4
Loengukonspekt
õppeaines
Koostanud prof. T.Pappel
MehhatroonikainstituutTallinn2006SISUKORD
SISSEJUHATUS
1.
ptk.
MEHHANISMIDE STRUKTUURITEOORIA
1.1.
Kinemaatilised paarid, lülid,
ahelad 1.1.1.
Kinemaatilised paarid
1.1.2. Vabadusastmed ja
seondid
1.1.3. Lülid, kinemaatilised ahelad
1.2.
Kinemaatilise ahela vabadusaste. Liigseondid. Liigliikuvused
1.2.1. Vabadusaste
1.2.2. Liigseondid.
Liigliikuvused.
1.3.
Mehhanismide struktuuri sünteesimine
1.3.1. Struktuurigrupid
1.3.2. Kõrgpaaride
arvestamine 1.3.3. Kinemaatiline
skeem.
Struktuuriskeem 2.
ptk. MEHHANISMIDE KINEMAATILINE ANALÜÜS
2.1.
Eesmärk. Algmõisted
2.2.
Mehhanismide
kinemaatika analüütilised meetodid
2.3. Tasandilise
mehhanismi kinemaatika arvutusgraafilised meetodid
2.3.1.
Siirete leidmine
2.3.2. Kiirusplaan.
Homoteetse kolmnurga reegel
2.3.3. Düaadmehhanismide
kiirusplaanid
2.3.4. Düaadmehhanismide
kiirendusplaanid
2.3.5. Kinemaatilised
diagrammid 3.
ptk. MEHHANISMIDE DÜNAAMILINE ANALÜÜS
3.1.
Mehhanismides
toimivad jõud ja
momendid . Mehaanilised
karakteristikud 3.1.1. Hõõrdejõud
ja -momendid
3.2. Mehhanismide kinetostaatiline analüüs
3.2.1. Inertsjõudude süsteemi
taandamine ekvivalentseks
inertsjõuks
3.2.2. Asendatavate masside
meetod
3.2.3. Kinemaatilistes
paarides toimivate reakstioonide
arvutamine
3.2.4.
Tasakaalustava koormuse arvutamine Žukovski
meetodiga
3.3. Mehhanismide liikumine neile mõjuvate koormuste toimel
3.3.1. Liikumisfaasid. Töö
ülekande seadus. Kasutegur
3.3.2. Liikumisvõrrandite
leidmine
3.3.3. Liikumisvõrrandite
lahendamine
3.4. Masinate käigu reguleerimine
3.5.
Tasakaalustamine ja
balansseerimine 3.5.1. Vundamendile mõjuvate
dünaamiliste koormuste
kõrvaldamine
3.5.2. Pöörlevate masside
tasakaalustamine ja balansseerimine
4.
ptk. HAMMASÜLEKANNETE
GEOMEETRIA 4.1. Hammasülekannete
liigitus
4.2. Hambumisteooria
alged 4.3. Sirghammastega
silinderülekannete geomeetria
4.3.1.
Terminoloogia 4.3.2. Ringjoone evolvent
4.3.3. Evolventhambumise
kujundamine
4.3.4. Hammaslati hammaste
profiil . Lähtekontuur. Töökontuur
4.3.5. Hammaste lõikamine
4.3.6. Hambapinna
modifitseerimine 4.3.7. Nihutusega
hammasrattad ja ülekanded
4.3.8. Nihutusega
hammasrataste põhiparameetrite arvutus
4.3.9. Piirangud
hammasülekannete sünteesimisel.
Kavaliteedinäitajad
4.3.10. Hamba paksuse
kontrollmõõtmed
4.4.
Kaldhammastega silindeülekanded
4.4.1. Kaldhammaste külgpinna
moodustamine. Hambumise
kujunemine
4.4.2. Seosed
normaal -, ots-
ja telglõikes määratud parameetrite
vahel
4.4.3. Kaldhammastega
ekvivalentne sirghammasratas
4.5.
Wildhaber-Novikovi ringkruvihambumine
4.6. Nihutustegurite valik.
Välis-silinderülekannete geomeetriaarvutus
4.7. Koonusülekannete
geomeetria
4.7.1. Koonusevolventhambumise
elemendid
4.7.2. Koonusrattad.
Koonusülekanded.
Silinderekvivalentülekanded
4.7.3. Koonusrataste hammaste
lõikamine
4.8.
Tiguülekanded
4.8.1. Üldist
4.8.2. Silindertigude tüübid
4.8.3.
Tiguratas .
Tiguhambumine
4.8.4. Tiguülekande kasutegur
5.
ptk.
NUKKMEHHANISMID 5.1. Üldist
5.2. Nukkmehhanismi
geomeetria, kinemaatika.
Mehhanismis mõjuvad jõud
5.3. Nukkmehhanismide
põhimõõtmete arvutus
5.4. Nuki profileerimine
SISSEJUHATUS
Käesoleva
loengukonspekti koostamisel on ulatuslikult kasutatud
prof . Heino
Lepiksoni kirjutatud peatükke õpikutest ja käsiraamatutest.
Mehhanismide
ja masinate teooria
on rakendusmehaanika haru, mis käsitleb mehhanismide ja neist
moodustatud masinate struktuuri, kinemaatika ja dünaamika probleeme,
uurides neid nii analüüsi kui ka sünteesi seisukohalt.
Mehhanismide ja masinate teooriat
õpetatakse TTÜ õppeplaanide kohaselt õppeaines “masinamehaanika”.
Mehhanism
on kehade (lülide) tehissüsteem, mille ülesandeks on etteantud
liikumisega keha (
sisendlüli),
liikumise
teisendamine süsteemi
teatava teise keha (
väljundlüli)
soovitud liikumiseks.
Etteantud
liikumisega kehi (sisenlülisid) võib olla rohkem kui üks. Neid
nimetatakse ka
vedavaiks
lülideks.
Väljundlüli
nim ka veetavaks lüliks.
Konstruktsioonitunnuste
alusel liigitatakse
mehhanismid järgmiselt:
varbmehhanismid (väntmehhanism, väntnookurmehhanism, kulissmehhanism jne),
hammasmehhanismid (hammas- ja tiguülekanded, diferentsiaal - ja planetaarmehhanismid, põrkmehhanismid, malta mehhanismid jt),
hõõrdmehhanismid,
kiilmehhanismid,
kruvimehhanismid,
nukkmehhanismid,
painduvate lülidega mehhanismid ( rihm -, kett- ja trossülekanded).
Teooria
seisukohalt liigitatakse mehhanismid struktuuritunnuste järgi (vt 1.
ptk).
Peale
tahkete lülide kasutatakse mehhanismides ka vedelikke (hüdraulilised
m-d), gaase ( pneumaatilised m-d).
Masin
on:
a)
inimese kehalist ja vaimset tööd kergendav ja tõhustav seade,
mehaanilist liikumist rakendav seadeldis materjalide, energia või informatsiooni muundamiseks
jne…(F.Reuleaux (1829-1905) andis 17 masina definitsiooni, tema tõlkija lisas veel 7)
1. ptk. MEHHANISMIDE
STRUKTUURITEOORIA
1.1. Kinemaatilised paarid,
lülid, ahelad
1.1.1. Kinemaatilised paarid
Mehhanismi
lülid seotakse omavahel nii, et neil säilub võimalus teineteise
suhtes liikuda . Lülide suhtelist liikumist võimaldavaid ühendeid
nim kinemaatilisteks
paarideks (vt
järgmisel leheküljel toodud tabel 1, kus on kujutatud tehnikas enamkasutatavad kin. paarid)
Kinemaatiline
paar koosneb kahest elemendist.
Elemendiks
nim paari moodustavate lülide omavahelises kokkupuutes olevaid osi.
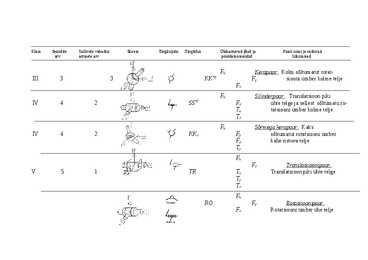
Tabel
1.
Klass Seondite Säilivate vabadus Skeem Tingkujutis Tingtähis Ülekantavad jõud ja Paari nimi
ja säiluvad
arv astmete arv pöördemomendid liikumised
Fx Kerapaar.
Kolm
sõltumatut
rotat-
III 3 3 KK*1 Fy siooni
ümber kolme telje
Fz
Fx Silinderpaar. Translatsioon
piki
IV 4 2 SS*2 Fz ühte
telge ja sellest
sõltumatu ro-
Tx tatsiooni
ümber kolme telje
Tz
Fx Sõrmega
kerapaar. Kaks
IV 4 2 KKs Fy sõltumatut
rotatsiooni
ümber
Fz
kahe ristuva telje
Ty
Fx
Fz Translatsioonipaar.
