KM SUULINE
1. peatükk
1) Definitsioon 1.1: maatriks
Ümarsulgude vahele paigutatud m reast ja n veerust koosnev ristkülikukujuline arvude tabel.
2) Definitsioon 1.2: ruutmaatriks, reamaatriks/reavektor, veerumaatriks/veeruvektor
Ruutmaatriks - ridasid ja veerge sama palju
Reamaatriks - koosneb ühest reast
Reavektor - sama, mis reamaatriks
Veerumaatriks - koosneb ühest veerust
Veeruvektor - sama, mis veerumaatriks
3) Definitsioon 1.3: maatriksite võrdsus
Maatriksid on võrdsed, kui nende ridade ja veergude arv on võrdne ning vastavatel kohtadel
elemendid on võrdsed.
4) Definitsioon 1.4: maatriksite summa
Maatriksite summa on maatriks C, mille elementideks on vastavate elementide summad.
5) Definitsioon 1.5: maatriksite vahe
Maatriksite vahe on maatriks C, mille elementideks on vastavate elementide vahed. Järjekord
on oluline.
6) Definitsioon 1.6: maatriksi korrutamine skalaariga
Maatriksi A korrutist skalaariga λ nim. maatriksit λA = B, mille elemendid saadakse
maatriksi A kõigi elementide korrutamisel arvuga λ.
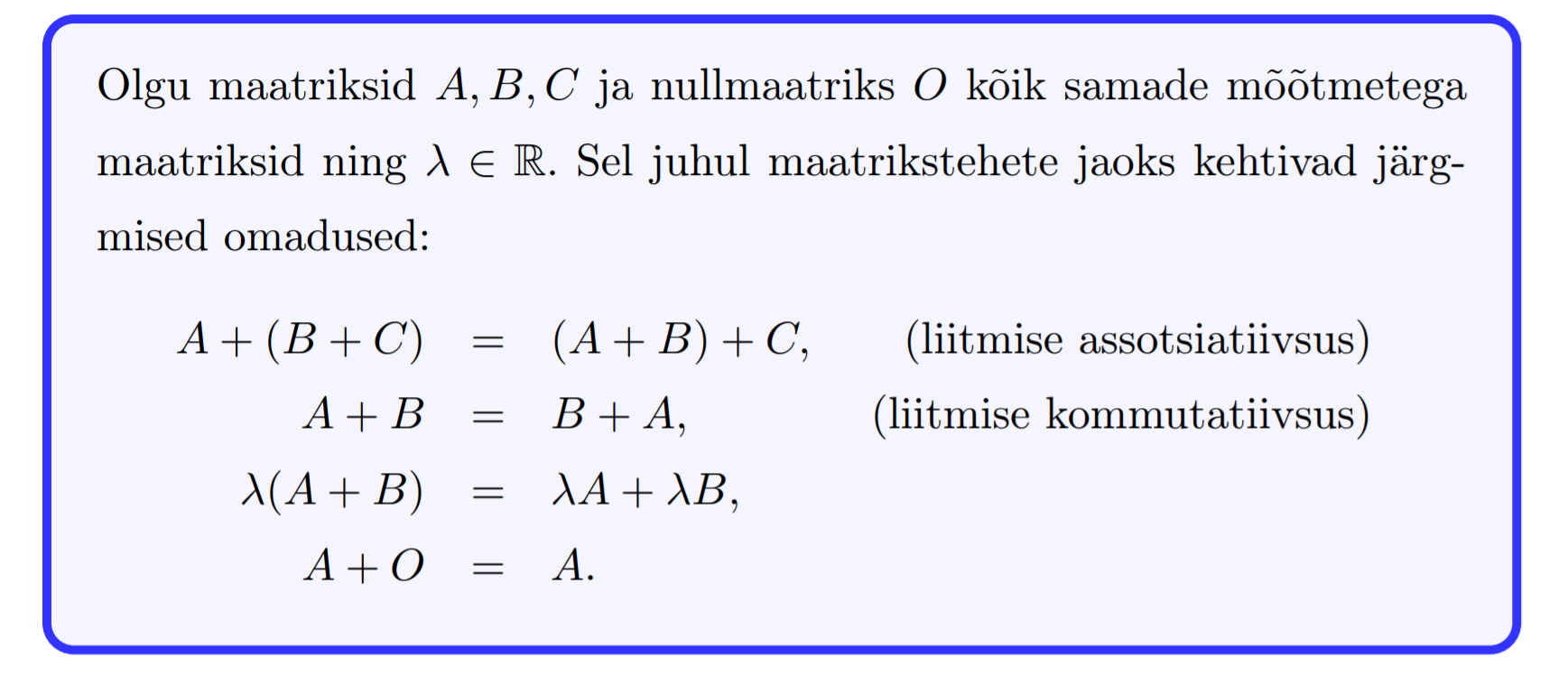
7) Maatriksi tehetega seotud omadused
8) Definitsioon 1.7: nullmaatriks
Nullmaatriks on maatriks, mille kõik elemendid võrduvad nulliga.
9) Definitsioon 1.8: transponeeritud maatriks
Transponeeritud maatriks on maatriks, mis saadakse originaalmaatriksi ridade ja veergude
äravahetamisel.
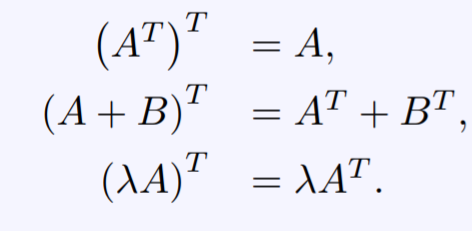
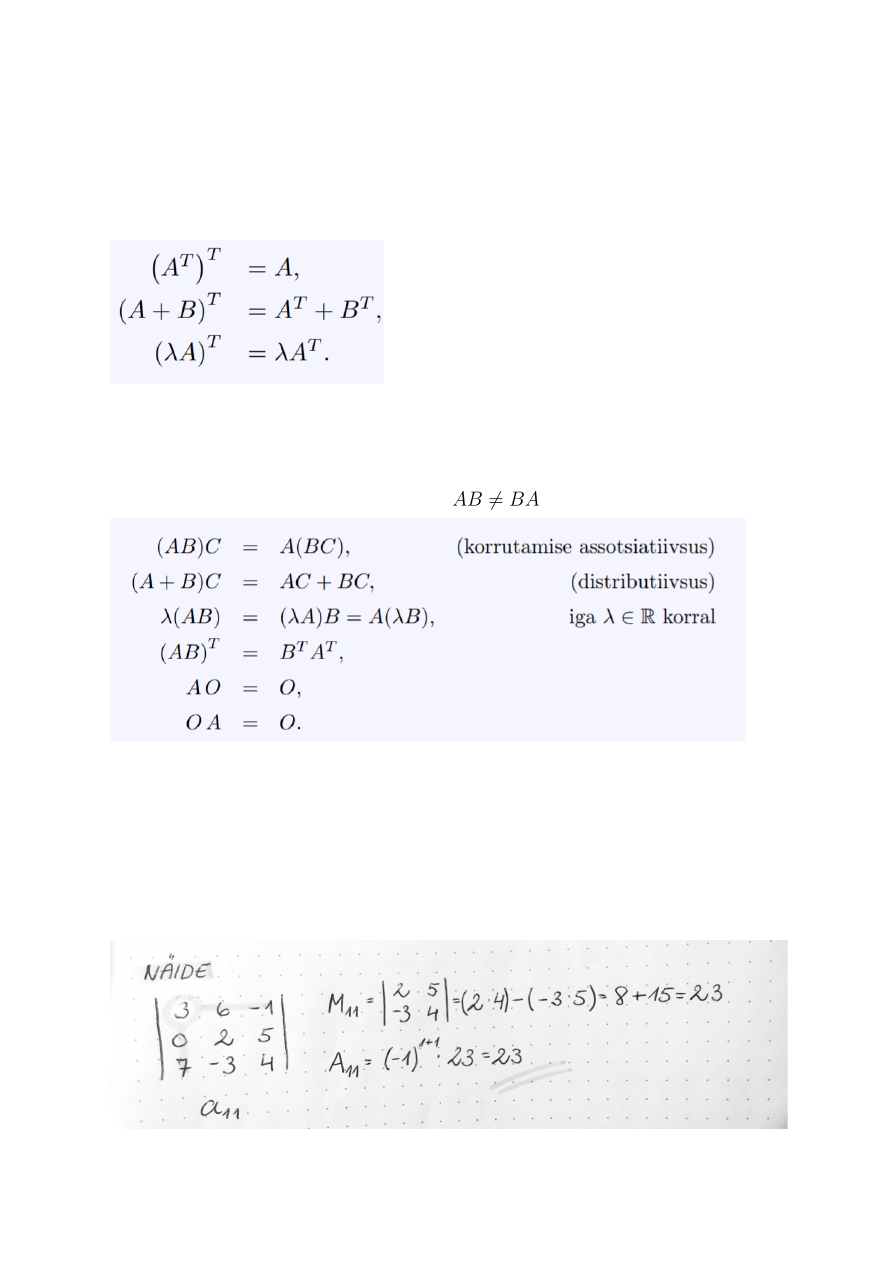
10) Transponeeritud maatriksi omadused
11) polegi
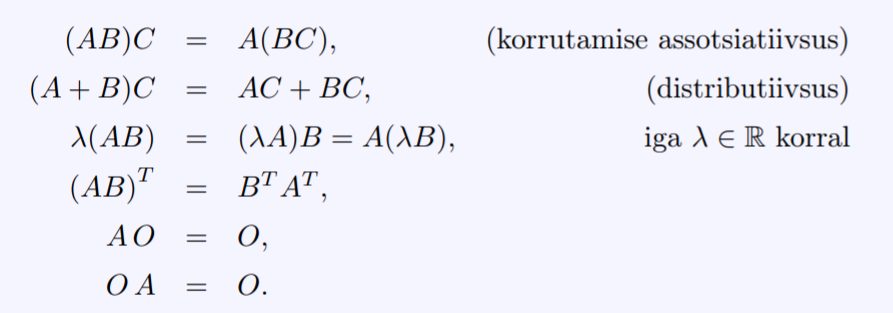
12) Maatriksite korrutamise omadused
● Korrutamine ei ole kommutatiivne, ehk
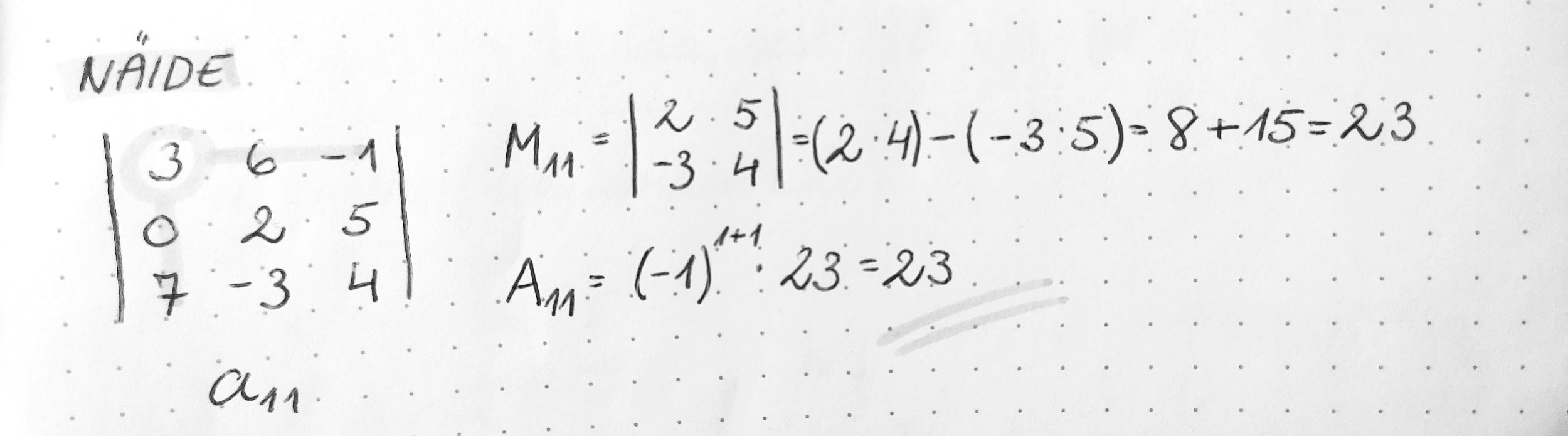
13) Definitsioon 1.12: maatriksi elemendile vastav miinor
Ruutmaatriksi A elemendile aij vastavaks miinoriks nimetatakse determinanti Mij , mis
saadakse, kui maatriksi A determinandis jätta välja elementi aij läbiv rida ja veerg.
15) Definitsioon 1.14: elemendile vastav alamdeterminant
Alamdeterminant on miinor, kuid vastava märgiga. Märk sõltub elemendi asukohast
(peadiagonaal on +, järgnevad - ja nii pendeldab)
16) Omadused 1.1-1.8: determinantide põhiomadused
1. Maatriksi transponeerimine (ridade ja veergude vahetamine) ei muuda maatriksi
determinandi väärtust.
2. Kahe rea (või veeru) vahetamisel muutub determinandi märk vastupidiseks.
3. Kahe võrdse või võrdelise rea (või veeru) korral on determinandi väärtus null.
4. Kui determinandi mingi rea (või veeru) kõik elemendid on nullid, siis determinandi
väärtus võrdub nulliga.
