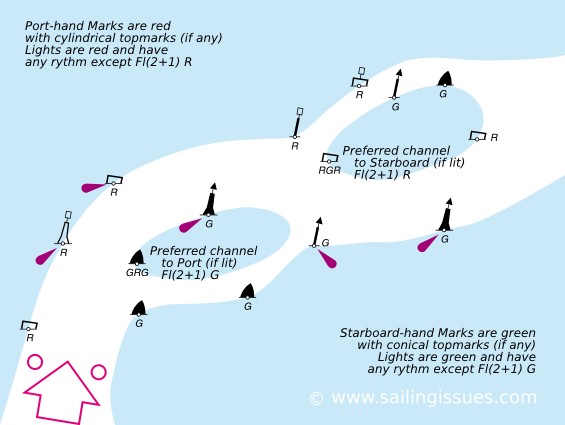
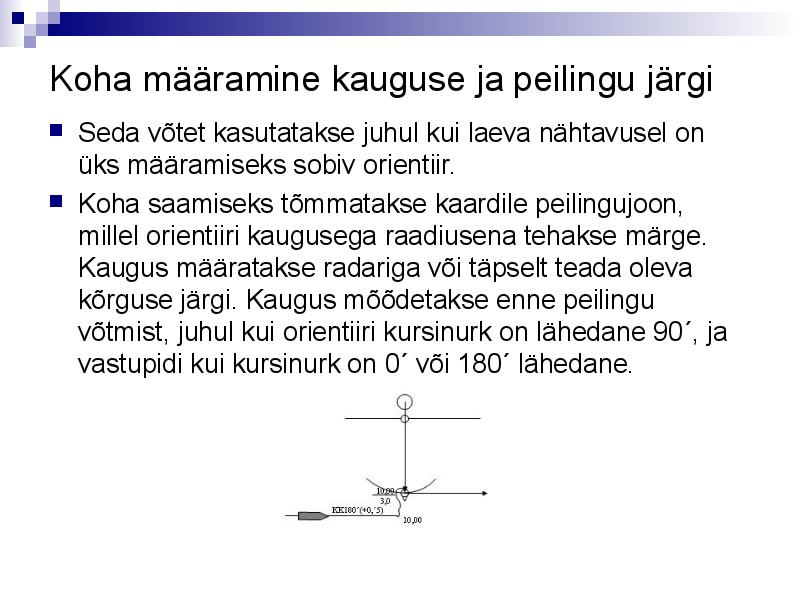
Väikelaevajuhid:
navigatsioon
www.tkj.ee
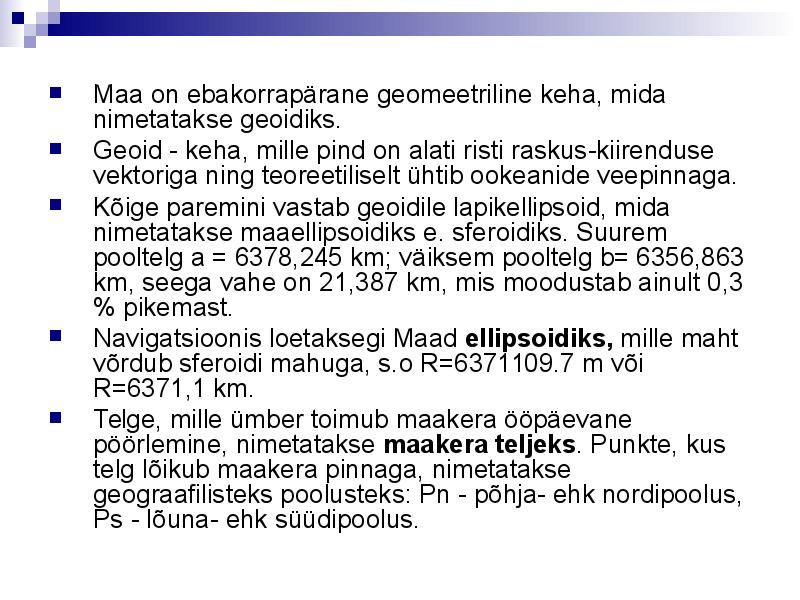
Maa on ebakorrapärane geomeetriline keha, mida
nimetatakse geoidiks.
Geoid - keha, mille pind on alati risti raskus-kiirenduse
vektoriga ning teoreetiliselt ühtib ookeanide
veepinnaga.
Kõige paremini vastab geoidile lapikellipsoid, mida
nimetatakse maaellipsoidiks e. sferoidiks. Suurem
pooltelg a = 6378,245 km; väiksem pooltelg b=
6356 ,863 km, seega vahe on 21,387 km, mis
moodustab ainult 0,3 % pikemast.
Navigatsioonis loetaksegi Maad
ellipsoidiks, mille
maht võrdub sferoidi mahuga, s.o R=6371109.7 m või
R=6371,1 km.
Telge, mille ümber toimub maakera ööpäevane
pöörlemine, nimetatakse
maakera teljeks. Punkte, kus
telg lõikub maakera pinnaga, nimetatakse
geograafilisteks poolusteks: Pn - põhja- ehk
nordipoolus, Ps - lõuna- ehk süüdipoolus.
Kõik punktid maakeral pöörlevad
itta (E)
Vaadates itta on vasakul põhi (N), paremal
lõuna (S) ja selja taga lääs (W).
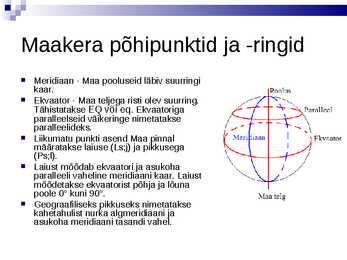
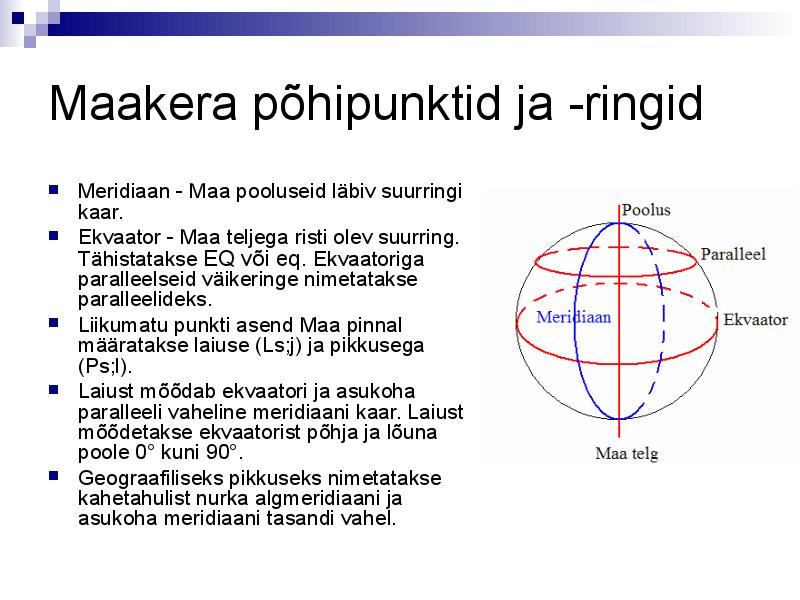
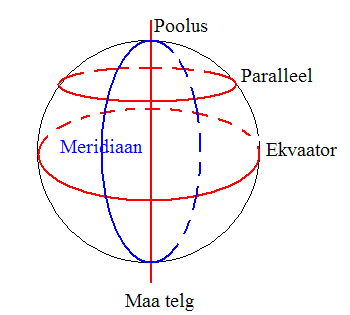
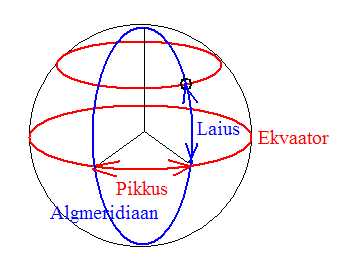
Maakera põhipunktid ja -
ringid
Meridiaan - Maa pooluseid läbiv suurringi
kaar.
Ekvaator - Maa
teljega risti olev suurring.
Tähistatakse EQ või eq. Ekvaatoriga
paral eelseid väikeringe nimetatakse
paral eelideks.
Li kumatu punkti asend Maa pinnal
määratakse
laiuse (Ls;j) ja pikkusega
(Ps;l).
Laiust mõõdab
ekvaatori ja asukoha
paral eeli vaheline
meridiaani kaar. Laiust
mõõdetakse ekvaatorist põhja ja lõuna
poole 0° kuni 90°.
Geograafiliseks pikkuseks nimetatakse
kahetahulist nurka algmeridiaani ja
asukoha meridiaani tasandi vahel.
Poolused - maakera telje punktid selle pinnal ja
neid nim lõuna- ning põhjapooluseks
Suurringideks nim ringjooni, mille
tasapind läbib maakera
keskpunkti : ekvaator, meridiaanid
ja ortodroom
Väikeringi moodustatava tasapinna
kese ei läbi
maakera keskpunkti: paralleelid, loksodroom
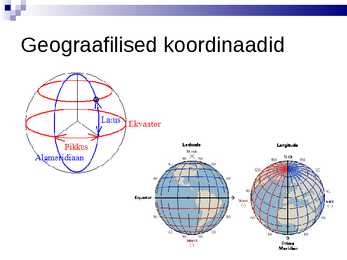
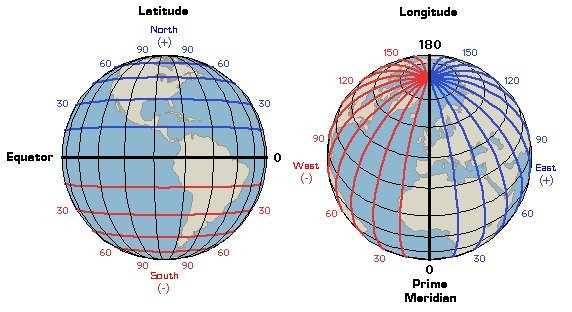
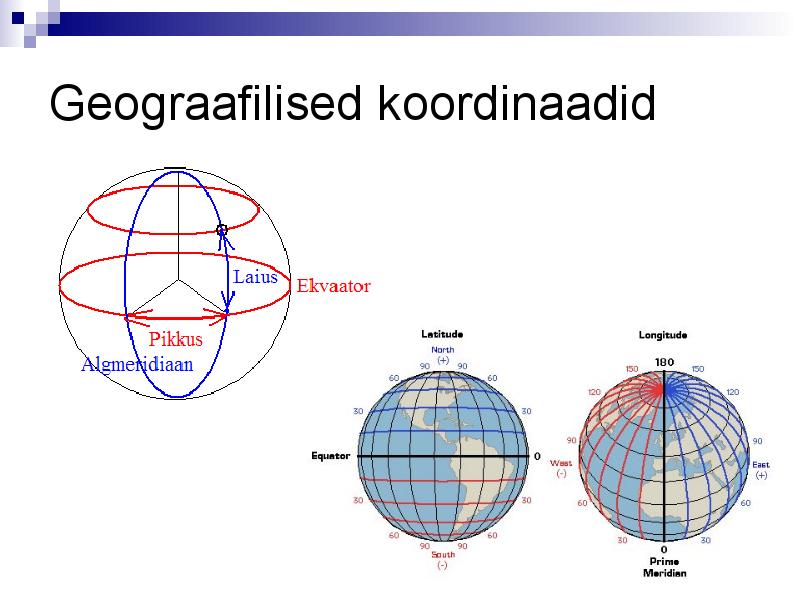
Geograafiline pikkus ja laius
Geograafilised koordinaadid, loetakse
kraadides, minutites ja kümnendikminutites
Meie asukoht:
φ=58o32’ N (laius) ja
λ=026o40’ E (pikkus)
Geograafilised koordinaadid
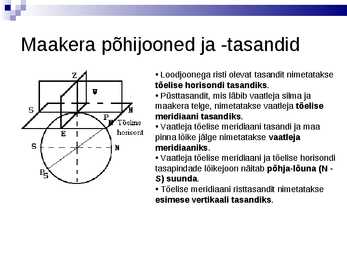
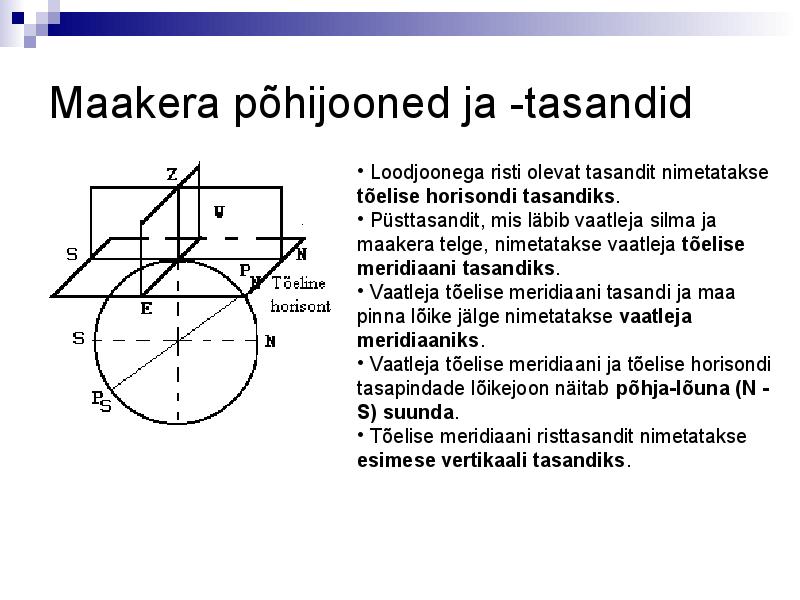
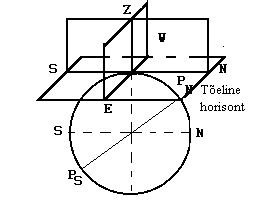
Maakera põhijooned ja -
tasandid • Loodjoonega risti olevat
tasandit nimetatakse
tõelise horisondi tasandiks.
