MTMM.00.340
Kõrgem
matemaatika 1
2016 KÄRBITUD
loengukonspekt
Marek
Kolk ii
Sisukord
0
Tähistused.
Reaalarvud 1
0.1
Tähistused
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
0.2
Kreeka tähestik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
0.3
Reaalarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
0.4
Summa sümbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1
Maatriksid ja
determinandid 7
1.1
Maatriksi mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.2
Tehted maatriksitega . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.3
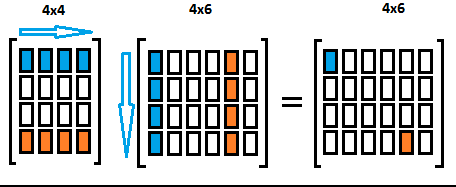
Maatriksite korrutamine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4
Teist ja kolmandat järku
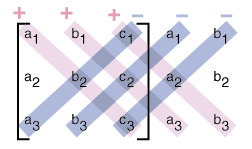
determinant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.5
Kõrgemat järku determinant
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.6
Determinantide omadused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2
Pöördmaatriks. Lineaarvõrrandisüsteemid
15
2.1
Maatriksi pöördmaatriks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2
Maatriksvõrrandite lahendamisest . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3
Pöördmaatriksi leidmine valemi abil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4
Maatriksi
astak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5
Lineaarvõrrandisüsteemid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.6
Cramer ’i peajuht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.7
Gauss ’i elimineerimise meetod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.8
Süsteemi üldlahend ja
erilahend . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.9
Homogeenne lineaarvõrrandisüsteem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3
Funktsioonid ja
jadad 25
3.1
Funktsiooni mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2
Üksühesus ja pealekujutus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3
Liitfunktsioon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4
Pöördfunktsioon
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5
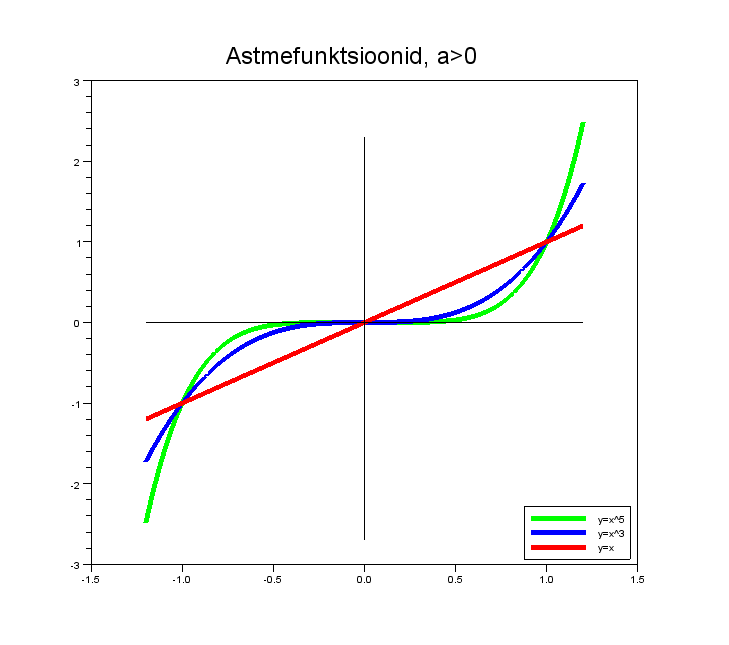
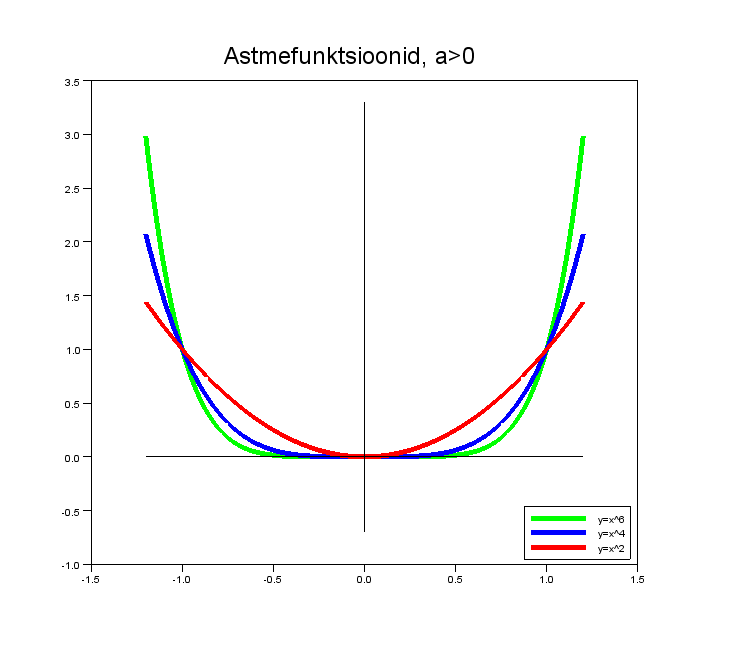
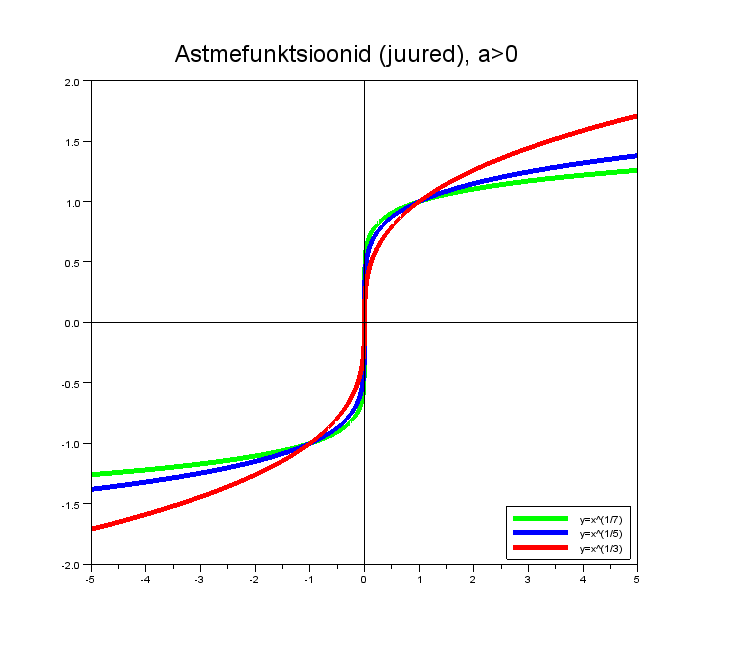
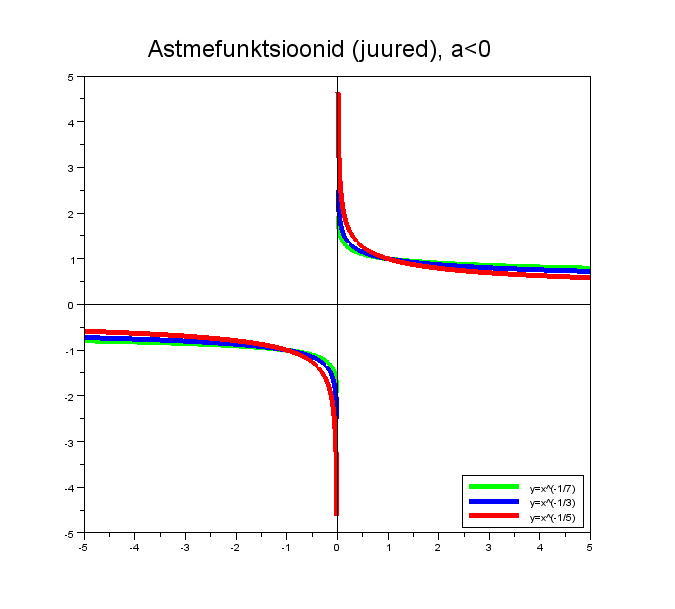
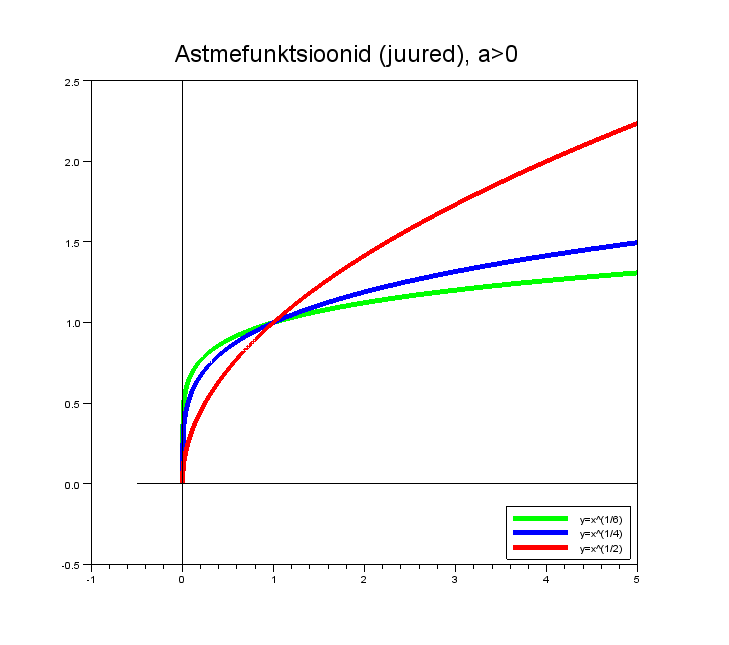
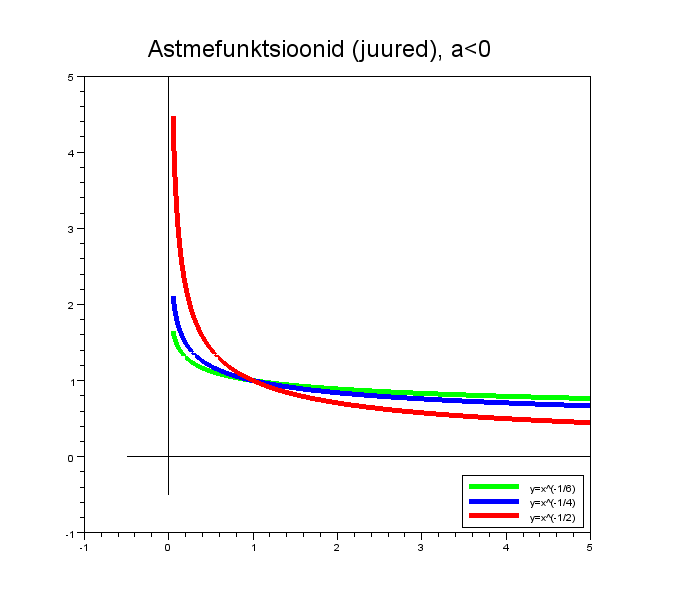
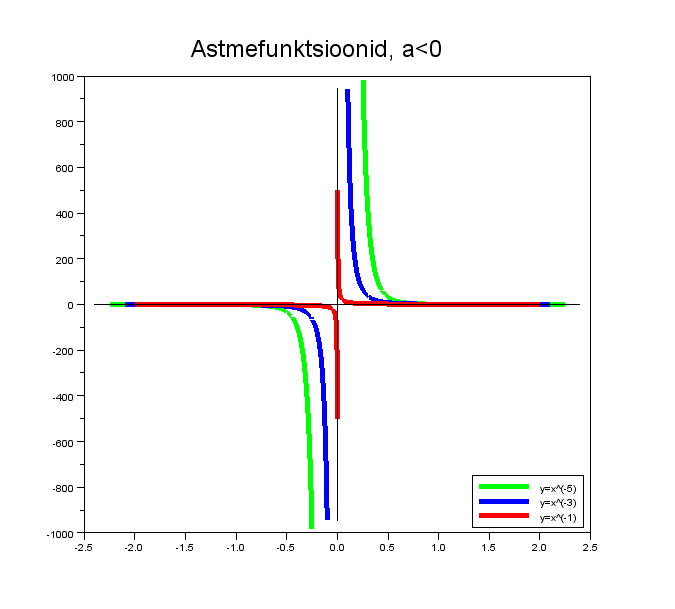
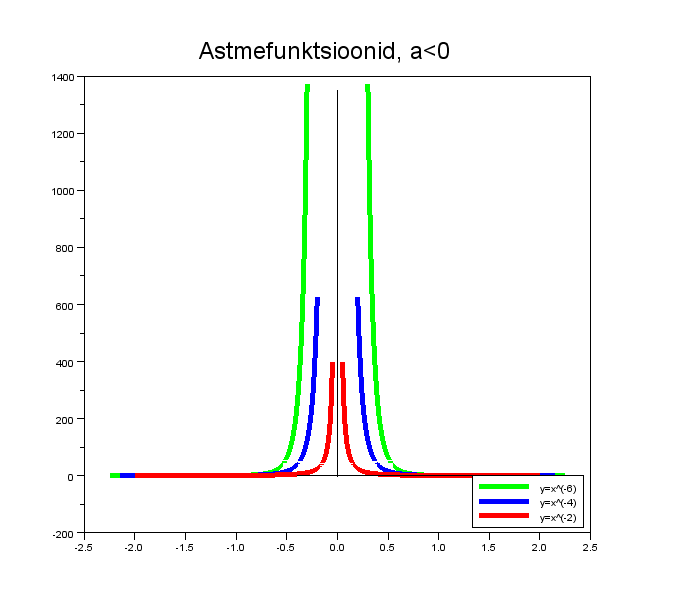
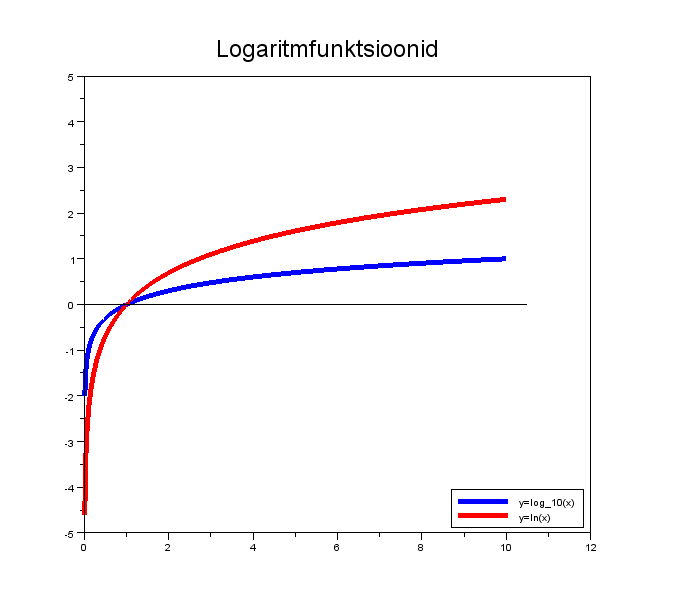
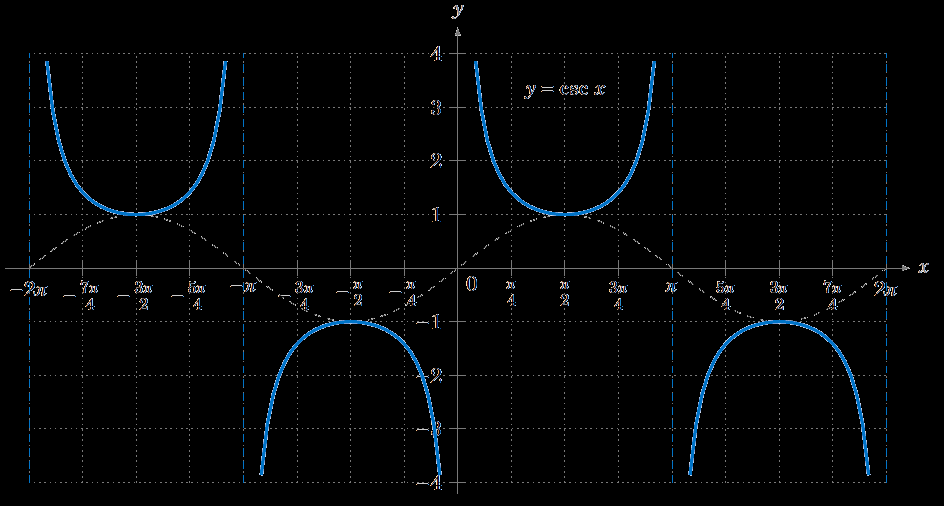
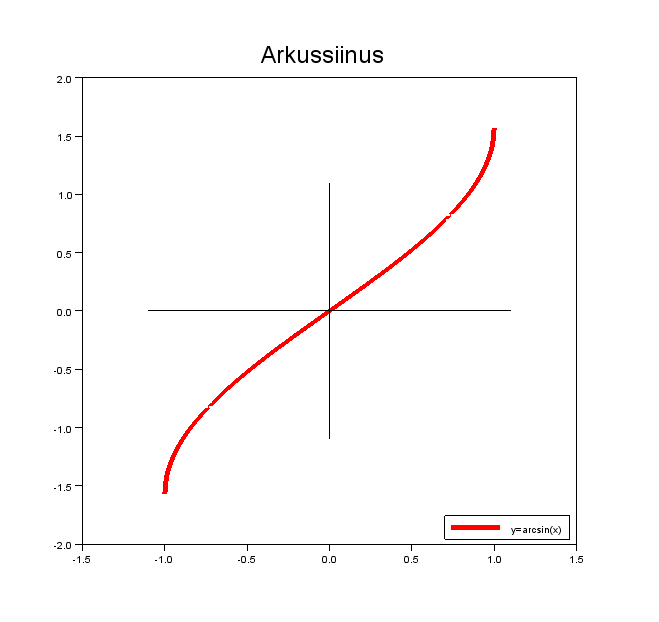
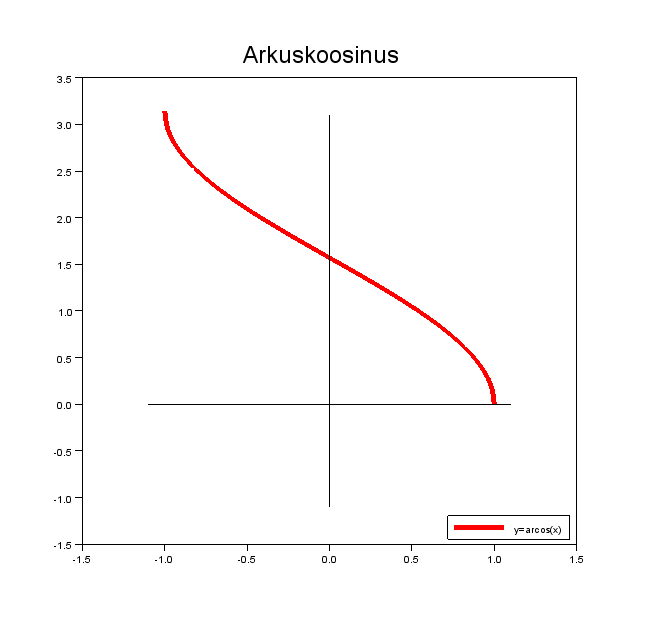
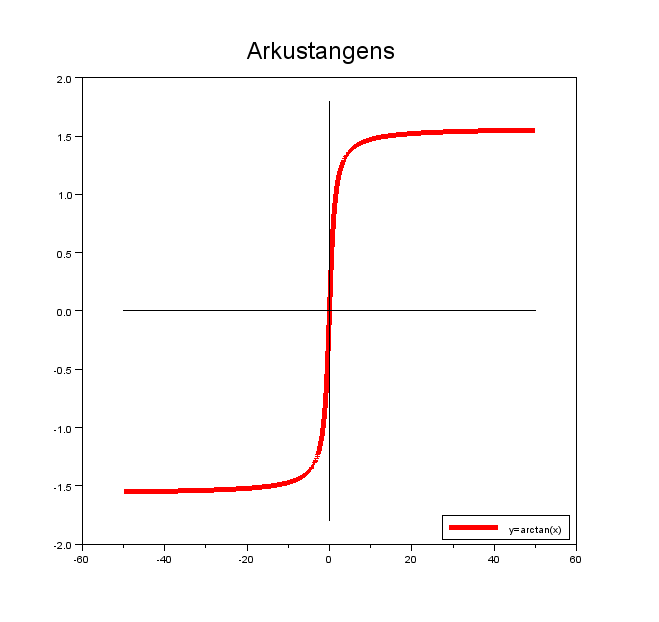
Põhilised elementaarfunktsioonid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
SISUKORD
3.6
Elementaarfunktsioonid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.7
Jadad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4
Funktsiooni piirväärtus ja pidevus
37
4.1
Jada piirväärtus
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2
Funktsiooni piirväärtuse mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3
Ühepoolsed piirväärtused
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.4
Funktsiooni piirväärtuse omadused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.5
Tähtsad piirväärtused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.6
Pidevad funktsioonid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.7
Funktsiooni katkevusviise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.8
Pidevate funktsioonide omadused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5
Funktsiooni
tuletis ja
diferentsiaal 47
5.1
Keskmine kiirus ja
hetkkiirus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.2
Tuletise definitsioon
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.3
Põhiliste elementaarfunktsioonide
tuletised . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.4
Diferentseerimise reeglid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.5
Liitfunktsiooni tuletis
