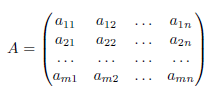
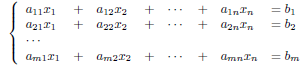
1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega: Maatriksi järk tähistab maatriksi mõõtmeid: A on m*n järku maatriks. Liigid: · Ruutmaatriks (m=n) · Diagonaalmaatriks ruutmaatriks, mille peadiagonaalis arvud, muud elemendid 0-d. · Ühikmaatriks diagonaalmaatriksi erijuht. Peadiagonaali elemendid 1-d. Täh E. · Nullmaatriks kõik nullid. Täh . 2. Tehted maatriksitega (korrutamine arvuga, liitmine, lahutamine, korrutamine). · Korrutamine arvuga: korrutades maatriksit reaalarvuga, muutuvad kõik elemendid, selle arvu korra suuremaks. · Maatriksite liitmine: mõõtmed peavad olema samad. Ühemaatriksi elemendid liidetakse teise maatriksi vastavate elementidega: A = (a ij) ja B = (bij) A+B =(cij) kus cij = aij + bij. ·
Kõrgem matemaatika 1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks ristkülikukujuline arvudega tabel, milles on m-rida ja n-veergu. Tähistused: (maatriksit tähistatakse suure tähega) a11 a12 ... a1n a 21 a 22 ... a2n i =1,2,..., m = A( aij ), ... ... ... ... j =1,2,..., n a m1 am2 ... a mn Maatriksi järk tähistab maatriksi môôtmeid; A on m*n järku maatriks.
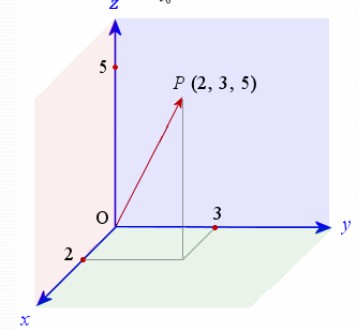
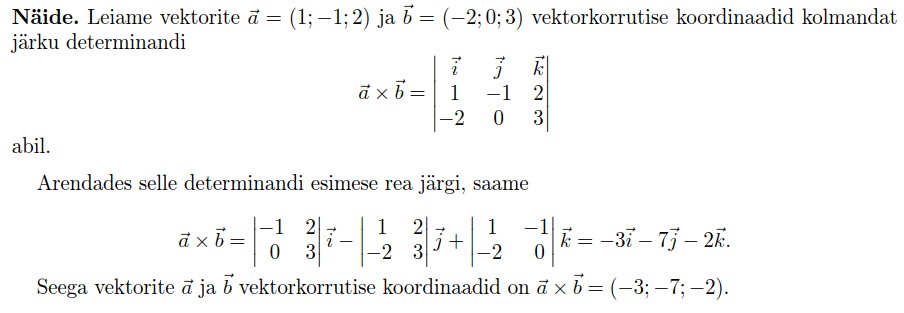
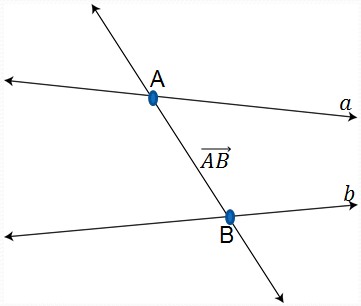
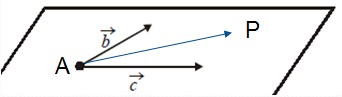
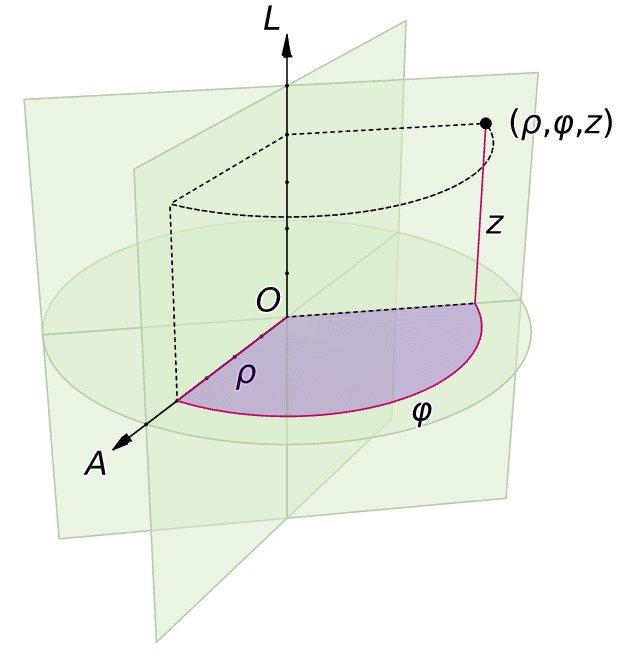
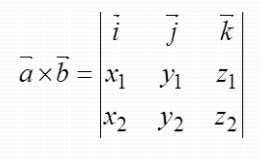
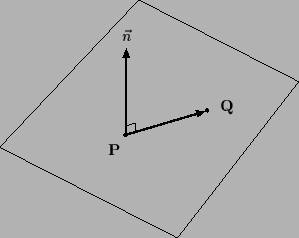
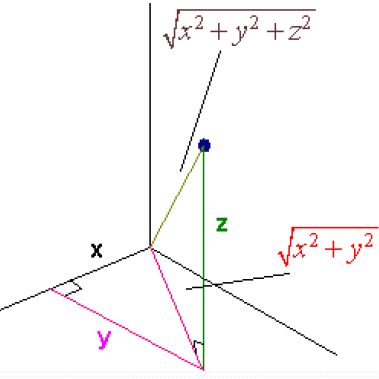
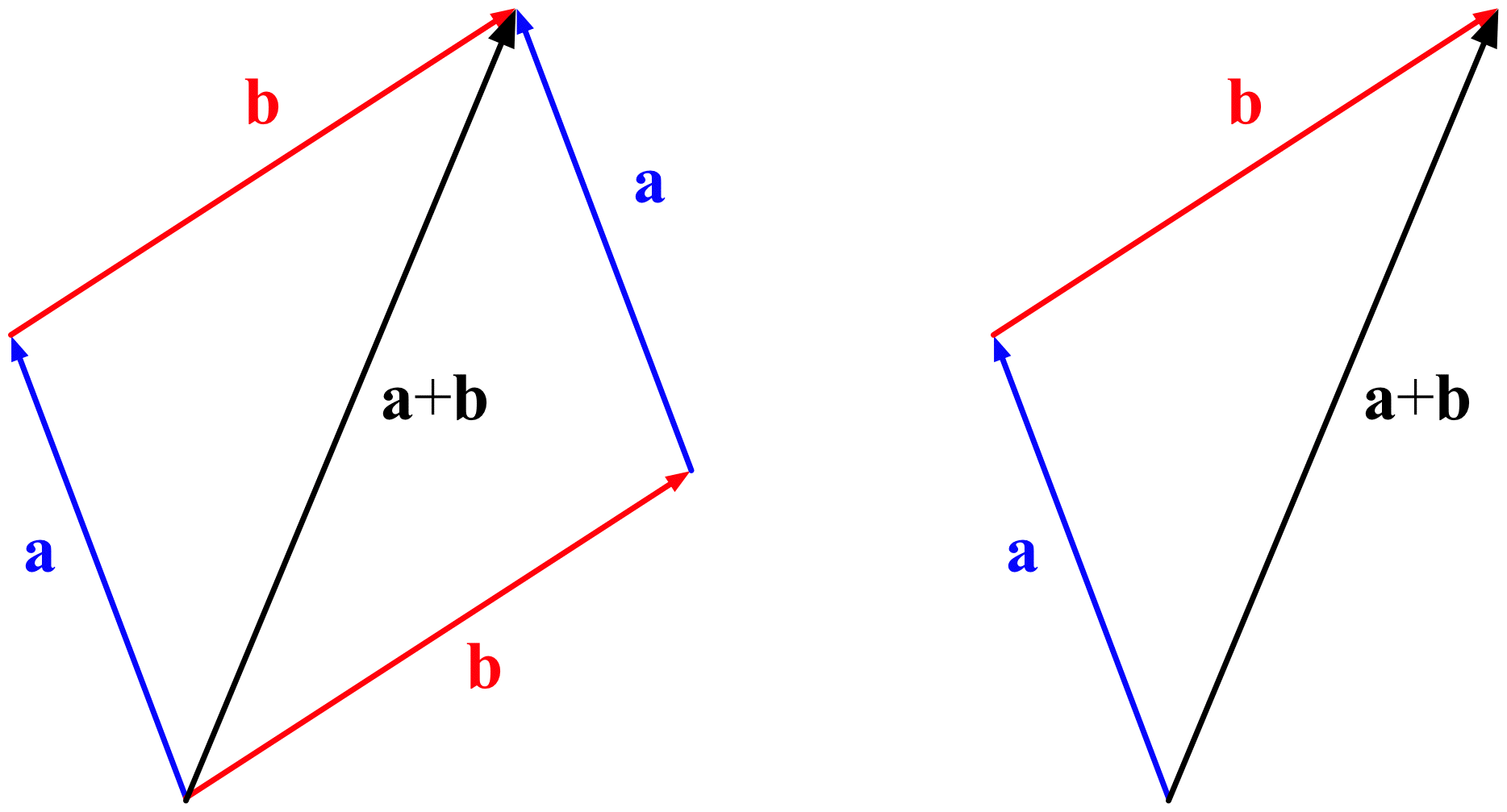
