Reduktori projekteerimise näide
1. Mootori võimsuse arvutamine ja mootori valik
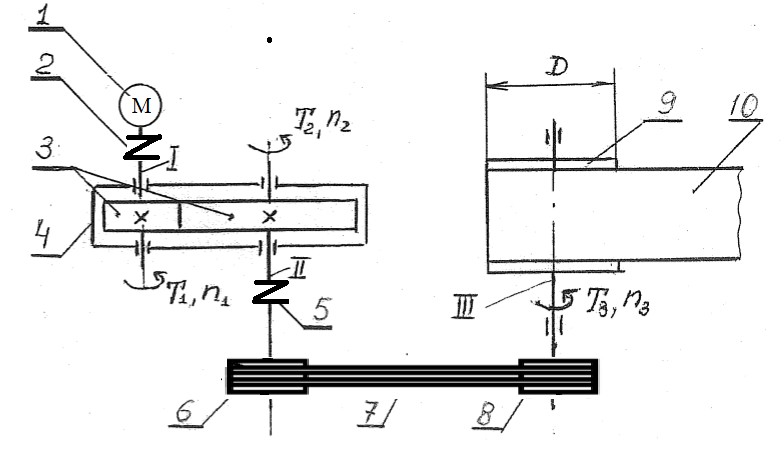
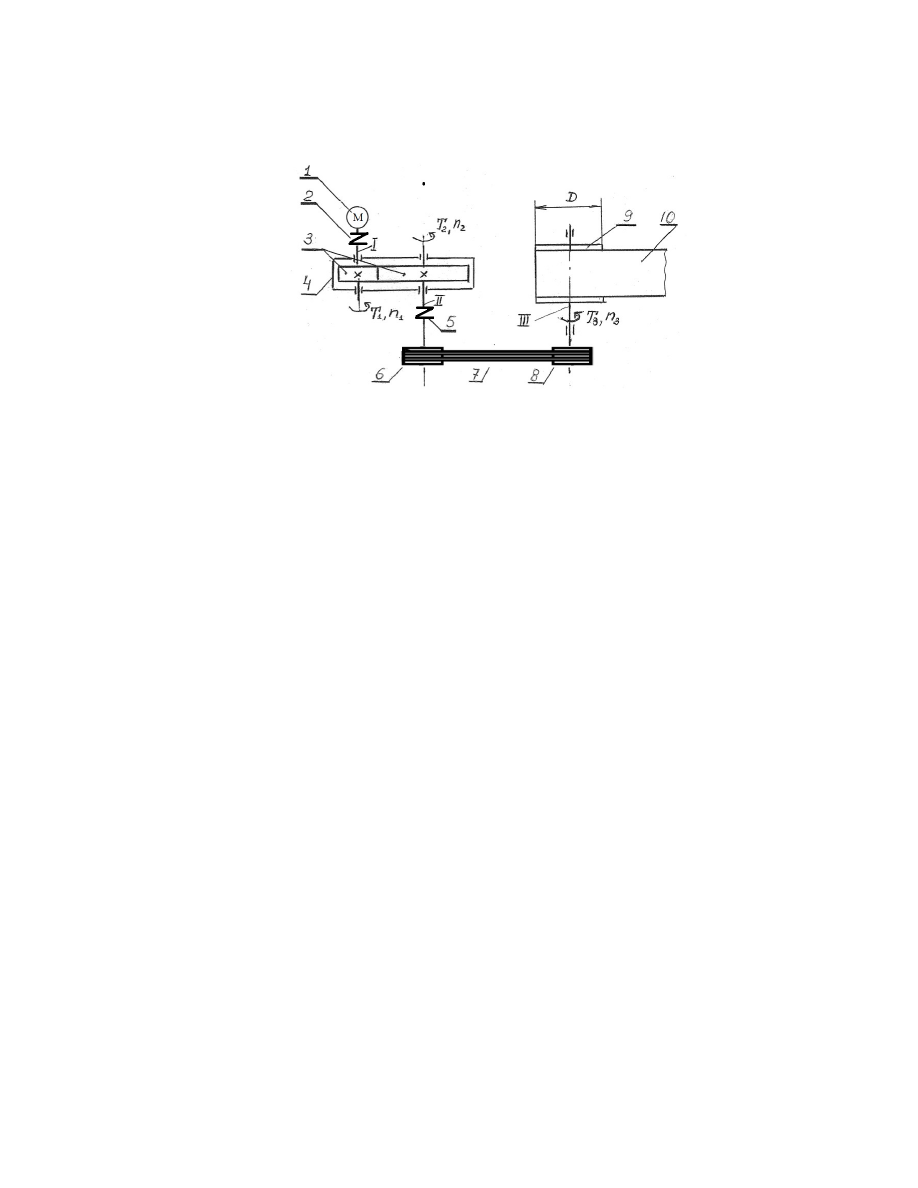
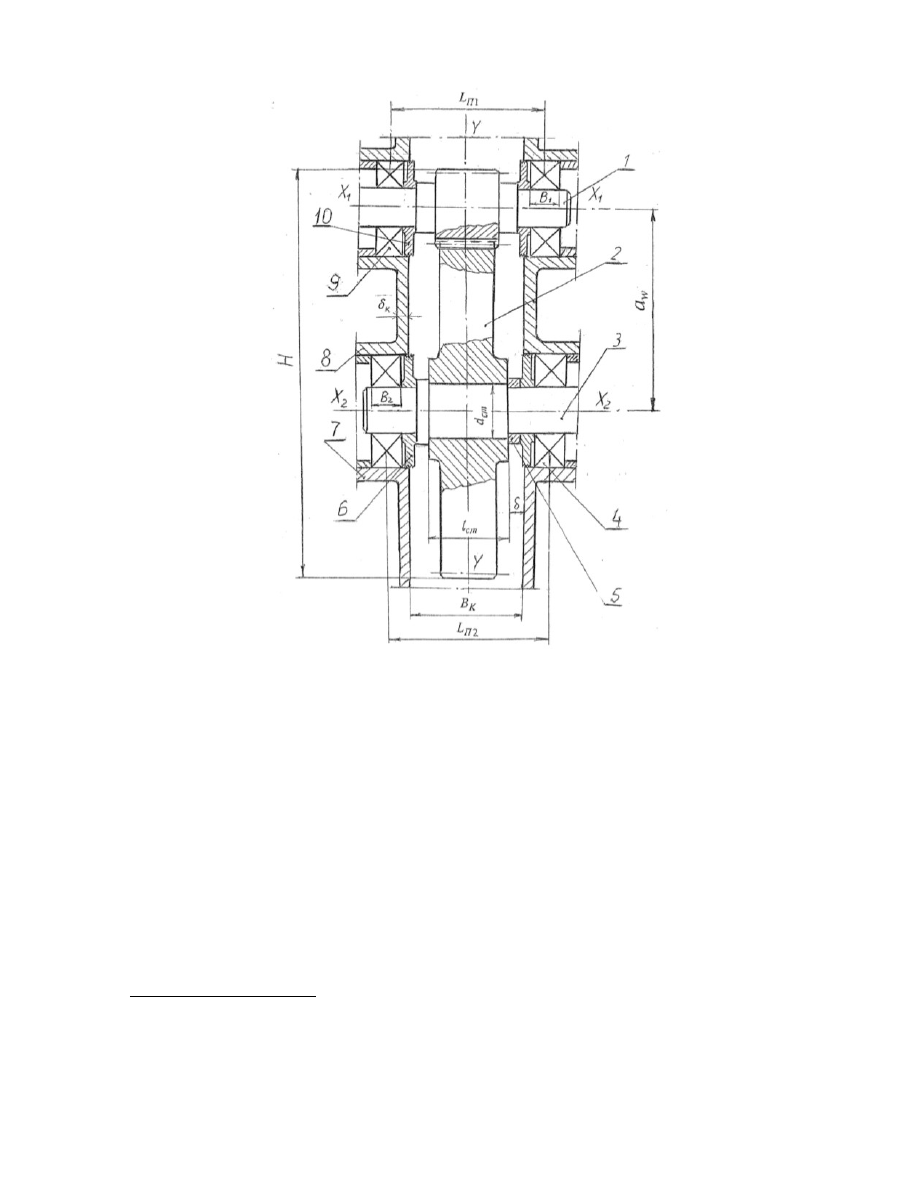
Joon. 1. Konveieri trumli ajami kinemaatikaskeem
1 – mootor; 2 – sidur; 3 – hammasrattad (hammasülekanne) ; 4 –
reduktori korpus; 5 – sidur; 6 – vedav rihmaratas; 7 – rihm; 8 – veetav
rihmaratas; 9 – konveieri trummel; 10 – konveieri lint.
Pöördemomendid ja pöörlemissagedused võllidel:
Võll I - Т1 ja n1;
Võll II - T2 ja n2;
Võll III ehk töövõll T3 ja n3.
Lähteandmed mootori valikuks: F = 3,3 kN, v = 2 m/s, D = 0,35 m, kus F on
lintkonveieri koormus; v on lindi liikumise kiirus; D konveieri trumli läbimõõt.
Pöördemoment töövõllil ehk III võllil: T3 = FD/ 2 = 3,3 ⋅ 103 ⋅ 0,35/ 2 = 578 Nm.
