Riigieksami küsimused navigatsioonis 2005
1. Põhilised punktid ja jooned Maa pinnal. Maakera kujutab endast pooluste suunas veidi lapikut kera või pöördellipsoidi.
Tegelikult on maakera korrapäratu geomeetriline keha, mida nimetatakse ka
gedoid´iks.
Suur
pooltelg = 6 378,24 km
Väike pooltelg = 6 356,86 km
Maakera keskmine raadius on 6 371,1 km
Maakera telg – Maa keset läbiv mõtteline telg, mille ümber ta pöörleb.
Maa geograafilised poolused – punktid, kus Maakera telg lõikab Maa pinda.
Meridiaanid – pooluseid läbivad suurringi kaared.
Ekvaator – Maakera
teljega ristuv ja maakera
keskpunkti läbiva tasandi ning Maa pinna
lõikejoon.
Paralleel –
ekvaatori rööptasandi ja Maa pinna lõikejoon.
Tõelise meridiaani tasand – püsttasand, mis läbib vaatleja silma ja maakera telge.
Vaatleja meridiaan – tõelise meridiaani tasandi ja Maa pinna lõike jälg.
Tõelise horisondi tasand – Vaatleja silma läbiv rõhttasand.
Esimese vertikaali tasand – tõelise meridiaani
risttasand .
Tõelise meridiaani ja tõelise horisondi tasapindade lõikejoon näitab ükskõik millises maakera
punktis põhja – lõuna suunda. Tõelise meridiaani risttasandi ja tõelise horisondi
tasapinna lõikejoon määrab igas maakera punktis ida – lääne suuna. Horisondi jaotusel on aluseks võetud
N – S joone suund, mida loetakse põhisuunaks.
Horisondi jagamise süsteemid
1)
täisringsüsteem –
jagab horisondi 360 kraadiks. Loetakse päripäeva 0-360. Kasutatakse
kõigil põhilistel kaasaegsetel navigatsiooniriistadel ja kaartidel;
2)
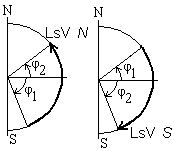
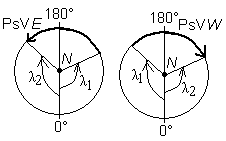
poolringsüsteem – loetakse Nordist või Süüdist ida poole või lääne poole 180 kraadini.
Kasutatakse meresõidu astronoomias;
3)
veerandringi süsteem – loetakse Nordist või Süüdist ida poole või lääne poole 90
kraadini. Kasutatakse meresõidu astronoomias;
4)
rombisüsteem – jagab horisondi 32-ks rumbiks.
1
rumb = 360 / 32 = 11,25 kraadi
Pearumbid:
N = 0
S = 180,0
E = 90,0
W = 270,0
Veerandrumbid:
NE = 45,0
SE = 135,0
SW = 225,0
NW = 315,0
Rumbisüsteemi
kaasajal kasutatakse tuule ja hoovuste suundade määramisel ja prognoosides
kusjuures tuul puhub “kompassi sisse” –
hoovus liigub “kompassist välja”.
1
Riigieksami küsimused navigatsioonis 2005
2. Pikkuste ja laiuste vahe. Igat punkti maakeral võib määrata geograafiliste koordinaatidega. See on
laiuse (fii) ja
pikkuse (lambda) kaudu.
Geograafiline laius – nurk ellipsoidi pinna
ristsirge ja ekvaatori tasandi vahel. Loetakse
ekvaatorist põhja või lõuna poole 0-90 kraadini. N on “+“ ja S on “-“
Geograafiline pikkus –
kahetahuline nurk algmeridiaani ja asukoha meridiaani tasandi
vahel. Loetakse algmeridiaanist ida või lääne poole 0 - 180 kraadini. E on “+“ ja W on “-“
Mööda Maa sferoidi pinda liikuva laeva asukoht määratakse kolme parameetriga: laius,
pikkus ja aeg.
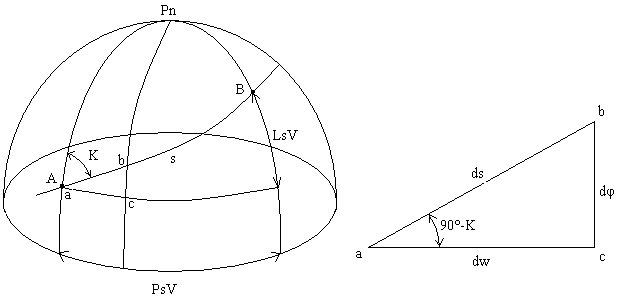
Kahe pikkuse laiuse vaheks (LsV) nimetatakse nende
punktide paralleelide vahelist meridiaani kaart.
LsV = Ls2 – Ls1 (0° - 90° N või S)
Kahe punkti pikkuste vaheks (PsV) nimetatakse
nende punktide meridiaanide vahelist lühimat
ekvaatori kaart.
PsV = Ps2 – Ps1 (0° - 180° E või W)
Laiuste vahe ja pikkuste vahe mõiste võimaldab lahendada meresõidus mitmeid ülesandeid.
Kui on teada laiuste vahe ja pikkuste vahe ning laeva algkoordinaadid, saab võlja arvutada
lõpp- punkti koordinaadid või vastupidi.
Näited:
1. Arvutada laiuste ja pikkuste
vahed ,
2. Arvutada lõpp- punkti koordinaadid,
kui:
kui:
Ls1= 35°34´ N; Ps1= 007°12´ W
Ls1= 23°47´2 S; Ps1= 165°12´7 W
Ls2= 14°45´ N; Ps2= 003°23´ E
LsV= 12°21´7 S; PsV= 101°53´3 W
Lahendus:
Ls2= 14°45´ N Ps2= 003°23´ E
Lahendus:
- Ls1= 35°34´ N - Ps1= 007°12´ W
Ls1= 23°47´2 S Ps1= 165°12´7 W
LsV=20°49´ S PsV=010°35´ E
+LsV= 12°21´7 S +PsV= 101°53´3 W
Ls2= 36°08´9 S Ps2= 267°06´0 W
2
Riigieksami küsimused navigatsioonis 2005
3. Laeva kiiruse ja läbitud vahemaa määramine. Logiõiend. Laeva poolt läbitud tee ja laeva kiiruse mõõtmiseks kasutatakse
logi . Meresõidus kasutatakse:
käsilogi, sektorlogi,
mehaaniline logi, hüdrodünaamiline logi, elektromehaaniline logi,
elektromagnetiline logi, induktsioonlogi ja dopplerlogi. Sektor-, mehaaniline- ja elektromehaaniline
logi mõõdavad laeva poolt läbitud teed, ülejäänud aga kiirust. Nagu iga teine mõõteriist, nii ka logid
näitavad kiirust või läbitud teed teatud veaga, mida nim. logiõiendiks (Δlg). See määratakse laeva poolt
kaardi järgi ja loginäitude järgi läbitud vahemaa võrdlemisel, väljendatakse protsentides
kümnendikprotsendi täpsusega:
s
LNV
lg
100
LNV,kus s on kaardi järgi läbitud vahemaa, LNV on loginäitude vahe. Logiõiend on negatiivne, kui logi
näitab rohkem tõeliselt läbitud teest ja positiivne, kui näitab vähem. Logitegur arvutatakse valemiga:
Klg = s / LNV
Logiõiendit saab määrata:
a) proovisõit mõõda mõõduliini
b) loginäitude vahe võrdlemine tõeliselt läbitud
teega , mis on kindlaks tehtud kohamääramise abil.