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.6
Nähtuskäigu kiirus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.7
Kõrgemat järku tuletis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.8
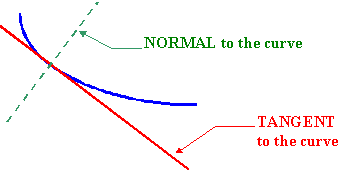
Joone
puutuja ja
normaali võrrandid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
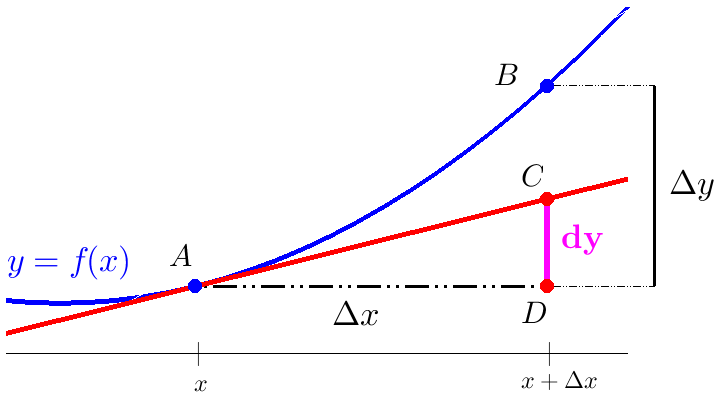
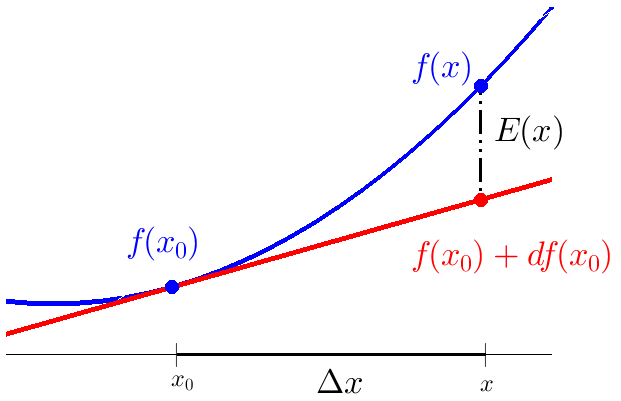
5.9
Funktsiooni diferentsiaal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6
Funktsiooni
uurimine 59
6.1
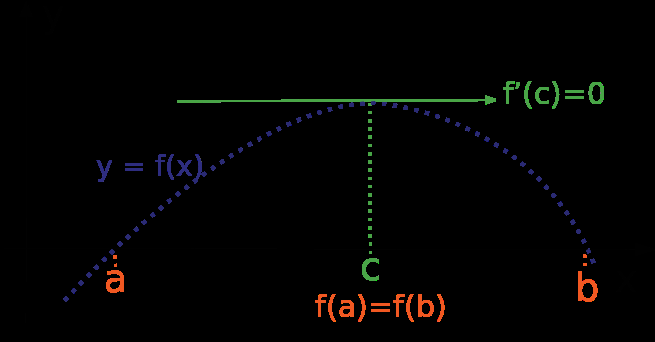
Diferentsiaalarvutuse keskväärtusteoreemid . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.2
L’
Hospital ’i reegel piirväärtuse arvutamiseks . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.3
Funktsiooni kasvamine ja kahanemine
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.4
Funktsiooni
ekstreemumid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.5
Funktsiooni
kumerus ja nõgusus
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.6
Funktsiooni graafiku joonestamine * . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
7
Algfunktsioon ja määramata
integraal 69
7.1
Sissejuhatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.2
Algfunktsioon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.3
Määramata integraal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.4
Integraal põhilistest elementaarfunktsioonidest
. . . . . . . . . . . . . . . . . . . . . . . . . 71
7.5
Tehetega seotud integreerimisreeglid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7.6
Muutuja vahetamine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7.7
Ositi integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.8
Ratsionaalfunktsioonide integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
iv
0.0. Sisukord
8
Diferentsiaalvõrrandid
77
8.1
Sissejuhatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
8.2
Diferentsiaalvõrranditest üldiselt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
8.3
Esimest järku diferentsiaalvõrrandid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
8.4
Eralduvate muutujatega diferentsiaalvõrrandid
. . . . . . . . . . . . . . . . . . . . . . . . . 79
8.5
Esimest järku
lineaarsed diferentsiaalvõrrandid . . . . . . . . . . . . . . . . . . . . . . . . . 81
9
Pindala ja
Riemann ’i integraal
83
9.1
Pindala leidmine lõplike summade abil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
9.2
Riemann’i
summad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
9.3
Määratud (Riemann’i) integraal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9.4
Määratud integraali omadused
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
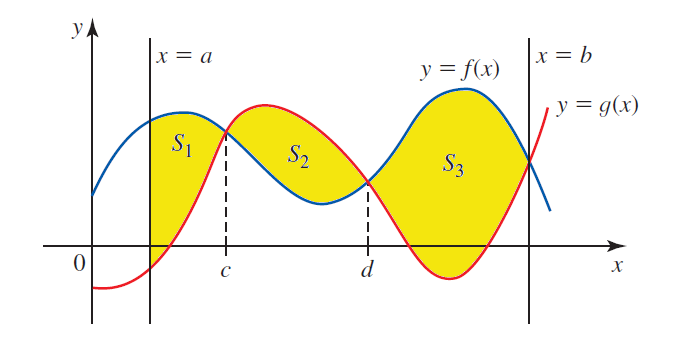
9.5
Kõvertrapetsi pindala
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
9.6
Numbriline integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
10 Määratud integraal
93
10.1
Newton ’i-
Leibniz ’i valem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
10.2 Integraalarvutuse keskväärtusteoreem
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
10.3 Määratud integraal ülemise raja
funktsioonina . . . . . . . . . . . . . . . . . . . . . . . . . 96
11 Määratud integraali rakendusi
99
11.1 Pindala parameetriliste võrrandite korral * . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
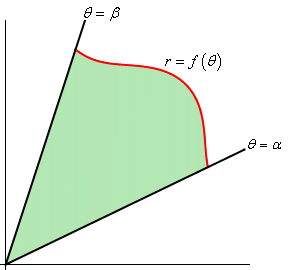
11.2 Kõversektori pindala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
11.3 Joone kaare pikkuse arvutamine
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
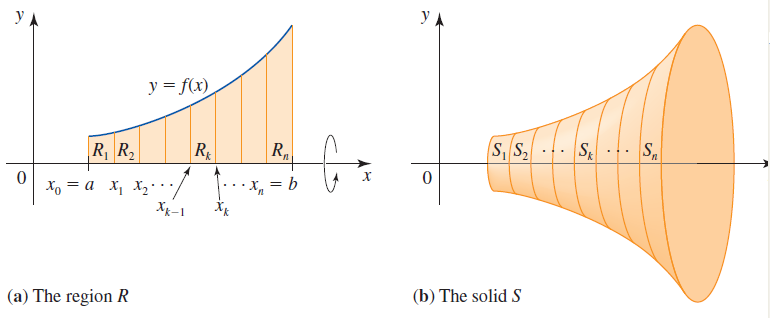
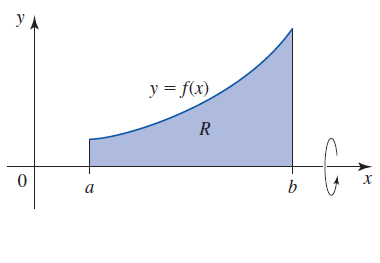
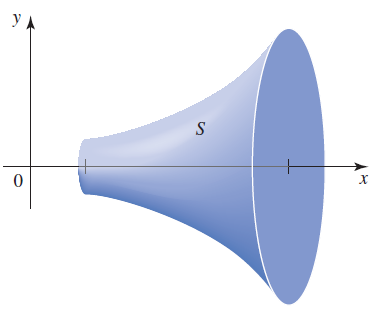
11.4 Keha ruumala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
11.5 Integraali füüsikalisi rakendusi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
12 Päratud
integraalid ja nende
rakendused 105
12.1 Päratud integraalid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