5. Mingi rea (või veeru) kõigi elementide korrutamisel arvuga k, korrutub determinandi
väärtus arvuga.
6. Kui determinandi mingis reas (või veerus) olevad elemendid kujutavad endast kahe
liidetava summasid, siis see determinant võrdub kahe sama järku determinandi
summaga, millest esimeses on vastavas reas (või veerus) esimesed liidetavad, teises
teised liidetavad, kõik ülejaanud read (veerud) on aga samasugused nagu
lähtedeterminadis.
7. Determinandi väärtus ei muutu, kui mingile reale (või veerule) liita mistahes arvuga
korrutatud teine rida (või veerg).
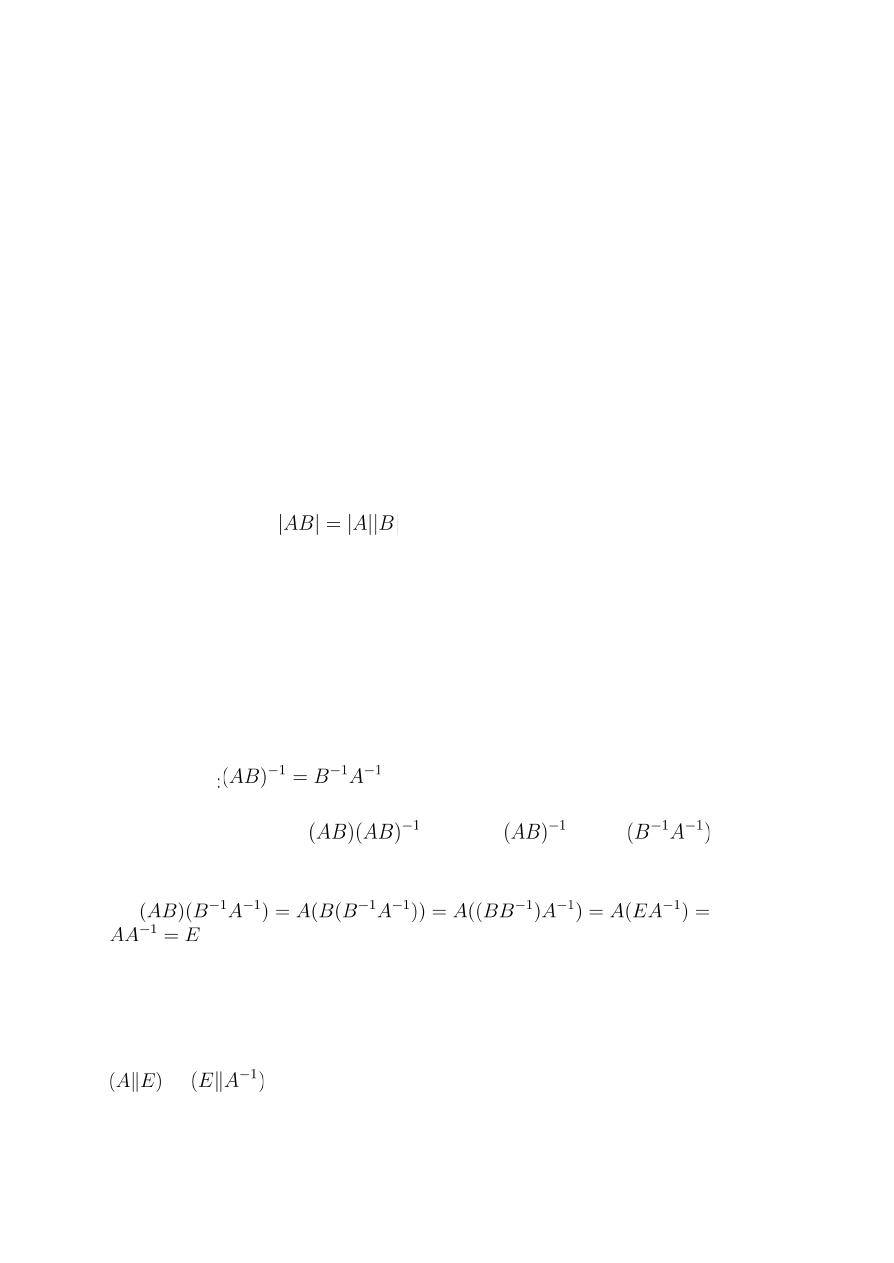
8. Sama järku ruutmaatriksite korrutise determinant on võrdne tegurite determinantide
korrutisega ehk
.
2.peatükk
1) Definitsioon 2.2: ühikmaatriks
Ühikmaatriks on maatriks, mille peadiagonaalil olevad elemendid võrduvad ühega ja
ülejäänud elemendid nulliga.
3) Omadus 2.1: kahe maatriksi korrutise pöördmaatriks, TÕESTUS
Kui maatriksid A ja B on sama järku ruutmaatriksid, millel leiduvad pöördmaatriksid, siis
kehtib võrdus:
Tõestus. Näitame võrdsuse kehtivust, kasutame maatriksite korrutamise assotsiatiivsuse
omadust. Võtame korrutise
ja paneme
asemel
. See
korrutis peab andma ühikmaatriksi.
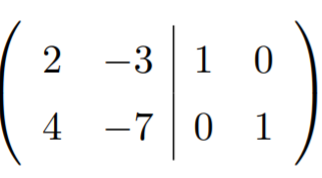
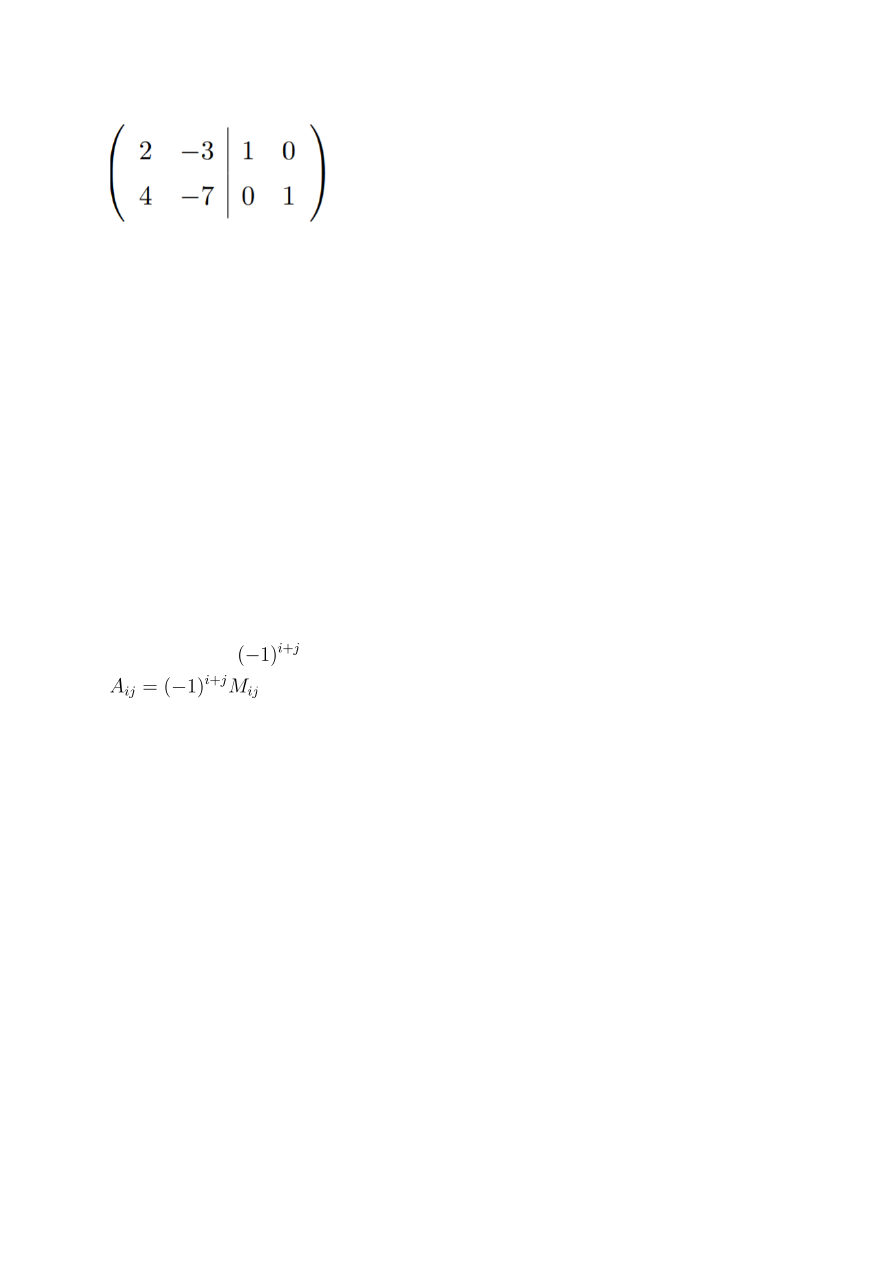
4) Gauss-Jordani meetod pöördmaatriksi leidmiseks
Kui maatriksil A leidub pöördmaatriks, siis saab selle leida Gauss-Jordani meetodiga,
teisendades maatriksi A (ridade elementaarteisenduste abil) ühikmaatriksiks E ja
ühikmaatriksi pöördmaatriksiks A−1
→
5) Definitsioon 2.4: maatriksi ridade elementaarteisendused
Maatriksi ridade elementaarteisendusteks nimetatakse üleminekut maatriksilt uuele
maatriksile järgmiste reeglite abil:
a. Maatriksi kahe rea äravahetamine.
b. Maatriksi rea korrutamine nullist erineva arvuga.
c. Maatriksi reale mingi arvuga korrutatud mingi teise rea liitmine.
Elementaarteisendusi saab ainult ridadega teha.
6) Definitsioon 2.5: regulaarne, singulaarne maatriks
Regulaarne maatriks - ruutmaatriks, mille determinant ei võrdu nulliga (leidub
pöördmaatriks)
Singulaarne maatriks - ruutmaatriks, mille determinant võrdub nulliga (ei leidu
pöördmaatriks)
7) Definitsioon 2.6: maatriksi elemendi alamdeterminant
Elemendi aij alamdeterminandiks Aij nimetatakse sellele elemendile vastava miinori Mij
korrutist teguriga
.
9) Lause 2.1: pöördmaatriksi eksisteerimine
Pöördmaatriks eksisteerib siis, kui maatriks on regulaarne ja tegu on ruutmaatriksiga.
10) Definitsioon 2.7: maatriksi
𝑘
-järku miinor
Valime maatriksis A suvaliselt k rida ja k veergu, kus k ≤ m ja k ≤ n. Moodustame nendes
ridades ja veergudes olevatest elementidest maatriksi, säilitades ridade ja veergude järjestuse.
Selle maatriksi determinanti nimetatakse maatriksi A k-järku miinoriks.
Ehk pmst võtad maatriksist k-järku ruutmaatriksi ja võtad selle determinandi
11) Definitsioon 2.8: maatriksi astak
Maatriksi astak on maatriksi suurimat järku miinori järk. Tähistatakse rank A, rank(A) või
r(A).
12) Maatriksi astaku leidmine elementaarteisenduste abil
Efektiivsem viis maatriksi astaku leidmiseks on kasutada maatriksi ridade
elementaarteisendusi, eesmärgiga teisendada maatriksis kõik elemendid ühele poole
peadiagonaali nullideks.
Elementaarteisendusi kasutades maatriksi astak ei muutu!
14) Definitsioon 2.1: lineaarvõrrandisüsteemi lahend
Süsteemi lahendiks nim. sellist tundmatute väärtuste komplekti, mille korral on rahuldatud
kõik süsteemi võrrandid.
15) Definitsioon 2.11: vastuoluline süsteem
Vastuoluline süsteem on süsteem, millel lahend puudub.