Mõõduliinid on proovisõitude jaoks rajatud kohad, kus on pealiitsihit ja rida ristliitsihte läbitud
vahemaa
määramiseks . Mõõduliinid rajatakse tuule ja lainetuse eest varjatud
paraja sügavusega (min.
6* laeva süvis) kohta, kus peaks puuduma ka
hoovused .
Logiõiend tuleks määrata erinevatel kiirustel erinevalt
koormatud laevale. Kindla režiimi jaoks tuleks
hoovuse puudumisel mõõduliin läbida kaks korda, võimaliku hoovuse
ellimineerimiseks läbitakse
mõõduliin kahes
erinevas suunas.
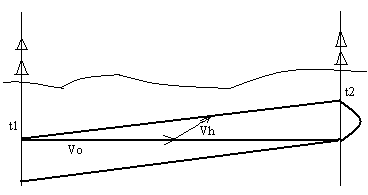
Laev sõidab kiirusega Vo, hoovuse
kiirus on Vh ja hoovuse nurk on q ja
läbib vahemaa
ajaga T (t2 – t1).
Joonisel
näidatud suunas mõõduliini
läbitud teepikkus koosneb kahest
liidetavast:
s
k LNV
T v cos
q ja
lg
1
hvastassuunas s
k LNV
T v cos
q lg
2
hPeab märkima, et logijärgi läbitud
teepikkused on erinevad, sest logi
arvestab kiirust veesuhtes (hoovust ei arvesta). Elimineerides
valemitest hoovuse, saame:
s
T
T1
2
s
T
T
kLNVT
LNV T kust leiame:
k
1
2
lg
1 2
2 1
lg
LNVT
LNV T1 2
2 1
lg
s
T
T
1
2
Arvestades, et
k 1
saame: lg
1100
lg
100
LNV T
LNV T1 2
2 1
3
Riigieksami küsimused navigatsioonis 2005
4. Tuletada Maa ellipsoidi meridiaani raadiuse valem. dxdxJooniselt saame
Md
,siit avaldades
M
sin
d sin
Loeme koordinaatide alguse Maa
keskpunktis olevaks ja kirjutame ellipsi võrrandi kanoonilisel kujul:
2
2
xy2
2
xdx2
ydydyb x1 Diferentseerides saame
0 ,ning
2
2
ab2
2
ab2
dxa ydy2
b x2
b xJooniselt
cot ,millest cot
,siit
y
tan
dx2
a y2
a2
2
2
2
xx b tan
2
2
a
bAsendame saadud y ellipsi võrrandis
1 ,arvestades, et
2
e
2
4
aa2
a 2
x
2
1
ex 2
2
tan
2
a2
2
b
a
2
1
e ,
1 ,
2
2
1 (1
e ) tan
2
2
aa2
x
ee
e
1 1
e
2
1
2
2
1 cos
1
1
2
2
1
sin
2
2
1
11
e
2
2
2
2
2
cos
cos
cos
cos
cos
2
2
a cos
2
a cos
x
x
2
2
1
e sin
2
2
1
e sin
Määramaks meridiaani raadiust M, leiame x-i tuletise järgi
asin
2
1
edx
d
1
e sin 3
2
2
2
Siit saame asenduse
eespool väljakirjutatud meridiaani võrrandisse ja saame
a sin
2
1
e
a
2
1
e
M
, mis on Maa ellipsoidi meridiaani raadiuse valem.
1
e sin 3 sin 1
e sin 3
2
2
2
2
2
2
5. Tuletada näiva horisondi kauguse arvutamise valem. 4
Riigieksami küsimused navigatsioonis 2005
Vaatleja silma läbivat loodjoont risttasandil nimetatakse tõelise horisondi tasandiks. Selline
tasapind on üksnes kujutuslik. Tegelikkuses asub vaatleja mingisugusel kõrgusel merepinnast
ning avamerel näeb vee pinda, mida ümbritseb ringjoon
AA’. Seda ringjoont nimetatakse
näivaks horisondiks.
B e
-
silma kõrgus merepinnast
e R
-
maakera raadius
C De
-
näiva horisondi kaugus
De A’ A R Kuna e on suhtes Maaga küllaldaselt väike võime
kaare De lugeda võrdseks sirge AB-ga
R Edasi avaldame kolmnurgast ABO külje AB
Phytagorase teoreemi abil.