12.2 Lõpmatute rajadega integraalid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
12.3 Integraal tõkestamata funktsioonist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
12.4
Integraalide rakendusi statistikas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
12.5
Euler ’i integraalid *
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
12.6 Irratsionaalfunktsioonide integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
12.7 Trigonomeetriliste funktsioonide integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . 111
13
Vektorid ruumis
113
13.1 Suunatud lõikude hulk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
13.2 Vabavektorid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
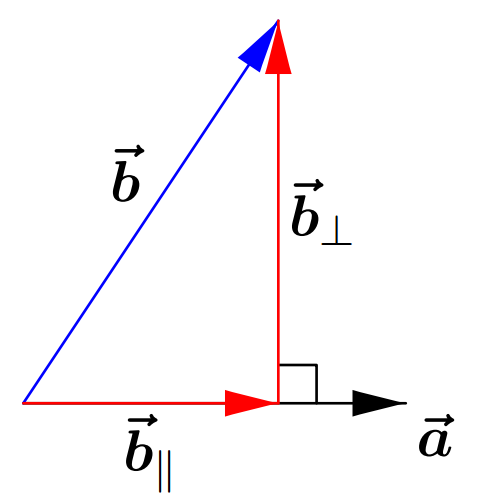
13.3
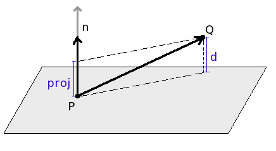
Projektsioonivektor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
13.4 Kohavektorid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
v
SISUKORD
13.5 Eukleidiline vektorruum
n
R
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
13.6 Skalaarkorrutamine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
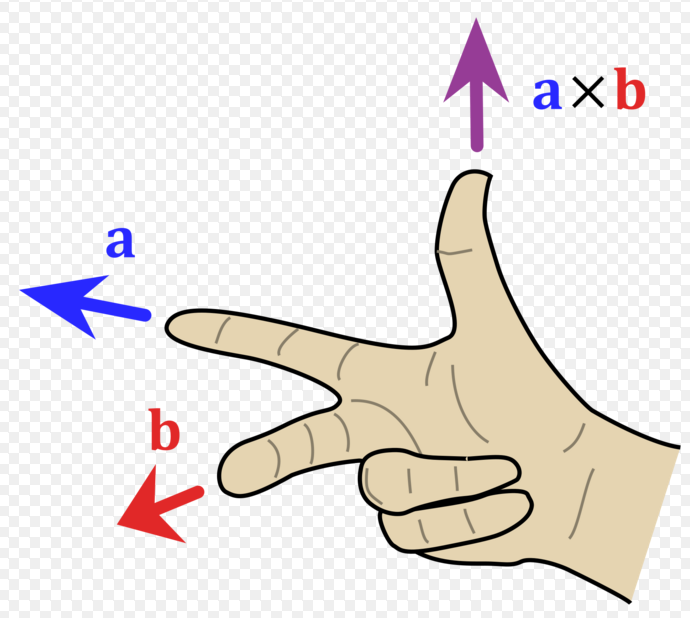
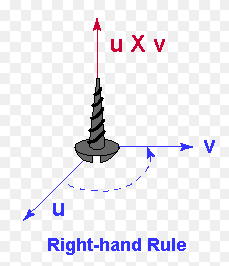
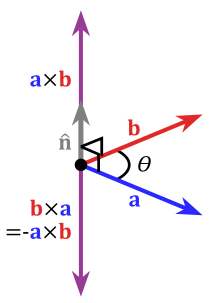
13.7 Vektorkorrutamine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
13.8 Segakorrutamine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
14 Sirge ja tasand ruumis
127
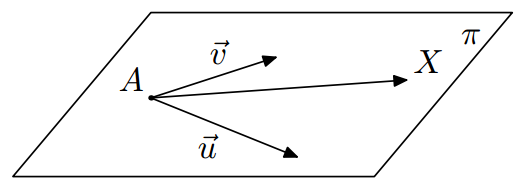
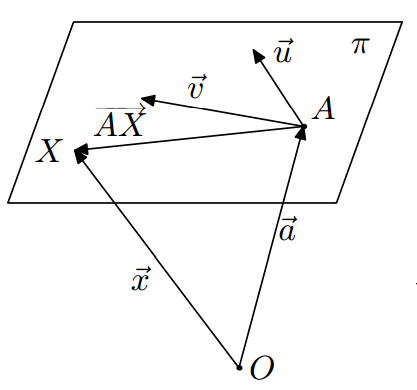
14.1 Tasandi vektorvõrrandid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
14.2 Tasandi üldvõrrand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
14.3 Sirge vektorvõrrandid
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
14.4 Sirge võrrandid ruumis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
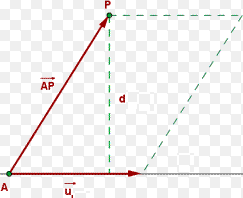
14.5 Punkti kaugus sirgeni
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
14.6 Punkti kaugus tasandini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
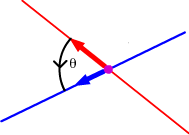
14.7 Nurk kahe sirge vahel
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
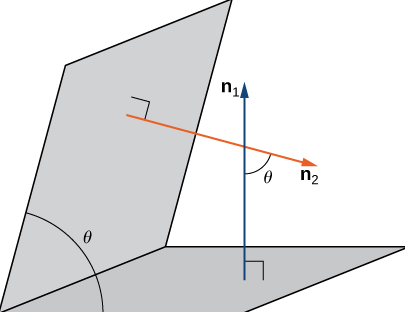
14.8 Nurk kahe tasandi vahel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
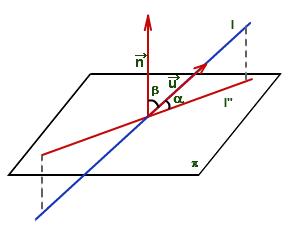
14.9 Nurk sirge ja tasandi vahel
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
15
Kompleksarvud . Algebraline ja
trigonomeetriline kuju
137
15.1 Sissejuhatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
15.2 Kompleksarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
15.3 Kompleksarvu algebraline kuju . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
15.4 Tehted kompleksarvudega . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
15.5 Kompleksarvu trigonomeetriline kuju . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
15.6
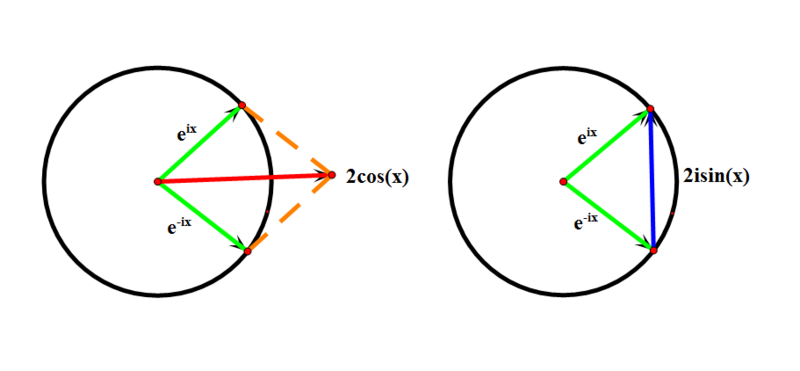
Siinus ja
koosinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
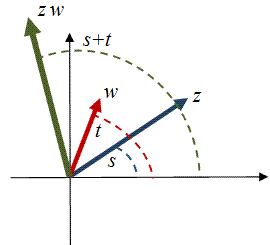
15.7 Tehted trigonomeetrilisel kujul antud kompleksarvudega . . . . . . . . . . . . . . . . . . . . 142
16 Kompleksarvu juured.
Eksponentkuju 145
16.1 Kompleksarvu n-astme juured . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
16.2 Kompleksarvu eksponentkuju . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
16.3 Algebraliste võrrandite lahendamisest
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
vi
Peatükk 0
Tähistused. Reaalarvud
0.1
Tähistused
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
0.2
Kreeka tähestik
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
0.3
Reaalarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
0.4
Summa sümbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
Kontrolltöö teemad
1.
Reaalarvu absoluutväärtus ja selle omadused (enamus neist on loogiliselt tuletatavad).
2. Summa sümbol.
Eksamiteemad
1.
Naturaalarvud .
2. Täisarvud.
3.