V 5 1 TR Tx
Translatsioon piki ühte telge
Ty
Tz
Fx
RO Fy Rotatsioonipaar.
Fz
Rotatsiooni ümber ühe telje
Tx
Tz
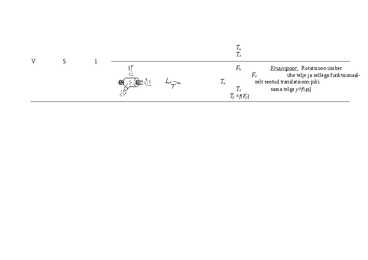
V 5 1
Fx Kruuvipaar. Rotatsioon ümber
Fz ühe
telje ja sellega funktsionaal-
KR Tx selt
seotud translatsioon piki
Tz
sama telge y=f(y)
Ty
=f(Fy)
Elementide kontaktide iseloom
võib olla erinev:
kontaktpinna pindala on lõpliku suurusega - tegemist on nn madalpaariga (vt tabel 1 kus toodud kin. paarid on kõik madalpaarid)
kontaktpinna pindala A = 0 - tegemist on nn kõrgpaariga (vt joon 1), kus võib esineda
a) punktkontakt (joon 1,a
punktid K)
b) joonkontakt (joon. 1,b
joon K-K).
Joonis
1.
Mitmest
paarist koosnevaid , kuid üht ja sama liikumist andvaid paare nim
liitpaarideks
(näiteks kuul- või rull- laager on tervikuna võttes rotatsioonipaar
vt. joon. 1,a). Madalpaari eelised - lihtne valmistada, töökindlad,
pööratavad
st paari moodustavad elemendid võib omavahel ära vahetada ilma, et
liikumine muutuks. Kõrgpaarid on mittepööratavad (vt. joon. 2),
kus on näidatud, et rulli 1 veeremisel lati 2 suhtes joonestab punkt
K tsükloidi 3 (joon
2,a), lati
libisemata veeremisel rullil kujundab punkt K evolvendi
4.
Joonis
2.
1.1.2. Vabadusastmed ja
seondid
Ruumis
vabalt liikuval kehal on 6 vabadusastet - 3 translatsiooni T
ja 3 rotatsiooni R
(joon.3)
Joon.
3.
Kin.
paarid liigitatakse klassidesse seondite arvu järgi (vt. tabel 1)
Tasandilistes
mehhanismides st mehhanismides, kus kõik lülid liiguvad mingi
pinnaga paralleelsetes pindades , esinevad ainult translatsiooni- ja
rotatsioonipaarid ning kõrgpaarid.Konstruktiivsetel kaalutlustel asendatakse mõned kinemaatilised paarid liitpaaridega. Näiteks
sõrmega kerapaari asemel kasutatakse kardaanliigendit (Hooke’i
liigendit).
1.1.3. Lülid, kinemaatilised ahelad
Kehi,
millest moodustub mehhanism, nim lülideks.
Lülisid
liigitatakse
tahked ,
vedelad,
gaasilised.
Tahked
lülid loetakse absoluutselt jäikadeks.
Sõltuvalt
kin.elementide arvust esinevad
lihtlüli (kin.elementide arv 1),
kaksiklüli (2 kin.elementi, vt. joon. 4),
kolmiklüli (3 kin.elementi).
Joon.
4
Kin.paaridega
seondatud lülid moodustavad kinemaatilise
ahela (analüüsi
joonisel 5 toodud kompressori või pumba skeemi, kus 5c on kin. ahel.
Sisendlüliks (vedavaks lüliks) on siin vänt 1, vahelüliks keps 2,
väljundlüliks (veetavaks lüliks) kolb 3)
Joon.5
Mehhanismi
def-st tulenevalt peab mehhanismi sisendlüli (lülide) etteantud
liikumisega olema üheselt määratud kõikide teiste lülide
(vahelülide, väljundlülide) liikumine.
Kõik
mehhanismid on kinemaatilised ahelad. Kõik ahelad ei ole
mehhanismid, kuna on võimalik koostada ahelaid, mille puhul pole
täidetud mehhanismi definitsioon.
Ahelate liigitus:
tasandilised ahelad - lülid liiguvad mingi pinnaga paralleelsetes pindades,
ruumilised ahelad,
suletud ahelad,
avatud ahelad. (Näited tuuakse loengul)
1.2. Kinemaatilise ahela
vabadusaste. Liigseondid.
Liigliikuvused
1.2.1. Vabadusaste
Kuna
ühel vabal kehal on 6 vabadusastet (vt joon.3), siis m
lüli (keha) korral on vabadusastmete arv w
= 6m.
V
kl. kin. paar annab 5 sidet st. s
= 5
IV
kl. kin. paar - s =
4
III
kl. kin. paar - s =
3 jne.
Kui
tähistada
V
kl. kin. paaride arv –
pv
IV
kl.- piv
III
kl.- pIII
jne,
on
sidemete arv
ja
vabadusastmete arv
kuna 1 lüli on liikumatu (raam, korpus).
Kui
tähistada m - 1 =
n, kus n
- liikuvate lülide arv on
…
1.1
Valemit
1.1 nim ruumilise mehhanismi struktuurivalemiks, Vene kirjanduses
Malõševi (1923), läänes Kutzbachi (1933) valemiks . Tasapinnalise
mehhanismi korral lisandub 3 sidet.
Tasapinnalise
mehhanismi vabadusastmete arv
…
Siit selgub , et III ja madalama kl. kin. paare ei saa kasutada
tasapinnalise mehhanismi moodustamiseks. Seega on tasapinnalise
mehhanismi vabadusastme arv määratav seosega
…
1.2
Valemit
1.2 nim tasapinnalise mehhanismi struktuurivalemiks, aga ka Grübleri
või Tšebõševi valemiks.
Antud
ahela korral saab vabadusastmeid arvutada valemitega 1.1 või 1.2,
kuid on kasutatav ka seos
…
1.3
st.
avatud ahela vabadusaste võrdub tema kin.paaride poolt säilitatud
liikuvusastmete summaga .
Ahela
vabadusaste näitab parameetrite arvu, mille juures on määratud
ahela kõikide lülide liikumine. Kui vabadusastmete arv w
= 1, on ahela
kõikide lülide liikumine määratud üheainsa parameetriga, mis
tavaliselt omistatakse sisendlülidele. Kui w
= 2, võib
mehhanismis olla kaks sisendlüli (etteantud liikumisega lüli) jne.
[Näited loengul].
1.2.2. Liigseondid.
Liigliikuvused.
Seondit,
mis kordab (dubleerib) mehhanismis juba varem teiste paaride poolt
kehtestatud seondit, nim. liigseondiks
(kasutatakse veel nimetusi “passiivseond”, “dubleeriv seond”).
[Näited loengul] Liigseondeid annab ka mehhanismi tasandilisuse
nõue. Reaalsetes konstruktsioonides tasandilisi mehhanisme ei
eksisteeri, kuna detailide valmistamisel tekivad paratamatult
valmistamisvead.
Vabadusastmete
arvu määramise lisandub valemisse 1.1 liigseondite arv q
ja seega on
…
1.4
Liigliikuvuseks
nim. neid mehhanismi lülide liikuvusi, mis pole seotud mehhanismi
kinemaatilise funktsiooni realiseerimisega. [Loengul tuuakse näiteid
üksiku lüli liigliikuvuse ja grupilise liigliikuvuse kohta].
Liigliikuvust
arvestades on põhivabadusastmete arv
…
1.5
kus
wl
- liigliikuvuste arv.
Liigseondite
arvu
…
1.6
määramisel
tuleb põhivabadusastmete arv võtta võrdseks mehhanismile etteantud
liikumisparameetrite (vedavate lülide) arvuga. Liigliikuvuste arv
selgub tavaliselt mehhanismi kinemaatiliselt skeemilt. Liigseondite
kõrvaldamiseks tuleb alandada ahelas olevate kin.paaride klassi
niipalju, kui on liigseondeid. [Näited loengul].
Liigseondite
puudumist ja liigliikuvuste võimaliku olemasolu kontrollimiseks
kasutatakse ka mõttelise
eksperimendi (montaazi) meetodit.
Mõttelise eksperimendi (montaazi) idee - kontrollida, kas mehhanismi
on võimalik monteerida nii, et tema detailid ei deformeeruks ja
monteeritavate elementide teljed oleksid paralleelsed.