D
ABeO D2
R2
R
e
2e D2
e2
e2 R
R2
R2eD2
e2
e2 Re 2
2
e
e2
D
R 2
e s
iin o
n s
uh
e
p
iisavaltv äike e
, t võ l
ib ugeda võrdsek n
s ulliga
e
RR
2
eKu
i
s
0
i
is 2
D 2
Re ja s
aame, e
t
D
2 Re .
Ree Arvest ade r
s efrakt s o
io nik
eskmisek v
s äärt usek 1
s
,s
09 aam
e
D 09
1
2 Re
eVäljendama
n
ks äivah
orisond k
i august m
eremiili e
d s ,t uleba
rvest ada
m
ka
aa r
aadiust m
iilides,
3
R= 437
, 75
nm ja jagade
s vaat lej s
a ilma k
õrgus 1
e 852
m e
, t võrranis
d se s
isest ada s
ee m
eet rit es
eD 09
1
2 343775
1
2
en
iisi
is
D
1
2
e e1852
e6. Tuletada kartograafilise projektsiooni moonutuse ellipsi valem. Kujutagu punkt e maakera punkti
E projektsiooni kaardil. Kujutame punkti
E ümber lõpmatult
väikese
raadiusega r0 ringi, mille sees asuvad geograafilise paralleeli lõik
PP1 ja meridiaani
lõik
MM1. Et lõigud
PP1 ja
MM1 on lõpmatult väikesed, on ka nende projektsioonid
pp1 ja
mm1 kaardil sirgjooned. Nendevaheline nurk erineb üldjuhul täisnurgast. Seepärast muutuvad
Maa pinnal asuva punkti
F ristkoordinaadid
X0 ja
Y0 projektsioonil punkti
f kaldnurkseteks
koordinaatideks
x ja
y. Tuntud koordinaatide väärtused võimaldavad määrata meridiaani ja
paralleeli kaardimõõdu, vastavalt
m ja
p, kus
p on paralleeli kaardimõõt ja
m on meridiaani
M
m
X0
F
c
t
x
f
r0
Y0
y
P
P
p
p1
E
1
e
5
s
d
m1
M1
Riigieksami küsimused navigatsioonis 2005
kaardimõõt.
xyp
m
P
unkt
E i ü
mber k
ujundatudr
ingjoon v
e õrrando
n
X2
Y2
r2XY00000x 2y 2x 2y 2T eem a
e sendused k
aardimõõ u
d võrran t
diest ,
r2 e
hk
1220pmp 2r 2m 2r 2 00Saime e
llips ivõrrandim
, illek
aaspooltlj
e ed
ppon
ja
m m 11ppm mpr1
e p ja
m r1
e m0202Seega kera pinnal kujutatud lõpmatult väikese raadiusega ring projekteerub
tasandile lõpmatult
väikese ellipsina. Lõplike mõõtmetega ellips, mis saadakse lõpmatult väikese ringi
projekteerimisel tasapinnale, kannab moonutuste ellipsi nime. On ilmne, et moonutused on
suurimad ellipsi suure pooltelje „
et“ suunas ja vähimad väikese pooltelje „
ed“ suunas.
6
Riigieksami küsimused navigatsioonis 2005
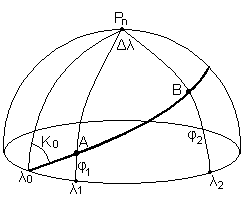
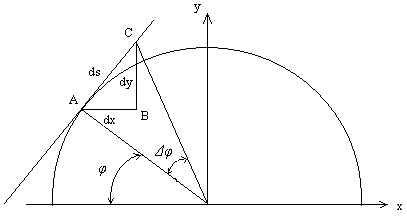
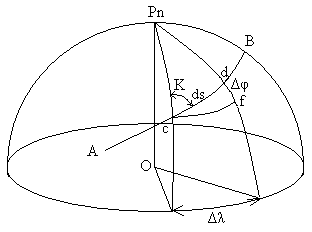
7. Tuletada loksodroomi valem.
Laev alustab sõitu punktist A kursiga K ning sõidab kurssi muutmata. Sel juhul on selle laeva
liikumise tee võrrandi tuletamiseks
vaatleme lõpmatult võikest kolmnurka cdf, mida tema väiksuse tõttu
võib lugeda tasapinnaks.
Selles kolmnurgas:
df = Δφ
cf = Δλ*cosφ
Nende kahe külje suhe on nurga 90° - K
tangens .
tan(90
K )
cos
Avaldame
valemist pikkuste vahe Δλ: tan
K cos
d
Üle minnes diferentsiaalidele saame:
d tan
K cos
0
0
d
0
d
Integreerime
avaldise d tan
K
, ning saame tan
K
cos
0
cos
Võrrandi paremal poolel on tabeli
integraal , seega võime kirjutada:
0
tan
K ln tan 45
ln tan 45
0
2
2
Sellele võrrandile vastavat kõverat Maa pinnal nimetatakse loksodroomiks.
Kui K = 0° või 180° on λ0 – λ = 0 , laeva liikumistee
ühtib meridiaaniga, mis teatavasti on suurringi
kaar.
Kui K = 90° või 270° on
tanK = ∞ , laeva liikumisteeks on paralleel ehk väike ring.
Loksodroom lõikab iga paralleeli ainult üks kord, aga meridiaani palju
kordi , lähenedes iga korraga
poolusele. Võib öelda, et loksodroom on logaritmiline spiraal, mis assümptootiliselt läheneb
poolustele .
7
Riigieksami küsimused navigatsioonis 2005
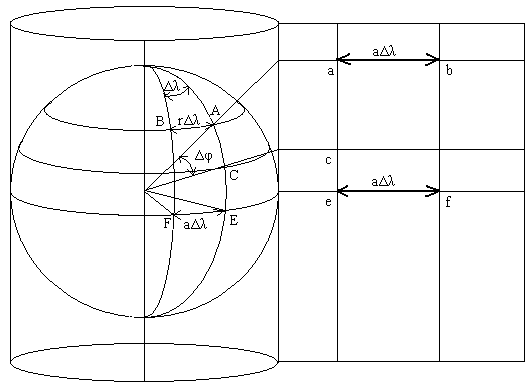
8. Tuletada Mercatori kaardi paralleeli kaardimõõdu valem. Maa pinnal asuva punkti A projektsioon silindrilisel ristprojektsioonil a. Punkti A lõpmatult väike
nihe paralleeli punkti B kutsub esile projektsioonil punkti a nihke punkti b. Seega kaardimõõt piki
paralleeli väljendub suhtega:
abp
,milles
ab
a
ja
AB
r
AB,kus
r on paralleeli raadius ja
a on ekvaatori ellipsi suure pooltelje pikkus. Tehes valemisse vastavad
aasendused, saame
p
.
ra cos
Võttes paralleeli raadiuse valemi
r
ja asendades selle, saame
1
e sin 1
2
2
2
a 1
e sin 1
1
e sin 1
2
2
2
2
2
2
p
1
e sin 1
2
2
2 sec
a cos
cos
Valemist on näha, et kõik paralleelid silindrilisel ristprojektsioonil venitatakse ekvaatori
pikkuses ehk
pikenevad
e1
2
2
2
1
sin
sec korda.
