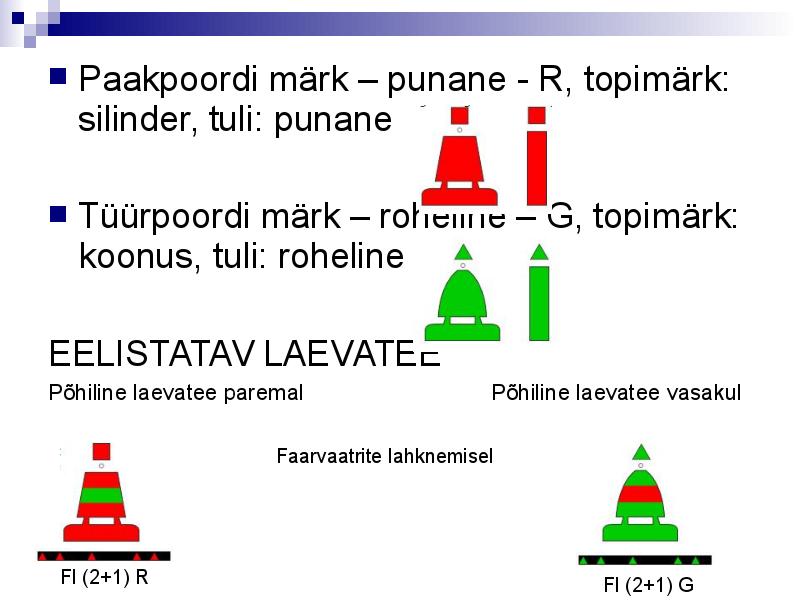
Paakpoordi märk – punane - R, topimärk:
silinder , tuli: punane
Tüürpoordi märk – roheline – G, topimärk:
koonus, tuli: roheline
EELISTATAV
LAEVATEE Põhiline laevatee paremal
Põhiline laevatee vasakul
Faarvaatrite lahknemisel
Fl (2+1) R
Fl (2+1) G
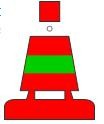
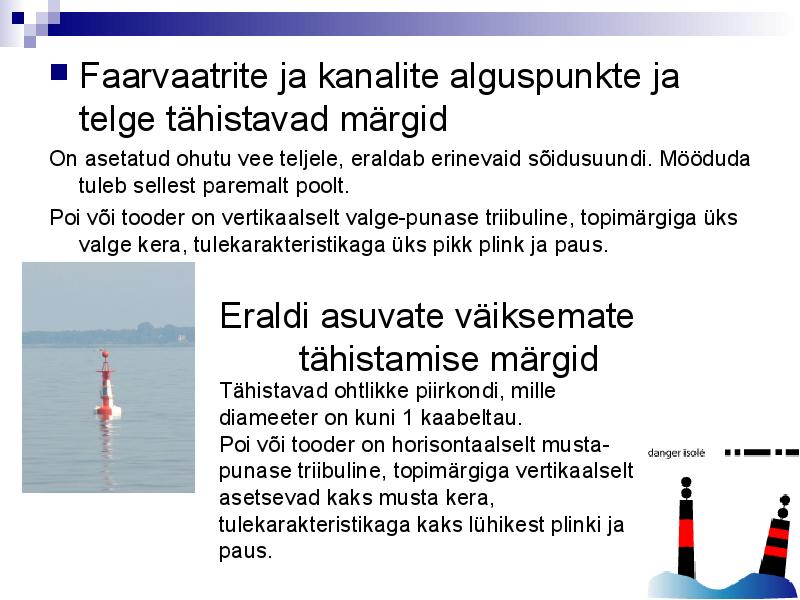
Faarvaatrite ja kanalite
alguspunkte ja
telge tähistavad märgid
On asetatud ohutu vee teljele, eraldab erinevaid sõidusuundi. Mööduda
tuleb sel est paremalt poolt.
Poi või tooder on vertikaalselt valge-punase triibuline, topimärgiga üks
valge kera, tulekarakteristikaga üks pikk
plink ja
paus .
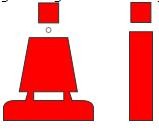
Eraldi asuvate väiksemate
ohtude
tähistamise märgid
Tähistavad ohtlikke piirkondi, mil e
diameeter on kuni 1 kaabeltau.
Poi või tooder on horisontaalselt musta-
punase tri buline, topimärgiga vertikaalselt
asetsevad kaks musta kera,
tulekarakteristikaga kaks lühikest
plinki ja
paus.
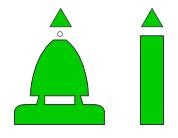
Faarvaateri keskjoone märk
Märgistab ohutut vett märgi ümbruses. Tuli: Iso, Oc, LFl10s
Eriotstarbelised märgid
Tähistavad spetsiaalseid objekte.
Poi või tooder on kollane, topimärgiga kollane horisontaalne
rist , plinkiv kollane tuli.
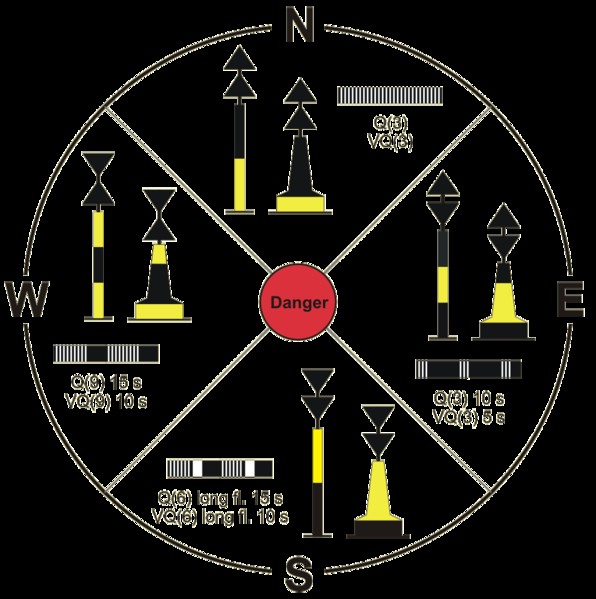
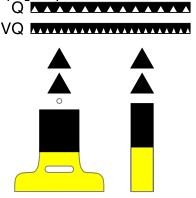
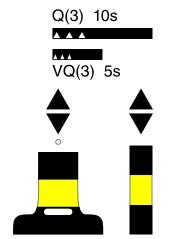
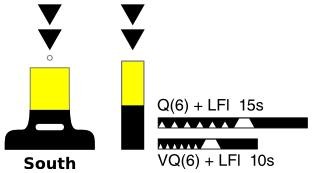
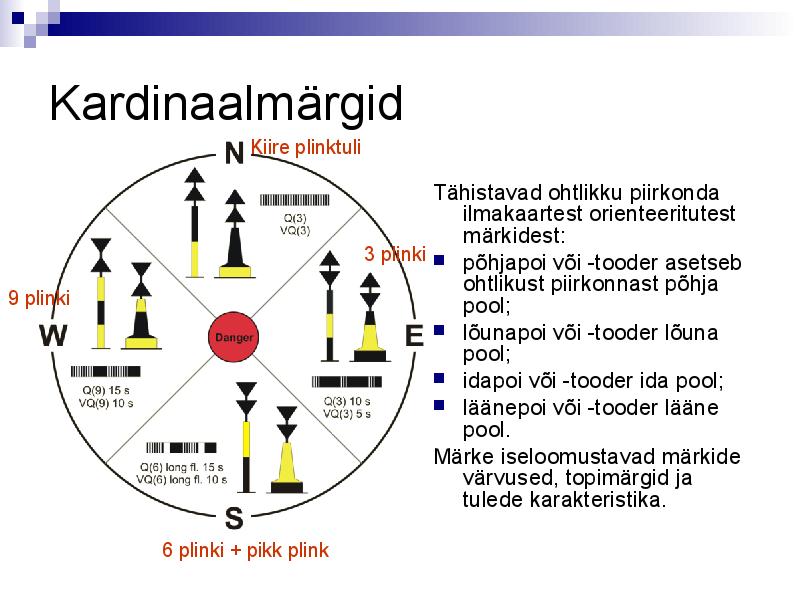
Kardinaalmärgid
Kiire plinktuli
Tähistavad ohtlikku pi rkonda
ilmakaartest orienteeritutest
märkidest:
3 plinki põhjapoi või -tooder asetseb
ohtlikust piirkonnast põhja
9 plinki
pool;
lõunapoi või -tooder lõuna
pool;
idapoi või -tooder ida pool;
läänepoi või -tooder lääne
pool.
Märke iseloomustavad märkide
värvused, topimärgid ja
tulede karakteristika.