Trumli pöörlemissagedus: n3 = 60 v /πD = 60 D = 60 ⋅ 2/πD = 60 ⋅0,35 =109,2 1/min.
Trumli nurkkiirus ω3 = 2πD = 60 n / 60 = 11,43 rad/s
Kasulik võimsus võllil III: P3 = T3 ⋅ ω3 = 578 ⋅ 11,43 = 6,6 kW
Ajami kasutegur η = 0,98 ⋅ 0,982 ⋅ 0,96 ⋅ 0,993= 0,82, kus
η hammasülekanne = 0,98
η sidur = 0,98, kahe siduri korral 0,982
η rihmülekanne = 0,96
η laagripaar = 0,99 ja kolme laagripaari korral 0,993
1
Juhul kui on tegemist kettülekandega, siis selle kasutegur on 0,92.
Mootori nõutud võimsus:
Pmootor = P3/ η = 6,6/0,82 = 8,1 kW
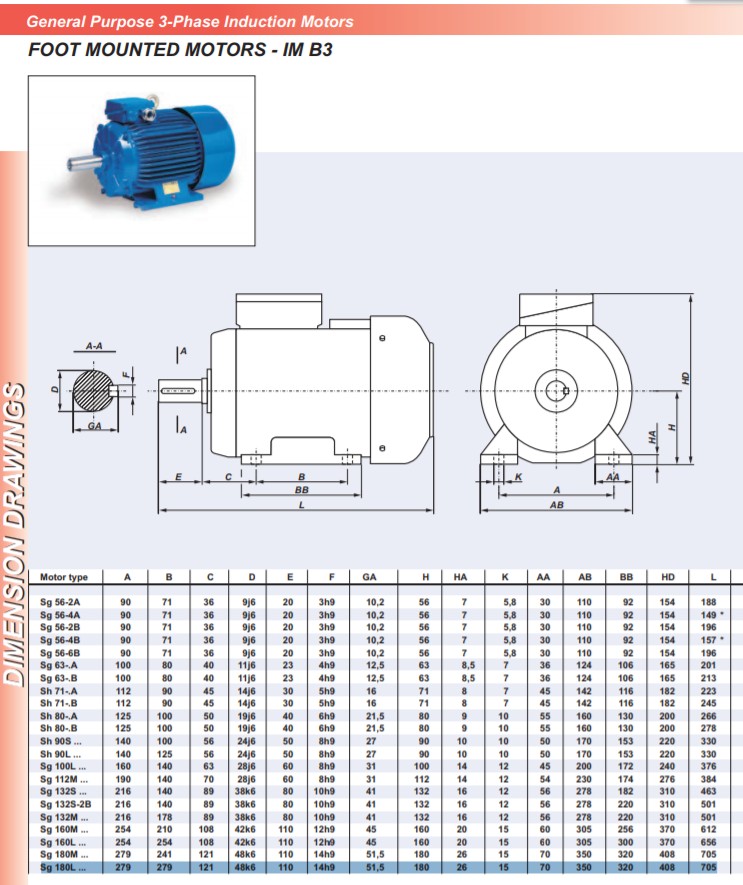
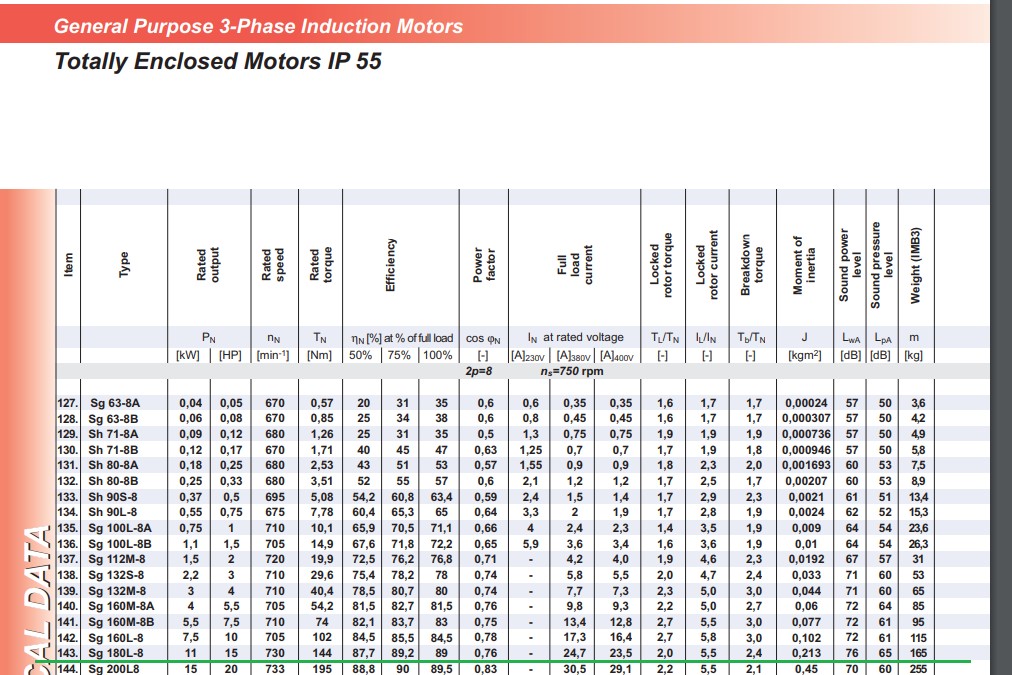
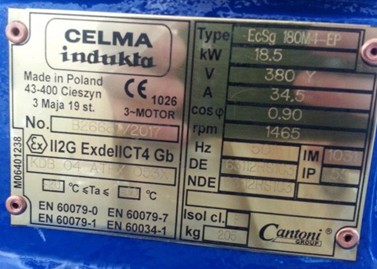
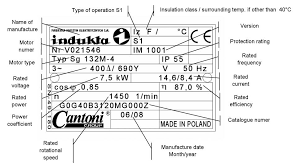
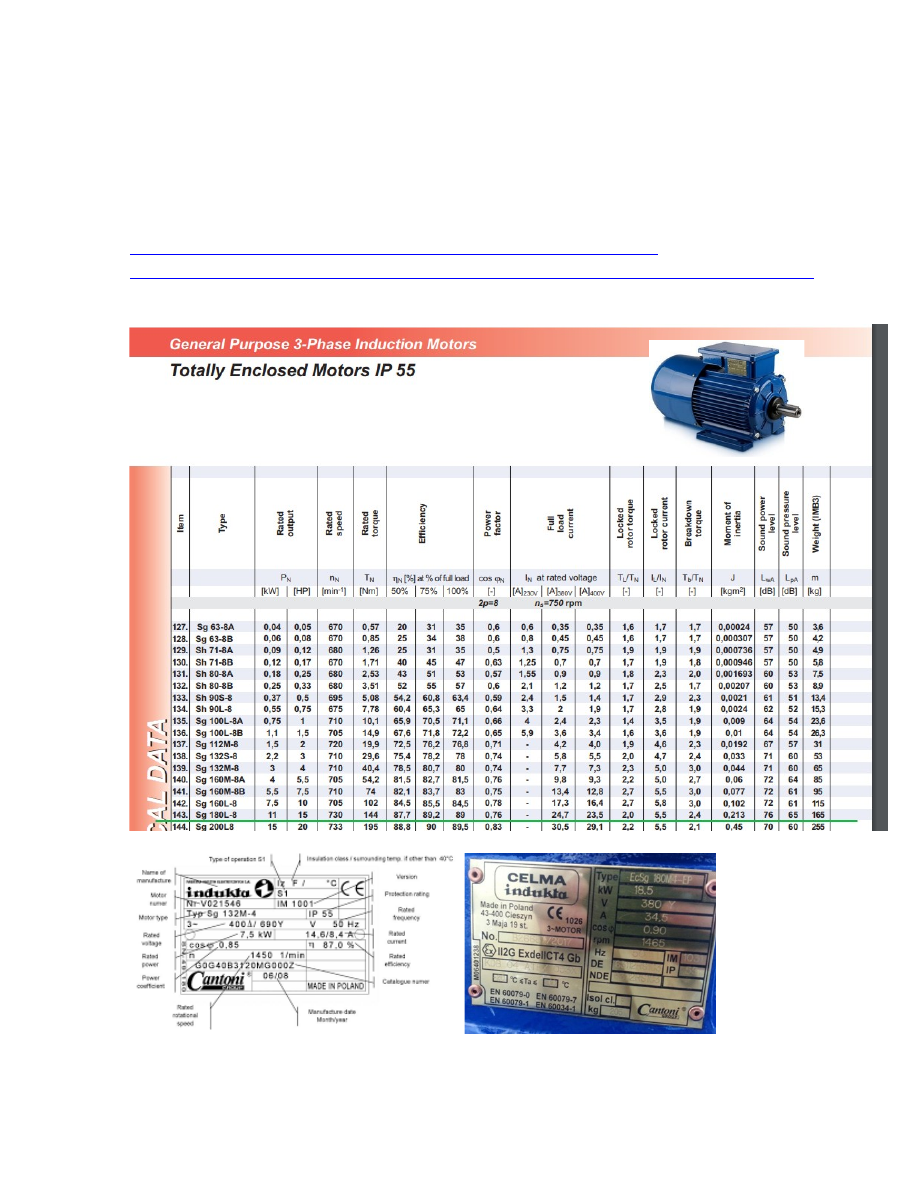
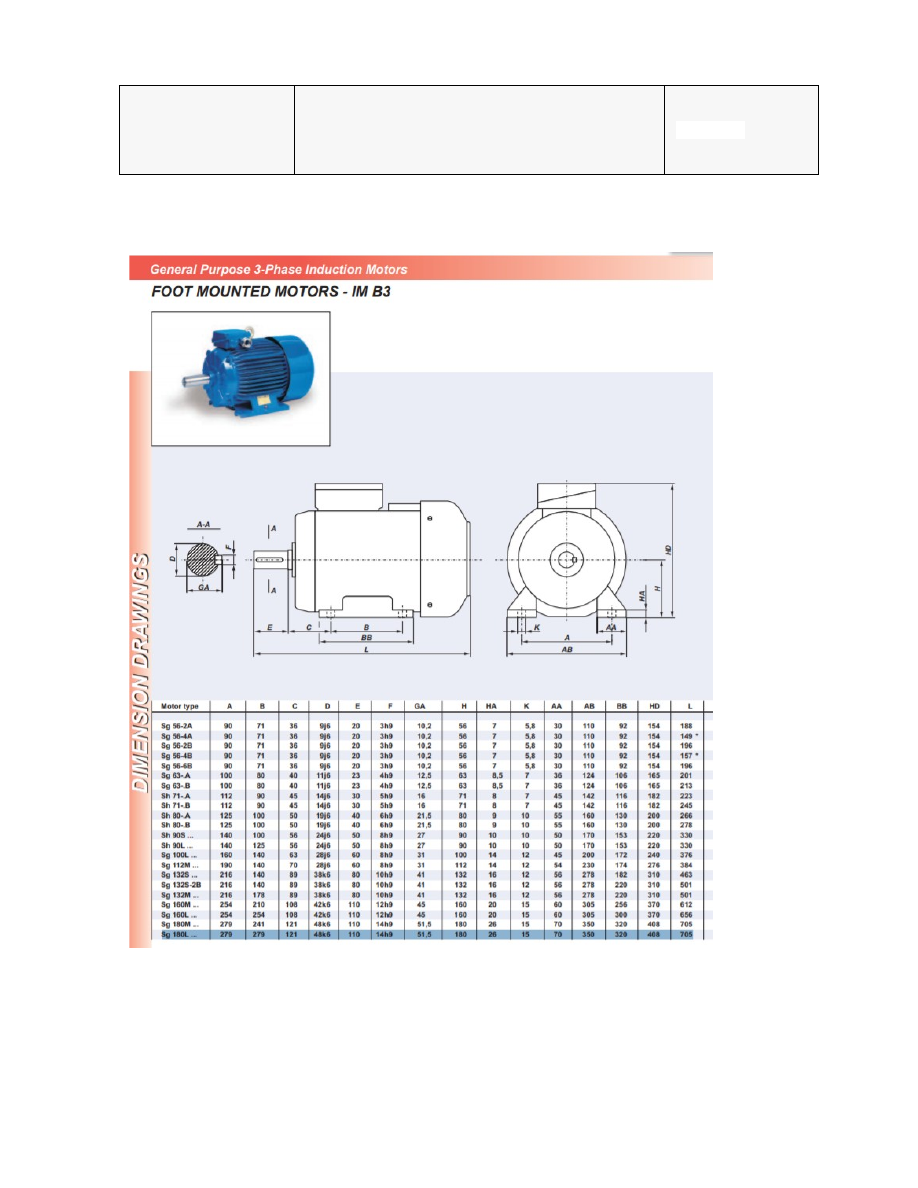
Valime välja 3 faasilise asünkroonmootori (Three-Phase Induction Motors): Sg
