Laboratoorne töö nr.5: joonte orienteerimine Laboratoorse töö eesmärgiks on määrata laboratoorses töös nr.3 märgitud kolmnurga joontele tõelised asimuudid ja direktsiooninurgad. Leida meridiaanide koonduvused, rumbid ja horisontaalnurgad. Laboratoorses töös nr.3 leitud punktide geodeetilised ja ristkoordinaadid on esitatud tabelis (Tabel ). Tabel . Punktide 1, 2 ja 3 geodeetilised ning ristkoordinaadid Punkt B L X(km) Y(km) 1 5923'35'' 2507'35'' 6684,37 564,03 2 5924'20'' 2510'33'' 6685,80 566,81
Laboratoorne töö nr 4 Joonte orienteerimine Direktsiooninurgad 12 = 122° 13 = 154°30 Tõelised asimuudid A12 = 124° A13 = 156°30 Horistontaalnurk = 32°30 Punkt B L X Y 1 58°5526 26°185 6533850 655450 2 58°5436 26°2033 6532350 657850 3 58°5413 26°19 6531850 656400 1. Meridiaanide koonduvuse arvutamine a) Meridiaanide koonduvuse arvutamine mõõdetud direktsiooninurkade ja tõeliste asimuutide järgi. 1 = A12 - 12 = 124° -122° = 2° 2 = A13 - 13 = 156°30 -154°30 = 2° Kaardil on SW : 1°51 a) Meridiaanide koonduvuse arvutamine punkti geodeetiliste koordinaatide järgi. = L × sin B, kus L = L - Lt ja Lt = 24°00, see on te lg meridiaani väärtus. L1 = 26°185 - 24° = 2°185 1 = 2°185 × sin 58°5526 = 1°5816 L2 = 26°2033 - 24° = 2°2033...
Kontrolltöö Nr 4 - B Variant Nr 1 1. Maakera kuju ja mõõtmed; Maakera põhipunktid ja ringid. 2. Laev sõitis punktist A( 1 = 28 * 15,7 N ; 1 = 152 * 34,3W ) punkti B( 2 = 34 * 06`,2 N ; 2 = 125 *14`,1W ) Leida LV ja PV; teha joonis. 3. Dk = 37 miili; e = 2,9 meetrit. Leida nähtavuskaugus? 4. Slg = 21,04 miili; lg = -3% ; LNV = ?; Klg = ?. 5. SWtS; SE; ja WSW; Arvutada toodud rumbid kraadideks täisring ja veerandring süsteemis. 6. TK = 300*; TP = 231*; d = 7,2E; =1,5W Leida: MK; KN; KP; MP; KK. Teha joonis? Kuupäev Lahendas Kontrolltöö Nr 4 - B Variant Nr 2 1. Näiva horisondi kaugus; Eseme nähtavuskaugus? 2. Laev sõitis punktist A( 1 = 42 * 15`,9 N ; 1 = 170*,10`1E ) Punkti B( 2 30 * 54`,2 N ; 2 = 151 * 49`,9W ) Leida LV ja PV; teha joonis? 3. h = 102m; ja e = 210m
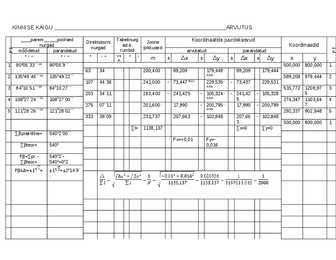
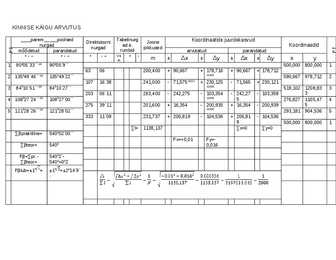
Koordinaadid PT PT mõõdetud parandatud rumbid arvutatud parandatud Ve ° ' '' ° ' '' ° '" er ° ' m ± x ± y ± x ± y x y 0 -24 0
pikkused Koordinaadid PT PT mõõdetud parandatud rumbid arvutatud parandatud Ve ° ' '' ° ' '' ° '" er ° ' m ± x ± y ± x ± y x y 0 -24 0 1 90 05`33`` 90 05`9`` 500,000 800,000 1
Tartu ümbruses on deklinatsioon ~+7°, Lääne- Euroopas -5°…-10°. Kui magnetiline deklinatsioon muutub suuresti lühikese vahemaa jooksul, on tegemist magnetilise anomaaliaga. (Eestis on tuntuim Jõhvi anomaalia, kus deklinatsioon kõigub ±15° piires). Rumb Geodeetiliste arvutuste juures on otstarbekas kasutada asimuudi asemel rumbi. Rumb on põhja- lõuna suuna ja antud suuna vaheline lähim teravnurk, mida mõõdetakse ida või lääne suunas 0°- 90°kraadi. Rumbid tähistatakse veerandinumbritega ja nimetustega, mis tuletatakse ilmakaarte esitähtedest. Direktsiooninurk Et nii astronoomiline kui ka magnetiline asimuut ei ole erinevatel põhjustel ühe ja sama sirgjoone eri punktides konstantsed, siis eelistatakse geodeesias joonte orienteerimiseks kasutada direktsiooninurka ehk orienteerimist ristkoordinaatide võrgu X-telje suhtes. Direktsiooninurk on nurk ristkoordinaatide võrgu X-telje ja joone suuna vahel. Seda mõõdetakse päripäeva 0°-360°.