1.3. Mehhanismide
struktuuri sünteesimine
1.3.1. Struktuurigrupid
Struktuuri
sünteesi
all mõeldakse mehhanismi struktuuri projekteerimist, kus määratakse
kindlaks lülide ja kin.paaride arv, iseloom ning nende vastastikune asetus . Ühtlasi valitakse kinnislüli.
Sünteesil
kasutatakse struktuurigruppide
ladestamise
meetodit.
Struktuurigruppideks
(Assuri gruppideks) nim. avatud ahelaid, mille vabadusaste muutub
nulliks, kui nad mehhanismiga liita.
Tasapinnalistel
mehhanismidel
w3
= 3n-2pV
= 0,
kui
n = 2, pV = 3 , siis nim. struktuurigruppi düaadiks;
n = 4, pV = 6 , siis nim. struktuurigruppi triaadiks;
n = 6, pV = 9 ,on tegemist tetraadi e. neljahaarmelise grupiga;
jne.
[Näited loengul].
Struktuurigruppide
ladestamiseks (liitmiseks) varustatakse struktuurigrupi lüli või
lülid lisaelemendi või lisaelementidega. [Näited loengul].
1.3.2. Kõrgpaaride
arvestamine
Kõrgpaare
võib taandada
madalpaarideks st. asendada muutuva pikkusega kaksiklüliga. Asendav kaksiklüli peab tagama sama liikumise kui kõrgpaar. Seda nõuet
saab üldjuhul täita vaid hetketi st. iga järgneva hetke jaoks
tuleb asendamist korrata.
Kõrgpaari
taandamise käik: [Näited loengul]
1) tõmmata kõrgpaari
moodustavatele profiilidele ühisnormaal;
otsida profiilide kõverustsentrid (profiilide kõverusraadiused on üldjuhul muutuvad suurused);
joonestada kõverustsentritesse rotatsioonipaarid ja ühendada need kõrgpaari asendava lüliga;
joonestada välja mehhanism.
1.3.3. Kinemaatiline skeem.
Struktuuriskeem
Mehhanismi
kinemaatiline skeem
on selle mehhanismi mõõtkavaline skemaatiline kujutis, (vt. joon.
5c – kui see skeem on joonestatud mõõtkavalisena, on tegemist
kinemaatilise skeemiga).
Mõõtkava
on määratud mastaabiteguriga
, mis näitab, mitu
ühikut tegelikku suurust (pikkust, aga ka kiirust, kiirendust, jõudu
jne.) vastab joonise vastava lõigu ühele millimeetrile.
Mastaabiteguri
ühikud
või
jne.]
Struktuuriskeemil
arvestatakse ainult lülide tüüpi (liht-, kaksik-, kolmiklüli, …)
ja kin.paaride klassi.
Kõik
V klassi kin.paarid näidatakse rotatsioonipaari leppemärgiga.
[Näited
loengul].
2. ptk. MEHHANISMIDE
KINEMAATILINE ANALÜÜS
2.1. Eesmärk. Algmõisted
Mehhanismide
kinemaatilise
analüüsi all
mõistetakse lülide siirete, kiiruste ja kiirenduste arvutamist.
Siiretel
on vaja määrata tema pikkus ja lüli punktide trajektoor . Kepsu
mistahes punkti trajektoori nim. kepsukõveraks.
Iga
lüli siire , kiirus ja kiirendus määratakse tema koordinaadi ja
selle esimese ning teise tuletisega aja järgi.
Mehhanismi
üldistatud koordinaadiks
nim. omavahel sõltumatuid mehhanismi kõikide lülide asendeid
kinnislüli suhtes määravaid koordinaate. Mehhanismi üldistatud
koordinaatide arv võrdub tema vabadusastme arvuga.
Alglüliks
nim. lüli, mille koordinaat on mehhanismi üldistatud koordinaadiks.
Alglüli ei pea kokku langema sisendlüliga. Alglüliks võib võtta
ka väljund- või vahelüli. Alglüli liikumisseadus
st. funktsioon 1
= 1(t)
peab kin.analüüsi alustamisel olema teada.
Teiste
lülide siirded (näiteks lüli i
nurksiire i)
on otstarbekas määrata mitte vastava liikumisseadusega i
= i(t) vaid nn. siirdefunktsiooni i
= i(1)
abil, kuna viimane sõltub
ainuüksi mehhanismi geomeetriast
(konfiguratsioonist). See asjaolu võimaldab mehhanismi
kinemaatikat uurida
alglüli
liikumisseadust eelnevalt määramata, [Selgitused
ja näited loengul].
Lähtudes
siirdefunktsioonist ja diferentseerides seda mehhanismi üldistatud
koordinaadi 1
järgi, saadakse kiiruste
ja kiirenduste
analoogid.
Lüli i nurkkiiruse analoog ,
lüli i
nurkkiirenduse analoog ,
lüli j joonkiiruse analoog ,
lüli j
joonkiirenduse analoog .
Pöörleva
alglüli puhul on nurkkiiruse ja -kiirenduse analoogid dimensioonita,
joonkiiruse ja -kiirenduse analoogidel aga on pikkuse dimensioon.
Kiiruste
ja kiirenduste ning nende analoogide vahelise seose tuletamisel
lähtume sellest, et lüli i
siirdefunktsiooni
i
= i [i
(t)]
võib
käsitleda liitfunktsioonina. Rakendades liitfunktsioonide tuletamise algoritmi , on
…
2.1
ja
…
2.2
Samalaadsed
üleminekuvalemid saadakse ka joonsuuruste ja nende analoogide vahel
, … 2.3
, … 2.4
2.2. Mehhanismide kinemaatika
analüütilised meetodid
Suletud
tasapinnaliste ahelate jaoks kasutatakse
suletud vektorhulknurkade meetodit,
avatud ahelate korral maatriksteisenduse
meetodit. Suletud
vektorhulknurkade meetodi kohta on koostatud eraldi loengukonspekt.
2.3. Tasandilise
mehhanismi kinemaatika
arvutusgraafilised
meetodid
Arvutusgraafilised
meetodid on lihtsamad ja ülevaatlikumad kui analüütilised. Puudus
- pole alati küllaldase täpsusega.
Kõikide
graafiliste meetodite kasutamisel on esimeseks sammuks kinemaatilise
skeemi (vt. punkt 1.3.3.) joonestamine , kusjuures kõrgemad
kinemaatilised paarid taandatakse (vt. punkt 1.3.2.).
2.3.1. Siirete leidmine
Siirete
leidmisel kasutatakse mehhanismi invariante st. muutumatuid suurusi.
Nendeks on lülide konstantsed pikkused, kaugused mitteliikuvate
( raamiga ühendatud) kin.paaride sh. translatsioonipaaride vahel jne.
[Näited
loengul].
2.3.2. Kiirusplaan. Homoteetse
kolmnurga reegel
Olgu
teada ühe lüli kahe punkti M ja N kiirused vastavalt
ja
(vt. joon 6c ja 6d järgmisel leheküljel). Sama lüli kolmanda
punkti K kiiruse
leidmisel vaatleme etteantud kiirusega punkte kui relatiivse liikumise pooluseid. Koostame vektorvõrrandid
…
2.9
kus
on punkti K suhteline joonkiirus punkti M suhtes (punkti K
pöörlemiskiirus ümber pooluse M) ja
on punktide K ja N suhteline joonkiirus.
Kiirusplaani
koostamist alustatakse plaani pooluse p kandmisest joonisele,
kusjuures tema asukoht valitakse suvaliselt. Kiirusi
ja
mastaabis kujutavate vektorite pikkused
kus
- kiirusplaani mastaabitegur.
Märk
“ ˘
“ tähise kohal näitab siin ja edaspidi, et tegemist on lõiguga
joonisel.
Lõigu
kanname joonisele lähtuvana poolusest p paralleelsena -ga.
Lõigu otspunktist m tõmbame ristsirge lüli punkte M ja K läbiva
sirge suhtes. See sirge on suhtelise kiiruse
siht. Analoogiliselt kanname kiirusplaanile lõigu
paralleelsena -ga
ja tema otspunktist n ristsirge lüli punkte K ja N läbiva sirge
suhtes. Saame suhtelise kiiruse
sihi. Vektorvõrrandit 2.9 rahuldab suhteliste kiiruste vKM
ja
sihtide lõikepunkt k. Lüli punkti K absoluutse kiiruse
suuna ja suuruse saamiseks ühendame kiirusplaani punkti k poolusega. Varustame kiirusplaanil olevad vektorid nooltega vastavalt
võrrandile 2.9.