6 plinki + pikk plink
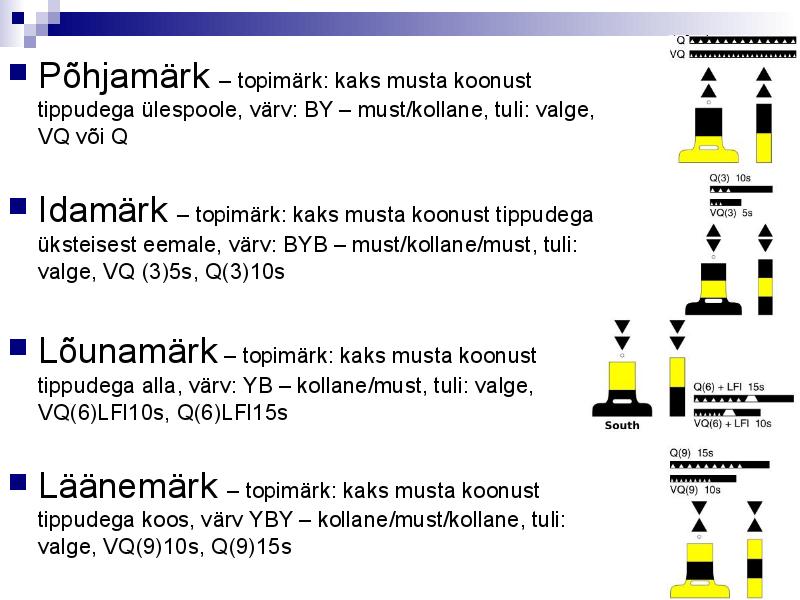
Põhjamärk – topimärk: kaks musta koonust
tippudega ülespoole, värv: BY – must/kol ane, tuli: valge,
VQ või Q
Idamärk – topimärk: kaks musta koonust tippudega
üksteisest eemale, värv: BYB – must/kol ane/must, tuli:
valge, VQ (3)5s, Q(3)10s
Lõunamärk – topimärk: kaks musta koonust
tippudega al a, värv: YB – kol ane/must, tuli: valge,
VQ(6)LFl10s, Q(6)LFl15s
Läänemärk – topimärk: kaks musta koonust
tippudega koos, värv YBY – kollane/must/kol ane, tuli:
valge, VQ(9)10s, Q(9)15s
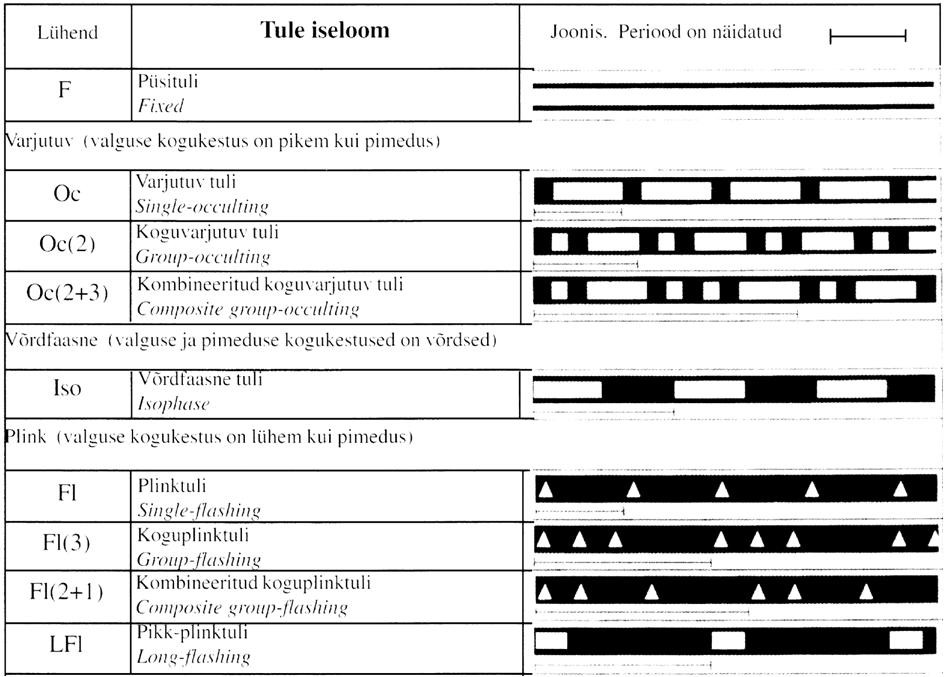
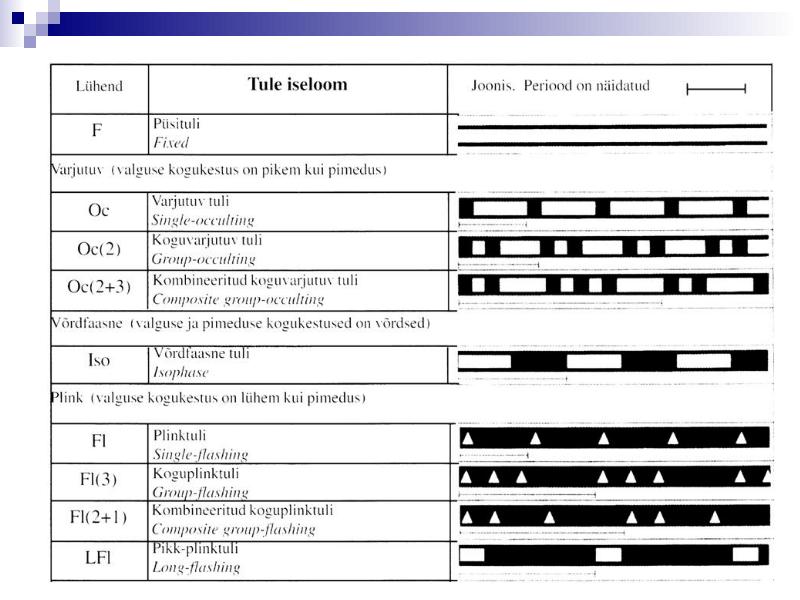
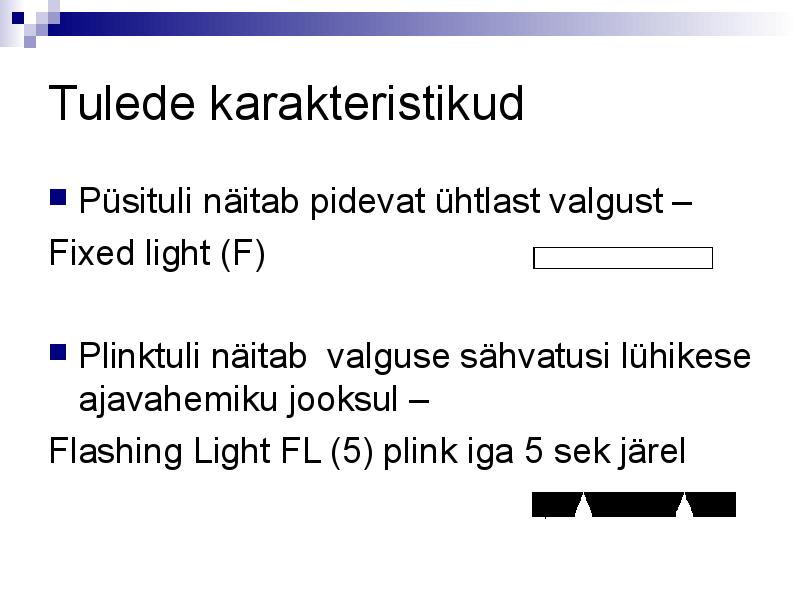
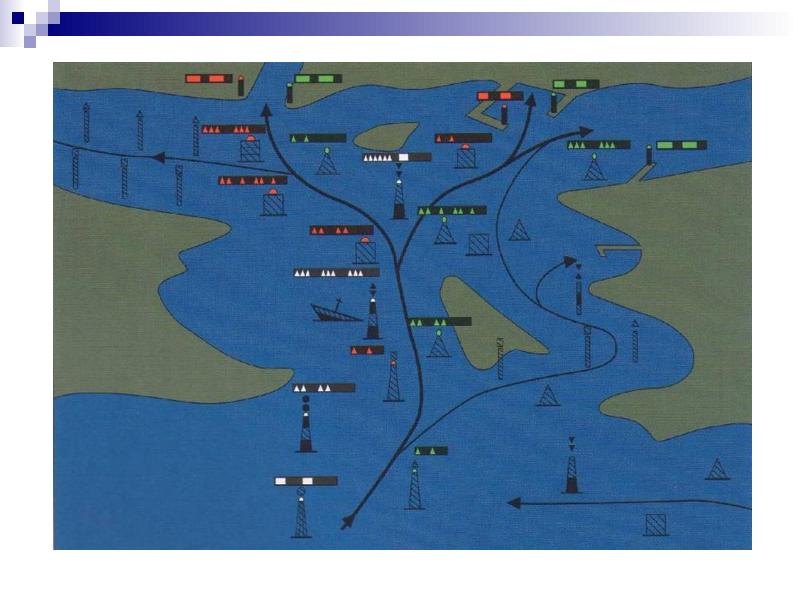
Tulede karakteristikud
Püsituli näitab pidevat ühtlast valgust –
Fixed light (F)
Plinktuli näitab valguse sähvatusi
lühikese ajavahemiku jooksul –
Flashing
Light FL (5) plink iga 5 sek järel
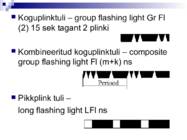
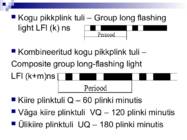
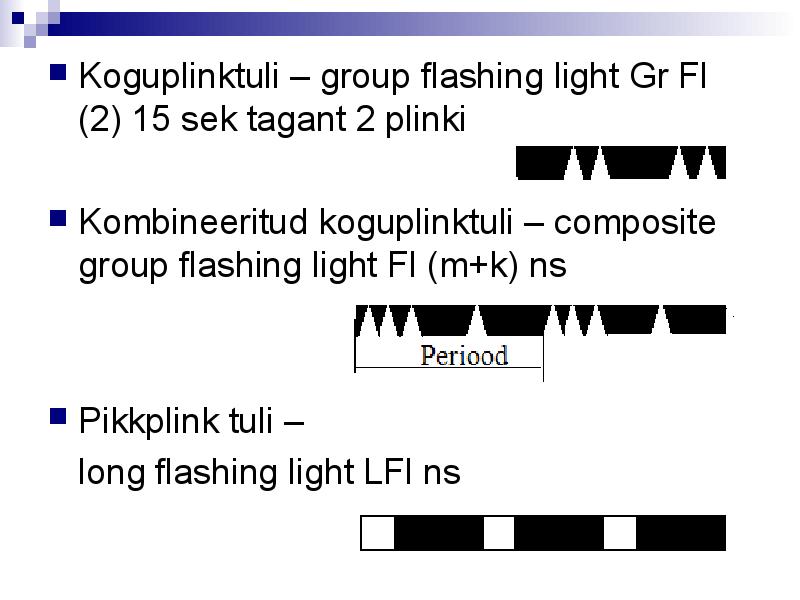
Koguplinktuli – group flashing light Gr Fl
(2) 15 sek tagant 2 plinki
Kombineeritud koguplinktuli –
composite group flashing light Fl (m+k) ns
Pikkplink tuli –
long flashing light LFl ns
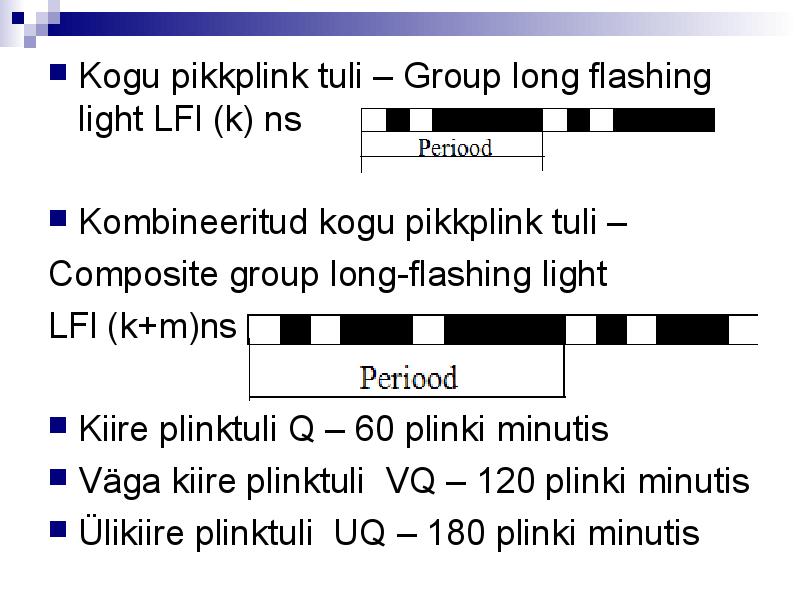
Kogu pikkplink tuli – Group long flashing
light LFl (k) ns
Kombineeritud kogu pikkplink tuli –
Composite group long-flashing light
LFl (k+m)ns
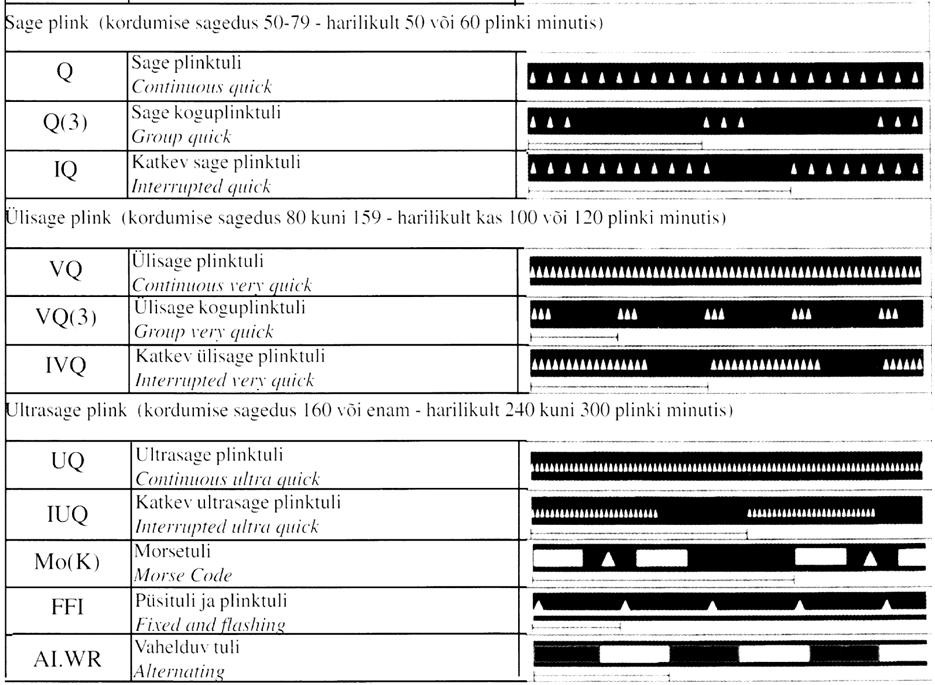
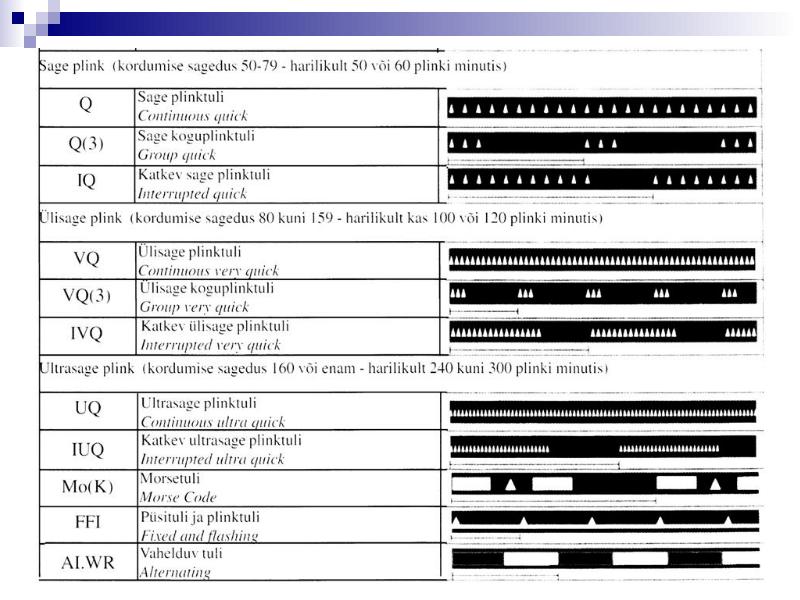
Kiire plinktuli Q – 60 plinki minutis
Väga kiire plinktuli VQ – 120 plinki minutis
Ülikiire plinktuli UQ – 180 plinki minutis
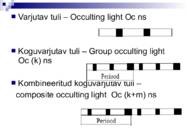
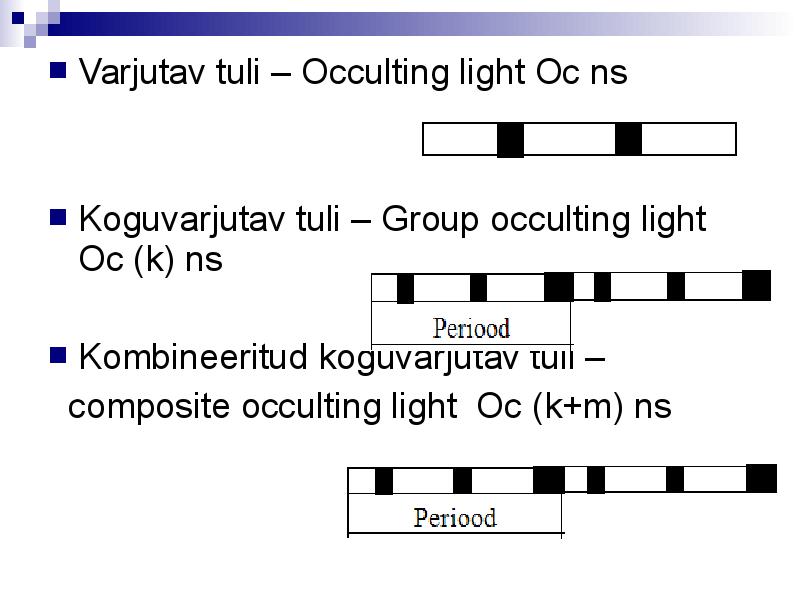
Varjutav tuli – Occulting light Oc ns
Koguvarjutav tuli – Group occulting light
Oc (k) ns
Kombineeritud koguvarjutav tuli –