Ratsionaalarvud .
4.
Irratsionaalarvud .
5. Reaalarvud.
6. Summa sümbol.
PEATÜKK 0. TÄHISTUSED. REAALARVUD
0.1
Tähistused
definitsioon (võrdub, rõhutatult)
a ∈ X
element a kuulub hulka X
a /
∈ X
a ei kuulu hulka X
X ⊂ Y
hulk X sisaldub hulgas Y (NB! mitterange
kuulumine )
mujal võidakse eristada ⊂ ja ⊆, meil ⊂=⊆
A ∪ B
hulkade ühend
A∩ B
hulkade ühisosa
X \ Y
hulgast X lahutatakse hulk Y
⇒
järeldub
⇔
on samaväärne (mõlematpidi järeldumine)
∀x
kehtib iga x korral
∃x
leidub selline x
N
naturaalarvud 1, 2, 3, . . .
N0
naturaalarvud koos nulliga 0, 1, 2, 3, . . .
Z
täisarvud . . . , −2, −1, 0, 1, 2, . . .
Q
ratsionaalarvud p, q = 0
q
I
irratsionaalarvud
R
reaalarvud
C
kompleksarvud
n!
faktoriaal 1 · 2 · · · n
2
0.2.
0.2
Kreeka tähestik
alfa
beeta
γ, Γ
gamma
δ, ∆
delta , ε
epsilon ζ
dzeeta
eeta
θ, Θ
teeta i
ioota
kapa
λ, Λ
lambda µ
müü
ν
nüü
ξ, Ξ
ksii o
omikron
π, Π
pii
ρ ,
roo
σ, Σ
sigma τ
tau
υ, Υ
üpsilon
φ, ϕ, Φ fii
hii
ψ, Ψ
psii ω, Ω
oomega
3
PEATÜKK 0. TÄHISTUSED. REAALARVUD
0.3
Reaalarvud
Definitsioon 0.1
Tähistame sümboliga N kõigi naturaalarvude hulka,
N = {1, 2, 3, . . . }
ja sümboliga Z kõigi täisarvude hulka
Z = {. . . , −3, −2, −1, 0, 1, 2, 3, . . . }.
Definitsioon 0.2
Ratsionaalarvudeks nimetatakse arve kujul p , kus p ja q on täisarvud
q
ja q = 0. Kõigi ratsionaalarvude hulga tähistame sümboliga Q.
Definitsioon 0.3
Arve, mis on esitatavad lõpmatute mitteperioodiliste kümnend-
murdudena, nimetatakse irratsionaalarvudeks. Irratsionaalarvude
hulga tähistame sümboliga I.
Definitsioon 0.4
Kõik ratsionaal- ja irratsionaalarvud moodustavad
reaalarvude hulga.
Kõigi reaalarvude hulga tähistame sümboliga R.
Reaalarvude hulga kirjapanekuks kasutatakse kirjutusviisi
R = { x : −∞ N korral kehtib
xn > τ
( või xn 0 korral leidub selline jada indeks
N , et iga suurema indeksi n > N korral kehtib |xn| 0 korral leidub selline jada indeks
N , et iga suurema indeksi n > N korral kehtib
|xn − L| 0, et jada kõik elemendid on absoluutväärtuse poolest väik-
semad kui arv M , s.t.
|xn| 0 korral.
lim f (x) = L.
x→a
Punktis x = a võib olla funkt-
sioon määratud, kuid võib ka
mitte olla. Piirväärtuse jaoks ei
ole funktsiooni käitumine
punk -
4.3
Ühepoolsed piirväärtused
tis x = a üldsegi oluline.
Definitsioon 4.10
Öeldakse, et funktsioonil f on lõpmatu piirväärtus protsessis x → a,
kui argumendi x (tõkestamatu) lähenemine arvule a toob kaasa funkt-
siooni f väärtuste f (x) tõkestamatu
kasvamise . Sel juhul kirjutame
lim f (x) = ∞
(või siis lim f (x) = −∞).
x→a
x→a
Vaatleme piirprotsesse:
1. x → a, x > a, lähenemine paremalt, s.o. parempoolne piirväär-
tus. Tähistame
lim f (x)
või
f (a+).
x→a+
2. x → a, x 0, nii et |f (x)| ≤ M iga x ∈ X korral.
Teoreem 4.3
Kui funktsioon y = f (x) on tõkestatud punkti a mingis ümbruses ja
lim g(x) = 0,
x→a
siis
lim [f (x) · g(x)] = 0.
(4.1)
x→a
Teoreem 4.4
Kui leiduvad lõplikud piirväärtused
lim f (x) = A
ja
lim g(x) = B,
(4.2)
x→a
x→a
siis kehtivad järgmised tehetega seotud omadused:
1. lim [f (x) ± g(x)] = A ± B;
x→a
2. lim [c · f (x)] = c · A,
c ∈ R;
x→a
3. lim [f (x) · g(x)] = A · B;
x→a
f (x)
A
4. lim
B = 0.
x→a g(x)
B
Märkus 4.4
Teoreemi 4 nõue, et peavad leiduma lõplikud piirväärtused lim f (x) ja
lim g(x), on olulised. Vastasel juhul näiteks f (x) = 1 − 1 ja g(x) = 1
|x|
|x|
korral
1
1
lim (f (x) + g(x)) = lim
1 −
= lim 1 = 1,
x→0
x→0
|x|
|x|
x→0
aga kasutades valesti teoreemi 4 esimest omadust, saaksime
1
1
lim (f (x) + g(x))
→
lim
1 −
+ lim
= −∞ + ∞.
x→0
x→0
|x|
x→0 |x|
EI KEHTI
Suurus ∞ − ∞ on täiesti määramata suurus (üks määramatus
miinus mingi teine määramatus),
kusjuures ∞ − ∞ ei võrdu nulliga!!!
41
PEATÜKK 4. FUNKTSIOONI PIIRVÄÄRTUS JA PIDEVUS
Teoreem 4.5
Keskmise
muutuja omadus. Kui punkti a mingis ümbruses keh-
tivad võrratused
f (x) ≤ g(x) ≤ h(x),
∀x ∈ (a − δ, a) ∪ (a, a + δ),
ja leiduvad lõplikud piirväärtused
lim f (x) = lim h(x) = A,
x→a
x→a
siis leidub ka piirväärtus lim g(x) ning
x→a
lim g(x) = A.
x→a
Teoreem 4.6
Piirväärtus elementaarfunktsioonidest. Kui f on
elementaar -
funktsioon ja punkt a kuulub tema määramispiirkonda, a ∈ X, siis
lim f (x) = f (a).
x→a
42
4.5. Tähtsad piirväärtused
4.5
Tähtsad piirväärtused
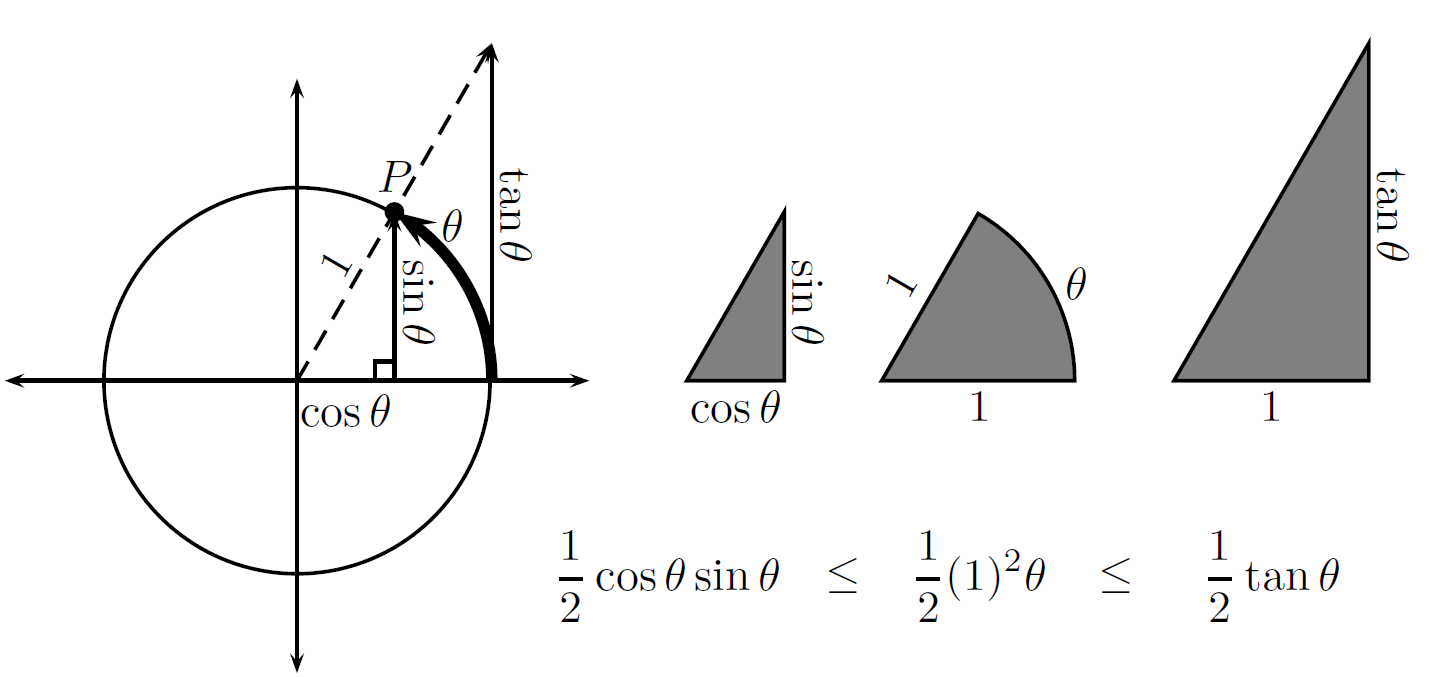
Teoreem 4.7
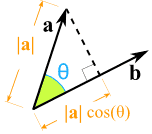
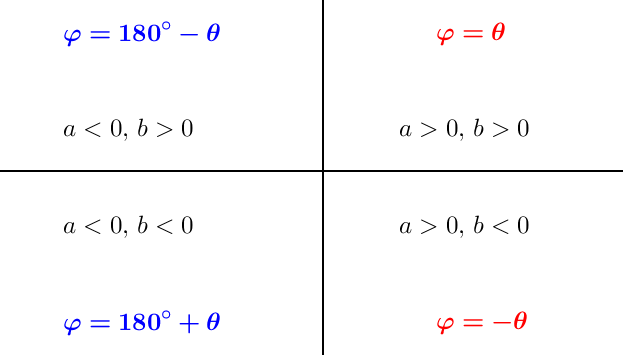
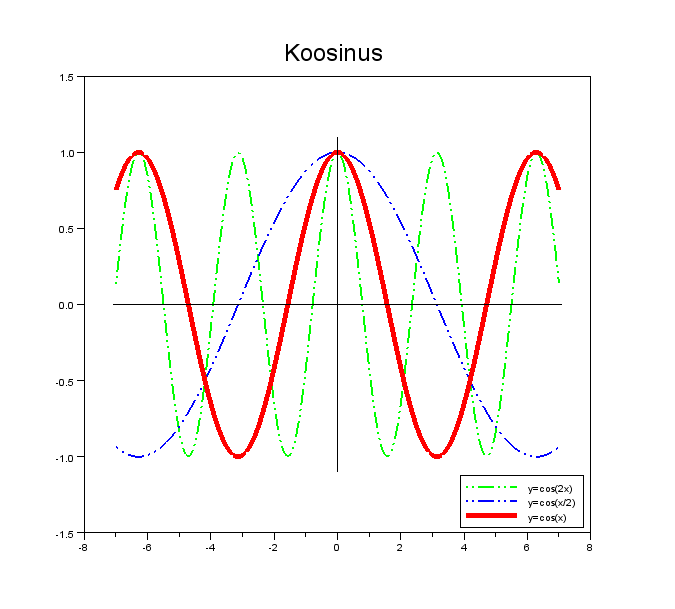
Olgu θ nurk radiaanides. Siis kehtib valem
sin θ
lim
= 1.
(4.3)
θ→0
Allikas: Wikipedia
Tõestus. Tõestuse leiab näiteks õpikutest [3, 22]. Vaatleme funktsiooni
f (θ) = sin θ . Punkt θ = 0 ei kuulu funktsiooni f määramispiirkonda, kuid
mujal on f määratud.
Tuletame meelde, et radiaan on
kesknurk , mis
toetub raadiuse
pikkusele kaarele
sin θ
Funktsioon f on
paarisfunktsioon ja
piisab näidata, et lim
= 1.