Punkti K kiiruse suurus ( moodul )
Lüli kolmnurk MNK ja kiirusplaani kolmnurk mnk on geomeetriliselt sarnased
ja tipud sama järjestusega - järelikult homoteetsed.
Siit tuleneb homoteetse kolmnurga reegel, mis kehtib nii kiirus- kui
kiirendusplaanide korral: kui on teada ühe lüli kahe punkti M ja N
kiirused või kiirendused, siis selle lüli kolmanda punkti K kiiruse või kiirenduse leidmiseks joonestatakse kiirus- või
kiirendusplaani küljele mn kolmnurk mnk, mis on homoteetne
kinemaatilisel skeemil esineva kolmnurgaga MNK. Poolusest tippu k suunduv vektor kujutabki otsitavat kiirust või kiirendust.
Järeldused:
Absoluutseid kiirusi (kiirendusi) kujutavad vektorid väljuvad poolusest. Suhtelise kiiruse (kiirenduse) vektorid paiknevad perifeerselt.
Absoluutse kiiruse (kiirenduse) tähisel on vastavat punkti näitav indeks, suhtelise kiiruse (kiirenduse) tähisel on neid kaks, kusjuures teine tähis viitab punktile, mille suhtes vaadeldakse liikumist.
Suhtelise kiiruse indeksid ja vastava vektori tähised kiirusplaanil on permuteeritud ( vahetatud ). Näiteks vektorit kujutab kiirusplaanil vektor .
2.3.3. Düaadmehhanismide
kiirusplaanid
Düaadides
esineb kaht tüüpi lülisid, mida käsitletakse eri viisil.
Lüli,
millel mõlemad vaadeldavad kinemaatilised paarid on
rotatsioonipaarid, kuulub 1.
tüüpi.
Kui
ühe rotatsioonipaari B (punkti B) absoluutkiirus on
teada, siis mis tahes teise punkti C kiirus (vt. 2.3.2.)
…
2.10
Võrrandis
2.10 on vB
teada nii suuruselt kui suunalt, vCB
on rist punkte CB ühendava sirglõiguga. Tundmatuid on seega kolm (
moodul,
siht ja moodul). Lüli nurkkiirus
, … 2.11
kusjuures
selle suund selgub pärast düaadi kiirusplaani koostamist.
2.
tüüpi lülid on
translatsioonipaari abil seotud juhikuga x-x. 2. tüüpi lülide
kiirusi arvestama hakates rakendatakse liitliikumise puhul kehtivat
seost
…
a.
Joon.
6
Lüli
CD (joon. 6) kaasaliikumine on liikumine koos juhikuga. Punkti C kaasaliikumiskiirus on seetõttu juhiku küljes oleva ja lüli punktiga C antud hetkel kokkulangeva punkti Cx
kiirus .
Suhtelise liikumise määrab translatsioonipaar D, mistõttu see
kulgeb rööbiti sihiga x-x. Vastavat kiirust tähistatakse .
Seos a avaldub seetõttu järgmiselt:
…
2.12
kus
siht on paralleelne juhikuga x-x. Juhiku punkti Cx
kiirus on üldjuhul homoteetsete kolmnurkade reegli abil alati
leitav:
siht on xx-ga
moodul tundmatu. Seega sisaldab ka võrrand 2.12 kokku kolme
tundmatut ega ole üksi lahendatav. Lüli CD nurkkiirus .
Düaade
moodustavate lülide kiiruste
arvutamise algoritm
[Näited loengul ja praktilistes tundides ]
Düaadi kummagi lüli kohta kirjutatakse vastavalt tema tüübile võrrand 2,10 võiu 2.12. Tulemuseks on kahest vektorvõrrandist koosnev süsteem.
Elimineeritakse ühine, kahte tundmatut sisaldav vektor. Tekib uus vektorvõrrand, kus tundmatud on ainult kaks moodulit.
Saadud võrrand lahendatakse graafiliselt st. koostatakse uuritava düaadi kiirusplaan.
2.3.4. Düaadmehhanismide
kiirendusplaanid
Kiirendusi
on võimalik arvutada ainult pärast kiirusplaanide koostamist.
tüüpi lüli võrrand on:
…
2.13
kus
ning
on vastavalt punkti C pöörlemisel ümber B tekkivad normaal- ja
tangentsiaalkiirendused. Vektor
on
BC-ga, moodul on tundmatu. Normaalkomponent (kesktõmbekiirendus)
…
2.1
kus - kiirusplaani mastaabitegur,
- lõik kiirusplaanil,
- punktide B ja C vaheline kaugus (lüli BC pikkus). Vektor
kulgeb punktist C punkti B poole.
Lüli
BC nurkkiirendus
tüüpi lülide puhul kasutatakse liitliikumise kiirenduse võrrandit
…
2.15
Selles
võrrandis on kui
kaasaliikumiskiirendus enamikul juhtudel juhiku kahe punkti etteantud
kiirenduste kaudu homoteetse kolmnurga reegliga määratav.
Coriolise kiirendus
on arvutatav ja x-x sihilise suhtelise kiirenduse
moodul on tundmatu. Tundmatuid on seega kokku kolm. Coriolise
kiirenduse moodul
kus
nii
kui
on kiirusplaani põhjal arvutatavadEt vektor ristub
vektorite
ja
poolt määratud tasandiga, peab ta asuma mehhanismi tasandis ,
ristuma juhikuga xx ja moodustama vektoritega
ja
paremkolmiku. Praktikas kasutatakse sageli järgmist võtet:
suuna määramiseks pööratakse vektorit
90o
ümber algpunkti
suunas.[Näited loengul ja praktilistes tundides].
2.3.5. Kinemaatilised
diagrammid
Korduvate arvutustega saadud tulemuste kogumi ülevaatlikuks esitamiseks
kasutatakse kin. diagramme ,
mis kujutavad mehhanismi kinemaatiliste parameetrite sõltuvust
üldistatud koordinaadist või ajast.
Kinemaatilise
tsükli all
mõistetakse aega, mille jooksul mehhanismi kõik lülid naasevad
lähteasendisse.
Graafiline diferentseerimine ja graafiline integreerimine :
vt praktiliste tundide materjali.
ptk. MEHHANISMIDE DÜNAAMILINE ANALÜÜS
Mehhanismides toimivad jõud ja momendid
Mehaanilised
karakteristikud
Kõiki
mõjuvaid jõudusid (momentisid) liigitatakse
välisjõud
sidemereaktsioonid.
Välisjõudude
rühmad:
Tabel
2.
1.
Motoorsed jõud , motoorsed momendid . Nende töö tsükli jooksul on “+” st. .
Mõjuvad vedavale lülile tema liikumise suunas
2.
Kasuliku koormuse jõud , momendid Tk
(kasulik tekistus).
Jõud, mille ületamiseks masin on loodud. Rakenduvad täiturlülidele.
3.
Raskusjõud Fg. Töö , tsükli lõpuks .
4.
Keskkonnatakistuse jõud Fkt , .
5.
Hõõrdejõud Fh, Wh 0.
Seose (a) põhjal
, ... 3.10
kus
nurk
on määratav otse mehhanismi skeemilt, jõu rakenduspunkti kiiruse
analoog
ning lüli j nurkkiiruse analoog -
kinemaatilise analüüsi meetoditega. Andes redutseerimislüli
pöördenurgale
sobivalt valitud summaga
järkjärgulisi väärtusi, arvutatakse kiiruste analoogid ja siis .
[Näited loengul].
Sageli
määratakse redutseeritud motoorsed momendid
ja redutseeritud takistusmomendid
eraldi.
Liikumisvõrrandite lahendamine
Käesolevas
punktis vaatleme hooteoreemi (energia integraali) ja hooteoreemi
diferentsiaalkujul kasutamist dünaamilise mudeli liikumise uurimisel .
A.
Hooteoreemi (eneria integraali) kohaselt (vt. seos 3.6) on ümber
kinnispunkti pöörleva redutseerimislüli korral kineetilise energia
muutus
, ... 3.11
kus Tr -
redutseeritud pöördemoment,
-
redutseerimislüli pöördenurk,
-
redutseeritud pöördemomendi poolt tehtud motoorsete ja
takistustööde summa,
-
vastavalt redutseeritud inertsmoment ja redutseerimis-
lüli nurkkiirus
vaadeldava vahemiku alguses,
-
samad suurused vahemiku lõpus.
Seosest
3.11 avaldatakse redutseerimislüli nurkkiirus
, ...3.12
mida
arvutatakse korduvalt andes redutseerimislüli pöördenurgale
väärtusi sammuga .
Integraali
arvutatakse kas graafilisete või numbriliste meetoditega. Arvutuste
tulemusena saadakse
. [Näited loengul]
Kui
alustada nurkkiiruse määramist käivitushetkest, siis .
