1Maakera mõõtmed ja kuju, põhipunktid,-jooned, ringid, tasandid
Maa kujutab pooluste suunas veidi lapikut kera ja kannab nime geoid.
Sfäärilistest vormidest vastab geoidile kõige rohkem pöördellipsoid, millel on
kaks telge suur mida tähistatakse tähega a ja väike, mida tähistatakse tähega b.
Püstjoone lõikepunkte Maa pinnaga nimetatakse poolusteks. Suurringi, mis
jaotab Maa kaheks poolkeraks nimetatakse ekvaatoriks. Pooluseid ühendavaid
suurringe nimetatakse meridiaanideks ja ekvaatoriga paralleelseid väikeringe
paralleelideks
Paralleelid ja meridiaanid moodustavad geograafilise võrgu
.
Maakera põhijooned ja tasandid
Maa igas punktis võib määrata rippuva raskusega suuna, mida nimetakse
loodjooneks. Pikendades loodjoont ülespoole saame vaatleja lagipunkti (seniidi).
Jätkates loodjoont allapoole saame punkti nimega nadiir. Loodjoonega ristset,
vaatleja asukohta läbivat tasandit nimetatakse vaatleja horisondiks
Esimese vertikaali tasand
2.Geograafilised koordinaadid, laiuste vahe pikkuste vahe
Iga punkti kohta
maakeral võib määrata geograafiliste
koordinaatide -laiuse ja pikkuse vahendusel.
Geograafiliseks laiuseks, mida tähistatakse kreeka
tähega fii (φ) nimetatakse meridiaani kaart ekvaatorist
antud koha meridiaanini. Laiust mõõdetakse ekvaatorist
Vaatlejameridi
aanpoolus
Põhjapool
usu
Paralleel
Ekvaator
Lõunapool
us poolus
Tõelise meridiaani
tasand
Vaatleja horisont
W
S
Vaatleja meridiaan
N
E
põhja ja lõuna poole 0°-90°. ekvaatoril laiuskraad on
0°,pooluse 90°.
Geograafiliseks pikkuseks mida tähistatakse kreeka tähega lamda (λ),
nimetatakse ekvaatori kaart algmeridiaani ja antud koha meridiaani
vahel. Pikkust loetakse alg(Greewhich´i) meridiaanistida ja lääne pole 0-180°.
Teades mingi punkti geograafilist laiust ja pikkust, võime ta kaardile kanda või leida asukoha
kaardil.
Kahe punkti laiuste vaheks (Δ φ) või LV maakeral nimetatakse nende punktide
paralleelide vahelist lühimat meridiaani kaart. Laiuste vahe koos nimetusega
määratakse valemiga
LV =φ2- φ1
Ühel, põhja- või lõunapoolkeralasuva kahe erineva punkti laiuste vahe
määramiseks, juhul kui teise punkti laius on suurem esimese punkti laiusest,
lahutatakse suuremast laiusest väiksem ja lisatakse põhjapoolkeral nimetus N.
Kui aga teise punkti laius on väiksem esimese punkti laiusest, siis lisatakse S.
Lõuna poolkeral on LV nimetused vastupidised. Kui antud punktid asuvad eri
poolkeradel, siis on LV võrdne nende punktide laiuste summaga ja nimetuse
saame sihtpunkti järgi.
Mõned näited φ2 =61°38´N φ2 =41°38´N
- φ1 =39°23´N - φ1=46°29´N
LV= 22°15’N LV=04°51’ N
Kahe punkti pikkuste vaheks (PV) maakeral nimetatakse antud punktide
meridiaanide vahelist lühimat ekvaarori kaart. Pikkuste vahe arvutatakse
valemiga
PV = λ2 - λ1
Ühe (ida või lääne) poolkeral asuva kahe erineva punkti pikkuste vahe
määramiseks juhul kui teise punkti pikkus on suurem esimese punkti pikkusest,
lahutakse suremas pikkusest väiksem ja lisatakse idapoolkeral nimetus E,
läänepoolkeral W. Kui aga yeise punkti pikkus on väiksem, saame vastupidised
PV nimetused. Kui kahe punkti nimetused on erinevad, siis pikkuste vahe
võrdub nende punktide pikkuste summaga, nimetus pannakse aga teise punkti
pikkuse järgi. Kui saadud summa ületab180°, lahutatakse tulemus 360° ja
pannakse vastupidine nimetus. Mõned näited 0nn
λ2 =48°25´E λ2 =158°25´E
λ1 = 31°12´E λ1 =118°27´W
PV= 17°13´ PV=276°52´E =83°08W
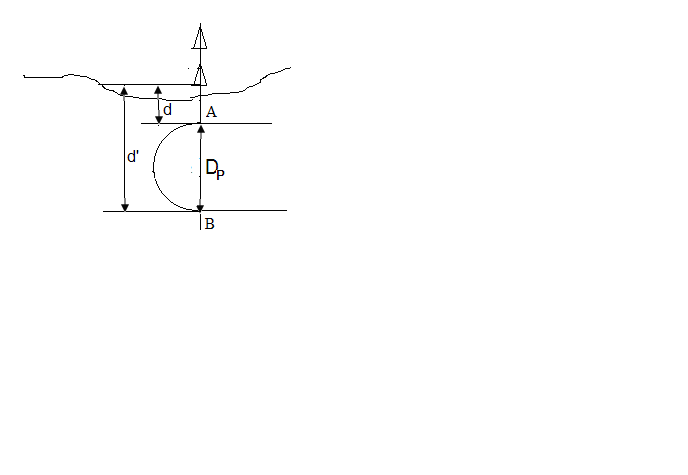
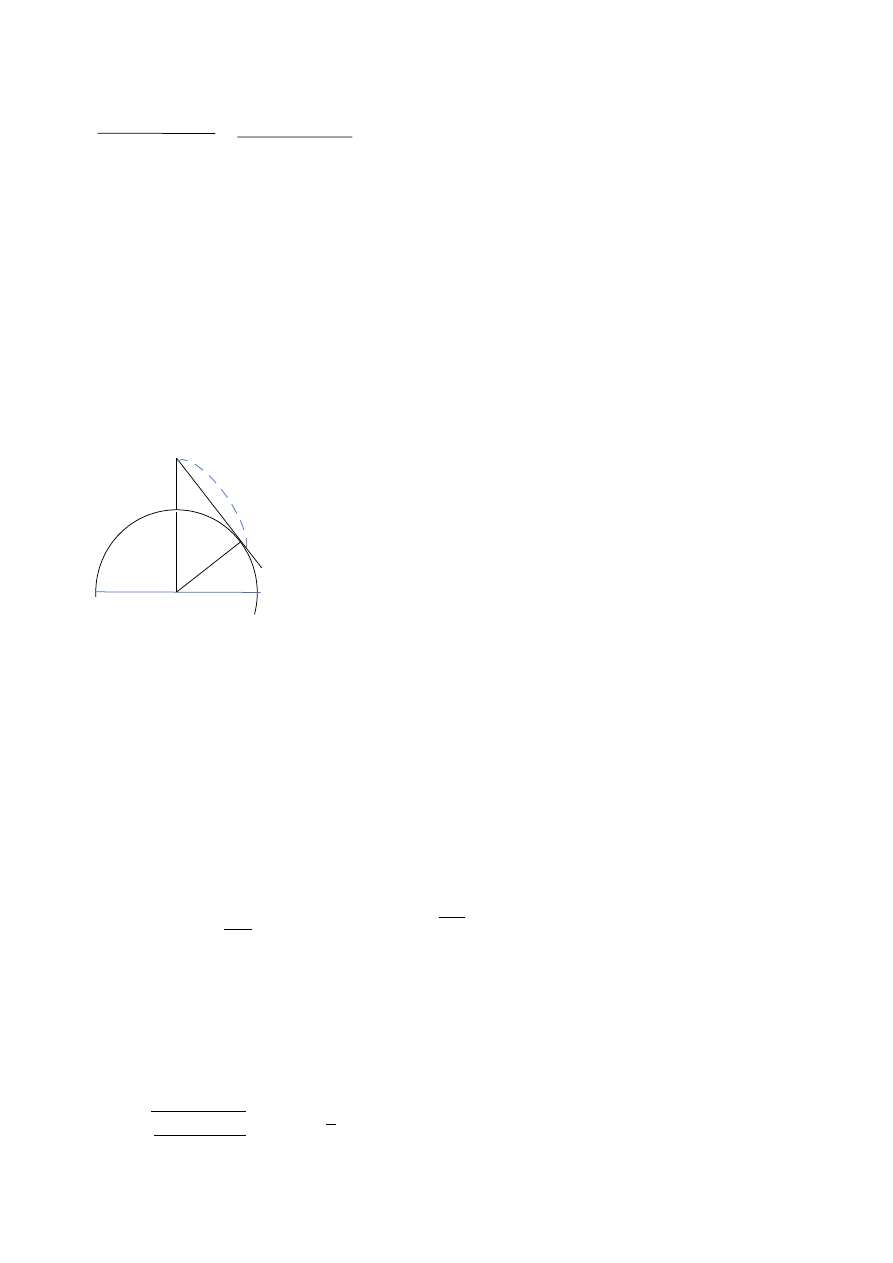
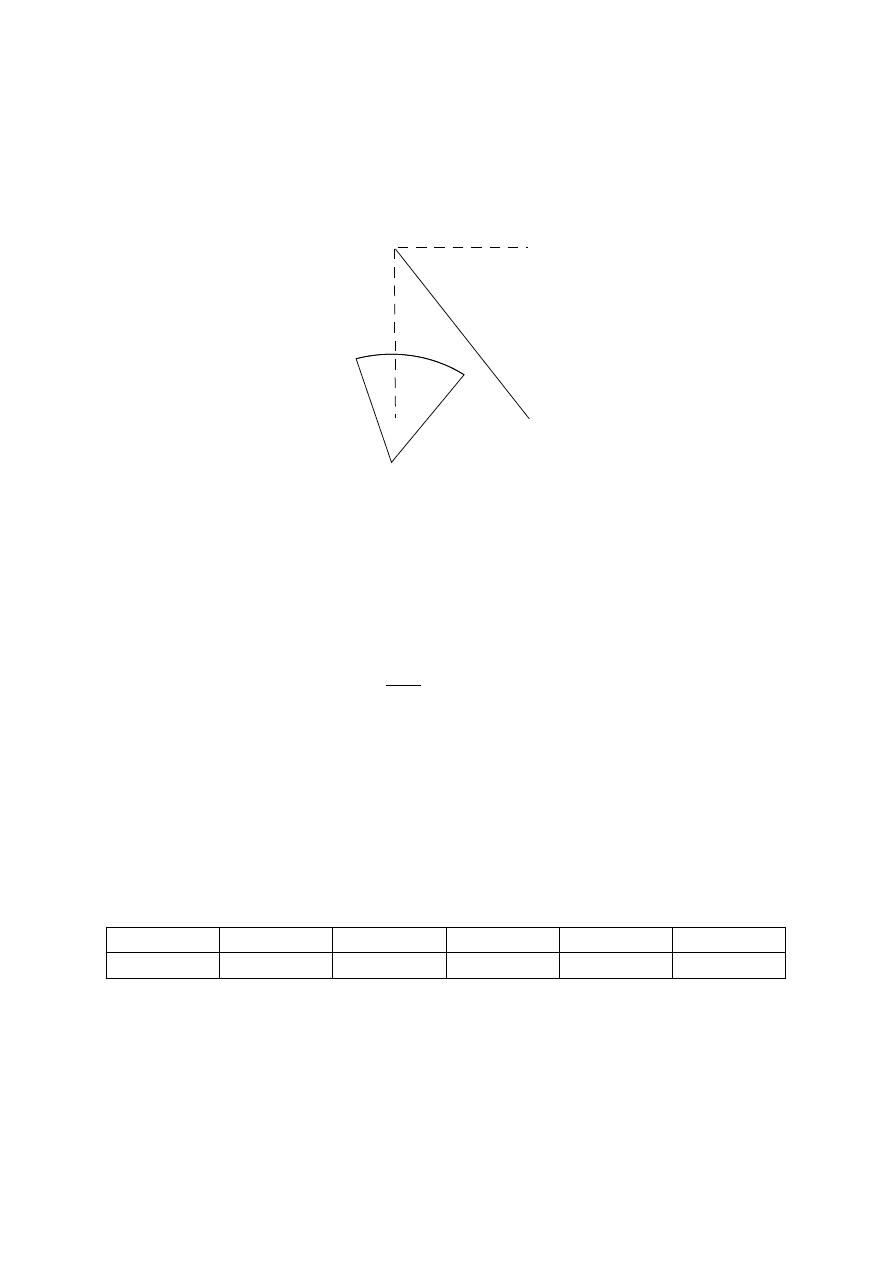
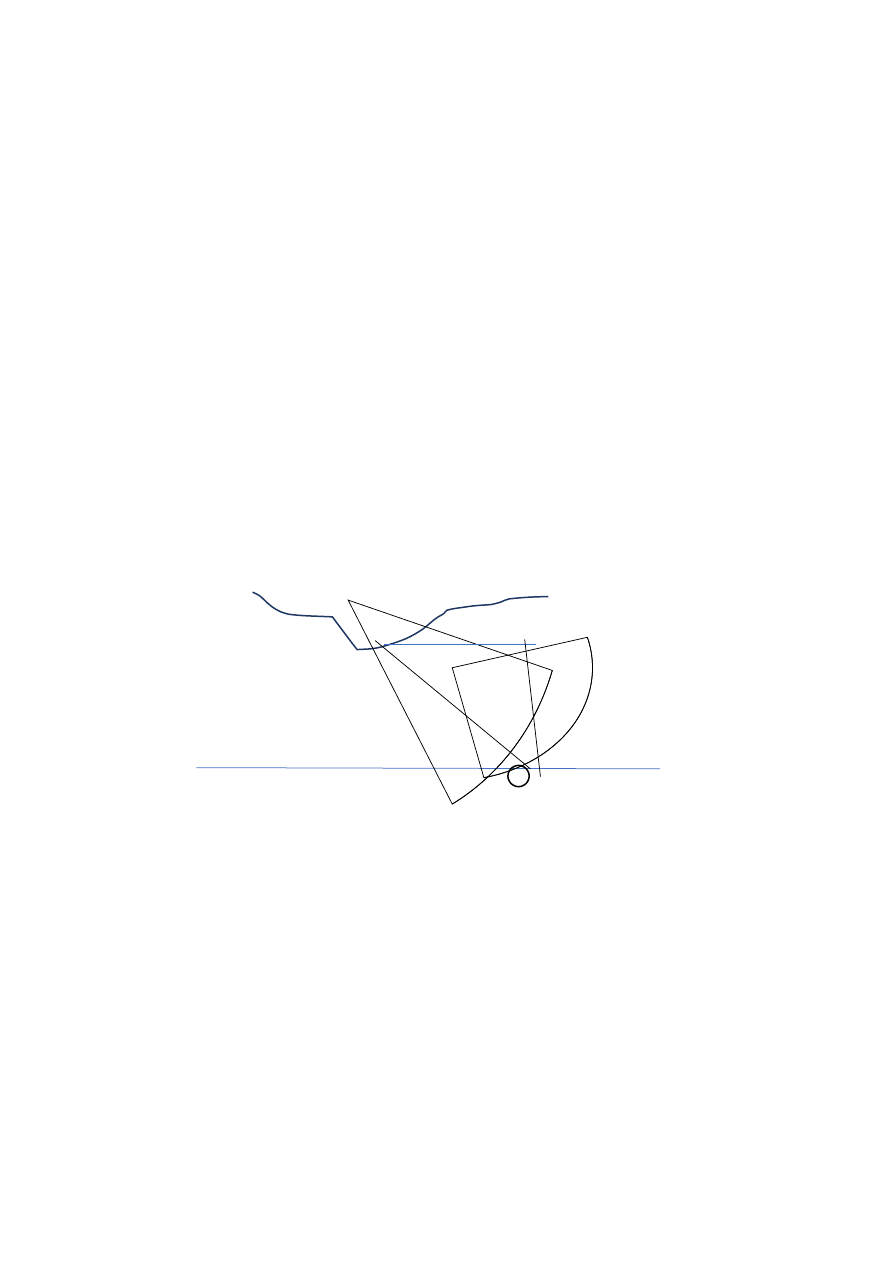
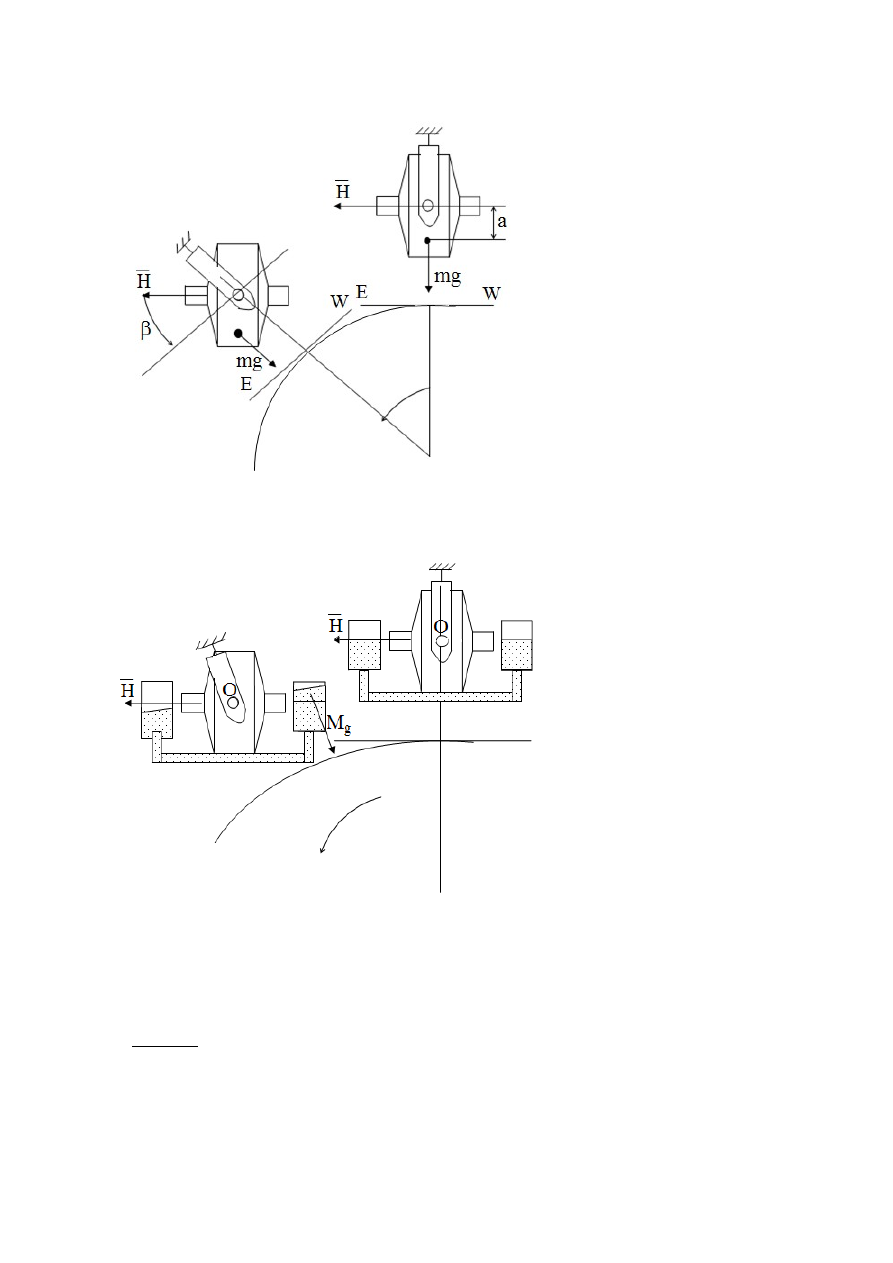
3.Näiva horisondi kaugus
Esemete nähtavuskaugus
Punktis A kõrgusel e Maa pinnast asuvale vaatlejale tundub, et ta seisab ringi
keskpunktis, mille äär puutub kokku taevavõlviga. Seda ringi nimetatakse
näivaks horisondiks ehk silmapiiriks. Vahemaad vaatlejast kuni silmapiirini
nimetatakse näiva horisondi kauguseks.
On ilmne, et mida kõrgemal asub vaatleja, seda suurem on ta kaugus
silmapiirini. Tuletame valemi silmapiiri kauguse arvutamiseks.
Kolmnurk OeDe on täisnurkne ja elementide vahel saame järgmised seosed
(
R+ e)
2
=
De
2
+
R
2
Avame sulud
R
2
+
2 ℜ+e
2
=
De
2
+
R
2
Koondame sarnased liikmed
2 ℜ+e
2
=
De
2
Toome võrrandi vasakus pooles 2Re sulgude ette
2 ℜ ¿
)=De
2 et e
2
2 ℜ
≈ 0
2ℜ=De
2 ehk De=√2ℜ
Saadud valemit sellisena kasutada ei saa. Silmapiiri kaugus peab olema
väljendatud meremiilides ja Maa raadius tuleb väljendada meremiilides. Võtame
Maa raasiuseks 3437,75 meremiili ja jagame silmakõrguse meremiili pikkusega
1852 meetrit
De=
√
2∗3437,75 e
1852
¿1,926❑√e
e
De
R
R
O
e
h
DTT
DL
DNäh
Kui arvesse võtta ka refraktsiooni 0,08 saame lõpliku valemi De=2,08 √e
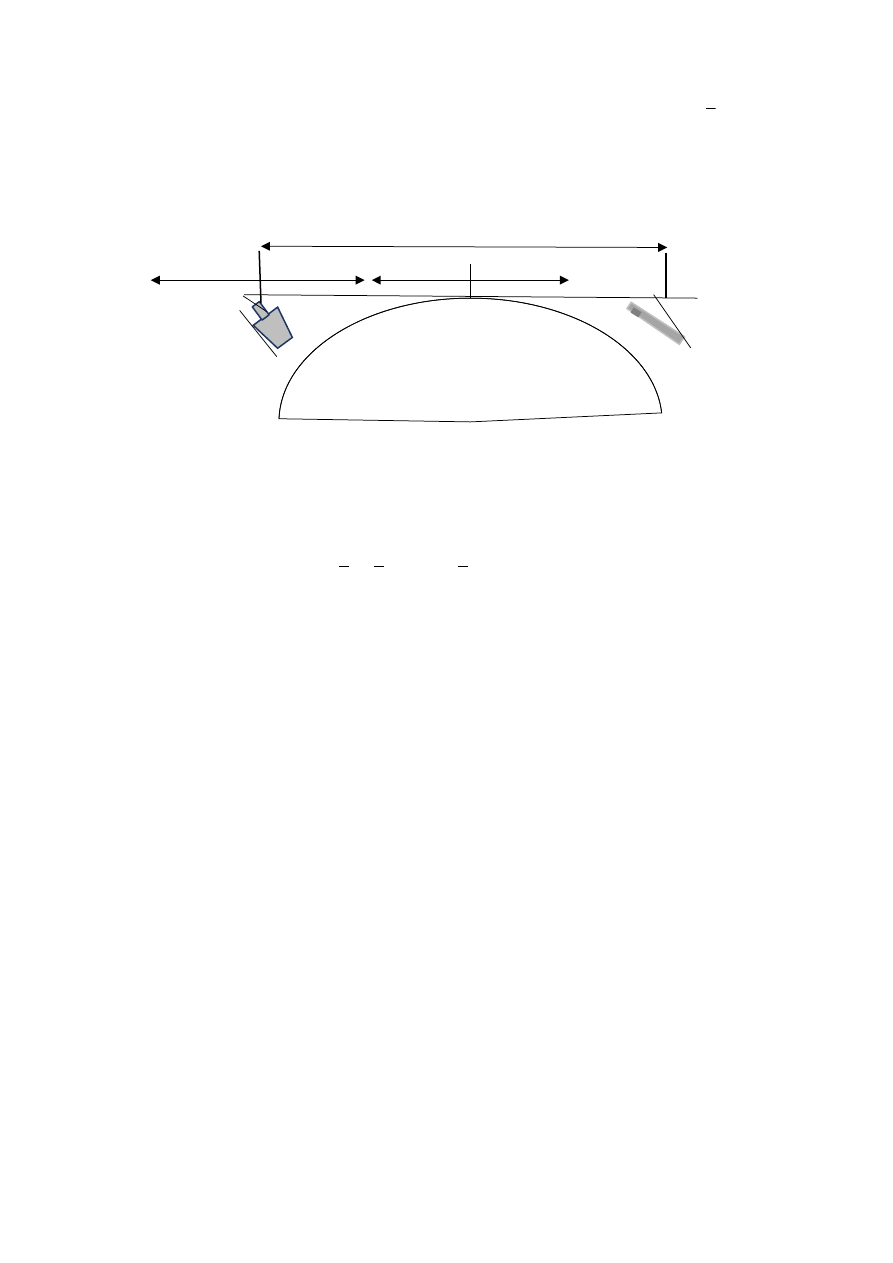
Eseme nähtavuskauguse all mõistetakse seda, kui kaugelt vaatleja silm näeb
selle eseme tippu näiva horisondi joonel.
Laeva vaatleja silma kõrgus on e, tuletorni kõrgus h, tuletorni nähtavuse kaugus
võrdub DL ja DTT summaga. Dnäh=DTT +DL=2,08¿ )
Tuletornide ja tulede nähtavus merekaartidel on toodud arvestatuna vaatleja
silmakõrguselt 5 meetrit. Kui vaatleja kõrgus erineb kasutada parandust
Δ Dk=Dn−Dkehk Δ Dk=2,08 (√e−√5) 0=2,08 √e−4,7 miili
Parandus on positiivne kui e>5 ja negatiivne kui e<5 m
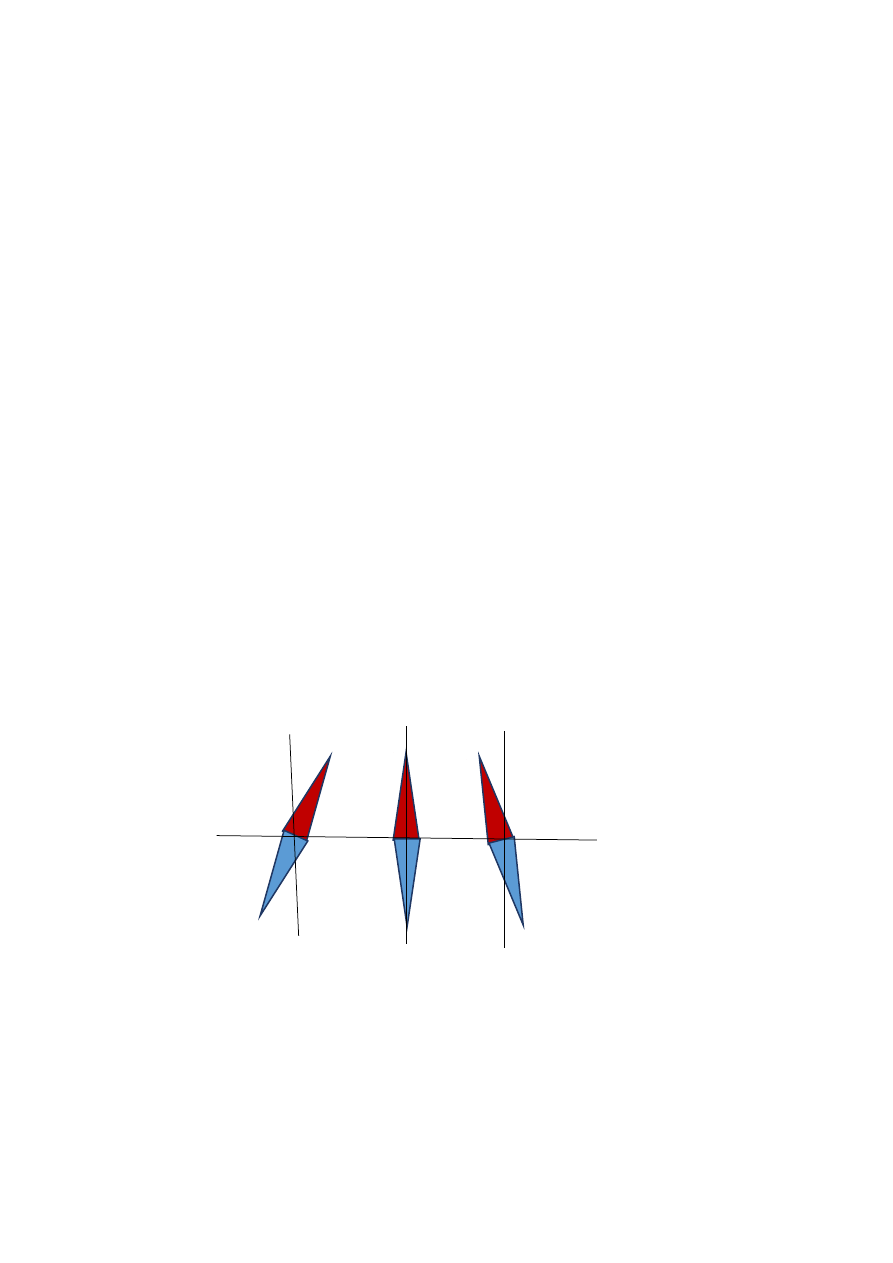
4.Horisondi jagamise süsteem. Kurss, peiling, kursinurk
Laevajuhtimises kasutatakse algsuunaks tõelise horisondi tasandil on tõeline
meridiaan. Igasuguse suuna maakera pinnal võib määrata tõelise (N-S suund) ja
antud eseme suunavahelise nurga kaudu Suundade määramiseks jaotakse
horisont võrdseteks osadeks. Tänapäeval jaotatakse horisont 360 võrdseks osaks.