8
Riigieksami küsimused navigatsioonis 2005
9. Tuletada meridionaalosade valem. NB! Punktis 8 tuletatu jätk!!!
Vaatleme punkti
A elementaarset nihet Maa pinnal piki meridiaani punkti
C, siis
AC
M
, kus
M meridiaanellipsi raadius. Punkti
A nihkele Maa pinnal punkti
C vastab projektsioonil punkti
a nihe punkti
Dc. Tähistame
ac
D , siis kaardimõõt
m piki meridiaani avaldub suhtega
m
M
Kuna projektsioon peab olema võrdnurkne, siis
p=m. Tehes asendused, saame
dDe1
D2
2
2
1
sin
sec
e
M
. Asendame muudud diferentsiaalidega
1
2
2
2
1
sin
sec
Md
a
2
1
e
d
d dD
M
e1
2
2
2
1
sin
ja asendades
M-i, saame
dD
cos
2 2
1
e sin cos
Selleks, et leida paralleeli kaugus
D ekvaatorist, peame
integreerima diferentsiaalvõrrandi vasaku poole
rajades
D ja
0 ning parema poole rajades
φ ja
0.
D
a
2
1
e
d
a
2
1
e
d
dD
ja saame
D
2
2
1
e sin cos
2 2
1
e sin cos
0
0
0
Parempoolne integraal jaguneb kaheks
integraaliks järgmiselt:
2
2
ad
ae cos
d
D
,milles esimene integraal on tabeli integraal, teises
integraalis teeme
2
2
cos
1
e sin
0
0
asenduse
e sin sin , siis
e cos
d sin
d ja
2
2
1
e sin cos
ad
aed
Seega
D
ja seda integreerides
D
a ln tan 45
a ln tan 45
cos
cos
2
2
0
0
Selleks, et projektsioon oleks võrdne, peab paralleel projektsioonil asuma ekvaatorist kaugusel
D. Seda
kaugust nimetatakse paralleeli meridionaalosaks. Meridionaalosa on paralleeli kaugus ekvaatorist
minutites. Saab teha asendused:
e
1sin
2
1
esin
tan 45
ja sin
e sin , siis
D
a ln tan 45
2 1 sin
2 1
esin
Väljendatuna ekvaatori minutites
a=3437,7468 minutit. Kümnendlogaritmidele üleminekuks kasutame
moodulit
0,434294, siis meridionaalosade arvutamiseks saame valemi:
e 2
1
esin
D 7915, 7133ln tan 45
2 1
esin
Mõõda meridiaani mõõdetud kahe paralleeli vahelist kaugust ekvaatormiilides nimetatakse
meridionaalosade vaheks (MOV). Meridionaalosade vahe ja laiuste vahe on kaks erinevat mõistet.
9
Riigieksami küsimused navigatsioonis 2005
10. Tuletada laeva asukoha arvutamise analüütilised valemid. Oletame, et laev väljus punktist
A koordinaatidega Ls1; Ps1 , liikus kursiga
K ja läbinud tee
s, saabus
punkti
B koordinaatidega Ls2 ; Ps2 . Kui on teada lähtepunkti koordinaadid, lähte- ja sihtpunkti
koordinaatide pikkuste- ja laiuste vahed, saame leida sihtpunkti koordinaadid: Ls2=Ls1+LsV ja
Ps2=Ps1+PsV, kus LsV on arvutatav kursi ja läbitud tee järgi.
Vaatleme kolmnurka
abc, milles:
ab=
ds , so. laeva poolt läbitud tee punktist
a punkti
b miilides
ac=
dw , so. meridiaanidevaheline kaugus mööda paralleeli miilides
bc=
dφ , so. laiuste vahe miilides
Kolmnurka
abc võib lugeda tasapinnaliseks ja sealt saame järgmised diferentsiaalvõrrandid:
d
dwd
sin 90
K
; cos 90
K
; tan 90
K
dsdsdw
d
2
scos
K
d
ds cos
K
LsV
s cos
K ds1
0
dwwssin
K
dw
ds sin
K
w
s sin
K ,kus
w on kaugenemine
ds0
0
d
cot
K
dw
d tan
K dwdwEkvaatori ja paralleeli kaare vahelisest
suhtest :
d
ehk
dw
d cos
cos
d
2
2
d
Asendame:
d tan
K
d cos , siit:
d tan
K
d tan
K
cos
cos
1
2
1
tan
K ln tan
ln tan
1
2
4
2
4
2
Seega
LsV
s cos
K ja
PsV tan
K
MOV ning sihtkoha koordinaadid saab arvutada:
Ls
Ls
s cos
K 2
1
Ps
Ps
MOV tan
K 2
1
10
Riigieksami küsimused navigatsioonis 2005
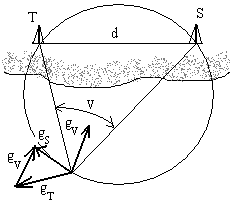
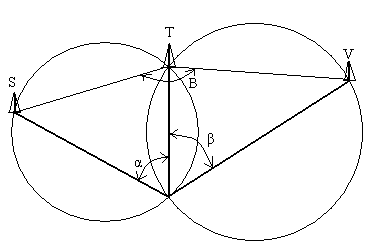
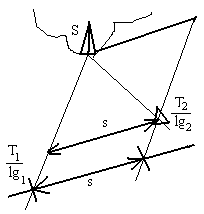
11. Tuletada rõhtnurga gradiendi valem
Rõhtnurka võib vaadelda kahe peilingu vahena ja gradiendi leiame peilingute gradientide
geomeetrilise vahena.
Vektorid gS ja gT on orientiiride S ja T peilingute gradiendid.
Nende vektorite geomeetriline vahe on vektor gV, mis ongi
otsitav rõhtnurga
gradient .
Koosiinuteoreemi järgi:
2
2
2
2
g
g
g 2
g g cos
V VSTST Asendades orientiiri peilingute gradiendid nende väärtustega:
1
1
g
ja
g
saame:
SDTDST1
1
2 cos
Vdg
, kus
d on vahemaa orientiiride
S ja
T vahel, mis mõõdetakse
V2
2
2
2
DDD DD DSTSTSTkaardilt . Rõhtnurga gradient on suunatud ringjoone keskpunkti, nurga
V suurenemise suunas.
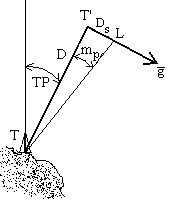
12. Tuletada kauguse ja peilingu gradiendi valemid. Peilingu gradient
Oletame, et laevalt mõõdeti orientiiri
T peiling veaga
mP. Samajoone
nihke määrame jooniselt kolmnurgast
TT’L.