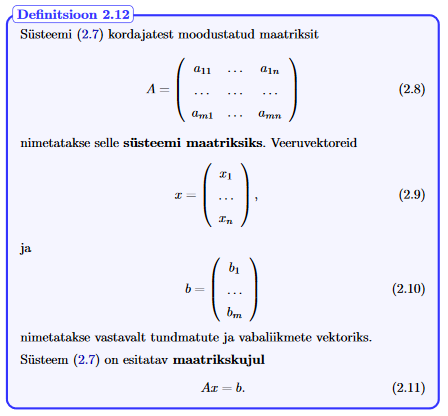
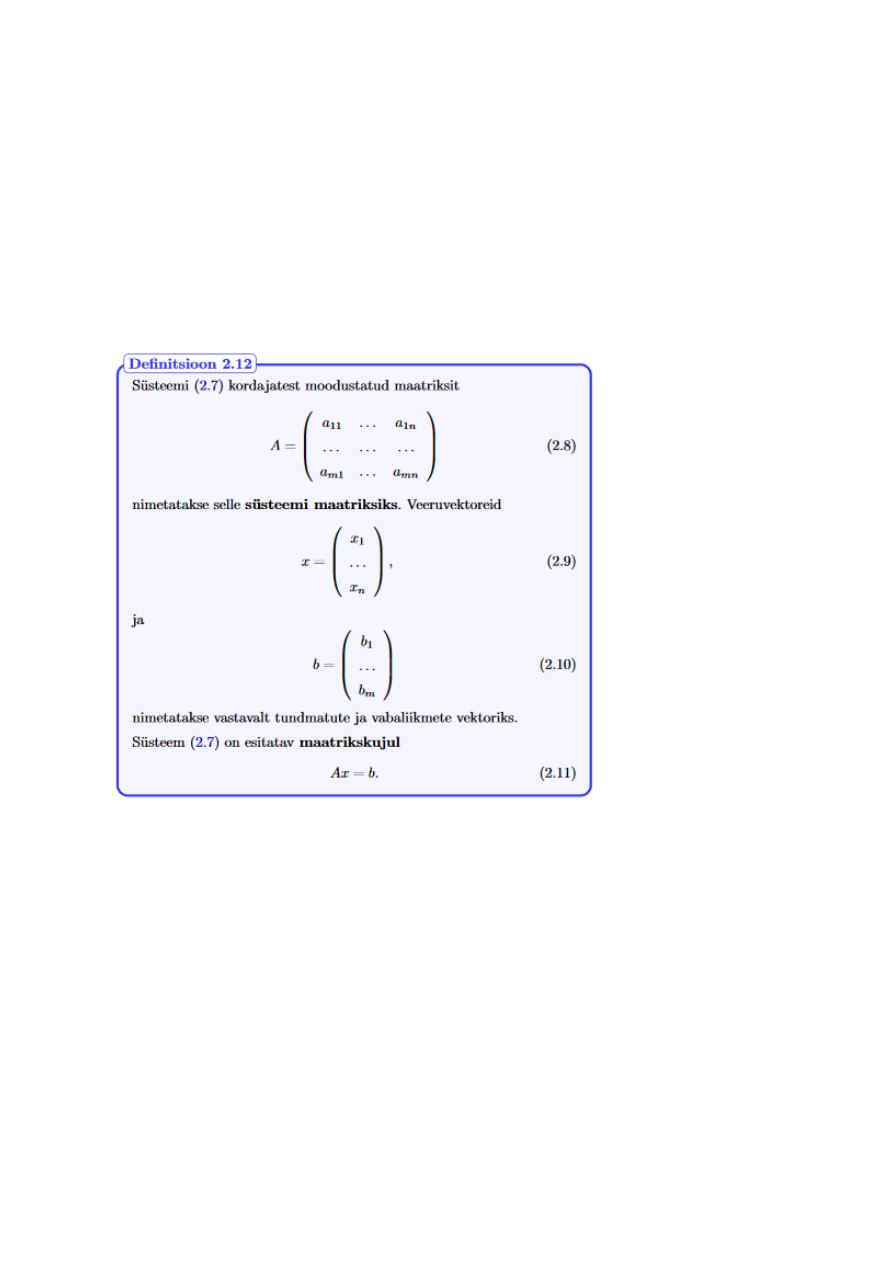
16) Definitsioon 2.12: lineaarvõrrandisüsteemi maatrikskuju
3.peatükk
1) Definitsioon 3.2: funktsioon
Olgu antud hulk X ⊂ R. Kui igale arvule x ∈ X on vastavusse seatud üks ja ainult üks
reaalarv y, siis öeldakse, et hulgal X on defineeritud funktsioon f, mida märgitakse y = f(x).
2) Definitsioon 3.5: paarisfunktsioon, paaritu funktsioon, märkus 3.5: paaris ja paaritu
funktsiooni graafik
Paarisfunktsioon - kui f(-x) = f(x), iga
korral
𝑥 ∈ 𝑋
Paaritu funktsioon - kui f(-x) = -f(x), iga
korral
𝑥 ∈ 𝑋
Graafikud:
Paaris - sümmeetriline y-telje suhtes
Paaritu - sümmeetriline nullpunkti suhtes
3) Definitsioon 3.6: üksühene funktsioon, märkus 3.6 üksühesuse tähendus
Üksühene e. injektiivne funktsioon - Funktsiooni f : X → Y nimetatakse üksüheseks
funktsiooniks, kui iga x1, x2 ∈ X , x1 != x2, korral ka funktsiooni väärtused on erinevad
hulgas Y , s.t f(x1) != f(x2).
4) Definitsioon 3.9: liitfunktsioon
Funktsioonide f ja g liitfunktsiooniks ehk kompositsiooniks nimetatakse funktsiooni h : X →
Z, mis defineeritakse võrdusega h(x) = g( f(x) ), x ∈ X. Kasutatakse kirjutisi h = gf või h = g
◦ f.
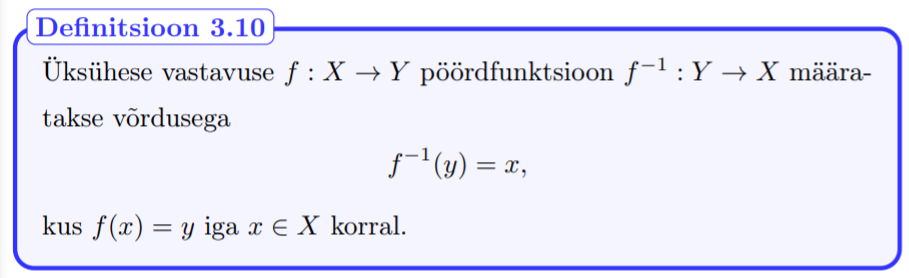
5) Definitsioon 3.10: pöördfunktsioon
6) Definitsioon 3.12: elementaarfunktsioon
Elementaarfunktsioonideks nimetatakse funktsioone, mis on saadavad põhilistest
elementaarfunktsioonidest lõpliku arvu aritmeetiliste tehete ja liitfunktsiooni moodustamise
teel.
4.peatükk
5) Teoreem 4.2: piirväärtuse ühesus
Vaadeldavas protsessis (kas ühe- või kahepoolses) saab funktsioonil olla ainult üks
piirväärtus.
6) Definitsioon 4.12: hulgal
𝑋
tõkestatud funktsioon
Funktsiooni f nim. tõkestatuks hulgal X, kui leidub arv M > 0 nii, et
iga
korral.
10) Teoreem 4.6: elementaarfunktsioonide piirväärtus
Kui f on elementaarfunktsioon ja punkt a kuulub tema määramispiirkonda, a ∈ X, siis
16) Definitsioon 4.14: funktsiooni pidevus hulgal
𝑋
Funktsioon f on pidev hulgal X, kui f on pidev selle hulga igas punktis. Kui X = R, siis
ütleme, et funktsioon f on pidev kõikjal.
17) Lause 4.3: tehetega seotud pidevuse omadused
18) Teoreem 4.8: elementaarfunktsioonide pidevus
Kõik elementaarfunktsioonid on pidevad oma määramispiirkonnas.
5.peatükk
3) Teoreem 5.1: Punktis diferentseeruva funktsiooni pidevus, TÕESTUS
Punktis lõplikku tuletist omav funktsioon on pidev selles punktis
4) Definitsioon 5.4: diferentseerimine
Diferentseerimine on funktsiooni f tuletise leidmine.
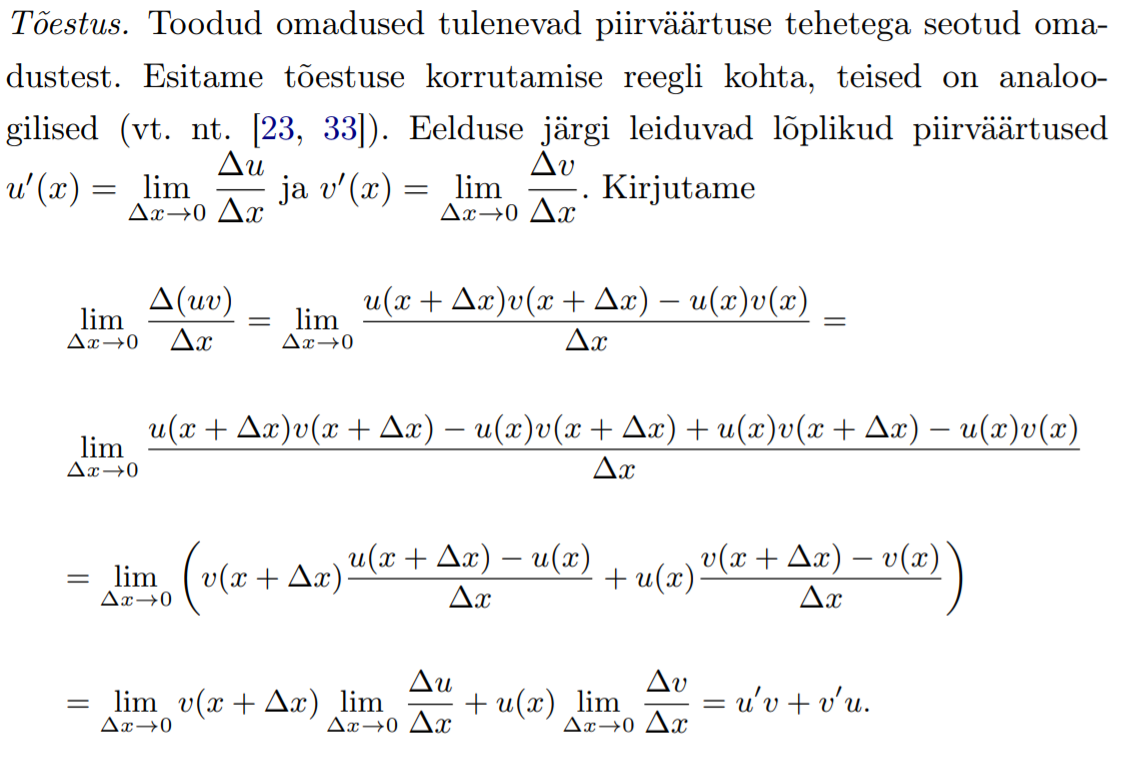
7) Teoreem 5.2: kahe funktsiooni korrutise tuletise valem, TÕESTUS
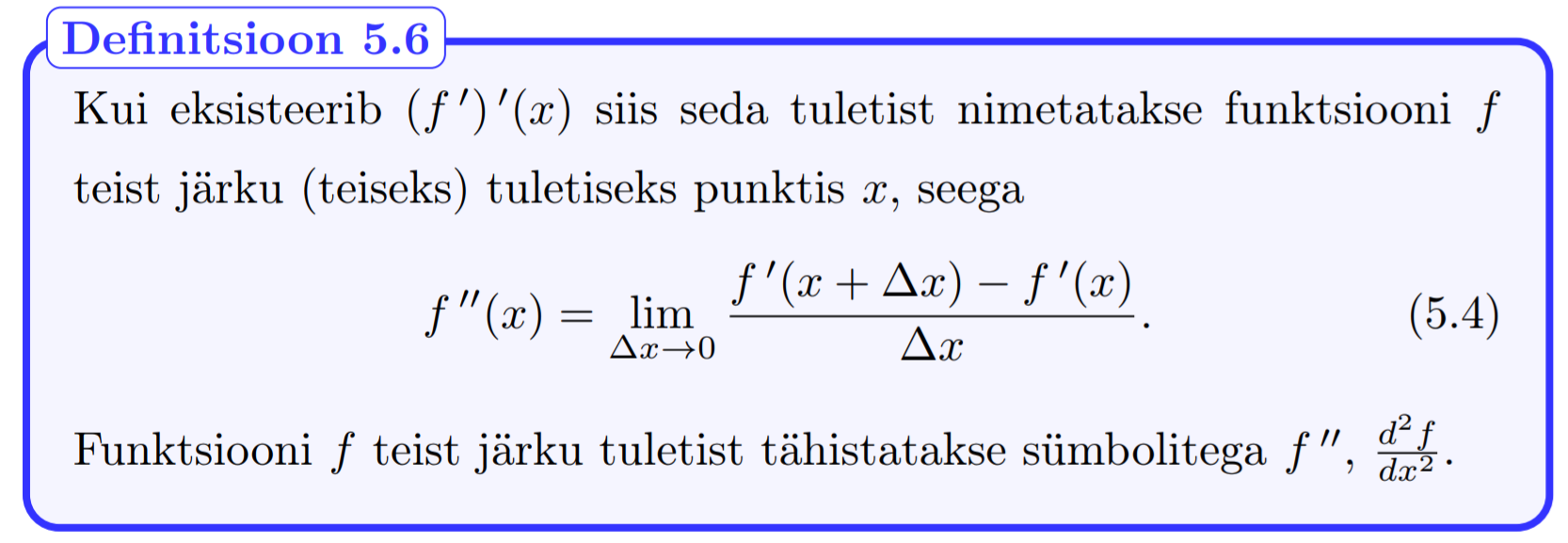
9) Definitsioon 5.6: teist järku tuletis
10) Definitsioon 5.9: joone puutuja
Joone puutujaks punktis A nimetatakse sirget, mis on lõikaja AB piirseisuks, kui punkt B
läheneb punktile A mööda joont y = f(x). Funktsiooni f tuletis f ‘(x0) on selle joone puutuja
tõus punktis (x0, f(x0)) ja puutuja võrrand avaldub järgmiselt:
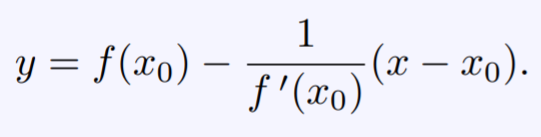
11) Definitsioon 5.10: joone normaal
Joone y = f(x) normaaliks (ehk ristsirgeks) punktis (x0, f(x0)) nimetatakse sirget, mis ristub
seda punkti läbiva puutujaga. Joone y = f(x)
normaali võrrand avaldub järgmiselt:
14) Definitsioon 5.12: funktsiooni lineaarne lähendamine
Valemi
kasutamist nimetatakse ka funktsiooni f lineaarseks lähendamiseks punktis x0, sest f(x)
leitakse ligikaudselt, kui lineaarse funktsiooni väärtus (f(x0 + ∆x) väärtus arvutatakse
lineaarse sirge –
funktsiooni f puutuja – peal).