composite occulting light Oc (k+m) ns
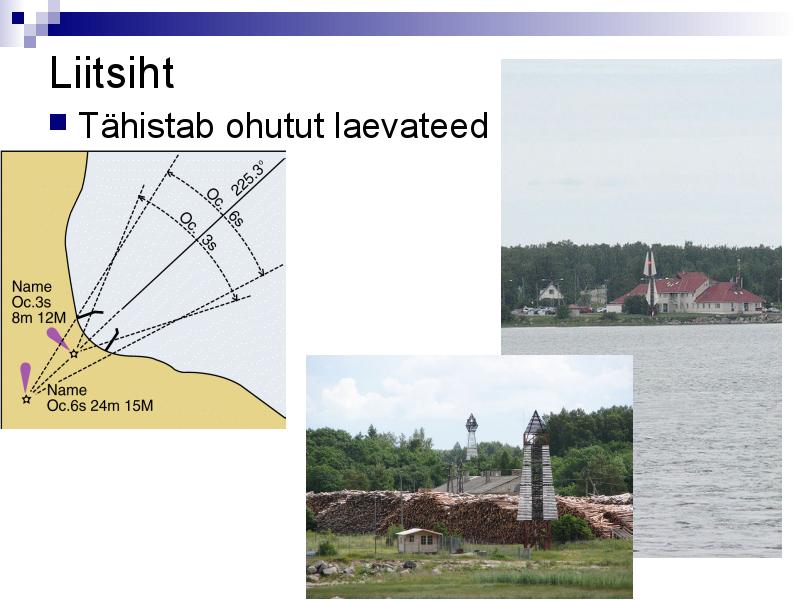
Liitsiht
Tähistab ohutut laevateed
Reisiplaneerimine
Reisi
planeerimine algab reisil esineda võivate ohtude ja
riskide analüüsist võimaluste otsingust nende riskide
vältimiseks või mõisliku kompromisslahenduse
leidmiseks.
Kaartide ja
teatmike korrektuur Lootsiraamatute jt teatmike kasutamine
Eelkaarditöö väikese mastaabiga kaardil
Eelkaarditöö sõidukaardil, tuletornide nähtavaletulek
Kaugus kaldast ja ohtudest, keelatud alad
Keskmine V, T ja S, pöördepeilingud ja D
Varjusadamad, ankrupaigad, saared, ps
Sadamatesse sisenemine ja väljumine
Looded, lüüsid,
sildumine
Kaardid
Komplekteeri ja aseta õigesse
järjekorda kõik planeeritavaks reisiks
vajalikud kaardid. Kaardid, mis pole kül otseselt vajalikud antud
reisi jaoks, peavad samuti olema valmis pandud. Kindlusta, et
kõik kaardid ja
juhendmaterjalid oleks korrigeeritud vi maste
saadaolevate “
Teated Meremeestele” ja navigatsioonihoiatuste
järgi. Analoogilist korrektuuri tuleb teha ka reisi jooksul kui plaan
on täielikult valmis või tekib vajadus teha muudatusi reisiplaanis.
Meresõiduks ohtlikud ja kõlbmatud alad
Tuleb läbi töötada suudmealade ja rannaäärsed kaardid, et leida
kõik alad kus laev ei saa ohutult sõita,
tuues need esile kas
silmatorkava värviga või vi rutamise teel, vältides vajaliku info
(meremärkide, orienti ride ja muu) juhusliku kustutamist või
silmapaistmatuks muutumist. Rajoonides, kus veetaseme
kõikumised
loodete mõjul ei ole väga suured tuleb
meresõidukõlbmatuks lugeda kõik alad, kus sügavused kaardil
on väiksemad kui laeva süvis antud reisil. Navigeerimisel
väikeste sügavustega aladel, kus looded on tugevad, tuleb
silmas pidada, et sõltuvalt veetaseme kellaajast võib ala ol a
meresõiduks kõlbulik või mitte.