• Püsttasandit, mis läbib vaatleja silma ja
maakera telge, nimetatakse vaatleja
tõelise
meridiaani tasandiks.
• Vaatleja tõelise meridiaani tasandi ja maa
pinna lõike jälge nimetatakse
vaatleja
meridiaaniks.
• Vaatleja tõelise meridiaani ja tõelise horisondi
tasapindade lõikejoon näitab
põhja-lõuna (N -
S) suunda.
• Tõelise meridiaani risttasandit nimetatakse
esimese vertikaali tasandiks.
Horisondi jagamise süsteemid
Purjelaevade ajastul jaotati
horisont 32
osaks, mida nimetati rumbideks.
Rumbe põhi (N), lõuna (S), ida (E) ja lääs
(W) nimetati
pearumbideks, rumbe kirre
(NE), kagu (SE), edel (SW) ja loe (NW) -
veerand-rumbideks.
Meresõidu arenedes osutus horisondi
jaotus rumbisüsteemis liiga ebatäpseks.
Asendati see
veerandringi süsteemiga,
milles iga horisondi veerand jaotati 90°
kraadiks. Suundi hakati lugema
peasuundadest N ja S paremale ja
vasakule poole näit. 45°NE; 34°SW
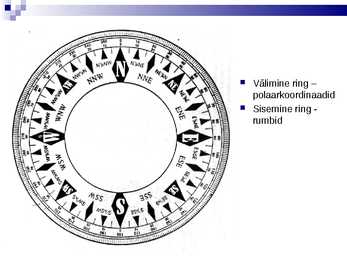
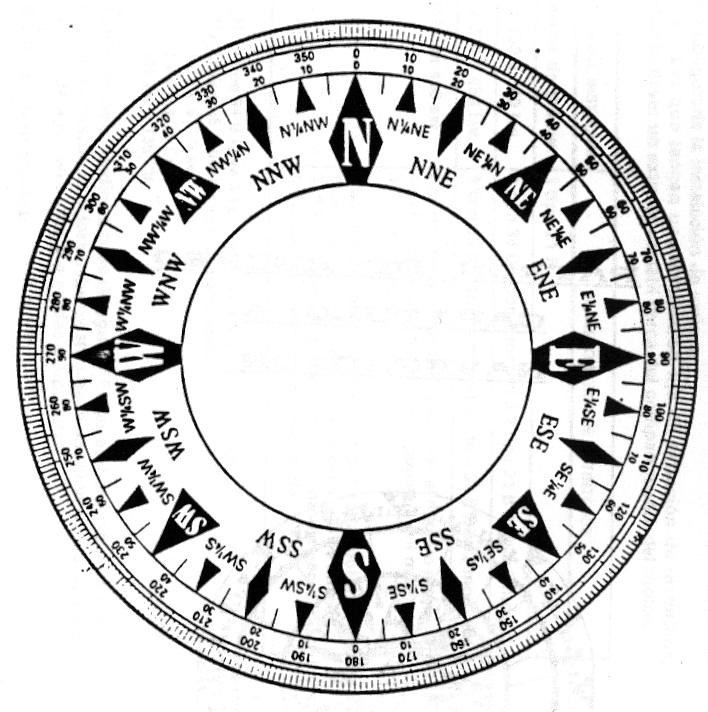
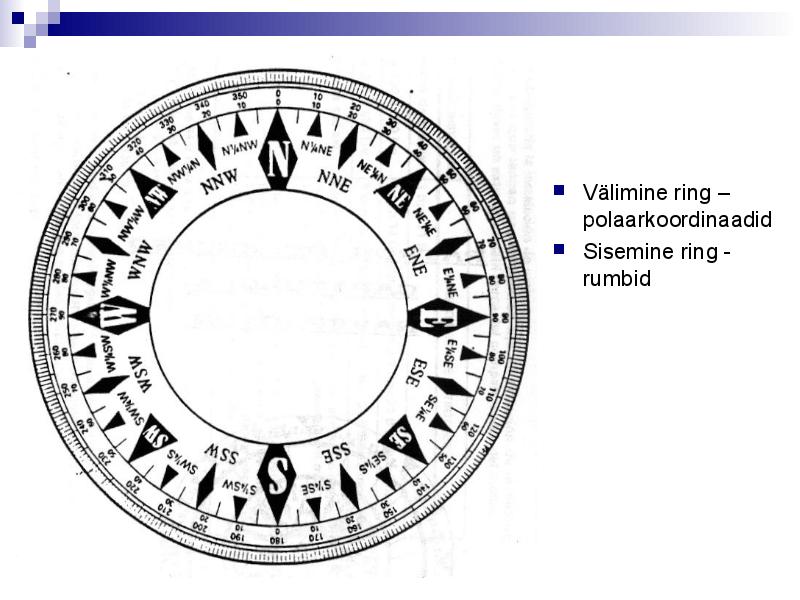
20. sajandi alguses asendati veerandringi
süsteem
ringskaala süsteemiga, milles
horisont jaotatakse põhja
suunast päripäeva 360 kraadiks.
Välimine ring –
polaarkoordinaadid
Sisemine ring -
rumbid Tõeline
kurss , tõeline
peiling ja
kursinurk
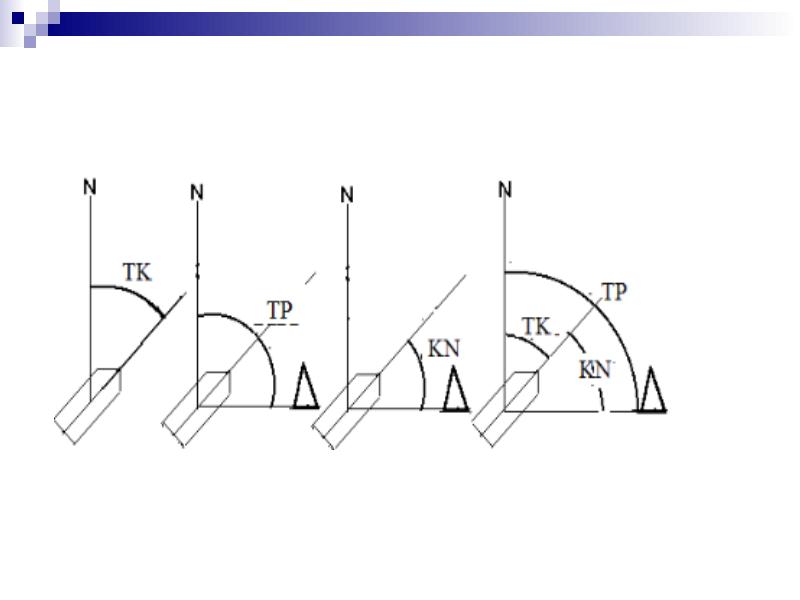
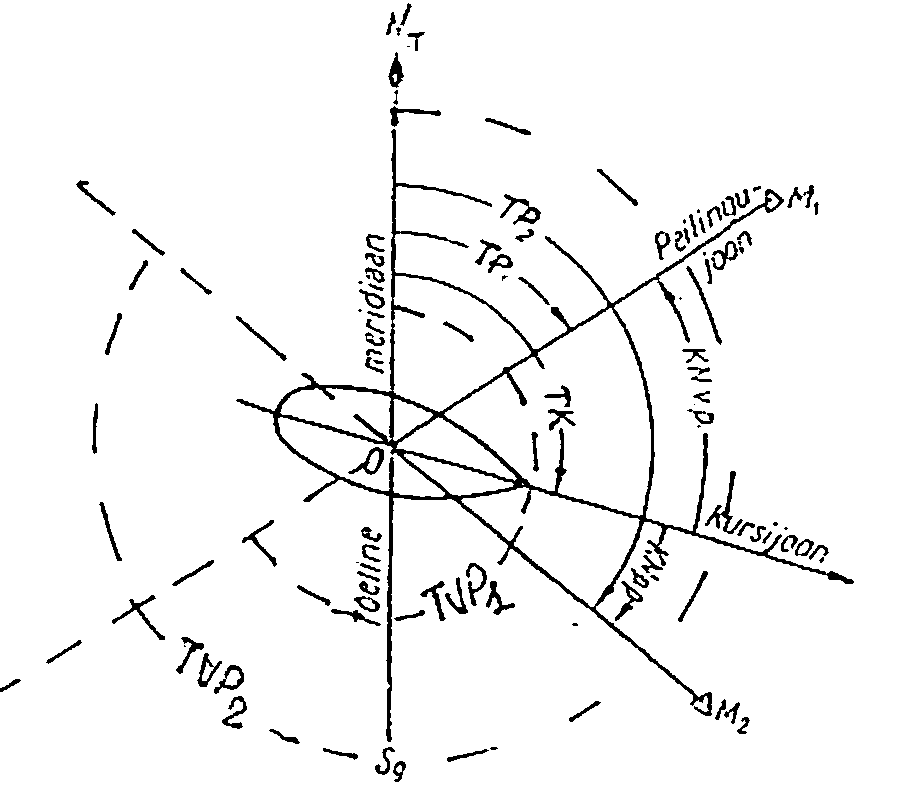
Tõeline kurss (TK) - tõelise meridiaani tasandi
põhjasuuna ja laeva pikitasandi vööripoolse
suuna vaheline kahetahuline nurk, mida
mõõdetakse päripäeva 0° - 360°.
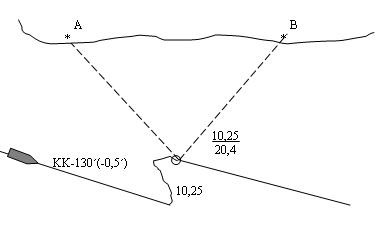
Tõeline peiling (TP) - tõelise meridiaani tasandi
põhjasuuna ning vaatleja silma ja objekti läbiva
püsttasandi vaheline kahetahuline nurk, mida
mõõdetakse 0° - 360°.
Kursinurk (KN) - laeva vööripoolse pikitasandi ning
vaatleja silma ja objekti läbiva püsttasandi
vaheline kahetahuline nurk. Rannanavigatsioonis
mõõdetakse kursinurka laeva pikitasandi
vööripoolsest osast paremale ja vasakule 0°-180°.
Seejuures lisatakse kursinurga arvväärtusele
nimetus parempoord (pp) vôi vasakpoord (vp).