D
D
m , kus
D on
SPkaugus orientiirini
mP on peilingu viga radiaanides
Et
dU
m , siis peilingu gradiendi
moodul on:
P m1
Pg
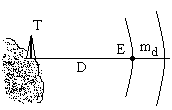
DmDp Kauguse gradient
Oletame, et
laevast mõõdeti orientiiri
T kaugus veaga
md. Kui
kauguse samajoon – ring – on kaardile
kantud , siis samajoone nihe
DS on võrdne kauguse mõõtmise veaga
md ja gradiendi moodul
g võrdub
ühega.
m Pg
1
DmPGradient on suunatud orientiirist laeva poole.
11
Riigieksami küsimused navigatsioonis 2005
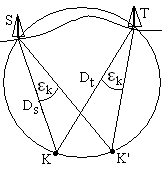
13. Laeva asukoha määramine kahe rõhtnurga järgi. Kui mõõta rõhtnurk kahe orientiiri
vahel, siis asub laev neid orientiire
laeva
asukohta läbival ringjoonel.
Kolme orientiiri vahel kahe rõhtnurga
mõõtmisel saadakse nurkade
samajoonte (ringide) lõikepunktis laeva
observeeritud asukoht.
Et kaardile märkida laeva asukoht,
võime kasutada protaktorit, mille
liikuvad
joonlauad pannakse vastavalt
mõõdetud nurkadele kindlasse
asendisse. Seejärel leitakse talle selline
asend, et joonlaudade servad läbiksid
vastavaid orientiirisid. Kasutada võib
ka kalkat, millele tõmmates kolm joont
ühest punktist ja jättes nende joonte vahele mõõdetud nurgad, asetades kalka kaardile ja nihutades seda
seni, kuni jooned läbivad mõõdetud orientiirisid ja ongi laeva asukoht käes.
Laeva asukoha määramine kahe rõhtnurga järgi on üks täpsemaid viise, kuna mõõtmisi teostatakse
sekstandiga, mille mõõdetud nurkade täpsus ulatub ühe minutini ja tema viga on väga lihtne leida.
Kasutada võib ka kompassi, mis aga ei anna nii suurt täpsust kui
sekstant . Kompassiga tuleb võtta kolm
peilingut ja seejärel tuleb leida peilingute vahed.
NB! Kahe rõhtnurga meetodi puhul esineb ka määramatuse juhtum, milleks on:
α + β +
B =
180°, kus
B on nurk orientiire ühendavate sirgete vahel.
Geomeetriliselt tähendab see seda, et mõlemad
ringjooned langevad kokku ning laev ja
orientiirid asuvad kõik ühel ja samal ringjoonel.
Kui on kahtlust, kas on tegemist määramatuse juhtumiga, tuleb leida ülalmainitud nurkade summa.
Nurga
B suurus määratakse kaardilt. On ka tunnused, millede puhul määramatuse juhtum on välistatud:
- kõik orientiirid asuvad enamvähem ühel sirgel
- orientiirid asuvad mõlemal pool laeva
- keskmine
orientiir on tunduvalt lähemal kui äärmised
Laeva asukoha täpsust hinnatakse valemiga:
1
D DD D2
2
M
s
s ,kus
STs
m ja
VTs
m 1
2
sin
1
d2
DSTVTAsendades need väärtused ja
lugedes mα = mβ, saame:
2
2
D m
D
D
TSVM
sin
dd
ST
TV
12
Riigieksami küsimused navigatsioonis 2005
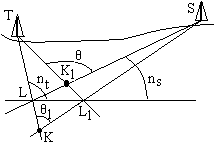
14. Laeva asukoha määramine kahe peilingu järgi.
Laeva asukoha määramiseks kahe peilingu järgi, võetakse kahe nähtavuses oleva orientiiri
peilingud ,
õiendatakse kompassiõiendiga ja kantakse kaardile. Peilingute lõikepunkt annab laeva asukoha.
Selle meetodi põhiliseks puuduseks on võimatus kontrollida saadud asukoha täpsust. Seepärast tuleb
saadud asukohta hoolikalt analüüsida.
Vähendamaks viga laeva asukoha määramisel, mis tekib see tõttu, et peilingud võetakse erinevatel
ajamomentidel, peilitakse orientiire kindlas järjekorras. Esimesena peilitakse pikitasandi lähedal olevat
orientiiri ja siis traaversi lähedal olevat orientiiri. Kontrollime sellise peilimisjärjekorra õigsust
matemaatiliselt.
Oletame, et peiliti esimesena traaversi lähedal olevat
orientiiri. Teise orientiiri peilimise hetkeks oli laev
liikunud mõõda kursijoont edasi lõigu
LL1 võrra ja asus
punktis
L1.
Peilingute lõikepunkt annab laeva asukohaks punkti
K.
Kui
aga peilida orientiire vastupidises järjekorras, saame
laeva
asukohaks punkti
K1. Vaatleme saadud
kolmnurki LKL1 ja
LK1L1.
Esimesest kolmnurgast näeme, et on võimatu
kontrollida saadud asukoha õigsust.
Asukoha nihke suurust saab määrata valemiga:
K LLLLKLLEsimesest kolmnurgast:
1 1
1
ja teisest:
1
sin
nsin
sin
nsin
St1
Et peilingud võetakse praktikas lühikese aja jooksul, võib lugeda, et
q
q .
1
sin
nSel juhul saame võrdusest:
SK L
LK ,
1 1
sin
ntet:
nn , kehtib võrratus:
K LLK .
tS1 1
Seega peilides esimesena pikitasandi lähedal asuvat orientiiri, on laeva asukoha
nihkumine peilingute
mitteüheaegse võtmise tagajärjel väiksem kui peilimisel vastupidises järjekorras.
Vaatleme kompassiõiendi vea mõju asukoha määramisel. See
viga
põhjustab laeva asukoha nihkumise mööda orientiire ja laeva
asukohta läbivat ringjoont punktist
K punkti
K1. Asukoha nihke
suurust saab määrata valemiga:
1
1
2 cos
k
LL '
2
2
sin
ggg g1
2
1
2
Asendades valemisse gradientide väärtused, saame
k2
2
LL '
D
D
D D cos
k
d ,
sin
STST
sin
kus
d on orientiiride vaheline vahemaa. Valemit analüüsides leiame, et viga suureneb järsult kui nurk
150°, sest siis väheneb nurga siinuse väärtus väga kiiresti.