Ohutuspiir Enne kursside kaardile kandmist peab
määrama ohutu kauguse, mida on vaja
järgida ohtlikust alast möödumisel. Kui koha määrang on kaardile kantud,
määrab see laeva kaptenisilla asukoha kohamääramise hetkel. Suurte
laevade puhul võib juhul, kui kaardile kantud koht asub ohtlikust alast väljas
laeva mõni osa ol a ometi ohtlikul alal. Ohutuspi r ohtliku ala ümber peab
olema selline, et laeva iga osa ka kõige halvemal juhul ei puudutaks
ohuobjekti.
Faktorid mida tuleb arvesse sel ise pi ri määramisel on järgmised:
laeva mõõtmed
kasutusel olevad navigatsioonisüsteemide täpsused
looded ja hoovused
laeva manööverdamis-omadused
Ohupiirid tuleb määrata nii, et neid oleks võimalik kiiresti ja kergelt kontrol ida ning
nad peavad olema seotud
kasutatava navigatsioonisüsteemiga (ohupeiling,
paral eelindeksid või muu lihtsalt kontrol itav
moodus ). Ohutuspiir näitab, kui
kaugele võib laev ettenähtud kursist kõrvale kalduda. Ohutuse pi ri
kriteeriumiks võib lugeda seda, kui jääb sügavusele süvis +20%, kuid igas
konkreetses olukorras võib kli rens olla ka suurem kui +20%, lähtudes sel est,
et:
sügavus uuringud on
aegunud või ebatäpsed
olukorras, kus laev rullab või õõtsub pikisuunas
kui laeva süvis võib olenevalt laeva kiirusest suureneda.
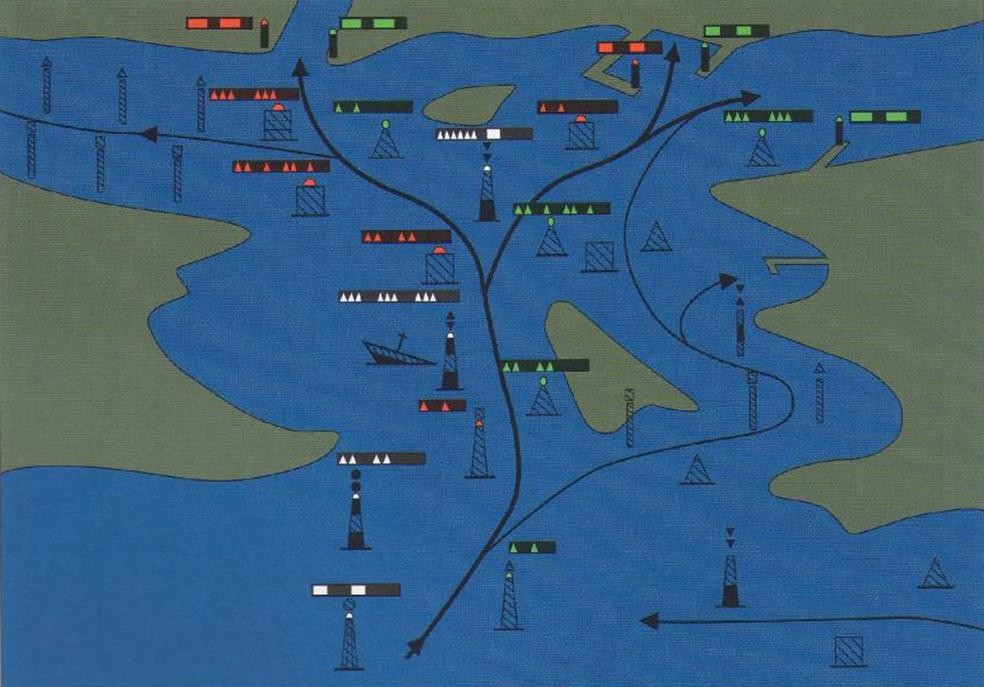
Ohutu vesi
Alasid, kus laev võib ohutult kursist kõrvale kalduda,
loetakse ohututeks veteks ja need alad on pi ratud
ohutuspi ridega.
Ookeani ja avamere kursid
Ookeani- ja avamere kursid peaksid
kõigepealt olema
kantud väiksemastaabilisele kaartidele vastavalt algselt
kavandatud marsruudile. Suurringi või kombineeritud
suurringi kursid peavad kas arvutatud, saadud SATNAV-
arvutist või võetud suurringi kaartidelt, kursijooned
(rhomb lines) võib kanda kohe Mercator kaartidele, kuid
kõik peab
jääma vastavusse planeeritud marsruudiga.
Kaldaäärsed ja suudmeala kursidKaldaäärsed ja suudmeala kursid peavad samuti olema varem läbi
mõeldud ja kõigepealt kantud väikesemastaabilistele kaartidele,
soovitavalt lähtesadamast kuni sihtsadamani. See sõltub sadamate
lähedusest ja sõidurajooni kaartidest, enamikus juhtudest on vaja
kasutada rohkem kui ühte
kaarti . Need esimesed kursid
moodustavad reisiplaani aluse ja neilt võib saada vahemaad ning
ülesõidu
kestvuse . Kui on olemas väljasõidu aeg, võib ki resti
kindlaks määrata ETA, ükskõik mil ise marsruudi punkti. Tee tõeline
suund peab olema kaartidele näidatud ja kantud tegeliku tee
vahetusse lähetusse. See ei ole kurss, mida tuleb hoida, et
liikuda mööda kaardile kantud teed, ta näitab ainult suunda, mida peab
järgima.
Järgnevalt on vaja tee üle kanda suuremastaabilistele kaartidele, mis
on olemas sõidurajoonis. Tee ülekandmist
ühelt kaardilt teisele tuleb
teha väga hoolikalt olemaks veendunud, et ei ole tehtud vigu. On
soovitav kontrollida seda üleminekut mõlemal kaardil kindlaks
määratud objekti peilingu ja kauguse järgi ja kinnitada seda
üleminekut koha φ ja λ järgi.
Kaardi vahetus
Kaardile tuleb selgelt märkida, kus punktis on vaja üle minna
järgmisele kaardile, näidates ära järgmise kaardi numbri.
Tee kalkuleerimine
Ohtlikule
alale li ga lähedale minnes ei saavuta me reeglina midagi
peale tee ja vastavalt ka aja lühenemise. Isegi si s, kui sel ine
vajadus tekib, tuleb täita minimaalseid põhireegleid – laev peab
alati jääma ohutusse vette ja pi savalt kaugele ohust, et vi a
madalikule sõidu võimalus navigatsioonivae või masinarikke
korral mi nimumini.
Reeglid
Reisi planeerimisel tuleb silmas pidada nii laevaseltsi kui rahvuslike
reegleid, mis reglementeerivad kaldaäärset sõitu.
Kõrvalekaldumine planeeritud kursist
Ideaalses olukorras peab laev järgima ettekavandatud teed, kuid
praktiliselt võib ülesse kerkida vajadus kalduda sel est kõrvale,
andes teed teisele laevale. Sellisel juhul peab kõrvalekaldumine
olema pi ratud sel ega, et laev ei siseneks
aladele , kus võiks üles
kerkida risk sattuda ohutuspiirile.
Ohutu kaugusOn võimatu anda rangeid ja
kindlaid reegleid, mida peab järgima, et
laev saaks ohust puhtalt mööda. Kõik sõltub alljärgnevast:
laeva süvise ja vee sügavuse
suhtest valdavatest ilmastikutingimustest (tugev tuulohu suunas või udu, samuti
vihma võimalus nõuab ohutu kauguse suurendamist).
tõusu-mõõnahoovuse või voolu suunast ja tugevusest
liiklustihedusest
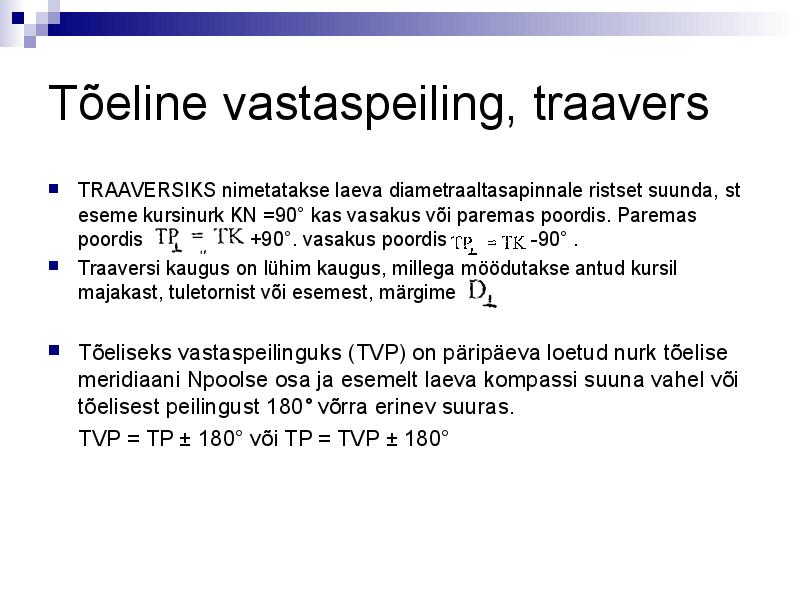
kardil oleva info
vanusest ja selle allikate usaldusväärtusest
ohtu vee lähedusest
Alljärgnevad soovitused aitavad määrata, kui kaugelt mööduda
navigatsiooni ohust:
kus kallas on järsk ja sügavused kaldast suurenevad kiiresti, on
minimaalne kaugus kaldast mööduda – 1,5-2,0 miili.
Kus kallas on lauge ja sügavused suurenevad järk järgult, peavad laeva
teel olema kindlustatud vajalik sügavusvaru (under keel clearance)-UKC
ja sellest tuleneb kaugus, millega ohust mööduda.
Laev süvisega 3-6 meetrit sõidab 10m samasügavusjoonest sügavamal.
Laev süvisega üle 10m peab kindlustama, et oleks olemas vajalik
sügavusvaru (UKC). Sõltumata UKC olemasolust peab laeval, millel
on navigatsioonioht paremas poordis, olema küllaldaselt vaba
ruumi, mis lubaks laevade lahkuminekuks muuta kurssi paremale.