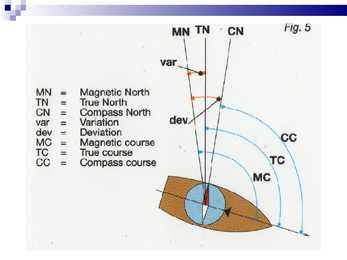
Tõeline kurss, tõeline peiling ja kursinurk
seostuvad:
TP = TK + KN (pp)
TP = TK - KN (vp)
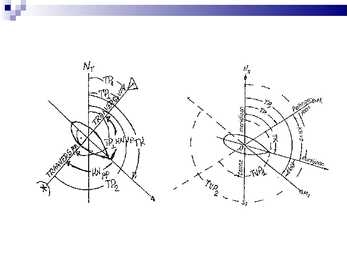
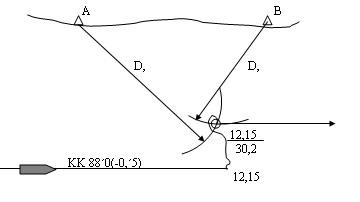
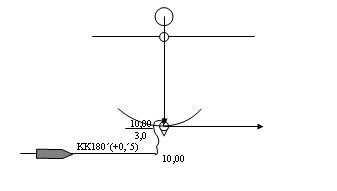
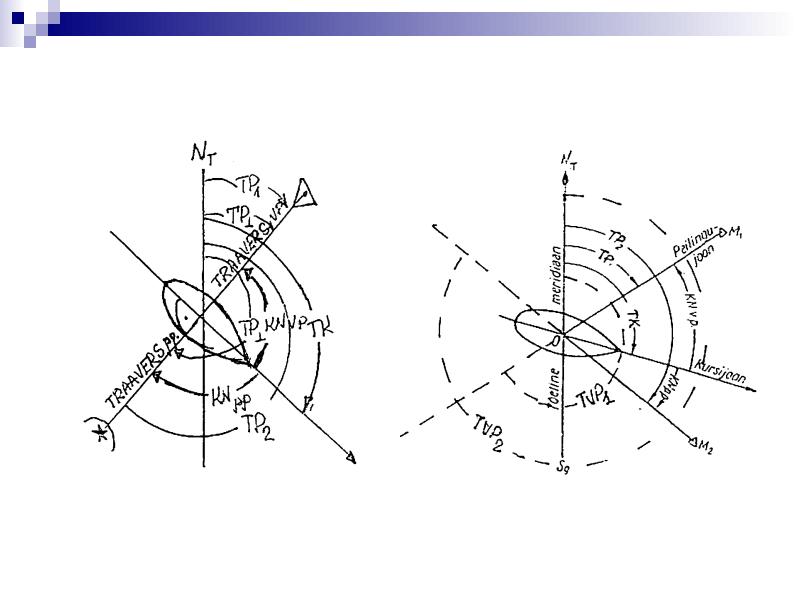
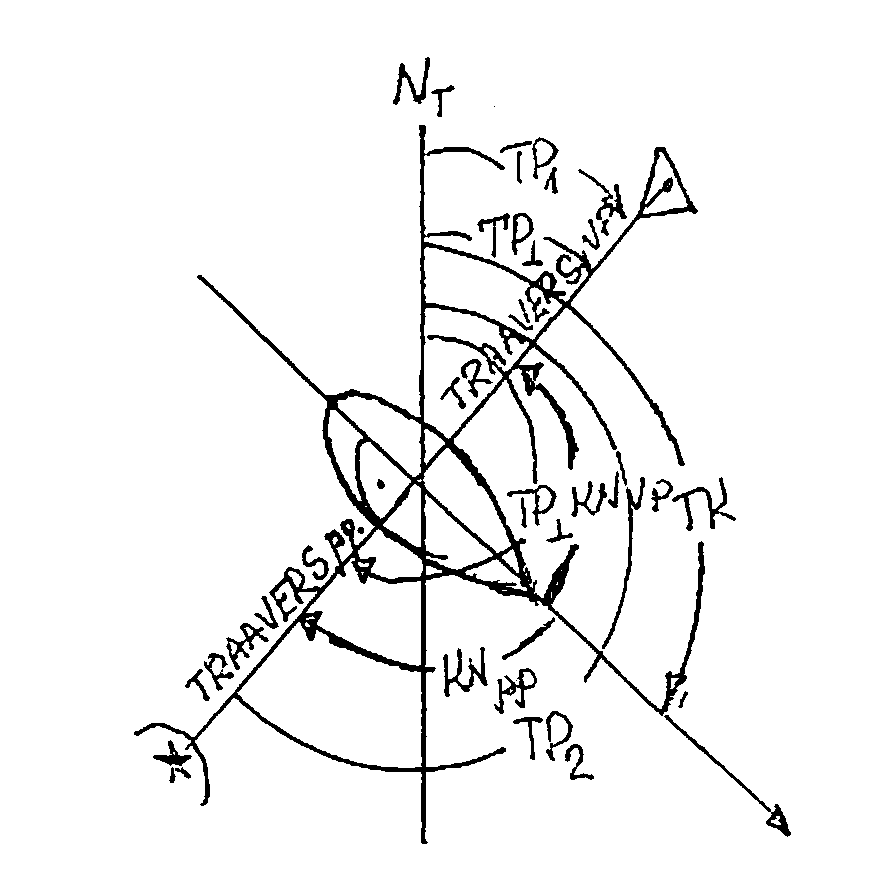
Tõeline vastaspeiling,
traavers
TRAAVERSIKS nimetatakse laeva diametraaltasapinnale ristset suunda, st
eseme kursinurk KN =90° kas vasakus või paremas poordis. Paremas
poordis +90°. vasakus poordis -90° .
Traaversi kaugus on lühim kaugus, millega möödutakse antud kursil
majakast, tuletornist või esemest, märgime
Tõeliseks vastaspeilinguks (TVP) on päripäeva loetud nurk tõelise
meridiaani Npoolse osa ja esemelt laeva kompassi suuna vahel või
tõelisest peilingust 180
° võrra erinev suuras.
TVP = TP ± 180° või TP = TVP ± 180°
Maa
magnetism Maad ümbritseb magnetväli, mille olemasolu
saab tõestada magnetnõela abil.
Vabalt ülesriputatud magnetnõela keskjoont
läbiva püsttasandi ja tõelise horisondi lõikejoont
nimetatakse
magnetmeridiaaniks.
Magnetmeridiaani suund ei ühti tõelise
meridiaani suunaga, sest
Maa magnetpoolused
ei lange kokku geograafiliste poolustega.
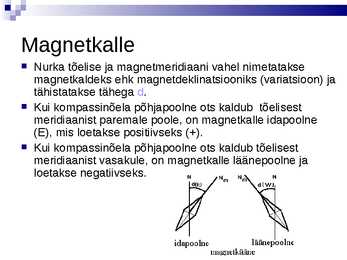
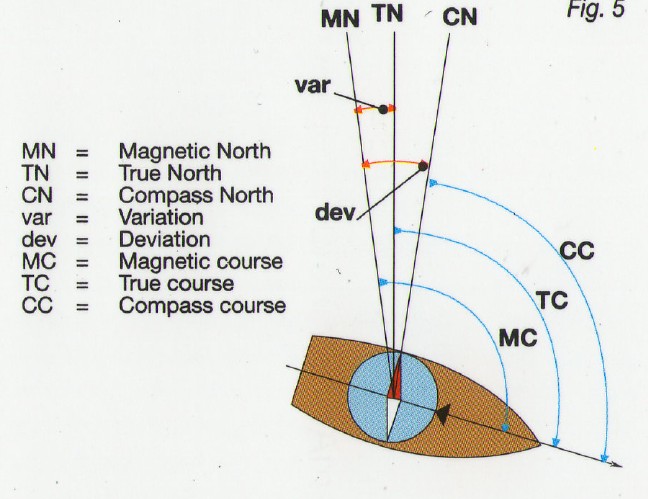
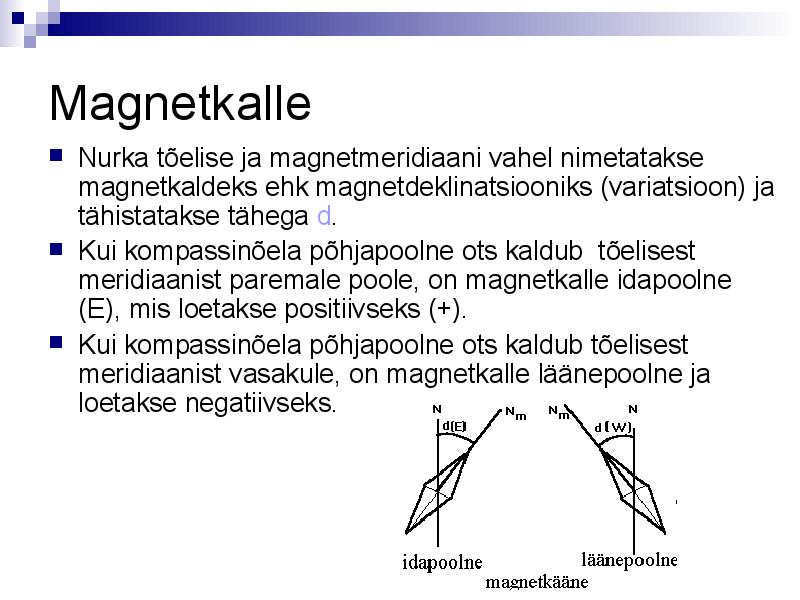
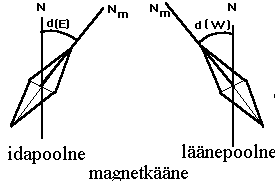
Magnetkalle
Nurka tõelise ja magnetmeridiaani vahel nimetatakse
magnetkaldeks ehk magnetdeklinatsiooniks (
variatsioon ) ja
tähistatakse tähega d.
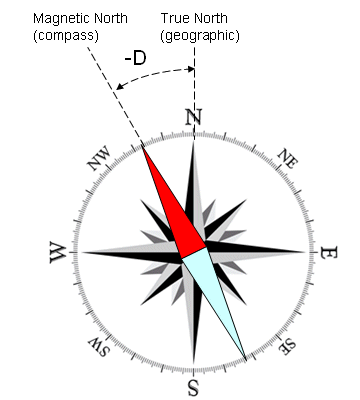
Kui kompassinõela põhjapoolne ots
kaldub tõelisest
meridiaanist paremale poole, on magnetkal e idapoolne
(E), mis loetakse positi vseks (+).
Kui kompassinõela põhjapoolne ots kaldub tõelisest
meridiaanist vasakule, on magnetkal e läänepoolne ja
loetakse negati vseks.
Magnetkalle muutub perioodiliselt. Et meresõitja saaks
määrata magnetkalde väärtuse alati mistahes ajal, on
merekaartidel näidatud magnetkalde väärtus, määramise
aasta ja aastane muutus.
Magnetkalde väärtuse arvutamisel kindlaks aastaks tuleb
määrata õiend, mis saadakse aastate vahe korrutamisel
magnetkalde muutumise kiirusega.
Näide: kaardil on näidatud magnetkalle väärtus 1975 aastal
4°,8 W. Aastane vähenemine 0°,04.
Määrata magnetkalde väärtus aastal 1993.
Dd = - 0°,04* (1993 - 1975) = - 0°,72 - 0°,7
d1993 = 4°,8 - 0°,7 = 4°,1
Magnetkalde väärtus arvutatakse täpsusega 0°,1.
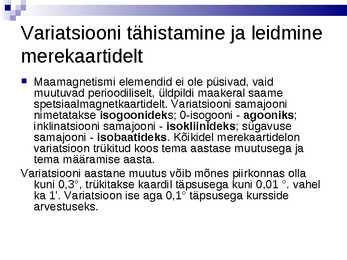
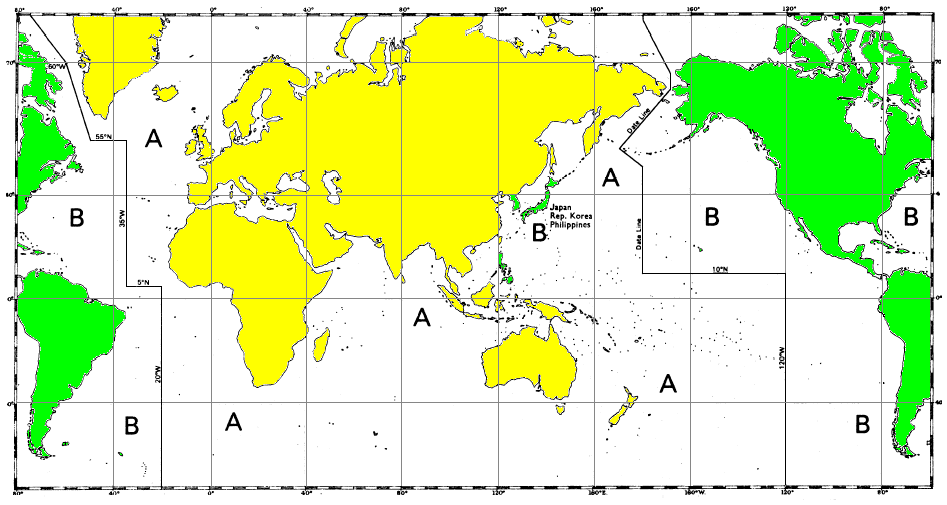
Variatsiooni tähistamine ja leidmine
merekaartidelt
Maamagnetismi elemendid ei ole püsivad, vaid
muutuvad perioodiliselt, üldpildi maakeral saame
spetsiaalmagnetkaartidelt. Variatsiooni samajooni
nimetatakse
isogoonideks; 0-isogooni -
agooniks;
inklinatsiooni samajooni -
isokliinideks; sügavuse
samajooni -
isobaatideks. Kõikidel merekaartidelon
variatsioon trükitud koos tema aastase muutusega ja
tema määramise aasta.
Variatsiooni aastane muutus võib mõnes pi rkonnas ol a
kuni 0,3°, trükitakse kaardil täpsusega kuni 0,01 °. vahel
ka 1'. Variatsioon ise aga 0,1° täpsusega
kursside arvestuseks .
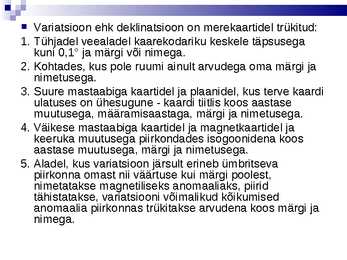
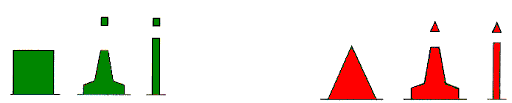
Variatsioon ehk deklinatsioon on merekaartidel trükitud:
1. Tühjadel veealadel kaarekodariku
keskele täpsusega
kuni 0,1° ja märgi või nimega.
2. Kohtades, kus pole ruumi ainult arvudega oma märgi ja
nimetusega.
3. Suure mastaabiga kaartidel ja plaanidel, kus terve kaardi
ulatuses on ühesugune - kaardi ti tlis koos aastase
muutusega, määramisaastaga, märgi ja nimetusega.