Kompassiõiendis on viga, kui lühikeste ajavahemike tagant määratud asukohtade ühendamisel saame
kõvera joone ja ka kui kaht observeeritud asukohta ühendava sirge ja kaardile kantud kursijoone vahel
mpmoodustub nurk. Asukoha
ruutviga määratakse valemiga:
2
2
M
n
n 1
2
sin
13
Riigieksami küsimused navigatsioonis 2005
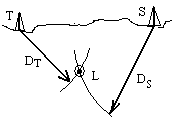
15. Laeva asukoha määramine kauguse järgi. Selleks mõõdetakse laevalt kaugus kahe või enama orientiirini. Seejärel tõmmatakse kaardile
ringjooned, millede
raadiused võrduvad mõõdetud kaugusega.
Mõõtnud kauguse
DT orientiirini
T, joonestame kaardile
ringjoone raadiusega
DT . Pärast kauguse
DS mõõtmist
orientiirini
S, saame teise ringjoone raadiusega
DS. Nende
ringide lõikepunkt annab meile laeva observeeritud asukoha
L.
Loginäit ja
kellaaeg märgitakse teise mõõtmise hetkel.
Orientiiride
valikul tuleb silmas pidada, et nendevaheline
rõhtnurk oleks 30° ja 150° vahel. Esimesena mõõdetakse kaugus,
mis
asub traaversi lähedal, sest see muutub kõige kiiremini.
Laeva asukoha määramisel ühe orientiiri kahekordsel peilimisel.
Selle meetodi olemus põhineb asujoonte edasikandmisel.
Antud kursil liikuvalt laevalt võetakse ajahetkel
T1 orientiiri
S peiling ja kantakse kaardile. Peilimise hetkel
märgitakse kellaaeg ja loginäit. Hetkel
T2 võetakse teine
peiling ja kantakse kaardile. Et hetkel
T1 asus laev esimese
peilingu
joonel , hetkel
T2 aga teisel, siis nihutades rööpselt
esimest peilingut ajahetke
T1 ja
T2 vahel läbitud tee võrra,
annab
peilingute lõikepunkt laeva asukoha hetkel
T2.
14
Riigieksami küsimused navigatsioonis 2005
16. Satelliitnavigatsioonisüsteem NAVSAT 15
Riigieksami küsimused navigatsioonis 2005
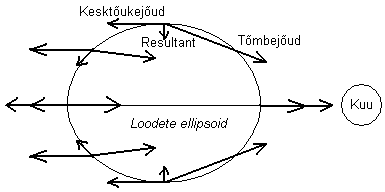
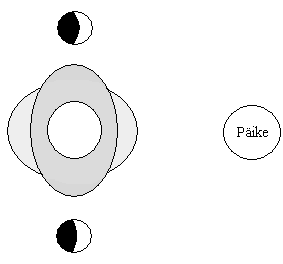
17. Loodete teooria. Loodete ebavõrdsused. Süsüügia ja kvadatuur. Loode – merepinna perioodiline kõikumine, mida põhjustavad Kuu ja Päikese külgetõmbejõud ning
Maa ja Kuu ühise
keskme ümber pöörlemisel tekkiv tsentrifugaaljõud. Loodete lihtsustatud teooria
saame tuletada eeldustel:
Maa ei pöörle oma
telje ümber
Maa on
homogeenne kera, mis on üleni
veega kaetud
Kuu kääne on null
Vaadeldakse ainult süsteemi Kuu – Maa Süsteem Maa – Kuu
pöörleb ümber ühise
keskme, mis asub 4070 km kaugusel Maa keskmest. Sellise liikumise tagajärjeks on tsentrifugaaljõud,
mis mõjub maakera igale punktile. Selle jõu siht on paralleelne Maa ja Kuu keskmeid ühendava
sirgega ja on suunatud väljapoole. Seega mõjuvad maakera igale punktile kaks jõudu: tsentrifugaaljõud ja Kuu
külgetõmbejõud. Nende jõudude tulemusel võtab maailmamere pind ellipsoidi kuju, mille suur telg on
suunatud Kuu keskme poole ja mida nim.
loodete ellipsoidiks. Ellipsoidi väike telg
jaotab Maa kaheks: Kuu poolt valgustatud ja Kuu poolt valgustamata pooleks.
Kõrge vesi esineb meridiaanil, mis läbib ellipsoidi suurt telge. Madal vesi on punktides, mis asuvad
valgusringil.
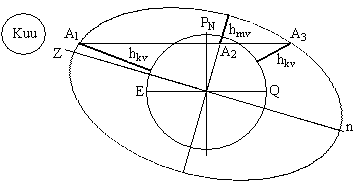
Vaatleme loodete ellpsoidi,
kui Kuu
ei ole võrdne nulliga (ei ole
ekvaatoril ).
Oletame, et Kuu kalle on
punkti
Ns . Loodete ellpsoidi suurpooltelg on endiselt suunatud Kuu keskmesse. Olgu punktis
A1 vaadeldaval hetkel kõrgvesi. Maa pöörlemise tõttu osutub
A1 mõne aja pärast olevaks asendis
A2, kus on
madalvesi . Teine kõrgvesi esineb punktis
A3, kuid selles
on kõrgvee suurus väiksem
kui
punktis
A1, sest loodete
ellipsoidi telg on nihutatud
Maa
telje ja ekvaatori suhtes, seda
nimetatakse
ööpäevaseks
ebavõrdsuseks, mis tingivad
mitmete
terminite sissetoomist: kõrge
kõrgvesi, madal kõrgvesi,
kõrge
madalvesi, madal madalvesi.
Poole ööpäeva jooksul läbib punkt
A ellipsi kaare
A1 A2 A3. Kaar
A1 A2 pikem kui
A2 A3. Seega on
ajavahemik kõrge kõrgvee ja madala madalavee vahel suurem, kui ajavahemik madala kõrgvee ja
madala madalavee vahel. Suurimaid ebavõrdsusi täheldatakse Kuu suurima kalde puhul, kui Kuu kalle
on null, siis ebavõrdsusi ei esine.
16
Riigieksami küsimused navigatsioonis 2005
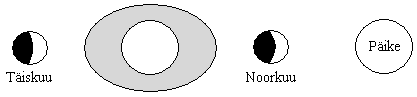
2) Süsüügia ja kvadratuur ( spring & neap).