1/360 osa nimetatakse kraadiks, sellist horisondi jaotust nimetatakse täisringi
süsteemiks. Kraade loetakse päripäeva nullist kuni 360°-ni. Kõigis põhilistes
suunamääramise instrumentides kasutatakse ringsüsteemi.
Veerandringi süsteem jagab iga neljandiku(veerandi) horisondist 90 kraadiks.
Kraade loetakse N-S suunast ida ja lääne poole. Veerandringi süsteemi kasutati
tuule suuna
näitamiseks.
Esimene horisondi jaotamise süsteem jaotas horisondi 32 rumbiks.
Ng
Ng
Ng
Laevajuhtimises arvestatakse kahesuguseid suundi: laeva liikumise ja süüdi
laeva ümbritsevatele esemetele. Kaardile kantud laeva pikitasandi suunda
nimetatakse kursiks. Tõeliseks kursiks nimetatakse nurka tõelise meridiaani ja
põhjapoose osa ja laeva pikitasandi vahel. Tõelist kurssi loetakse tõelise
meridiaani põhjapoolsest osast päripäeva kuni laeva vööripoolse pikitasandini.
Tõeliseks peilinguks nimetatakse tõelise meridiaani tasandi põhjasuuna ning
vaatleja silmaja objektiläbiva püsttasandi vahelist kahetahulist nurka, mida
mõõdetakse 0° 360°
Kursinurgaks KU nimetatakse laeva vööripoolse pikitasandi ning vaatleja silma
ja objektiläbiva püsttasandi vahelist nurka.
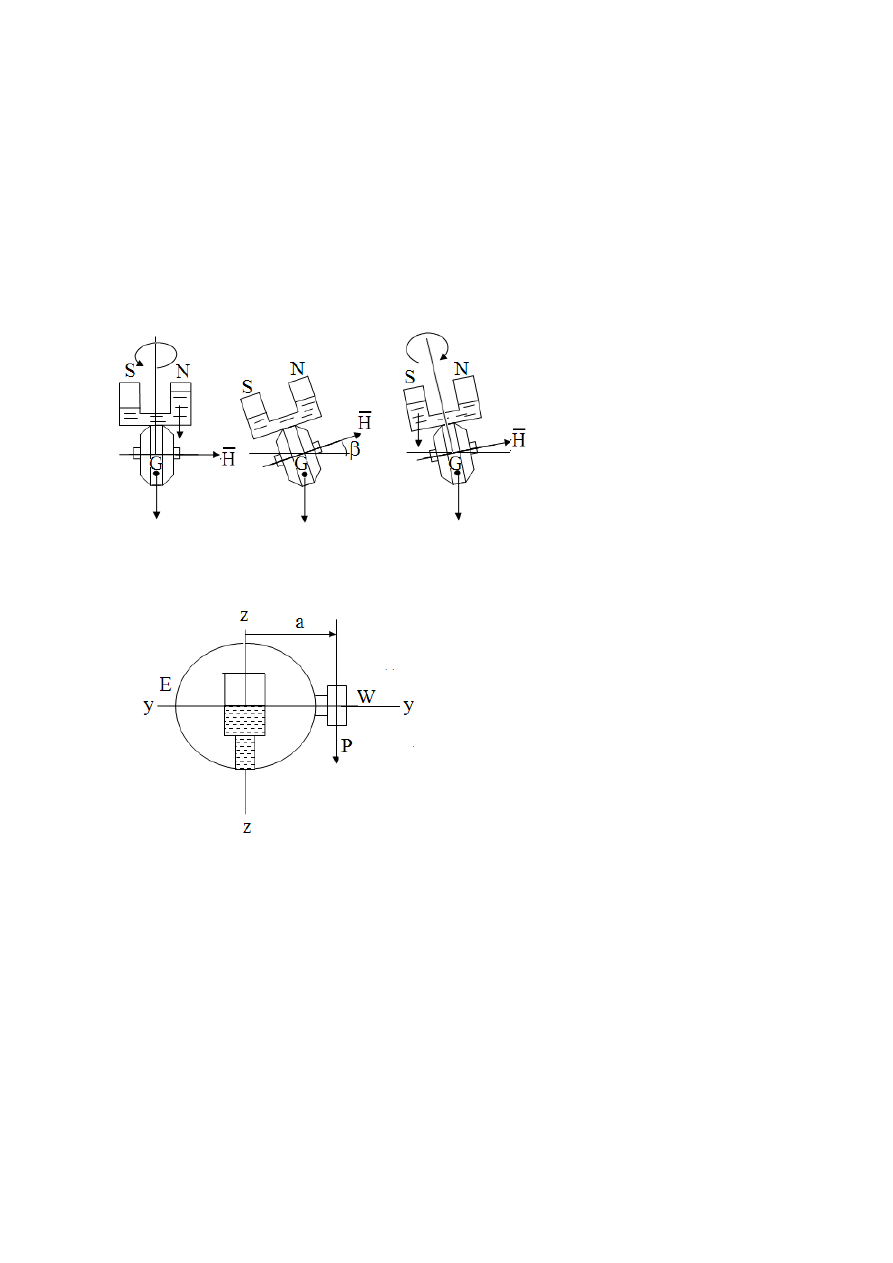
5.Maa magnetväli. Magnetmeridiaan, magnetkurss, magnetkääne. Selle
tähistamine merekaardil ja arvutamine antud aastaks.
Maad ümbritseb magnetväli. Vabalt ülesriputatud raskuspunktist ülesriputud
magnetnõel võtab magnetmeridiaani suuna. Maapinna lõikejoont magnet-
meridiaani tasandiga antud punktis nimetatakse magnetmeridiaaniks.
Magnetmeridiaani tasand antud punktis erineb tõelise meridiaani tasandist, sest
Maa magnetpoolused ei lange kokku geograafiliste poolustega. Vaatleja
asukohta läbivate magnet- ja tõelise meridiaani vahelist nurka nimetatakse
magnetkäändeks ja tähistatakse tähega d. Kui magnetnõela N poolus kaldub
paremale poole tõelisest meridiaanist loetakse magnetkäänet positiivseks,
vastasel juhul negatiivseks
Merekaartidel on näidatud magnetkäände suurus koos mõõtmise aastaga aastase
muutusega. Enne kaardi kasutamist tuleb magnetkäände väärtus arvutada
jooksva aasta jaoks, Näide: 5°18E 2004 6,´7 E arvutada magnetkäände väärtus
aastaks 2022. Δd =(2022-2004)*5,7 =18*5´,7 =102,6´ =1°42,6´
d 2022=5°18+1°42,6 =7°0´,06 E
Magnetkursiks (MK) nimetatakse nurka vaatleja tõelise meridiaani horisondi
tasandis põhjapoolse magnetmeridiaani osa ja laev vööripoolse osa pikitasandi
vahel.
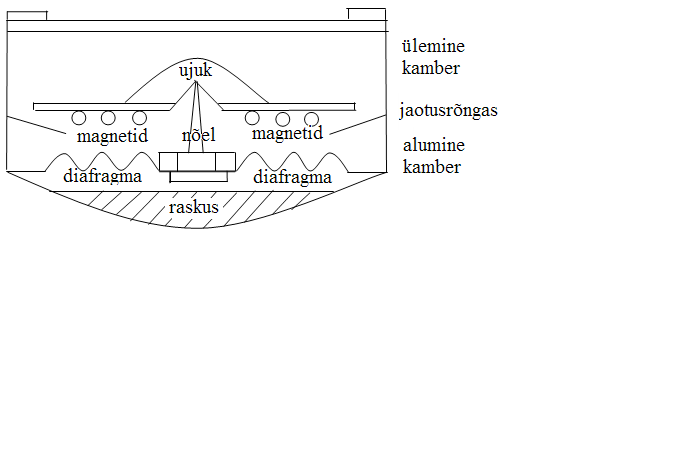
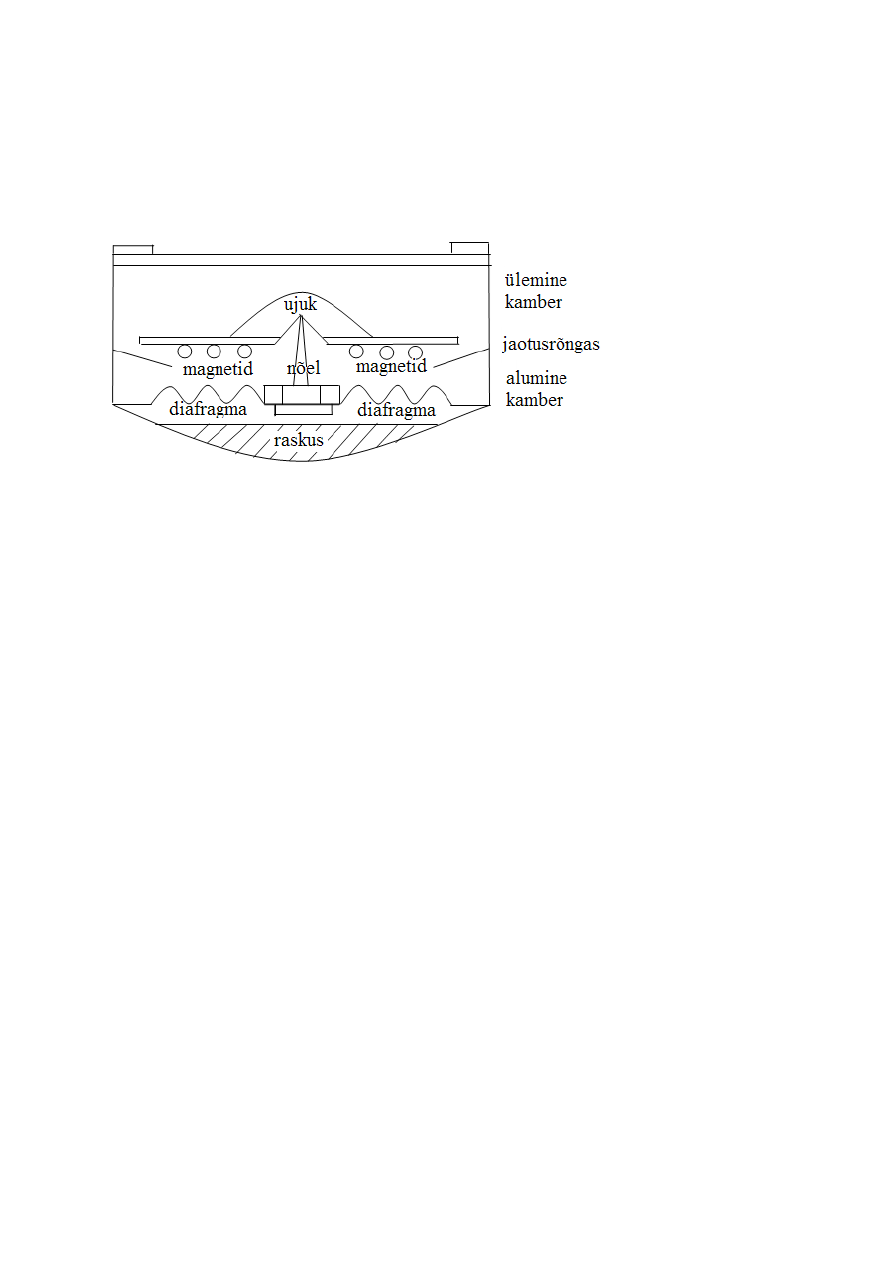
6.Magnetkompassi ehitus
Magnetkompassi põhiosaks on kompassikaart (kompassikodarik), mis on paigutatud
valgevasest kompassikatlasse. Kompassikatel on jaotatud kesksuunas kaldu asetatud rõngaga
ülemiseks ja alumiseks kambriks. Alumise kambri väliskülje juurde kaldu asetatud rõnga alla
kogunevad kompassikatlas vedeliku kao tagajärjel tekkivad õhumullid. Kompassikatla
alumine osa on suletud rõngakujulise diafragmaga, mille ülesandeks on kompassikatelt täitva
vedeliku mahu muutumise kompenseerimine. Kompassikatla alumise osa keskel on keermega
ava, kuhu keeratakse sisse kompassikaarti toetav nõel. Nõela ülemine osa on valmistatud
kõvasulamist, vältimaks tema kiiret nüristumist. Kompassikaardi keskel asub ujuk, mille poolt
tekitatud tõstejõud vähendab kompassinõela ja kompassikaardi vahelist hõõrdumist. Ujuki
keskosas asub kooniline ava, mille ülemisse ossa on paigutatud poolvääriskivist (harilikult
ahhaadist) laager. Kompassikaardi ujuki alumise osa külge on kinnitatud magnetite süsteem,
mis tavaliselt koosneb kolmest eri pikkusega suhteliselt väikese momendiga magnetist.
Kaitseks roostetamise eest on magnetid paigutatud kas valgevasest või plastmassist torudesse.
Pealt on kompassikatel suletud klaasiga, mida hoiab kohal asimuutrõngas. Asimuutrõngale
asetatakse peilingaator, millega peilitakse laevu, tuletorne ja teisi meremärke või mõõdetakse
kursinurki. Selleks on asimuutringile kantud kraadijaotised. Kompassikatla alumise osa külge
kinnitatakse raskus, mille keskel asub elektrilamp kompassikaardi valgustamiseks öisel ajal.
Selleks et kompass laeva õõtsumisel säilitaks rõhtasendi, kasutatakse kardaanriputust.
Kompassikatelt hoiab üleval kompassijalg, kuhu on paigutatud rist-, põik- ja püstmagnetid,
mida kasutatakse deviatsiooni kompenseerimiseks.
Kui laevas on kaks magnetkompassi, nimetatakse ülemisel (kapteni-)sillal asuvat kompassi
peakompassiks, roolikambris asuvat aga roolikompassiks.
7.Laeva magnetväli. Kompassi meridiaan. Kompassikurss. Deviatsioon.
Deviatsiooni määramine. Deviatsiooni tabel. Kompassiõiend. Kursside
õiendamine
Maa mag netväljas laevakorpuse piki, põiki ja püsttalad magneetivad ja laeval
tekib oma magnetväli, mis hakkab mõjutama magnetkompassi näitusid. Laeva
magnetvälja mõju mangetkompassile tekitab deviatsiooni. Deviatsiooni on
osaliselt võimalik kompenseerida komassijalga paigutavate magnetitega.
Kompenseerimata magnetvälja elemendid tekitavad jääkdeviatsiooni.
Jääkdeviatsiooni kohta koostatakse pärast deviatsiooni jõudude kompenseerimist
jääkdeviatsiooni tabel, mida igapäevases kõnepruugis kutsutakse deviatsiooni
tabeliks. Deviatsioonitabel koostatakse kas 24 või 36 kursi jaoks
Jääkdeviatsiooni tabel
Dev
KK
Dev
KK
Dev
KK
Dev
0
+ 2,0
100
– 2,3
190
– 0,7
280
+ 2,3
10
+ 1,7
110
– 2,7
200
+ 0,3
290
+ 3,0
20
+ 1,3
120
– 3,0
210
+ 0,7
300
+3,0
30
+ 1,0
130
– 2,7
220
+ 1,0
310
+ 2,7
40
+ 0,5
140
– 3,0
230
+ 1,4
320
+2,5
50
0,0
150
– 2,7
240
+ 1,7
330
+ 2,3
60
– 0,7
160
– 2,3
250
+ 2,0
340
+ 2,2
70
– 1,0
170
– 2,5
260
+ 2,3
350
+ 2,1
80
– 1,5
180
– 1,7
270
+ 2,5
360
+ 2,0
90
– 2,0
Jääkdeviatsiooni määramine
Määrata jääkdeviatsioon kompassikusi 87° jaoks. Selleks tuleb kasutada
interpoleerimist. Δδ=-0,5/10*7=-0,35. kui sajandik on 0,5 ümardatakse tulemus
paarisarvu poole. Antud juhul ümardatakse 0,4 -ks. Seega KK=87 deviatsioon
on
-1.5 +(-0,4)= -1,9
Lisaks deviatsioonile tuleb magnetkompassi jaoks arvestada ka magnetkäänet,
Jääkdeviatsiooni ja magnetkäände summat nimetatakse kompassiõiendiks.
Matemaatiliselt ΔΚ =δ+d
Kompassi kurssi õiendatakse järgnevat skeemi kasutades
KK =
+ δ =
ΜΚ=
+d =
TK
=
8.Vurrkompass. Vurrkompassi õiend ja selle määramine
Vurrkompass on kursinäitaja, mille töö põhineb vurri omadusel, mida
nimetatakse pretsessiooniks.
Vurrkompassi õiendit saab määrata liitsihil ja kahe rõhtnurgaga asukoha
määramisel.
9.Pikkuse ja kiiruse ühikud merel. Läbitud tee mõõtmine. Laeva kiiruse
määramine.
Laevajuhtimises tarvitatavad kauguse ja kiiruse põhiühikud on meremiil,
kaabeltau ja sõlm. Meremiil võrdub meridiaanikaare ühe minutiga, meremiili
pikkus meetrites või kilomeetrites on erinev sõltuvalt kaardi koostamise aluseks
kasutatud ellipsoidi mõõtmetest. 1928 aasta Merenduskonverentsil lepiti kokku,
et meremiili pikkus on 1852 meetrit. 1/10 meremiili nimetatakse kaabeltauks.
Laeva kiirust mõõdetakse sõlmedes. Kiirus 1 sõlm tähendab, et laev läbib ühe m
10. Käsilogi. Mehhaaniline logi. Hüdrodünaamiline logi. Pardalogi. Logide
lühike iseloomistus ja tööpõhimõte
Laeva kiirust mõõdetakse logiga. Logisid on kahte tüüpi. Ühed mõõdavad
kiirust, teised läbitud vahemaad.
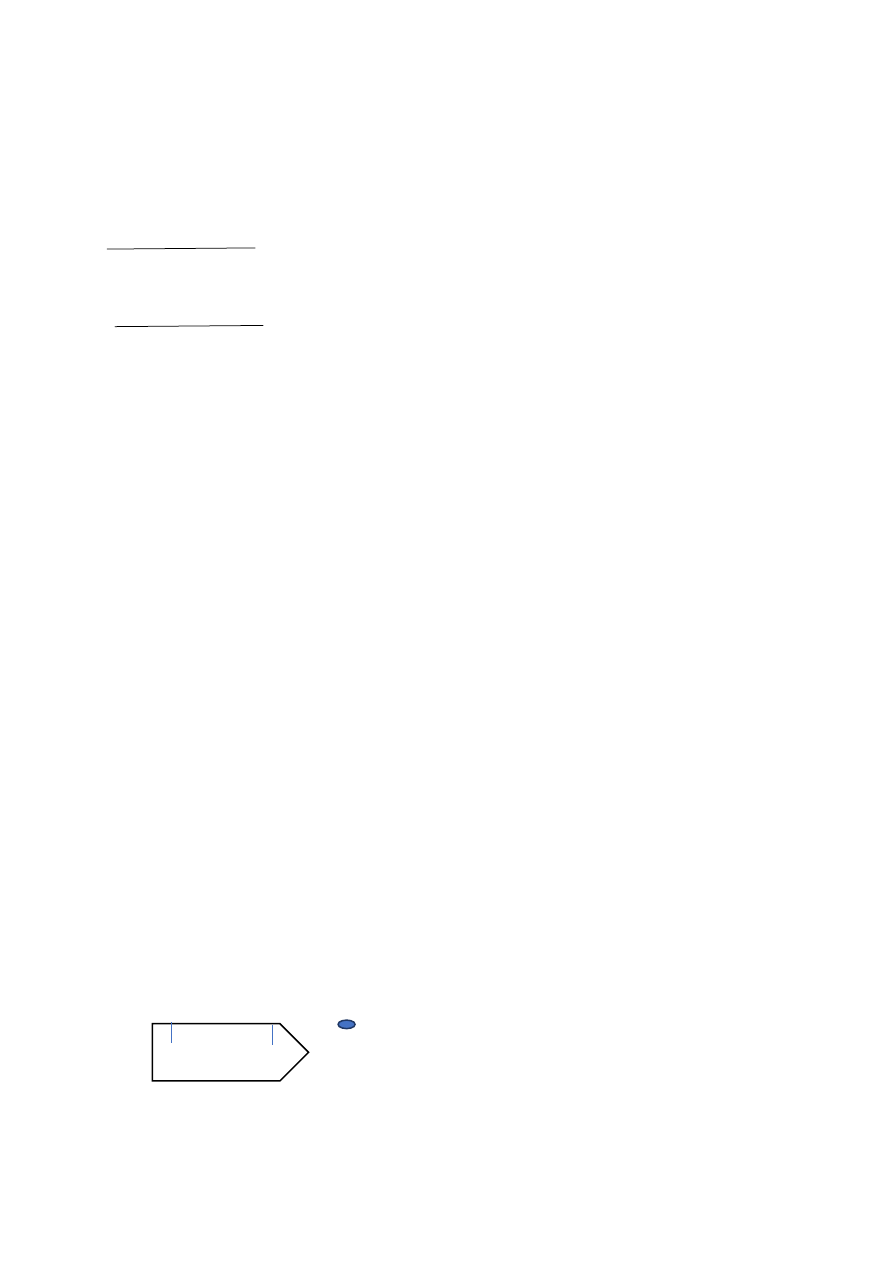
Pardalogi. Kõige lihtsam kiiruse mõõtmise vahend
Laeva pardale tehakse 2 joont ja mõõdetakse nendevaheline kaugus S. kiiruse
mõõtmiseks visatakse vöörist pisut ettepoole ujuv keha. Kui see jõuab esimese
tiivik
Logiliin
hooratas
luger
märgini, käivitatakse stopper. Kui ujuv keha jõuab ahtri märginii seisatakse
stopper. Valemi V=S/t järgi arvutatakse laeva kiirus.
Sektorlogi mõõtis 30 sekundi jooksul väljajooksnud logiliini pikkust, mille järgi
arvutati laeva kiirus. Logiliinil olid jaotatud ja märgistatud sõlmedega, mis
vastasid muudetud kiirusele.
Mehaaniline logi mõõtis läbitud vahemaad ja koosnes tiivikust, mida veeti laeva
taga logiliini otsas ja tiiviku pöörete lugejast, mis oli kinnitatud ahtris reelingu
külge. Pöörete arv ühe miili kohta oli teada,
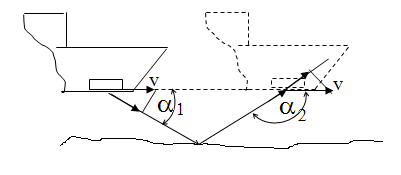
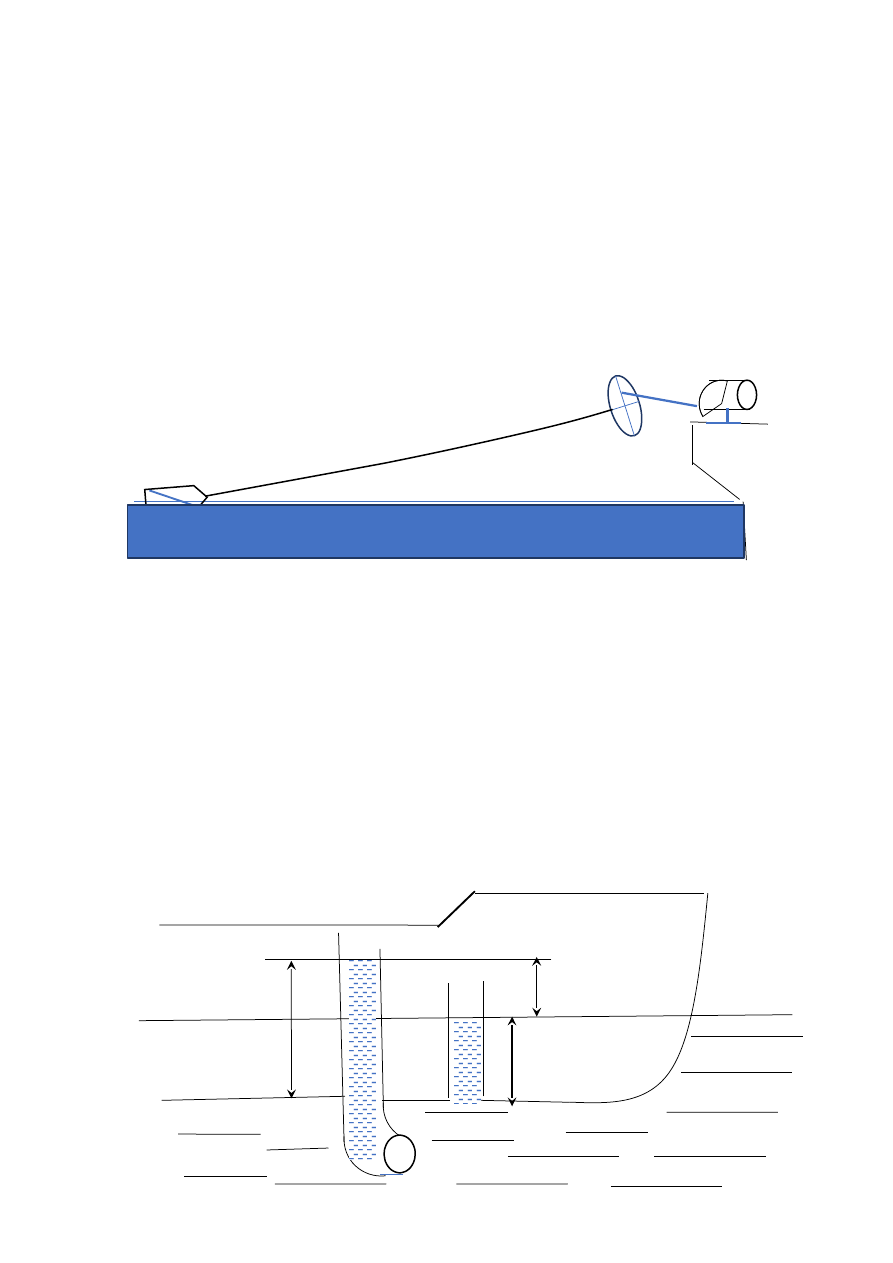
Hüdrodünaamiline logi.
• Hüdrodünaamiline logi mõõdab laeva kiirust vee suhtes.
• Hüdrodünaamilise logi töö põhineb laeva liikumisel tekkiva vee
vastuvoolu rõhu mõõtmisel.