6.peatükk
1) Definitsioon 6.1: funktsiooni maksimaalne ja minimaalne väärtus
Olgu funktsioon f määratud hulgal D.
● Ütleme, et funktsioonil f on maksimaalne väärtus hulgal D punktis c ∈ D, kui
f(x) ≤ f(c) iga x ∈
D korral.
● Analoogiliselt ütleme, et funktsioonil f on minimaalne väärtus hulgal D punktis c ∈
D, kui
f(x) ≥ f(c) iga x ∈
D korral.
2) Teoreem 6.1: Fermat’ teoreem
Kui vahemikus (a,b) diferentseeruval funktsioonil f on olemas maksimaalne või minimaalne
väärtus punktis
, siis
𝑐 ∈ (𝑎, 𝑏)
𝑓'(𝑐) = 0
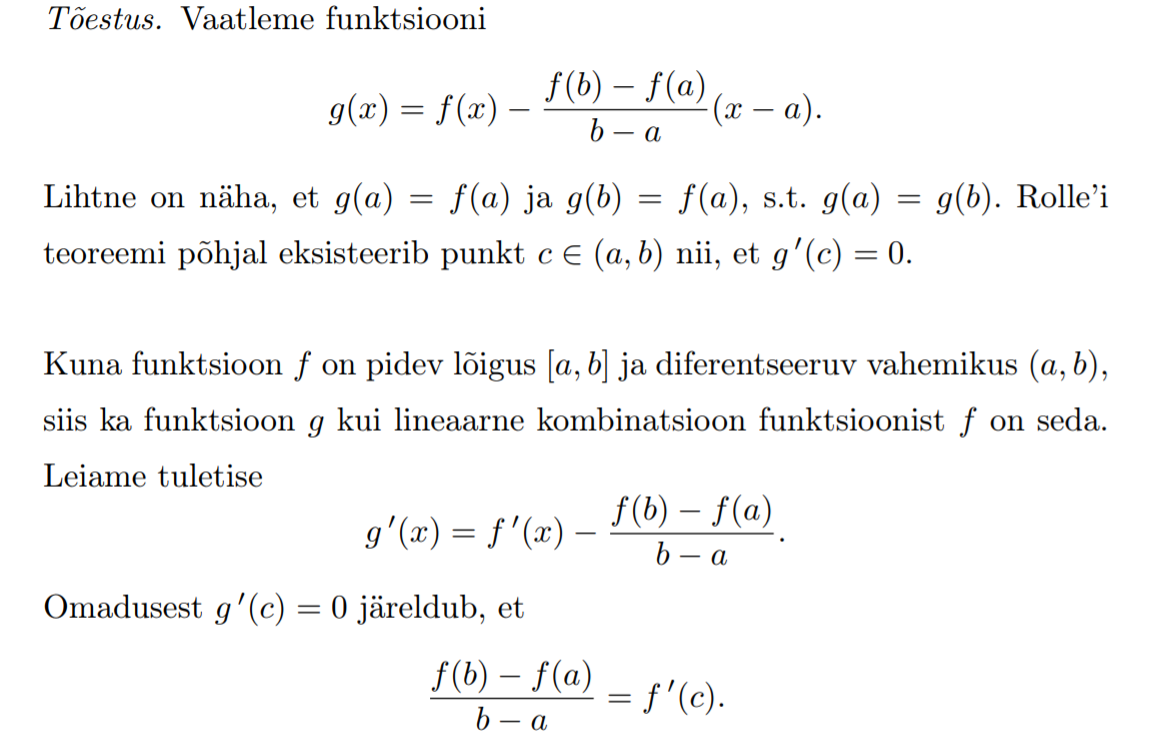
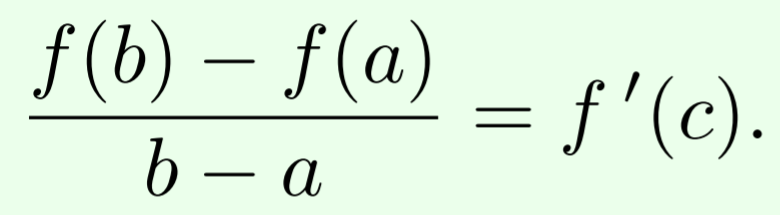
4) Teoreem 6.3: Lagrange’i keskväärtusteoreem, geomeetriline tõlgendus (märkus 6.3),
TÕESTUS
Kui funktsioon f on pidev lõigus [a, b] ja diferentseeruv vahemikus (a, b), siis eksisteerib
selline punkt c ∈ (a, b), nii et
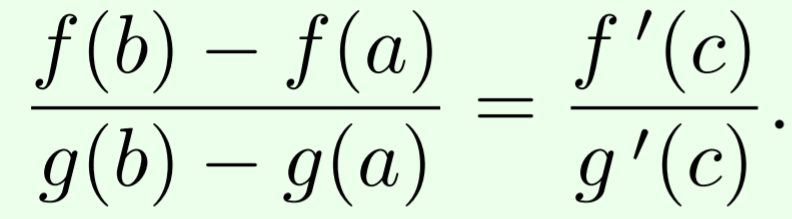
5) Teoreem 6.4: Cauchy keskväärtusteoreem
Kui funktsioonid f ja g on pidevad lõigus [a, b] ja diferentseeruvad vahemikus (a, b) ning
g’(x) != 0 iga x ∈ (a, b) korral, siis eksisteerib selline punkt c ∈ (a, b), nii et kehtib võrdus
7) Definitsioon 6.2: kasvav, kahanev funktsioon hulgas
𝑋
Kasvav - kui suvaliste x1, x2 ∈ R korral, kus x1 < x2, kehtib f(x1) < f(x2).
Kahanev - kui x1 < x2 korral f(x1) > f(x2)
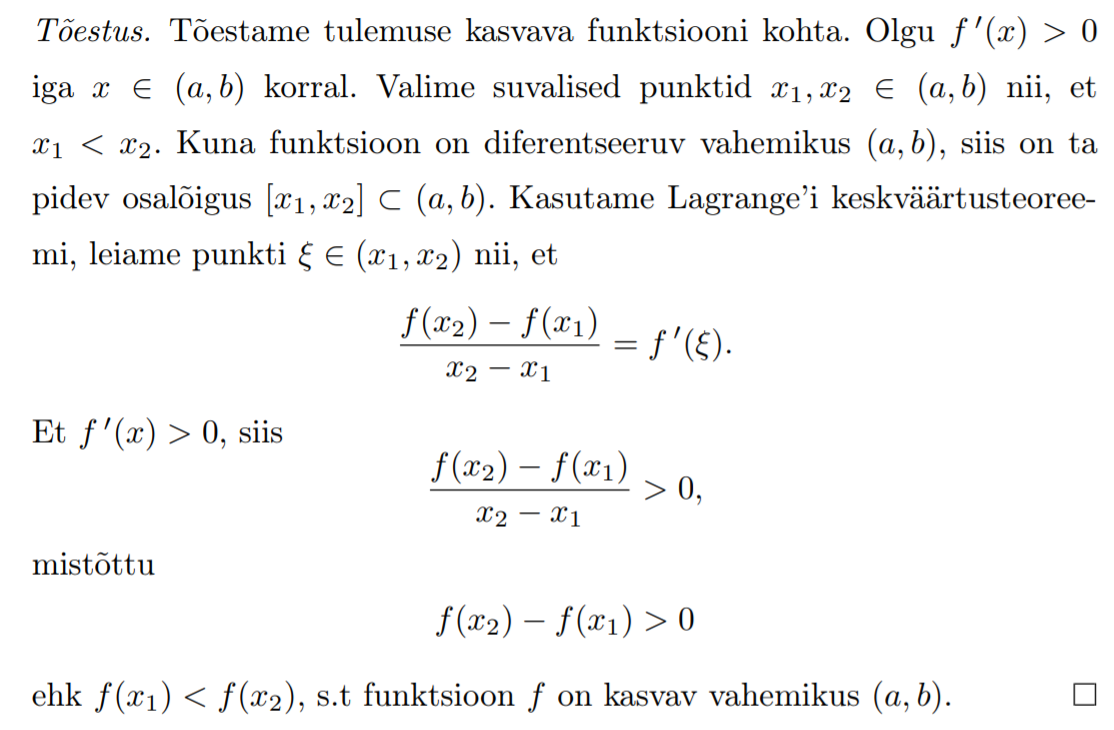
8) Teoreem 6.6: kasvav, kahanev funktsioon vahemikus (
𝒂
, 𝒃
),TÕESTUS (kasvav ja
kahanev)
Kasvav - Kui f’(x) > 0 iga argumendi väärtuse x ∈ (a, b) korral
Kahanev - a kui f’(x) < 0 iga argumendi väärtuse x ∈ (a, b) korral
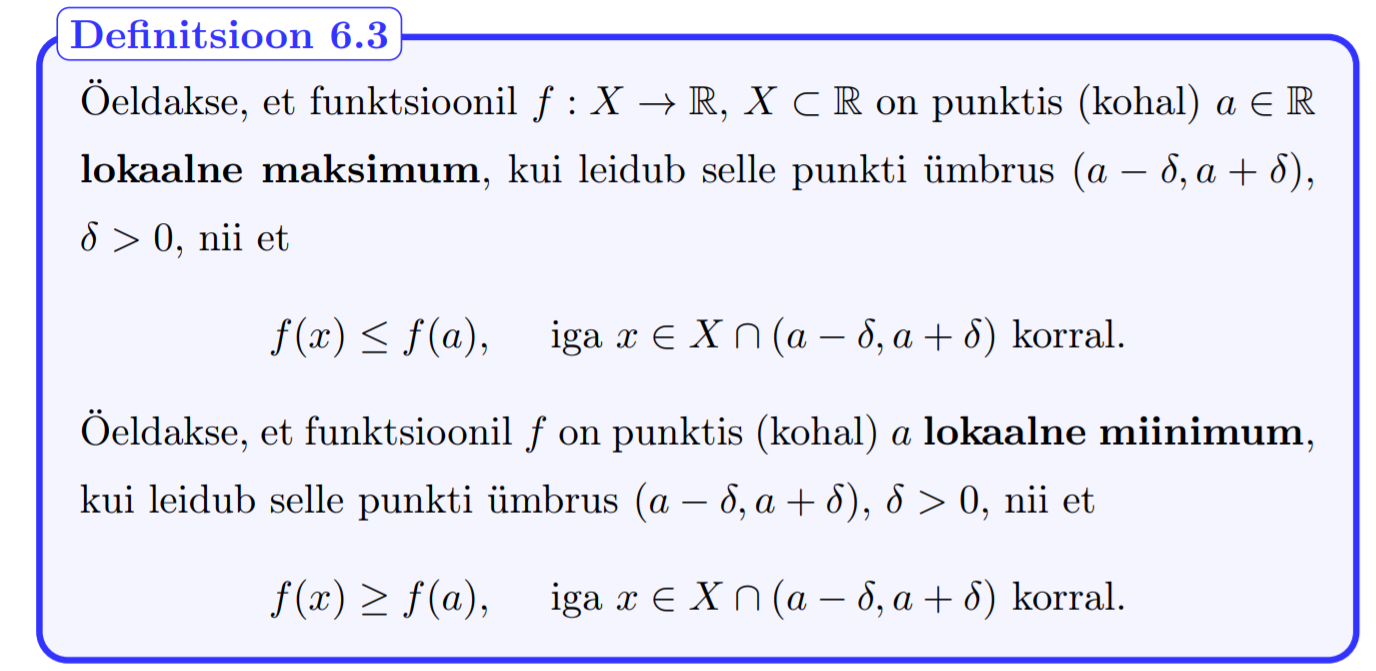
9) Definitsioon 6.3: funktsiooni lokaalne maksimum ja miinimum
10) Definitsioon 6.4: funktsiooni kriitilised punktid
Funktsiooni kriitilised punktid on määramispiirkonna punktid, kus f’(x) = 0, ja punktid, kus
funktsioon f ei ole diferentseeruv. (
NB! Need kaks omadust ei saa olla samaaegselt seega
parem oleks öelda: “kus f’(x) = 0
või f’(x) pole olemas aga f(x) on olemas”)
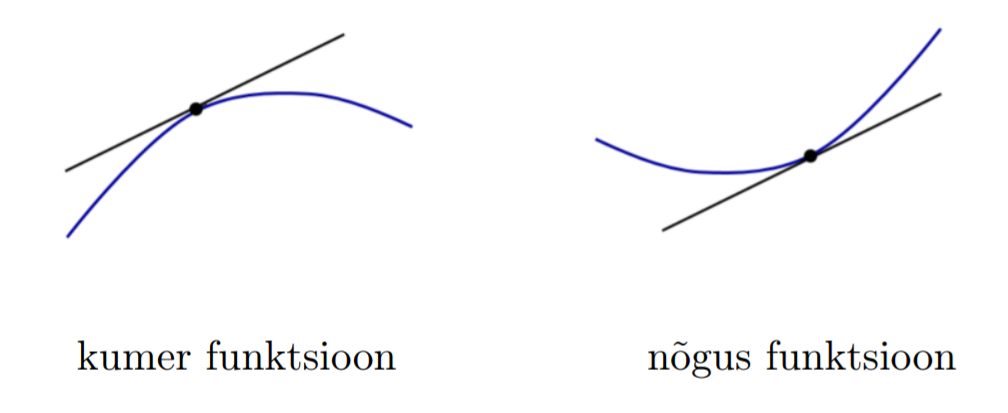
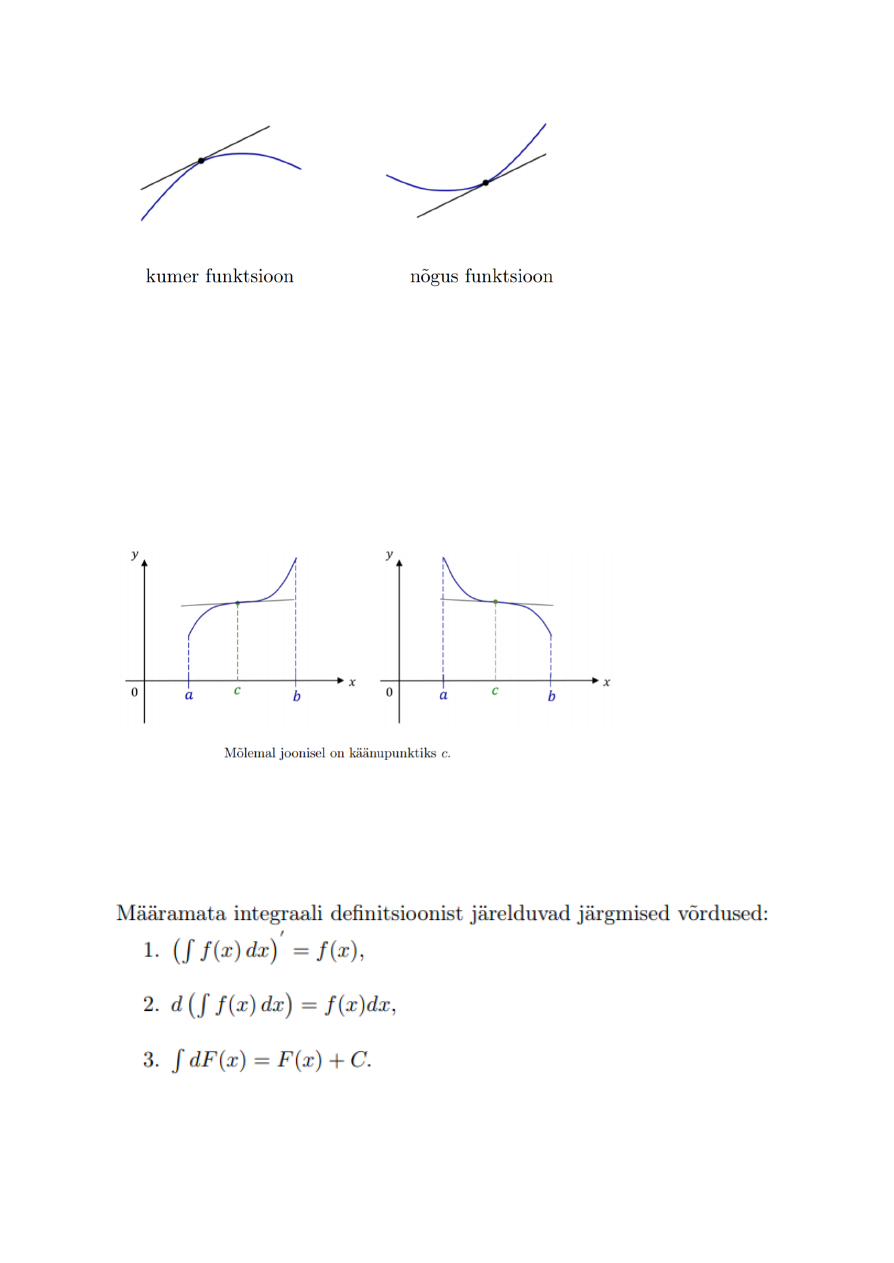
13) Definitsioon 6.5: kumer, nõgus funktsioon
Kumer funktsioon - igas punktis x ∈ (a, b) funktsiooni f puutuja asub ülalpool graafikut
Nõgus funktsioon - igas punktis x ∈ (a, b) funktsiooni f puutuja asub allpool graafikut
14) Teoreem 6.8: tingimused funktsiooni kumeruseks, nõgususeks vahemikus
Olgu funktsioon f kaks korda diferentseeruv vahemikus (a, b).
● Kui f’’(x) < 0 iga x ∈ (a, b) korral, siis f on kumer selles vahemikus.
● Kui f’’(x) > 0 iga x ∈ (a, b) korral, siis f on nõgus selles vahemikus
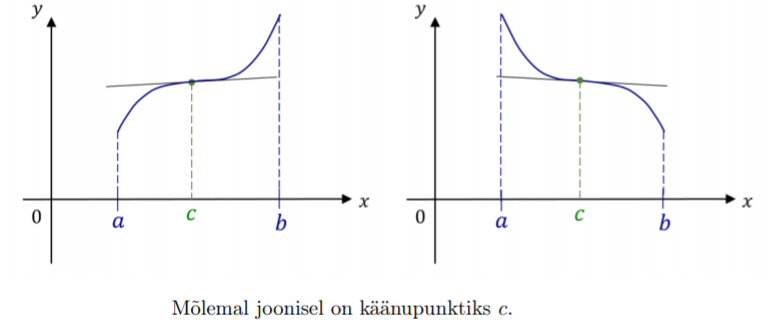