θ→0+
◦
1 rad ≈ 57 17 .
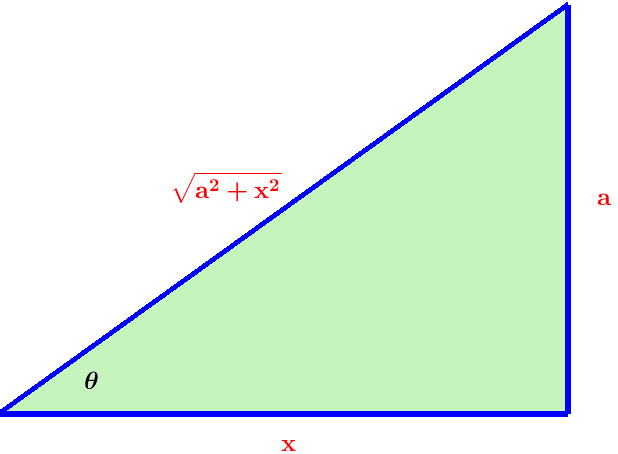
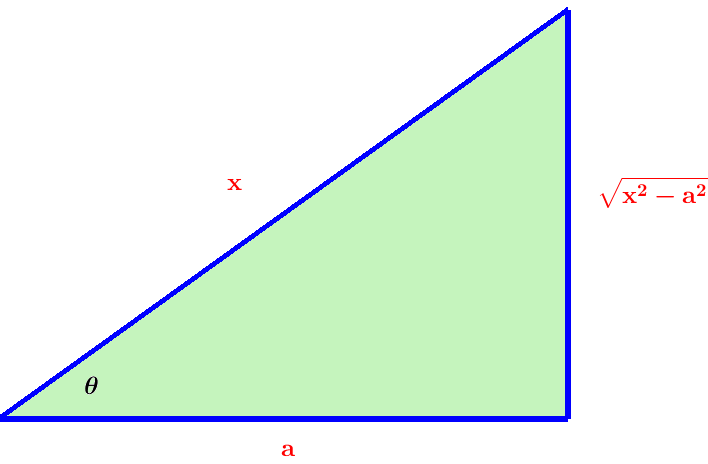
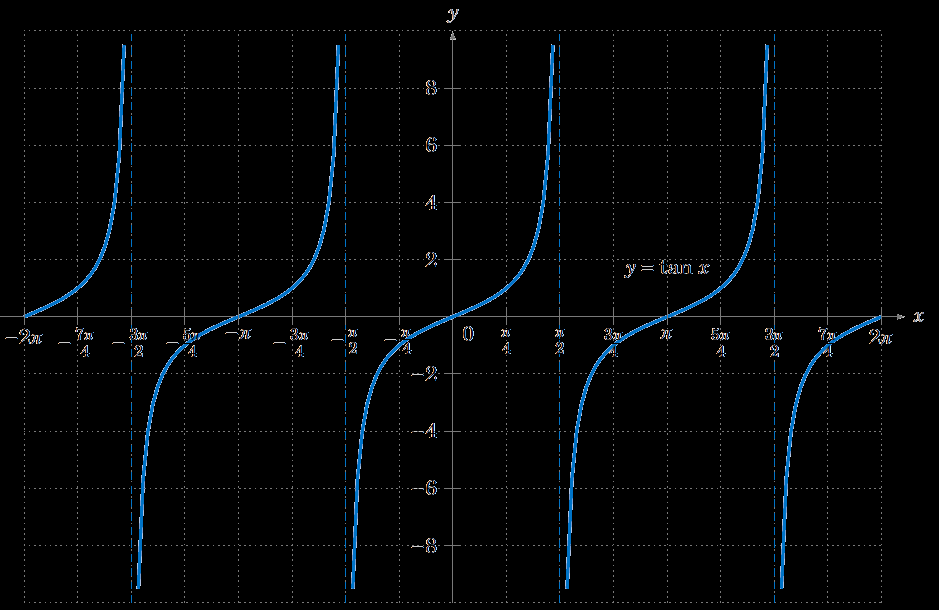
Vaatleme ringjoont
raadiusega 1. Asetame I veerandisse ringjoonele punkti
P . Me moodustame täisnurkse kolmnurga, mille hüpotenuusi pikkus on 1,
ringi sektori kuni punktini P (kaare pikkusega θ radiaani) ja täisnurkse
kolmnurga külje pikkustega 1 ja tan θ (vt. joonist).
Allikas: [3]
Ühikringi pindala on π ja ümbermõõt 2π, millest pindala avaldub poole
ümbermõõduga. Sama suhe jääb kehtima, kui võtame ringist mingi väik-
sema osa. Siit saame, et loodud sektori pindala on θ . Jooniselt on selge,
2
et moodustatud
kujundite pindalade kohta kehtivad võrratused
cos θ sin θ
1
tan θ
sin θ
≤
θ ≤
ehk
cos θ sin θ ≤ θ ≤
2
2
2
cos θ
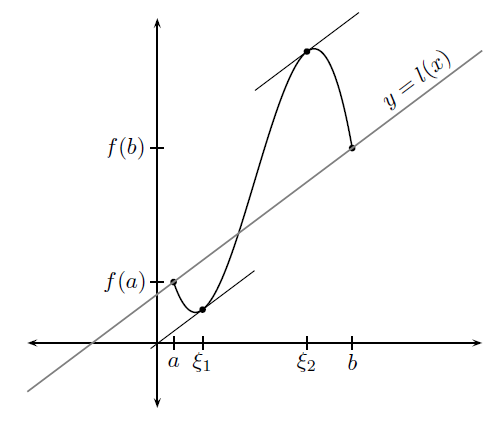
Kuna 0 0, selline arv ξ ∈ (a, a + δ), et
f (a + δ) − f (a)
f (ξ)
g(a + δ) − g(a)
g (ξ)
Kui f (a) = g(a) = 0, siis jääb järgi võrdus
f (a + δ)
f (ξ)
g(a + δ)
g (ξ)
ja siit edasi järgneb analüüs minnes piirile δ → 0+.
L’Hospital’i reegel f (a) = g(a) = 0 korral. Allikas: [13]
62
6.4. L’Hospital’i reegel piirväärtuse arvutamiseks
Märkus 6.3
Siinjuures on oluline kontrollida, et meil oleks määramatus tüüpi 0 või
0
∞ , vastasel korral võime saada absurdse tulemuse. Näiteks, kasutades
∞
valesti l’Hospital’i reeglit saame
1 ups!
0 ups!
0
lim
= lim
= lim
= 0.
x→0 x2
x→0 2x
x→0 2
Tegelik vastus peab olema aga pluss lõpmatus.
63
PEATÜKK 6. FUNKTSIOONI UURIMINE
6.3
Funktsiooni kasvamine ja kahanemine
Teoreem 6.6
Olgu funktsioon f
diferentseeruv vahemikus (a, b). Kui f (x) > 0 iga
argumendi x ∈ (a, b) korral, siis funktsioon f kasvab selles vahemikus
ja kui f (x) 0
iga x ∈ (a, b) korral. Valime suvalised punktid x1, x2 ∈ (a, b) nii, et
x1 0, siis
f (x2) − f (x1) > 0 ⇒ f(x2) − f(x1) > 0,
x2 − x1
mis ütlebki, et f (x2) > f (x1), s.t. funktsioon f on kasvav antud piirkonnas.
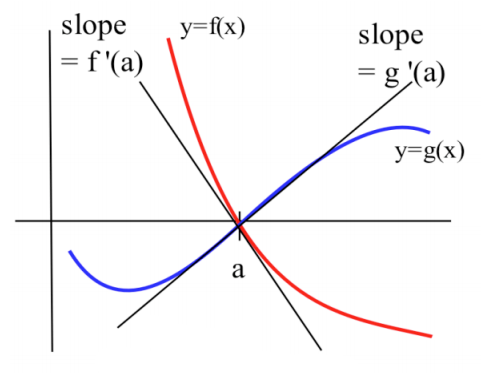
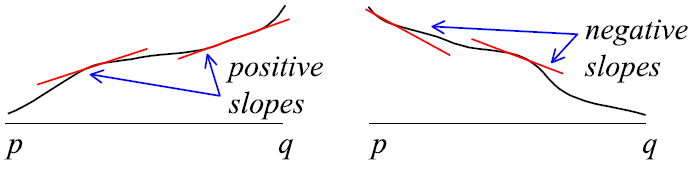
Märkus 6.4
Geomeetriliselt tähendab tingimus f (x) > 0 (funktsioon kasvab) seda,
et joone y = f (x) puutuja moodustab x-telje positiivse suunaga iga x ∈
(a, b) korral
teravnurga ja tingimus f (x) 0, nii et
f (x) ≤ f (a),
iga x ∈ (a − δ, a + δ) korral .
64
6.4. Funktsiooni ekstreemumid
Definitsioon 6.3
Öeldakse, et funktsioonil f on punktis a
lokaalne miinimum, kui
leidub selle punkti ümbrus (a − δ, a + δ), δ > 0, nii et
f (x) ≥ f (a),
iga x ∈ (a − δ, a + δ) korral .
Märkus 6.5
Diferentseeruva funktsiooni lokaalse ekstreemumi (maksimum või mii-
nimum) leidumiseks punktis a on
Fermat ’ teoreemi põhjal tarvilik, et
f (a) = 0. Kui funktsioon ei ole diferentseeruv (kuid on siiski mää-
ratud), siis sellises punktis võib samuti lokaalne
ekstreemum leiduda
(näiteks y = |x| korral on x = 0 miinimumpunkt).
Definitsioon 6.4
Määramispiirkonna punkte, kus f (x) = 0 ja punkte, kus funktsioon f
ei ole diferentseeruv, nimetatakse funktsiooni f kriitilisteks punkti-
Joonis: Wikipedia.
deks .
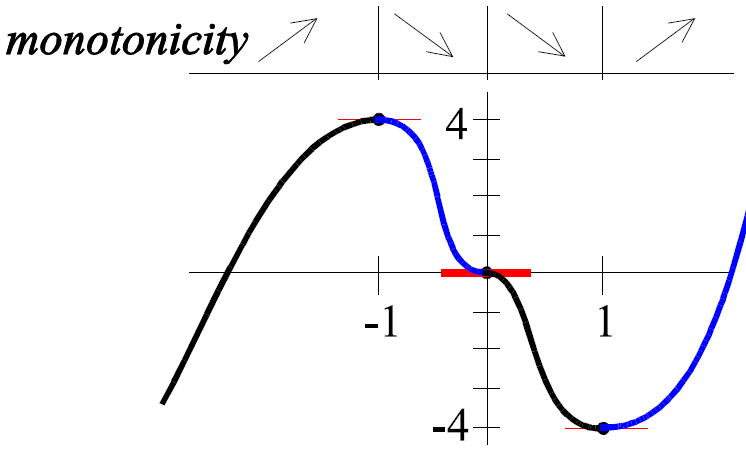
Teoreem 6.7
Olgu funktsioon f pidev
kriitilises punktis a. Siis kehtivad väited:
1. Kui punkti a läbimisel (positiivses suunas) f (x) märk muutub
+ → − siis on funktsioonil f punktis a lokaalne maksimum
(funktsiooni kasvamine läheb üle kahanemiseks);
2. Kui punkti a läbimisel f (x) märk muutub
− → + , siis on
funktsioonil f punktis a lokaalne miinimum (funktsiooni kaha-
nemine läheb üle kasvamiseks);
3. Kui punkti a läbimisel f (x) märk ei muutu, siis punktis a ekst-
reemumit ei ole.
Allika: [19]
65
PEATÜKK 6. FUNKTSIOONI UURIMINE
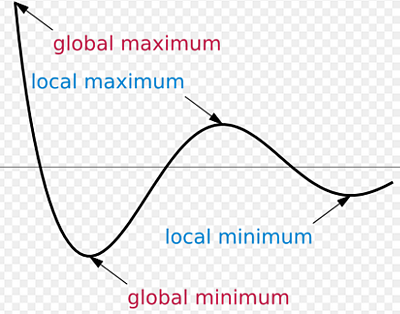
Märkus 6.6
Peale lokaalsete
ekstreemumite eristame veel globaalseid ekstreemu-
me (funktsiooni suurim või väikseim väärtus vaadeldavas piirkonnas).