Nurkkiiruse
määramist püsifaasis käsitletakse edaspidi. Redutseerimislüli
pöördenurga läbimiseks kuluv aeg
arvutatakse seosest
...
3.13
andes
pöördenurgale
väärtusi sammuga . [Näited loengul].
Nurkkiiruse
sõltuvus ajast st.
saadakse graafikute
ja
põhjal pöördenurga
ellimineerimise teel. [Näide loengul].
Redutseerimislüli
nurkkiirenduse
leidmisel võib
a)
diferentseerida sõltuvust
aja t järgi st.
, ... 3.14
kus on vastavalt nurkkiiruse ja aja mastaabitegurid graafikul,
-
graafiku i-nda punkti puutuja tõusunurk
b)
lähtudes seosest ,
on
, ... 3.15
kus -
vända pöördenurgale vastava
graafiku punkti ordinaat ,
-
sama punkti puutuja tõusunurk.
Kui
redutseeritud motoorne moment sõltub redutseerimislüli
nurkkiirusest
ja redutseeritud takistusmoment sõltub redutseerimislüli
nurkpaigutusest
samuti nagu redutseeritud inertsmomentki ,
esitame võrrandi 3.11 kujul
. ... a
Eeldusel ,
et redutseerimislüli pöördenurgale
korduvate arvutuste käigus antud väikese sammu
piires muutub motoorne moment Tm
lineaarselt, võib
võtta
. ... b
Asendame
võrrandis (a) integraali kujul (b) st.
saame
, ... 3.16
kus
. … ( c)
Võrrand
3.16 on parabooli võrrand, kus pöördenurga
ulatuses on C
ja C1
konstandid.
Võrrandis (c ) on
kus on pindala graafiku
ja abstsisstelje vahel, mis on piiratud pöördenurka
fikseerivate abstsissidega. [Näide loengul]
Nurkkiirus
pöördenurga
lõpus
leitakse võrrandi 3.16 ja etteantud kooslahendamisel.
Kui etteantud
on esitatud graafikuna, tuleb leida selle graafiku ja võrrandiga
3.16 määratud parabooli lõikepunkt. Sellele punkti põhjal
leitakse
graafikult. [Näide loengul].
B.
Hooteoreem diferentsiaalkujul:
Kuna
on
. … 3.17
Võrrandist
3.17 avaldub redutseerimislüli nurkkiirendus
. … 3.18
Võrrandist
3.18 selgub, et konstantse redutseeritud pöördemomendi Tr
puhul kutsub inertsmomendi vähendamine esile nurkkiirenduse
kasvamise.
Kui
algasendis ,
arvutatakse
ja
algasendi vahetus lähtudes oletusest, et suvaliselt valitud väikese
ajavahemiku
kestel on mudeli nurkkiirendus konstantne ja võrdne tema väärtusega
algasendis:
Sel
juhul on
ja .
3.4. Masinate käigu
reguleerimine
Masinate
käigu reguleerimine võib olla aperioodiline
või perioodiline.
Aperioodiline
reguleerimine tähendab masina hoidmist püsifaasis
st. tingimuse
täitmist. Selleks tuleb motoorset tööd
takistustöö Wt muutustega kohandada. Kasutatakse kiiruste
regulaatoreid.
Langeva karakteristikuga jõumasin suudab teatavates piirides ise oma
tööd reguleerida: takistustöö muutusele järgneb siirdefaas ja
agregaat hakkab tööle uues püsigaasis konstantse, kuigi eelmisest
erineva keskmise kiirusega.
Masina
käigu perioodiline
reguleerimine on alglüli nurkkiiruse hetkväärtuse tsüklilise
kõikumise leevendamine st. masina käigu ebaühtluse teguri
…
(3.19)
hoidmine
lubatavates piirides (k
- keskmine nurkkiirus). Need piirid on kogemuslikud:
automootorile
on
0,005
pumpadel,
sepistusmasinatel
= 0,03…0,2 jne.
Praktiliselt
toimub perioodiline reguleerimine hooratta
abil.
Alglüli
keskmine nurkkiirus
…
(3.20)
Seoste
3.19 ja 3.20 alusel on
…
(3.21)
…
(3.22)
võib
piisava täpsusega arvutada järgmiselt:
…
(a)
…(b)
Redutseerimislüli
kineetiline energia
kust
redutseerimislüli nurkkiiruse ruut
…
(3.23)
vt
joon. 19.
Joon.
19.
Avaldiste
3.23 ja a ning b põhjal on
…
(3.24)
ja
…
(3.25)
Hooratta
vajalik inertsmoment
…
(3.26)
Kuna
ja
on . … ( c )
Teisest
küljest
…
(3.27)
Võttes
arvesse seoseid 3.27, 3.23 ja c on
kust
vajalik hooratta inertsmoment
. .. (3.28)
Hooratta
kujundamisel,[näited loengul]
, … (3.29)
kus D
- hooratta pöia ristlõike raskuskeset läbiva ringjoone diameeter,
G
- hooratta kaal,
R
= D/2 .
Hooratta
hoomoment
, … (3.30)
tema
kaal
. … (3.31)
Hooratta
kaal on pöördvõrdeline tema pöia ristlõike raskuskeset läbiva
ringjoone diameetri ruuduga .
Tasakaalustamine ja balansseerimine
Mehhanismi
masside
tasakaalustamiseks
nim. masside valikut ja paigutamist eesmärgiga vähendada või
kaotada dünaamilisi lisakoormusi.
Tasakaalustamise
ülesanne:
Vundamendile ülekantavate dünaamiliste koormuste kõrvaldamine.
Kinemaatilistes paarides toimivate dünaamiliste koormuste tasakaalustamine.
3.5.1.
Vundamendile mõjuvate dünaamiliste koormuste
kõrvaldamine
Inertsjõudude
süsteem on tasakaalus, kui inertsjõudude peavektor
ja peamoment . [Joonis loengul]
Inertsjõudude
süsteemi peavektori
Fj
projektsioonid koordinaattelgedele:
…
(a)
…
(b)
Tasapinnalises
käsitluses on .
Koordinaatide
alguse suhtes arvutatud inertsjõudude peamomendi
projektsioonid
…
(c )
…
(d)
… (e)
Kuna
…
(f)
ja
, … (g)
on
, … (h)
. … (i)
Selleks,
et inertsjõudude süsteemi peavektori projektsiooni x- teljel Fjx
erinevatel liikumisparameetritel (nurkkiirusel 1
ja nurkkiirendusel 1)
võrduks nulliga, peab
…(j)
ja
. … (k)
Kui
on täidetud tingimus k, on täidetud ka tingimus j.
Kui
võtta
kus m
- süsteemi kogumass
xc
- süsteemi raskuskeskme x-telje sihiline koordinaat,
siis
tingimus
on
täidetud, kui xc
on konstantne. Valemi (b) põhjal saab analoogilise arutlusega
tingimuse Fjy=0
täitmise eelduseks olukorra, kus yc=0.
Tingimus
xc
ja yc
on konstantsed tähendab, et süsteemi raskuskeskme asend ei sõltu
ei mehhanismi asendist ega tema liikumisreziimist. Seda tingimust
nim. staatilise
tasakaalu tingimuseks .
Inertsjõudude
peamomendi
projektsiooni x-teljel (vt. seos c) võib, võttes arvesse valemit
(g), välja kirjutada kujul
Selleks,
et Mjx=0
sõltumata mehhanismi liikumisparameetritest (1,
1,
1),
peab
…
(l)
ja
. … (m)
Kui
on täidetud tingimus (m), on samaaegselt täidetud ka tingimus (l).
Kuna
kujutab endast massi tsentrifugaalinertsmomenti pinna zy suhtes st.
peab
tingimuse (m) täitmiseks olema Izy konstant.
Analoogilise
aruteluga valemi (d) puhul jõuame järeldusele, et inertsjõudude
peamoment ,
kui massi tsentrifugaalinertsmomendid on konstantsed. Seda tingimust
nim. puhtdünaamilise
tasakaalu tingimuseks.
Masin
on täielikus e.
dünaamilises tasakaalus
(ei tekita vundamendile täiendavaid dünaamilisi koormusi ) siis, kui
on üheaegselt täidetud nii staatilise kui puhtdünaamilise
tasakaalu tingimused.
Loengul
analüüsitakse joonisel 20 toodud ja ka muid juhte.
Joon.
20.
Pöörlevate masside tasakaalustamine ja
balansseerimine
Pöörlevate
masside ( rootorite ) tasakaalustamisel tähendab raskuskeskme asendi
muutumatuse nõue seda, et raskuskese peab asuma pöörlemisteljel.