180L-8, mille võimsus on Pmootor = 11 kW ja pöörlemissagedus nmootor= 730 1/min.
https://energiatehnika.ee/product/cantoni-elektrimootorid/
http://www.totalhydraulics.nl/wp-content/uploads/2017/02/4100_kolmer.pdf
Tabel 1. Cantoni mootorid.
Joon.2. Cantoni firma mootorite sildi näiteid.
2
2. Pöörlemissageduste ja pöördemomentide arvutamine mehhanismi
võllidel
Kogu mehhanismi ülekandearv: ukogu = nmootor / n3 = 730 / 109,2 = 6,685
Teiselt poolt ukogu = uhammasülekanne ⋅ urihmülekanne . Kui võtta hammasülekande
ülekandearvuks 4
u hammasülekanne = 4, siis urihmülekanne = 6,685/4= 1,67 ehk ümardades saadakse u
rihmülekanne
= 1,7.
Arvutatakse mehhanismi kogu ülekandearv ukogu = 4 ⋅ 1,7 = 6,8. Järelikult
pöörlemissagedus võllil III on n3 = 730/6,8 = 107,3 1/min. Arvutatakse
mehhanismi ülekandearvu viga:
δ% = (109,2 – 107,3)/109,2 = 1,73%, mis on lubatav (kuni 5% on lubatav).
Pöörlemissagedused ja pöördemomendid eri võllidel on toodud tabelis 2.
Tabel 2. Pöörlemissagedused ja pöördemomendid eri võllidel.
Võll I
Võll
II
Võll III
n, 1/min 730
182,
5
107,3
T, Nm
95,1
365,
1
578
kus pöörlemissagedused:
võllil I n1 = n mootor = 730 1/min
võllil II n2 = 730/4 = 182,5 1/min
võllil III n3 = 182,5/1,7 = 107,3 1/min
ja pöördemomendid:
võllil III T3= 578 Nm
võllil II T2 = 578/(1,7 ⋅0,96 ⋅ 0,99 ⋅ 0,98) = 365,1 Nm
võllil I T1 = 365,1/(4⋅ 0,992 ⋅ 0,98) = 95,1 Nm
NB! Võllidel mõjuvate pöördemomentide T1; T2; T3 arvutamsel
korrektsem lähtuda mootori pöördemomendi väärtusest! T1 = 144 Nm;
T2= 144 ⋅
4 ⋅
0,992 ⋅
0,98 = 553 Nm ja T3 = 553 ⋅
1,7 ⋅
0,96 ⋅
0,99 ⋅
0,98 =
893 Nm. Edaspidistes tugevusarvutustes lähtuda nende
pöördemomentide väärtustest.