• Vaja on leida funktsionaalne sõltuvus rõhu ja kiiruse vahel
• P =f(v) P=kov2
Δhh
h2=const
h1
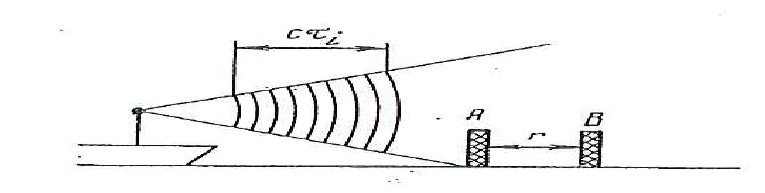
Dopplerlogi
Dopplerlogi toimib järgmiselt. Saatjast lähtub sagedusega f0 signaal põhja
suunas. Signaal peegeldub põhjast vastuvõtja poole juba sagedusega f1. sama
signaal jõuab vastuvõtjasse juba sagedusega f2. sageduste f2.ja f0
vahe Δf
väljendub valemiga
Δ f =f
0
(
c+ v
c− v
−
1
) kui sulgdes olev avaldis viia ühisele nimetajale
saame
Δ f =f
0
(
c+v−c+ v
c−v
) koondades sarnased liikmed, saame
Δ f =f
0 2 v
c−v kuna c>> v, siis
v=
Δfc
2 f
0
Erinevalt teistest logidest mõõdab dopplerlogi kiirust ka põhja suhtes.
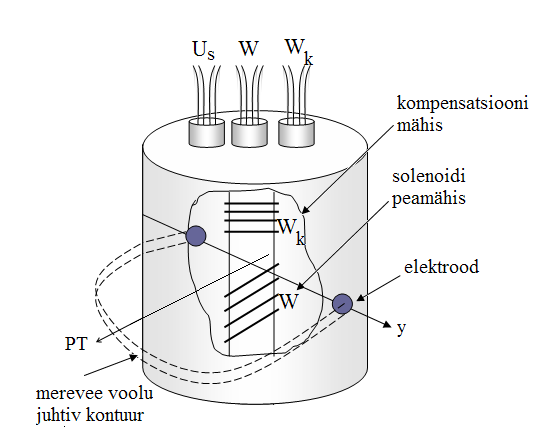
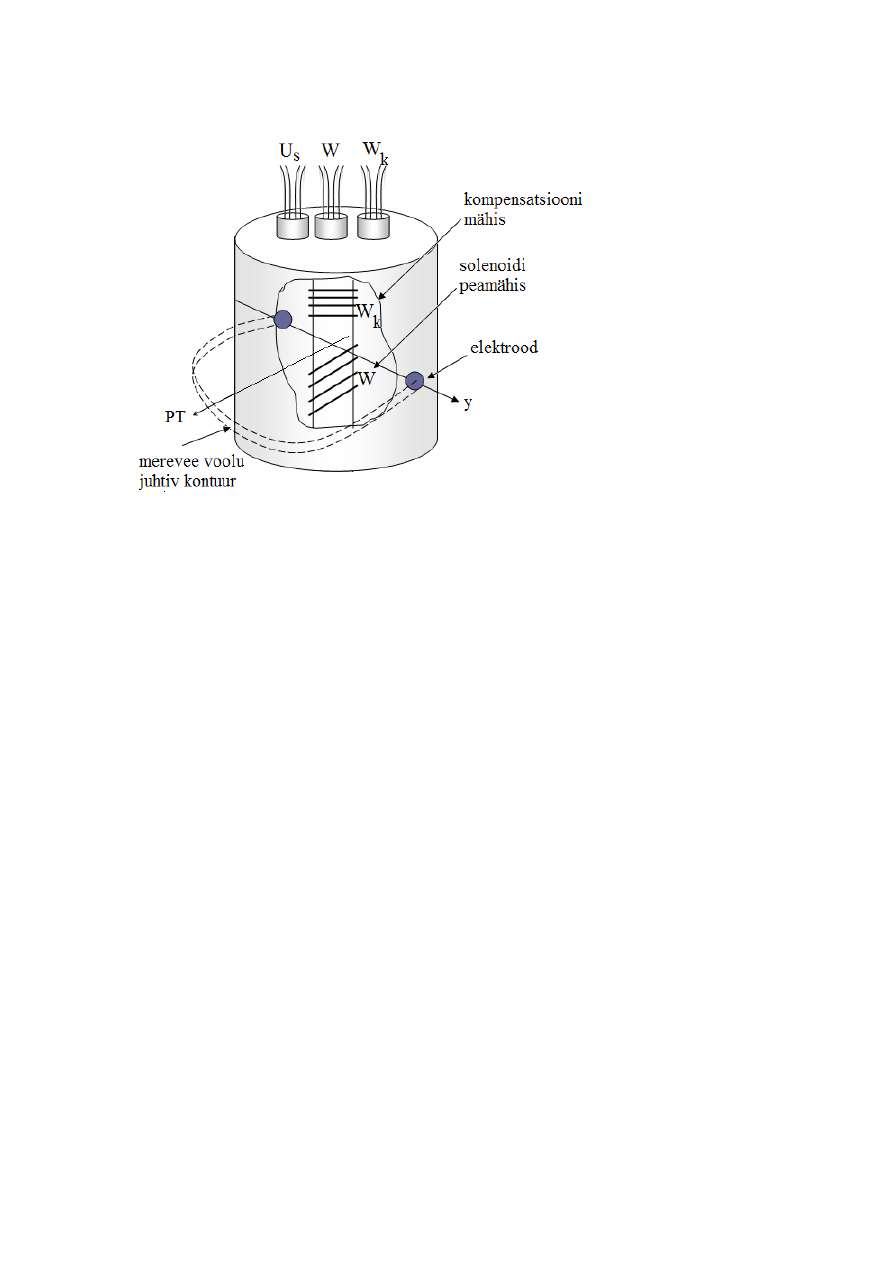
Induktsioonlogi
Kui panna magnetväli liikuma merevee suhtes, mis tänu
soolsusele on merevesi voolujuht ja mõõta seejuures tekkiv
elektromootornejõud, peaks olema võimalik mõõta laeva kiirust.
Sellel põhimõttel töötavat logi nimetatakse induktsioonlogiks.
Induktsioonlogi tundlikuks elemendiks on pronksist elliptiline
silinder, mis lükatakse merre läbi laeva põhjas oleva ava.
Silindrisse on paigutatud kahe mähisega solenoid. Mähis W on
pea-, Wk – kompensatsioonimähis. Tundliku elemendi pinnale
paigutatud elektroodid on otseses kontaktis mereveega, mis
moodustab tundliku elementi ümber voolu juhtiva kontuuri.
Oletame, et tundlik element ja voolu juhtiv kontuur on paigal.
Kui solenoidi peamähisele anda vahelduvpinge, tekib, vastavalt
Faradey elektromagnetilise induktsiooni seadusele, tundlikku
elementi ümbritsevas kontuuris elektromotoorjõud.
Elektromootornejõud tekib ka siis kui laev seisab.
11. Logiõiend ja logitegur. Laeva kiiruse ja logiõiendi määramine
Nagu igal teisel mõõturil on ka logil oma õiend. Logiõiendi määramiseks on
kaks võimalust
1)logiõiendi määramine mõõdumiilil, mis annab täpsema tulemuse kui kaardi
järgi läbitud tee S võrdlemine logi järgi läbitud teega. Siiski enamuses
kasutatakse teist võimalust, sest mõõdumiilil mõõtmiste toimetamine võtab palju
aega, sest teoreetiliselt tuleks logiõiend määrata masina peamistel töörežiimidel:
Täiskäik , keskmine käik ja tasane käik,
Logiõiend väljendatakse protsentides logi näitude vahe kaudu
Δlg ¿
s−(l g2−lg1)
lg
2−lg1
∗
100
Δlg ¿
s−LNV
LNV
∗
100
Loginäitude parandamiseks kasutatakse ka logitegurit Klg ,mis on tõeliselt
läbitud tee suhe loginäitude vahesse
Klg=
S
lg
2−lg❑
=
1+
Δlg
100
Sel juhu läbitud tee avaldub järgmiselt
S
lg ¿¿¿ ¿
Logiteguri kasutamisel pole märki vaja silmas pidada.
12. Sügavuse mõõtmine merel. Käsilood. Mehhaaniline lood. Kajalood
Mere sügavust mõõdetakse loodiga. Olenevalt mõõdetava sügavuse väärtusest
jagatakse loodid süvavee ja navigatsioonilisteks loodideks. Süvavee loodid
paigutatakse hüdrograafia laevadele. Navigatsioonilisi loode kasutatakse kuni 50
meetriste sügavuste mõõtmiseks
Käsilood
Käsiood koosneb tina- või malmkuulist massiga3,5 – 5 kg, väikesest terastrossist
valmistatud ja nahaga kaetud tropist ning sell külge seotud valgest kanepiliinist,
mida nimetatakse loodliiniks. Kuulil on terava kuuetahulise tüvipüramiidi või
koonuse kuju kõrgusega 25-30 cm. Kuuli alaosas on süvend, mis täidetakse
rasva või kriidipulbri seguga,
L
A
B
O
h
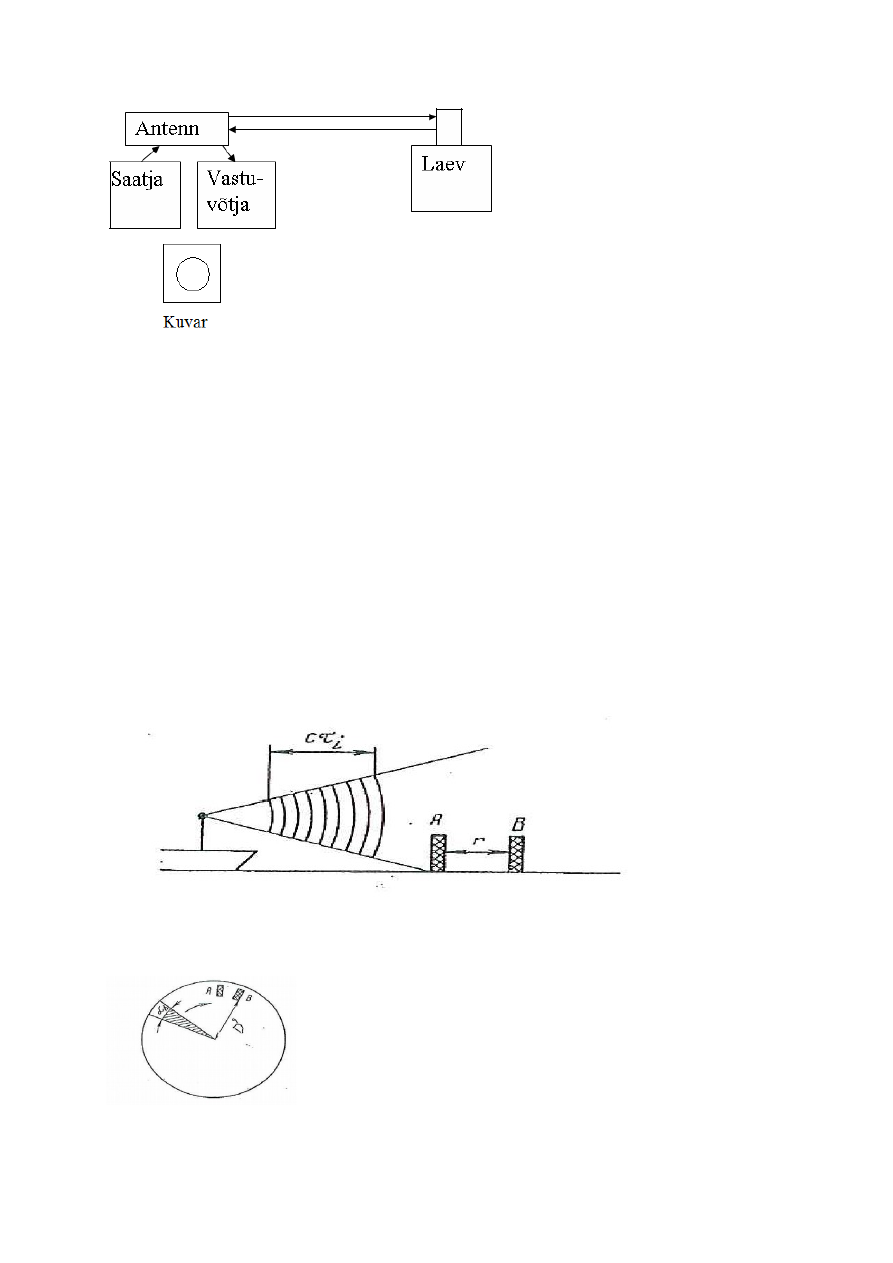
.Kajalood.
Sügavuste mõõtmine heliga.
Hüdroakustilisi seadmeid, mis on ette nähtud mingi veealuse
objekti sügavuse mõõtmiseks nimetatakse kajaloodideks.
Kajaloodiga sügavuse mõõtmine põhineb merepõhjast
peegeldunud helilainete kaja kasutamisel.
Olgu laevas punkti A paigutatud heli kiirgur ja punkti B
peegeldunud
helilainete
vastuvõtja.
Tähistame
vibraatoritevahelise kauguse L siis
2
2
2
2
L
AO
h
Kus h on sügavus kiilu all
Kui heli levikiirus C on teada ja ajavahemik saate ja vastuvõtu
vahel t on teada, siis
h=
√
C
2 t2
2
−
L
2
4
(1)
Suurematel sügavustel, kus L>>h võib suurusega (L/2)2 mitte
arvestada, seega:
2
Ct
h
Saadud valem näitab, et põhimõtteliselt taandub sügavuse
mõõtmine saate ja vastuvõtu vahelise aja mõõtmisele.
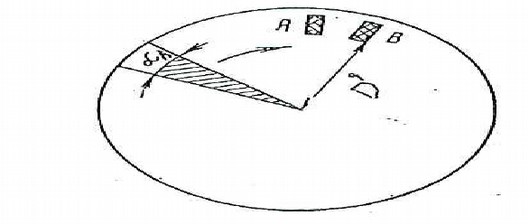
Sügavustel 10 m ja heli kiirusel 1500 m/sek tähendab see
ajavahemiku mõõtmist 0,0066 ja vähem sekundit. Selliste
lühikeste ajavahemike mõõtmise üks viise on pöörleva ketta
kasutamine.
13.Merekaardid. Kaardi mastaap. Mastaabi ülim täpsus. Kartograafiliste
projektsioonide liigitus
Tee valikuks ühest punktist teise, laeva tee graafiliseks kujutamiseks, laeva
asukoha määramiseks on tarvis sõidupiirkonna tasapinnalist kujutist ehk kaarti.
Kaart on maakera pinna või mõne selle osa tasapinnaline kujutis, mis on
vähendatud mingis mastaabis – kaardimõõdus. Iga punkti asend Maa pinnal
määratakse tema koordinaatidega – laiuse ja pikkusega. Selleks, punkti oleks
võimalik kujutada kaardil peab koostama koordinaatsüsteemi, mis vastaks Maa
paralleelidele ja meridiaanidele. Meridiaanide ja paralleelide võrgu tinglikku
kujutamise viisi nimetatakse kartograafiliseks projektsiooniks.
Kaardi mastaap. Mastaabi ülim täpsus.
Mingi kaardil kujutatud sirglõigu pikkuse suhet selle sirglõigu pikkusega
looduses nimetatakse kaardimõõduks ehk mastaabiks. Eristatakse kahte liiki
mastaape: arvmastaapi ja joonmastaapi.
Arvmastaap on murd, mille lugeja on 1 ja nimetajaks arv, mitu pikkusühikut
antud maaalal vastab ühele ühikule kaardil. Näiteks mastaap 1/100 000
tähendab, et ühele pikkusühikule kaardil vastab 100 000 pikkusühikut looduses.
Mida suurem on arvmastaabi nimetaja seda väiksem on mastaap.
m
R
M
r
Joonmastaapi kasutatakse siis, kui on tarvis kanda kaardile antud pikkusega
sirglõik või mõõta kaugusi kaardil.
Mastaabi ülim täpsus on väikseim kaugus, mida võib kaardil mõõta. Inimese
silm ei suuda eristada vahemikku alla 0,2 millimeetri. Selline on ka graafilise
kujutise täpsus kaardil. Mastabi ülima täpsus määramiseks tuleb arvmastaabi
nimetaja korrutada 0,02 sentimeetriga. Näi8teks kaardil mastaabiga 1/100 000
on ülim täpsus 0,02*100 00 20 meetrit.
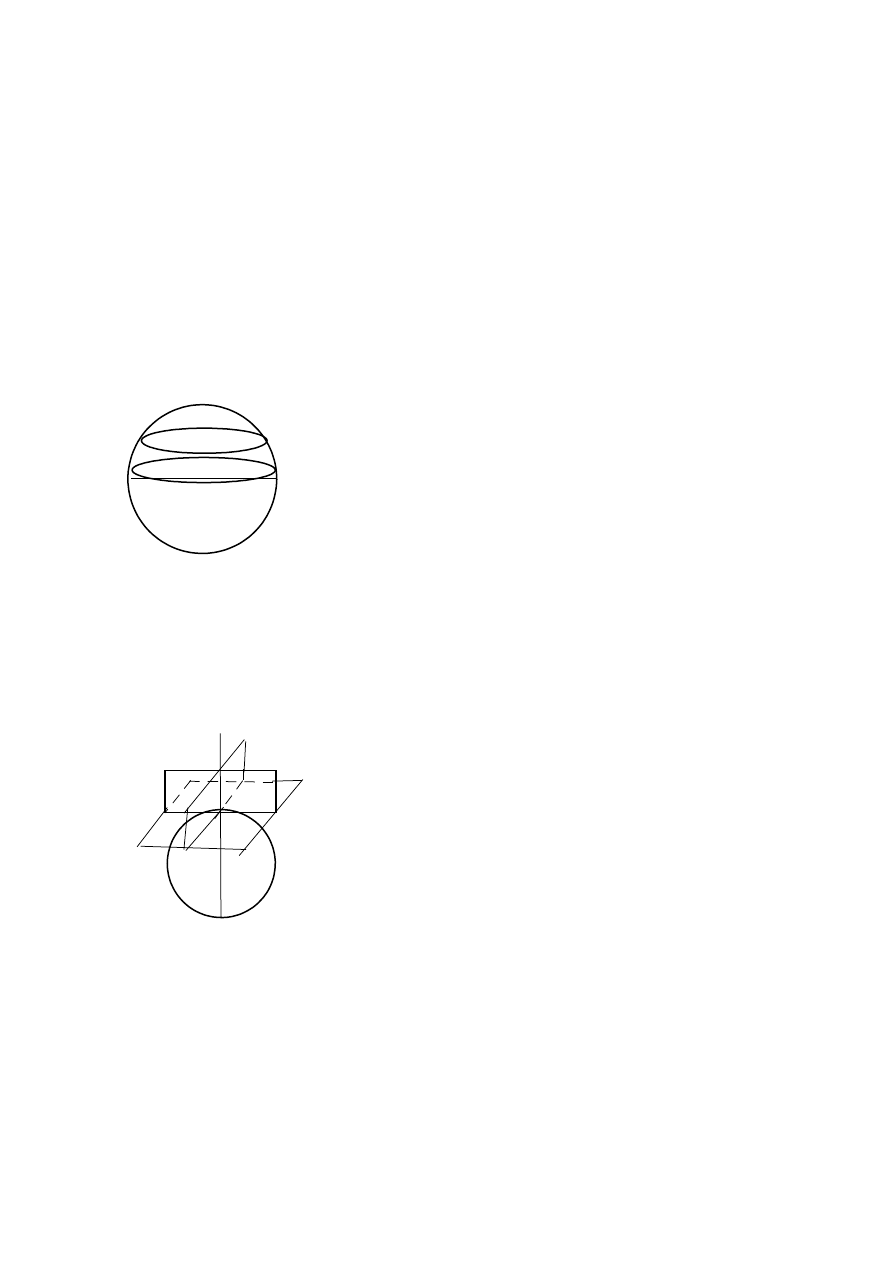
Kartograafiliste projektsioonide liigitus.
Projektsioonide liigitusi on kolm : võrdnurksed, võrdpindsed, suvalised
Võrdnurksed projektsioonid säilitavad nurkade suuruse ja vormide sarnasuse.
Võrdpindsed säilitavad kujutiste pindade võrsdsuse.
Kartograafiliste projektsioonide liigitus kartograafilise võrgu ehituse järgi.
Asimuudiline projektsioon saadakse Maa koordinaatide projitseerimisel puute -
tasandile, mida nimetatakse pilditasansdiks
Koonusprojektsioon saadakse maakera koordinaatide projekteerimisel puutuva
või lõikava koonuse pinnale. Koonusprojektsioonil on paralleelid kujutatud
kontsentriliste ringidena ja paralleelid sirgetena.
Silinderprojektsioon saadakse maakera koordinaatide projekteerimisel puutuva
või lõikava silindri pinnale. silinderprojektsioonil on paralleelid sirged,
meridiaanid risti paralleelidega.
14. Merekaartidele esitatavad nõuded. Merkaatori projektsioon.
Merkaatorikaardi pea- ja erimastaap. Loksodroom ja ortodroom
Laeva tee mugavaks arvestamiseks ja graafiliseks kontrolliks esitatakse
merekaardile järgmised nõuded:
Laeva kursijoon peab olema sirge. Selleks peavad meridiaanid ja paralleelid
olema sirged ja omavahel risti.
Projektsioon peab olema võrdnurkne .s.t. nurgad kartograafilisel projektsioonil
peavad võrduma nurkadega looduses.
Merkaatori projektsioon. Kõigile ülaltoodud nõutele vastab merkaatori
projektsioon, mille töötas välja Hoolandi kartograaf Gerhard Kremer teadlase
nimega Merkaator 1569 aastal. Selle projektsiooni saamiseks paigutatakse Maa
silindrisse nii et Maa telgi langeb kokk silindri teljega .Meridiaanid
projekteeritakse silindri seintele , neid õgvendades. Paralleelid projekteeritakse
samuti silindri seinale, kusjuures kõik paralleelid venitatakse ekvaatori
pikkuseks. Silindri seintele moodustub meridiaanide ja nendega ristuvate
paralleelide võrgustik. Et saavutada võrdnurkset projektsiooni tuleb võrdselt
välja venitada ka meridiaanid.
Merkaatori pea ja erimastaap.
Merkaatori projektsioonis koostatud kaartidel on ühe meridiaani minuti pikkus
erinev. Laiuse suurenedes suureneb ka ühele miile vastava lõigu pikkus.
Seepärast on merkaatori kaardi mastaap muutuv suurus. Mastaapi, mida
kasutatakse kaardi antud laiuse jaoks nimetatakse eri mastaabiks. kauguse
mõõtmisel merkaatori kaardil peab merkaatori pikkuse võtma samal laiusel.
Kaardi tiitlis on antud arvmastaap. Iga kaardi moodustamise aluseks on võetud
tema arvmastaap, mis , mis ühtlasi näitab talle vastava peaparalleeli.
Loksodroom, ortodroom
Püsikursil sõitev laev sooritab maapinnal kõverjoonelise teekonna, mida
nimetatakse loksidroomiks. Meridiaane lõikab loksodroom ühe ja sama nurga
all. Loksodroomi lõiku, mille laev läbib nimetatakse sõiduks. Kahe maakera
punkti vaheline lühim tee on suurringi kaare lõik, mida nimetatakse
ortodroomiks. Sõitu mööda ortodroomi kasutatakse ookeanide ületamiseks.
15. Meridionaalosad. Merkaatori kaardivõrgu ehitus
Meridionaalosa on kaugus merkaatori kaardil ekvaatorist antud paralleelini
väljendatuna ekvaatoriminutites mõõdetuna piki meridiaani. Meridionaalosi
kasutatakse laeva asukoha analüütilisel arvutamisel. Meridionaalosad on
leitavad meretabelites. Meridionaalosade vahe on kaugus kahe antud paralleeli
vahel piki meridiaani. Selleks tuleb meretabelitest leida mõlema paralleeli
meridionaalosad ja arvutada meridionaalosade vahe.
16. Gnomoonprojektsioon. Merekaartide liigitus.
Asumutaalprojektsiooni, kus projektsiooni keskpunkt(vaatleja silm) ühtub
maakera keskpunktiga nimetatakse gnoomina- ehk tsentraalprojektsiooniks.
Laevajuhtimises kasutatakse gnomoonprojektsiooni suurringi mööda sõitmiseks.
Merekaartide liigitus.
Sisu ja ülesande järgi jaotatakse merekaardid navigatsiooni, abi ja
teatmekaartideks.
Navigatsioonikaardid on ohutuks meresõiduks kõige olulisemad.
Navigatsioonikaaartidel peetakse laeva tee graafilist arvestust, märatakse laeva
asukohta ja muid navigatsiooni ülesandeid. Sisult ja mastaabilt jagunevad
navigatsioonikaardid
-üld(generaal)kaardid,
-sõidukaardid
-erikaardid –
- plaanid
-abikaardid
Üldkaartide kaardimõõt jääb vahemikku 1 : 5 000 000...1 :
500 000.
Üldkaarte kasutatakse üldiste meresõidutingimustega
tutvumiseks, laeva kavandatud reisi mahamärkimiseks, laeva
arvutatud koha kaardile kandmiseks sõidul ookeanil.
Sõidukaartide kaardimõõt jääb vahemikku 1 : 500 000...1 : 50
000. Sõidukaarte kasutatakse sõidul ranna lähedal ja
lähenemisel rannale. Reisi planeerimisel kantakse üldkaartidelt
kursid sõidukaartidele.
Erikaartide kaardimõõt jääb vahemikku 1 : 75 000...1 : 25 000.
Neid kasutatakse sõidul päris ranna lähedal, skäärides ja
kitsustes.
Plaanide kaardimõõt jääb vahemikku 1 : 25 000...1 : 1000.
Plaane asutatakse sadamasse või jõesuudmesse sisse- ja
väljasõidul.
Abikaartide hulka kuuluvad võrkkaardid, kontuurkaardid.
Teatmekaartide hulka kuuluvad Maa magnetvälja elementide
kaardid, soodsate mereteede kaardid, hüdrometeoroloogilised
ja hüdroloogilised kaardid.
17. Merekaartide sisu Kaardile märgitud lühendid ja
tingmärgid. Kaardi läbitöötamine.
Kaardi lugemise järjekord in järgmine. Täpsustada kaadi tiitel,
seejärel loetakse kaarditiitlit täiendavad selgitavad ja
märkused. Edasi tuleb kindlaks teha kaardi mastaap. , peab
selgitama millistes ühikutes ja millisest tasandist on arvestatud
sügavused, milline magnetkääne ja tema muutumine.
Järgmiselt tuleb uurida merepõhja reljeefi, kaldajooneiseloomu
ning põhilisi orientiire kaldal ja vees. Kaardi koostamise ja
väljaandmise ja korrektuuri kuupäevad võivad aidata otsustada
kaardi andmete usaldusväärsuse üle. Sügavusi uurides tuleb
silmas pidada, et tihedalt ja reeglipäraselt kantud sügavuse
osutab üksikasjalikule mõõtmisele. Kaldajoone usaldatavuse üle
võib otsustada kaldajoone pidevuse järgi. Rannasõidul tuleb
alati kasutada kõige suurema mastaabiga karte.
18. Kaarditöö riistad. Laeva tee märkimine ja selle
täpsus.
Kaarditöö riistadeks on
-rööpjoonlaud kursside ja peilingute kaardile kandmiseks
-transportiir- kursside ja peilingute kaardile kandmiseks
-pliiats
-
mk
+
mk
+ΔhS
s
-ΔhS
s
A
B2
B1
D1
D2
-kustukumm
pidev ja hoolikas laeva tee kaardile kandmine on ohutu
laevajuhtimis tähtsaim eeldus. Laeva liikumise märkimine
annab võimaluse igal hetkel hinnata laev asukohta ja
orienteeruda ümbritsevas keskkonnas. Graafilise arvutuse
korral antakse laeva kursid ja asukoht, mis saadakse
mitmesuguste vahetult kaardile. Hoovuse ja tuule mõjul võib
laev hälbida ettenähtud kurdsilt kõrvale. Kontrollimiseks tuleb
orientiiride vaatlusega laeva asukoht kindlaks määrata. Laeva
asukoha kindlaksmääramist kaldaorientiiride järgi nimetatakse
observeerimiseks kohta laeva observeeeritud asukohaks, mida
tähistatakse ringiga. Sõidu alustamise punkt kantakse
koodinaatide järgi kaardile. Selle koha juurde kirjutakse
kellaaed ja logi näit.
kalda nähtavuse ulatuses märgitakse arvutatud koht kaardile
iga tunni tagant, avamerel iga nelja tunni tagant. Αrvutatud ja
observeeritud asukohad ühendatakse hälvet tähistava märgiga.