Eksami kordamisküsimused Lineaaralgebra ja analüütiline geomeetria (2015- 2016 aasta sügis) Ristkoordinaadid. Kui ruumis on antud ristkoordinaadisüsteem, siis ruumi iga punkt P on üheselt määrastud ristkoordinaatidega x, y, z, kus x on punkti P ristprojektsioon abstsissteljele, y on punkti P ristprojektsioon ordinaatteljele ja z on punkti P ristprojektsioon aplikaateljele. Kirjutame P(x, y, z). Kahe punkti vaheline kaugus. Kui P1(x1, y1, z1), P2(x2, y2, z2) on ruumi punktid, siis kaugus d punktide P1 ja P2 vahel on määratud valemiga Vektori mõiste Vektor on suunatud lõik alguspunktiga punktis A ja lõpp-punktiga punktis B. Nullvektor Eukleidilises ruumis (näiteks tasandil) on nullvektoriks määramata suunaga vektor, mille pikkus on null. Ühikvektor Kui vektori pikkus on 1, siis teda nimetatakse ühikvektoriks. Vektorite liitmine ja lahutamine Lahutamine toimub sama põhimõtte järgi. Reaalarvu ja vektori korrutis. Vektori pikkus Vektori pikkuseks lo
1. peatükk 1) Definitsioon 1.1: maatriks Ümarsulgude vahele paigutatud m reast ja n veerust koosnev ristkülikukujuline arvude tabel. 2) Definitsioon 1.2: ruutmaatriks, reamaatriks/reavektor, veerumaatriks/veeruvektor Ruutmaatriks - ridasid ja veerge sama palju Reamaatriks - koosneb ühest reast Reavektor - sama, mis reamaatriks Veerumaatriks - koosneb ühest veerust Veeruvektor - sama, mis veerumaatriks 3) Definitsioon 1.3: maatriksite võrdsus Maatriksid on võrdsed, kui nende ridade ja veergude arv on võrdne ning vastavatel kohtadel elemendid on võrdsed. 4) Definitsioon 1.4: maatriksite summa Maatriksite summa on maatriks C, mille elementideks on vastavate elementide summad. 5) Definitsioon 1.5: maatriksite vahe Maatriksite vahe on maatriks C, mille elementideks on vastavate elementide vahed. Järjekord on oluline. 6) Definitsioon 1.6: maatriksi korrutamine skalaariga Maatriksi A korrutist skalaariga λ nim. maatriksit λA = B, mille elemendid saadakse maatriksi A kõigi el