Staatilisest
tasakaalustamisest piisab kettakujuliste rootorite korral, kuna
tsentrifugaalinertsmomendid ei saa nende puhul olla suured.
Balansseerimine
on tehnoloogiline operatsioon , mille käigus tasakaalustatakse rootor . Lubatud jääkdisbalansi mõõtühik on kas g.cm
või g.mm, sageli antakse ka g.mm/kg
st. lubatud jääkdisbalanss rootori massiühiku kohta. /Vt. lisaks
vastavate laboratoorsete tööde juhendeid/.
4. ptk. HAMMASÜLEKANDED
Liikumise
ülekandmiseks ja liikumisparameetrite teisendamiseks kasutatakse
hammas-, hõõrd-, rihm-, kett, kruviülekandeid.
Ülekannet
moodustavate rataste nurkkiiruste suhet nim. ülekandesuhteks.
Ülekandesuhe
, ...
(4.1)
kus - vedava ratta nurkkiirus,
- veetava ratta nurkkiirus.
Rööpsete telgede korral on arvesse võetud ülekandesuhte märk:
kus v
- välishambumiste arv. Näide 4.1
Ülekandearv
u on suurema ja väiksema ratta hammaste arvude suhe st.
. ...(4.2)
4.1. Hammasülekannete ja
-rataste liigitus
Liigituse
aluseks on pöörlemistelgede auhteline asend.
Rööpsete
telgede korral kasutatakse silinderhammasrattaid (joon. 5-7), kus
rataste suhtelise liikumise hetkeliste tsentrite poolt moodustatud
aksoidid on ringsilindrid
(Aksoid - vt. p. 4.2 alguses).
Lõikuvate
telgede puhul - koonushammasrattad (joon. 8-10).
Kiivaste
telgede korral (joon. 11-14) asendatakse vajalikud hüperboloidsed
aksoidid kahe silindriga (saadakse kruvirattad) või kahe koonusega
(saadakse hüpoidrattad).
4.2. Hambumisteooria
alged
Kiiruste
hetkelise tsentri P (joon. 16. a.) geomeetrilist kohta liikumatul tasapinnal nim.
paikseks tsentroidiks, tema geomeetrilist kohta liikuval, kehaga seotud tasapinnal nim. liikuvaks tsentroidiks e. aksoidiks.
Tasapinnalist liikumist saab käsitleda kui liikuva tsentroidi
libisemata veeremist paiksel tsentroidil. Kui valmistada vastavad
tsentroidid (joon. 16.b) ja panna nad teineteisel libisemata veerema,
siis sooritab liikuva tsentroidiga ühendatud keha meie poolt
soovitud liikumise. Hammasülekande sünteesimisel tuleb üle kanda
vedava võlli 1 pöörlev liikumine veetavale võllile 2 nii, et
ülekandesuhe
Märk
“-“ viitab välishambumisele.
Et
võllidevahelist suhtelist liikumist paremini mõista, kasutame nn.
liikumise pööramise võtet, mis seisneb kogu süsteemile
lisaliikumise “-2”
andmises. Paigalseisvale vaatlejale näib nüüd võll 2 liikumatuna. Võll 1 pöorleb nurkkiirusega 1
ümber telje O1
ja lisaks sellele tiirleb nurkkiirusega 2
ümber
paigalseisva telje O2.
Määrame
nüüd suhtelise liikumise tsentroidid. Selleks tuleb leida hetkeline
kiiruste tsenter ja otsida tema geomeetrilist kohta paigalseisval
tasapinnal T2
ja liikuval tasapinnal T1.
Vaatleme
punkti K kiirust vK,
mis koosneb kahest komponendist
v1K
ja v2K,
kus
kus
KO1
ja KO2 vt. joon. 16.
Niisugustest
komponentidest koosnev kiirus saab olla null ainult siis, kui
1)
komponendid v1K
ja v2K
on
vastassuunalised,
2) komponentide suurused on
võrdsed.
Esimene
tingimus on täidetud vaid punktis P,
mis asub nn. tsentritejoonel.
Teisest
tingimusest lähtudes peab
kust
. ...(a)
Seega
asub võllide suhtelise liikumise hetkeline kiiruste tsenter
tsentrijoonel ja jagab selle vastuproportsionaalselt nurkkiirustega
kaheks osaks.
Kui
, ...(b)
kus a
- võllide telgede vahe, siis on O1P
ja O2P
konstantsed st. kiiruste hetkelise tsentri asend tsentrijoonel on
püsiv. Seega on nii paikne kui liikuv tsentroid (aksoid) ringjooned,
mille raadiuses r1
ja r2
on pöördvõrdelised nurkkiirustega:
. ...(4.3)
Teiselt poolt
. ...(4.4)
Hambumise
teoorias nim. aksoide algringjoonteks.
Hetkelist kiiruste tsentrit P nim. hambumispooluseks.
Seega
puutuvad
algringjooned
teineteist hambumispooluses P ja veerevad teineteisel libisemata (joon. 17).
Sisehambumise
korral
...(4.4’)
. ...(4.3’)
Nurkkiirus
ümber kiiruse hetkelise tsentri
Ratta
1 punkti B kiirus ratta 2 suhtes (libisemiskiirus)
(vt. joon. 18) ...(c)
Olgu
ratas 1 varustatud hammastega, mille profiiliks on kõver
1
(joon. 19) ja ratas 2 hammastega, mille profiiliks on 2.
Valemi c põhjal on punkti Y kiirus kontaktpunktis
Et
säiluks normaalne kontakt peab kiirus olema suunatud piki
kontaktpunktis profiilidele tõmmatud ühist puutujat t-t. Seega peab
kontaktpunkti Y ham-bumispoolusega P ühendav sirge olema suunatud
piki profiilide ühist normaali n-n.
Ülaltoodu
põhjal võib formuleerida hambumise
põhiteoreemi:
Pöörleva
liikumise ülekandmiseks konstantse ülekandeteguriga peavad
kasutatavad hambaprofiilid olema niisugused, et nende kontaktpunktis
tõmmatud ühine normaal läbitaks alati tsentritejoonel liikumatult
asuva hambumispooluse.
Hambumise
protsessis muutub pidevalt kontaktpunkti Y asend ka liikumatul
tasapinnal. Kontaktpunkti geomeetrilist kohta liikumatul tasapinnal
nim. hambumissirgeks.
4.3. Sirghammastega
silinderülekannete geomeetria
4.3.1. Terminoloogia
Joon.
20. a) 1 - ratta korpus, 2 - hammasvöö, 3 - hammas, 4 - hambavahe;
b) 5 - jalgadepind, 6 - peadepind, 7 - hambatald, 8 - hambalagi;
c) 9 - pea(külg)pind, 10 - siirdepind;
d) 11 - jaotuspind, 12 - jaotusjalg, 13 - jaotuspea, 14 -
jaotusjoon.
Hammasratta ühistelgne
pind on iga pöördepind, mille telg ühtib ratta teljega.
Hammasratta
jalgadepind
(pos.5) on hambaid ratta korpusest eraldav ühistelgne pind.
Hammasratta
peadepind (pos.6) on hambaid rattakerest kaugemast küljest piirav ühistelgne pind.
Hambale
kuuluvat peadepinna osa nim. hambalaeks
(pos.8), jalgadepinnaga ühtivat hamba pinda hambatallaks
(pos.7).
Hamba
peapind
(pos.9) on
ulatuselt
valdav, teoreetilise pinnaga ühtiv hamba külgpinna osa.
Hamba
siirdepind
(pos.10) on külgpinna osa, mis ühendab hamba peapinda
jalgadepinnaga.
Hammasratta
jaotuspind
(pos.11) on hammaste elementide ja mõõtmete määramisel aluseks
võetav ühistelgne pind (silinderratastel jaotussilinder).
Hamba
jaotusjalg (pos.12)
on hammasratta jaotus- ja jalgadepinna vahel paiknev hambaosa,
jaotuspea
(pos.13) asub jaotus- ja peadepinna vahel.
Jaotushambajoon
(pos.14) (jaotusjoon) tekib hamba peapinna (täpsemini nimipinna) ja
jaotuspinna lõikamisel. (Hamba nimipind on peapind, millest lähtudes
arvestatakse töötlushälbed).
Joonisel
21 on näidatud hamba külgpinnad ABB’A’ ja CDD’C’.
Hamba
(kogu)kõrgus h on radiaalne kaugus peade - ja jalgadesilindri vahel,
kusjuures
h
= ha
+ hf ,
kus
ha
- hamba jaotuspea kõrgus, hf
- hamba jaotusjala kõrgus.