Laeva tee arvutuse põhielemendid on läbitud tee ja kurss,
seepärast sõltub arvutuse tulemus kompassiõiendi mk ja
logiõiendi mlg täpsusest.
Kompassivea mk tõttu kaldub laev kursist paremale või vasakule suuruse
mk-S/60 võrra ja logi vea mL tõttu ΔS =mlgS/100. juhul kui esinevad mõlemad
vead on laeva tõenäoline koht kujundi B1 B2 D1 D2 sees mille raadius R on
R=
s
10
√
m
k
2
36
+
m
lg
2
100
19. Pöördering ja selle määramine.
Kursi muutmisel joonistab laev kõvera, mida nimetatakse
pöörderingiks.
Kui laeva rool pikitasandist välja viia ja jätta ta sellesse
asendisse, hakkab laeva kurss pidevalt muutuma. Kui rool jäta
sellesse asendisse piisavalt pikaks ajaks sooritab laev ühe või
rohkem täispööret. Joonistatud kõverat nimetatakse
tsirkulatsiooniks ehk pöörderingiks. Kaugust esialgse kursijoone
ja laeva pikitasandi vahel kui laev muutnud kurssi 180° võrra
nimetatakse pöörderingi diameetriks. Aega, mille jooksul laev
sooritab ühe täispöörde nimetatakse täispöörde ajaks.
Tsirkulatsiooni elemente saab määrata mitmel viisil.
Tsirkulatsiooni elementide määramine liitsihil radariga
mõõdetud traaversi kauguse järgi.
.) Punktis A pannakse rool täispardasse paremale, mõõdetakse radariga kaugus
d liitsihi märgini ja käivitatakse stopper. Kui laev on pöördunud 180° võrra,
asub ta punktis B. Seejärel mõõdetakse radariga kaugus d′ liitsihi märgini ja
seisatakse stopper. Kauguste vahe d′– d annab pöörderingiläbimõõdu.
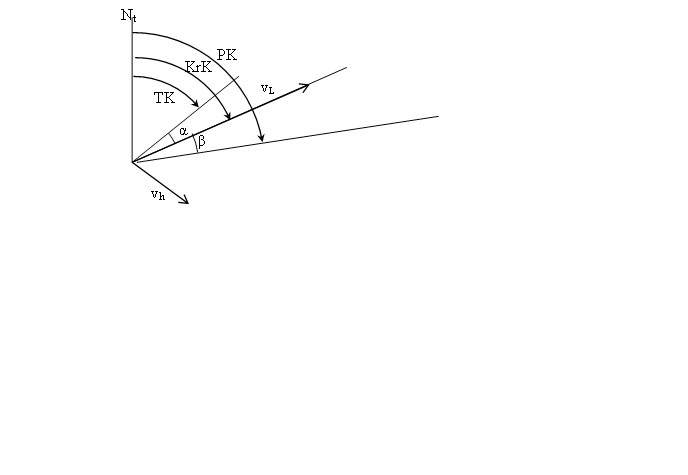
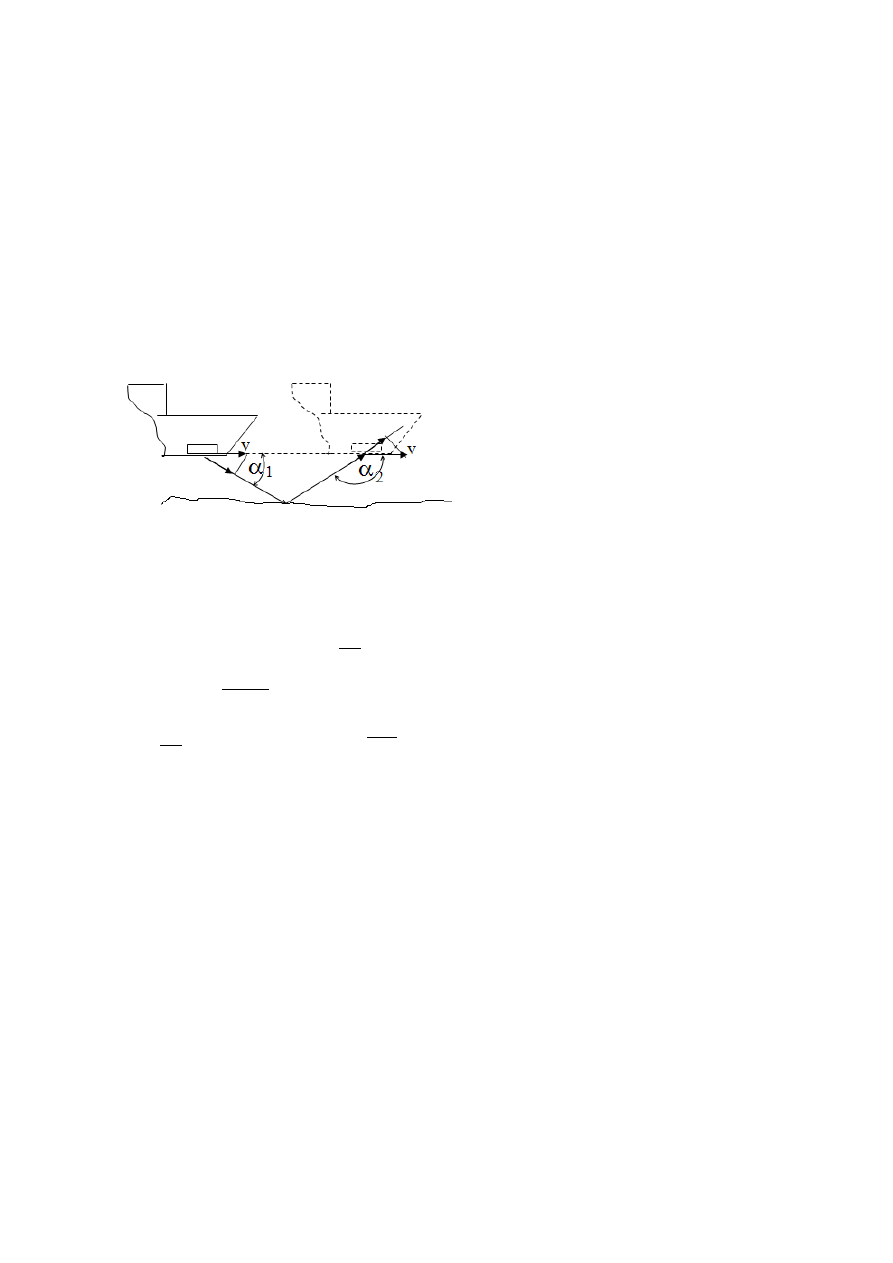
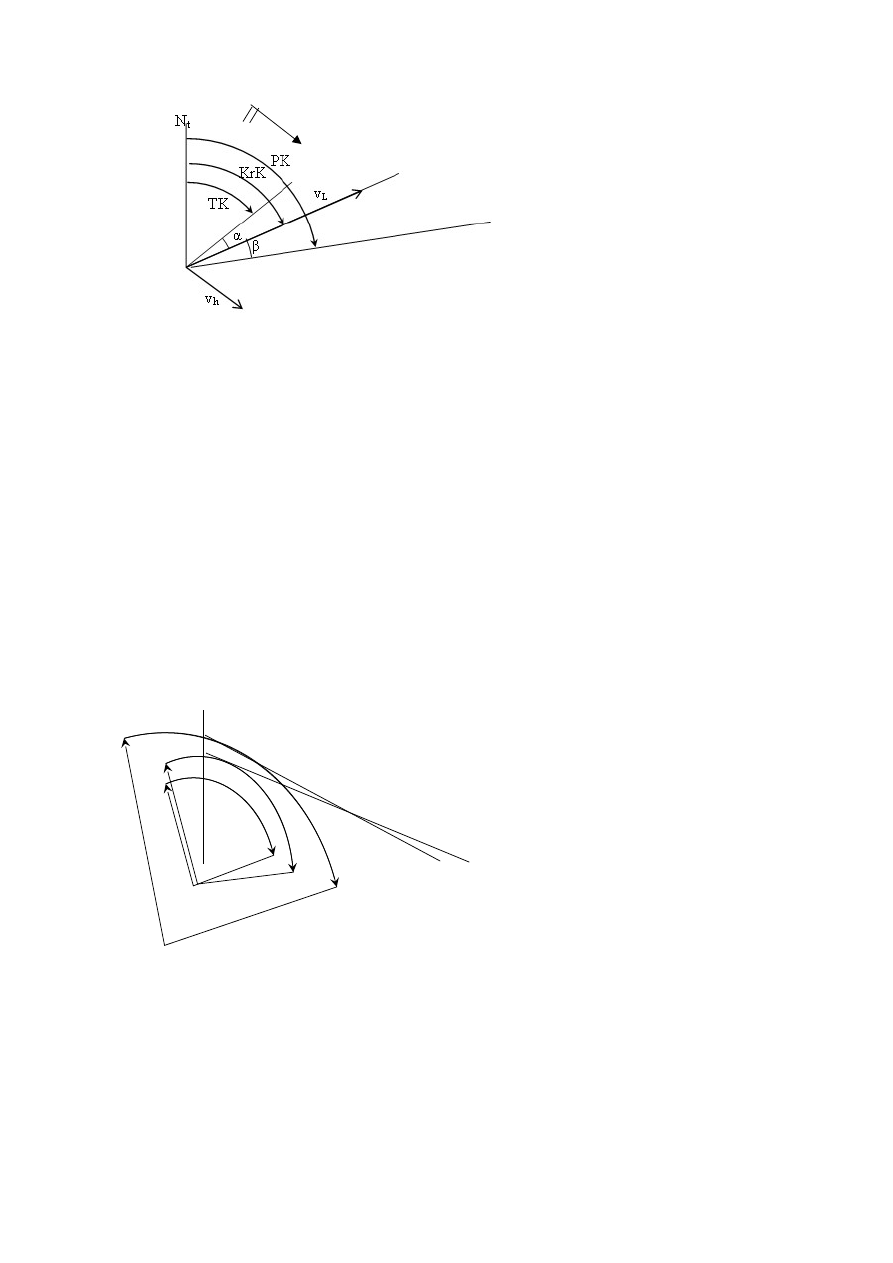
20. Laeva triiv ja selle määramine.
Sõidu ajal mõjub laeva liikumisele tuul. Tuulesurve rakendub
laeva purjestuspinna keskmesse. Tuule üldsurve on tavaliselt
on pikitasandiga mingi nurga all ja jaotatakse kaheks
ΚrΚrΚrΚ
TΚrΚ
α
α
KK 75°(+7) α=+8°
komponendiks.
Üks komponentidest on suunatud mööda laeva pikitasandit,
teine temaga risti, mis põhjustab külgnihke ja laeva kursist
kõrvale kaldumise. Laeva hälbimist tuule mõjul nimetatakse
triiviks. Kui tuul on vasakust pardast loetakse triivi positiivseks.
kui tuul on paremast pardast loetakse triiv negatiivseks. Laeva
tegelikku liikumise suunda triivi mõjul nimetatakse
kaardikursiks, mida tähistatakse KrK. Laeva triivi tähistatakse
kreeka tähega α (alfa). Kaardikurss, tõeline kurss ja triiv on
algebraliselt seotud järgmiselt:
KrK = TK+α, ΤΚrΚ =KrK - α
Triivi suurus määratakse vaatluste abil või arvutuslikul teel.
Triivi suurust avamerel võib määrata kiiluvee peilimise teel.
Triivi arvestamisel kantakse kaardile kaardikurss.
Triiviarvestamise alguspunktist kantakse kaardile 4 -5 cm
pikkuse joonega ka tõeline kurss. Kaardikursi joonele
kirjutatakse kompasikurss, kompassiõiend ja triivinurga suurus
21. H
oovused ja nende arvestamine.
Hoovuseks nimetatakse veemasside liikumist, mida
iseloomustavad masside liikumissuund ja kiirus. Kui veemassid
ei liigu ,ühtib laeva liikumine vee suhtes liikumisega põhja ja
kalda suhtes, kui aga veemassid liiguvad toimub laeva liikumine
laeva ja hoovuse suuna resultandi suunas.
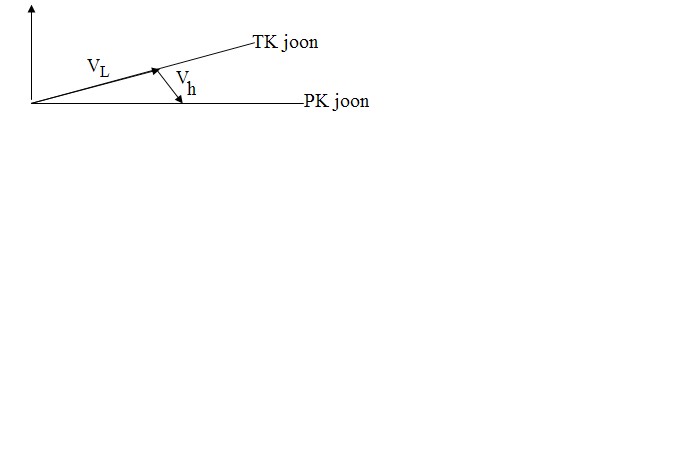
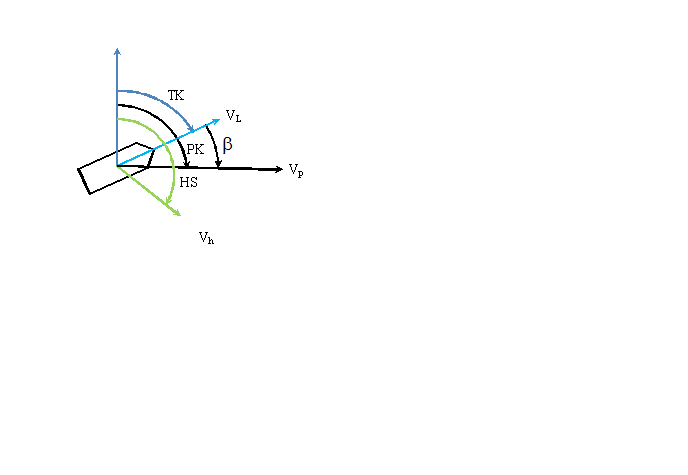
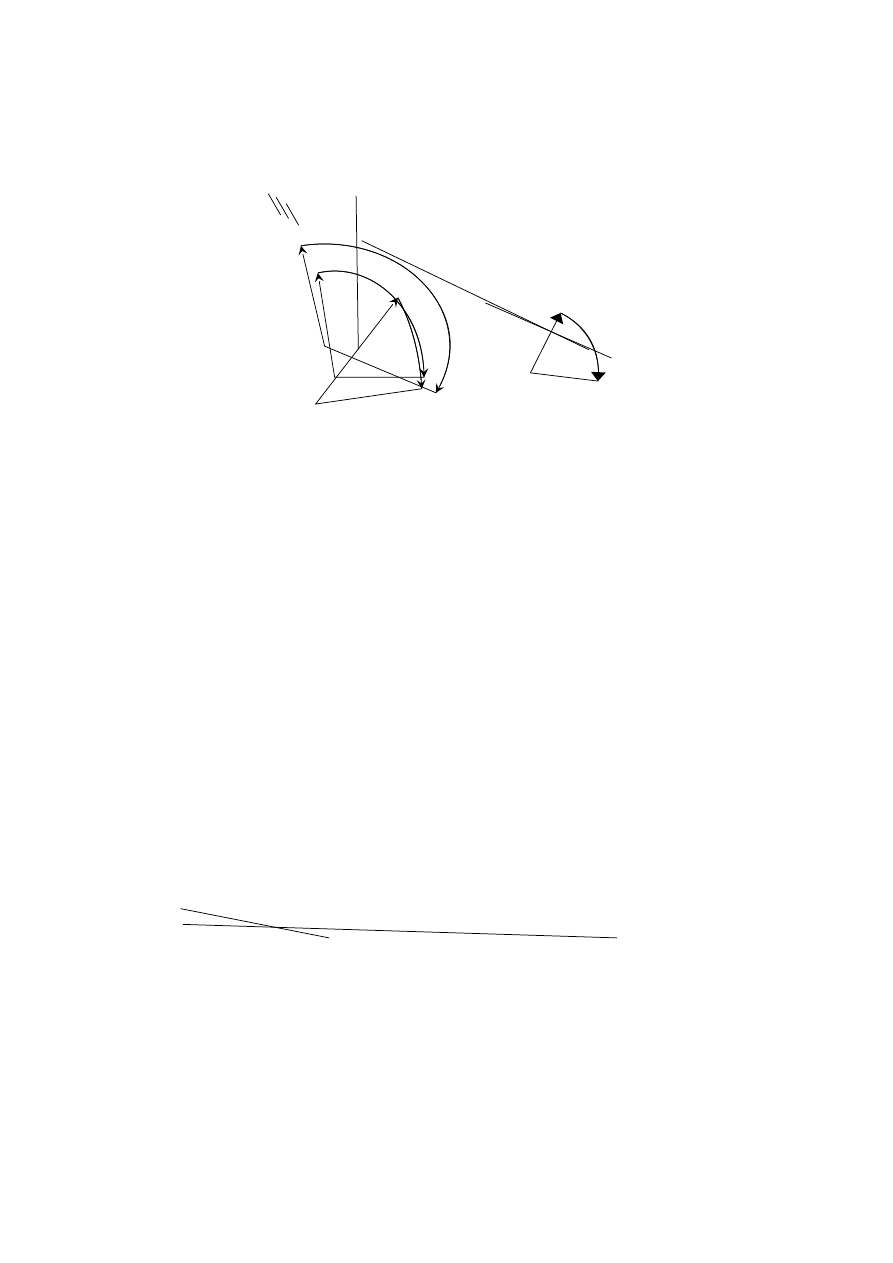
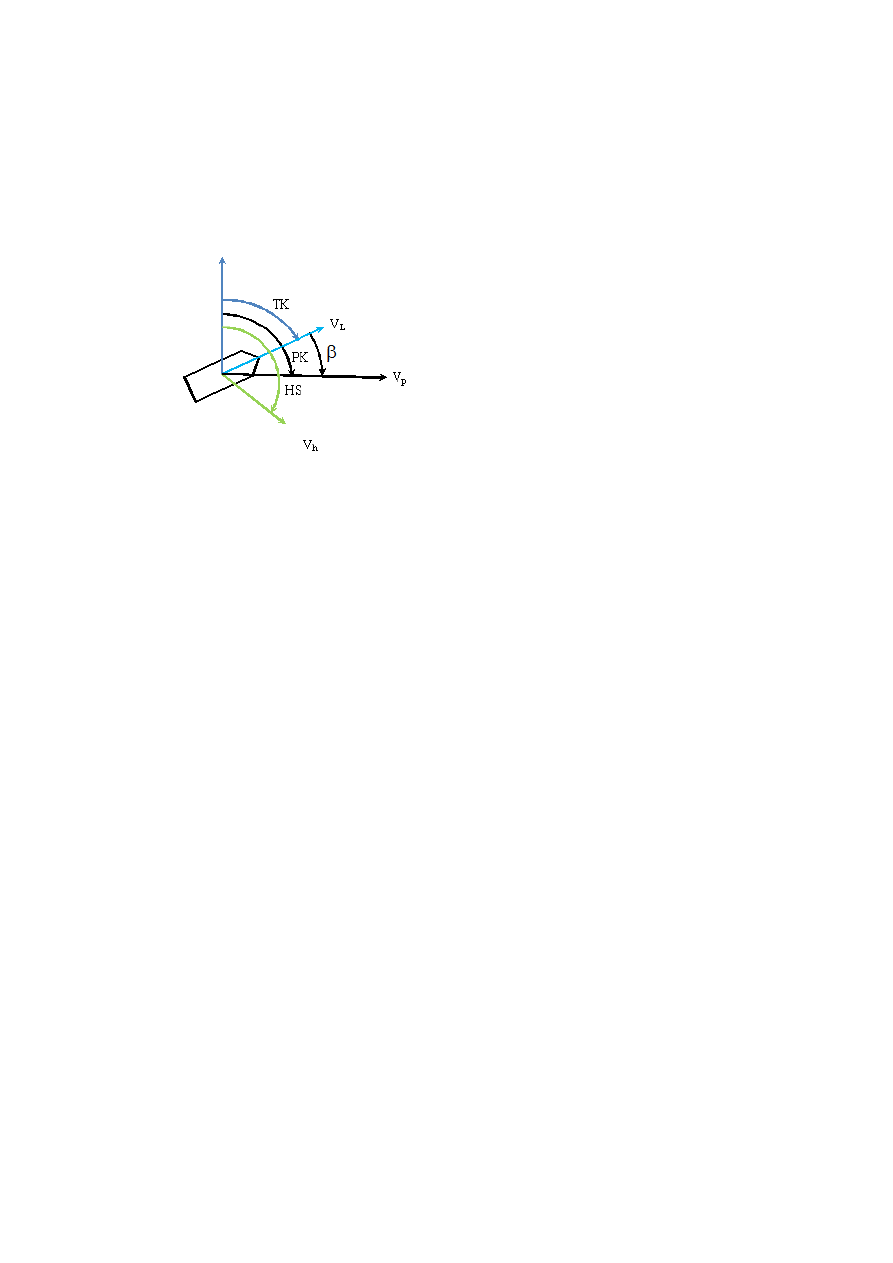
Sõit hoovuses
Vaatleme püsihoovuses liikuvat laeva. Kruvi tõukejõud annab
laevale kiiruse vL. Oletame, et laeva ümbritsev vee mass liigub
kiirusega vh suunas HS. Vektorite vh ja vL geomeetrilise summa
vektor vp annab laeva liikumise suuna merepõhja suhtes. Kui
laeva ja hoovuse kiirus on püsivad suurused, on ka nende
vektorite resultant püsiv suurus ja laev liigub edasi vektori vp
suunas. Laeva pikitasand aga
säilitab nagu triivigi puhul tõelise
kursi suuna. Nurka tõelise meridiaani põhjasuuna ja vektori vp
vahel nimetatakse põhjakursiks PK.
Nurka vektorite v ja vL vahel nimetatakse hoovuse
hälbenurgaks, mida tähistatakse kreeka tähega β.
Nagu nähtub jooniselt
PK = TK + β
Hoovuse hälbenurk võib olla positiivne või negatiivne sõltuvalt
sellest, kummasse pardasse hoovus on suunatud. Kui hoovus on
suunatud vasakpardasse, on hoovuse hälbenurk positiivne,
vastasel juhul negatiivne.
Kui laev sõidab hoovuses, tuleb tüürimehel lahendada kaht
tüüpi ülesandeid:
1. Teada on TK ja hoovuse elemendid. Tuleb leida PK,
hoovuse hälbenurk ja põhjakiirus
2. Teada on PK ja hoovuse elemendid. Tuleb leida TK,
hoovuse hälbenurk ja põhjakiirus.
Mõlemad ülesanded on lahendatavad nii graafiliselt kui
analüütiliselt.
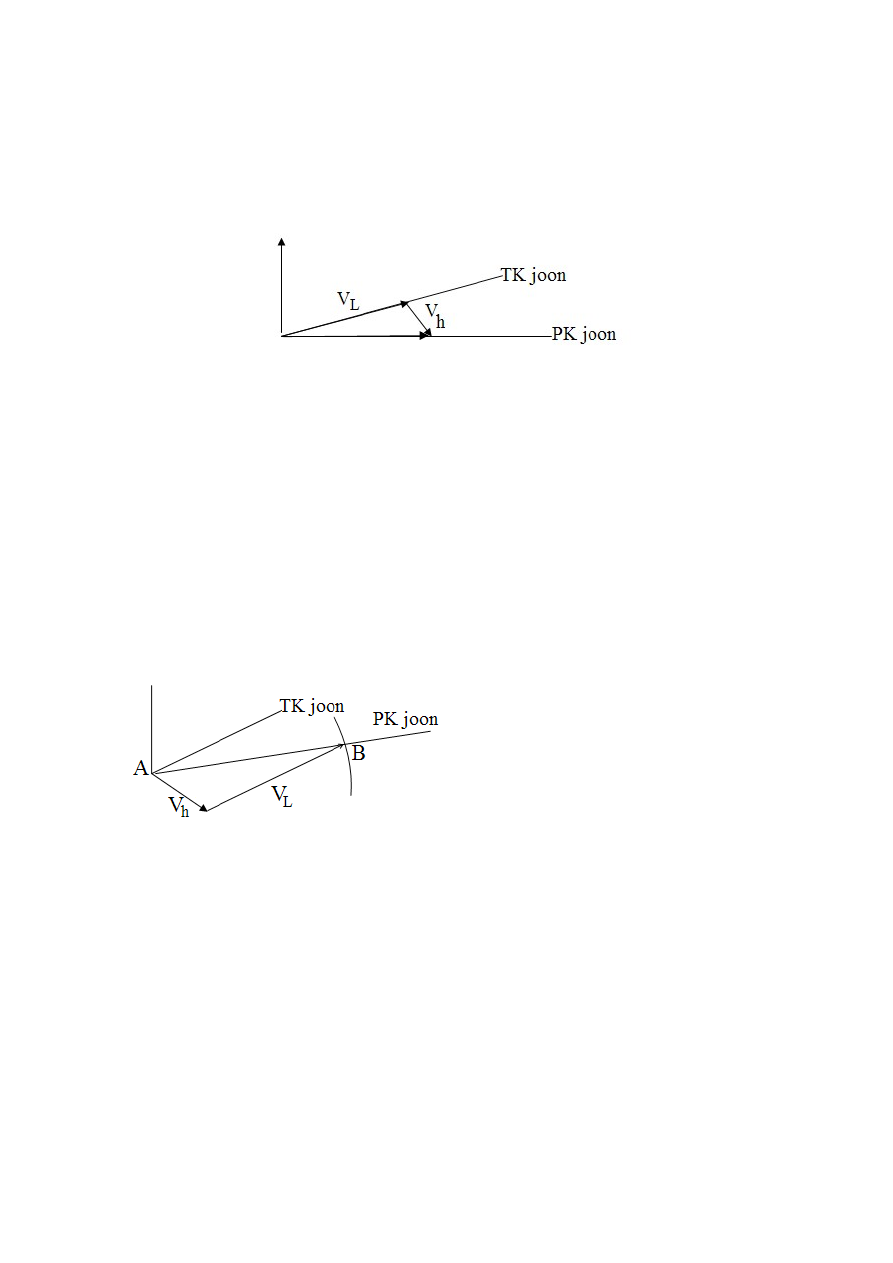
Põhjakursi graafiline määramine
Esimest tüüpi ülesande lahendamiseks kantakse kaardile
alguspunktist tõelise kursi joon ja sellele kantakse – samuti
alguspunktist – laeva kiiruse vektor vL kaardi mõõtkavas (joonis
4.12). Harilikult võetakse vektori pikkuseks poole või ühe tunni
jooksul läbitav miilide arv. Vektori vL tipust kantakse kaardile
hoovuse vektor vh. Ühendades vektori vL alguse vektori vh
lõpuga, saame põhjakursi. Põhjakursi ja tõelise kursi vahe
annab hoovuse hälbenurga, vektori vp pikkus aga põhjakiiruse.