Kiilualune sügavusvaruKonkreetses olukorras võib tekkida vajadus sõita vähese ki lualuse
sügavus varuga aladel. On tähtis, et vähendatud kiilualune sügavus
oleks ettearvestatu ja see ala kaardil ära märgistatud. Juhul kui
UKC on al a 10% suurimast süvisest või see on mingi teine protsent,
mis on kindlaks määratud reisi planeerimise
staadiumis , on tähtis, et
vahitüürimees
teaks seda, et on vajalik vähendada laeva kiirust, et
vähendada süvise
suurenemist laeva ki
ruse tõttu madalas vees.
Tõusu “aken”Loodete
rajoonis võib
küllaldane UKC ol a ainult si s, kui tõusulaine on
saavutanud vajaliku kõrguse. Muul ajal tuleb vaadelda
rajooni kui
meresõiduks kõlbmatut. See ohutu periood, kus tõusulaine on
saavutanud vajaliku kõrguse ja sügavused ei ohusta meresõitu – on
tekkinud nn “tõusu aken”. Peab olema selgelt määratletud, et
vahitüürimehel ei tekiks kahtlust, kas laev võib ohutult rajooni läbida
või mitte.
Hoovuse (voolu mõju) arvestamine
Avamerel tehakse laeva tee korrigeerimist tavaliselt pärast
seda, kui vool või hoovus on laeva teelt juba kõrvale
kandnud. Sel ine meetod kõlbab olukorras kus on
kaldast ja ohtudest
kauge , kui aga laeva tee läheneb
kaldale, on parem voolust ja hoovusest tulenevaid
parandusi arvesse võtta juba enne, kui nad otseselt
mõjuma hakkavad. Infot
hoovuste kohta saab hoovust
tabelist, lootsiraamatutest, raamatust “Ocean Passages
of the World”, marsruudi kaartidelt “Routing Charts”.
Hoovused sõltuvad rajoonist, vastavast aastaajast ja
ilmastikutingimustest. Sel est tulenevalt peab
vahitüürimees tähelepanelikult kontrol ima laeva
asukohta ja korrigeerima kurssi, et hoida laev
ettemääratud kursil.
Kursi muutusedSõites avamerel väiksemastaabiliste kaartide järgi tehakse kursi
muutus tavaliselt punktis, kus vana ja uus kurss lõikuvad. See
moodus ei sobi alati, sest kui laev sõidab navigatsiooniohtude
läheduse või kaldaäärsetes vetes kasutades suuremastaabilisi
kaarte. Sel juhul peab pööret alustama enne kursside lõikumist, et
pöörde lõppedes ol a
uuel kursijoonel. Pöörde alustamispunkti
kindlaks määramisel tuleb arvestada laeva manööverdamis-
omadusi, eriti pöördraadiust sõltuvalt roolilehe erinevatest
asenditest ja see punkt peab kaardil ära märgitu. Ka siis kui laev on
lootsi juhtimise al , peab vahitüürimees kontrol ima pöördepunkti
lähenemist, et alustada pööret õigeaegselt.
ParalleelindeksParalleelindeksi kasutamine on üks levinumaid
meetodeid ,
kontrol imaks laeva li kumist ettemääratud kursil nii hea kui halva
nähtavuse korral. Nagu radari kasutamise puhul ikka on si ngi
soovitav rakendada paral eelindeksi meetodit ka hea nähtavuse ja
lihtsate navigatsioonitingimuste korral, et olla selles kindel, kui laev
sattub halbadesse ilmastikutingimustesse. Paral eelindeksit saab
kasutada pöördepunkti äramärkimiseks.
ARPA kaardidARPA-sse salvestatud kaarte tuleb kasutada lisaks teistele
navigatsioonisüsteemidele, mitte aga neist eraldi, iseseisvalt.
OotamatusedReisi planeerimise ajal peab määrama kindlaks ka võimalik
tegutsemisplaani ootamatuste korral. See peab selgelt olema ära
näidatud kaardil, et vahitüürimees ei peaks hakkama kriitilises
olukorras raiskama aega tegutsemisplaani otsimiseks.
Ootamatuste plaan peaks sisaldama:
alternatiivsed marsruudid
ohutud ankruplatsid
oote
rajoonid varukaid sadamas
On arusaadav, et hädaolukorras võivad ülesse kerkida rajoonides, kus
laeva
manööverdamine võib olla limiteeritud süvisega või loodetega,
kui laev võib rajooni siseneda ainult tõusu “
aknas ”. Sellised
pi rangud peavad olema kindlasti ära näidatud.
Eelseisva reisi analüüsEelseisvat reisi analüüsitakse tüürimeeste koosolekul. Analüüsi aluseks
on teave sõidurajooni navigatsiooniohtudest ja muudest
iseärasustest ja see viiakse läbi vastavalt
kapteni poolt määratud
mahule. Analüüsi valmistab ette ja viib läbi kapten või tema poolt
määratud tüürimees ja selles peavad olema läbi töötatud
planeeritava sõidurajooni navigatsioonilised ohud, hoovused,
iseärasused, kohalikud reeglid jne.
Vastutuse jaotamineKapten võtab vastu otsuse reisi planeerimisest ja annab vastava käsu
reisi marsruudi ja planeerimise mahu kohta tüürimehele; kontrollib
reisi ettevalmistuse vastavust antud juhendile ja instruktsioonidele,
informeerib tüürimehi planeeritava reisi marsruudist, valmistab ette ja
viib läbi reisi analüüsi, kui kapteni otsusega pole ette nähtud teisiti.
Tüürimees viib läbi reisi ettevalmistuse vastavalt antud juhendile ja
kapteni instruktsioonidele, kannab vanemtüürimehele ette
ettevalmistuse lõpetamise kohta, esitab vajalikud materjalid reisi
analüüsimiseks.
Reisiplaani koostamise põhietapid
Sõidurajooni tundma õppimine
Seda alustatakse navigatsioonilise ja
hüdrometeoroloogilise informatsiooni kogumisest:
navigatsioonilised tingimused – tee pikkus, rannajoone
liigestatus, meresõidu ohud, väiksemaid sügavused,
meresõiduks suletud ja keelatud rajoonid, tuletornid, tulelaevad
ja muud meremärgid, sihtsadamasse sissesõidu tingimused,
ankrukohad, sadamareeglid.
Hüdrometeoroloogilised tingimused – nähtavus, udud,
temperatuurid, valitsevad tuuled,
tormid , tuulevaikus, veealused
ja veepealsed ohud, hoovused, nende iseloom ja tingimused.
Kuna meresõidu tingimused pidevalt muutuvad tuleb
korraldada navigatsiooniliste ja hüdrometeoroloogiliste
teadete ja hoiatuste vastuvõtt.
Marsruudi valik
Marsruut tuleb valida
selliselt , et läbitav vahemaa oleks
optimaalne ja väldiks laeva sattumist madalikule ja
kokkupõrget teise
laevaga . Oma teel läbiv laev
rannalähedase rajooni, kus meresõidu- ja kokkupõrke oht on
suur ja avamererajooni, kus peamiseks ohuks on
meteoroloogilised tegurid –
torm , vesipüks,
troopiline tsüklon.
Lootsiraamatutes antakse peakursid või juhised peakursside
valikuks sõiduks antud rajoonis. Juhiste järgi kantakse
peakursid üldkaardile. Üldkaardile kantud kursi järgi on
võimalik täpsustada marsruudipikkust ja selle läbimiseks
vajatavat aega, samuti välja arvutada ligikaudne ohtlike
rajoonide läbimise aeg. Üksikasjalik ja täpne kursside maha
märkimine toimub suure kaardimõõduga sõidukaartidel (1:1
00 000 – 1:2 00 000). Üldkaardilt kantakse peakursid
sõidukaardile, kuna üldkaartidel puuduvad elemendid –
läbisõit kitsustest ja eriti ohtlikest rajoonidest – kantakse
sõidukaartidele ja plaanidele.
Lootsiraamatutes antakse kõigi objektide kirjeldus ühe ja sama skeemi järgi:
asukoht
üldine iseloomustus
üksikute detailide kirjeldus - navigatsioonilised juhisedNavigatsioonilised juhised antakse käskivas kõnevi sis ja
nad käsitlevad meresõitu pi ratud nähtavuse tingimustes
radari kasutamisega, antakse objektide kujutise
muutumine radari
ekraanil sõltuvalt laeva asukoha
muutumisest. Juhised meresõiduks koostatakse
kontrol itud andmete alusel. Kontrol itud andmete
puudumisel antakse lootsiraamatus näpunäited antud
rajoonis sõitmiseks.
Kasutades juhiseid ja näpunäiteid kantakse kaardile
kursside muutumise alg- ja lõpp-punktid, nende peilingud
ja kaugused meremärkidest, tähtsamate meremärkide
traaversite
momendid . Kaardile kantakse
hariliku pli atsiga ohtliku peilingud ja kaugused.
Pärast kursside kaartidele mahamärkimist tuleb lahendada veel mõned ohutu meresõiduga
seotud ülesanded: määrata laeva li kumise ohutu kiirus sõltuvalt ohtude
lähedusest ja laeva manööverduselementidest ja
süvise suurenemisest väikese sügavusega kohtades.
määrata marsruudi kohad, kus on võimalik sõita
kiiruse pi ranguga öösel või kitsustes
määrata rajoonid, kus tuleb eriti täpselt määrata laeva
asukohta ja kanda kaardile samajoonte võrk asukoha
määramise kiirendamiseks
valida ja kanda kaardile meremärgid, mis tagavad
asukoha määramise suurima täpsuse.
Reisiplaani
teostamine Sõltuvalt sõidurajoonist võib reisi jaotada:
rannalähedane sõit
ookeani sõit
Kaardid Kaartide
kataloogi abil valitakse välja kõik vajalikud kaardid ja asetatakse
vajalikku järjekorda. Kõik kaardid tuleb korrigeerida viimast “Teated
meremeestele” järgi. Kui reisi jooksul saadakse uut navigatsioonilist
informatsiooni (navigatsioonilised hoiatused), tuleb vastav
korrektsioon kaardile kanda.
Keelatud sügavused (no go areas )Sügavused, kuhu laev oma süvise tõttu ei tohi minna, märgistatakse värvilise
(harilikult värvilise samasügavusjoonega). Ka vetes, kus loodete tõttu vee
sügavus muutub, märgistatakse keelatud sügavused samal moel. Sügavust
täpsustatakse kui laev jõuab antud rajooni.