Viimaste leidmiseks tuleb leida kõik
lokaalsed ekstreemumid, kusjuu-
res eraldi tuleb arvutada funktsiooni väärtused piirkonna otspunktides
(kui tegemist on lõiguga) ning katkevuspunktides. Saadud suurim või
väikseim väärtus ongi funktsiooni
globaalseks ekstreemumiks. Kui ei
ole eraldi rõhutatud, siis mõistame ekstreemumite all kõiki
lokaal -
seid ja globaalseid ekstreemume.
Lause 6.1
Olgu funktsioon kaks korda diferentseeruv punktis x0. Siis funktsioonil
f on argumendi väärtusel x0 maksimum, kui
f (x0) = 0
ja
f (x0) 0.
6.5
Funktsiooni kumerus ja nõgusus
Olgu funktsioon f diferentseeruv vahemikus (a, b). Siis igas punktis P =
(x, f (x)) on
joonel y = f (x) olemas puutuja.
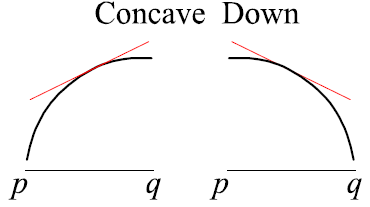
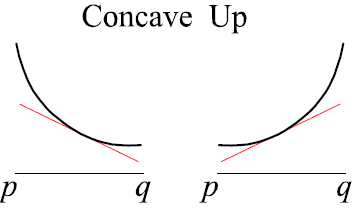
Definitsioon 6.5
Joont y = f (x) nimetatakse
kumeraks vahemikus (a, b), kui selle
joone puutuja on igas punktis P = (x, f (x)), x ∈ (a, b), ülalpool joont.
Joont y = f (x) nimetatakse nõgusaks vahemikus (a, b), kui selle joone
puutuja on igas punktis P = (x, f (x)), x ∈ (a, b), allpool joont.
Joonised: [19]
66
6.6. Funktsiooni ekstreemumid
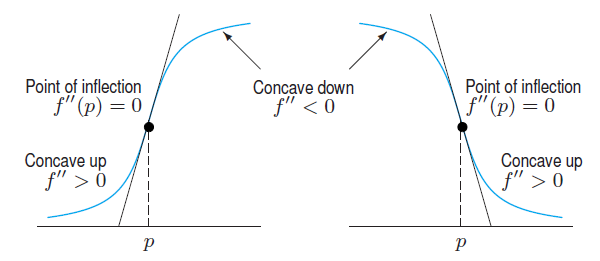
Teoreem 6.8
Olgu funktsioon f kaks korda diferentseeruv vahemikus (a, b). Kui
f (x) 0
iga x ∈ (a, b) korral,
siis on antud joon nõgus selles vahemikus.
Definitsioon 6.6
Olgu antud pidev funktsioon y = f (x). Joone y = f (x) graafiku punk-
ti (c, f (c)), mis eraldab graafiku kumerat osa nõgusast, nimetatakse
selle joone käänupunktiks.
Allikas: [14]
Märkus 6.7
Analoogiliselt võib analüüsida kõiki nelja põhitüüpi: kasvav-kiirendav,
kasvav-aeglustav, kahanev-aeglustav ja kahanev-kiirendav.
Allikas: [3]
6.6
Funktsiooni graafiku joonestamine *
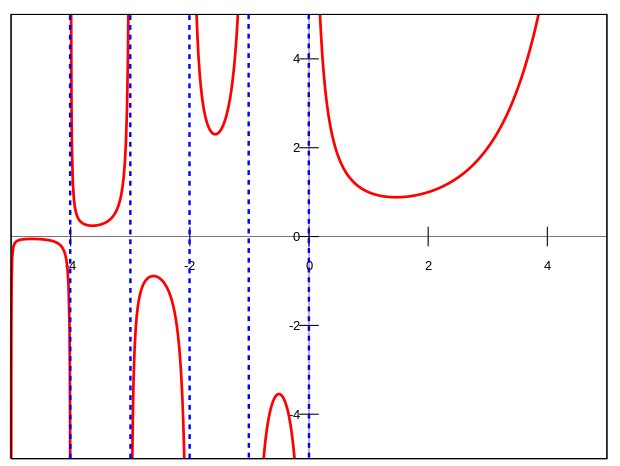
Definitsioon 6.7
Sirget x = a nimetatakse joone y = f (x) püstasümptoodiks, kui
|f (a+)| = ∞ või |f (a−)| = ∞.
67
PEATÜKK 6. FUNKTSIOONI UURIMINE
Definitsioon 6.8
Sirget
y = k x + b
(6.5)
nimetatakse joone y = f (x) parempoolseks (vasakpoolseks) kalda-
sümptoodiks, kui selle sirge ja funktsiooni graafiku vaheline kaugus
läheneb lõpmatus protsessis nullile, s.t.
lim [f (x) − (k x + b)] = 0
lim [f (x) − (k x + b)] = 0
. (6.6)
x→∞
x→−∞
Lihtne on tuletada (tõusunurga tangensist), et kaldasümptoodi tõus k
peab võrduma piirväärtusega
f (x)
f (x)
k = lim
k =
lim
(6.7)
x→∞
x
x→−∞
x
Siinjuures, parempoolse kaldasümtoodi korral kehtib protsess x → ∞
ja vasakpoolse kaldasümptoodi korral protsess x → −∞. Kauguse aval-
disest f (x) − (k x + b) saab avaldada
b = lim [f (x) − k x]
b =
lim [f (x) − k x]
(6.8)
x→∞
x→−∞
Kui k või b tuleb lõpmatus, siis vastav kaldasümptood puudub.
68
Peatükk 7
Algfunktsioon ja määramata integraal
7.1
Sissejuhatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
7.2
Algfunktsioon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
7.3
Määramata integraal
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
7.4
Integraal põhilistest elementaarfunktsioonidest
. . . . . . . . . . . . . . . . .
71
7.5
Tehetega seotud integreerimisreeglid . . . . . . . . . . . . . . . . . . . . . . . .
73
7.6
Muutuja vahetamine
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
7.7
Ositi integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
7.8
Ratsionaalfunktsioonide integreerimine . . . . . . . . . . . . . . . . . . . . . .
75
Kontrolltöö teemad
1. Määramata integraali seos kiirenduse, kiiruse ja teepikkusega.
2. Põhiliste elementaarfunktsioonide algfunktsioonid (kuni trigonomeetriliste funktsioonideni).
3. Muutuja
vahetuse võte määramata integraali leidmisel.
4. Ositi integreerimise reegel ja selle kasutamine.
5. Ratsionaalsete funktsioonide integreerimine lihtsamal juhul.
Eksamiteemad
1. Algfunktsiooni mõiste.
2. Määramata integraali mõiste.
3. Määramata integraali seos kiirenduse, kiiruse ja teepikkusega.
4. Põhiliste elementaarfunktsioonide algfunktsioonid (kuni trigonomeetriliste funktsioonideni).
5. Muutuja vahetuse võte määramata integraali leidmisel.
6. Ositi integreerimise reegel ja selle kasutamine.
7. Ratsionaalsete funktsioonide integreerimine.
PEATÜKK 7. ALGFUNKTSIOON JA MÄÄRAMATA INTEGRAAL
7.1
Sissejuhatus
Kohe me näeme, et kiirenduse või kiiruse teadmisel kehtivad skemaatili-
selt järgmised omadused:
v(t) =
v (t) dt =
a(t) dt,
s(t) =
s (t) dt =
v(t) dt.
7.2
Algfunktsioon
Definitsioon 7.1
Funktsiooni F nimetatakse funktsiooni f algfunktsiooniks vahemi-
kus (a, b), kui
F (x) = f (x)
iga x ∈ (a, b) korral.
Märkus 7.1
Kehtib väide. Funktsiooni f kõik algfunktsioonid F avalduvad kujul
F (x) + C, kus F on funktsiooni f mingi algfunktsioon ja C ∈ R on
suvaline konstant.
7.3
Määramata integraal
Definitsioon 7.2
Funktsiooni f kõikide algfunktsioonide üldavaldist F (x) + C nimeta-
takse funktsiooni f määramata
integraaliks . Siin F on funktsiooni
f mingi algfunktsioon ja C ∈ R on suvaline konstant. Tähistame
f (x) dx = F (x) + C.
(7.1)
Definitsioon 7.3
Funktsiooni määramata integraali
leidmist nimetatakse selle funktsioo-
ni integreerimiseks.
Märkus 7.2
Määramata integraali
definitsioonist järelduvad järgmised seosed:
1.
f (x) dx
= f (x),
2. d
f (x) dx = f (x) · dx,
3.
dF (x) = F (x) + C.
70
7.4. Integraal põhilistest elementaarfunktsioonidest
Märkus 7.3
Seega
diferentseerimine ja integreerimine on teineteise pöördoperat-
sioonid (konstantse liidetava täpsusega). Inglise keeles kasutatakse tu-
letise jaoks väljendit “derivative” ja määramata integraali jaoks väljen-
dit “antiderivative”, mis on loomulikum, kui eesti keelne “integraal”.
Märkus 7.4
Funktsioonil f on olemas määramata integraal
parajasti siis, kui sellel
funktsioonil on olemas algfunktsioon.
Teoreem 7.1
Igal vahemikus (a, b) pideval funktsioonil on olemas algfunktsioon selles
vahemikus.