4. Väikese mastaabiga kaartidel ja magnetkaartidel ja
keeruka muutusega pi rkondades isogoonidena koos
aastase muutusega, märgi ja nimetusega.
5. Aladel, kus variatsioon järsult erineb ümbritseva
pi rkonna omast ni väärtuse kui märgi poolest,
nimetatakse magnetiliseks anomaaliaks, pi rid
tähistatakse, variatsiooni võimalikud kõikumised
anomaalia pi rkonnas trükitakse arvudena koos märgi ja
nimega.
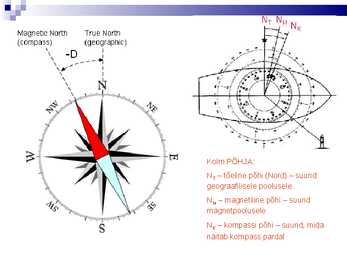
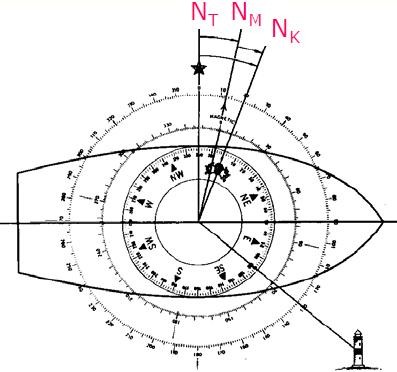
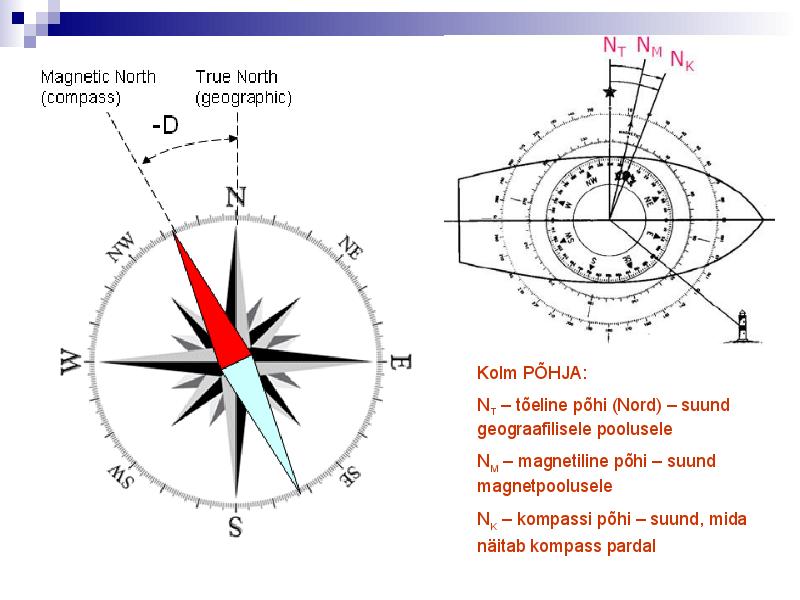
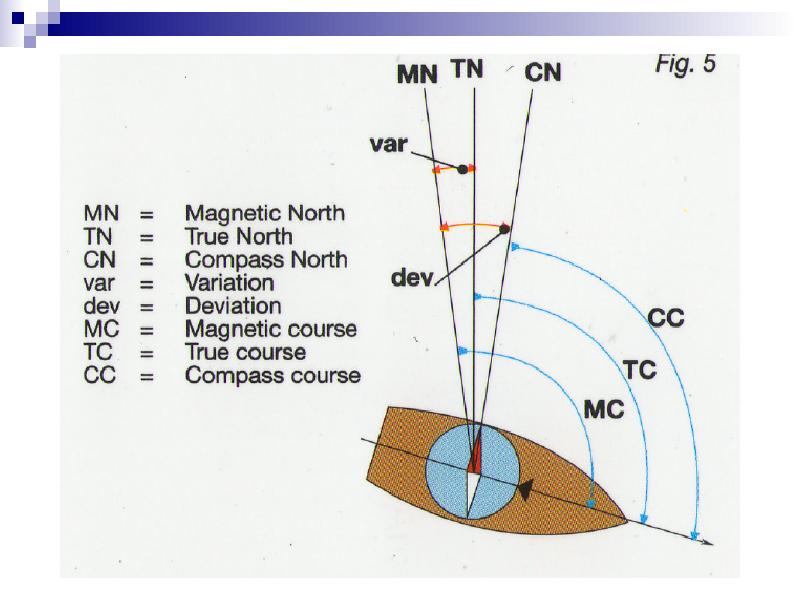
Kolm PÕHJA:
N – tõeline põhi (Nord) – suund
T
geograafilisele poolusele
N – magnetiline põhi – suund
M
magnetpoolusele
N – kompassi põhi – suund, mida
K
näitab kompass pardal
Magnetkurss, magnetpeiling
Magnetkursiks nimetatakse nurka magnetmeridiaani
põhjasuuna ja laeva pikitasandi vööripoolse suuna vahel.
Magnetpeilinguks nimetatakse nurka magnetmeridiaani
ja vaatleja silma ning mingit objekti läbiva püsttasandi
vahel.
Kui mingisugune suund merel on määratud
magnetmeridiaani suhtes, on kerge leida ka tõeline
suund järgmiste valemite abil:
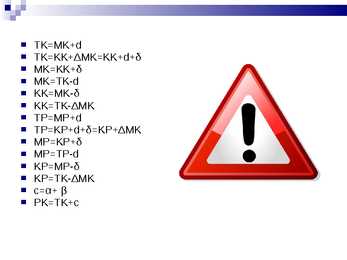
TK = MK + d
TP = MP + d
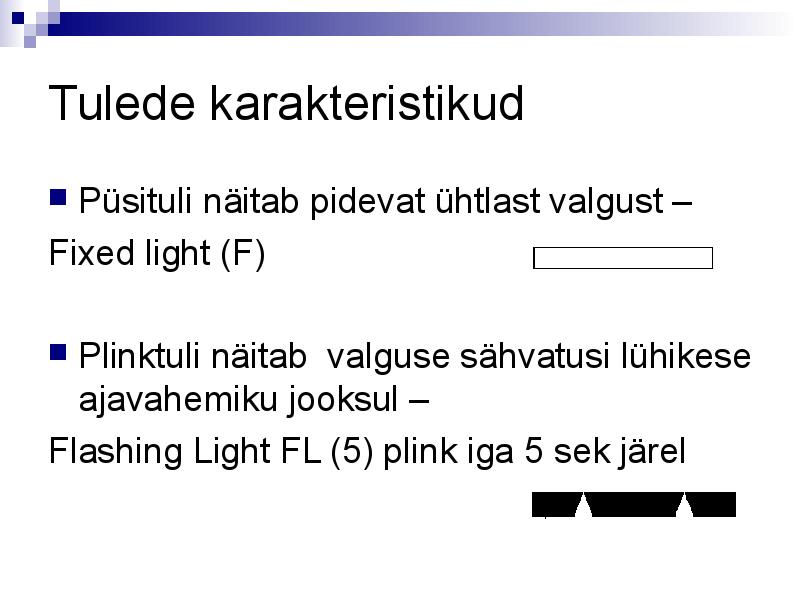
Magnetkompass
Magnetkompassi kasutatakse merel laevadel kursinäitajatena ja laeva asukoha
määramiseks.
Magnetkompassi tööpõhimõte seisneb vabalt pöörleval magnetnaelal mis
toetub vertikaalselt asetsevale teljele.
Magnetkompassid võib jagada:
1.
laeva-,
2.
kaatri-,
3.
paadikompassideks.
Magnetkompassi põhiosad on:
magnetkompassikatel koos
kompassikodarikuga (see on tundlik element
kompassis);
•
kompassijalg koos
deviatsiooni kompenseerimisseadmega (neutraliseerimaks
laeva enda metallist tulenevat magnetismi, on jala sisse asetatud 2 gruppi magneteid.
Kompassijalg asetatakse alusel täpselt diametraaltasapinnale).
•
peilingaator, et määrata kursinurk ja peiling.
Kurss võetakse kaarekodarikult vööri kursijoonelt.
Peiling võetakse kaarekodarikult peilingaatori abil prismast läbi.
Kursinurk võetakse
asimutaadiringilt peilingaatori abil.
Kompassi asimutaadiringil asuv tehase nr. peab “vaatama”
ahtri poole.
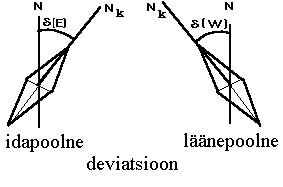
Magnetkompassi
deviatsioon
Laevas asuvale magnetkompassi mõjutab lisaks
maamagnetismile ka laeva oma magnetväli. Sel e
magnetvälja mõjul kaldub magnetkompassi nõel kõrvale
magnetmeridiaani suunast. Laevaraua magnetiseerumist
nimetatakse
magnetiliseks induktsiooniks.
Kompassinõela telge läbiva püsttasandi lõikejoont tõelise
horisondi tasandiga nimetatakse
kompassimeridiaaniks.
Nurka magnetmeridiaani ja kompassimeridiaani vahel
nimetatakse
magnethälbeks ehk deviatsiooniks, mida
tähistatakse kreeka tähega δ.
Vastavalt eeskirjadele kompassi deviatsioon meresõidul
ei või ületada ±5 kraadi. Sel epärast see hävitatakse või
kompenseeritakse.
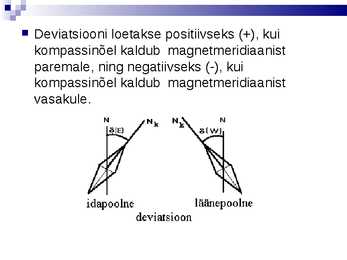
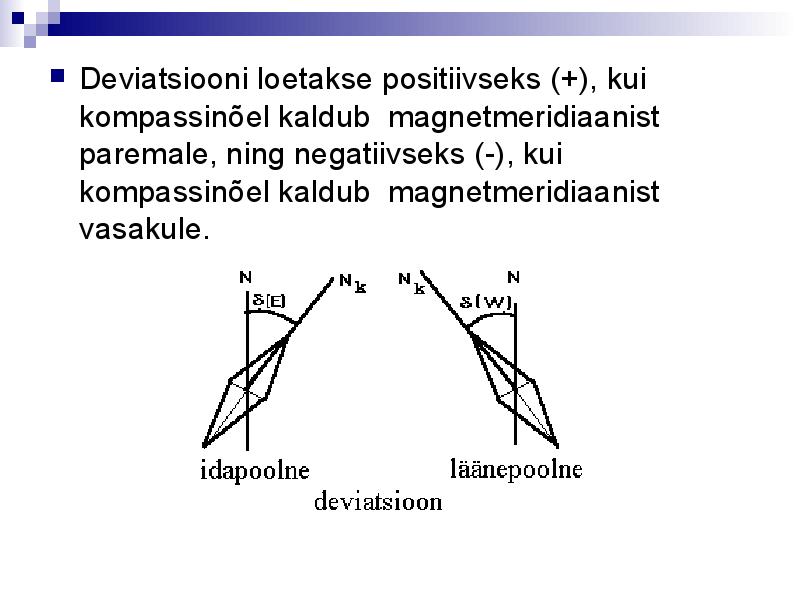
Deviatsiooni loetakse positi vseks (+), kui
kompassinõel kaldub magnetmeridiaanist
paremale, ning negati vseks (-), kui
kompassinõel kaldub magnetmeridiaanist
vasakule.
Nurka kompassimeridiaani põhjapoolse suuna ja
laeva pikitasandi vööripoolse suuna vahel
nimetatakse
kompassikursiks.
Nurka kompassimeridiaani ja vaatleja silma ning
mingit objekti läbiva püsttasandi vahel
nimetatakse
kompassipeilinguks.
Magnet- ja kompassisuundade vahel valitsevad
seosed:
MK = KK + δ
MP = KP + δ
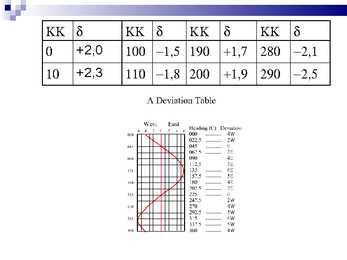
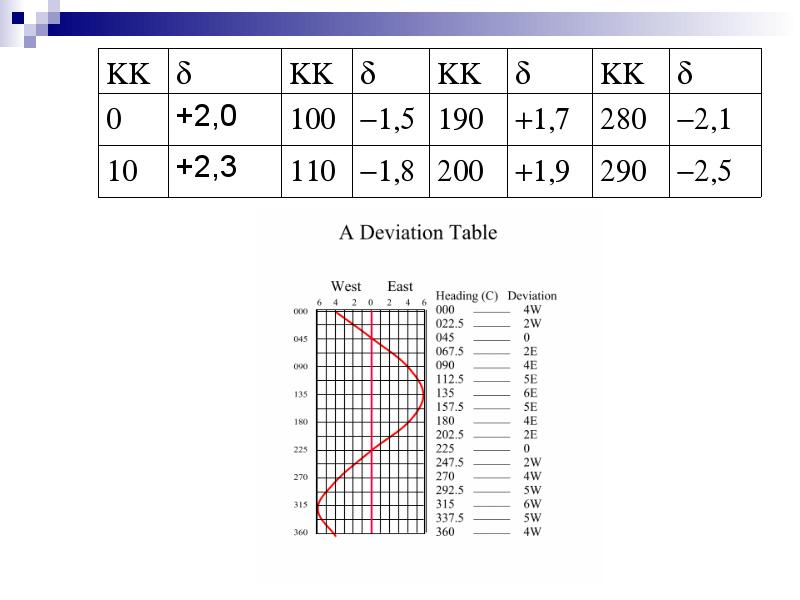
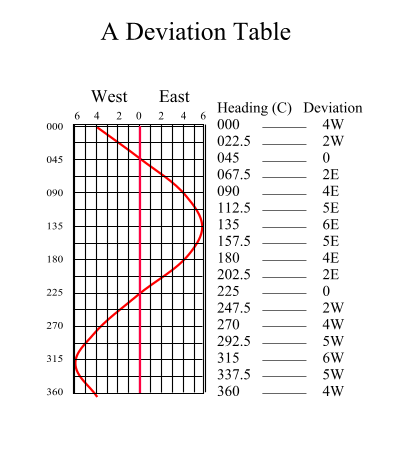
Deviatsiooni väärtus määratakse
deviatsioonitabelite abil.