1. peatükk 1) Definitsioon 1.1: maatriks Ümarsulgude vahele paigutatud m reast ja n veerust koosnev ristkülikukujuline arvude tabel. 2) Definitsioon 1.2: ruutmaatriks, reamaatriks/reavektor, veerumaatriks/veeruvektor Ruutmaatriks - ridasid ja veerge sama palju Reamaatriks - koosneb ühest reast Reavektor - sama, mis reamaatriks Veerumaatriks - koosneb ühest veerust Veeruvektor - sama, mis veerumaatriks 3) Definitsioon 1.3: maatriksite võrdsus Maatriksid on võrdsed, kui nende ridade ja veergude arv on võrdne ning vastavatel kohtadel elemendid on võrdsed. 4) Definitsioon 1.4: maatriksite summa Maatriksite summa on maatriks C, mille elementideks on vastavate elementide summad. 5) Definitsioon 1.5: maatriksite vahe Maatriksite vahe on maatriks C, mille elementideks on vastavate elementide vahed. Järjekord on oluline. 6) Definitsioon 1.6: maatriksi korrutamine skalaariga Maatriksi A korrutist skalaariga λ nim. maatriksit λA = B, mille elemendid saadakse maatriksi A kõigi el
MTMM.00.340 Kõrgem matemaatika 1 2016 KÄRBITUD loengukonspekt Marek Kolk ii Sisukord 0 Tähistused. Reaalarvud 1 0.1 Tähistused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 0.2 Kreeka tähestik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 0.3 Reaalarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 0.4 Summa sümbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1 Maatriksid ja determinandid 7 1.1 Maatriksi mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.2 Tehted maatriksitega . . . . . . . . . . . . . . . . . . .