15) Definitsioon 6.6: funktsiooni käänupunkt
Olgu funktsioon f diferentseeruv vähemalt vahemikes (a, c) ja (c, b) ning pidev punktis c.
Kui funktsioon f on kumer vahemikus (a, c) ja nõgus vahemikus (c, b) (või nõgus vahemikus
(a, c) ja kumer vahemikus (c, b)), siis punkti c nimetatakse käänupunktiks.
7.peatükk
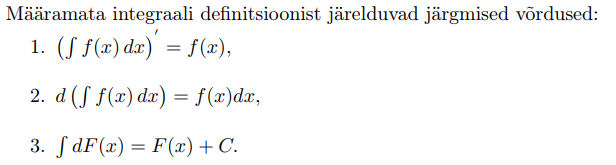
4) Märkus 7.2 määramata integraali definitsioonist järelduvad võrdused, näidata
definitsiooni põhjal kehtivust
1. Triviaalne lmao
2. Võtad integraali vasaku poole sulust, saad d(F(x))
Jagad mõlemad pooled dx-iga läbi
(d(F(x)) / dx) -> F’(x) (sest teame analoogselt, et dy/dx = y’(x))
Saad, et F’(x) = f(x)
3. Mdea kas piisab, aga kui lihts integraal dx-ist on x + C, siis eeldaks, et integraal
d(F(x))-ist on F(x) + C..?
-Kuri
5) Teoreem 7.1: algfunktsiooni eksisteerimise tingimus
Igal vahemikus (a, b) pideval funktsioonil on olemas algfunktsioon selles
vahemiku
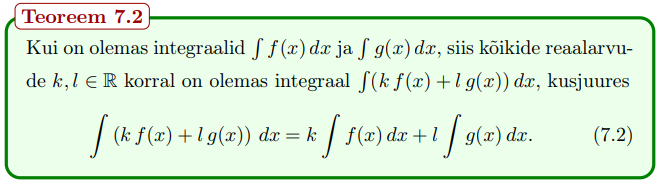
6) Teoreem 7.2: tehetega seotud integreerimisreegel, TÕESTUSEGA
Ehk pmst liitmisi võib võtta eraldi integraalidena ja skalaare võib integraali ette tuua.
9) Definitsioon 7.4: lihtmurd, liigmurd
8.peatükk
1) Definitsioon 8.1: diferentsiaalvõrrand
Diferentsiaalvõrrandiks nimetatakse võrrandit, milles on otsitavaks
ühe või mitme muutuja funktsioon ning see võrrand seob otsitavat
funktsiooni ja tema tuletisi sõltumatute muutujatega.
2) Definitsioon 8.2: harilik diferentsiaalvõrrand
Harilikuks diferentsiaalvõrrandiks nimetatakse diferentsiaalvõrrandit, kus otsitav funktsioon
on ühe muutuja funktsioon.
3) Definitsioon 8.3: diferentsiaalvõrrandi lahend
Hariliku diferentsiaalvõrrandi lahendiks intervallis (a, b) nimetatakse
selles vahemikus määratud funktsiooni, mis on selles intervallis diferentseeruv ning mille
asetamine võrrandisse otsitava funktsiooni asemele muudab võrrandi samasuseks sõltumatu
muutuja suhtes selles
intervallis.
10) Eralduvate muutujatega võrrandi lahendamine üldkujul (konspekt lk. 154)
Eralduvate muutujatega võrrandi lahendamiseks teisendatakse see eraldatud muutujatega
võrrandiks
Eraldi tuleb analüüsida punktihulki f2(x) = 0 ja g1(y) = 0
14) Lineaarse homogeense diferentsiaalvõrrandi lahendamine üldkujul (konspekt lk.
156)
Lineaarse homogeense diferentsiaalvõrrandi lahendi üldkuju on
.
Nii jääbki.
9.peatükk4) Definitsioon 9.4: integreeruv funktsioon
Kui funktsioonil eksisteerib Riemanni integraal, siis öeldakse, et funktsioon on integreeruv
(Riemanni mõttes)
5) Teoreem 9.1: lõigus pideva funktsiooni integreeruvus
Kui funktsioon on pidev lõigus [a, b], siis on ta integreeruv lõigus [a, b].