orienteerumine ning eraldamine on raske.Langil võib ka langi osa ja see on sel juhul kui lank on ülestöötamiseks mitmele metsavarujale või on vajadus eraldada lanki kk-kaitselistel või muudel põhjustel, raiutava puidu kogus määratakse (mitmed erinevad viisid). Kõik need tuleks eraldada,piiritleda,mõõdistada.Sellisel juhul langi või tema osa eraldamiseks koostatakse abriss,kus nõidatakse langi või tema osade sidumine orientiiridega,langi või selle osade külgede pikkused,rumbid või asimuudid või nendevahelised sisenurgad.Langi pindala kinnitatakse 0,01 ha järgi; 3)toimub puidukoguse määramise järgi,raiutud puidukoguse järgi. Proovitükkidel,aladel,lintproovitükkide aladel,lintproovidel puude mõõtmise teel. Silmamõõduliselt.Metsakorralduse andmete alusel. Ülestöötatud puidukoguse järgi kui raiutavat puidukogust pole võimalik või pole otstarbekas eelnevalt määrata. Neeljal viimasel nimetatud variandil
Meresõidu arenedes osutus horisondi jaotus rumbisüsteemis liiga ebatäpseks. Asendati see veerandringi süsteemiga, milles iga horisondi veerand jaotati 90° kraadiks. Suundi hakati lugema peasuundadest N ja S paremale ja vasakule poole näit. 45°NE; 34°SW 20. sajandi alguses asendati veerandringi süsteem ringskaala süsteemiga, milles horisont jaotatakse põhja suunast päripäeva 360 kraadiks. Välimine ring polaarkoordinaadid Sisemine ring - rumbid Tõeline kurss, tõeline peiling ja kursinurk Tõeline kurss (TK) - tõelise meridiaani tasandi põhjasuuna ja laeva pikitasandi vööripoolse suuna vaheline kahetahuline nurk, mida mõõdetakse päripäeva 0° - 360°. Tõeline peiling (TP) - tõelise meridiaani tasandi põhjasuuna ning vaatleja silma ja objekti läbiva püsttasandi vaheline kahetahuline nurk, mida mõõdetakse 0° - 360°. Kursinurk (KN) - laeva vööripoolse pikitasandi ning
Meresõidu arenedes osutus horisondi jaotus rumbisüsteemis liiga ebatäpseks. Asendati see veerandringi süsteemiga, milles iga horisondi veerand jaotati 90° kraadiks. Suundi hakati lugema peasuundadest N ja S paremale ja vasakule poole näit. 45°NE; 34°SW 20. sajandi alguses asendati veerandringi süsteem ringskaala süsteemiga, milles horisont jaotatakse põhja suunast päripäeva 360 kraadiks. Välimine ring polaarkoordinaadid Sisemine ring - rumbid Tõeline kurss, tõeline peiling ja kursinurk Tõeline kurss (TK) - tõelise meridiaani tasandi põhjasuuna ja laeva pikitasandi vööripoolse suuna vaheline kahetahuline nurk, mida mõõdetakse päripäeva 0° - 360°. Tõeline peiling (TP) - tõelise meridiaani tasandi põhjasuuna ning vaatleja silma ja objekti läbiva püsttasandi vaheline kahetahuline nurk, mida mõõdetakse 0° - 360°. Kursinurk (KN) - laeva vööripoolse pikitasandi ning