3. Hammasratta mõõtmete, materjali valik ja painde- ning pindväsimuse
analüüs
3
Hammasratta materjaliks valitakse keskmiste tugevusomadustega teras C45E
EN10083.
Teras tuleb parendada, et tagada kõvadus HB300 veetav hammasratas võllil II ja
HB300 vedav hammasratas võllil I.
Üheastmelise reduktori ülekanne on kiirekäiguline, kuna vedava hammasratta
pöörlemissagedus on võrdne mootori pöörlemissagedusega ja lineaarne kiirus
vedaval hammasrattal on seega üle v=3 m/s. Seega hammasrattad tuleb
arvutada pind- ja paindeväsimusele.
Lähteandmed hammasülekande valikuks:
Määratakse sirghammastega hammasrataste mõõtmed kasutades järgmised
lähteandmed: pöördemoment reduktori väljundvõllil II T2 = 365,1 Nm (aw
arvutusvalemis võib võtta T2 ühikuks Nmm kui [σ]σ]]H ühikuks võtta MPa) ja
ülekandesuhe on 4.
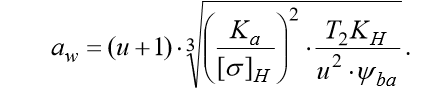
Valitakse hammasrataste tsentrite vahekauguseks aw = 190 mm.
Kus ligikaudse aw väärtuse saab arvutada kasutades valemi:
,
Kus u on hammasülekande ülekandesuhe; Ka on tegur, mis võtab arvesse
hammasratta tugevusnäitajad ja hammasülekande töörežiimi. Sirghammastega
hammasratastele Ka = 310; kaldhammastega hammasratastele Ka = 270;
ψba on
hamba laiust arvesse võttev tegur
ψba = b/aw ,
kus b on hammasratta laius; Sirghammastega hammasratastele
ψba = 0,125 …
0,25; kaldhammastega hammasratastele
ψba = 0,2 … 0,4; T2 (N·mm) on
hammasülekande väljundvõllil mõjuv pöördemoment; KH on koormuse tegur,
esialgses lähenduses võib võtta KH = 1,25. Hammasrataste materjali lubatav
kontaktpinge võtta vahemikus [σ]σ]]H = (380 – 520) MPa, mis vastab parendatud
süsinikterastele C35, C40, C45, C50 (konstruktsioonilised terased) ja keskmisele
töörežiimile.
4
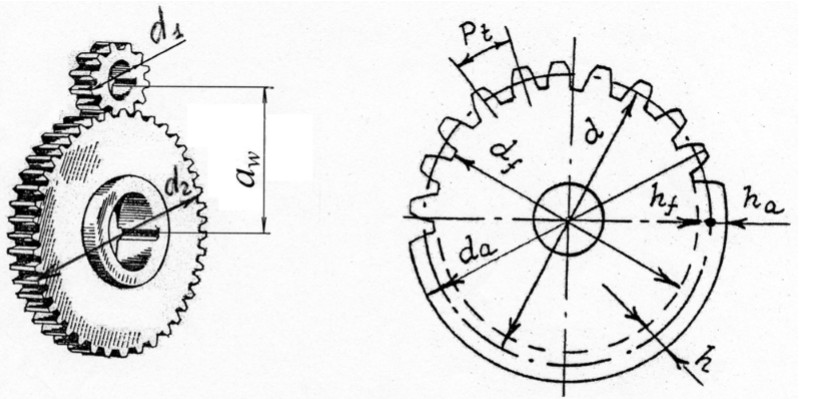
Joon. 3. Hammasülekande ja hammasratta parameetrid.
Tavaliselt määratakse hammasratta moodul lähtudes aw = 190 mm väärtusest:
m = (0,01 … 0,02) aw = (0,01 … 0,02) ⋅ 190 = (1,9 …3,8) mm, valitakse m = 3
mm.
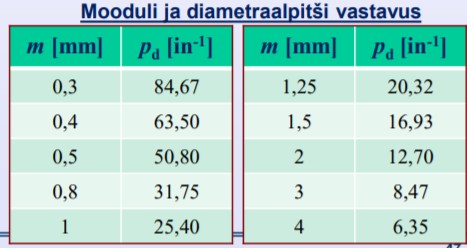
Joon. 4. Standardsete hammasrataste moodulite väärtused.
Vedava ehk sisendvõllil asuva hammasratta hammaste arvu määramine:
z1 = 2 aw / m(u+1) = 2 ⋅ 190 / 3 (4+1) = 25,33
Valitakse hammaste arvuks z1 = 26 ja z2 = z1⋅ u = 26 ⋅ 4 = 104.
5
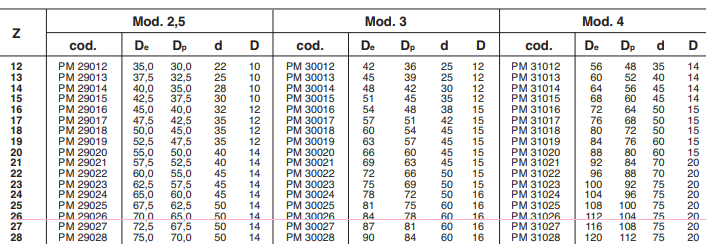
Arvutatakse teised hammasrataste parameetrid:
Väiksema ehk vedava hammasratta jaotusringjoone läbimõõt dw1 = z1 ⋅ m = 26 ⋅
3 = 78 mm
Suurema hammasratta ehk veetava hammasratta jaotusringjoone läbimõõt
dw2 = z2 ⋅ m = 104 ⋅ 3 = 312 mm. dw1 ja dw2 väärtused võib võtta ka
hammasrataste kataloogist.
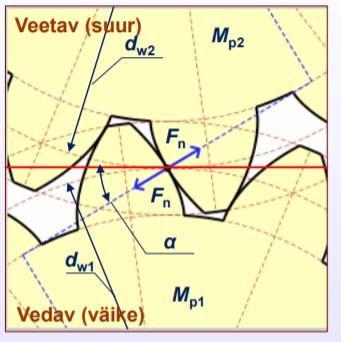
Joon . 5. Evolventprofiiliga hambumine.