6) Definitsioon 9.5: rajade vahetamine, ühtelangevate rajadega integraal
10.peatükk
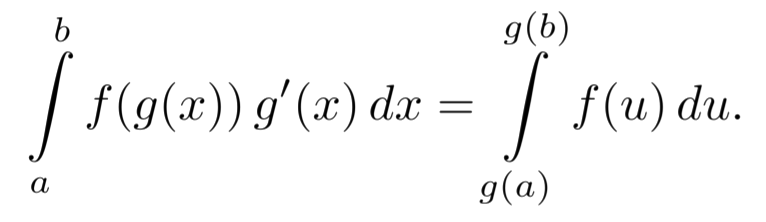
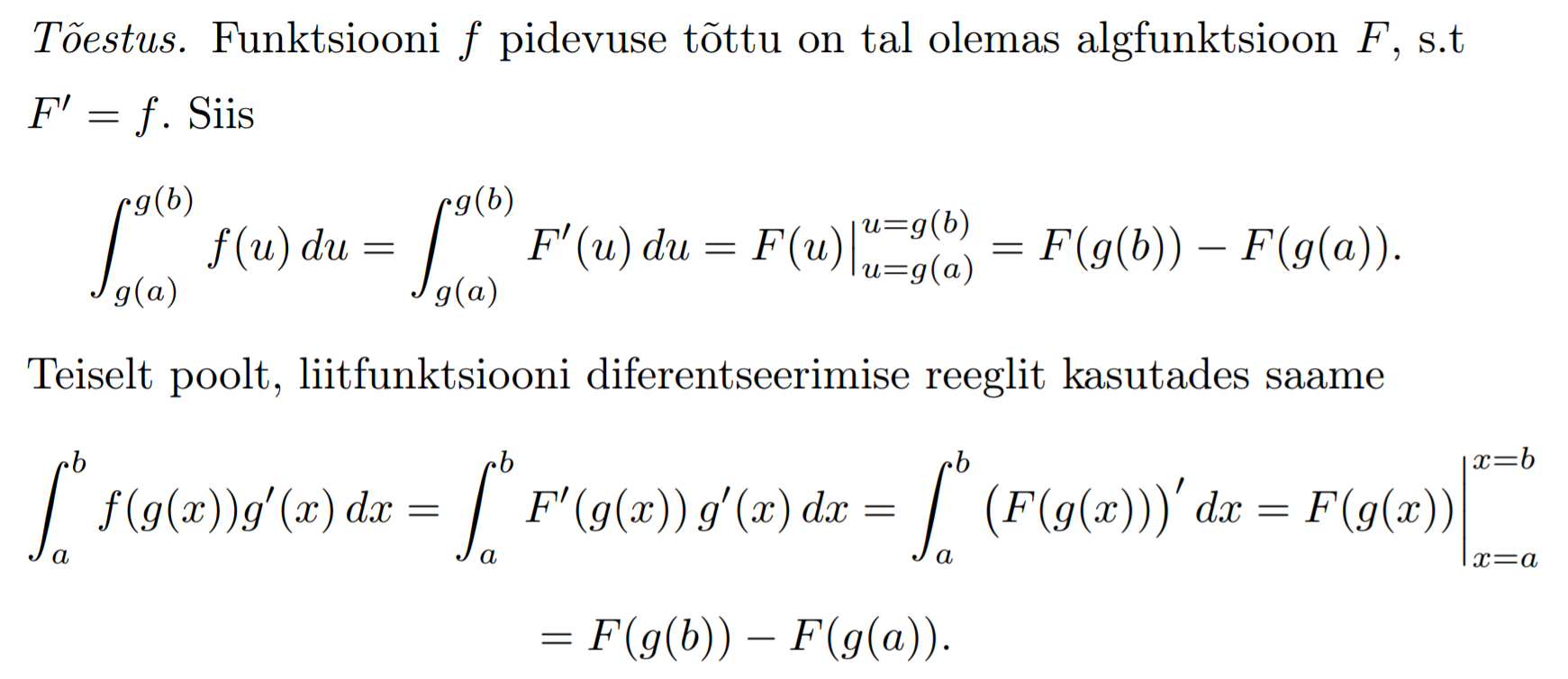
2) Teoreem 10.2: Muutujavahetuse valem määratud integraalis, näidata valemi
kehtivust
Kui g’ on pidev lõigus [a, b] ja f on pidev funktsiooni g muutumispiirkonnas, siis
muutujavahetusel u = g(x) kehtib võrdus
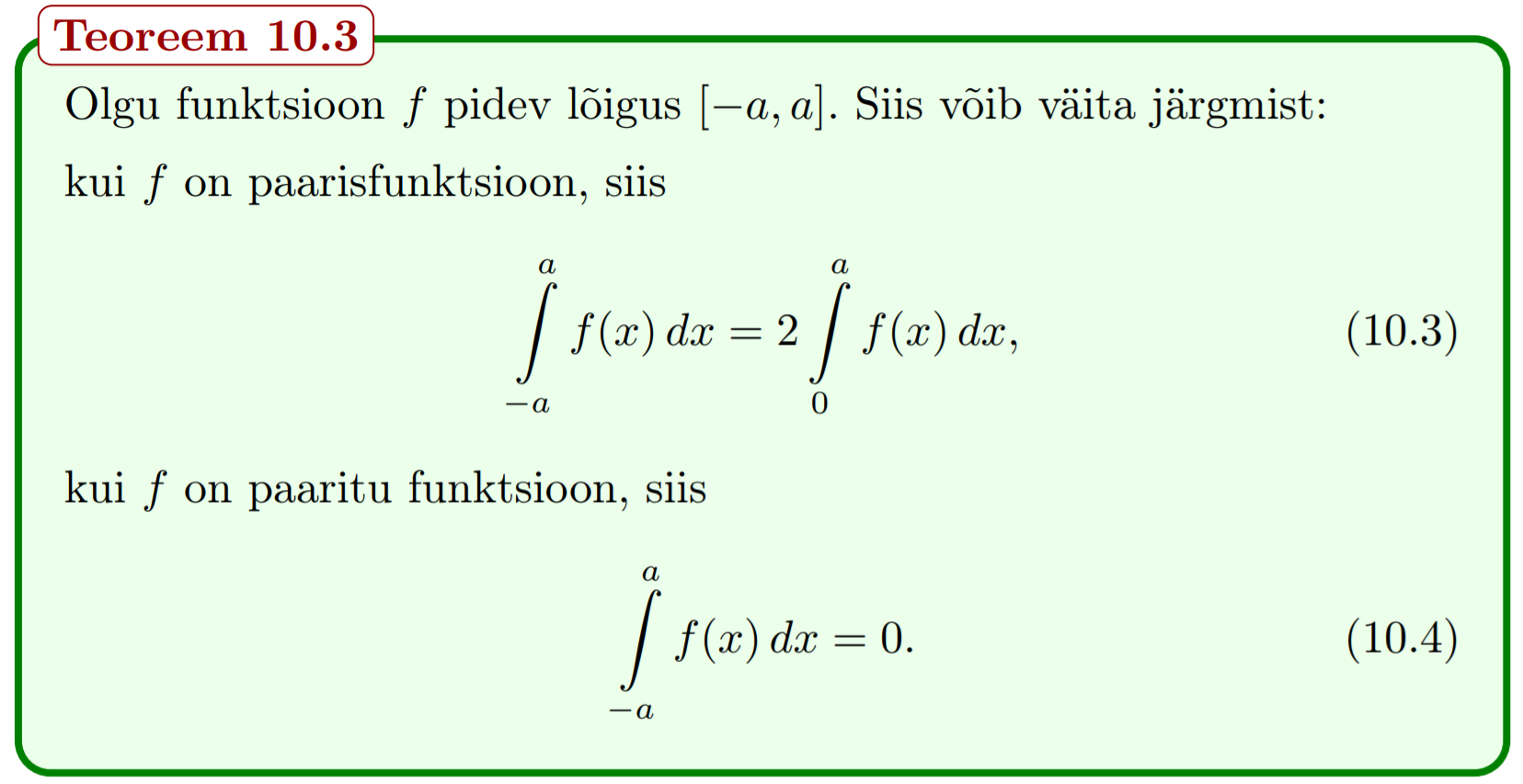
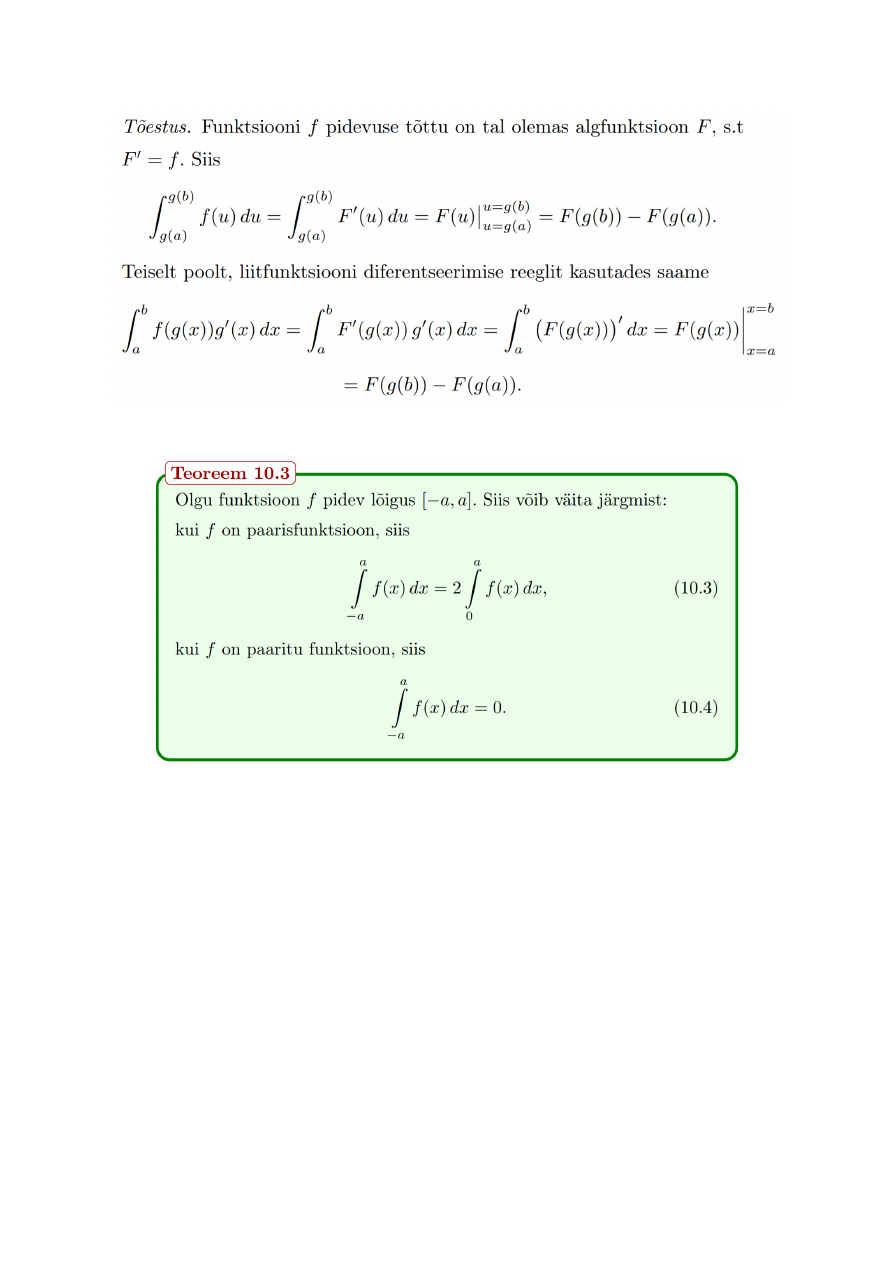
3) Teoreem 10.3: määratud integraal sümmeetriliselt paiknevate rajade korral
(paarisfunktsiooni ja paaritu funktsiooni korral)
4) Määratud integraal absoluutväärtusest
Absoluutväärtus funktsioonist on alati mittenegatiivne. Seega integraali
𝑎
𝑏
∫ |𝑓(𝑥)|𝑑𝑥
väärtus peab tulema samuti mittenegatiivne. Kui vastus tuleb negatiivne, siis peab kuskil
arvutustes olema viga.
Märgime, et kui integraalimärgi all on funktsiooni absoluutväärtus, siis integraali väärtus on
võrdne funktsiooni graafiku, x-telje ning püstsirgetega x = a, x = b piiratud kõvertrapetsi
pindalaga, kus kujundi kõigi osade pindalad loetakse positiivseks.
Kui funktsiooni graafik jääb täielikult ülespoole x-telge, siis on integraali väärtus positiivne
ja kui funktsiooni graafik jääb täielikult allapoole x-telge, siis võtame integraali
miinusmärgiga.
6) Teoreem 10.4: integraalarvutuse keskväärtusteoreem, märkus 10.1
Kui funktsioon f on pidev lõigus [a, b], siis on olemas c ∈ [a, b] nii, et
𝑎
𝑏
∫ 𝑓(𝑥)𝑑𝑥 = 𝑓(𝑐)(𝑏 − 𝑎)
NB!