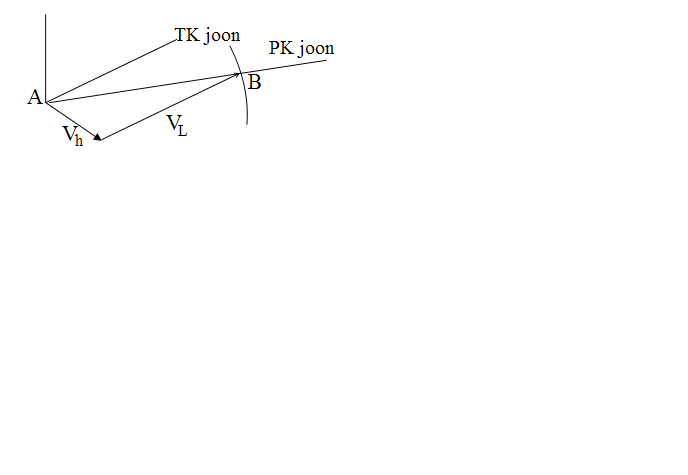
Tõelise kursi graafiline määramine
Teist tüüpi ülesande lahendamiseks (vt joonit)kantakse
kaardile alguspunktist A põhjakurss. Samast punktist kantakse
kaardile hoovuse vektor vh. Sirkli haarade vahele võetakse
laeva kiirusvektor vL ja hoovuse vektori lõpust joonestatakse
kaar, mis punktis B lõikab põhjakursi joont. Rööpjoonlauaga
ühendatakse hoovuse vektor vh lõpp-punktiga B. Saadud sirge
viiakse rööpjoonlaua abil punkti A. Ülekantud sirge ongi tõeline
kurss, mille suurus mõõdetakse malliga. Hoovuse hälbenurk
arvutatakse valemi β = PK – TK järgi.
Lõik AB annab laeva põhjakiiruse.
Hoovuse arvestamise vormistamine kaardil
Põhjakursi joone kohale kirjutatakse kompassikurss koos
kompassiõiendi ja hoovuse hälbenurgaga. Nii kompassiõiendi
kui hoovuse hälbenurga arvulised väärtused kirjutatakse
kaardile koos märgiga. Vastu- või pärihoovuse puhul märgitakse
β = 0°.
Navigatsioonikolmnurk ehitatakse iga kursi lähtepunkti juurde.
Igast arvutuse aluseks võetud laeva asukohast tõmmatakse
kaardile põhja- ja tõelise kursi joon. Kui laev muudab kurssi või
kiirust või kui muutuvad hoovuse elemendid, ehitatakse uus
navigatsioonikolmnurk.
Igale punktile põhjakursi joonel peab vastama teatud punkt
tõelise kursi joonel. Arvutatud kohtade juurde põhjakursi joonel
kirjutatakse kellaaeg ja loginäit, vastavate punktide juurde
tõelisel kursil aga ainult loginäit.
22. Triivi ja hoovuse üheaegne arvestamine.
Kui sõiduga hoovuses kaasneb tugev tuul, siis samaaegselt
hoovusega tuleb arvesse võtta ka tuult. Hoovuse ja triivi
samaaegsel arvestamisel tuleb lahendada kaht liiki ülesannet:
Kaardikursi ja põhjakiiruse
Tõelise kursi arvutus
Kui on teada tõeline kurss TK, laeva kiirus, siis võetakse esmalt
arvesse triiv, seejärel hoovus.
Lähtepunktist kantakse kaardile 2..6 cm pikkuse lõiguga tõelise
kursi joon samast punktist kantakse kaardile kaardikurss.
Navigatsiooni kolmnurk ehitatakse tuntud hoovuse elementide
abil kaardikursile
TK
Vh
VL
Krk
PK
PK
Krk
TK
α β
Tõelise kursi arvutus
Eeldades, et laev liigub mööda põhjakurssi ja meil on teada
laeva kiirus vee suhtes, hoovuse vektor ja triiv määratakse
tõeline kurss. Esiteks konstrueeritakse navigatsioonikolmnurk
ja siis võetakse arvesse triiv
Lähtepunktist A tõmmatakse laeva tõelise liikumise suund PK,
samast punktist A tõmmatakse sobivas mastaabis hoovuse
vektor, mille otsast sirklisse võetud laeva kiirsega v L tehakse
märge põhjakursile. Laeva kiiruse vektorile tõmmatakse punktis
A paralleelne sirge, mis annab kaardikursi
Seejärel arvutakse Tõeline kurss TK =KrK-α
23. Laevatee analüütiline arvutus. Liht-, koond- ja
keeruline arvutus.
Laeva tee graafiline arvutus asendatakse analüütilise
arvutusega avamerel, ookeanide ületamisel. Laeva
geograafiliste koordinaatide väljaarvutamist kursi K ja läbitud
tee S järgi nimetatakse analüütiliseks arvutuseks. Oletame, et
A
K
S
A(φ1,
. λ1)
B ((φ2,
. λ2)
LV
kaugenemine
C
laev väljus punktist A koordinaatidega φ1,
. λ1 kursiga K, läbis
vahemaa S. Arvutada lõppkoordinaadid φ2 , ,
. λ2
Kaugenemine näitab laeva liikumist mööda paralleeli ja
väljendatakse meremiilides. Kaugenemise märk määratakse
cosK järgi, kurssidel NE j NW on LV märk positiivne kurssidel NE
ja NW negatiivne
Täisnurksest kolmnurgast saame järgmised seosed
LV = S cosK kaug = SsinK , kaugenemine arvutatakse
keskmise laiuse järgi φ
k=
φ
1+ φ
2
2
Vaadeldud arvutust nimetatakse lihtarvutuseks
Näide Laev väljus punktist koordinaatidega φ1 =42°15’ N
λ1=51°23W kursiga TK =38° ja läbis 134 miili. Määrata W kursiga TK =3W kursiga TK =38° ja läbis 134 miili. Määrata 8° ja läbis 13W kursiga TK =38° ja läbis 134 miili. Määrata 4 miili. Määrata
sihtpunkti koordinaadid kui
ΔhΚrΚ= +3W kursiga TK =38° ja läbis 134 miili. Määrata °
Arvutust on mugav teha tabeli vormis
KK
ΔhΚrΚ
TK
S
Δhφ
Kaug
3W kursiga TK =38° ja läbis 134 miili. Määrata 8
+3W kursiga TK =38° ja läbis 134 miili. Määrata
41
13W kursiga TK =38° ja läbis 134 miili. Määrata 4
101,1
87,3W kursiga TK =38° ja läbis 134 miili. Määrata
LV= 13W kursiga TK =38° ja läbis 134 miili. Määrata 4*cos 41 = 13W kursiga TK =38° ja läbis 134 miili. Määrata 4*0,75471 = 1°41,1
φ2=42°15´+1° 41,1=43°56,1 KAUG= 13W kursiga TK =38° ja läbis 134 miili. Määrata 4*0,65606 = 87,9
φκ = 42,4+0,8 = 43W kursiga TK =38° ja läbis 134 miili. Määrata ,2 PV= 87.9/0,683W kursiga TK =38° ja läbis 134 miili. Määrata =128,7
λ2 =-51°23W kursiga TK =38° ja läbis 134 miili. Määrata ´+2°00,6
-49°22,4
Koondarvutus
Sihtpunkti geograafilist koordinaaride arvutust laeva sõidul
lähtepunkist mitmel erikursil nimetatakse koondarvutuseks,
koondarvutuse puhul tuleb eraldi arvutada laiuste vahe summa,
mida nimetatakse laiuste üldvaheks (LÜV)
Analüütilise koondarvutuse tabel
Kursid
Sõit
LV
Kaug
TK
Triiv
KrK
Laiuste jaoks üle 60° kasutatakse analüütilist keerulist
koondarvutust, kus iga kursi jaoks tuleb välja arvutada pikkuste
vahe
Analüütilise keerulise koondarvutuse tabel
Laius
TK
S
Δh φ
Kaug
Δhλ
Analüütilise arvutuse teel saadud koha täpsus sõltub nagu
graafiliselt saadud koha täpsuski kursi j vahemaa keskmisest
ruutveast.
24. Laeva asukoha visuaalne määramine. Asu -ja
samajooned .Laeva asukoha täpsuse hindamine.
Keskmine ruutviga.
Kui täpselt me ka ei peaks laeva asukoha kas graafilist või
analüütilist arvestust, pole niimoodi võimalik tagada laevasõidu
ohutust, sest kompassi- ja logiparandid pole täpsed, veelgi
ebatäpsemad on andmed hoovuste suuna ja kiiruse kohta. Ka
triivi suurust ei õnnestu meil kasutuses olevate meetoditega
täpselt määrata. Nimetatud mõjurite tõttu ei lange laeva
arvutatud koht kokku tema tegeliku asukohaga. Laeva asukoha
täpsustamiseks tuleb kasutada kaardile märgitud orientiire
(tuletorne, tulepaake, päevamärke, tehaste korstnaid,
telesaatjate antenne). Laeva asukoha määramist
kaldaorientiiride järgi nimetatakse observeerimiseks ja
observeerimise tulemusena saadud kohta observeeritud
kohaks. Kõik kaldaorientiiride järgi laeva asukoha määramise
viisid põhinevad kahe suuruse – nurkade ja kauguste
mõõtmisel.
Sama- ja asujooned
Kaldaorientiiride järgi laeva asukoha määramiseks mõõdetavaid
suundi ja kaugusi nimetatakse navigatsioonilisteks
parameetriteks. Punktide geomeetrilist kohta, mis vastab
navigatsioonilise parameetri püsiväärtusele, nimetatakse
navigatsiooniliseks samajooneks. Kaldalähedasel meresõidul
kasutatakse järgmisi navigatsioonilisi parameetreid: peilinguid,
rõht-, püstnurki, kaugusi. Teeme kindlaks, millised on nende
parameetrite samajooned.
Peilingu samajoon Kauguse samajoon
Rõhtnurga samajoon
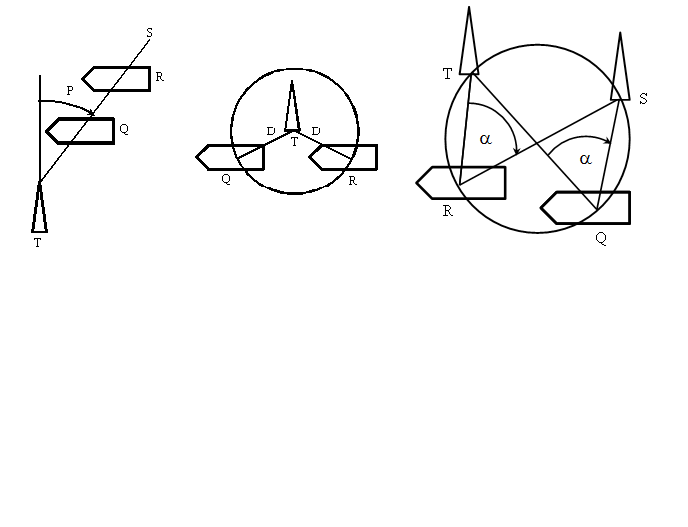
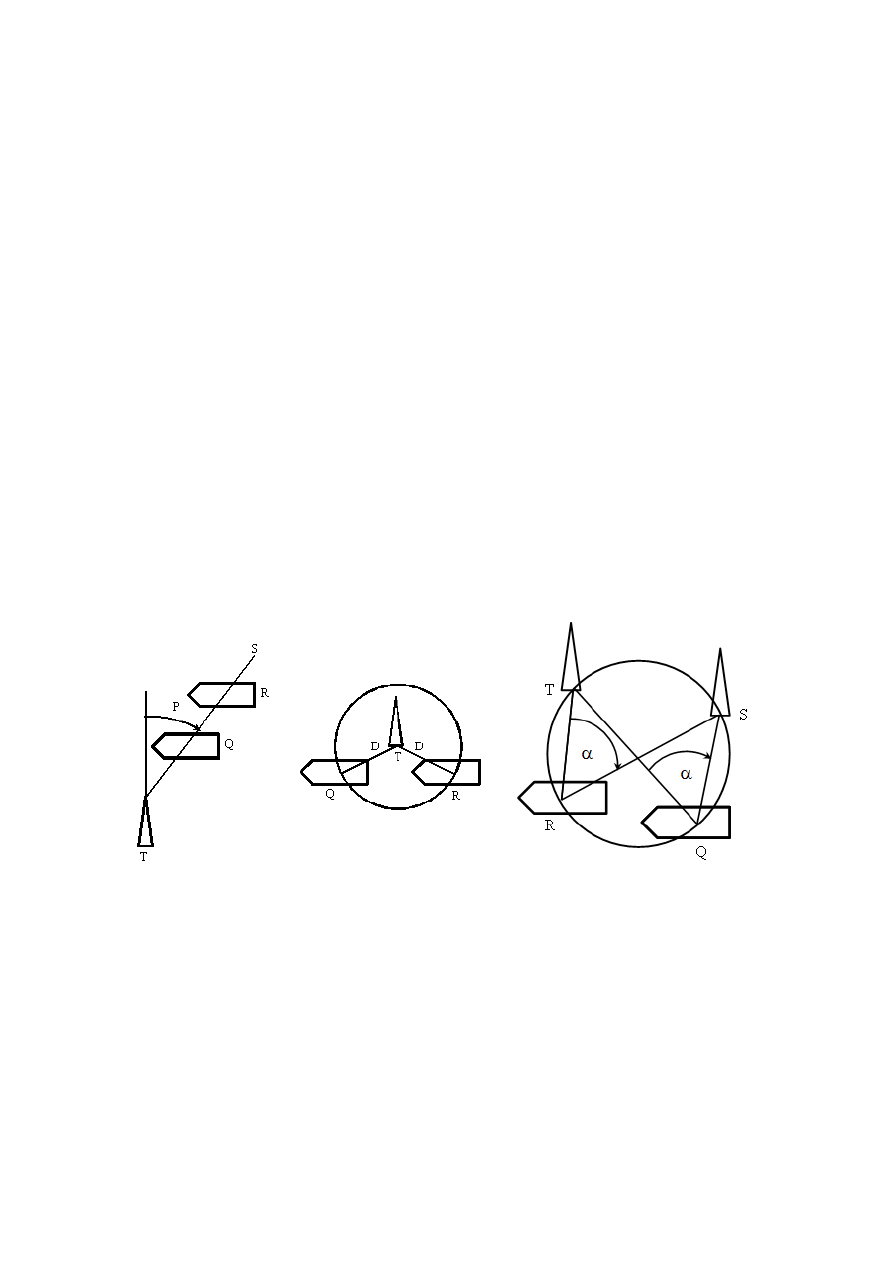
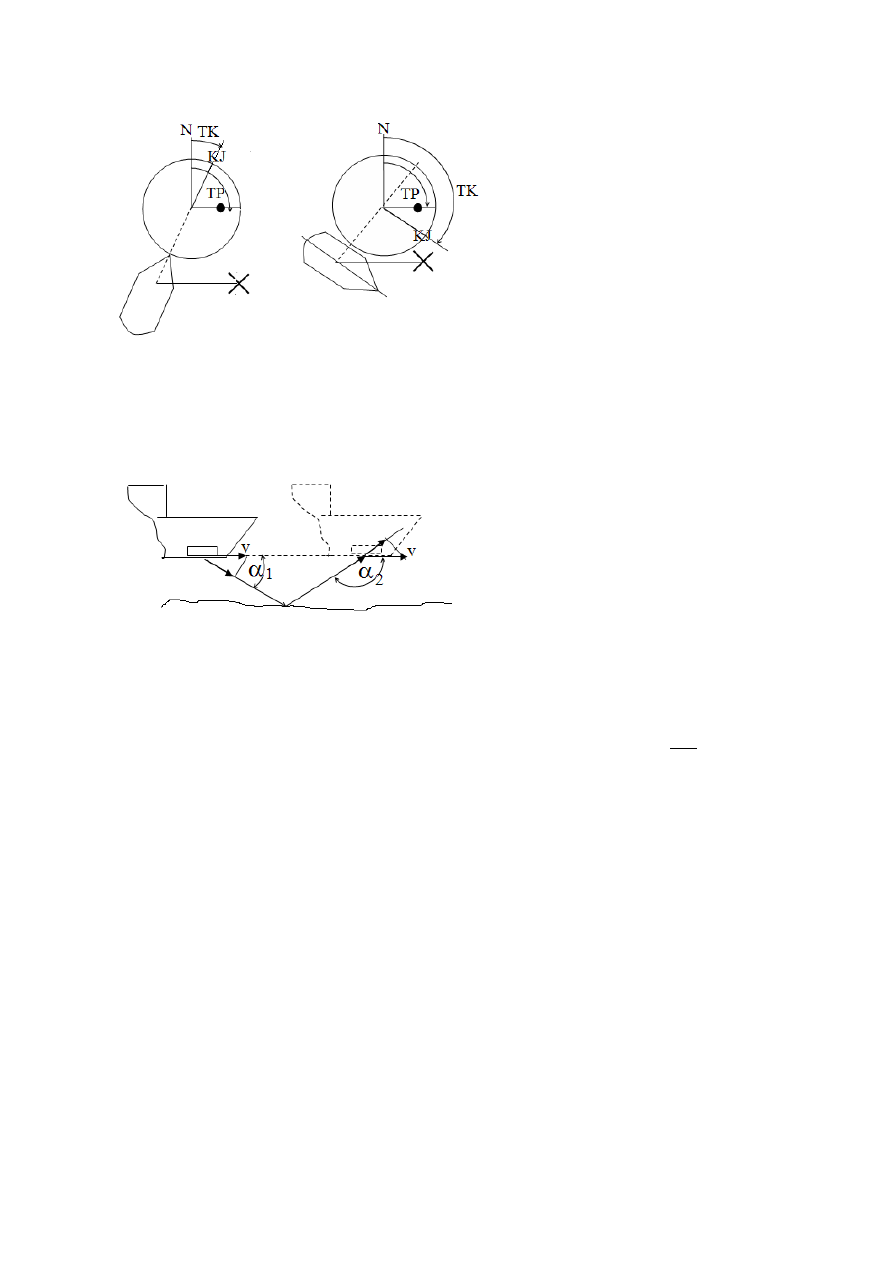
Peiling
Oletame, et laevalt mõõdeti orientiiri T peilinguks P. Kui
kanname saadud peilingu kaardile, võime kinnitada, et laev
asus peilingu võtmise hetkel kaardile kantud peilingu joonel,
sest vastasel korral poleks peilingu väärtus olnud
P. Meil pole
aga teada, millises punktis peilingu joonel laevad R, Q asuvad.
Sirge TS, mis vastab tingimusele TP = P, ongi peilingu samajoon
(joonis 6.1).
Kaugus
Mõõdeti kaugus D objektini T. On ilmne, et laevad R Q asuvad
ringjoonel raadiusega D, mille keskpunktiks on objekt T.
Kauguse samajooneks on seega ringjoon (joonis 6.2).
Rõhtnurk
Laeval mõõdeti objektide T ja S vaheline rõhtnurk α. Selle nurga
tipp asub ringjoonel, mis läbib punkte T, S ja laevade R Q
asukohta. Rõhtnurga samajoon on ringjoon (joonis 6.3W kursiga TK =38° ja läbis 134 miili. Määrata ).
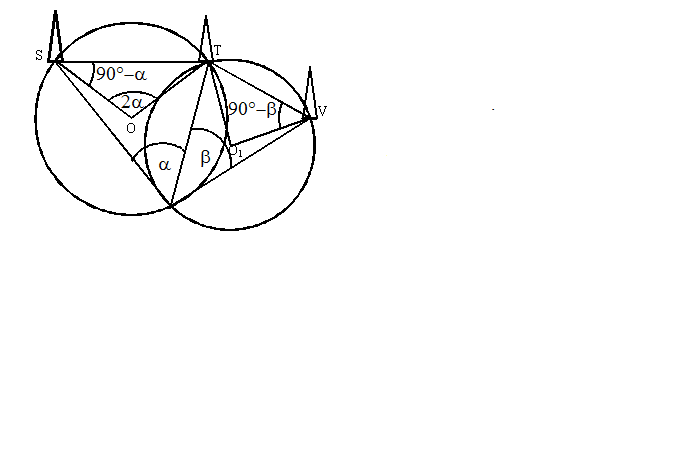
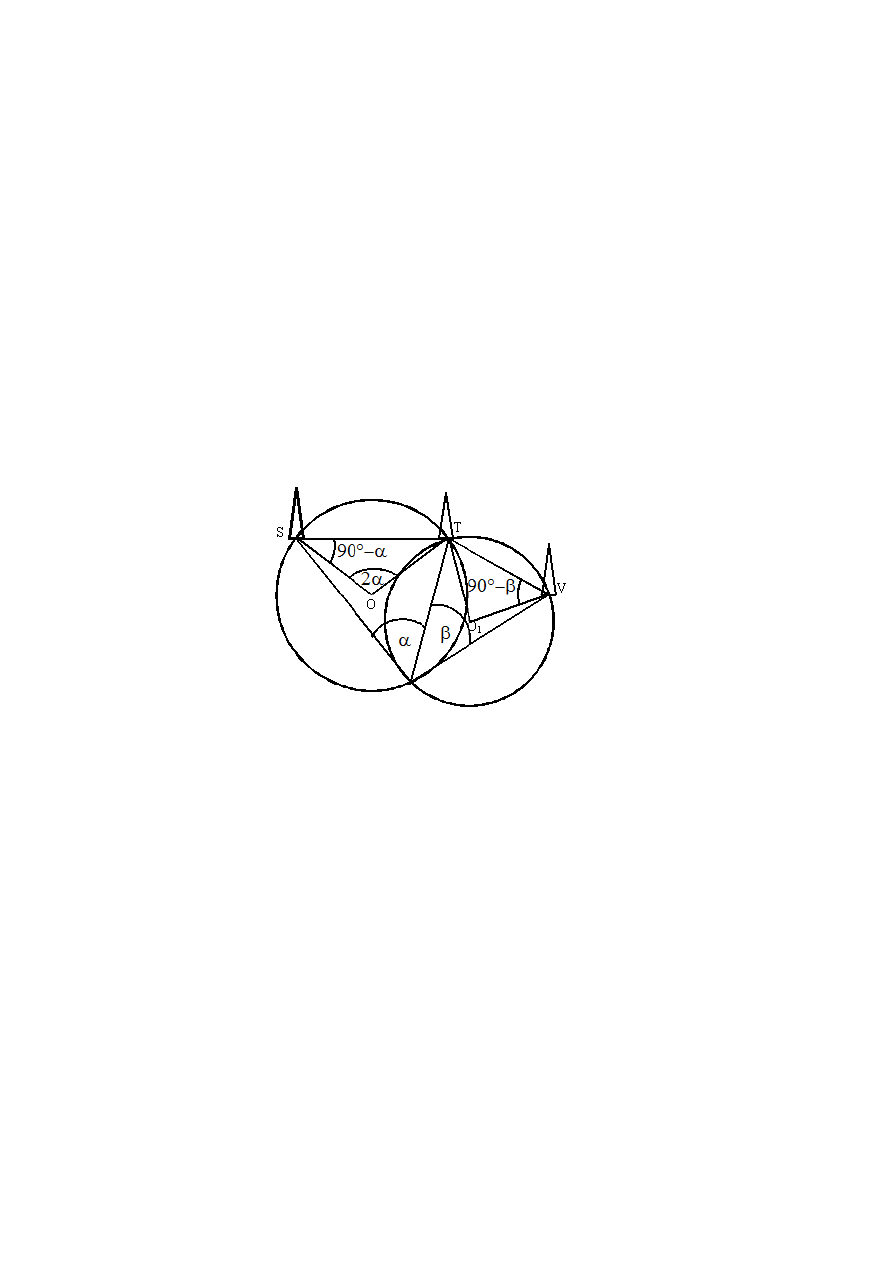
25. Laeva asukoha määramine kahe rõhtnurga abil.
Kui nurgad α ja β on mõõdetud taanduv ülesanne ringide
keskpunkti leidmisele. Oletame, et keskpunkti on leitud.
Jooniselt on näha piirdenurk α ja kesknurk 2 α. Geomeetriast
on teada, et samale kaarele toetuvate piirde ja keskuriga suhe
on üks kahele. Leidmaks ringjoone keskpunkti tuleb orientiire
ühendavale sirgele orinetiiri S ja T juurde ehitada nurk 90°-α.
Kui ehitada sirgele ST keskritsirge, piisab ühest nurgast 90°-α.