NB! Arvutatakse uus hammasrataste lõplik vahekaugus
aw = (dw1 + dw2)/2 = (78 + 312)/2 = 195 mm
Teostatakse hammasülekande paindeväsimuse ja pindväsimuse analüüs.
Paindeväsimuse analüüs
Hammasratta materjal C45E (σ]y = ReH = 370 MPa,
σ]U = Rm = 600 MPa, σ]-1 = 275 MPa, τ-1 = 165 MPa).
Hammasratta pinna kõvadus HB300 (täiskarastus vm).
Hammasratta hamba laius b = 30 mm;
dw1 = 78 mm; dw2 = 312 mm; hammasratta moodul m = 3
(vt. Tabel 1).
Hamba profiili ümardusraadius rt = 0,6 mm.
Ülekantav pöördemoment T1 = 95,1 Nm.
Ülekantav pöördemoment T2 = 365,1 Nm.
Ülekandesuhe u=4; z1=26; z2=104; tegemist on suure/keskmise täpsusega
hammasratastega.
6
Rahulik koormus, joonkiirus hambumises alla v = 3 m/s, nõutav tööiga on 106
tsüklit.
Nõutav [σ]S] = 1,2 …1,5.
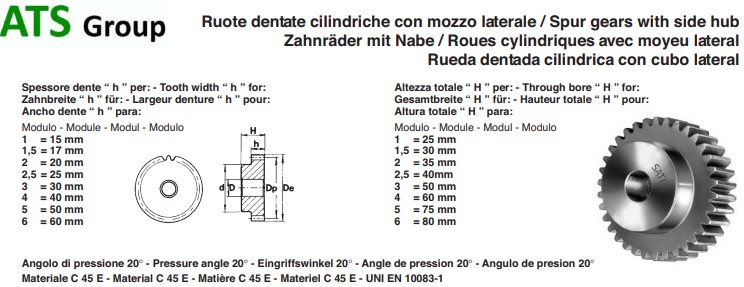
Tabel 3. Hammasratta kataloogi andmed. Hammasratta jaotusringjoone
jaotusläbimõõt dw1 on tähistatud kui Dp.
7
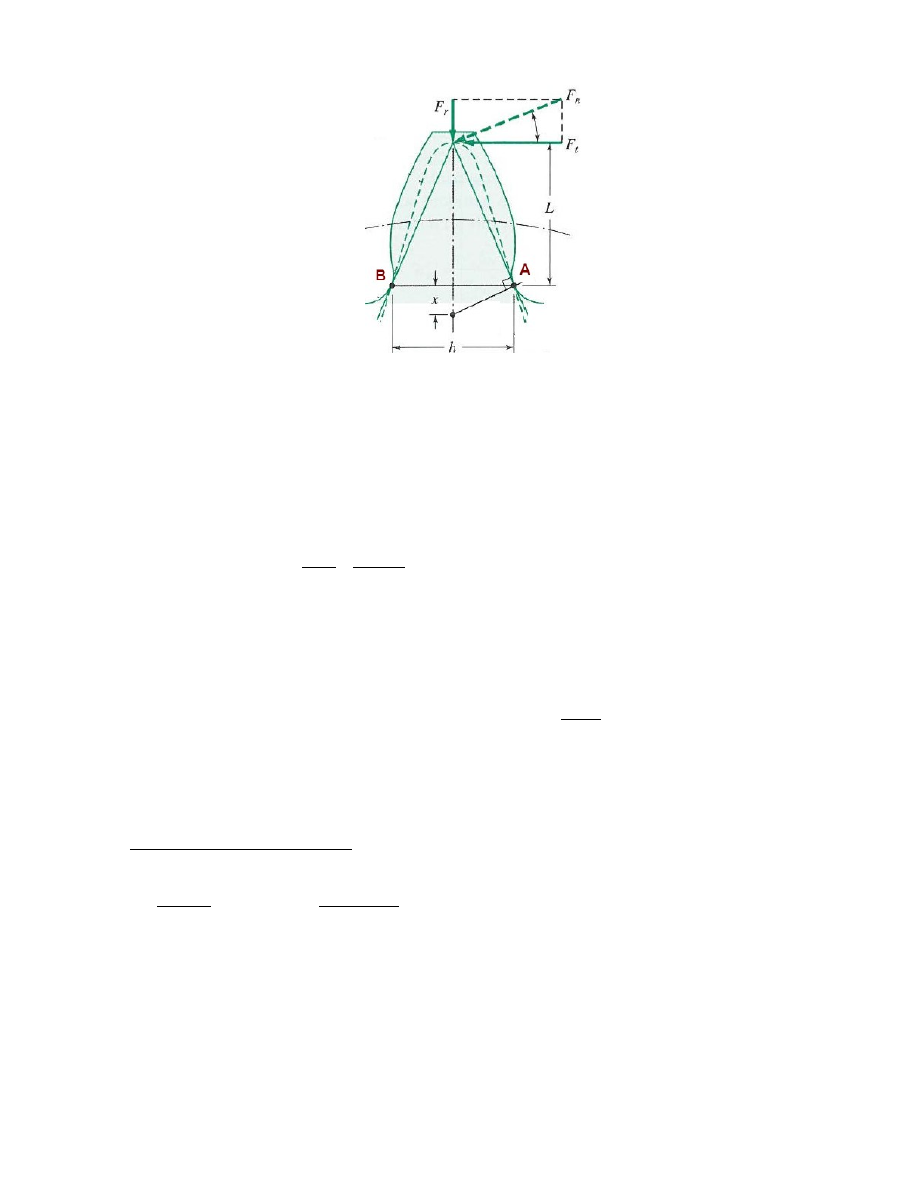
Joon. 6. Evolventprofiili lihtsustus.
Arvutatakse väikese hammasratta hambumise ringjõud Ft ja hamba
radiaalkoormus Fr :
Ringjõud Ft : Ft=
m
⋅ 2
d
w1
=
95,1
⋅2
0,078
=
2438,5N
Radiaaljõud Fr : - sirghammastega silindriliste hammasrataste korral
F
r= F t ⋅ tan α =2438,5 ⋅ tan 2 0 °= 887,5 N, kus α on hammasratta hambumisnurk
(α = 20°).
- kaldhammastega hammasratta korral
F
r =Ft⋅
tan α
cos β , kus β on hamba
kaldenurk mis võib varieeruda vahemikus 8 < β < 45°.