Süsteemi Maa – Kuu pöörlemise ning Maa liikumise tulemusena ümber Päikese, muutub
pidevalt Maa, Kuu ja Päikese vastastikune asend. Kui Maa, Kuu ja Päike asuvad umbes samal
joonel, siis loodeid tekitavad jõud liituvad. Sel ajal täheldatakse kõige
suuremaid merepinna
kõikumisi. Niisuguseid loodeid nimetatakse
süsüügia loodeks. Süsüügia
looded esinevad kaks
korda sünoosilise kuu jooksul –
noorkuu ja täiskuu ajal.
Kui Kuu ja Päike asetsevad risttasanditel, vähendab Päike Kuu loodeid tekitavaid jõude. Sel
ajal täheldatakse kõige väiksemaid merepinna kõikumisi. Selliseid loodeid nimetatakse
kvadratuurideks. Ka kvadratuursed looded on kaks korda sünoodilise kuu jooksul –
Kuu
esimese ja kolmanda veerandi ajal. Tõusu kõrguse muutus süsüügiast kvadratuurini kannab
faasi ebavõrdsuse nimetust . 17
Riigieksami küsimused navigatsioonis 2005
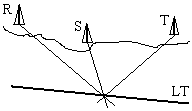
18. Laeva asukoha määramine kolme peilingu järgi ja kompassiõiendi täpsustamine. Kolme peilingu järgi laeva asukoha määramiseks võetakse üksteise järel võimalikult kiirest kolme
orientiiri peilingud, õiendatakse kompassiõiendiga ja kantakse kaardile. Peilingute lõikepunkt annab
laeva asukoha. Reeglina aga ei lõiku kõik kolm peilingut ühes punktis vaid moodustavad kolmnurga,
sel juhul on observeeritud asukoht kolmnurga keskel. Et neid vigu vältida, peilitakse
kõigepealt orientiire, mis asuvad laeva diametraaltasandi lähedal ja siis alles orientiir laeva traaversis, sest see
peiling muutub kõige kiiremini. Suure kiirusega laevadel tuleb peilida laeva diametraaltasandi lähedal
asuvaid orientiire kaks korda ja arvutatakse nende keskmine.
Oletame, et nähtaval on kolm orientiiri
R, S, T millest
R ja
T asuvad laeva diametraaltasandi lähedal. Orientiire peilitakse
järjekorras
R(P1), T(P2), S(P3), T(P4), R(P5) ning
arvutatakse
R ja
T keskmised peilingu:
P
PP
P1
5
P
ja
2
4
P
R2
T2
Aeg ja loginäit märgitakse orientiiri
S peilimise hetkel.
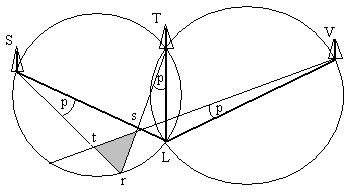
Vaatleme, kuidas kompassiõiendi süstemaatiline viga mõjutab laeva observeeritud asukohta.
Oletame, et laeva tegelik asukoht on punktis
L. Kujutame rõhtnurkadele
α=P–1+P2 ja
β=P2 P3 vastavad samajooned. Kui muuta mingi suuruse
p võrra üht peilingutest,
pöörduvad ka teised peilingud
sama nurga võrra samas suunas ja saame kujundi
str, mida nimetatakse veakolmnurgaks, mille tipp
s asub orientiiride
T ja
V läbival ringjoonel, tipp
t orientiire
S ja
V läbival ringjoonel ning tipp
r orientiire
T ja
S läbival ringjoonel. Kui kompassiõiendi vea suurus jätta muutumatuks, muuta aga vea
märki, nihkuvad veakolmnurga
tipud mööda vastavaid ringjooni uutesse punktidesse. Seega
kompassiõiendi süstemaatilise vea korral ei asu laeva tegelik asukoht veakolmnurga sees. Kui
peilingute kaardile panekul tekib veakolmnurk, mille külje pikkus ületab 5 kbt, on otstarbekas leida
peilingute
lahutamise teel orientiiridevahelised rõhtnurgad ja kanda laeva asukoht kaardile kalka või
protaktori abil. Ühendades saadud asukoht ükskõik millise orientiiriga, saab määrata kompassiõiendi
õige väärtuse.
18
Riigieksami küsimused navigatsioonis 2005
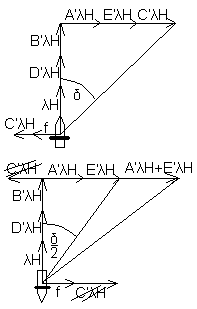
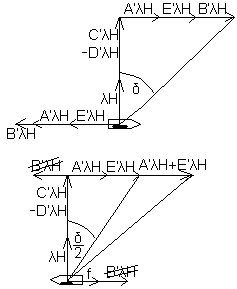
19. Anda teoreetiline põhjendus jõu C’λH hävitamiseks.
20. Anda teoreetiline põhjendus jõu B’λH hävitamiseks. Kui deviatsiooni tekitavad jõud on suured, võib juhtuda , et teatavatel kurssidel nende summa
neutraliseerib kasuliku jõu λH ja kompass lakkab töötamast. Praktikas nimetatakse deviatsiooni
vähendamist deviatsiooni hävitamiseks. Deviatsiooni hävitamiseks kompassikodariku lähedale
asetatakse püsi- või pehmeraua magnet. Magnetide
kasutamisel lähtutakse reeglist- kõvaraua poolt
tekitatud jõudude kompenseerimiseks kasutatakse püsimagneteid, pehme raua poolt tekitatud jõudude
kompenseerimiseks kasutatakse pehmeraua pulkade või keerede abil. Kompenseeriva jõu suurus ja
suund sõltuvad kompensatsioonimagneti kaugusest ja asendist kompassikodariku suhtes. Deviatsiooni
hävitamisest rääkides peetakse silmas eelkõige poolringideviatsiooni kompenseerimist.
Teatavasti koosneb poolringi deviatsiooni esile
kutsuvad jõud B’λH= cZ+P ja C’λH= fZ + Q kõva ja
pehme laevaraua magneetimist. Põhimõtteliselt tuleks neid jõude kompenseerida kombineeritult kõva ja
pehme rauaga. Kuid pehmeraua jõud cZ ja fZ on reeglina väiksed ja seepärast kasutatakse poolringi
deviatsiooni hävitamiseks ainult püsimagneteid.
Poolringi deviatsiooni hävitamine Ayri meetodil.