Samanimeliste
naaberprofiilide vahelist kaugust jaotusringjoone kaarel nim.
jaotusringsammuks p. Kui ratta hammaste arv on z, siis
, …(a)
kus d
- jaotusringjoone läbimõõt.
Seosest
(a) tulenevalt on
, …(4.5)
kus m
- jaotusringmoodul
ja
d
= m .
z . …(4.6)
Moodulite
väärtused millimeetrites on määratud standarditega (vt. joon.
31).
Hammasrataste
mõõtmed antakse mooduli kordsetena (moodul on hammasrataste
mastaabitegur). Nii on
jne. (vaata joon. 31)
kus - hambapea kõrguse tegur,
- hambajala kõrguse tegur.
Naaberhammaste
sümmeetriatelgede vahelist nurka nim. nurksammuks ,
kusjuures
Hammast piiravate erinimeliste profiilide vahelist kaugust jaotusringjoone
kaarel nim. hamba jaotusringpaksuseks
s. Niisamuti määratletakse hamba paksusi ka teistel ringjoontel (näiteks
peaderingpaksus
sa).
Hambavahe
ringlaiused:
hambavahe
jaotusringlaius e
hambavahe
peaderinglaius ea
jne.
Kuna
hammasrataste geomeetria arvutamisel lähtutakse külglõtkuta
hambumisest, on
Paisumisvahe ning määrdekihile vajaliku ruumi tõttu peab tegelikult s1
2.
Profiilidevahelise ringkülglõtku
jt
(vt. joon. 22) saamiseks antakse hammasratta joonisel hamba
nimipaksuse mõlemad piirhälbed negatiivsed [eraldi joon.].
Ühisnormaali
n-n sihis mõõdetavat lõtku nim. normaalkülglõtkuks jn.
Ratta
peaderingjoone ja vastasratta jalgaderingjoone vahelist
radiaalkaugust nim. radiaallõtkuks c.
Kahe hambuva ratta peaderingjoonte vahele jäävat telgedevahelise
joone lõiku nim. hambumissügavuseks h.
4.3.2. Ringjoone evolvent
Ringjoone
evolvendiks nim.
kõveraid, mida kujundavad ringjoonel libisemata veereva puutuja kõik
punktid (joon. 23).
Ringjoont ,
millel puutuja libisemata veereb , nim. hambumise teoorias
alusringjooneks.
Tema raadiust tähistatakse - rb,
läbimõõtu - db.
Evolvendi
omadused:
Ühe alusrinjoone evolvendid on omavahel kongruentsed (ühitatavad liikumise abil). Seega on evolvent täielikult määratud alusringjoone raadiusega rb ja alguspunktiga E0.
Et kujundav sirge veereb alusringjoonel libisemata, siis
jne.
3. Evolvendi kõverusraadiused
võrduvad alusringjoone puutuja lõikudega, mis paiknevad evolvendi
ja alusringjoone vahel:
jne.
Punktid
N1,
N2,
N3
jne on seega evolvendi kõverustsentrid. Alusringjoon osutub
evolvendi kõverustsentrite geomeetriliseks kohaks e. evoluudiks.
Evolvendi
parameetriliste võrrandite polaarkoordinaatides tuletamiseks vt.
joonist 24. Parameetriteks on profiilinurk y
evolvendi jooksvas punktis Y
asuva puutuja -
ja sellesse punkti viiva raadiusvektori OY
= ry
vahel. (Et puutuja - on paralleelne raadiusega ONy
= rb, siis ka nurk
YONy
= y)
.
Evolvendi
raadiusvektori moodul (vt. kolmnurka YONy
)
. …(4.7)
Polaarnurga
Qy
(hammasrataste
korral nim. evolventnurgaks)
saab määrata seosest
kust
Funktsiooni
(tan
- )
nim.
evolventfunktsiooniks ja tähistatakse
invy
(involuut y),
st
invy
=
. …(4.8)
Nurka
nim. laotusnurgaks
.
4.3.3. Evolventhambumise
kujundamine
Käsitleme
nihutuseta
evolventhambumise
kujundamist, kus jaotus- ja algringjoonte läbimõõdud on võrdsed
st.
ja
Telgedevaheline
jaotuskaugus
, …(4.9)
kuna
algringjooned puutuvad teineteist hambumispooluses P (vt. joon. 26).
Üldjuhul tähistatakse telgedevahelist kaugust, kui aw.
Nihutuseta rattal on aw
= a.
Joonestame
algringjoontele puutuja -
ja sellega hambumisnurga
moodustava hambumissirge n-n
(sirgete tähised puuduvad joonisel 26). Nihutuseta ratastel on
= ,
kus
-
lähtekontuuri (vt.
järgmises punktis)
profiilinurk.
Seepeale tõmmatakse tsentritest O1
ja O2
hambumissirge ristsirged; saadakse punktid N1
ja N2.
Evolventide
kujundamiseks vajalike alusringjoonte
raadiusteks võetakse pikkused ON1
= rb1
ja ON2
= rb2.
Alusringjoonte
läbimõõdud
. …(4.10)
Kirjeldatud
viisil saadud alusringjoonte evolvendid rahuldavad hambumise
põhiteoreemi nõudeid.
Nihutuseta
rataste jaotuspeade kõrgused
ja
peadeläbimõõdud
(vt.
ka valemit 4.6).
Hambajalad peavad vastasratta hambapeadest olema radiaallõtku c
= c* .
m võrra kõrgemad.
Seega
ja
jalgadeläbimõõdud
Pärast
peaderingjoonte konstrueerimist on võimalik määrata nii
hambumissirge
kui ka hambaprofiilide
toimivaid, aktiivseid osi
st. piirkondi, kus hambad tegelikult kokku puutuvad. Kuna hambad
lõpevad peaderingjoonel, siis ei saa olla kokkupuudet hammaste vahel
väljaspool hambumissirge
aktiivosa - lõiku
K1K2.
Kandnud need punktid tsentritest O1
ja O2
tõmmatud
ringjoonekaartega vastavatele profiilidele, saame hammaste
profiilide aktiivosade
alumised punktid Kp1
ja Kp2
(joonisel 27 need punktid puuduvad).
Hamba
profiil on evolventne piirpunktini L
(vastav hamba piirkõrgus he),
kus ta läheb üle pingete kontsentratsiooni leevendavale
siirdekõverale
(vt. joon. 28).
4.3.4. Hammaslati
hammaste profiil. Lähtekontuur.
Töökontuur
Hammaslatti
vaadeldakse kui silinderhammasratta sektorit, mille silindrite
läbimõõdud on lõpmata suured. Silinderpinnad on seega muutunud
rööptasanditeks ja neile vastavad ühiskeskmega ringjooned
rööpsirgeteks (joon. 29.a). Alusringjoone raadiuse rb
kasvades (joon. 30)
suureneb evolventprofiili kõverusraadius .
Kui rb
,
siis ka
.
Seega
on hammaslati hambaprofiiliks sirge. Seda asjaolu kasutatakse
omavahel korrektselt hambuvate evolventrataste perekonna
kindlaksmääramiseks, selleks piisab hammaslati kuju ehk nn.
lähtekontuuri
etteandmisest (joon. 29.b). Lähtekontuur on nominaalse hammaslati
profiil jaotuspinna risttasandis (silinderratastel vastab sellele
otslõige).
Hambalõikeriistade
geomeetria alus on töökontuur
(joon. 31), mis kujult ühtib lähtekontuuriga, erinedes sellest
ainult hambapea kõrguse poolest. Viimast suurendatakse radiaallõtku
c*.m
võrra selleks, et lõigatavatel hammastel tekiks nõutav jalakõrgus
.
Lähtekontuuri
peadesirge ja töökontuuri vaheline lõtk säilib, vältimaks
hammaste lõikamisel kontakti tööriista hambavahe põhja ja tooriku
peadesilindri vahel. Seega töökontuuri hamba kogukõrgus
ja tema jaotussirge poolitab selle.
4.3.5. Hammaste lõikamine
Kopeerimismeetod, kus lõikeinstrumentidena kasutatakse kas ketas - või sõrmmoodulfreese (joon. 32, 33, 34). Kuna hambavahe kuju sõltub hammasratta hammaste arvust (alusringjoone raadiusest), on ühe ja sama mooduliga hammasrataste lõikamiseks vaja eraldi freesi erineva hammaste arvu korral. Praktikas ei ole see nõue realiseeritav. Tegelikult valmistatakse iga mooduli jaoks komplekt freese, kusjuures igat freesi sellest komplektist kasutatakse teatud hammaste arvu vahemikus. Frees lõikab õige kujuga hambavahe vaid hammaste arvu vahemiku minimaalsel väärtusel.