1. Ristkoordinaadid- kui ruumis on antud ristkordinaadisüsteem, siis ruumi iga punkt P on üheselt määratud ristkordinaatidega x,y,z, kus x on punkti P ristprojektsioon absissteljele, y on punkti P ristprojektsioon ordinaattelele ja z on punkti P ristprojektsioon aplikaattelele P(x,y,z) 2. Kahe punkti vaheline kaugus- Kui P1(x1,y1,z1), P2(x2,y2,z2) on ruumi punktid siis kaugus d punktide P1 ja P2 vahel on määratud valemiga √ 2 2 d= ( x 2−x 1 ) + ( y 2− y 1 ) + ( z 2 + z 1) 2 3. Vektori mõiste-Vektor on suunatud lõik millel on kindel algus- ja lõpp-punkt. 4. Nullvektor-Vektorit, mille pikkus on null, nimetatakse nullvektoriks ja tähistatakse sümboliga . Nullvektori suund on määramata. 5. Ühikvektor- Kui vektori pikkus on 1 6. vektorite liitmine-rööpkülikureegel: Vektorite a ja b summaks nimetatakse niisugust vektorit c, mis väljub nend
Kõrgem matemaatika 1 kordamisküsimused 2017/2018 1. Maatriksi definitsioon. Maatriksi elemendid. Maatriksi järk. Ruutmaatriks. Lineaarsed tehted maatriksitega (liitmine ja skalaariga korrutamine). Nullmaatriks. Vastandmaatriks. Lineaarsete tehete omadused. Transponeeritud maatriks. Maatriks on arvude, funktsioonide või muude elementide korraldatud kogum × . Maatriksil on m rida ja n veergu, kus a11; a12; ...a1n; jne on maatriksi elemendid. Kui me räägime järkudest, siis esimest järku matriks on a, teist on a, a, a, a, kui räägime kolmandat järku siis a,a,a,a,a,a,a,a,a (9) Ruutmaatriksi ridade ja veergude arv on sama. Kui me räägime skalaariga korrutamisest, see tähendab lihtslat arv korrutame matriksiga Maatriksit, milles kõik elemendid on nullid, nimetatakse nullmaatriksiks ja tähistatakse . Maatriksi vastandmaatriksiks nimeta





















































































Kõik kommentaarid