ΚΚ δ
ΚΚ δ
ΚΚ δ
ΚΚ δ
0
+2,0
100 −1,5 190 +1,7 280 −2,1
10 +2,3
110 −1,8 200 +1,9 290 −2,5
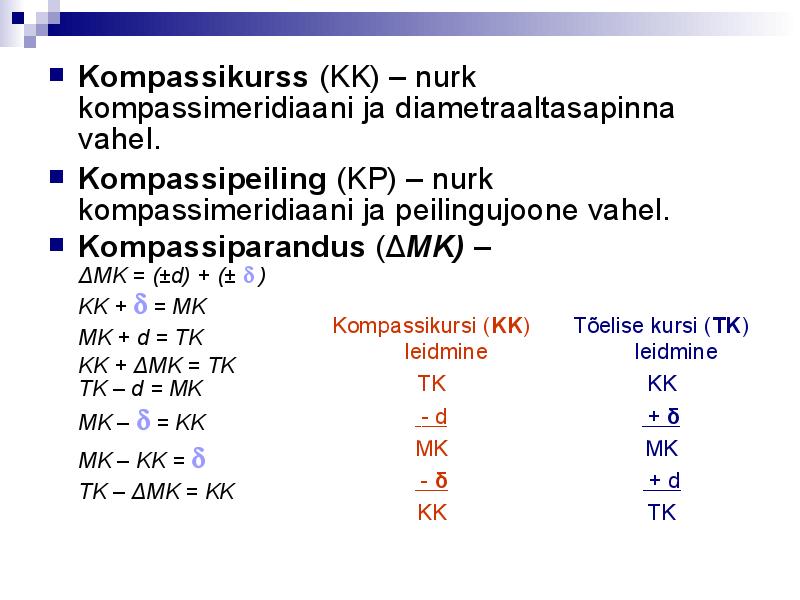
Kompassikurss (KK) – nurk
kompassimeridiaani ja diametraaltasapinna
vahel.
Kompassipeiling (KP) – nurk
kompassimeridiaani ja peilingujoone vahel.
Kompassiparandus (Δ
MK) –
ΔMK = (±d) + (± δ
)
KK + δ
= MK
MK + d = TKKompassikursi (
KK)
Tõelise kursi (
TK)
KK + ΔMK = TK leidmine
leidmine
TK – d = MKTK
KK
MK – δ
= KK - d
+
δMK – KK = δ
MK
MK
TK – ΔMK = KK -
δ + d
KK
TK
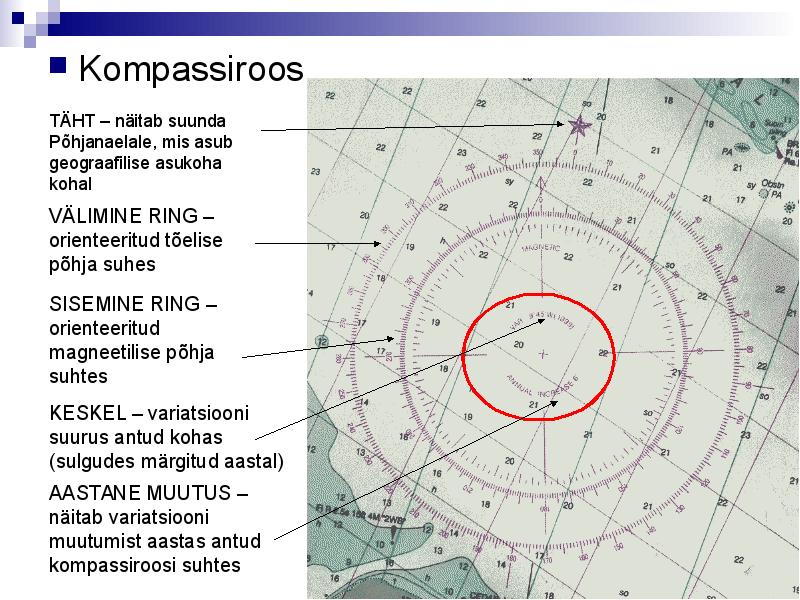
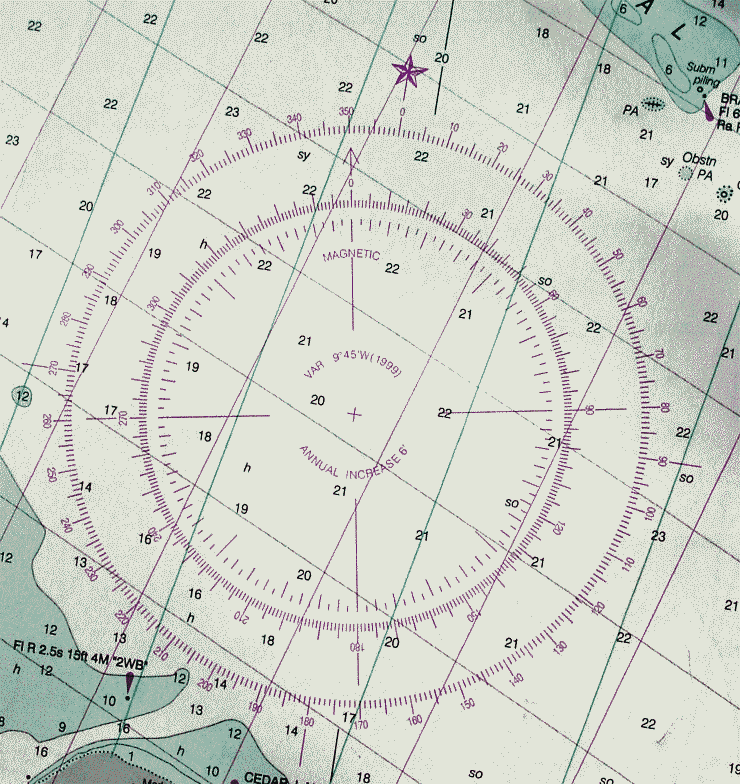
Kompassiroos
TÄHT – näitab suunda
Põhjanaelale, mis asub
geograafilise asukoha
kohal
VÄLIMINE RING –
orienteeritud tõelise
põhja suhes
SISEMINE RING –
orienteeritud
magneetilise põhja
suhtes
KESKEL – variatsiooni
suurus antud kohas
(sulgudes märgitud aastal)
AASTANE MUUTUS –
näitab variatsiooni
muutumist aastas antud
kompassiroosi suhtes
Kiiruse ja kauguse ühikud merel,
läbitud tee määramine, logid
Pikkusühikuna kasutatakse merel
meremiili – üks
meremiil võrdub Maa meridiaani ühe kaareminuti
(laiuseminuti) pikkusega. Tähistatakse 1 M; 1 nm; 1´
Meresõidu kiirusühik on
sõlm, mis tähendab kiirust
1 meremiil tunnis.
Laeva poolt läbitud tee ja laeva kiiruse mõõtmiseks
kasutatavaid riistu nimetatakse
logideks.
Mainitud logid mõõdavad laeva kiirust vee suhtes.
Meresõidus on kasutusel olnud mitmesuguseid logisid:
- käsilogi
-
mehaaniline logi - hüdrodünaamiline logi
- induktsioonlogi
- Dopplerlogi
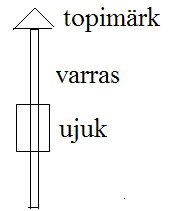
Kiirusühik on pärit aluse kiirusemõõtmise viisist ujukiga, halg (inglise
keeles
log), tünn vms, mille külge kinnitati logiliin sõlmedega. Ujuk
visati vette ja loeti liinile iga 47 jala ning 3 tolli tagant tehtud sõlmi,
mida logi tekilt sikutas 28 sekundi jooksul.
Logiõiend
Logid mõõdavad kiirust või läbitud
vahemaad teatud veaga, mida nimetatakse logiõiendiks
(∆lg).
Logiõiend väljendatakse protsentides :
S − (
LN −
LN )
∆ lg
2
1
∗100
Skus S on kaardi järgi läbitud
vahemaa Logitegur
Logiõiendi asemel võib kasutada logitegurit Klg:
∆lg
K =1 +
lg
100
Logiõiend määratakse mõõtmiilil
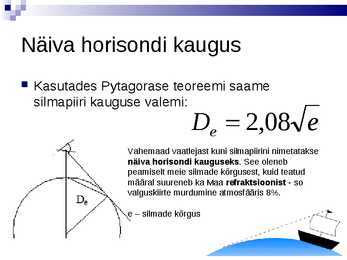
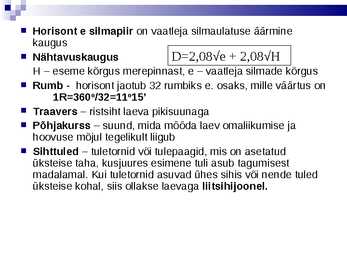
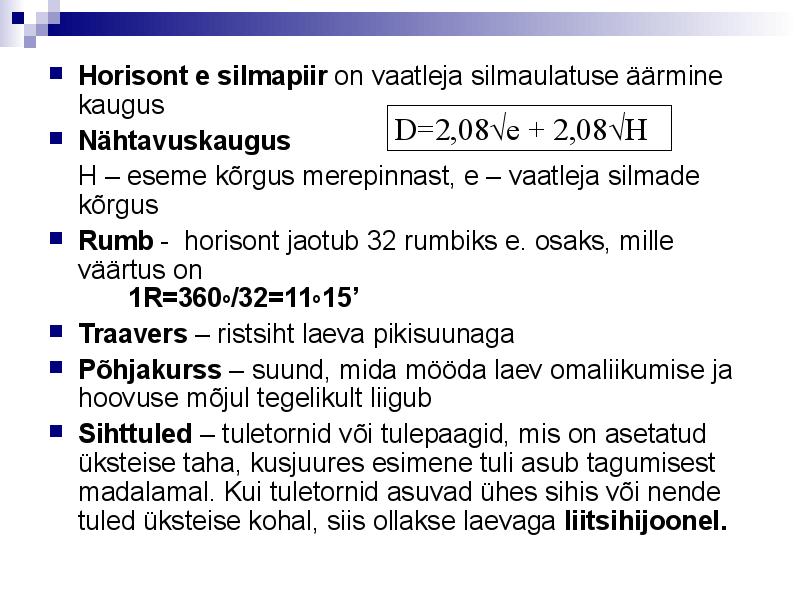
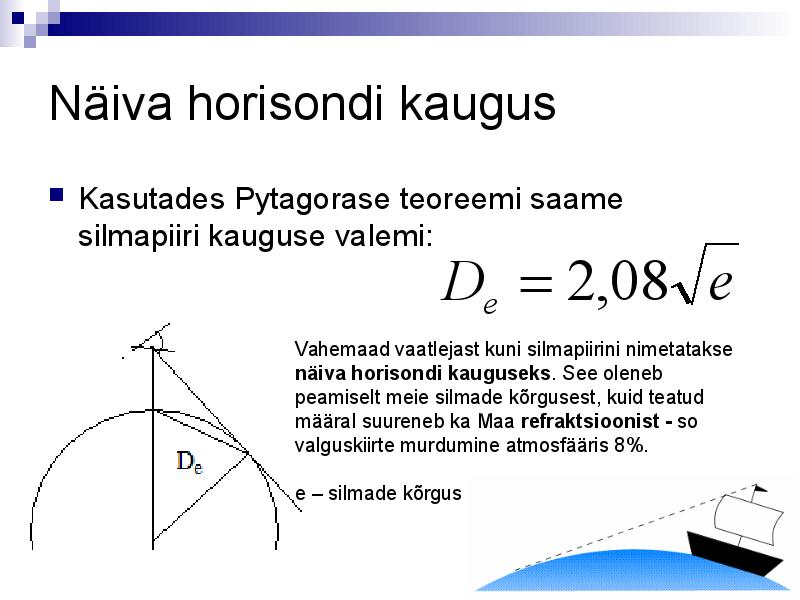
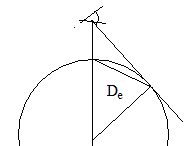
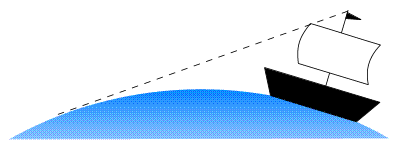
Näiva horisondi kaugus
Kasutades Pytagorase teoreemi saame
silmapiiri kauguse valemi:
D = 08
2
eeVahemaad vaatlejast kuni silmapiirini nimetatakse
näiva horisondi kauguseks. See oleneb
peamiselt meie silmade kõrgusest, kuid teatud
määral suureneb ka Maa
refraktsioonist - so
valguskiirte
murdumine atmosfääris 8%.