Ohutus piirid (margins of safety )Et tüürimehel oleks lihtsam määrata, kas laev ei asu mõnele ohule või keelatud
sügavusele liiga lähedal, kantakse kaardile ohutus piirid, mis on vaba
meresõidu ohtudest. Ohutuspiiride
kandmisel kaardile võetakse arvesse:
laeva mõõtmed
koha määramise täpsus
loode hoovused
laeva manööverdus omadused
Harilikult loetakse ohutusalaks sügavused, mis on suuremad kui laeva süvis +
20%.
KursidEelkõige kantakse kursid lähtesadamast sihtsadamani
väikemastaabilistele kaartidele ja sealt suuremastaabilistele
kaartidele. Kursijoonele
kirjutatakse tõeline kurss.
Kompassikursid arvutatakse sõltuvalt hoovustest ja tuulest enne
jõudmist vastavasse rajooni. Pöörde punktid kantakse ühelt kaardid
teisele peilingu ja kauguse abil.
Kaugus ohtudeni ( distance off)Ohtudest möödumise kauguse määramiseks pole eraldi reegleid, kuid
tema määramisel võetakse arvesse:
laeva süvis sügavuste suhtes
ilmastiku tingimusi loodehoovuste suunda ja kiirust
liikumistihedust
Rajoonides, kus sügavus suureneb ki resti loetakse normaalseks
ohtudest möödumise kauguseks 1-2 miili.
Laeva süvisega 3-6 meetrit peavad hoiduma väljapoole 10 m
samasügavusjoont, laevad süvisega 6-10 m väljaspool 20 m
samasügavusjoont.
Pöördepunktid (wheel over)Väiksemastaabilistel kaartidel langeb pöördepunkt kokku kursimuutuse
algusega. Suuremastaabilistel kaartidel tuleb aga alustada pööret
uuele kursile enne pöörde punkti jõudmist. Kursimuutuse alguse
punktid määratakse kauguse või peilinguga hästinähtavast
meremärgist.
Need kaugused ja peilingud kantakse kaardile. Laeva
liikumis jälgimiseks on kasulik kaardile kanda ka tuletornide silmapi rile
ilmumine ja kadumine ja traaversimomendi. Lisaks
pöördepunktidele kantakse kaardile ki ruse muutmise, lootsi pardale
võtmise, ankru ja muud kohad.
Reisi katkestamine (aborting)Ka täiuslikult planeeritud reisil võib juhtuda, et reisi ei saa enam jätkata.
Reisi katkestamise põhjuseks võib ol a:
masinarikke
juhtimissüsteemide
rike vedurlaevade või kaide puudumine
ohtlik olukord sadamas
olukord, kus reisi jätkamine loetakse ohtlikuks
Reisi katkestamise punkt peab olema kantud kaardile.
HädaolukordPiiratud sügavusega vetes võib laev sattuda olukorda, kus reisi
katkestamine pole võimalik ja tuleb reisi jätkata. Sellised kohad
peavad olema kaardile kantud ja samuti tegevus hädaolukorras,
milleks võib olla:
teine marsruut
ankurdamine sildumine kai äärde
Esmased ja teised kohamääramise vahendidReisiplaanis tuleb ära näidata, millised asukoha määramise vahendid,
sõltuvalt sõidurajoonist loetakse esmasteks ja mil
ised teiseks.
Kahtlemata on ookeanil sõidul esmaseks asukoha määramise
vahendis GPS, teised Loran C ja astronoomilised vaatlused. Sõidul
ranna lähedal võib esmaseks
vahendiks samuti ol a GPS, teiseks
aga raadiolokaator või visuaalsed peilingud. Ainult GPS asukohaga
pi rdumine pole õige, sest vastavalt vahipidamise korraldamise
alustele peab tüürimees määrama laeva asukohta erinevate
meetodite abil.
Lähenemine rannaleRannale lähenemisel peab vahitüürimees kaardilt määrama esimesena
nähtavale ilmuva tuletorni ja tema tule karakteristiku ning leidma ta
teiste kaldatulede seast.
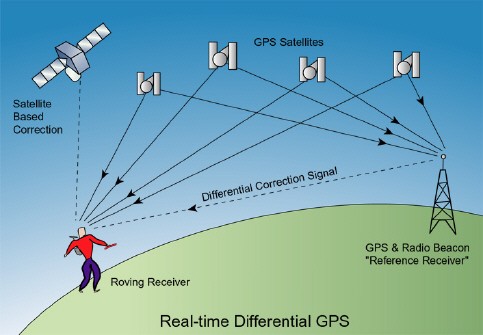
Elektroonilised navigatsiooni-
vahendid
GPS
GPS (
pikemalt NAVSTAR GPS on akronüüm sõnadest
NAVigation System with Time And Ranging Global Positioning System) on
ülemaailmne asukohamääramise süsteem, mis loodi Ameerika
Ühendri kide Kaitseministeeriumi poolt. Hetkel ainus
täisfunktsionaalne
GNSS .
GPS seadmed kasutavad asukoha määramiseks vähemalt 24
satel i ti (“GPS tähtkuju”), mis ti rlevad ümber Maa 20 200 km
kõrgusel. Sel ise kaugusega on tagatud orbi tide stabi lsus, täpsus ja
täpsustus – ei sega maa atmosfäär.
Satelliitide omavaheline asend on arvestatud nii, et igal ajahetkel
(24h) peaaegu igas maakera punktis oleks rohkem kui 15° kõrgusel
horisondist nähtaval vähemalt 4 satel i ti, mis on pi sav täpseks
mõõtmiseks. Asukoha määramise täpsus on mõni meeter.
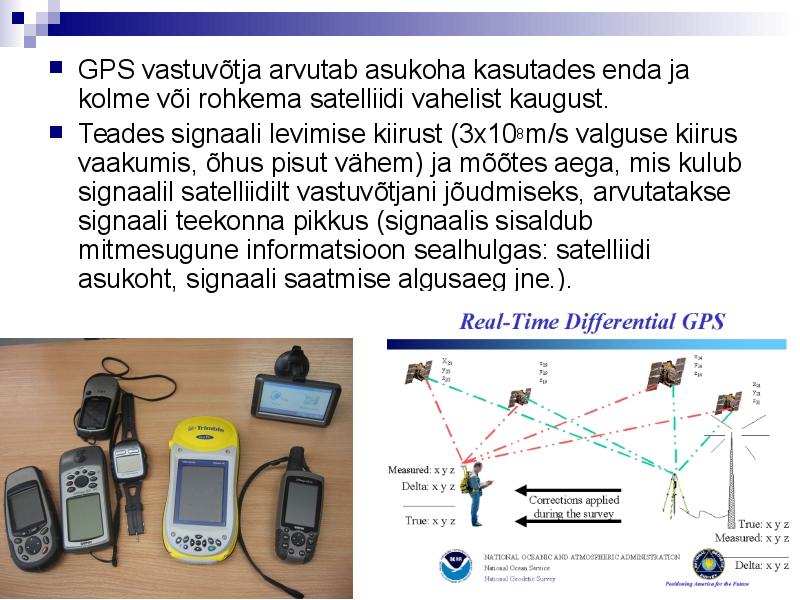
GPS
vastuvõtja arvutab asukoha kasutades enda ja
kolme või rohkema satel i di vahelist kaugust.
Teades signaali levimise kiirust (3x108m/s valguse kiirus
vaakumis , õhus pisut vähem) ja mõõtes aega, mis kulub
signaalil satel i dilt vastuvõtjani jõudmiseks, arvutatakse
signaali teekonna pikkus (signaalis sisaldub
mitmesugune informatsioon sealhulgas: satel i di
asukoht, signaali
saatmise algusaeg jne.).
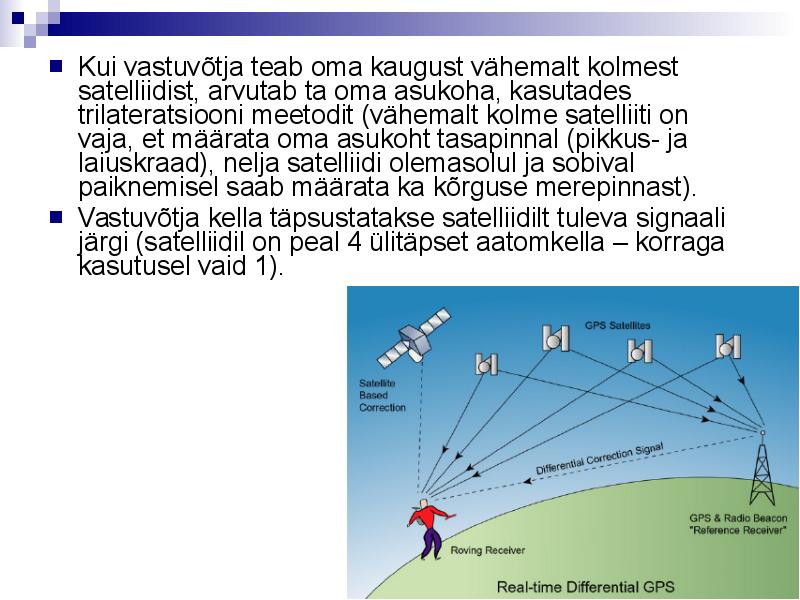
Kui vastuvõtja teab oma kaugust vähemalt kolmest
satel i dist, arvutab ta oma asukoha, kasutades
trilateratsiooni meetodit (vähemalt kolme satel i ti on
vaja, et määrata oma asukoht tasapinnal (pikkus- ja
laiuskraad), nelja satel i di
olemasolul ja sobival
paiknemisel saab määrata ka kõrguse merepinnast).
Vastuvõtja kel a täpsustatakse satel i dilt tuleva signaali
järgi (satel i dil on peal 4 ülitäpset aatomkel a – korraga
kasutusel vaid 1).
Süsteemi
segmentatsioon NAVSTAR GPS koosneb kolmest osast. Need on kosmose
segment (
space segment (SS)), kontrollsegment (
control segment (CS)) ja kasutaja segment (
user segment (US)).
Kosmose segmentKosmose segment koosneb orbiidil olevatest GPS satelliitidest. GPS süsteem on üles
ehitatud 24. satelliidile mis on võrdselt jaotatud kuuele orbiidile. Orbiidi kese paikneb
maakera keskpunktis. Kõik kuus orbiiti on ekvaatori suhtes umbes 55° nurga all.