Lõigus [a, b] pideva funktsiooni f keskväärtus defineeritakse integraali abil võrdusega
𝑓 =
1
𝑏−𝑎
𝑎
𝑏
∫ 𝑓(𝑥)𝑑𝑥
11.peatükk
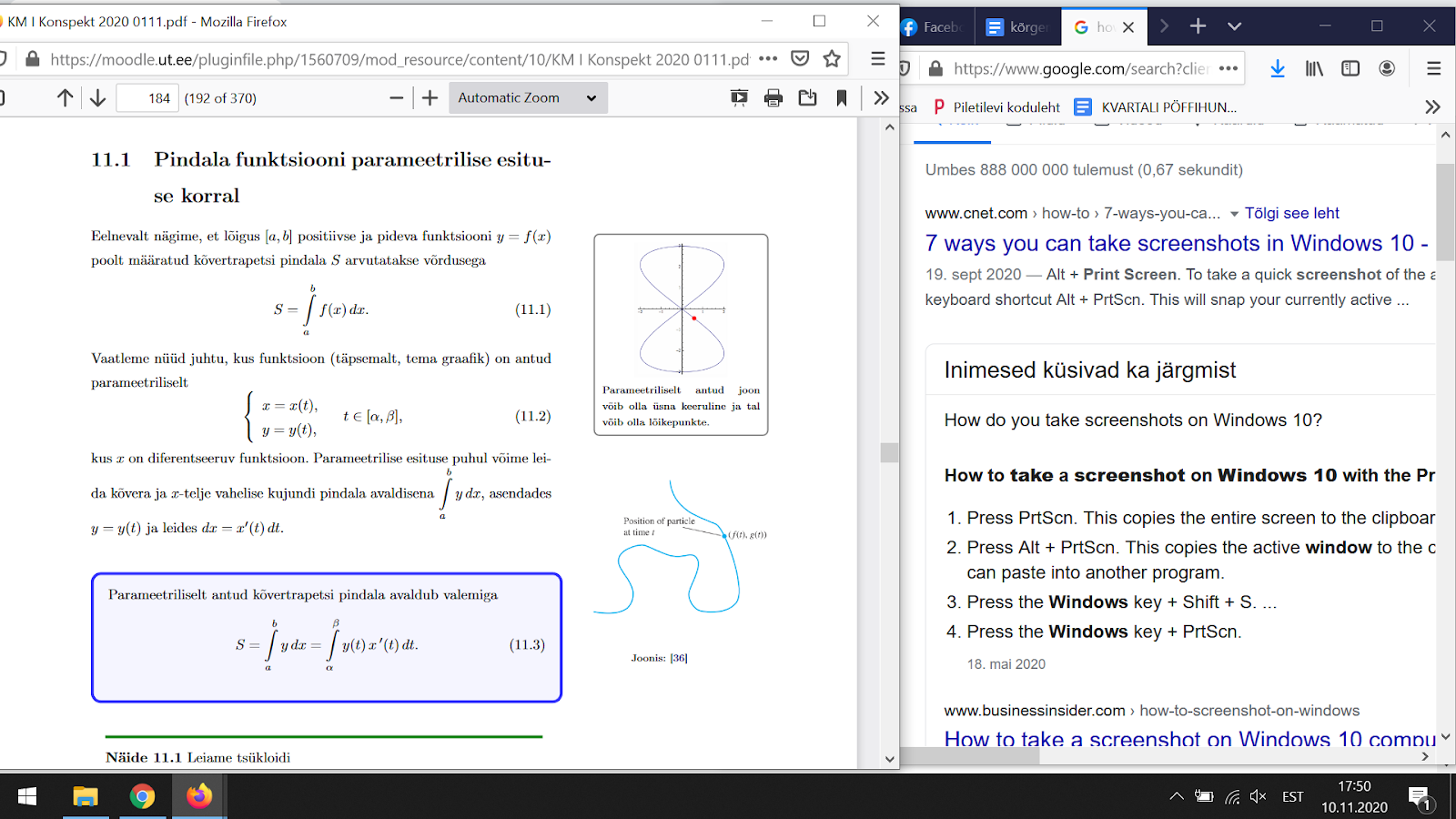
1) Valem 11.3: parameetriliselt antud kõvertrapetsi pindala
Parameetriliselt antud kõvertrapetsi pindala avaldub valemiga 𝑆 =
𝑎
𝑏
∫ 𝑦𝑑𝑥 =
α
β
∫ 𝑦(𝑡)𝑥'(𝑡)𝑑𝑡
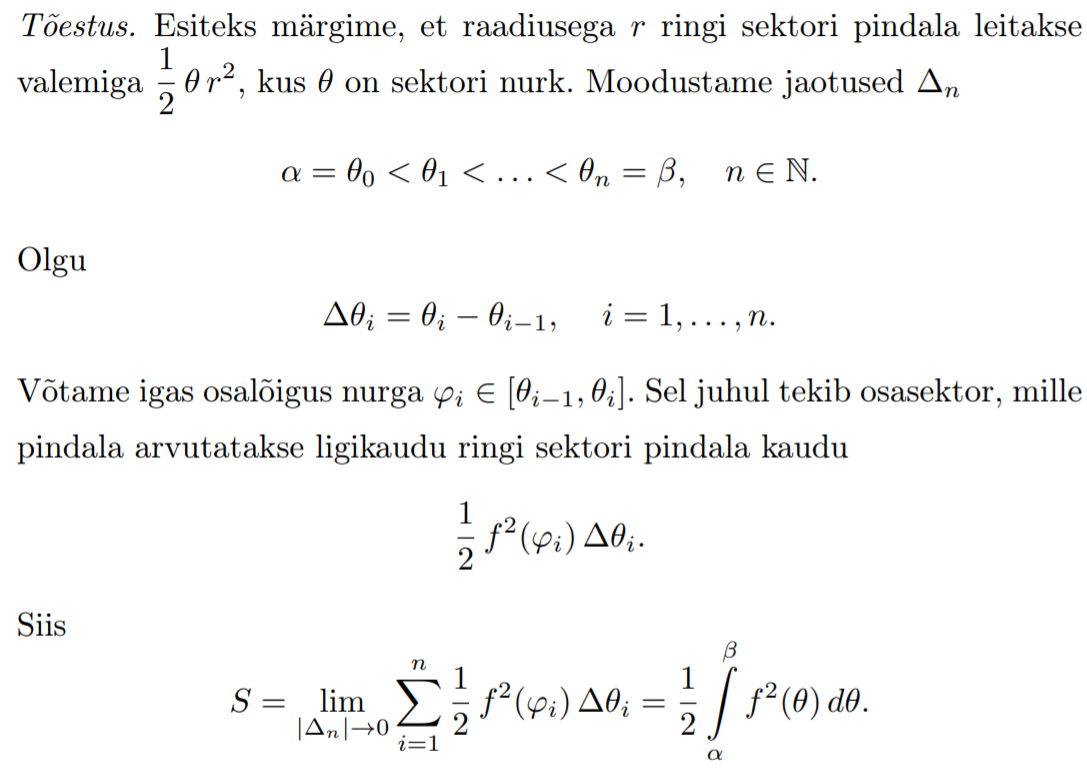
3) Lause 11.1: kõversektori pindala valem, TÕESTUS
Pideva
funktsiooni
määratud
kõversektori
pindala
avaldub
kujul
𝑟 = 𝑓(θ)
.
𝑆 =
1
2
α
β
∫ 𝑓
2
(θ) 𝑑θ
4) Lause 11.2: joone pikkuse valemLõigus
pideva ja vahemikus
diferentseeruva funktsiooni
joone pikkus avaldub
𝑎, 𝑏
[
]
𝑎, 𝑏
(
)
𝑓
valemiga 𝑠 =
𝑎
𝑏
∫ 1 + 𝑓'(𝑥)
[
]
2
𝑑𝑥
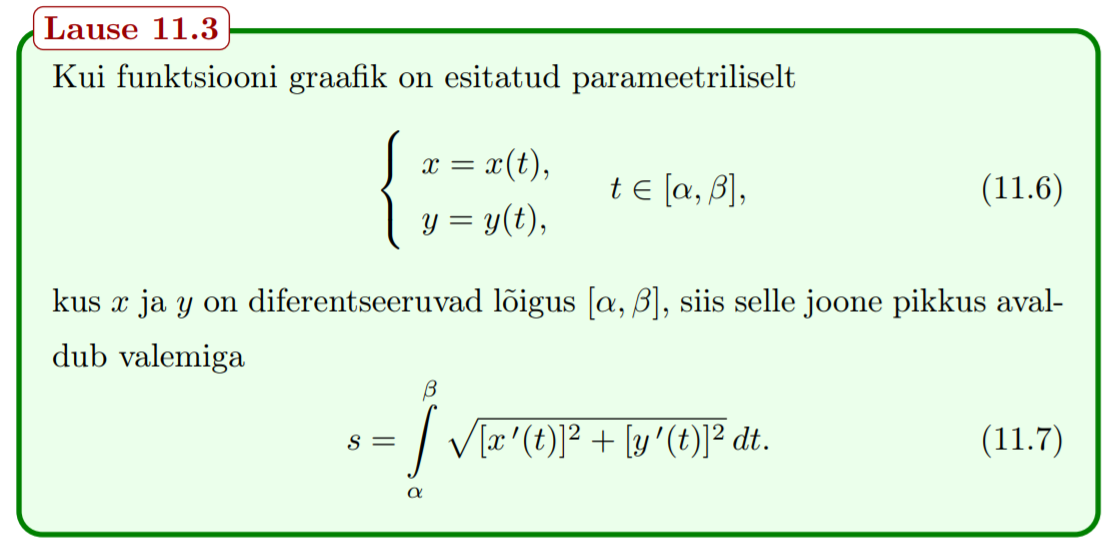
5) Lause 11.3: parameetriliselt esitatud funktsiooni graafiku korral joone pikkuse valem
6) Lause 11.4: keha ruumala valem ristlõikepindala kaudu
Olgu keha piiratud tasanditega, mis on risti x-teljega punktides
ja
. Kui keha
𝑥 = 𝑎
𝑥 = 𝑏
ristlõikepindala igas punktis
on
ja on pidev funktsioon lõigus
, siis keha
𝑥 ∈ [𝑎, 𝑏]
𝑆(𝑥)
𝑆
𝑎, 𝑏
[
]
ruumala avaldub valemiga
.
𝑉 =
𝑎
𝑏
∫ 𝑆(𝑥)𝑑𝑥
7) Järeldus 11.1 ümber
𝑥
- telje pöörleva keha ruumala
Olgu
pidev mittenegatiivne funktsioon lõigus
ja olgu S joone
alla jääv
𝑓
𝑎, 𝑏
[
]
𝑦 = 𝑓(𝑥)
pindala. Siis ümber x-telje pöörleva joonega moodustatud keha ruumala avaldub valemiga
𝑉 = π
𝑎
𝑏
∫ 𝑓
2
(𝑥)𝑑𝑥.
8) Valem 11.13: teepikkuse arvutamine sirgjoonelisel liikumisel
Olgu
keha liikumise kiirus ja
keha poolt läbitud tee pikkus hetkel t.
𝑣 = 𝑣(𝑡)
𝑠 = 𝑠(𝑡)
Aja
ja
vahel keha poolt läbitud tee pikkus avaldub valemiga
.
𝑡
1
𝑡
2
𝑠 =
𝑡
1
𝑡
2
∫ 𝑣(𝑡)
|
|𝑑𝑡
9) Lause 11.5: liikuvale kehale mõjuva jõu poolt tehtav töö
Mööda x-telge punktist
punkti
liikumissuunas muutuva jõu F(x) poolt tehtav
𝑥 = 𝑎
𝑥 = 𝑏
töö avaldub valemiga
.
𝑊 =
𝑎
𝑏
∫ 𝐹(𝑥)𝑑𝑥
10) Definitsioon 11.2: masskese
Õhukesel plaadil R on massikese punktis
, kui selle plaadi toetamisel nn.nõelale punktis
(𝑥, 𝑦)
jääb plaat tasakaalu.
(𝑥, 𝑦)
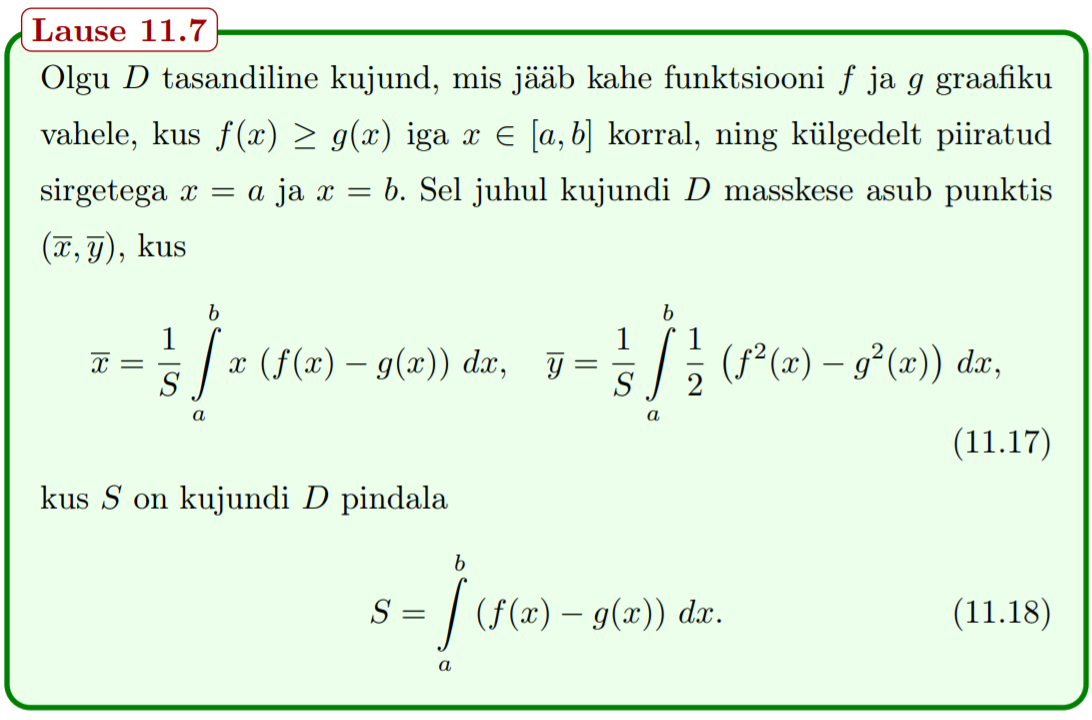
11) Lause 11.7: kujundi masskeskme arvutamine
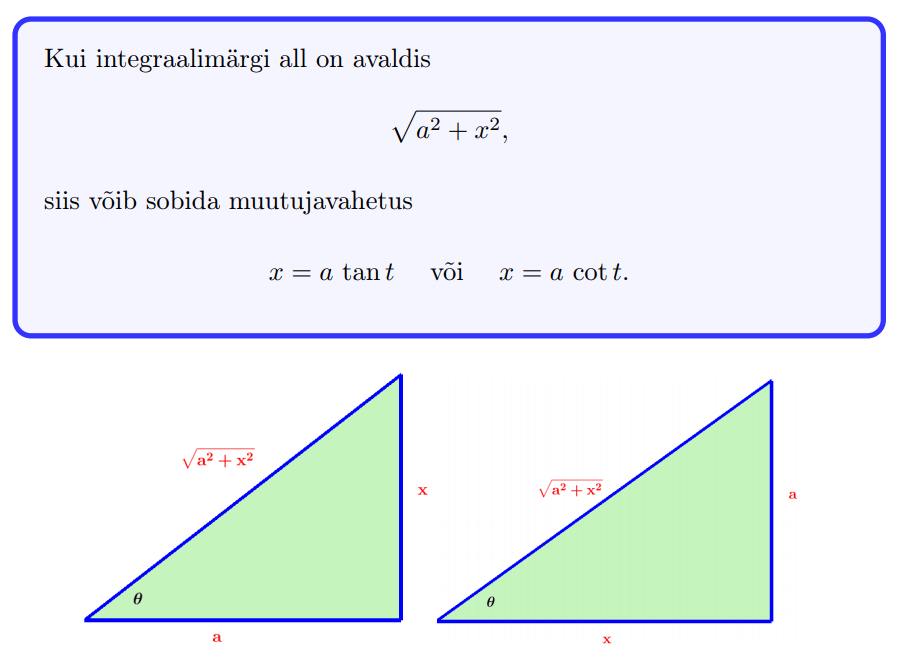
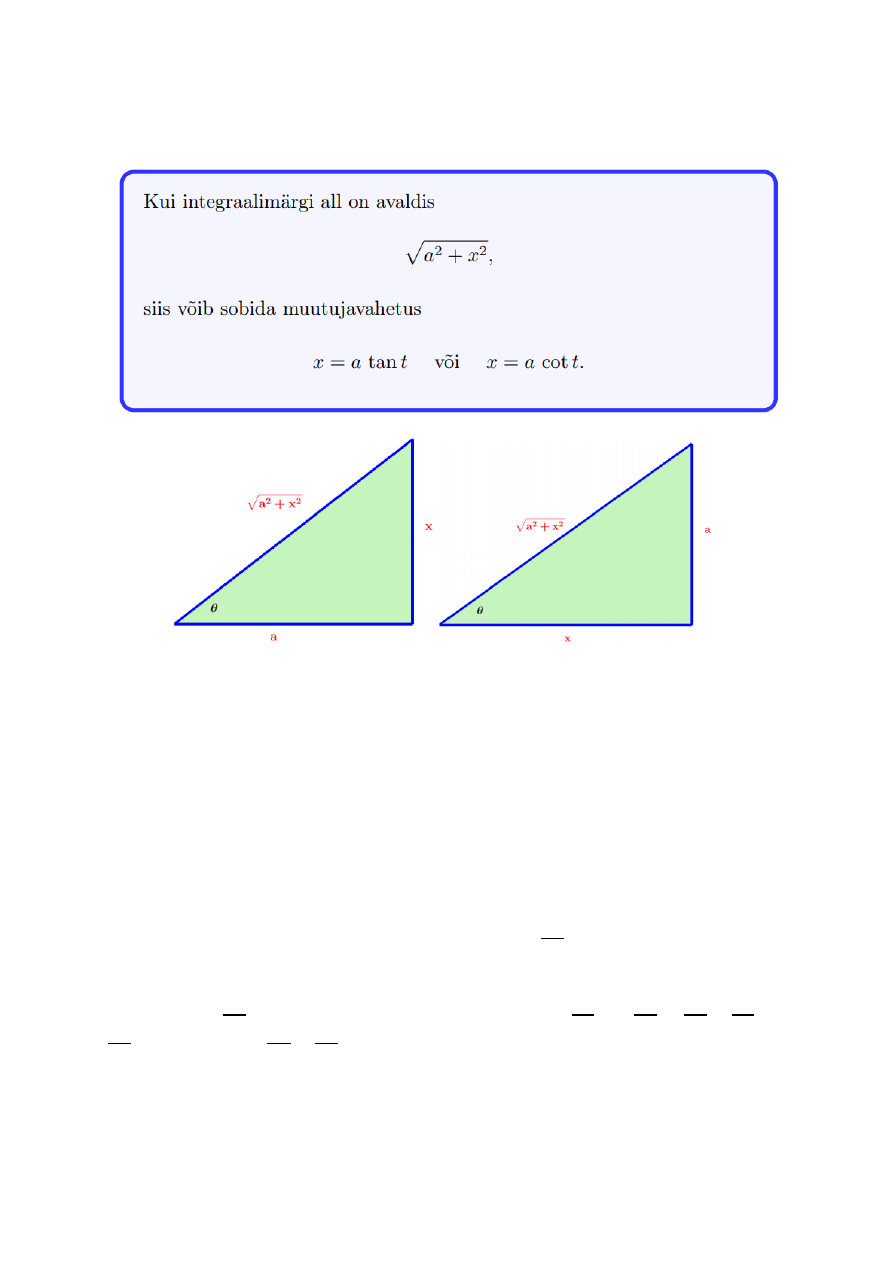
12.peatükk2) Irratsionaalfunktsioonide integreerimisel tehtava muutuja vahetuse tuletamine ühel
(vabalt valitud) juhul (konspekt lk. 212-213)
Märkus:
Siinkohal saab igat pidi need a ja x tuletada Pythagorase kaudu, meetod oleneb probleemist.