Radiaaljõud Fr = 887,5 N, ringjõud Ft = 2438,5 N
Paindeväsimuse analüüs
Hamba paindest tulenev ohtliku punkti tõmbepinge
σ =
F
t
b
⋅m⋅ J
K
a K v K m K I=
2438,5
30
⋅ 3⋅ 0,25
1,25
⋅1,3⋅1, 1⋅1=≈ 193,7 MPa, kus
Geomeetriategur J = Y/K võtab arvesse Lewis’e teguri Y ja
pingekontsentratsiooniteguri K.
8
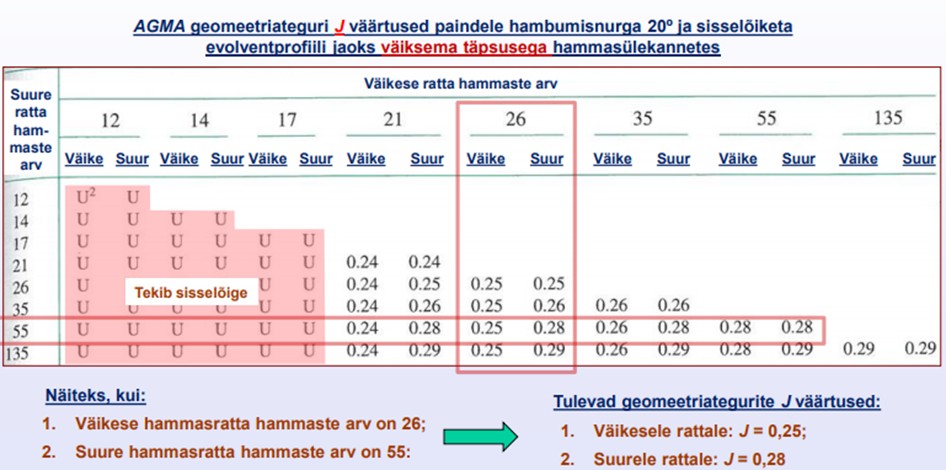
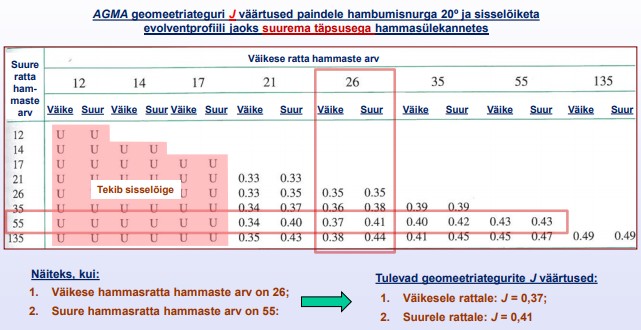
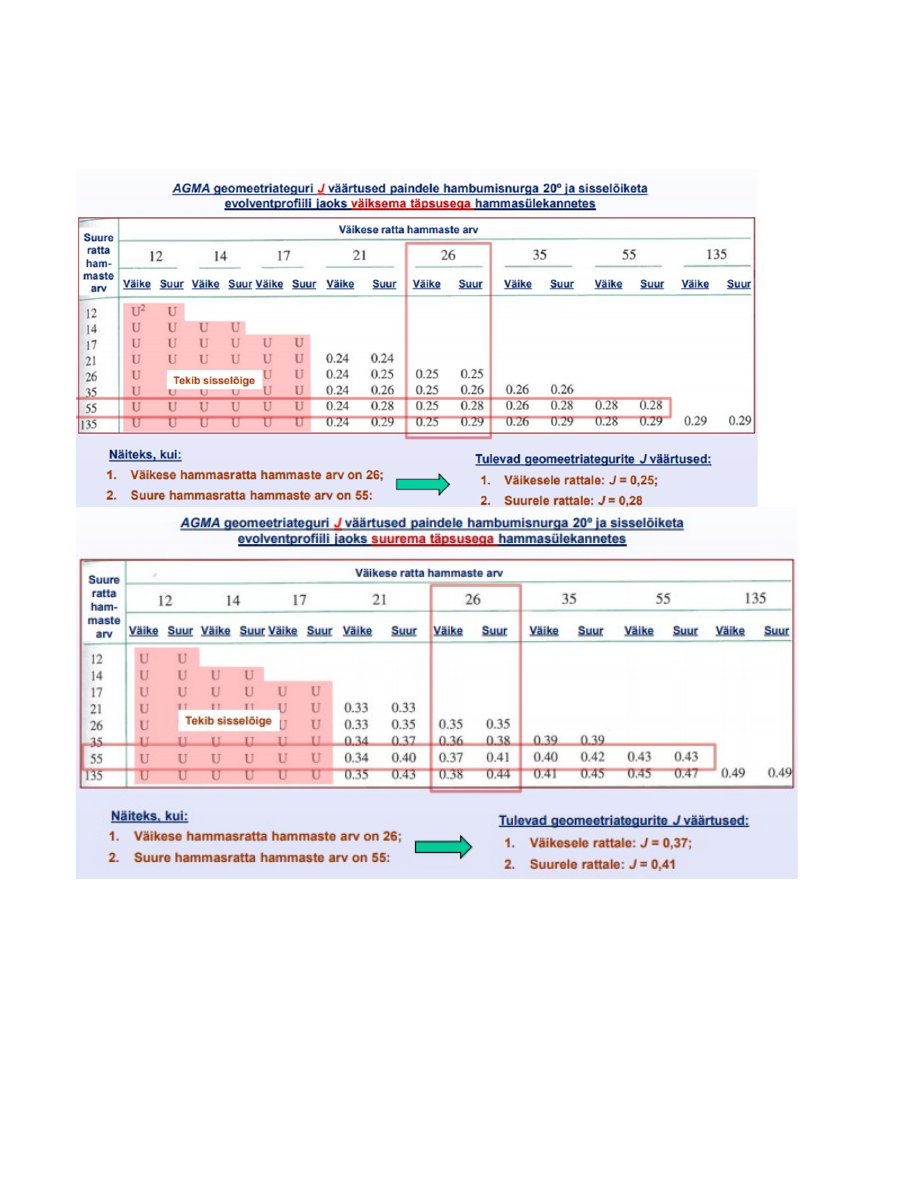
Tabel 4. AGMA geomeetriateguri J väärtused paindele hambumisnurga 20° ja
sisselõiketa
evelventprofiili jaoks väiksema ja suurema täpsusega
hammasülekannetes
Kui z1 = 26 ja väike täpsus =>J = ~0,25
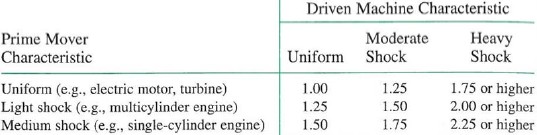
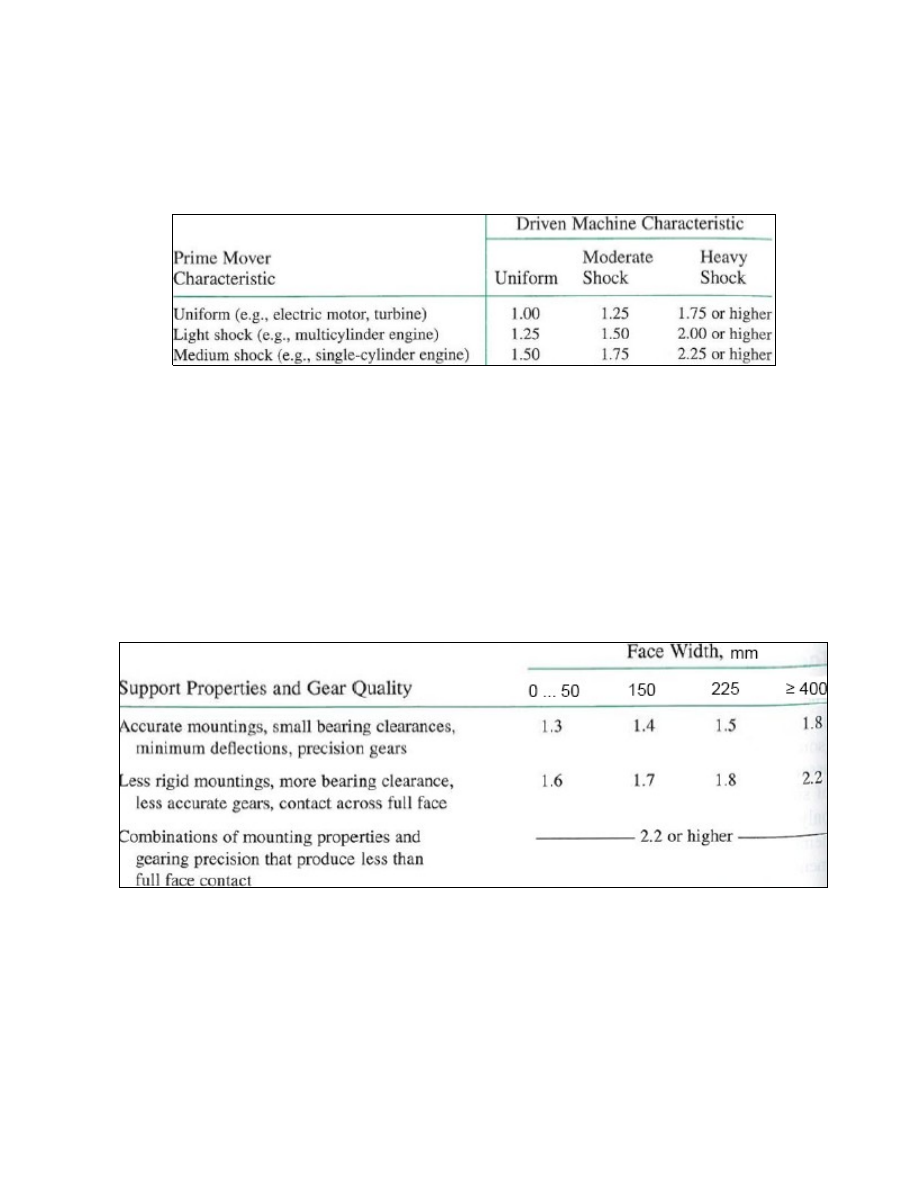
Ka - Ülekoormustegur (rakendustegur)
Kv - Dünaamikategur