Orbiitide omavaheline nurk on 60°. Orbiidi kõrguseks on 20 200 km ja orbiidi
raadiuseks 26 600 km. Kõik
satelliidid teevad kaks tiiru umber maakera ühe
sideerilise päeva jooksul.
Alates 2007. aasta septembrist on süsteemis kasutusel 31 satelliiti.
Kontrollsegment Toimub satelliitide aatomi
kellade sünkroniseerimine ning ajatabelite uuendamine
(4 jaama USA Kaitsemin.-i
järelvalve all); ajatabelid on analoogsed
arvutustabelitele, mida kasutatakse astronoomias ja navigatsioonis taevakehade
järgi asukoha määramiseks
Kasutaja segment Siia kuulub kasutaja poolt soetatud GPS vastuvõtja ning selle töötamise
võimalikkus;
Töötab sagedusel 1100-1500 MHz
Lisaks eraldiseisvale väikesemõõdulistele ja kergekaalulistele käsiseadmele, on
GPS vastuvõtja-funktsioon juba olemas mob.telefonides, fotoaparaatides.
Navi .,
seire , kaartistamine, aja seire
RADAR
RAdio Detection And Ranging Elektromagneetilised mikrolaineid peegelduvad
kõikidelt suurematelt aatomi tiheduse muutustelt,
mis on aine ja teda ümbritseva keskonna vahel.
See tähendab, et tahke keha vaakumis või õhus
peegeldab radari raadiolaineid.
Eriti hästi on seda näha elektrit juhtivate
materjalide puhul, nagu näiteks metallid ja
karbonfiiber ehk süsinik-kiud, mis teeb radari
väga
sobivaks lennukite ja laevade jälgimiseks.
Radarile nähtamatuks jäävad materjalid
sisaldavad resistiivseid ja magnetilisi aineid. Neid
kasutatakse sõjanduses, et
peita näiteks
lennukeid ja laevu radari vaatevälja eest
Kauguse mõõtmine radariga
Radariga saab mõõta ka kaugust. Selleks on kaks erinevat võimalust, mõlema
variandi puhul
saadetakse signaal radarist välja ning hiljem püütakse see
sama signaal uuesti kinni.
Radar
vaheldumisi kas
saadab või võtab vastu. Sellest tulenevalt on väga
raske või isegi võimatu teha sellist radarit, mis oleks hea nii pikkade kui ka
lühikeste vahemaade mõõtmiseks, sest signaali võnge on erinev. Seega iga
radar kasutab kindlat tüüpi signaali.
Pikamaa -radarid kasutavad pikemaid võnkeid ja
pikki viivitusi nende vahel, aga
lühimaa-radarid kasutavad väiksemaid võnkeid ja väiksemat viivitust nende
vahel.
Pulseeriva radari korral saadetakse signaal välja ja mõõdetakse aega, millal
signaal tagasi jõuab, siis aga korratakse tegevust. Saadud aja ja
raadiolaine levimise kiiruse järgi saadakse kätte
teepikkus , mille raadiolaine läbis. Kuna
raadiolaine läbis kaks „otsa” siis tuleb see jagada kahega ja kaugus ongi
teada.
Sagedusmodulatsiooni radari puhul saadetakse signaal välja kogu aeg ja
signaali võetakse vastu samuti kogu aeg. Signaali sagedust aga
moduleeritakse ehk siis muudetakse teda mingil kindlal viisil ja kiirusel.
Hiljem, kui signaal tagasi vastuvõtjasse jõuab, on võimalik kindlaks teha, kui
palju on signaal sagedus muutunud, selle kaudu ka aeg, mis kulus
liikumisele ja sealt on juba vahemaa või teepikkuse arvutamine lihtne.
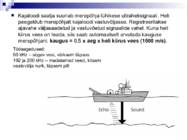
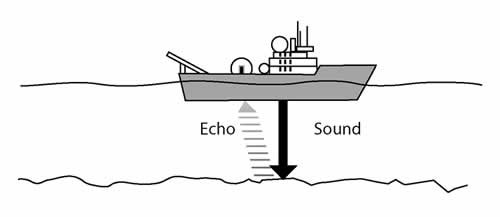
Kajalood
Ultraheli kasutatamine põhineb sageli
kajameetodil. Ultraheli peegeldub teele jäävalt
takistuselt. Kui püüda kinni peegeldunud
helisignaal ning registreerida
ajavahemik helisignaali väljasaatmise ja vastuvõtmise vahel, saab arvutada takistuse kauguse.
Ultraheli võimaldab
nahkhiirtel pimeduses orienteeruda.
Nahkhiir tekitab ultraheli
sagedusega helisignaale ja võtab kõrvadega vastu ümbritsevatelt objektidelt
peegeldunud heli. Nii saab ta teada takistuste asukohad ning suudab vältida
kokkupõrget.
Ultraheli kasutatakse laialdaselt
meditsiinis.
Organismis on erinevad
koed , mille tihedused erinevad üksteisest. Kuna ultraheli
peegeldub osaliselt kudede lahutuspinnalt, siis võimaldab see määrata erinevate
kudede asendit (
ultrahelidiagnostika). Lisaks diagnostikale kasutatakse ultraheli ka
teraapias. Ultraheli
neeldumine kudedes põhjustab kudede soojenemist. Ultraheliga
saab
soojendada ka
luid ja liigeseid. Kui ultraheli intensiivsus on liiga suur, siis võib
see põhjustada kudede hävimist.
Tööstuses kasutatakse ultraheli esemete või detailide defektide kindlakstegemisel.
Ultraheli peegeldub tagasi uuritava eseme pinnalt. Kui
esemel on pragusid või
konarusi, siis on võimalik kajameetodil määrata defektide asukohta ja sügavust.
Laevanduses kasutatakse ultraheli kalaparvede, al veelaevade,
jäämägede ja mitmesuguste teiste veealuste objektide asukoha
määramiseks. Ultraheliga saab uurida ka merepõhja sügavust ja
põhja reljeefi. Vastavat
aparaati nimetatakse
kajaloeks (sõnast:
kajalood)
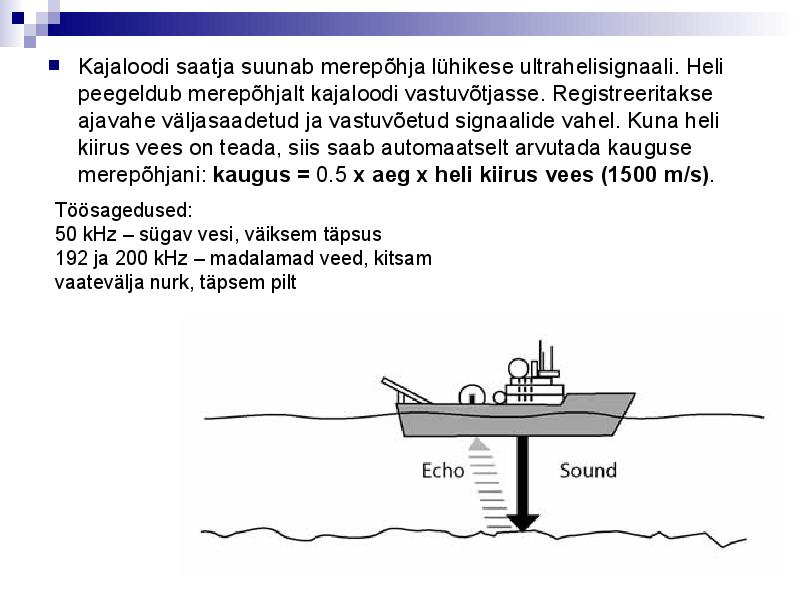
Kajaloodi
saatja suunab merepõhja lühikese ultrahelisignaali. Heli
peegeldub merepõhjalt kajaloodi vastuvõtjasse. Registreeritakse
ajavahe väljasaadetud ja vastuvõetud signaalide vahel. Kuna heli
ki rus vees on teada, siis saab automaatselt arvutada kauguse
merepõhjani:
kaugus = 0.5
x aeg x heli kiirus vees (1500 m/s).