Sellega saab määratleda, mis pidi muutujad tulevad ja kuidas üksteisesse suhtuvad
Muutujavahetus tuleb trigonomeetriliselt sin, cos ja tan kaudu kui muutujate suhe on
omavahel määratud.
Põhimõte on igal variandil sama, lihtsalt sobitada omale vajalikult probleemi tarbeks.
13.peatükk
1) Definitsioon 13.1: seotud vektor (suunatud lõik)
Lõiku, millel on fikseeritud alguspunkt, st. suund, nim. suunatud lõiguks ehk seotud
vektoriks. Alguspunktiga X ja lõpp-punktiga Y tähistatakse 𝑋𝑌
2) Definitsioon 13.6: ekvivalentsed seotud vektorid
Seotud vektorit
nimetatakse ekvivalentseks seotud vektoriga
, kui |
| = |
| ja
⇈
𝐴𝐵
𝐵𝐶
𝐴𝐵
𝐵𝐶
𝐴𝐵
. Seda tähistatakse
𝐵𝐶
𝐴𝐵 ∼ 𝐵𝐶
3) Definitsioon 13.7: ekvivalentsiklass
Seotud vektoriga
ekvivalentsete seotud vektorite
ekvivalentsiklassiks moodustajaga
. Viimast tähistatakse AB. Seega
𝐴𝐵
𝐴𝐵 = {𝑋𝑌|𝑋𝑌 ∼ 𝐴𝐵}
4) Definitsioon 13.8: vabavektorid
5) Definitsioon 13.10: vabavektori pikkus
Vabavektori
pikkuseks nim. seotud vektori
pikkust |
| ja tähistatakse |x|.
𝑥 ∈ 𝐸
𝐴𝐵 ∈ 𝑥
𝐴𝐵
6) Definitsioon 13.11: kollineaarsed vabavektorid
Vabavektoreid a,b nimetatakse kollineaarseteks, kui nende vektorite moodustajad ehk seotud
vektorid
ja
on kollineaarsed.
𝐴𝐵 𝐴𝐶
7) Definitsioon 13.12: samasuunalised, vastandsuunalised vabavektorid
Vektorid on samasuunalised, kui nende vektorite moodustajad ehk seotud vektorid
ja
𝐴𝐵 𝐴𝐶
on samasuunalised.
8) Definitsioon 13.19: vektori projektsioon vektori sihile
Vektorit
X’Y’ nimetatakse vektori
x projektsiooniks vektori a sihile paralleelselt sirgega l
(tasandiga π). Vektorit
X’Y’ tähistatakse Prax.
9) Definitsioon 13.20: punkti kohavektor
Mistahes punkti X ∈ E kohavektoriks nimetatakse vektorit OX ∈ E
Igal punktil X ∈ E on olemas kohavektor x = OX. Teistpidi, igal vektoril x ∈ E on olemas
punkt X nii, et x = OX
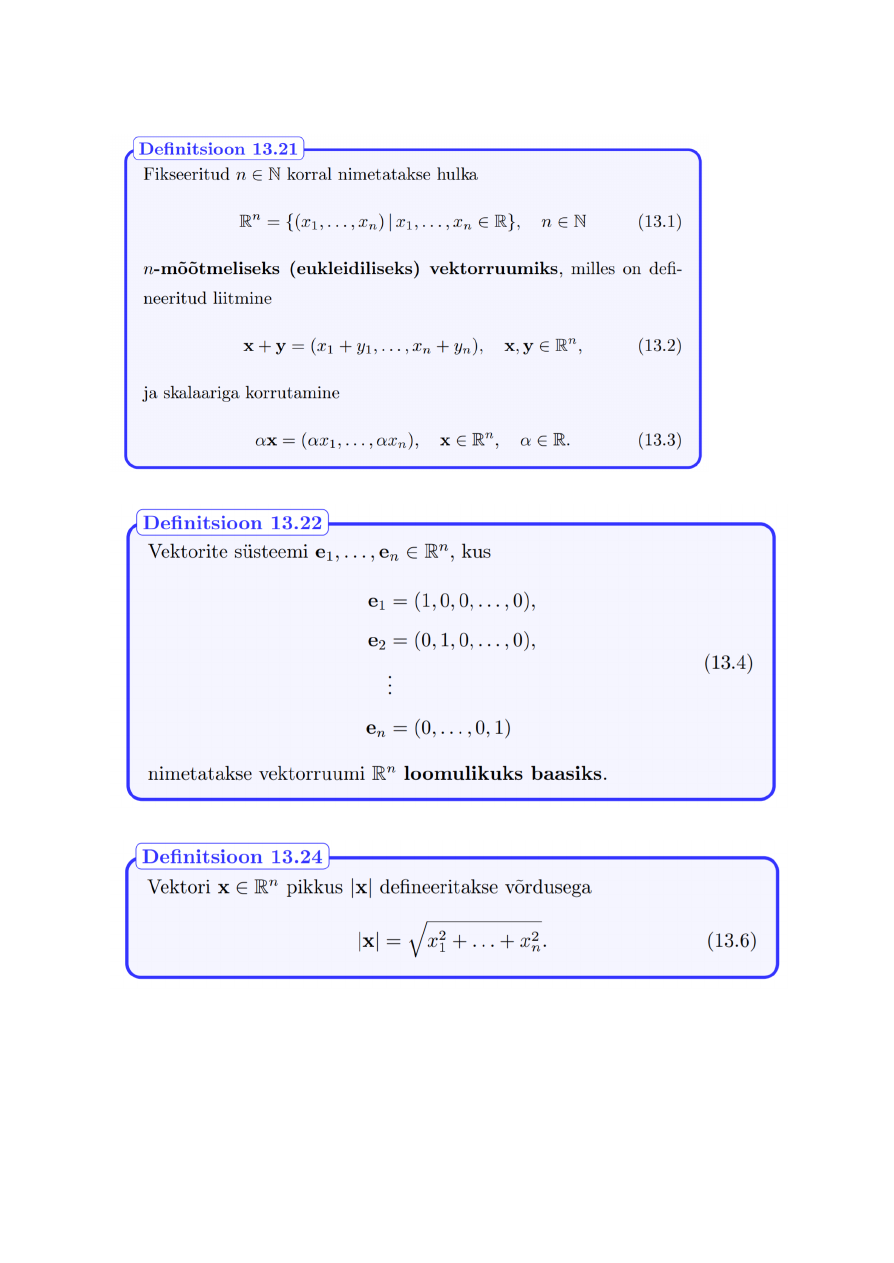
10) Definitsioon 13.21:
𝑛
-mõõtmeline eukleidiline vektorruum ℝ𝑛
11) Definitsioon 13.22: ruumi ℝ
𝑛
loomulik baas
12) Definitsioon 13.24: vektori pikkus ruumis ℝ
𝑛
13) Definitsioon 13.25: vektorite vaheline nurk
Olgu antud nullvektorist erinevad vektorid x, y ∈ E. Võtame vektori x kui vabavektori ühe
esindaja AB, samuti vabavektori y esindaja AC. Vektorite x ja y vaheliseks nurgaks
nimetatakse nurka, mis tekib lõigu AB pööramisel lühemat teed pidi lõiguga AC samasse
suunda. Seda nurka tähistame ∠(x, y) ∈ [0, π].
17) Omadus 13.8: skalaarkorrutise tehetega seotud omadused
18) Omadus 13.9: ortogonaalsed vektorid (risti)
Kaks vektorit a ja b on risti ehk ortogonaalsed parajasti siis, kui
= 0.
23) Omadus 13.14: vektorkorrutise tehetega seotud omadused (antikommutatiivsus,
distributiivsus, skalaariga korrutamine)
Vektorkorrutisel on järgmised tehetega seotud omadused:
1. vektorkorrutis on antikommutatiivne: a × b = −b × a,
2. distributiivsus: a × (b+c) = a × b + a × c,
3. skalaariga korrutamine: (λa) × b = a × (λb) = λ(a × b).
14.peatükk
1) Definitsioon 14.1: tasandi riht, rihivektorid
Tasandit määravat mittekollineaarset vektorite süsteemi nimetatakse tasandi rihiks ning neid
vektoreid nimetatakse rihivektoriteks
2) Definitsioon 14.2: tasandi parameetriline vektorvõrrand
AX = t1u + t2v
kus t1 ja t2 ∈ R
t1 ja t2 on võrrandi parameetrid
3) Definitsioon 14.3: tasandi parameetriline vektorvõrrand kohavektorite kaudu
OX = OA + t1u + t2v
kus t1 ja t2 ∈ R
ehk pmst kohavektor + parameetriline vektorvõrrand
4) Definitsioon 14.4: tasandi parameetrilised võrrandid koordinaatides
x = a1 + t1u1 + t2v1
y = a2 + t1u2 + t2v2
z = a3 + t1u3 + t2v3
kus t1 ja t2 ∈ R
8) Definitsioon 14.6: sirge parameetriline vektorvõrrand
AX = ts
kus t ∈ R ja s on sihivektor
9) Definitsioon 14.7: sirge parameetriline vektorvõrrand kohavektori abil
OX = OA + ts
kus t ∈ R ja s on sihivektor
10) Definitsioon 14.8: sirge parameetrilised võrrandid koordinaatides
x = a1 + ts1
y = a2 + ts2
z = a3 + ts3
kus t ∈ R ning OA = (a1 , a2 , a3) ja s = (s1 , s2 , s3)































































Kõik kommentaarid