Samamoodi leitakse ka teise ringjoone keskpunkt. Koha
kaardile kandmiseks tuleb kasutada protraktorit või kalkat,
millele joonistatakse nügad α ja β
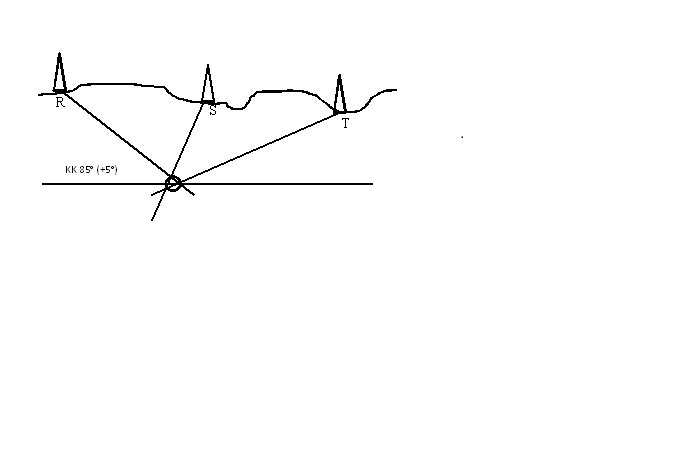
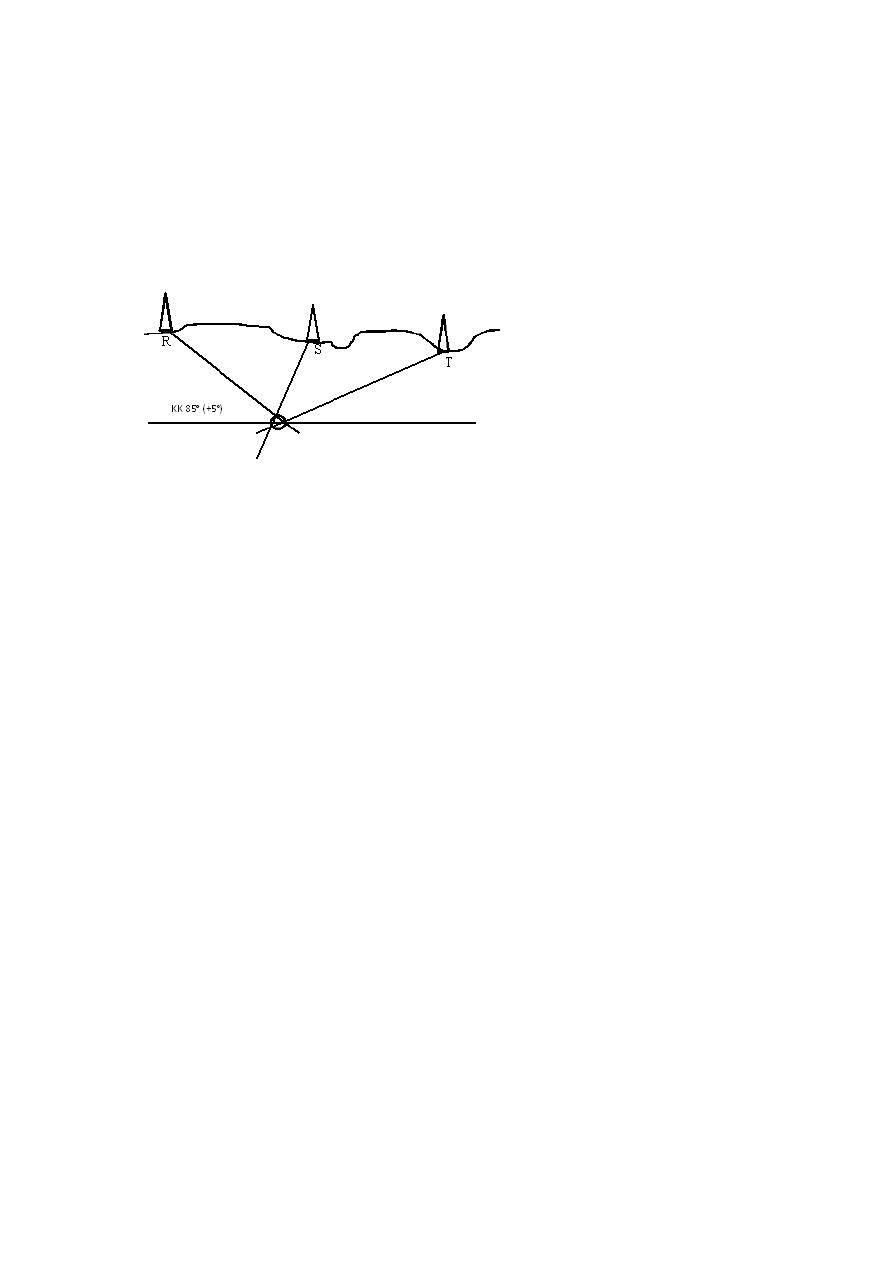
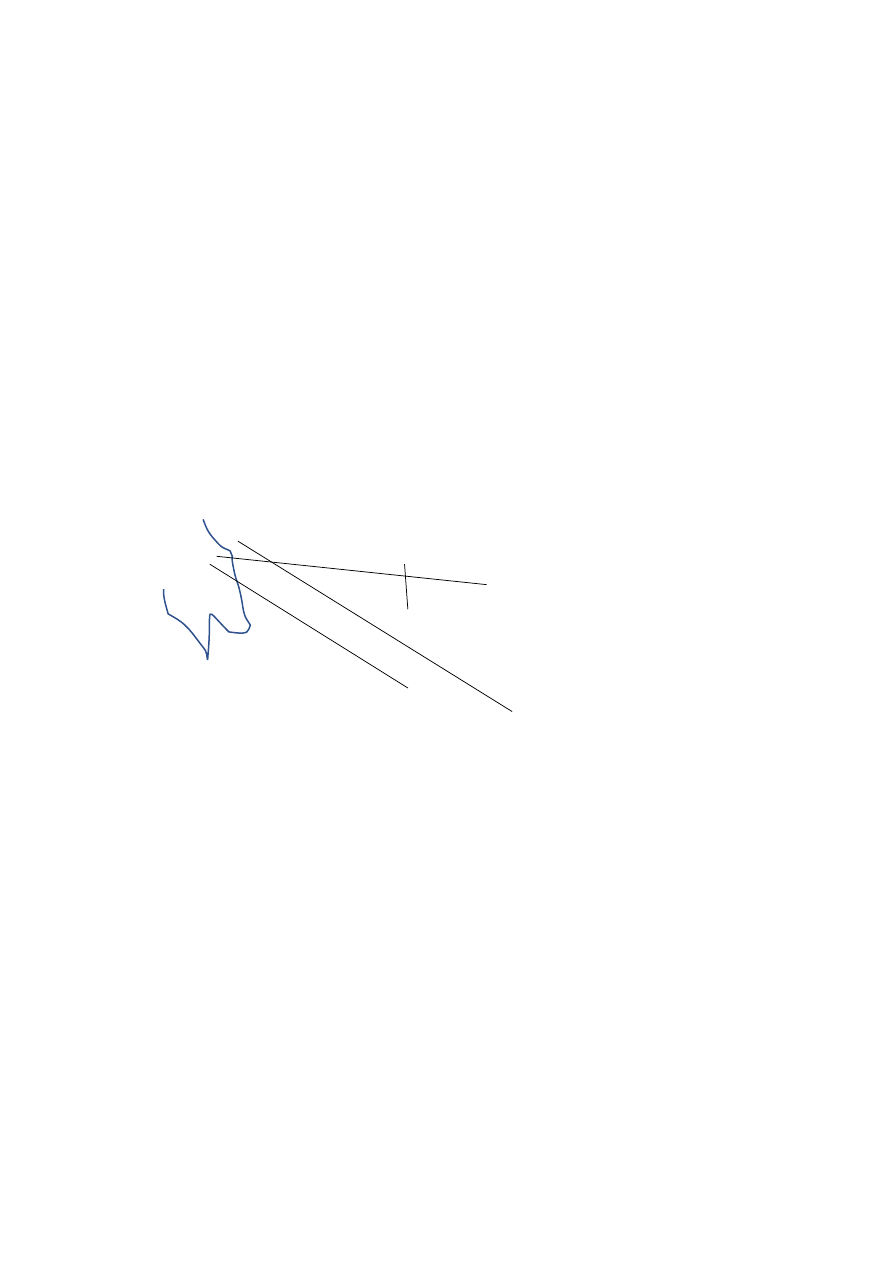
26. Laeva asukoha määramine kolme peilingu järgi.
Kolme peilingu järgi laeva asukoha määramiseks võetakse üksteise järel kiiresti kolme
orientiiri peilingud, õiendatakse kompassiõiendiga ja kantakse kaardile.. Peilingute lõikepunkt
annab laeva observeeritud asukoha. Reeglina ei lõiku aga kõik kolm peilingut ühes punktis.
Põhjuseks on vaatluste süstemaatilised ja juhuslikud vead. Vigade mõju vähendamiseks tuleb
peilingud võtta kindlas järjekorras. Esimestena peilitakse orientiire, mis asuvad kiilu sihi
lähedal, sest nende peilingud muutuvad aeglaselt. Viimasena peilitakse orientiiri, mis asub
traaversi lähedal ja mille peiling muutub kõige kiiremini (joonis6.14). Viimase orientiiri
peilimise hetkel märgitakse aeg ja loginäit.
28. Laeva asukoha määramine kahe peilingu järgi.
Peilingute taandamine ühele ajahetkele.
Laeva asukoha määramise enimlevinud viis on asukoha
määramine kahe peilingu järgi, sest enamikul juhtudel on
meresõitjal käepärast kaks orientiiri.
Laeva asukoha määramisel kahe peilingu järgi võetakse kahe
nähtavuses oleva orientiiri peilingud, õiendatakse
kompassiõiendiga ja kantakse kaardile tõelised peilingud.
Peilingute lõikepunkt annab laeva asukoha.
Meetodi põhiline puudus on võimatus kontrollida saadud
asukoha õigsust. Seepärast tuleb saadud asukohta hoolikalt
analüüsida.
Vähendamaks viga laeva asukohas, mis tekib seetõttu, et
peilingud võetakse eri hetkedel, peilitakse orientiire kindlas
järjekorras Esimesena peilitakse pikitasandi lähedal asuvat
orientiiri, viimasena traaversi lähedal asuvat orientiiri
S
T
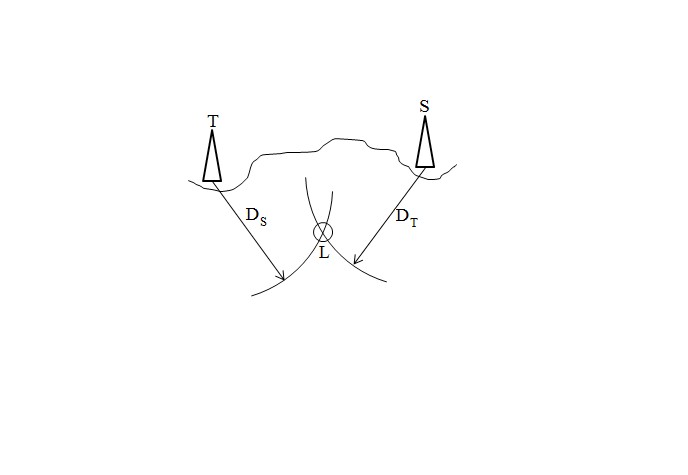
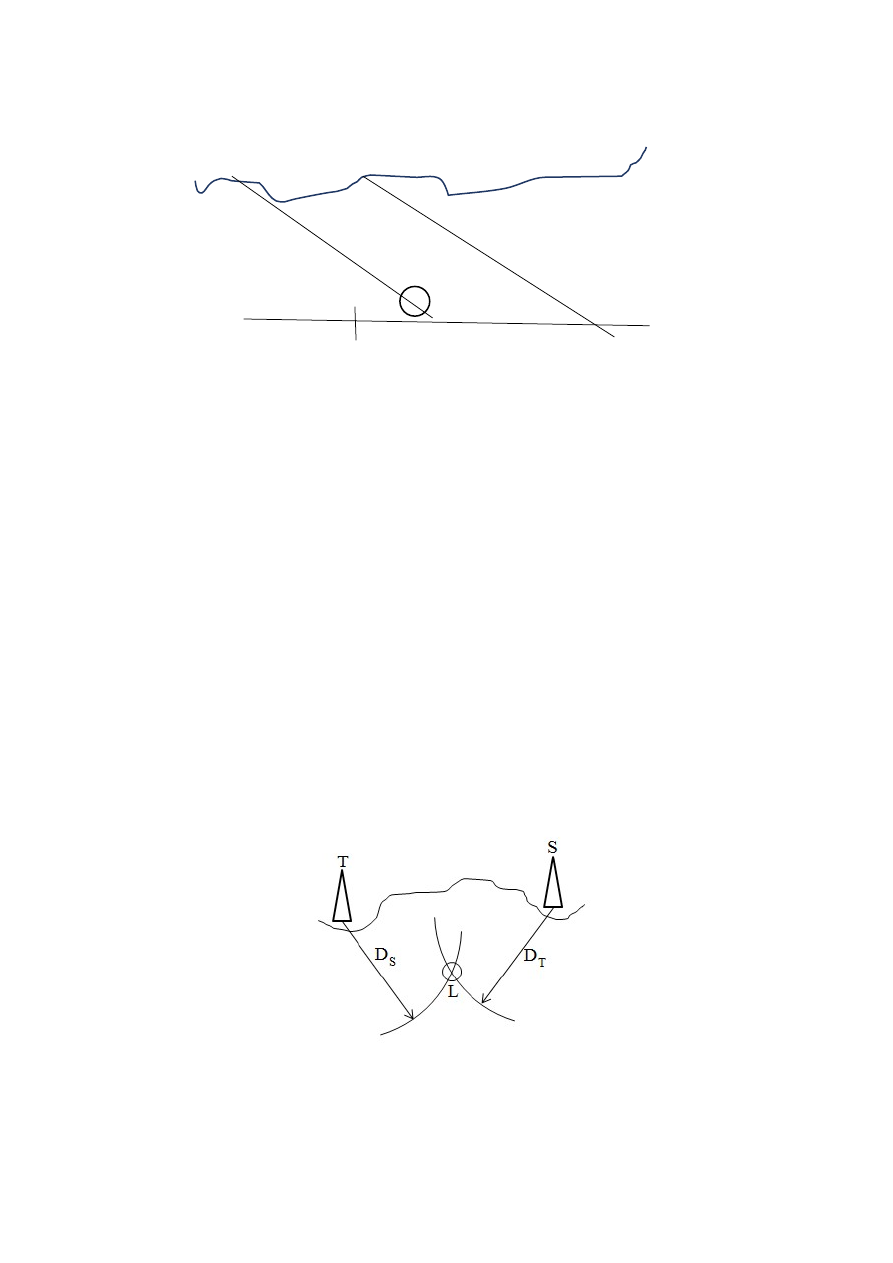
29. Laeva asukoha määramine kauguste abil.
Selleks tuleb mõõta laevalt kaugus kahe või kolme orientiirini (joonis 6.22) .
Seejärel tõmmatakse kaardile, keskpunktiga orientiiris, ringjoon raadiusega, mis
on võrdne mõõdetud kaugusega. Mõõtnud kauguse DT orientiirini T, joonistame
kaardile ringjoone, mille raadius on võrdne DT. Pärast kauguse DS mõõtmist
teise orientiirini S saame teise ringjoone raadiusega DS. Nende ringjoonte
lõikepunkt annab laeva observeeritud koha. Teise kauguse mõõtmise hetkel
märgitakse kellaaeg ja loginäit. Kauguste mõõtmiseks kasutatakse enamasti
radarit. Peamist tähelepanu laeva asukoha määramisel kauguste järgi tuleb
pöörata sobivate orientiiride leidmisele: need peavad olema ekraanil hästi
eraldatavad. Harilikult valitakse orientiirideks eraldiseisvad orientiirid: kaljused
neemed, eraldiseisvad ja radari ekraanil eristatavad väikesed laiud või kaljud.
Orientiiride valikul tuleb silmas pidada, et nendevaheline rõhtnurk jääks 30° ja
150°vahele. Esimesena mõõdetakse kaugus orientiirini, mis asub traaversi
lähedal.
30. Laeva asukoha määramine ühe objekti kahekordse
peilimisega
Kui nähtaval on ainult üks kaldaorientiir, ka siis on võimalik
määrata laeva asukohta
Ajahetkel T1 võetakse orientiiri peiling ja kirjutatakse üles. Laev
läbib vahemaa S ja ajahetkel T2 võetakse teine orinetiiri peiling
ja kantakse kaardile. Orientiiri juurest kantakse paralleelselt
kursijoonega kaardile läbitud vahemaa s ja vektori lõpust
kantakse kaardile esimene peiling,
Saadud koht tähistakse kolmnurgaga.
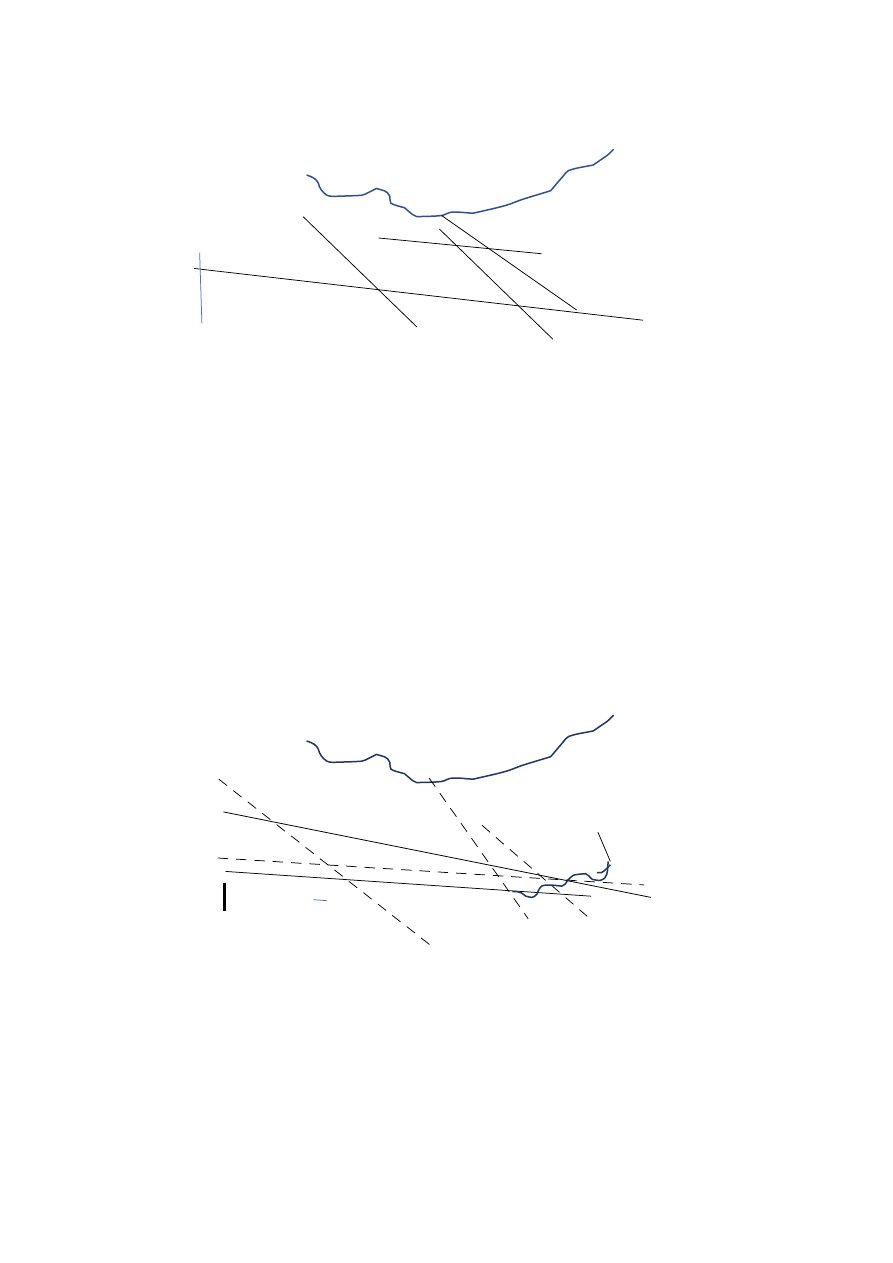
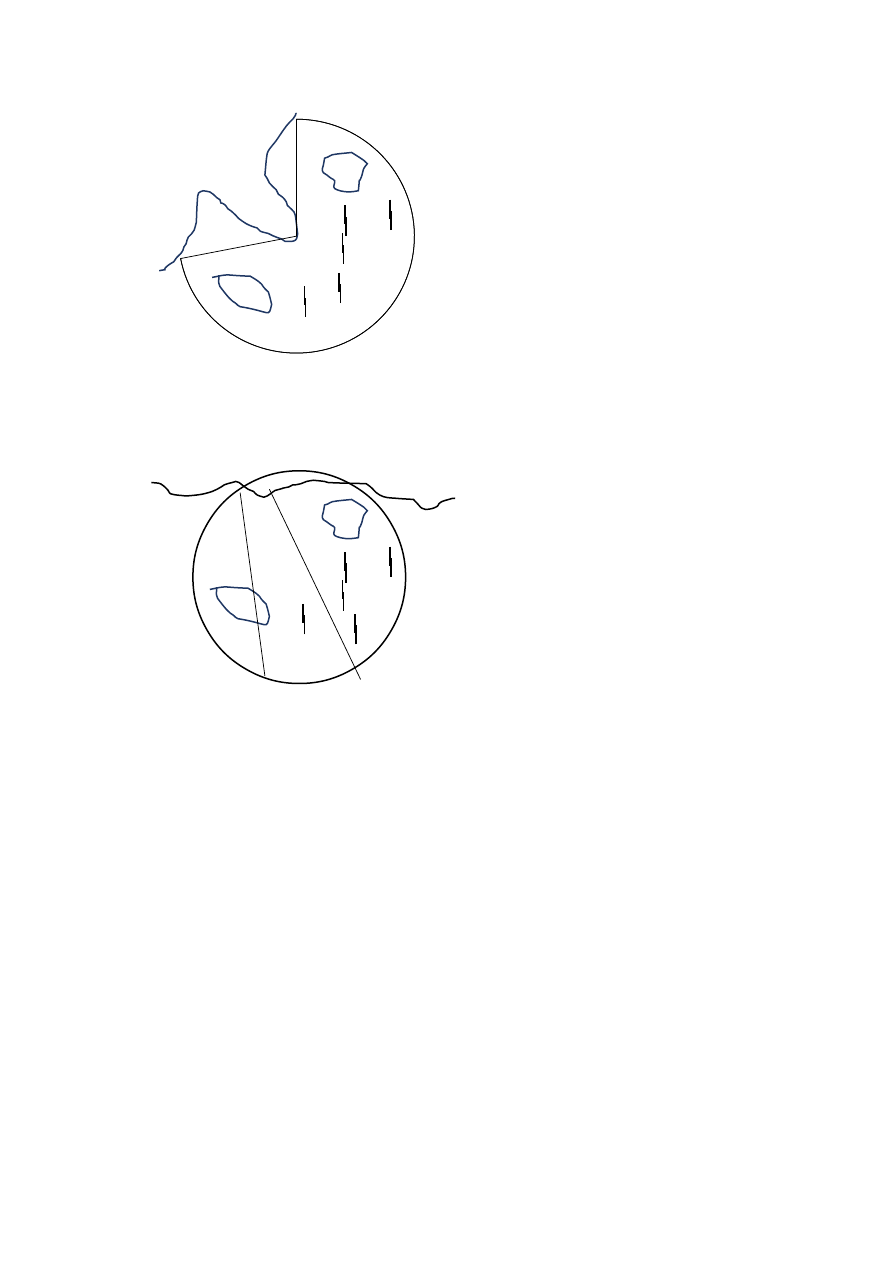
31. Ristpeilingu erijuhused.
Ristpeiling triiviga.
Laeva asukoha määramine juhul, kui laev triivib, erineb selle
poolest, et kahe peilingu vahelist laeva poolt läbitud teed Slg ei
mõõdeta mööda tõelist, vaid mööda kaardikurssi
Ristpeiling hoovusega.
Kui arvutus toimub mööda põhjakursijoont, siis esimese
peilinguükskõik millisest punktist mõõdetakse pöhjakursi
rööpsirgele ajavahemiku T2 – T1 jooksul läbitud te ning selle
sirge lõpust tõmmatakse esimese peilingu joon. Teise peilingu
lõikepunkt ülekantud esimese peilinguga ongi laeva arvutatud-
observeeritud koht
S
T
LN2
LN
T
T
PK
P1
Slg
P2
KK89° (0,5) β+4
P1
A
Vh
B
SLG
CC
F
K
m
M
Kui arvutus tehakse tõelise kursi joonel arvestatakse hoovuse
mõju hiljem, möõdetakse peilingutevahelise aja jooksul läbitud
tee Slg AB mööda tõelise kursi joont ning võetakse aluseks
esimese peilingu ja tõelise kursi lõikepunkt A punktist B
tõmmatakse hoovuse suunas sirge BC ning punktist A rõõpselt
põhjakursile, sirge AC
Nende sirgete lõikepunkti C kantakse üle esimene peiling.
Ülekantud esimese peiling ja teise peilingu lõikepunkt M annab
laeva arvutatud-observeeritud koha. Teise peilingu võtmise
hetkel määratakse laeva arvutatud koht F
Traaversi kauguse võte
Esimene peiling võetakse hetkel, mil see võrdub ühele
varemarvtatuist kompassipeilingutest ja moodustab kursinurga
vastavalt 45°, 63W kursiga TK =38° ja läbis 134 miili. Määrata °,5 või 71,°5 ning teine peiling hetkel kui
orientiir on traaversis. Esimesel ja teisel märgitakse kellaaeg ja
A
A´
F1
D2
Slg
D1
M
M1
F2
loginäit. Koha saamiseks mõõdetakse traaversi joonel kauguse
Slg, 2 Slg , 3W kursiga TK =38° ja läbis 134 miili. Määrata Slg.
Kahekordse nurga võte seisneb järgmises. Võetakse esimene
peiling, märgitakse kellaaeg ja loginäit ning arvutatakse
orientiiri kursinurk a. seejärel arvutatakse teise peilingu
niisugune et lugem, et kursinurk võrduks 2a. Teise vaatluse
hetkel märgitakse kellaaeg ja loginäit. Koha saamiseks
kantakse kaardile teine peiling ja mõõdetakse mööda seda
orientiirist kahe vaatluse vahel läbitud teele Slg võrdne kaugus,
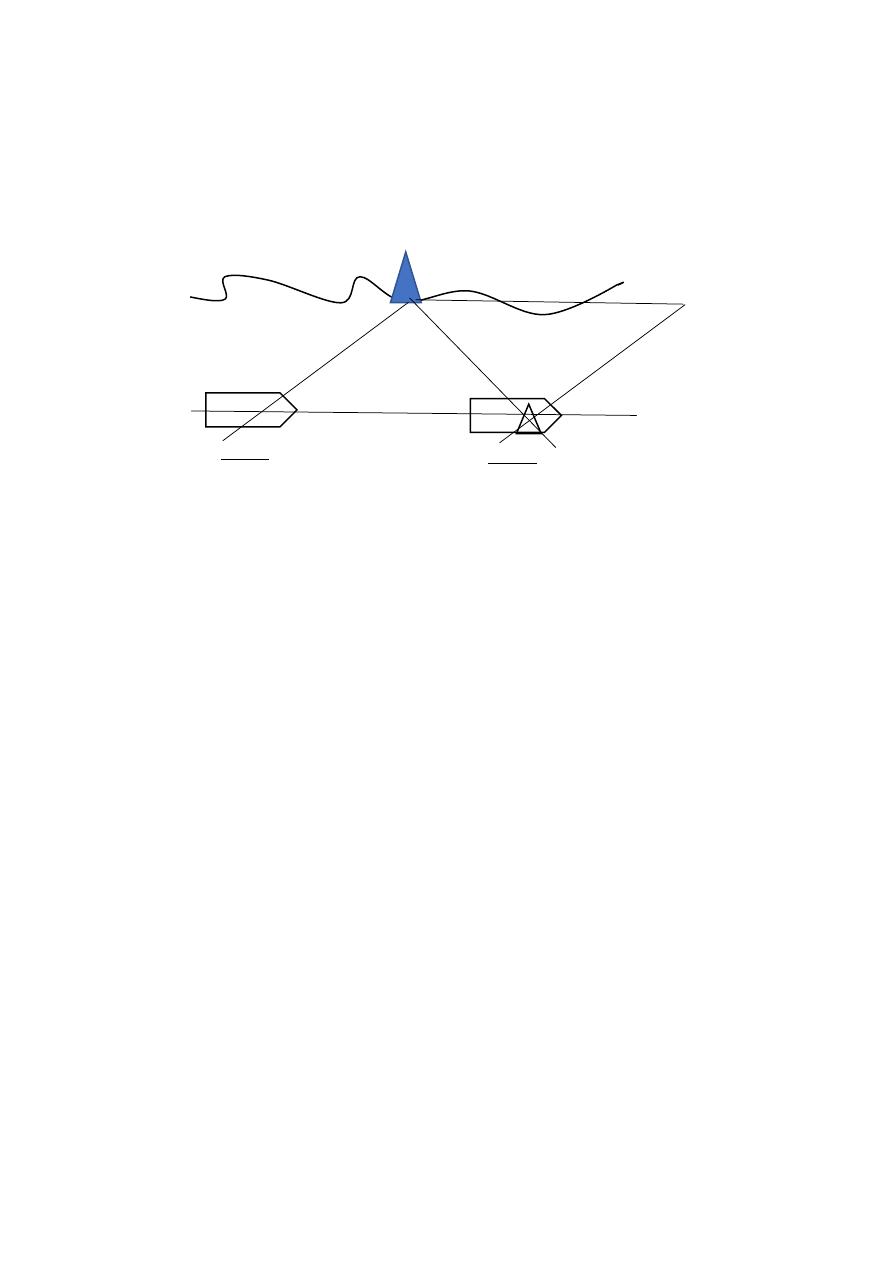
32. Laeva asukoha määramine ühe objekti kahe kauguse
järgi (ristkaugus).
Olgu MM1laeva tee.c punktis F1 mõõdeti radariga objekti A
kaugus D1. Mõne aja pärast mõõdeti objekti kaugus punktis F2
kaugus orientiirini D2. Kui laev asub punktis F2 saab laeva
kohamäärata kui kahe kaugusringi kui
kaugusringide D1 ja D2 lõikepunkti
33. Laeva asukoha määramine kombineeritud
meetoditega.
Meresõiduoludest sõltuvalt kasutatakse mõnikord laev asukoha
määramisekskombineerituid võtteid nagu kohamääramine
peilingu ja kauguse järgi, rõhtnurga ja kauguse järgi peilingu ja
sügavuse järgi
34. Laeva asukoha täpsustamine ühe peilingu abil.A
B
Arvutatud koht peilingu
Võtmise hetkel
Esimene peiling tuleb kohe kaardile kanda. Sest ta annab mingi
ettekujutuse laeva asukohast ja võimaluse kontrollida arvutatud
kohta, mis on meresõidu ohutuse tagamiseks küllaltki tähtis.
Kui kurss kaardil on küllalt tõenäoline, loetakse laev asuvaks a
ja esimese peilingu ja kursijoone lõikepunktis. Iga l juhu näitab
esimene peiling, kus asub laev arvestatud koha suhtes. Kui
kursi asetus kaardil ei osutu küllalt usaldusväärseks, siis
loetakse laeva asukohaks peilingujoone ja arvatud kohast
peilingule tõmmatud ristsirge lõikepunkti. Punktist A tuleb
kaardile kanda mõõtmiste aja vahel logi järgi läbitud vahemaa
S.