7.4
Integraal
põhilistest
elementaarfunkt-
sioonidest
Konstantne funktsioon
c dx = c x + C,
c ∈ R
Astmefunktsioonid
xα+1
xα dx =
+ C,
α = −1
α + 1
x2
1
x dx =
+ C
dx = ln |x| + C
2
x
1
1
1
√
−
dx =
+ C
√ dx =
x + C
x2
x
2 x
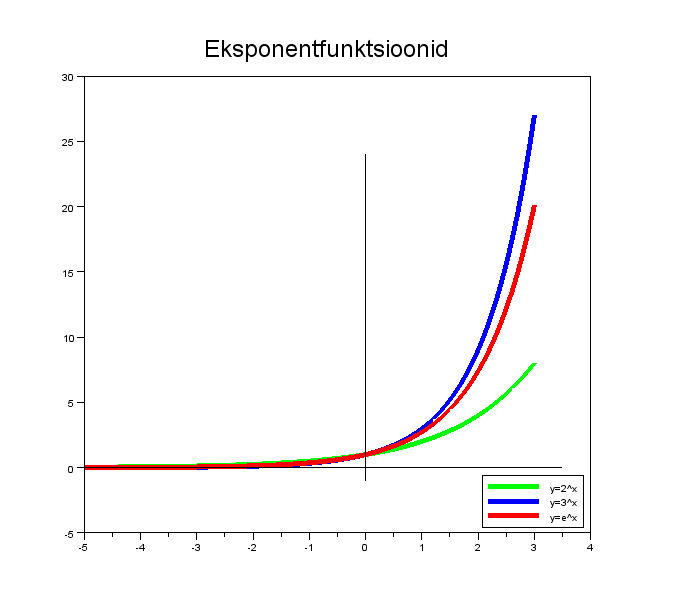
Eksponentfunktsioonid
ax
ex dx = ex + C
ax dx =
+ C
ln(a)
71
PEATÜKK 7. ALGFUNKTSIOON JA MÄÄRAMATA INTEGRAAL
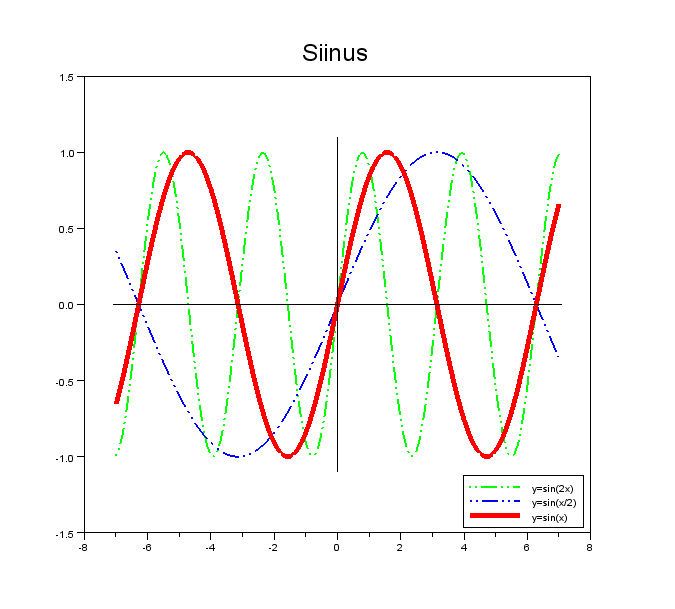
Trigonomeetrilised funktsioonid
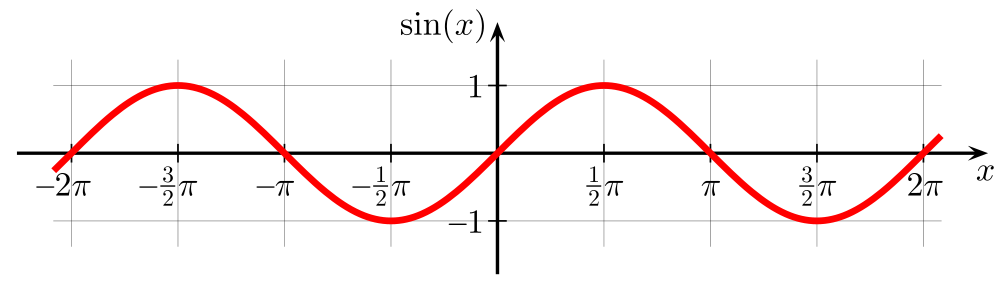
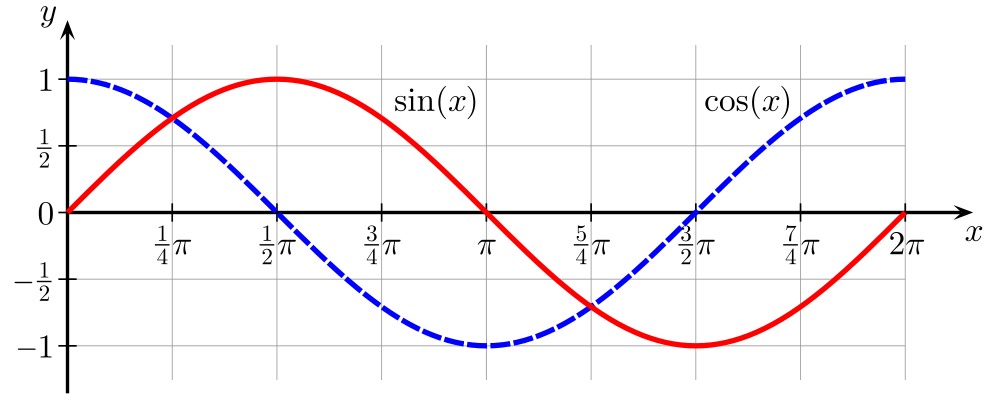
sin(x) dx = − cos(x) + C
cos(x) dx = sin(x) + C
1
1
dx = tan(x) + C
dx = − cot(x) + C
cos2(x)
sin2(x)
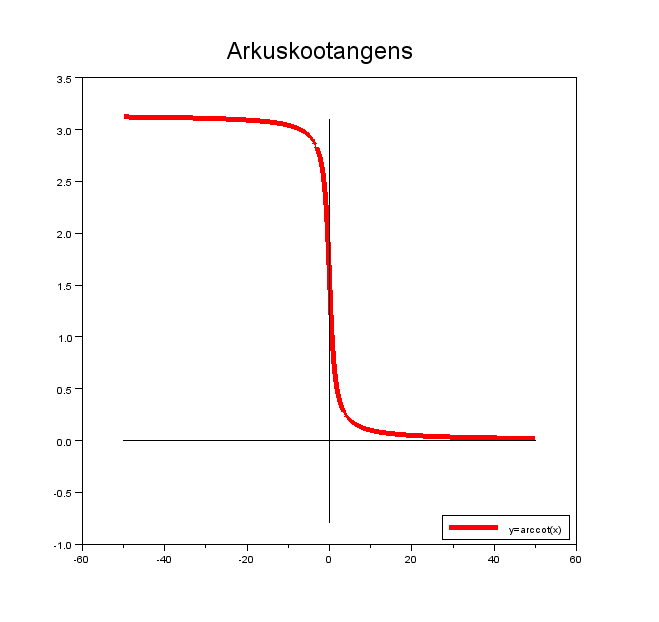
Trigonomeetriliste funktsioonide pöördfunktsioonid
1
1
√
dx =
arcsin (x) + C
√
dx = −
arccos (x) + C
1 − x2
1 − x2
1
1
dx =
arctan (x) + C
dx = −
arccot (x) + C
1 + x2
1 + x2
Hüperboolsed funktsioonid
sh(x) dx = ch(x) + C
ch(x) dx = sh(x) + C
1
1
dx = th(x) + C
dx = − cth(x) + C
ch2(x)
sh2(x)
Hüperboolsete funktsioonide pöördfunktsioonid
1
1
√
dx = arsh(x) + C
√
dx =
arch (x) + C
x2 + 1
x2 − 1
1
1
dx = arth(x) + C
dx = arcth(x) + C
1 − x2
1 − x2
Märkus 7.5
Kõikidel funktsioonidel ei pruugi leiduda algfunktsiooni elemetaar-
funktsioonide kujul (selliste algfunktsioonide väärtusi saab arvutada
ainult ligikaudsete meetoditega). Näiteks järgmisi integraale ei saa esi-
tada elementaarfunktsioonide abil:
sin(x)
e−x2 dx,
cos x2 dx,
dx.
x
72
7.6. Integraal põhilistest elementaarfunktsioonidest
7.5
Tehetega seotud integreerimisreeglid
Teoreem 7.2
Kui on olemas integraalid
f (x) dx ja
g(x) dx, siis kõikide reaalarvu-
de α, β ∈ R korral on olemas integraal (α f (x) + β g(x)) dx, kusjuures
(α f (x) + β g(x)) dx = α
f (x) dx + β
g(x) dx.
(7.2)
Tõestus. Eelduse järgi leiduvad algfunktsioonid F ja G, nii et F (x) =
f (x) ja G (x) = g(x) ja
f (x) dx + β
g(x) dx = α F (x) + β G(x).
Tuletise leidmiste omadustest kehtib
(α F (x) + β G(x)) = α F (x) + β G (x) = α f (x) + β g(x).
Viimane ütlebki, et (α f (x) + β g(x)) algfunktsiooniks on
(α F (x) + β G(x)) .
7.6
Muutuja vahetamine
Lause 7.1
[22, 34]. Kui u = ϕ(x) on diferentseeruv funktsioon muutumispiirkon-
naga U ja f on pidev määramispiirkonnas U , siis kehtib muutuja
vahetamise valem
f (ϕ(x)) · ϕ (x) dx =
f (u) du.
(7.3)
Tõestus. Funktsioon f on pidev, seega tal leidub algfunktsioon F ja järe-
likult
f (u) du = F (u) + C.
Meie eeldustel eksisteerib funktsioonide F ja ϕ liitfunktsioon F ◦ ϕ, mis
on diferentseeruv (kui kahe diferentseeruva funktsiooni liitfunktsioon) ja
kehtib
(F ◦ ϕ) (x) = F (ϕ(x)) · ϕ (x) = f (ϕ(x)) · ϕ (x)
või siis Leibniz’i tähistuses
dF (u)
F (u)
du
du
F (ϕ(x)) =
= f (u) ·
dx
du
dx
dx
Jätkub ...
73
PEATÜKK 7. ALGFUNKTSIOON JA MÄÄRAMATA INTEGRAAL
Tõestus.
Saime , et funktsiooni (f ◦ ϕ) · ϕ algfunktsiooniks on F ◦ ϕ, mis-
tõttu
f (ϕ(x)) ϕ (x) dt = (F ◦ ϕ)(x) + C = F (ϕ(x)) + C.
Seega
f (ϕ(x)) ϕ (x) dx = F (u) + C.
Kasutades eelnevaid
seoseid , saamegi võrduse (7.3).
Märkus 7.6
Muutuja vahetamise võtte
erijuhuks on diferentsiaali märgi alla viimise
võte. Sel juhul on enamasti lihtne leida diferentsiaali du(x) = u (x)·dx.
7.7
Ositi integreerimine
Lause 7.2
[22]. Olgu funktsioonid u ja v mingis intervallis X diferentseeruvad
funktsioonid ja eksisteerigu integraal
v(x) u (x) dx.
Siis eksisteerib ka integraal
u(x) v (x) dx
ja kehtib seos
u(x) v (x) dx = u(x) v(x) −
v(x) u (x) dx.
(7.4)
Tõestus. Tehtud eelduste korral on korrutis u · v diferentseeruv,
[u(x) · v(x)]
= u (x) · v(x) + u(x) · v (x).
Kuna on olemas integraal
v(x) u (x) dx, siis leidub funktsiooni v · u
algfunktsioon F . Järelikult
[u(x) · v(x)]
= F (x) + u(x) · v (x),
millest saame
u(x) · v (x) = [u(x) · v(x)] − F (x) = [u(x) · v(x) − F (x)] .
Saime, et (u · v − F ) on funktsiooni u · v algfunktsioon. Tulemus ütlebki,
et
u(x) v (x) dx = u(x) v(x) − F (x) + C = u(x) v(x) −
v(x) u (x) dx.
74
7.8. Ositi integreerimine
Märkus 7.7
Valemit (7.4) nimetatakse määramata integraali ositi integreerimise
valemiks. Kuna u (x) dx = du ja v (x) dx = dv, siis esitatakse seos
sageli kujul
u dv = u v −
v du.
(7.5)
7.8
Ratsionaalfunktsioonide integreerimine
Vaatleme järgnevalt lihtsamaid juhte polünoomide P (x) ja Q(x)
jagatise P (x)
Q(x)
integreerimisel. Siinjuures eeldame, et murd on antud taandatud
kujul (lugejas olev x kõrgeim aste on väiksem kui
nimetajas olev
x kõrgeim aste). Põhiidee on murd P (x) esitada osamurdude summa-
Q(x)
na. Viimane on võimalik, kuna
igat polünoomi saab esitada korrutisena
liikmetest tüüpi (x − a) ja (x2 + bx + c). Anname idee näidete
varal .
Definitsioon 7.4
Kui polünoomi f (x) aste on väiksem polünoomi g(x) astmest, siis rat-
f (x)
sionaalset funktsiooni
nimetatakse lihtmurruks, vastasel korral
g(x)
aga
liigmurruks .
Lihtmurru osamurdudeks
lahutamise valem.
f (x)
Olgu
lihtmurd . Kui
g(x)
g(x) = a(x − x1)k(x − x2)l . . . (x2 + p1x + q1)m . . .
(kus ruutpolünoomidel ei ole nullkohti), siis kehtib valem
f (x)
A1
Ak
+ . . . +
g(x)
x − x1
(x − x1)k
B1
Bl
+ . . . +
x − x2
(x − x2)l
(7.6)
+ . . . +
C1x + D1
Cmx + Dm
+ . . . +
+ . . . ,
x2 + p1x + q1
(x2 + p1x + q1)m
kus konstandid A1, . . . , Ak; B1, . . . , Bl; . . . ; C1, . . . , Cm; D1, . . . Dm; . . .
on mingid reaalarvud.
75
PEATÜKK 7. ALGFUNKTSIOON JA MÄÄRAMATA INTEGRAAL
Ühekordsed
nullkohad .
7 − x
A
B
x2 + x − 2
x − 1
x + 2
6x2 − 14x − 11
A
B
C
(x + 1)(x − 2)(2x + 1)
x + 1
x − 2
2x + 1
Kordsed nullkohad.
7 − x
A
B
C
D
x(x + 3)3
x
x + 3
(x + 3)2
(x + 3)3
Kui ei ole reaalseid nullkohti.
x3 + 3x2 + 2x + 4
A
B
Cx + D
x2(x2 + 2x + 2)
x
x2
x2 + 2x + 2
1
Ax + B
Cx + D
(x2 + 2x + 2)2
x2 + 2x + 2
(x2 + 2x + 2)2
76
Peatükk 8
Diferentsiaalvõrrandid
8.1
Sissejuhatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
8.2
Diferentsiaalvõrranditest üldiselt . . . . . . . . . . . . . . . . . . . . . . . . . .
78
8.3
Esimest järku diferentsiaalvõrrandid . . . . . . . . . . . . . . . . . . . . . . . .
79
8.4
Eralduvate muutujatega diferentsiaalvõrrandid
. . . . . . . . . . . . . . . . .
79
8.5
Esimest järku lineaarsed diferentsiaalvõrrandid . . . . . . . . . . . . . . . . .