e – silmade kõrgus meetrites
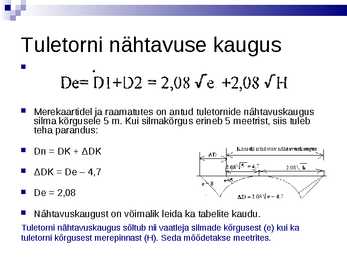
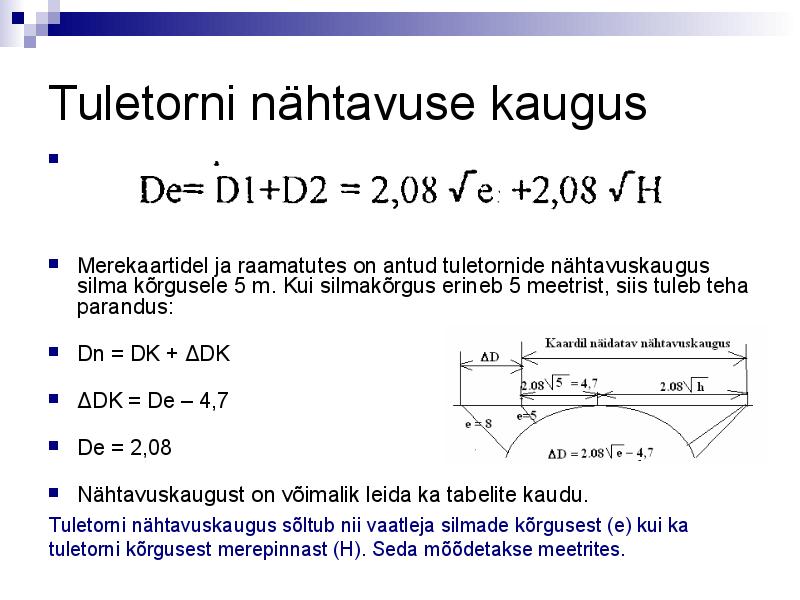
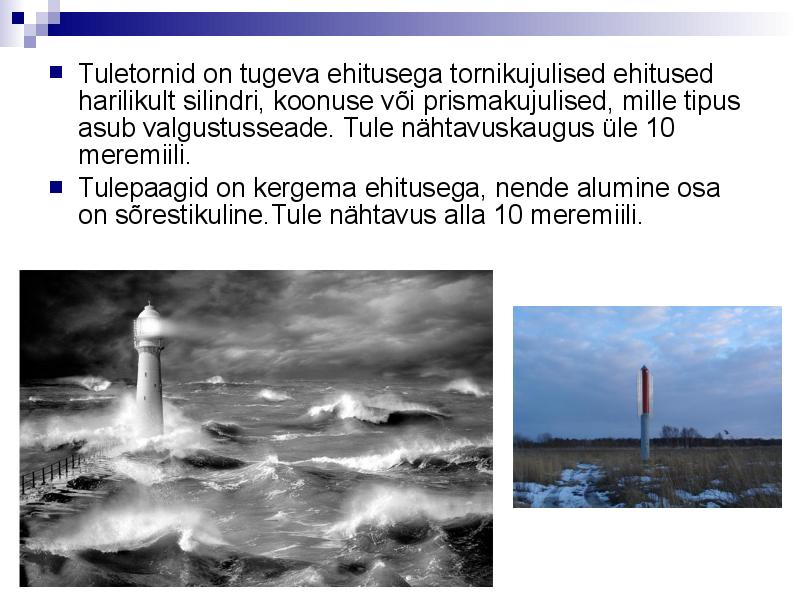
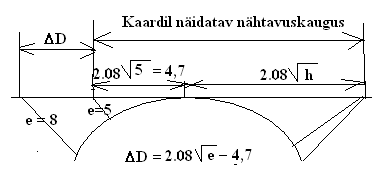
Tuletorni nähtavuse kaugus
Merekaartidel ja raamatutes on antud tuletornide nähtavuskaugus
silma kõrgusele 5 m. Kui silmakõrgus erineb 5 meetrist, siis tuleb
teha parandus:
Dn = DK + ΔDK
ΔDK = De – 4,7
De = 2,08
Nähtavuskaugust on võimalik leida ka
tabelite kaudu.
Tuletorni nähtavuskaugus sõltub nii vaatleja silmade kõrgusest (e) kui ka
tuletorni kõrgusest merepinnast (H). Seda mõõdetakse meetrites.
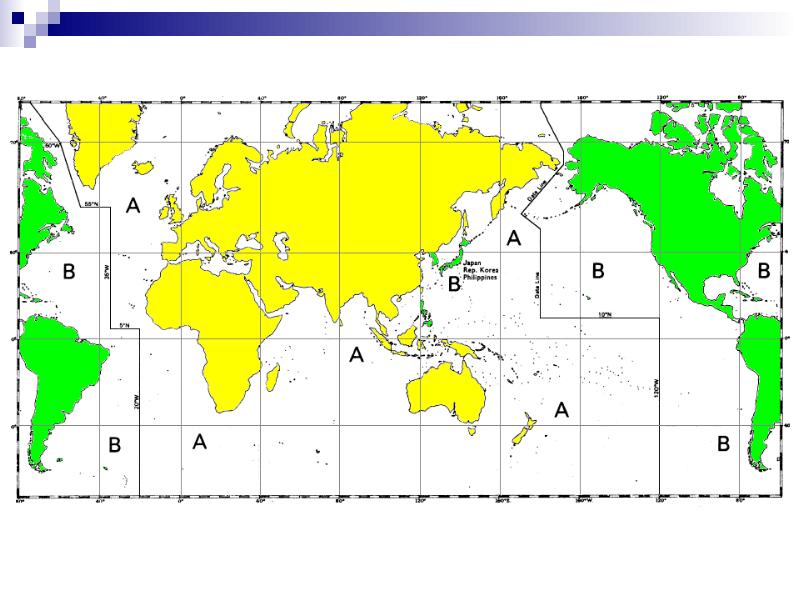
MEREKAARDID
Kaardiks nimetatakse Maa pinna või sel e mõne osa
matemaatiliselt tuletatud, vähendatud ja üldistatud
tasapinnalist kujutist.
Sferoidi ei ole võimalik tasapinnal kujutada
moonutusteta. Moonutused al uvad teatud
seaduspärasustele. See asjaolu võimaldab
koostada mingi kindla otstarbelise kaardi kõige
lihtsamal moel
Mõõtkava
Iga kaart kujutab maakera pinda või selle
osa vähendatult.
Vähendamisega seostub kaardimõõdu e.
mõõtkava mõiste.
Eristatakse arv- ja joonkaardimõõtu.
Mastaap Arvmastaap näitab, mitu pikkusühikut maa-
alal vastab ühele ühikule kaardil. Mida suurem on
nimetaja, seda väiksem on mastaap.
• Joonmastaap näitab
mitmele pikkusühikule
looduses vastab üks pikkusühik kaardil.
• Mastaabi ülim täpsus on väikseim kaugus, mida
võib kaardil mõõta.
Inimese silm eristab 0,2 mm (
pliiatsi punkt)
0,02cm (=0,2mm) x 200000 = 4000cm (40m)
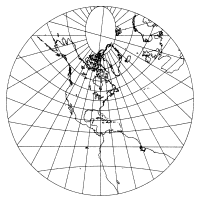
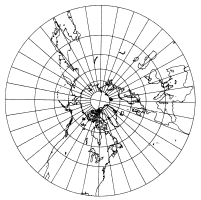
Kartograafilised projektsioonid
Kaardi koostamiseks projekteeritakse
meridiaanid, paralleelid ja Maa pinna
punktid kas silindrile, koonusele või
tasandile .
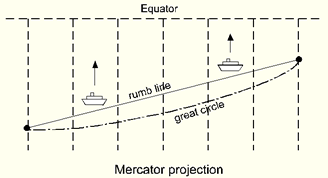
Merekaartidele esitatavad nõuded
Laeva kursijoon (loksodroom) peab olema kaardil
sirge.
Meridiaanid peavad olema
sirged ja omavahel
rööpsed ning paralleelid samuti sirged -
meridiaanidega risti.
Nurgad kartograafilisel projektsioonil peavad võrduma
nurkadega looduses.
Nendele nõuetele vastab
Merkaatori projektsioon .
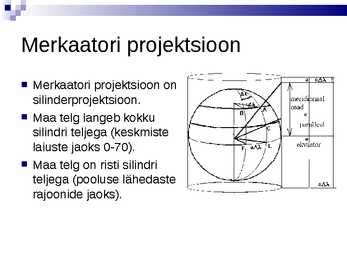
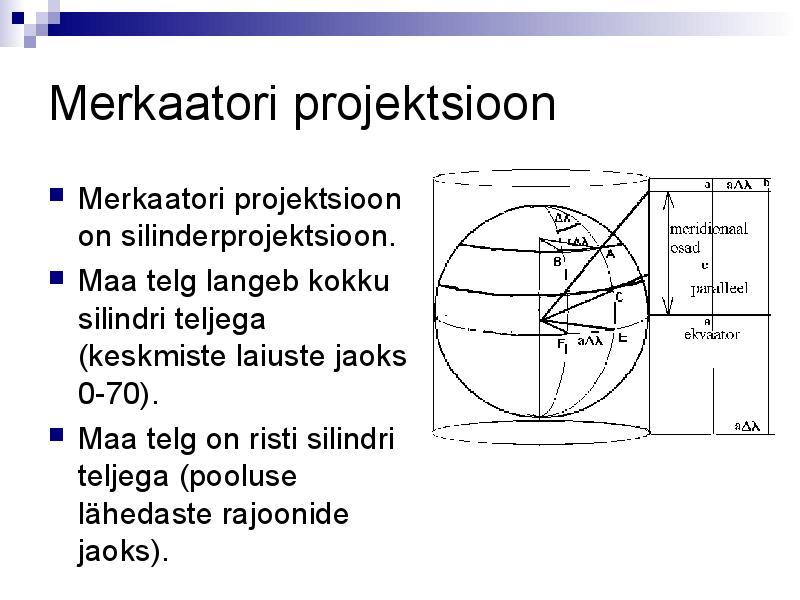
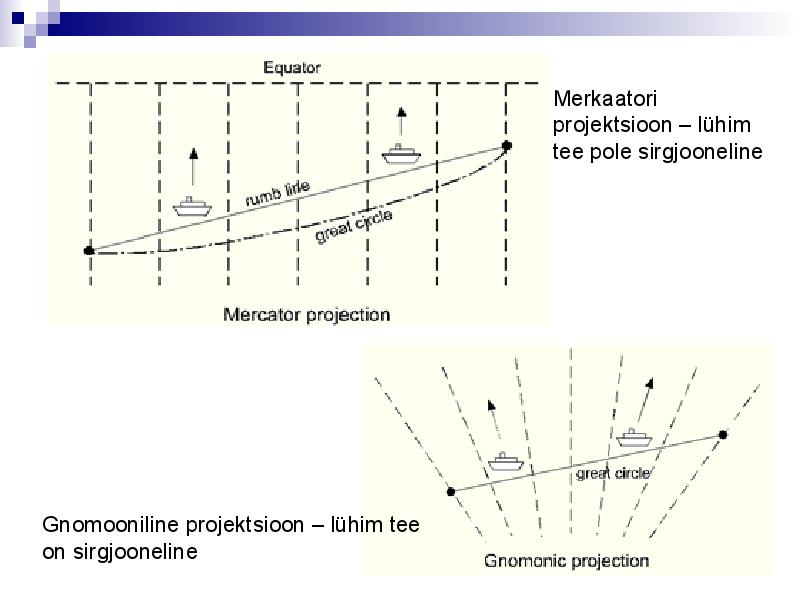
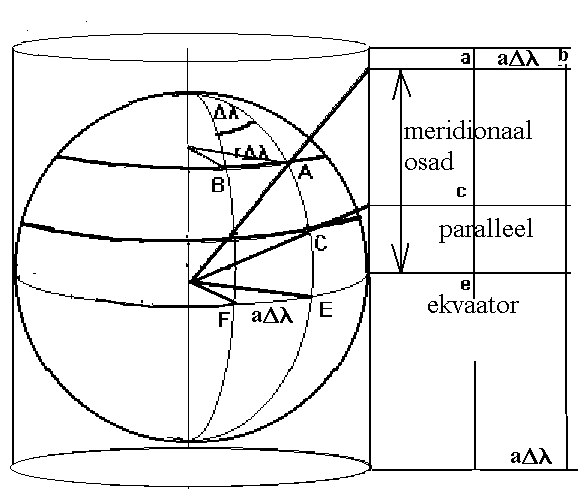
Merkaatori projektsioon
Merkaatori projektsioon on
silinderprojektsioon.