Töösagedused:
50 kHz – sügav vesi, väiksem täpsus
192 ja 200 kHz – madalamad veed, kitsam
vaatevälja nurk, täpsem pilt
OLULISIM
Pikkusühik merel on
meremiil = 1852 m
(s.o. meridiaani kaareminuti pikkus)
ja
kaabeltau = 1/10 meremiili = 185,2 m Kiirusühikuks merel on sõlm = 1 nm/h =
1 meremi l/tunnis =
0,514 m/s(1 nautical mile per
hour )
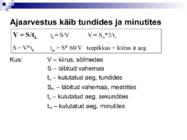
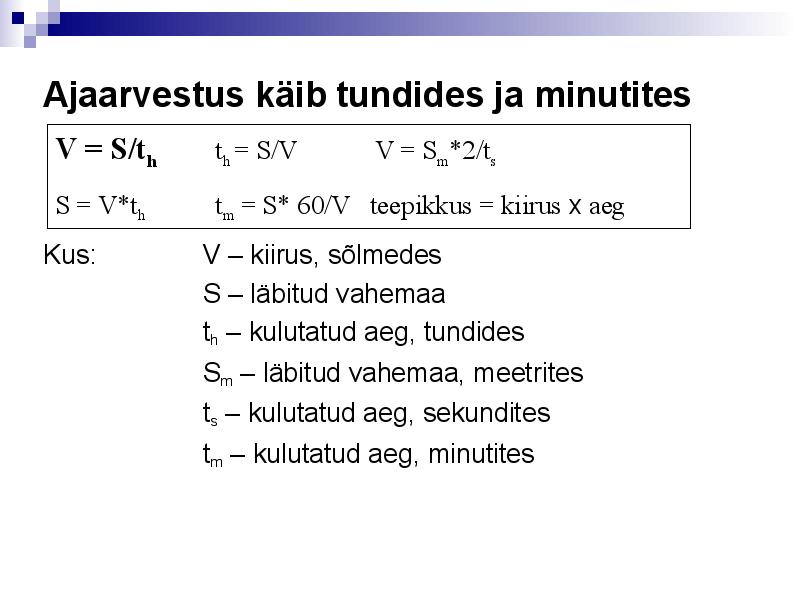
Ajaarvestus käib tundides ja minutitesV = S/t t = S/V
V = S *2/t
hh
m
s
S = V*t
t = S* 60/V teepikkus = kiirus x aeg
h
m
Kus:
V – kiirus, sõlmedes
S – läbitud vahemaa
th – kulutatud aeg, tundides
Sm – läbitud vahemaa, meetrites
ts – kulutatud aeg, sekundites
tm – kulutatud aeg, minutites
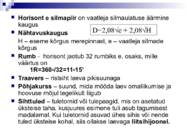
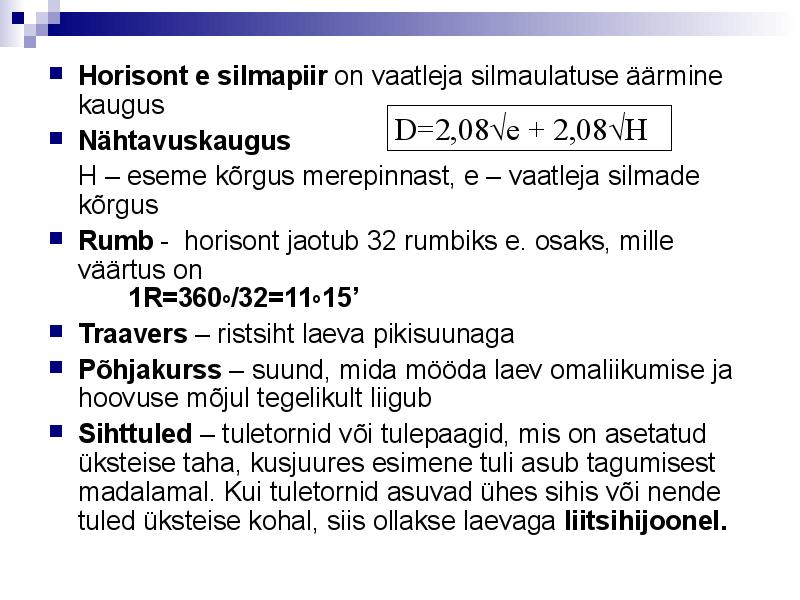
Horisont e silmapiir on vaatleja silmaulatuse äärmine
kaugus
NähtavuskaugusD=2,08√e + 2,08√H
H – eseme kõrgus merepinnast, e – vaatleja silmade
kõrgus
Rumb - horisont jaotub 32 rumbiks e. osaks, mil e
väärtus on
1R=360o/32=11o15’
Traavers – ristsiht laeva pikisuunaga
Põhjakurss – suund, mida mööda laev omali kumise ja
hoovuse mõjul tegelikult li gub
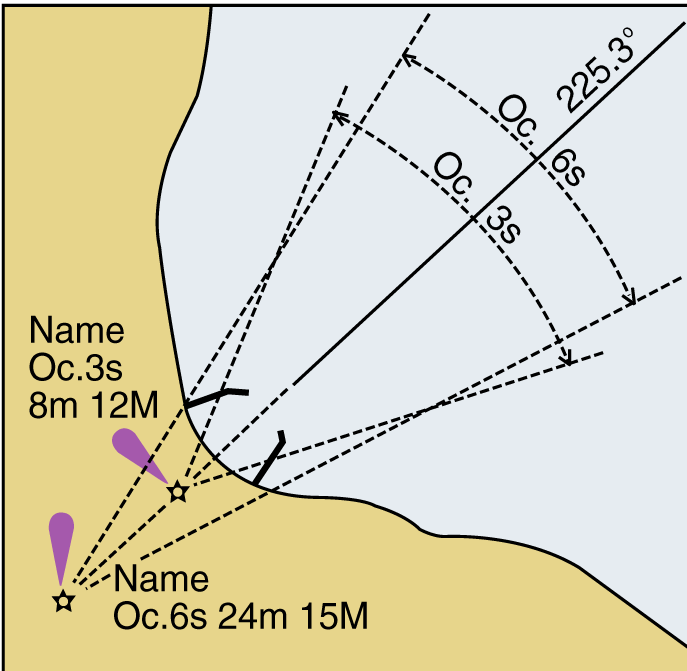
Sihttuled – tuletornid või tulepaagid, mis on asetatud
üksteise taha, kusjuures esimene tuli asub tagumisest
madalamal. Kui tuletornid asuvad ühes sihis või nende
tuled üksteise kohal, siis ol akse laevaga
liitsihijoonel.
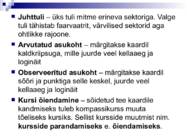
Juhttuli – üks tuli mitme erineva sektoriga. Valge
tuli tähistab faarvaatrit, värvilised sektorid aga
ohtlikke rajoone.
Arvutatud asukoht – märgitakse kaardil
kaldkriipsuga, mille juurde veel kellaaeg ja
loginäit
Observeeritud asukoht – märgitakse kaardil
sõõri ja
punktiga selle keskel, juurde veel
kellaaeg ja loginäit
Kursi õiendamine – sõidetud tee kaardile
kandmiseks tuleb kompassikurss muuta
tõeliseks kursiks. Sellist kursside muutmist nim.
kursside parandamiseks e.
õiendamiseks.
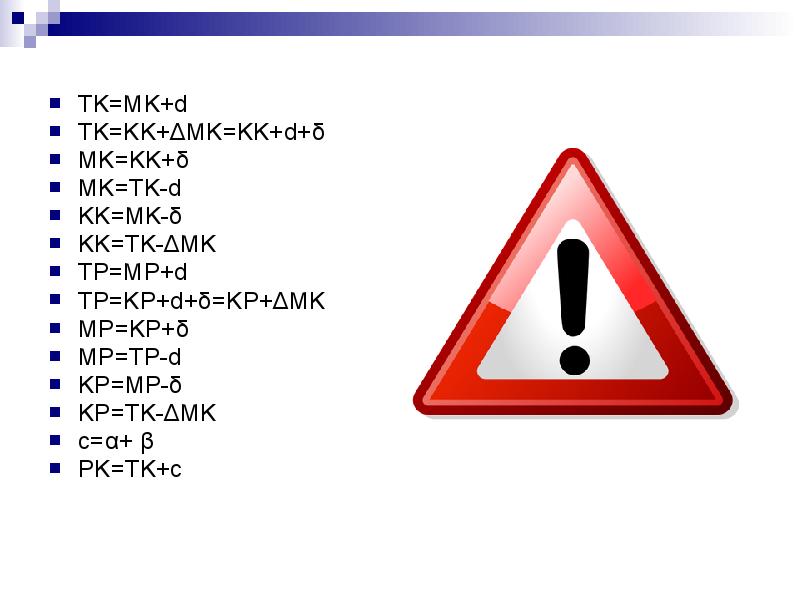
TK=MK+d
TK=KK+ΔMK=KK+d+δ
MK=KK+δ
MK=TK-d
KK=MK-δ
KK=TK-ΔMK
TP=MP+d
TP=KP+d+δ=KP+ΔMK
MP=KP+δ
MP=TP-d
KP=MP-δ
KP=TK-ΔMK
c=α+ β
PK=TK+c
Document Outline
- Väikelaevajuhid: navigatsioon
- Slide 2
- Slide 3
- Maakera põhipunktid ja -ringid
- Slide 5
- Geograafilised koordinaadid
- Maakera põhijooned ja -tasandid
- Horisondi jagamise süsteemid
- Slide 9
- Slide 10
- Tõeline kurss, tõeline peiling ja kursinurk
- Slide 12
- Slide 13
- Tõeline vastaspeiling, traavers
- Slide 15
- Maa magnetism
- Magnetkalle
- Slide 18
- Variatsiooni tähistamine ja leidmine merekaartidelt
- Slide 20
- Slide 21
- Slide 22
- Magnetkurss, magnetpeiling
- Magnetkompass
- Magnetkompassi deviatsioon
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Kiiruse ja kauguse ühikud merel, läbitud tee määramine, logid
- Slide 32
- Logiõiend
- Logitegur
- Näiva horisondi kaugus
- Tuletorni nähtavuse kaugus
- MEREKAARDID
- Mõõtkava
- Mastaap
- Kartograafilised projektsioonid
- Merekaartidele esitatavad nõuded
- Merkaatori projektsioon
- Gnomooniline projektsioon
- Merkaatori projektsioon – lühim tee pole sirgjooneline
- Navigatsioonikaardid
- Slide 46
- Kaarditöö
- Kaarditööriistad
- Deviatsiooni määramine ja hävitamine
- Sügavuste mõõtmine, loodid
- Kajalood
- Laeva tee arvutamine
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Hoovuse elemendid
- Hoovuse arvestamine
- Hoovuse ja triivi üheaegne arvutus
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Visuaalseid kohamääramise viise
- Slide 67
- Slide 68
- Koha määramine kahe rõhtnurga järgi
- Koha määramine kolme peilingu järgi
- Koha määramine kahe peilingu abil
- Koha määramine kahe peilingu ja rõhtnurga järgi
- Koha määramine ristpeilingu järgi
- Koha määramine kahe ja kolme kauguse abil
- Koha määramine kauguse ja peilingu järgi
- Koha määramine peilingu ja sügavuse järgi
- Koha määramine peilingu ja vertikaalnurga abil
- Navigeerimise tüübid
- Meremärgid
- Meresõidu ohtude tähistamine
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
- Slide 86
- Slide 87
- Faarvaateri keskjoone märk
- Kardinaalmärgid
- Slide 90
- Tulede karakteristikud
- Slide 92
- Slide 93
- Slide 94
- Slide 95
- Slide 96
- Liitsiht
- Reisiplaneerimine
- Slide 99
- Slide 100
- Slide 101
- Slide 102
- Slide 103
- Slide 104
- Slide 105
- Slide 106
- Slide 107
- Slide 108
- Slide 109
- Reisiplaani koostamise põhietapid
- Slide 111
- Slide 112
- Slide 113
- Reisiplaani teostamine
- Slide 115
- Slide 116
- Slide 117
- Slide 118
- Elektroonilised navigatsiooni- vahendid
- Slide 120
- Slide 121
- Süsteemi segmentatsioon
- Slide 123
- Slide 124
- Slide 125
- Slide 126
- OLULISIM
- Slide 128
- Slide 129
- Slide 130
- Slide 131
- Slide 132
- Slide 133





















































































Kõik kommentaarid