Rullumismeetod, kus lõikeinstrumentidena kasutatakse hambatõukurit (joon. 35), latt -tõukurit või tigufreesi. Hambapinna profiiliks kujuneb lõikeriista lõikeserva järjestikuste suhteliste asendite mähisjoon.
4.3.6. Hambapinna
modifitseerimine
Raskelt koormatud ja kiire välishammastega silinderülekande töövõime suurendamiseks kasutatakse lähtekontuuri (joon. 46), mille hambapea
profiil on modifitseeritud . Pea modifitseerimine vähendab
dünaamilisi lööke. Modifitseerimiskõrguse tegur
ja modifitseerimis-sügavuse tegur .
Kasutusel
on veel hambapea paksendiga nn. protuberantsiga töökontuur. Selle
järgi profileeritud lõikeriist lõikab hammastele jalaossa
sisendsiirde,
mis loob head tingimused hammaste viimistlemiseks (šeevertöötluseks
või termotöötluse järgseks lihvimiseks).
Protuberantsiga
töökontuur koosneb kolmest sirgest osast (profiilinurkadega o,
MO,
KO),
mis lõikavad vastavalt hamba profiili kolme erinevat evolventosa:
peaprofiili, modifitseeritud evolventosa ja nürimisprofiili.
4.3.7. Nihutusega
hammasrattad ja ülekanded
Tööpingi
poolt lõikeriistale ja toorikule antava rullumisliikumise
tõttu tekib hammaste lõikamisel pinkhambumine. Kui tööriista
lõikeserv on profileeritud töökontuurikohase hammaslatina
(tigufrees või latt-tõukuri puhul), siis pinkhambumine
hammasrataste lõikamise lõppjärgus kujutab endast hambumist
evolventratta ja hammaslati vahel (vt. joon. 47, 48.a, 49.a, 50.a).
Nihutuseta
hammasrataste
lõikamise lõppjärgus puutub töökontuuri
jaotussirge ratta jaotusringjoont
veeredes sellel libisemata. Ratta
jaotusringjoon on
seega pinkhambumise
algringjoon ja
töökontuuri
jaotussirge - algsirge.
Seega nimetatakse hammasratta jaotusringjooneks
seda ringjoont, millel ringsamm võrdub lõikeriista sammuga.
Lõigatava
ratta hammaste jaotusringpaksus s
ja hambavahe jaotusringlaius e
on võrdsed:
Kui
koostada säärastest ratastest tihe, külglõtkuta hambumine (kõik
geomeetriaarvutused tehakse, eeldades külglõtkuta hambumist),
puutuvad jaotusringjooned teineteist hambumispooluses, jäädes
algringjoonteks ka rataste hambumises (vt. joon. 48).
Telgedevaheline
jaotuskaugus
Hambumisnurk
.
Kui
lõikeriista jaotussirget ei viida lõikamise lõppjärgus lõigatava
ratta jaotusringjoone puutujaks (joon. 47.b, 49.a), vaid jäetakse
sellest eemale, kaugusel x.m,
saadakse positiivse
nihutusega hammasratas
(plussratas). Lõigatava ratta jaotusringjoonel 1 veereb libisemata
töökontuuri jaotussirgega 2 rööpne algsirge 3. Lõikeriista
hammaste samm p on algsirgel sama mis jaotussirgel, kuid lõikeriista hambapaksus
algsirgel on kahanenud pikkuse 2.x.m.tg võrra. Seega lõigatava ratta jaotusringvahe
ja
jaotusringpaksus
. …(4.10)
Pinkhambumise
hambumisnurk on määratud töökontuuri profiilinurgaga
ja ei sõltu nihutusest. Seega ei sõltu nihutuse suurusest ei
lõigatava ratta alusringjoone raadius ega evolvendi kuju.
Positiivselt
nihutatud rataste hambumise skeem on joonisel 49.b. Paksenenud
hammaste ja ahenenud hambavahede tõttu tekib hambumine juba
olukorras, kus jaotusringjooned (mille läbimõõt d
= m . z
nihutusest ei sõltu) on teineteisest pikkuse y.m
võrra eemal. Selle tagajärjel suureneb ülekande telgede vahe a
võrreldes jaotuskaugusega a.
Kuna
ja
siis
. …(4.11)
Tiheda
hambumisega määratud telgedevahe tegelik suurenemine (omastatud
nihutus)
kus - summaarne nihutustegur.
Vahet
nim. omastamata nihutuseks.
Nihutuse
osaline omastamatajätt on tingitud sellest, et telgedevahe määrab
kindlaks külglõtkuta tööhambumise teke, mitte pinkhambumises
kasutatavad nihutused.
Telgede
vahe muutumise tõttu ei ühti hambumispoolust P läbivad
algringjooned enam jaotusringjoontega.
Kuna
ja ,
siis
Siit
…(4.12)
ja
Jalgade-
ja peaderingjoonte läbimõõdud
…(4.13)
Peaderingjoone
läbimõõdu arvutamisel lähtutakse välishambumise korral
tingimusest, et ülekandes oleks radiaallõtk c*.m
.
Hammaste
kõrgus
Negatiivsel
nihutusel (joon. 50) võetakse nihutus x.m
märgiga “-“.
Positiivse
nihutuse korral (joon. 51) paikneb hambaprofiil evolvendi
alusringjoonest kaugemal, kus kõverusraadiused on suuremad.
Säärastes hammastes tekivad väiksemad kontaktpinged. Pakseneb ka
hambajalg ja muutub sujuvamaks siirdekõver. Saab vältida
interferentsi (vt. eespool p. 4.3.9).
Teiselt
poolt väheneb hamba normaalpaksus lagipinnal.
Muutused
negatiivselt nihutatud rataste ja hambumise omadustes on vastupidised
positiivselt nihutatute omadele.
4.3.8. Nihutusega
hammasrataste põhiparameetrite arvutus
Seost
4.10 võib kasutada siis, kui on eelnevalt teada ülekande
hambumisnurk. Hambumisnurka on võimalik määrata tingimustest, et
algringjooned veerevad teineteisel libisemata. Järelikult peab ühe
ratta hamba paksus algringjoonel olema võrdne hambavahe laiusega
teise ratta algringjoonel st.
või . …(a)
Alguses
määrame nihutusega x.m
lõigatud hammasratta hamba paksuse ja hambavahe laiuse meelevaldse
raadiusega ry
ringi kaarel
(joon. 55).
Jooniselt
saame, et
kus
- pool hamba nurkpaksust jaotusringjoonel
y
- pool hamba nurkpaksust ringjoonel raadiusega ry
.
Asendades
hamba nurkpaksuse vastava kaare pikkusega
ja
kasutades seoseid 4.6 ja 4.10 saab pärast teisendust valemi hamba
paksuse määramiseks
…(4.14)
Analoogilisel
teel määratakse seos hambavahe laiuse arvutamiseks
…(b)
Seoste
4.14 ja b põhjal avaldatakse hamba paksus väiksema ratta
algringjoonel s1
(ry=r1,
z=z1,
x=x1,
y=)
ja hambavahe laius suurema ratta algringjoonel e2
(ey=e2,
ry=r2,
z=z2,
x=x2,
y=).
Asendades
saadud seosed avaldisse a ning kasutades seost 4.7 kujul
(ry=r
, y=)saame
pärast teisendust silindriliste
hammasrataste evolventülekande hambumise võrrandi,
mis seob hambumisnurga
, nihutustegurite summa
ja rataste hammaste arvud z1
ja z2:
…4.15
4.3.9. Piirangud
hammasülekannete sünteesimisel.
Kvaliteedinäitajad
Välishammaste
lõikamisel lattlõikeriistaga (tigufreesi, latt-tõukuriga) on 3
piirangut: jalgalõige, hamba teravnemine ja hamba töötluspuue.
Jalgalõige
tekib, kui lõigatava ratta hammaste arv zxmin,
puutub siirdekõver sujuvalt evolventi profiili piirpunktis
L (vt. joon. 58.a).
Kui x=xmin
(e=0,
vt. joon. 59), puutub siirdekõver evolventi alusringjoonel (dl=db
vt. joon. 58.b), kus dl
- profiili
piirpunkti läbimõõt.
Kui
x

















































































































Kõik kommentaarid