Maa telg langeb kokku
silindri teljega (keskmiste
laiuste jaoks 0-70).
Maa telg on risti silindri
teljega (
pooluse lähedaste
rajoonide jaoks).
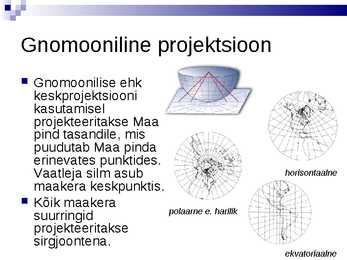
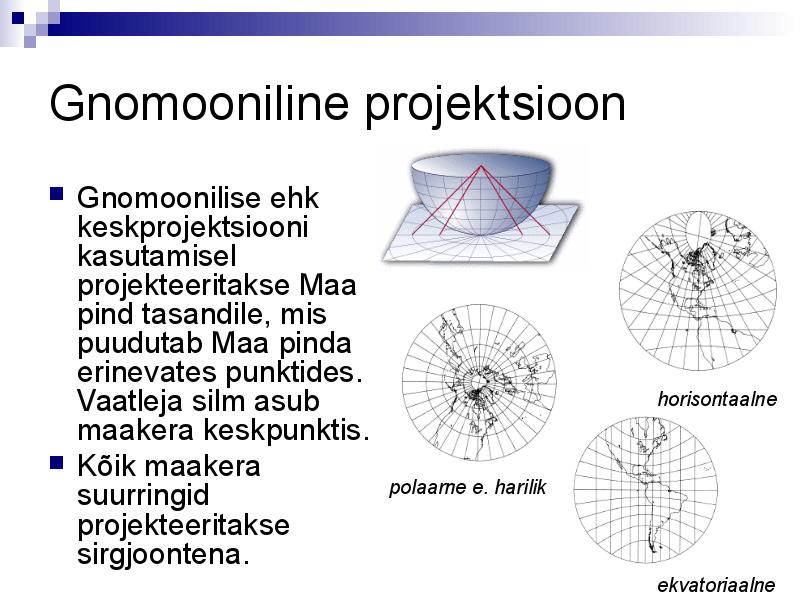
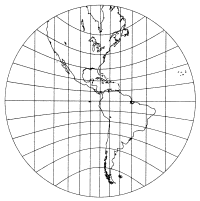
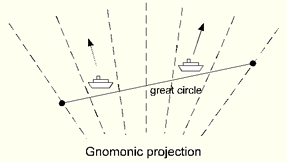
Gnomooniline projektsioon
Gnomoonilise ehk
keskprojektsiooni
kasutamisel projekteeritakse Maa
pind tasandile, mis
puudutab Maa pinda
erinevates punktides.
Vaatleja silm asub
horisontaalnemaakera
keskpunktis .
Kõik maakera
suurringid
polaarne e. harilikprojekteeritakse
sirgjoontena.
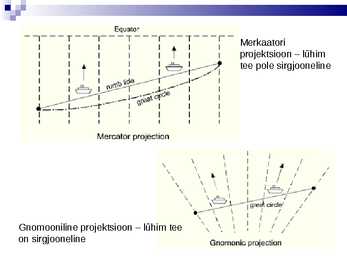
ekvatoriaalneMerkaatori
projektsioon – lühim
tee pole sirgjooneline
Gnomooniline projektsioon – lühim tee
on sirgjooneline
Navigatsioonikaardid
Generaalkaardid – laeva tee eelmärkimine
1:500000 – 1:5000000
Sõidukaardid – sõit avamerel, rannavetes
1:100000 – 1:500000
Erikaardid – sõit ranna lähedal, kitsustes
1:25000 – 1:75000
Plaanid –
sisenemine sadamatesse,
reididele 1:1000 – 1:25000
Ülevaatekaardid – erinevad andmed ookeanide,
merede kohta 1:500000 .......
Magnetkaardid – Maa magnetvälja kujutamine
1:20000000
Indekskaardid – reisiks
kaartide ja käsi-
raamatute leidmiseks 1:1000000 .......
Atlased – üksikute pi rkondade tundmaõppimiseks
Soodsate mereteede, tähistaeva, ajavööndite,
hüdrometeoroloogilised kaardid
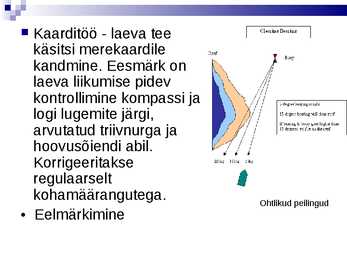
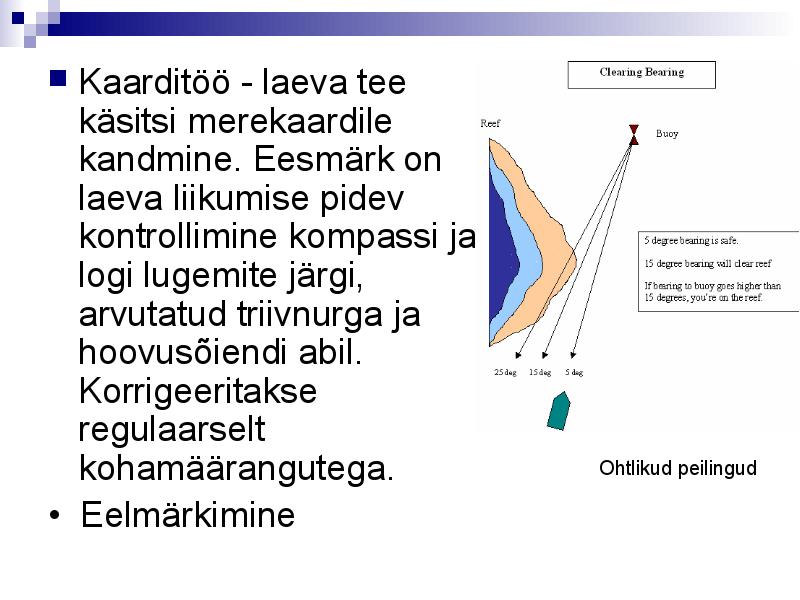
Kaarditöö
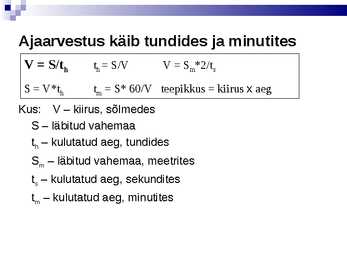
Meresõitja arvutab laeva li kumise ja määrab
laeva asukoha graafiliselt merekaardil.
Graafiliste ja analüütiliste arvutuste kogumit ning
nende ülesannete täitmist, nimetatakse
kaarditööks.
Laeva
asukohta , mis on saadud sellisel moel, et
laeva poolt läbitud tee kantakse kaardile
joonistatud laeva liikumissuunale - kursile,
nimetatakse
arvutatud ehk laagitud kohaks.
Kaarditööriistad
Paralleeljoonlaud
Transporti r
Sirklid
Pliiats
Kustutuskumm
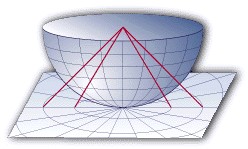
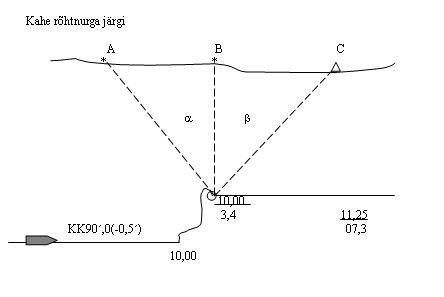
Protraktor (koha määramine rõhtnurkade järgi)
Kaardiraskused
Deviatsiooni määramine ja
hävitamine
Kord aastas või kui ületab ±5°
Kompassi asukoha muutmisel
Peale laeva remonti ja elektrikeevituste
puhul
Peale märgatavat põrutust (
kari , kai vmt)
Magnetlaiuse tunduval muutumisel
Kui laev seisab samal kursil üle kahe kuu
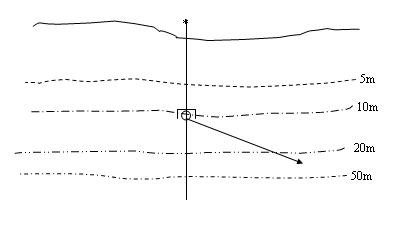
Sügavuste mõõtmine, loodid
Sügavust mõõdetakse loodidega: käsi- ja kajaloodid
Käsilood koosneb tina või malmkuulist massiga
3,5...5 kg ja selle külge kinnitatud loodliinist, mille
pikkus on 52 m.
Loodliin on jaotatud meetri kaupa. Meetrite
tähistamiseks kasutatakse erinevaid märgistusviise.
Täiskümned tähistatakse värviliste riideribadega.
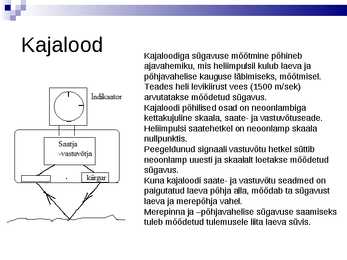
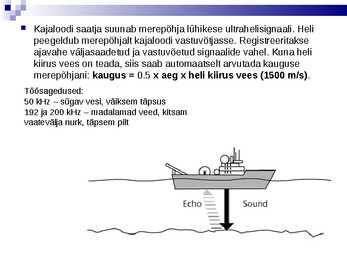
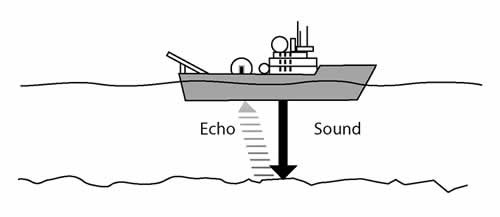
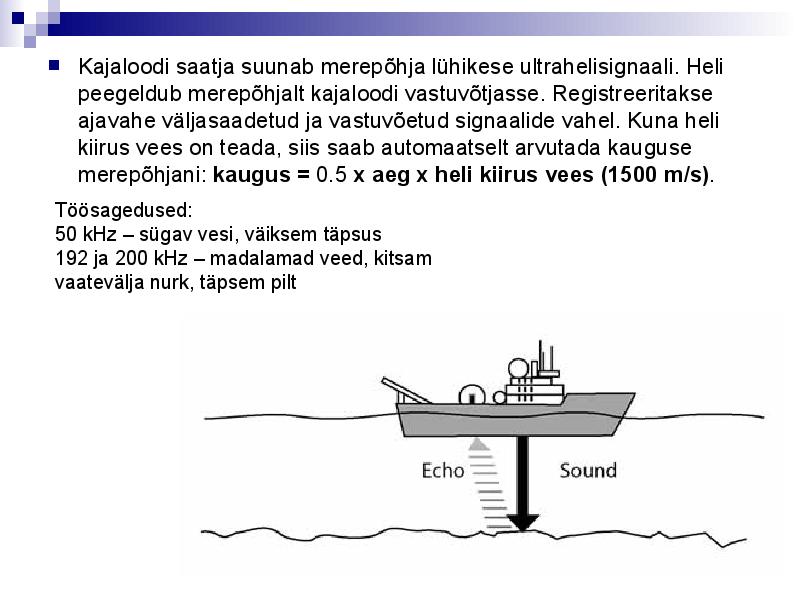
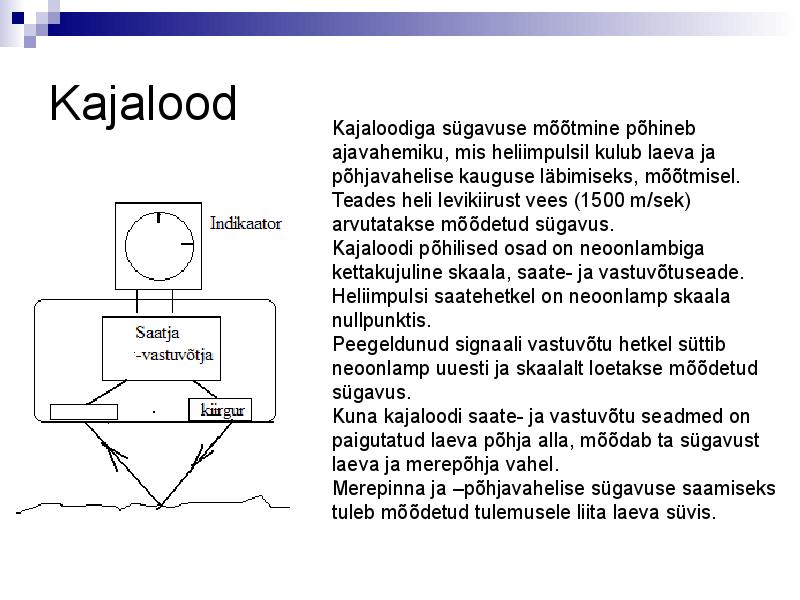
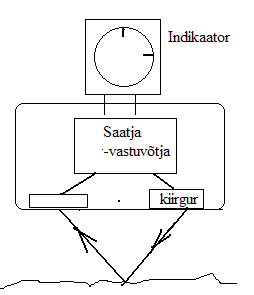
Kajalood Kajaloodiga sügavuse mõõtmine põhineb
ajavahemiku, mis heliimpulsil kulub laeva ja
põhjavahelise kauguse läbimiseks, mõõtmisel.