81
Kontrolltöö teemad
1. Esimest järku eralduvate muutujatega diferentsiaalvõrrandi lahendamine.
2. Esimest järku lineaarse diferentsiaalvõrrandi lahendamine.
Eksamiteemad
1. Diferentsiaalvõrrandi ja tema lahendi mõiste.
2. Esimest järku diferentsiaalvõrrand.
3. Esimest järku diferentsiaalvõrrandi Cauchy ülesanne.
4. Esimest järku eraldatud muutujatega diferentsiaalvõrrand.
5. Eralduvate muutujatega võrrandi lahendamise skeem.
6. Esimest järku lineaarne diferentsiaalvõrrand.
7. Esimest järku lineaarse diferentsiaalvõrrandi lahendamise skeem.
PEATÜKK 8. DIFERENTSIAALVÕRRANDID
8.1
Sissejuhatus
8.2
Diferentsiaalvõrranditest üldiselt
Märkus 8.1
Kõik siin
paragrahvis vaadeldavad mõisted käivad esimest järku ha-
rilike diferentsiaalvõrrandite kohta. Kuna seda on raske ja kohma-
kas iga kord eraldi välja kirjutada ja üle lugeda, siis kirjutame edaspidi
lihtsalt “diferentsiaalvõrrandid”. Täpsustame ainult juhul, kus see on
eriti oluline. Tegelikult on diferentsiaalvõrrandite liike väga palju ja
neil kõigil on oma
olemuselt ja lahendamismeetoditelt väga oluliseld
erinevused.
Märkus 8.2
Diferentsiaalvõrrandite korral peame paratamatult mainima mitme
muutuja funktsioone, mida me ametlikult ei ole veel õppinud. Esitu-
ses teeme seda nii vähe kui võimalik. Olgu öeldud, et sarnaselt ühe
muutuja funktsioonile, nimetatakse antud eeskirja z = f (x, y) kahe
muutuja funktsiooniks f , kui igale kahele argumendile x ja y seatakse
vastavusse üks ja ainult üks arv z.
Definitsioon 8.1
Diferentsiaalvõrrandiks nimetatakse võrrandit, milles on otsitavaks
ühe või mitme muutuja funktsioon ning see võrrand seob otsitavat
funktsiooni ja tema tuletisi sõltumatute muutujatega.
Definitsioon 8.2
Harilikuks diferentsiaalvõrrandiks nimetatakse diferentsiaalvõr-
randit, kus otsitav funktsioon y = y(x) sõltub ainult ühest argumendist
x.
Definitsioon 8.3
Diferentsiaalvõrrandi
lahendiks nimetatakse sellist funktsiooni y =
y(x), mille asetamine võrrandisse muudab võrrandi samasuseks sõltu-
matu muutuja x suhtes.
78
8.4.
Definitsioon 8.4
Diferentsiaalvõrrandi üldlahendiks nimetatakse diferentsiaalvõrrandi
lahendit, mis sisaldab
suvalist konstanti C.
8.3
Esimest järku diferentsiaalvõrrandid
Definitsioon 8.5
Esimest järku diferentsiaalvõrrandiks
nimetakse diferentsiaalvõr-
randit kujul
y = f (x, y),
(8.1)
kus otsitavaks on funktsioon y = y(x).
Definitsioon 8.6
Ülesannet, milles otsitakse võrrandi
y = f (x, y)
(8.2)
sellist lahendit y = y(x), mis
rahuldab algtingimust
y(a) = ya,
(8.3)
nimetatakse Cauchy ülesandeks (või ka algtingimusega ülesan-
deks).
8.4
Eralduvate muutujatega diferentsiaalvõr-
randid
Definitsioon 8.7
Esimest järku diferentsiaalvõrrandit (8.1) nimetatakse eraldatud
muutujatega diferentsiaalvõrrandiks, kui selle saab tundmatu
y = y(x) suhtes kirjutada kujul
g(y) dy = f (x) dx.
(8.4)
Ilma diferentsiaalideta on võrrand kujul
g(y) y (x) = f (x).
79
PEATÜKK 8. DIFERENTSIAALVÕRRANDID
Eraldatud muutujatega diferentsiaalvõrrandi saab lahendada
väga lihtsal moel: integreerides võrrandi mõlemaid pooli.
1. Kirjutame y (x) = dy ,
saades võrrandi kujul
dx
dy
g(y)
= f (x).
dx
2. Korrutame võrrandit argumendi muuduga dx:
g(y)dy = f (x)dx.
3. Integreerime võrrandi mõlemaid pooli (vasakut poolt y järgi ja
paremat poolt x järgi):
g(y)dy =
f (x)dx.
4.
Lahend y = y(x) võib esituda nn ilmutamata kujul, kui vasak-
poolne integraal peaks osutuma keeruliseks tehteks.
Definitsioon 8.8
Esimest järku diferentsiaalvõrrandit (8.1) nimetatakse eralduvate
muutujatega diferentsiaalvõrrandiks, kui selle saab viia eralda-
tud muutujatega võrrandiks. Üldiselt on see kujul
f1(x)g1(y)y (x) = f2(x)g2(y).
(8.5)
Eralduvate muutujatega diferentsiaalvõrrandi saab lahendada
järgmiselt:
1. Grupeerime kõik ainult y-st sõltuvad liikmed vasakule poolde ja
ainult x-st sõltuvad liikmed paremale:
g1(y)
f2(x)
dy =
dx,
f1(x), g2(y) = 0.
g2(y)
f1(x)
2. Saime eraldatud muutujatega diferentsiaalvõrrandi, mille lahen-
damiseks integreerime võrduse mõlemaid pooli.
3. NB! Seoses funktsioondega g2 ja f1 jagamisega peab läbi vaa-
tama võimalikud kaduma läinud
lahendid , mis tekivad nulliga
jagamisel.
80
8.5.
8.5
Esimest järku lineaarsed diferentsiaalvõr-
randid
Definitsioon 8.9
Esimest järku lineaarse diferentsiaalvõrrandi üldkujuks on
p0(x)y (x) + p1(x)y(x) = f (x),
(8.6)
kus p0, p1 ja f on antud funktsioonid ning y = y(x) on otsitav. Funkt-
siooni f nimetatakse selle võrrandi vabaliikmeks.
Märkus 8.3
Kui kordaja p0(x) erineb nullist, siis võib selle kordajaga esialgset võr-
randit läbi jagada ning sel juhul on lineaarne I järku võrrand kujul
y (x) + p(x)y(x) = g(x).
(8.7)
Edaspidi kasutame just seda kuju.
Lineaarse võrrandi
y (x) + p(x)y(x) = f (x)
lahendamine integreerimisteguri abil.
1. Korrutame võrrandit läbi suvalise nullist erineva funktsiooniga
µ = µ(x),
µ y + (µ p) y = µ f.
2.
Paneme tähele, et vasak pool oleks korrutise µ · y tuletis
(µ · y) = µ · y + µ · y,
kui kehtiks µ · p = µ . Kuna µ on suvaline funktsioon, siis võimegi
nõuda, et ta oleks selline, et ta rahuldaks diferentsiaalvõrrandit
µ (x) = µ(x) · p(x).
3. Eelmisest võrrandist leiame µ ja sel juhul võrrandist
(µ · y) = µ · f
saame mõlemat poolt integreerides lahendi
1
y(x) =
µ(x) · f (x) dx.
µ(x)
81
PEATÜKK 8. DIFERENTSIAALVÕRRANDID
82
Peatükk 9
Pindala ja Riemann’i integraal
9.1
Pindala leidmine lõplike summade abil
. . . . . . . . . . . . . . . . . . . . . .
84
9.2
Riemann’i summad
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
9.3
Määratud (Riemann’i) integraal
. . . . . . . . . . . . . . . . . . . . . . . . . .
86
9.4
Määratud integraali omadused
. . . . . . . . . . . . . . . . . . . . . . . . . . .
88
9.5
Kõvertrapetsi pindala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
88
9.6
Numbriline integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
Kontrolltöö teemad
1. Riemann’i integraali omadused.
2. Kõvertrapetsi pindala ja selle leidmine.
Eksamiteemad
1. Riemann’i summa mõiste.
2. Riemann’i integraali mõiste.
3. Teoreemid 9.1 ja 9.2.
4. Määratud integraali omadused.
5. Kõvertrapets ja selle pindala.
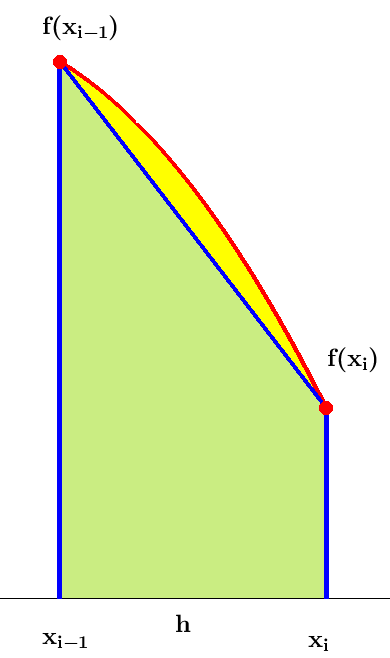
6. Trapetsmeetod.
PEATÜKK 9. PINDALA JA RIEMANN’I INTEGRAAL
9.1
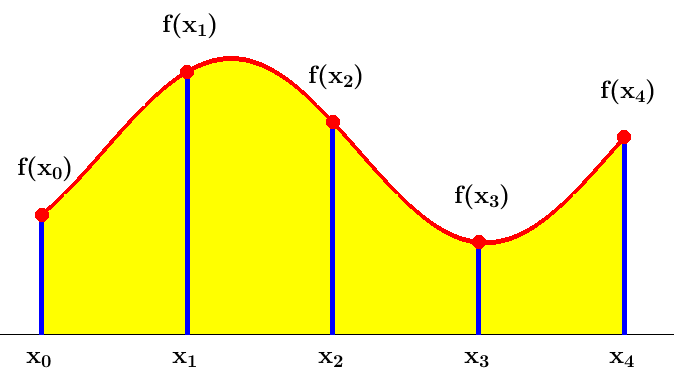
Pindala leidmine lõplike summade abil
Üldisemalt võime pindala S ligikaudu arvutada järgmiselt. Etteantud lõi-
gus [a, b] võtame n osalõiku pikkusega
b − a
∆x =
n
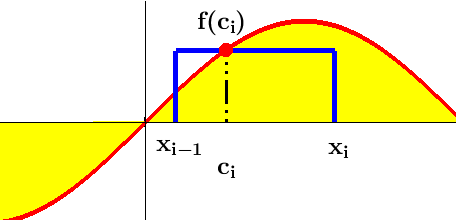
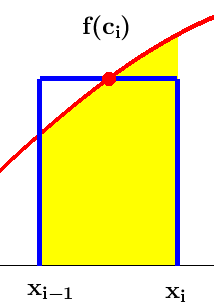
Kui me fikseerime esimeses osalõigus punkti c1, teises osalõigus punkti c2
jne, siis saame ristkülikute pindalasid kokku liites tulemuseks
Sn = f (c1) · ∆x + f (c2) · ∆x + · · · + f (cn) · ∆x.
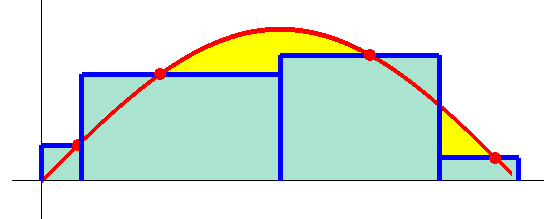
Võttes rohkem ja rohkem osalõike, saame järjest täpsema tulemuse, s.t.
erinevus täpse pindala S ja ligikaudse pindala Sn vahel järjest väheneb.
9.2
Riemann’i summad
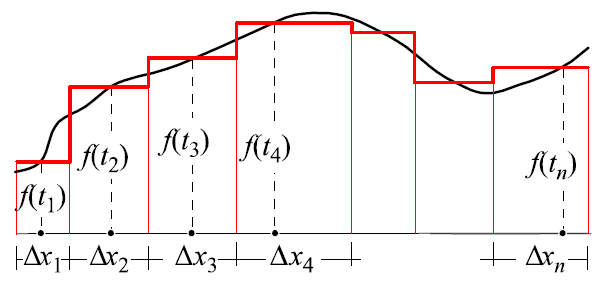
Definitsioon 9.1
Olgu lõigus [a, b] antud funktsioon y = f (x). Teeme lõigus [a, b] ala-
jaotuse ∆n:
a = x0
















































































































































































Kõik kommentaarid