Smith’i valem: tanδ= (A’+B’
sinK + C’cosK +
D’sin2K + E’cos2K)/(1 + B’cosK- C’sinK +
D’cos2K- E’sin2K), K=MK
Kirjutame Smith’i valem 0° jaoks:
Tanδ = (A’+C’+E’)/(1+B’+D’). korrutame mõlemad
pooled λH.
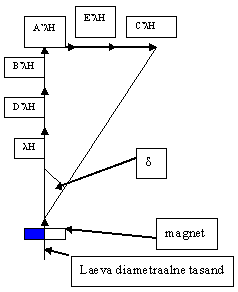
Jõu C’λH kompenseerimiseks asetame
kompassijalga
laevaga risti asuva püsimagneti
niimodi :
A’ λH + C’ λH + E’ λH = F, A’ λH + E’ λH = f1 ja
C’ λH
= f2 ehk F= f1+f2
Jõud f2 kompenseerib jõu C’λH igal kursil, sest
ükskõik millisel kursil ka laev asub, need kaks jõudu
on
alati vastassuunalised.
Pöörame laeva magnetkursile S ja kirjutame
Smith’i valemi selle kursi jaoks:
Tanδ = (A’λH-C’λH+E’λH + f1+f2)/(λH-B’λH+D’λH)
Sellel kursil peavad deviatsiooni tekitama jõud A’λH+E’λH, tegelikult aga tekitab deviatsiooni kaks
korda suurem jõud. Seega jõudude A’λH+E’λH taastamiseks tuleb kaotada jõud f1. See saadakse
kompensatsioonimagneti nihutamisega asendisse, kus
deviatsioon on poole võrra väiksem esialgsest.
Teine poolringideviatsiooni tekitav jõud B’λH hävitatakse magnetkurssidel E ja W. Selleks kasutame
kompensatsioonimagneti pikitasandis.
Tuleb meeles pidada, et deviatsiooni hävitamine Airy meetodil toimub magnetkurssidel.
19
Riigieksami küsimused navigatsioonis 2005
Jõu C’λH hävitamine
Jõu B’λH hävitamine
20
Riigieksami küsimused navigatsioonis 2005
21. Selgitada deviatsiooni muutumist magnetlaiuse muutumisel ja kompensaatori kasutamist. Deviatsioon muutub magnetlaiuse
muutudes , kuna muutub poolringiline deviatsioon, mida tekitavad
jõud
B’λH=cZ+P ja
C’λH=fZ+Q (B’λH ja
C’λH- laeva magnetjõud, mida põhjustavad laeva kõvaraud,
Z- Maa magnetvälja püstkomponent,
c ja f – Poissoni
parameetrid ). Jõud B’λH ja C’λH koosnevad
jõududest P ja Q, mida tekitavad laeva kõvaraud ja magnetiseeruvast jõust Z. Järelikult magnetlaiuse
muutumisega muutuvad ka cZ ja fZ jõu Z muutuse tõttu ning muutub ka poolringiline deviatsioon.
Selleks, et poolringiline deviatsioon oleks kompenseeritud kõikidel
laiustel , on vajalik jõud P ja Q
kompenseerida magnetitega ja cZ ning fZ
pehmete vertikaalraudadega, mida nimetatakse
Flinders paarideks.. Peakompassidel, mis asetuvad laeva diametraaltasandis,
parameeter f=0. Kuna selliste
kompasside suhtes laeva vertikaalrauad asetsevad sümmeetriliselt ja seetõttu jõu fZ kompenseerimist pole
vaja, jõud C’λH=0, mis kompenseeritakse põiki magnetitega kõikide magnetlaiuste jaoks. Seega Flinders
paar asetatakse ainult jõu cZ kompenseerimiseks. Enamikel laevadel on jõud cZ negatiivne ja selle jõu
kompenseerimiseks kinnitatakse kompassi ette vertikaalselt pehmeraud, mis annab positiivse cZ’i.
Flinders paari valik toimub praktiliselt
kaldal ., sest see magnetiseerub jõust Z ja kuna laeva pikijõud
tekitavad maksimaalse deviatsiooni W ja E kurssidel, siis pööratakse kompass ühes selle paariga nendele
kurssidele. Flinders paar valitakse järkjärguliste raudade katsetustega, kuni
saavutatakse W või E kursil
arvutatud kõrvalekaldumine. Flinders paarid kujutavad endast 7,5 cm läbimõõduga toru, mille seina
paksus on u. 2,5 mm ja pikkus on kuni 60 cm.
Et jõud B’λH ja C’λH jääksid kompenseerituks ka magnetlaiuste muutumisel, peab neid
kompenseerima erinevate magnetitega. Laeva püsimagnetvälja jõud P ja Q tuleb kompenseerida põiki ja
piki püsimagnetitega ning jõud fZ ja cZ püstiste pehmeraua magnetitega.
Kõva laevaraua ja kompenseerimismagnetite jõud laeva asukoha muutumisel ei muutu, pehme
laevaraua ja kompensaatorite pehme raua aga magneedib ühe ja sama väärtusega Maa magnetvälja
püstkomponent.
Pehme laevaraua jõu kompenseerimiseks kasutatavat püstkompensaatorit nimetatakse flindersbariks.
21
Riigieksami küsimused navigatsioonis 2005
22. Veerandringideviatsiooni hävitamine.
Veerandringedeviatsiooni tekitavad jõud
D’λH ja
E’λH, mille tekitab pehme laevaraua
magnetväli .
Need jõud tähistatakse:
a-e
d+b
D'H=
H ja E'H=
H 2
2
Nendest väärtustest leiame deviatsiooni täpsed väärtused:
a
ed
bD '
ja
E '
2
2
Deviatsioonitegur D’ on laevades positiivne. Parameetri
a tekitavad kompassi suhtes sümmeetriliselt
piki laeva asuvad
talad – stringerid, nende poolt tekitatav parameeter on negatiivne. Parameetri
e tekitavad sümmeetriliselt põiki laeva asetsevad talad – piimid, ka nende poolt tekitatud parameeter on
negatiivne. Absoluutväärtuselt on parameeter
e suurem kui
a, sest piimide
otsad asuvad asuvad
kompassile lähemal kui stringerite.
Asetades parameetrite väärtused D’ valemisse arvestades, et
|a|











































Kõik kommentaarid