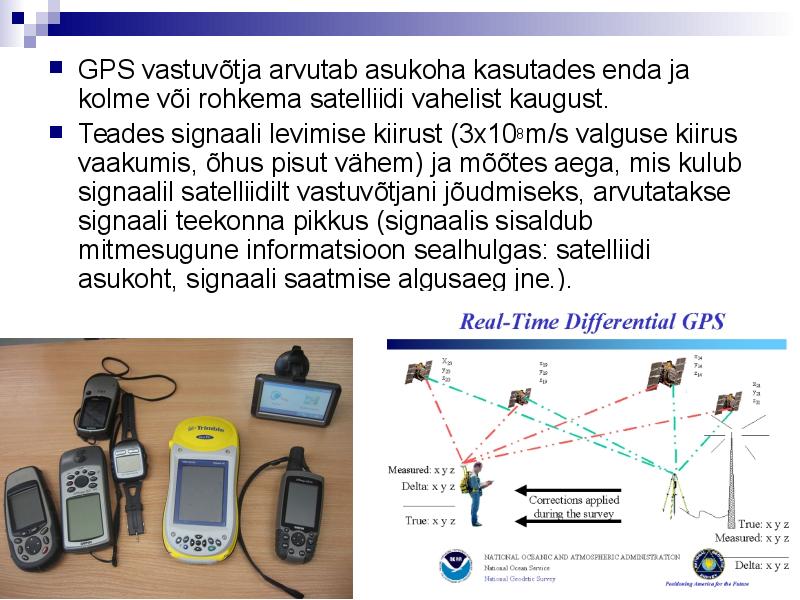
Teades heli levikiirust vees (1500 m/sek)
arvutatakse mõõdetud sügavus.
Kajaloodi põhilised osad on neoonlambiga
kettakujuline skaala, saate- ja vastuvõtuseade.
Heliimpulsi saatehetkel on neoonlamp skaala
nullpunktis.
Peegeldunud signaali vastuvõtu hetkel süttib
neoonlamp uuesti ja skaalalt loetakse mõõdetud
sügavus.
Kuna kajaloodi saate- ja vastuvõtu
seadmed on
paigutatud laeva põhja alla, mõõdab ta sügavust
laeva ja merepõhja vahel.
Merepinna ja –põhjavahelise sügavuse saamiseks
tuleb mõõdetud tulemusele liita laeva süvis.
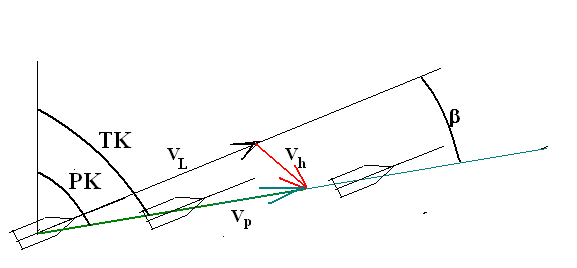
Laeva tee arvutamine
Laakimine Laeva
triiv ( α )
Hoovusõiend ( β )
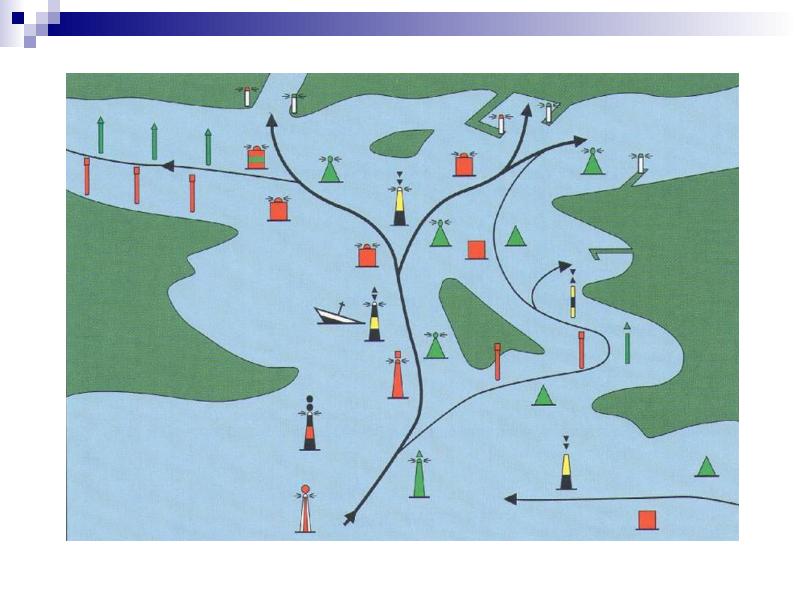
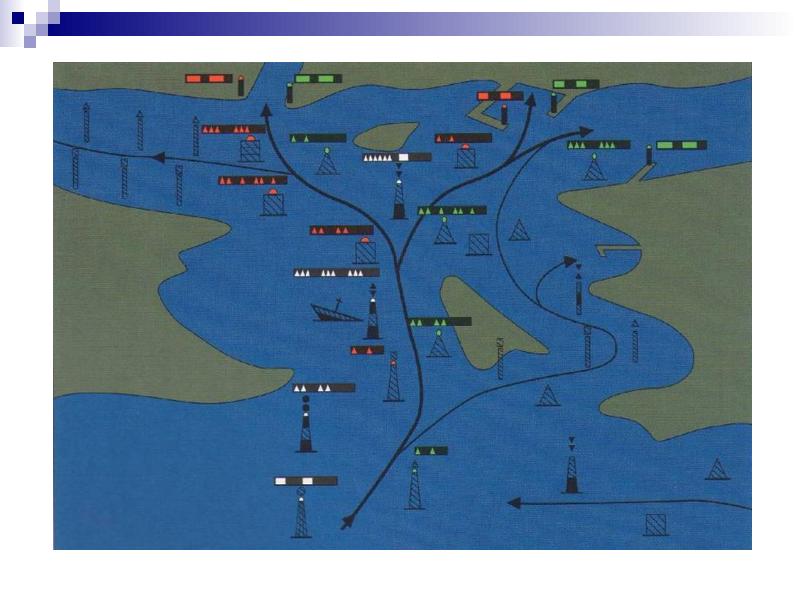
Reisiplaneerimine
Kaarditöö
Laakimine - laeva li kumise elementide
arvestamine tema asukoha määramiseks ja
kaardile kandmiseks (K; V; α; β).
Graafiline ja
analüütiline.
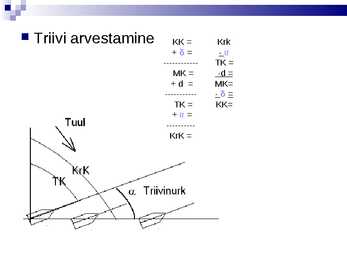
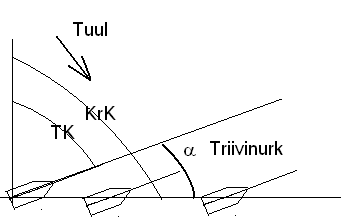
Tri v - laeva kõrvalekaldumine kursist tuule mõjul.
Tri vi suurust iseloomustab tri vinurk, so laeva
tõelise kursi ja tegeliku li kumise suuna vaheline
nurk (α). Kui tuul puhub vasakust pardast, si s on
α pluss märgiga, kui aga
paremast pardast, si s
miinus märgiga. Tri vivaks nimetatakse ka laeva,
mil el puudub merel käik, on jääs kinni või mil e
ankur ei pea.
Triivi mõjul hakkab laev
kalduma kõrvale
oma tõelisest kursist ja hakkab liikuma nn.
kaardikursi järgi. Kui muudetakse laeva
kurssi, siis muutub ka triivi nurga väärtus.
Praktiliselt on
triivinurka α võimalik
kindlaks määrata kas laeva asukoha
kindlaks määramiste abil või ka
ligikaudselt laeva kiiluvee ja laeva
diametraaltasapinna vahelise nurga
mõõtmise abil.
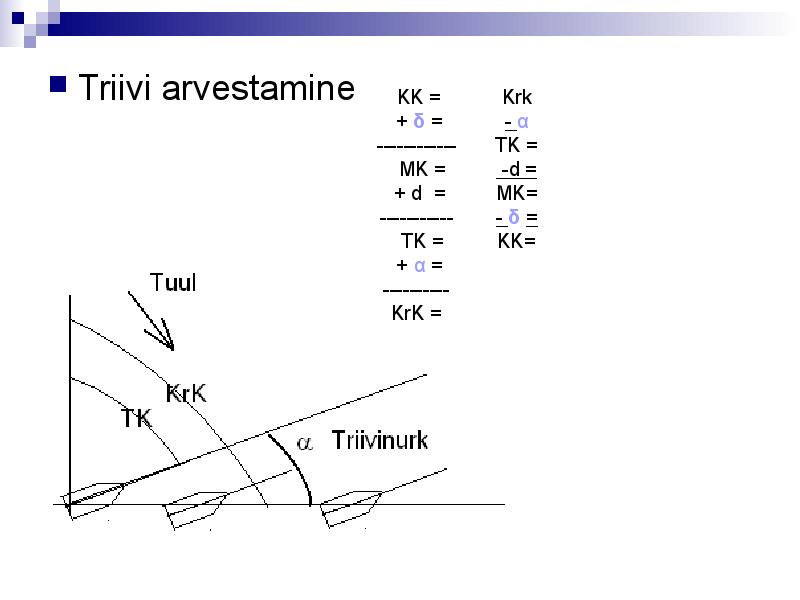
Triivi arvestamine
KK =
Krk
+
δ =
- α
------------
TK =
MK =
-d =
+ d =
MK=
-----------
-
δ =
TK =
KK=
+ α =
----------
KrK =
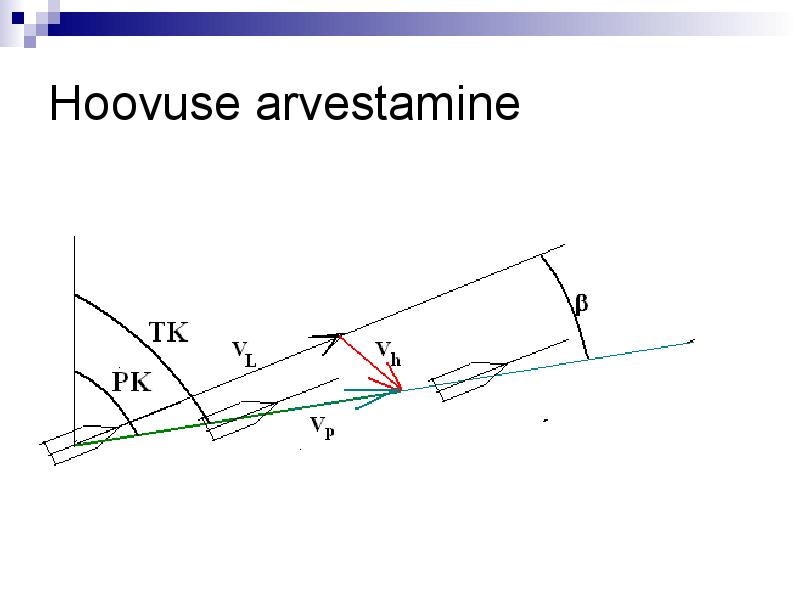
Hoovus - merehoovus on merevee
horisontaalsuunaline kulgli kumine
maailmameres. Hoovust iseloomustavad kiirus,
suund ja toime kestvus. Ki rust mõõdetakse
sõlmedes. Suunda arvestatakse ringsüsteemis
kraadides, sellesse horisondi punkti, kuhu
veemassid liiguvad. Laeva hälbimist tõelisest
kursist veemasside liikumise mõjul nimetatakse
hoovushälbeks.
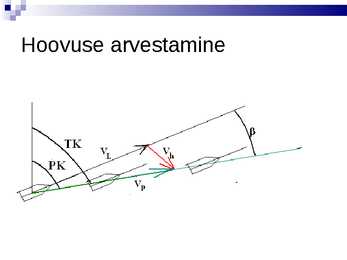
Suund, mida mööda laev li gub hoovuse mõjul
nimetatakse põhjakursiks (PK)
Nurka TK ja PK vahel nimetatakse
hoovusenurgaks (β)
Kui hoovus on pakpoordi, siis β loetakse “+”, kui
tüürpoordi, si s “-” märgiga
Seega hoovusest tingitud nurga β märk on
positiivne kui PK>TK ja miinus kui
PK




























































Kõik kommentaarid