35. Radari kasutamine asukoha määramiseks.
Radarit saab koha määramiseks kasutada mitmel viisi. Kõige
täpsema koha annab peilingu ja kaugusega koha määramine,
sest peiling ja kaugusring on teineteisega ristil. Radari
kasutamise võimalused sõltuvad ümbruses asuvatest
orientiiridest ja nende kasutamisvõimalusest. Kui kurss on
rannajoonega paralleelne saab kasutada paralleeljooni
jälgimaks laeva ja rannajoone vahelist kaugust. Radariga saab
kohta määrata ühe orientiiri ja kaldajoone järgi, radariga
mõõdetud kauguse ja visuaalse peilingu järgi
36. IMO meresõidu täpsuse standardid (Resolutsioon
A.529).IMO täiskogu istung võttis 1983W kursiga TK =38° ja läbis 134 miili. Määrata . aastal vastu resolutsiooni 529
„Meresõidu täpsuse standardid”. Standard määrab nõuded
laeva asukoha täpsusele sõltuvalt kiirusest ja kaugusest lähima
meresõiduohuni, sõltumata kasutatavatest asukoha määramise
vahenditest ja meetoditest. Meresõiduohu all mõeldakse
kaardile kantud meresõidutakistusi ja meresõidukõlbmatuid
sügavusi ning ohtlike või meresõiduks suletud rajoonide piire.
Standard jaotab meresõidu sõiduks sadamates ja nende
läheduses, kaasa arvatud rajoonid, kus manööverdamine on
raskendatud.
Sadamates ja nende läheduses pole asukoha täpsus
normeeritud, vaid sõltub kohalikest oludest. Sõidul teistes
rajoonides kiirustel kuni 3W kursiga TK =38° ja läbis 134 miili. Määrata 0 sõlme peab laeva asukoht teada
olema täpsusega mitte üle 4% kaugusest lähima ohuni. Laeva
asukoha täpsust hinnatakse kujundiga, mis annab laeva
asukoha 95% tõenäosusega, arvestades süstemaatilisi ja
juhuslikke vigu.
37. Hoiatavad samajooned. Asujoonte abivõrgud.
Hoiatavaid asujooni kasutatakse keerukate navigatsiooni
piirkondades, sõidul kalda läheduses ning kitsuse läbimisel.
hoiatavad asujooned võimaldavad arvutuse süstemaatilist
kontrolli hoiatamaks laeva lähenemast ohtlikule kohale,
võimaldavad arvestada ohtlikest kohtadest mööda viivaid
kursse ja täpsustada hetke, mil ohtlikust kohast möödunud
laev võib kurssi muuta. Kaugust, rõhtnurka ja peilingut, mille
tatud väärtuse määrab mingi samajoon, nimetatakse vastavalt
ohtlikuks kauguseks, rõhtnurgaks või peilinguks. Hoiatavad või
ohtlikud samajooned valitakse võimaluse korral rööbiti laeva
kursiga. Hoiatav samajoon peab mööduma kaldaohtudest
piisaval kaugusel.
Ohtlik kaugusvõtet kasutatakse kui laev sõidab ümber
radariekraanil neeme
Ohtlik kaugus
Rõhtne ohunurk
38. Ohud merel, nende liigitus ja terminoloogia.
Meresõidul, kaldale lähenemisel, sadamasse sisenemisel ja
sadamast väljumisel raskendavad laevajuhtimist mitmesugused
navigatsioonilised ohud. Kõiki esinevaid ohte võib liigitada
alalisteks ja ajutisteks. Esimeste hulka kuuluvad merepõhja
reljeefiga seotud ohud ja uppunud laevad. Ajutisteks ohtudeks
võib liigitada meteoroloogilised tegurid tuul, lainetus jää.
Alalised ohud
Madalik -üldine meresõidu terminmandrimadala suured ja
väikesed kõrgendikud, kus sügavus on väiksem kui ümberringi.
Madalikke sügavusega alla 20 meetri loetakse meresõiduks
ohtlikuks
Baar ehk joom-madalik või madalike rida jõe suudmes
Kalju -eraldi asuv väikese pindalaga järsk kivine põhja
kõrgendik
Paljand-mõõna ajal paljanduv kaldaala
Vrakid- mille, osad ulatuvad üle veepinna, vrakid, mille koha on
vett vähem kui 18 meetrit
Hüdrometeoroloogilised ohud
Tugev tuul või torm
Tugev lainetus
Tugevad hoovuse
39. Meremeeste kohustused hüdrograafia organite
suhtes.
Meresõidul on laevajuht kohustatud pideval koguma andmeid
navigatsiooniolukorra muutustest. Navigatsiooniolude muutuste
kohta käivad ettekanded peavad sisaldama järgmisi teateid:
-tuletornide, meremärkide ja teiste navigatsiooniseadmete
rikkisolekust
-meresõidule ohtlike madalike, kaljude, kivide, uppunud
laevade, takistustuste avastamisest
Peale sell tuleb teatada kõigest, mis võib osutuda ohtlikuks
meresõidule
-juhtumeist, kus kaartide või käsiraamatute andmed erinevad
tõelistest
40. Kalda-ja meremärgid.Tuletornid.Tulepaagid.Poid ja
toodrid.41. Siht.Sihi tundlikkus.
42. IALA”A” regiooni
Kaardinaalsüsteem.Lateraalsüsteem.Eraldi asetseva ohu
märgis-
tus.Ohutu vee märgistus.Eriotstarbelised märgid.
43. Meresõitjaid teenindavad tugijaamad.
44. Kalda- ja meremärkide tulede karakteristikud.
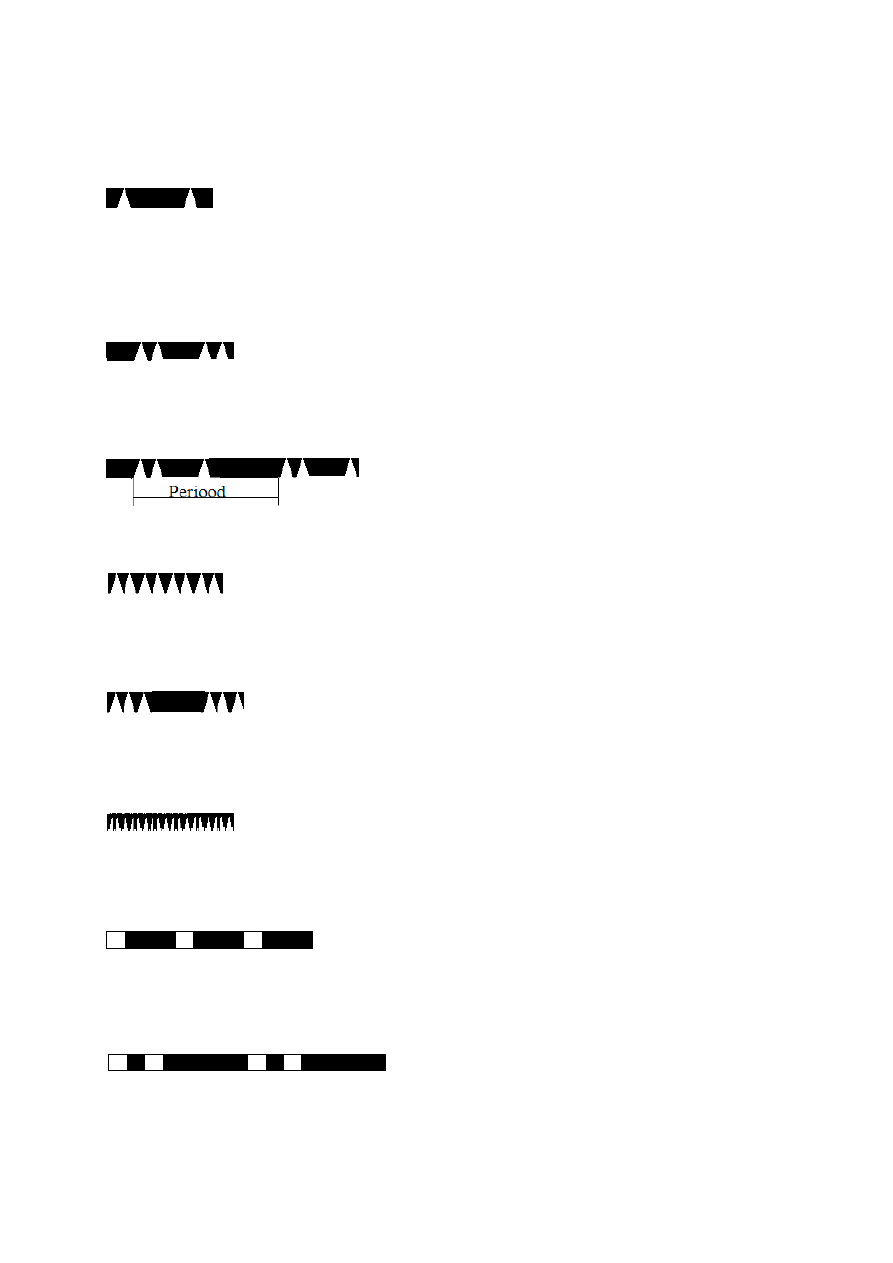
Püsituli (fixed light) – ühtlane pidev valgus
Varjutuv tuli (single occulting light, Oc n s). Pideva valguse lühiajalised, perioodiliselt
korduvad ühekordsed varjutused. Valguse kestus on pikem kui pimeduse kestus perioodide
vahel.
Koguvarjutuv tuli (group occulting light, Oc k n s). Üksteise järel kiiresti, n sekundi tagant
korduvate valguse varjutustega tuli.
Kombineeritud koguvarjutatav tuli (composite group occulting light; Oc (k + m) n s).
Üksteisele järgnevaid erineva pikkusega k + m varjutust n sekundi tagant näitav tuli.
Võrdfaasne tuli (isophase light, Iso n s), võrdse valguse ja pimeduse kestusega n sekundi
tagant korduv tuli.
Plinktuli (single flashing light, Fl n s). n sekundi tagant korduv lühike, 0,7...2 sekundi
pikkune plink.
Koguplinktuli (group flashing light, Fl k n s). n sekundi tagant üksteisele kiirelt järgnevaid
plinke näitav tuli. Plinkide vaheline pimedus grupis on lühike, võrreldes pimeduse kestusega
gruppide vahel.
Kombineeritud koguplinktuli (composite group-flashing light, FL (k + m) n s). n sekundi
tagant üksteisele kiiresti järgnevaid k + m plinki näitav tuli.
Sage plinktuli (continuous quick light, Q). Minutis 50...79 (harilikult 60) plinki näitav tuli.
Sage koguplinktuli (group quick flashing light (group of three flashes), Q(3)). 10 sekundi
tagant 3 kiiret plinki näitav tuli.
Ülisage plinktuli (continuous very quick light, VQ) minutis 80...150 (harilikult 120) plinki
näitav tuli.
Pikk plinktuli (long flashing light, LFl n s). n sekundi tagant võrdse, mitte alla 2-sekundilise
kestusega plinke näitav tuli. Pimeduse kestus on vähemalt 3 korda pikem plinkide kestusest.
Kogupikkplinktuli (group long flashing light, LFl k n s). n sekundi tagant üksteisele
järgnevaid k pikka plinki näitav tuli.
Kombineeritud kogupikkplinktuli (composite group long flashing light, LFl (k + m) n s). n
sekundi tagant üksteisele järgnevaid k + m pikka plinki näitav tuli.
45. Navigatsiooniliste käsiraamatute liigitus.
Meresõitja vajab ohutuks navigeerimiseks hulgaliselt teavet
meresõiduohtude, meremärkide, navigatsioonisüsteemide,
sadamate ja paljude muude objektide kohta. Seda teavet saab
ta meresõitjatele määratud käsiraamatutest:
lootsiraamatud (Pilot books)
tulede ja märkide nimistu (List of lights)
meresõidu raadiotehnilised vahendid (Aids to
radionavigation)
Lootsiraamatud annavad rannajoone ja rannal asuvate
meresõiduks kasutatavate objektide täpse kirjelduse kindla
skeemi järgi. Reeglina koosneb lootsiraamat järgmistest
osadest:
kirjeldatava rajooni skeem koos rajooni piiridega
kirjeldatava rajooniga piirneva rajooni lootsiraamatute
nimetused
korrektuurileht
tiitelleht
tähtsad hoiatused
üldised andmed – kasutatavad sügavuse, kauguse ja
kõrguste mõõtühikud, tuletornide sektorite tähistamise süsteem
sisukord
rajooni navigatsiooniline ja hüdrometeoroloogiline üldiseloomustus
navigeerimise eeskirjad antud rajoonis
46. Merekaartide ja käsiraamatute korrektuur ja
hoidmine laevas.
Merekaardid peavad alati vastama tegelikkusele. Siit tuleneb
vajadus teha merekaartidele ja sõidujuhistele järjekindlalt
parandusi ja täiendusi. Merekaartide ja teiste navigatsiooniliste
trükiste hoidmist kaasaja tasemel nimetatakse korrektuuriks.
Olenevalt paranduste mahust ja laadist liigitatakse korrektuur
kolme liiki
-uus väljaanne
-suur korrektuur
-väike korrektuur
Väikese korrektuuri aluseks on „Teadanded meremeestele“
Merekaartide ja sõidujuhiste korrigeerimine laevadel on
laevajuhtide ülesanne
47. Reisi navigatsiooniline ettevalmistus. Kaartide ja
käsiraamatute valik.
48. Reisiplaan. Kursside eelmärkimine.
49. 3D kaardid.
50. Navigatsiooniline infosüsteem elektroonkaardil.
ECDIS.
51. Looded. Kõrg- ja madalvee aegade ning kõrguste
määramine põhisadamates ja lisapunktides. Tõusu-mõõna tabelid ja nende kasutamine. Tõusu-mõõna
hoovused ja nende arvestamine.
Loodeid põhjustavad Kuu ja Päikese külgetõmbejõud ning Maa
ja Kuu ühise massikeskme ümber pöörlemisel tekkivad
kesktõuke- ehk tsentrifugaaljõud
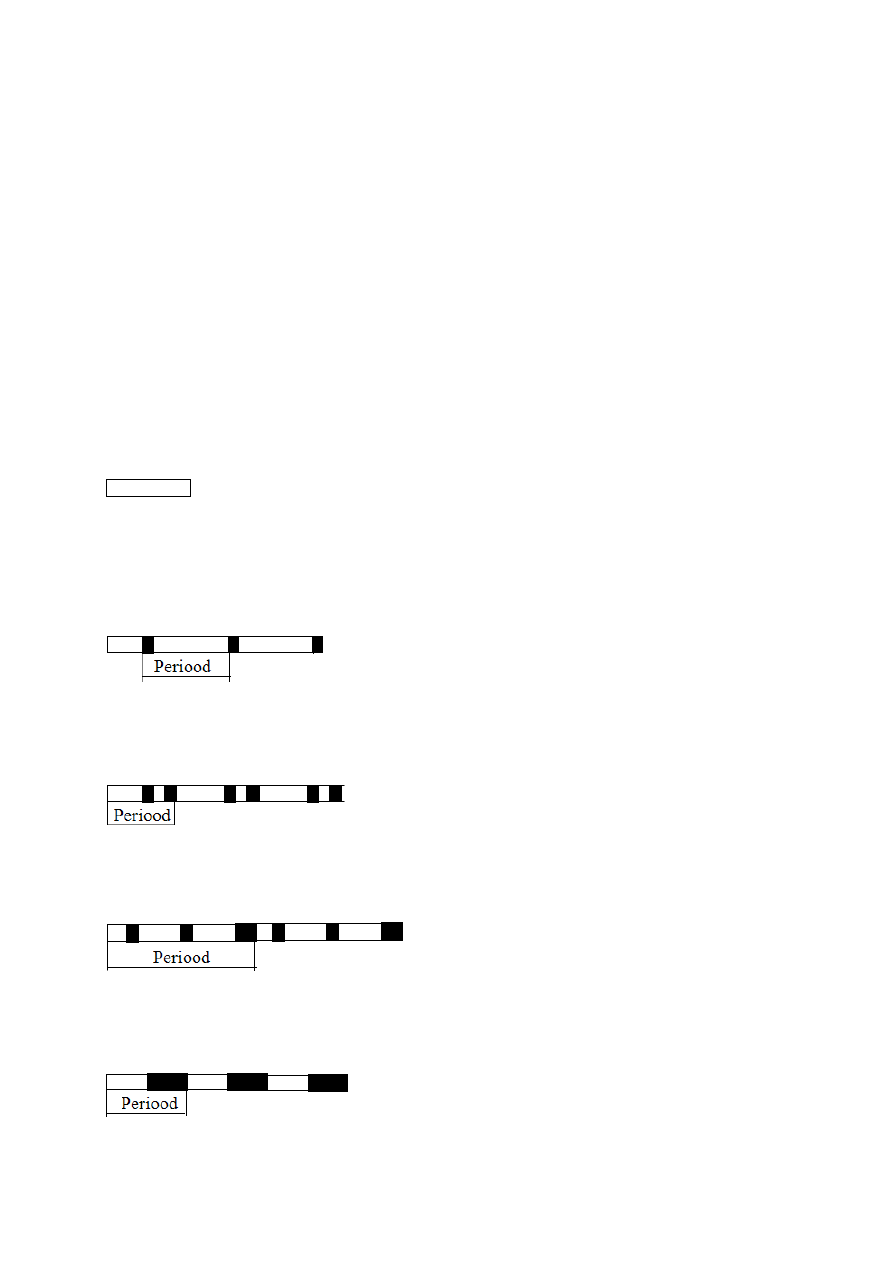
Kui uurida loodete kõveraid sadamates, ilmneb, et ei leidu
sääraseid, mille loodete kõverad oleksid täpselt sarnased.
Samas aga näitavad uuringud, et sama ranniku sadamate
loodete vahel on palju sarnast. Ajavahemikku kahe teineteisele
järgneva kõrg- või madalvee vahel nimetatakse tõusu-
mõõnaperioodiks. Olenevalt perioodist jagatakse looded
poolööpäevasteks, ööpäevasteks ja korrapäratuteks.
Poolööpäevaste loodete korral toimub lunaarse ööpäeva jooksul
kaks tõusu ja kaks mõõna. Ööpäevaste loodete korral toimub
lunaarse ööpäeva jooksul üks tõus ja üks mõõn.
Loodete elementide ettearvutamine
Laevadel kasutatakse põhiliselt Inglise Admiralteedi loodetetabeleid
(Admiralty Tide Tabels), mis koosnevad kolmest köitest.
Volume 1 European Waters (including Mediterranian Sea
Volume 2 The Atlantic and Indian Oceans
Volume 3 The Pacific Ocean and Adjacent Seas
Sadamad on jaotatud põhisadamateks (standard ports) ja lisasadamateks
(secondary ports). Igale köites nimetatud pea- ja lisasadamale on
omistatud järjenumber.
Köidete I osas (part 1) antakse põhisadamate jaoks aasta igaks päevaks
ettearvutatud kõrg- ja madalvee ajad ja taseme kõrgused eraldi lehel,
samuti loodete graafik, mille abil on võimalik ette arvutada tegelikku
veeseisu mingiks antud ajahetkeks.
Köidete II osas (part 2) antakse lisasadamate kõrg- ja madalvee aja ja
taseme parandid peasadama suhtes
Tõusumõõna hoovuste andmed võivad olla kaardil või eraldi
väljaantavas
„Loodete atlas“
52. Laeva logiraamat, selle täitmine.Logiraamat on ainuke dokument, mis kajastab katkematult
laeva ja tema meeskonna igapäevast tegevust, samuti selle
tegevusega kaasnevaid asjaolusid ning olukordi. Logiraamatu
pidamise vastutus lasub kaptenil. Laevajuht peab hästi tundma
logiraamatu pidamise eeskirju ning neid rangelt täitma.
Logiraamatu sissekannetel on hindamatu tähtsus, sest nende
järgi tuvastatakse sündmuste käik ja määrakse poolte vastutus.
Sissekanded tuleb teha täpselt, täielikult ja selgelt. Sissekanded
logiraamatusse peavad võimaldama õigesti taastada laeva tee
graafilist kujutist kaardil. Logiraamatus fikseeritakse
välistingimused ja nende muutused, mis tegid vajalikuks kursi
või käigu muutuse. Kõik sissekanded peavad näitama juhtumi
algushetke ning fikseerima selle 5 minuti 6täpsusega, aga eriti
tähtsatel juhtumitel 1 minutilise täpsusega. Enne sissekannete
tegemist tuleb tutvuda eelmise vahi poolt tehtud
sissekannetega, et fikseeritav oleks kronoloogiliselt kooskõlas
eelnevaga. Erilist täpsust nõuvad sissekanded, mis tehakse
piiratud nähtavusega sõidu või kokkupõrke vältimiseks
ettevõetud manöövrite korral.
53. Laeval nõutavad klassifikatsiooniühingute EVA poolt
väljaantavad dokumendid.
54. SOLAS`i nõuded laevade navigatsiooniliste
seadmetega varustamise kohta.
55. Liikluseraldus skeemid.
56. Kohustuslikud ettekanded.GOFREP.VTS.
57. AIS, selle otstarve.
Automaatne identifitseerimise süsteem
Automaatne identifitseerimise süsteem –AIS- on digitaalne sidesüsteem, mis
võimaldab laevadel ja teistel objektidel vahetada koordinaatide, liikumise ja
muud teavet. Süsteem eesmärk on suurendada laevaliikluse ohutust ja edastada
teavet laevade liiklusohutusega tegelevatele asutustele.
IMO sätestab, et AIS tõhustab:
- inimelu ohutust merel
- meresõidu ohutust
- keskkonna kaitset
- laevade identifitseerimist
- laevade liikumise jälgimist
- teabe vahetamist välistades kohustuslikud verbaalsed ettekanded
AIS paigutatakse SOLAS ja mitte SOLAS laevadele, laevade liiklusjuhtimise
keskustesse, ranna ja meremärkidele (AIS AtoNs).
AIS- ga varustatud laevad edastavad automaatselt ja pidevalt hetke
olukorrale vastavat teavet, mis koosneb:
- staatilisest teabest: laeva nimi, mõõdud, IMO number, MMSI
- dünaamilisest teabest: hetke koordinaadid, kiirus, kurss
- reisi teabest: sihtsadam, eeldatav saabumise aeg ( ETA), süvis, pardal
olevad ohtlikud kaubad.
58. Sõit jääs.
Sõit jääs toimub kas iseseivalt või jäämurdja järel. Sõidul
ajujääs valitakse lühim ree. Peamisel valitakse jääs sõidul kõige
kergem tee, mööda lahvandusi ja hajutatud jää. Läbitud tee
arvestus sõidul jääs on raskendatud sagedaste kursi- ja kiiruse
muutumise pärast. Kursi sagedasel muutumisel fikseeritakse
see iga 6 minjuti tagant. Keskmine kurss arvutatakse täistunni
järel ja kantakse kaardile. Läbitud tee arvutatakse põhiliselt
kiiruse ja aja järgi. Kiirust võib määrata ka pardalogi meetodil.
59. Meresõit halva nähtavusega.
Udu, vihm, lumesadu teevad meresõidu keeruliseks. Kui on ette
näha nähtavuse halvenemis tuleb
-määrata laeva koht kaldamärkide järgi
-sisse lülitada käigutuled
- teavitada masinavahile udusse sisenemisest
-sisse lülitada radar
-saadetakse madrus vööri
-alustatakse udusignaalide andmist
-
60. Sõit ranna lähedal, kitsustes ja skäärides.
Rannalähedasi ja madalarikkaid piirkondi, kus laeva
manöövrivabadus on piiratud nimetatakse navigatsiooniliselt
kitsendatuiks. Nendes piirkondades toimub meresõit peamiselt
faarvaatrite ja soovitatud kursside järgi. Ohutuse tagamiseks on
oluline sellise sõidupiirkonnaga eelnevalt tutvuda, teha kursside
eelmärkimisi ja arvutusi. Toetudes varem läbitöötatud
marsruudile, peab laevajuht pidevalt kontrollima, et laev liiguks
eelmärgitud kurssi mööda. Kursid valitakse lootsiraamatute ja
käsiraamatute soovituste alusel. Kursid soovitatakse valida nii,
et nad oleksid kontrollitavad tehis- või looduslike liitsihtide järgi.
Sõidul mööda liitsihti peab roolimees jälgima, et eesmine märk
langeks kokku tagumisega. Laeva tee arvutus ja
kohamäärangud tuleb sõidul rannaläheastel aladel teha
suurima täpsusega. Igal kursil tuleb pöördepunkti kaugus ja
pöörde alguse moment määrata. Pöördepeilingute valikul on
soovitav nende rööpsus uue kursijoonega, et tagada täpne
uuele kursile asumine ka sel juhul kui laev oli hälbinud eelmiselt
kursilt. Muutes kurssi faarvaatri pööretel ei tohi tee
lühendamiseks nurki lõigata. Sõidul kitsustes tuleb
-vähendada kiirust
-hoida ankrud valmis allalaskmiseks
-paigutada roolimees varurooliseadme juurde
Laeva asukohta soovitatakse määrata iga 10 minuti tagant
61. Avamerenavigatsioon. Troopiliste tsüklonite
vältimine. Sõit suurringi kaarel.
Laeva liikumisel ühest punktist teise oleks õige kasutada kõige ökonoomsemat
trajektoori. Kõige ökonoomsemaks peaks olema trajektoor, mis on lühim ja
tagab lühima sõiduaja kahe punkti vahel. Vahel võivad need nõuded olla
vastandlikud. Näiteks lühim tee võib laeva viia rajooni, kus on võimalik kohtuda
jäämägedega, sattuda piiratud nähtavusega alasse või troopilise tormi
meelevalda. Seepärast tuleb soodsa meretee valikul arvestada veel lisaks
minimaalsele vahemaale ja ajale muid tegureid, nagu:
sõidu trajektoor peab mööduma ohutul kaugusest kõikidest
meresõiduohtudest
trajektoor peab järgima meresõidu käsiraamatutes soovitatud trajektoore
ja eraldatud liiklusega rajoonides kehtestatud sõidureegleid
võimalikke ilmastikutingimusi.
Reisi kulud on võrdelised reisi pikkusega, seepärast tuleb vähendada reisi
kestust. Seda võib tõestada praktikast tuntud tõiga abil. Laeva
ülalpidamiskulusid saab väljendada valemiga:
K = qktk + qsts
kus qk on kütusekulu ööpäevas sõidu ajal, tk – sõiduaeg, qs – kütusekulu
ööpäevas sadamas, ts – laeva seisuaeg sadamas.
Reeglina on kütusekulu ööpäevas sõidu ajal 5...10 korda suurem ööpäevasest
kütusekulust sadamas, seepärast on sõiduaja lühendamisel oluline tähtsus laeva
majandamise seisukohalt. Uurimused näitavad, et sõiduaja kokkuhoid 2%
vähendab vedude omahinda 1% võrra.
Soodne meretee ei ole seega seotud ainult lühima vahemaa leidmisega kahe
sadama vahel, vaid hõlmab ka teisi asjaolusid, eelkõige aga
hüdrometeoroloogilisi tingimusi – tuult, hoovust, nähtavust, jääolusid.
Eespool öeldut arvestades peaks soodne meretee:
tagama sadamatevahelise vahemaa läbimise lühima ajaga
tagama möödumise meresõiduohtudest piisaval kaugusel
tagama kokkupõrkeohu minimaalseks viimise
vastama meresõidu käsiraamatutes soovitatud trajektoorile
arvestama meresõidu hüdrometeoroloogilisi tingimusi
Soodsa meretee valimiseks tuleb eelkõige leida lühim tee antud sadamate vahel.
Selleks on neid sadamaid ühendav suurringi kaar ehk ortodroom.
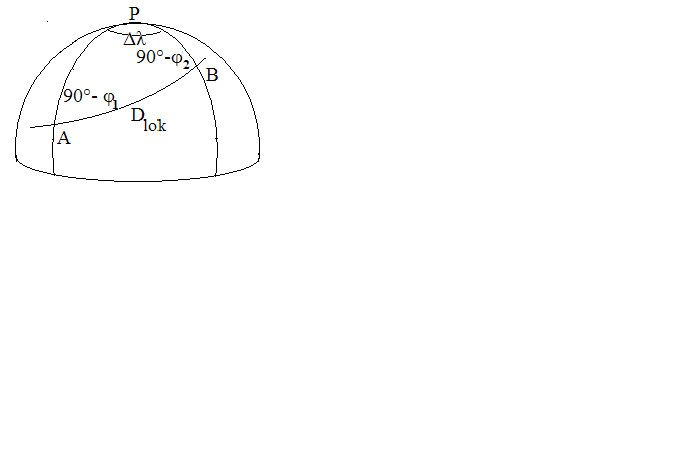
Ortodroomi pikkuse arvutamine
cos Dlok = sin φ1 sin φ2 + cos φ1 cos φ2 cos Δhλ
Avamere ületamise laevateede valikul on kasulik väljaannet Ocean Passages for
the Word.
Troopiline tsüklon kujutab madalrõhuala läbimõõduga 100 –
600 miili, kus põhjapoolkeral toimub intensiivne õhumasside
liikumine vastupäeva.
Troopilised tsüklonid tekivad troopilistes laiustes ja liiguvad
kiirusega 5 ...10 sõlme subtroopilise ja keskmiste laiuste poole.
Õhurõhk tsükloni keskmes on 950 – 970 hektopaskalit.
Atlandi ookeanis troopilised tsüklonid tekivad West india saarest
ida pool ja Rohelise Neeme saare juures.
Troopilise tsükloni lähenemise tunnused:
Tuult on tunda 700 miili kaugusel, lainetust 400 – 500 miili
kaugusel.
Üheks troopilise tsükloni lähenemise tunnuseks on pikkade
ribataoliste kiudpilvede ilmumine, mis on hästi nähtavad enne
ja pärast Päikese tõusu. Kui need pilved jooksevad kokku ühte
ilmakaare punkti, on troopilise tsükloni keskme kaugus 500 miili
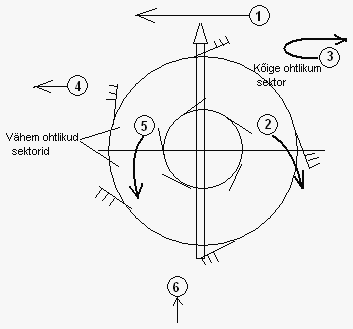
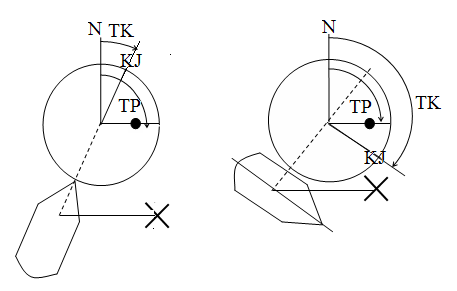
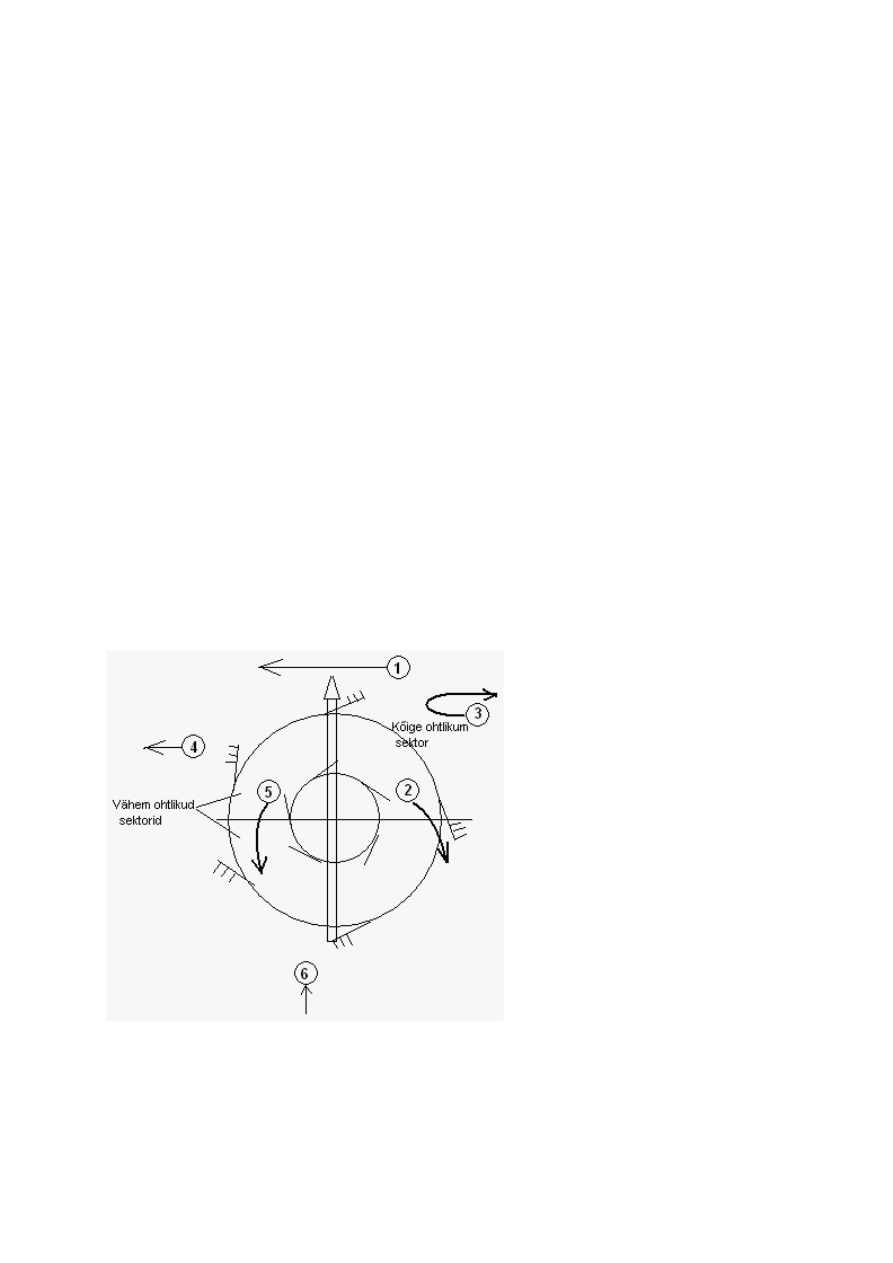
Situatsioon 1. Kui laev on tsükloni keskmest nii kaugel, et jõuab ohutult
keskme eest läbi minna, tuleb liikuda edasi hoides kogu aeg tuult
paremast poordist võimalikult risti tsükloni liikumise suunaga.
Situatsioon 2. Laev asub ohtlikus veerandis ja ei jõua ohutult keskme eest
läbi minna. Tuleb eemalduda keskmest, hoides tuult parema poordist.
Situatsioon 3W kursiga TK =38° ja läbis 134 miili. Määrata Laev läheneb ohtlikule veerandile. Tuleb pöörata
vastaskursile ja eemalduda keskmest.
Situatsioon 4 Eemalduda ristisuunas tsükloni keskmest, hoides tuult
paremast poordist.
Situatsioon 5 Laev asub vasakpoolses veerandis ja ei saa liikuda keskmega
ristisuunas. Tuua tuul parema poordi ahtri kursinurkadele.
Situatsioon 6 Laev jõuab tsüklonile järele. Vähendada kiirust, hoides tuult
vasakust poordist.
62. Päästepaadinavigatsioon.
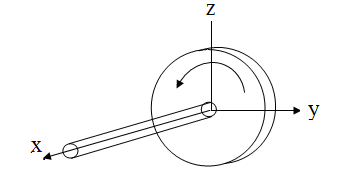
63. Maa ööpäevase pöörlemise komponendid ja nende
sõltuvus vaatleja geograafilisest laiusest.
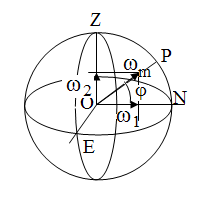
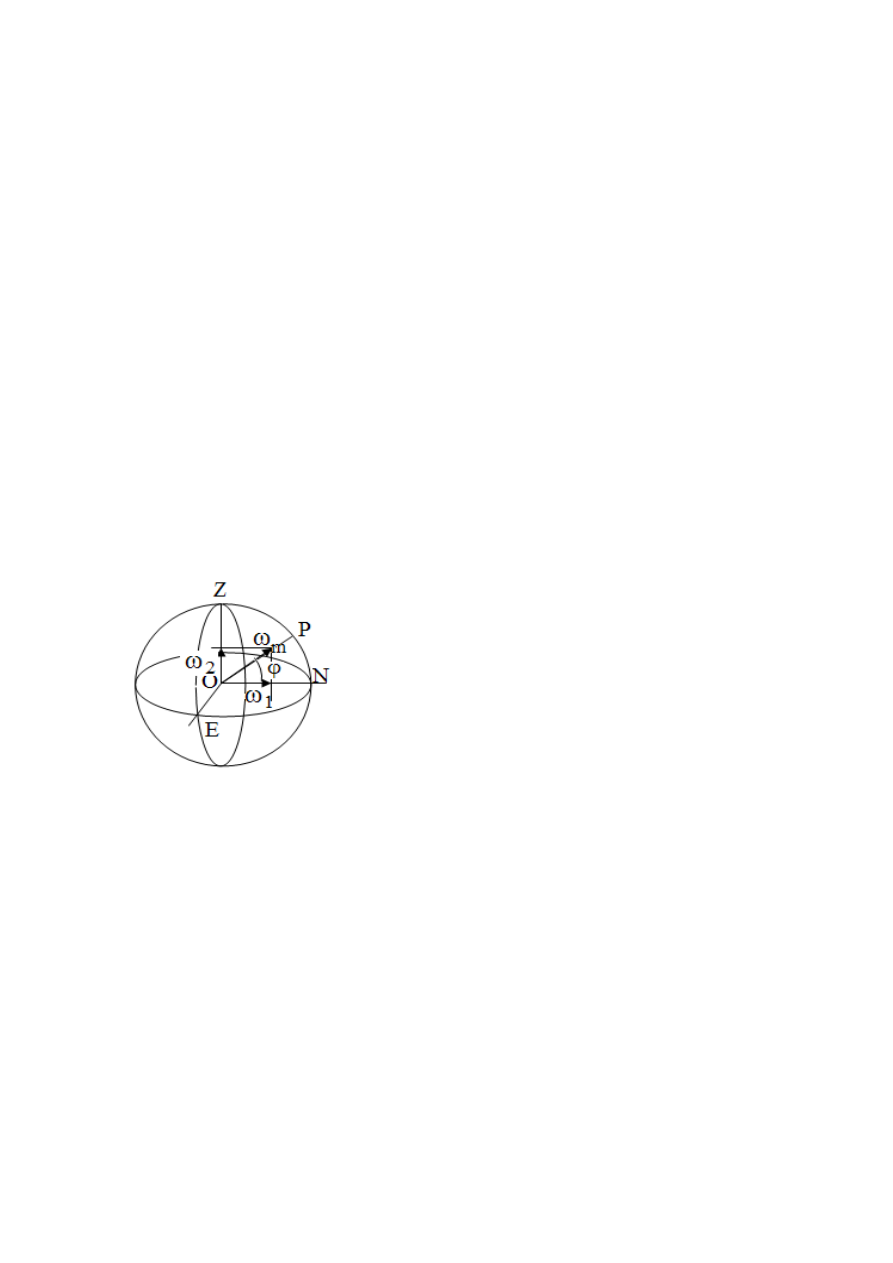
Maa ööpäevase pöörlemise komponendid on:
Maa ööpäevase pöörlemise nurkkiirus ωm
Maa ööpäevase nurkkiiruse projektsioon keskpäeva joonele
ω1 =
ωmcosφ
Maa ööpäevase nurkkiiruse projektsioon püstteljele ω2 =ωsinφ
64. Vurri pöörlemise kiirust ja suunda iseloomustavad
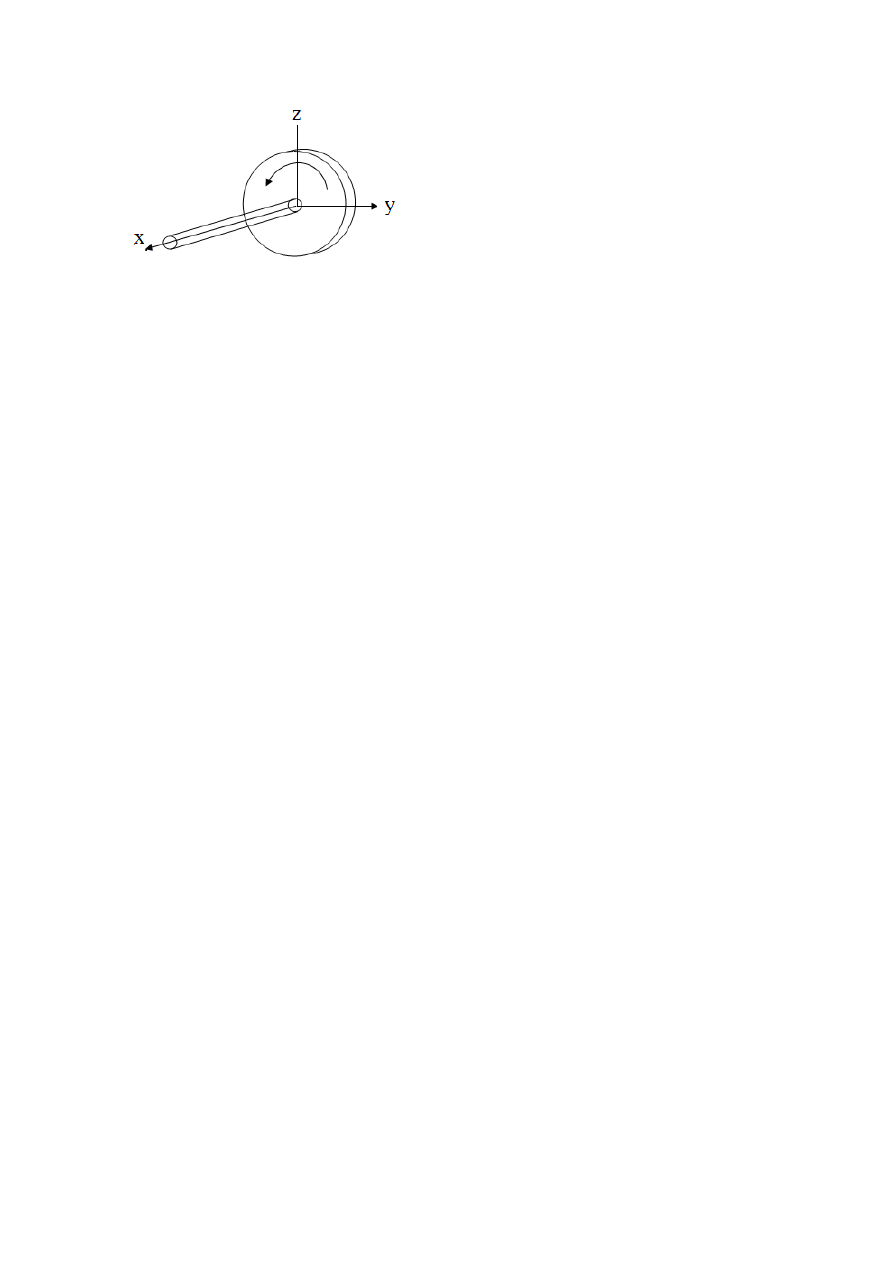
näitajad.Telg, mille ümber vurr pöörleb ja mida nimetatakse vurri
peateljeks.
Nurkkiirus, mida tähistatakse kreeka tähega omega ω.
Nurkkiirust mõõdetakse nurgaga, mille võrra vurr pöördub
ajaühikus. Nurkkiiruse ühikuteks on rad/sek.
65. Vaba vurri põhilised omadused.
1)vaba vurr püüab säilitada muutumatuna oma peatelje suunda
liikumatu taustsüsteemi suhtes
2) Välise jõu rakendamisel vaba vurri teljele, mis ei ole peatelg,
ei liigu peatelg mitte rakendatud jõu suunas, vaid ristsuunas
sellele. Seda vaba vurri omadust nimetatakse
pretsessiooniks
3) Lühiajaline välisjõu mõju –näiteks löök- peateljele ei muuda
tema suunda
taustsüsteemi suhtes
66. Selgitada, miks vaba vurri ei saa kasutada
suunanäitajana.
Vabal vurril puudub pretsessioo
n
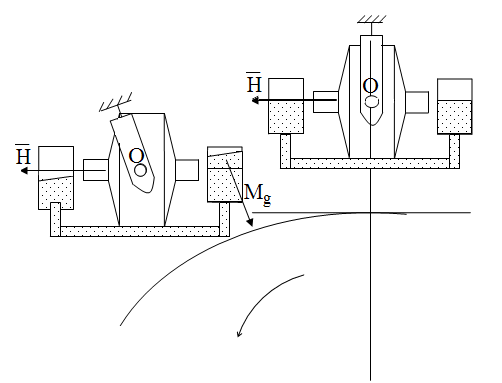
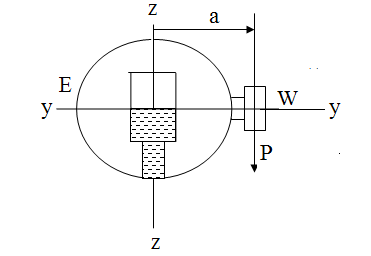
67. Vaba vurri muutmine suuna näitajaks raskuskeskme
langetamisega. 68. Vaba vurri muutmine suuna näitajaks ühendatud
anumatega.
69. Kiirusdeviatsioon.
δ=
−
V
LcosTK
900 osφ
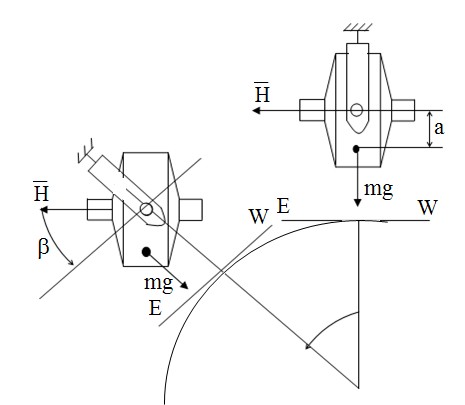
70. Kiirenduse mõju vurrkompassi näidule.Laeva liikumiskiiruse või kursi muutumisel tekivad kiirendused,
mille mõjul ilmuvad inertsjõud. Interjõudude momendid
kutsuvad esile tundliku elemendi pretsessiooni ja peatelg
kaldub kõrvale meridiaanist, tekitades vea kompassi näidus.
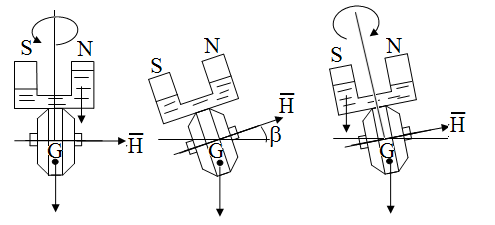
71. Sumbumatute võnkumiste summutamine
õlisummutiga.
72. Sumbumatute võnkumiste summutamine eksentrilise
raskusega.
Lisaraskus tekitab pretsessiooni, mis on alati suunatud tõelise
horisondi poole ja summutab tundliku elemendi võnkumised.
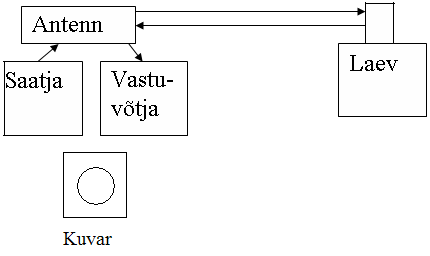
73. Radari tööpõhimõte ja radari peamised elemendid.Navigatsiooniline raadiolokaator töötab järgmiselt. Saatja
genereerib ja kiirgab ülikõrgsageduslikke raadiolaineid, mis
sondeerivad ümbritsevat keskkonda. Kui raadiolaine teele satub
keha, mille dielektriline läbitavus erineb keskkonna omast, siis
teatud osa kehale langevast energiast peegeldub kajana tagasi,
millest osa võtab vastu raadiolokaatori antenn ja kuvarile ilmub
objekti kaja helendava punkti näol . Sellega on täidetud üks
raadiolokaatori põhiülesanne- avastada objekt. Edasi tuleb
määrata objekti koordinaadid – suund ja kaugus.
74. Radari kauguse eraldamise võime ja nurga
eraldamise võime.
Minimaalne nurk kahe ühesugusel kaugusel oleva objekti vahel,
mille puhul objektid on kuvaril eraldi nähtavad
Ülerefraktsioon
Alarefraktsioon
Külm kallas
Soe meri
75. Atmosfääri mõju radari objektide avastamise
kaugusele.
Sademed vihm ja udu, lumesadu sest iga piisk muutub kiirguse
allikaks.
Atmosfääriseisund, mis võib tekitada üle- või alarefraktsiooni
76. Tegurid, mis mõjutavad radari objektide avastamise
kaugust.
Atmosfääri tingimused lumesadu, udu, vihm
77. Radari kujutise orientatsiooni režiimid.
• Orientetatsioonis „põhi üleval” on kujutis orienteeritud tõelise
meridiaani suhtes. „põhi üleval” orientatsiooni puhul laeva kursijoon
pöördub kursi muutmise nurga võrra
78. Doppleri logi töö põhimõte.
Logi saatja saadab välja helisignaali sagedusega f0,
peegeldudes merepõhjast muutub sagedus f1 ja vastuvõtjasse
jõuab signaal sagedusega f2. Mõõtes sageduste f0 ja f2 vahe
Δhf on võimalik välja arvutada laevakiirus valemiga v=
Δ f
2 f
0
c
79. Satelliitnavigatsioon .Navstar GPS.Galileo.Glonass.
80. GPS tööpõhimõte ja kauguse mõõtmine
pseudojuhusliku müraga.
f2
f1
f0
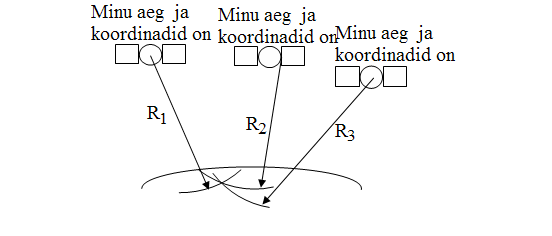
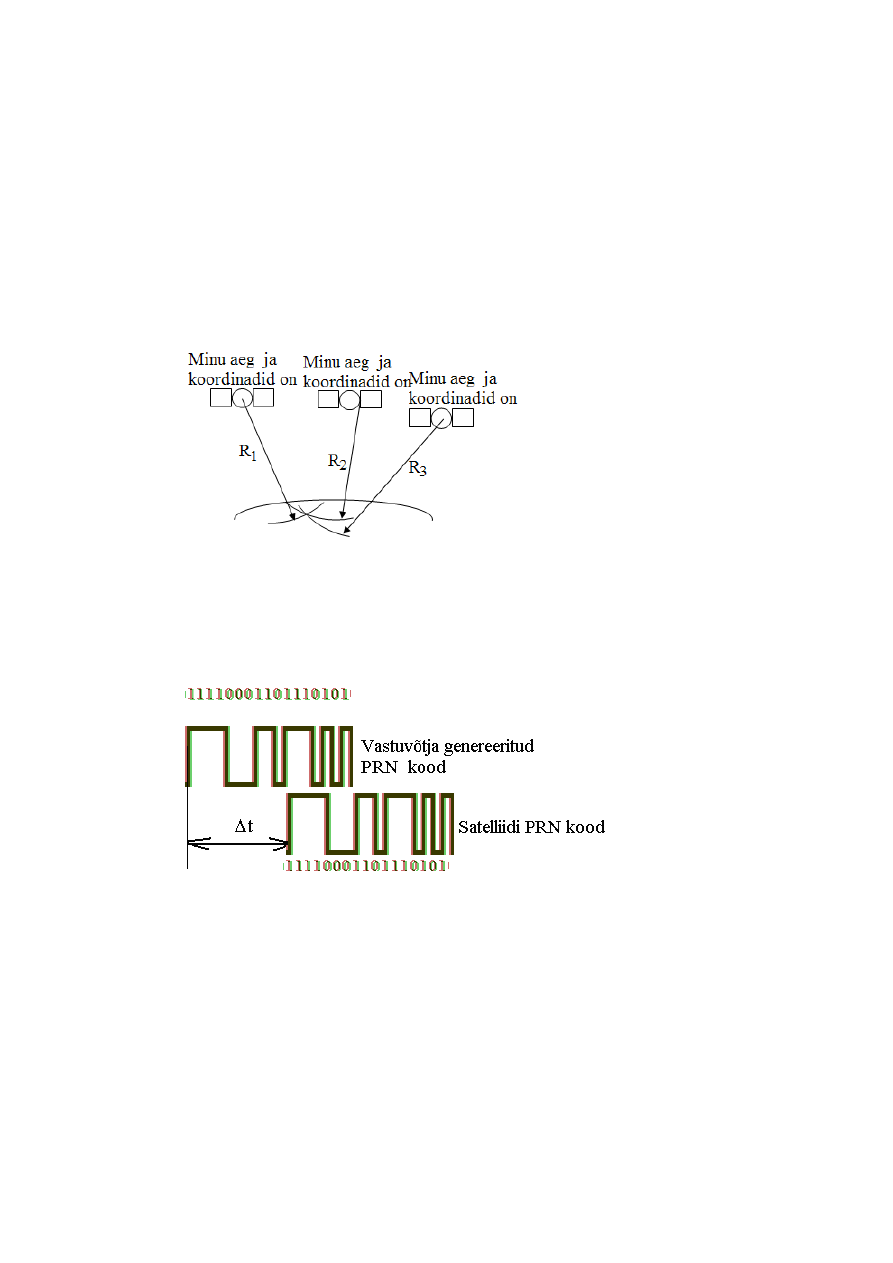
Kohamääramiseks mõõdetakse ajavahemik, mis kulub
raadiosignaalil satelliidilt laeva vastuvõtjani jõudmiseks.
Korrutades selle ajavahemiku raadiosignaali levimiskiirusega,
saadakse satelliidi ja laeva vaheline pseudokaugus. Kera pind,
mille raadiuseks on pseudokaugus, lõikudes Maa pinnaga,
annab samakaugusjoone. Mõõtes kaugused kolme satelliidi ja
laeva vahel, saame kolm samakaugusjoont, mille lõikepunkt
ongi laeva asukoht.
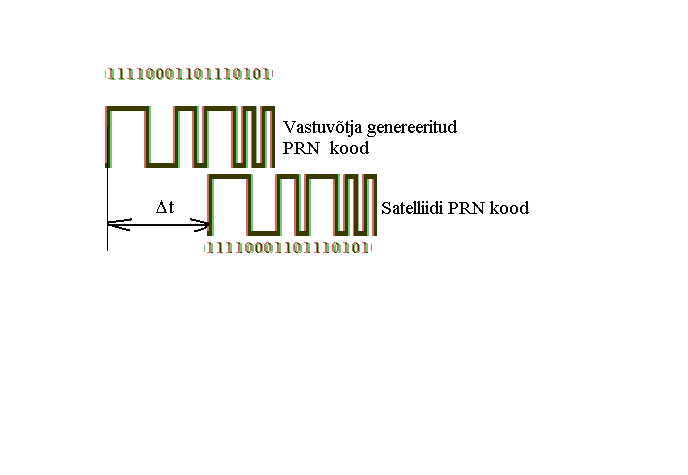
Satelliidi ja laeva vaheline kaugus mõõdetakse pseudojuhusliku
müra abil
Pseudojuhusliku müra kood
Document Outline



























































































Kõik kommentaarid