Km - Koormuse kontsentratsioonitegur (paigaldustegur)
KI - Parasiitratta tegur:
9
kahepoolse paindega parasiitratta hammastele KI = 1,42;
ühepoolse paindega hammastele KI = 1,0.
Tabel 5. Ülekoormusteguri Ka väärtusi
keskmise koormuse korral võib võtta Ka =1,25
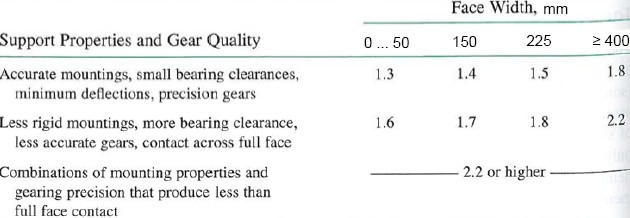
Koormuse kontsentratsioonitegur Km arvestab koormuse ebaühtlast jagunemist
hamba laiusel, tulenevalt:
1. Valmistamise asjaoludest;
2. Laagrite lõtkudest;
3. Laagerduste ja võlli/telje jäikusest
Tabel 6. Koormuse kontsentratsiooniteguri Km väärtusi
Km= 1,3 kuna selles ülesandes on tegemist suure/keskmise täpsusega
hammasratastega. Väikeste/Keskmiste laagrite lõtkudega ja suure laagerduse ka
võlli jäikusega.
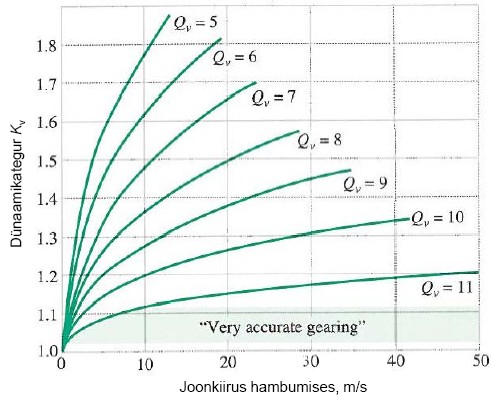
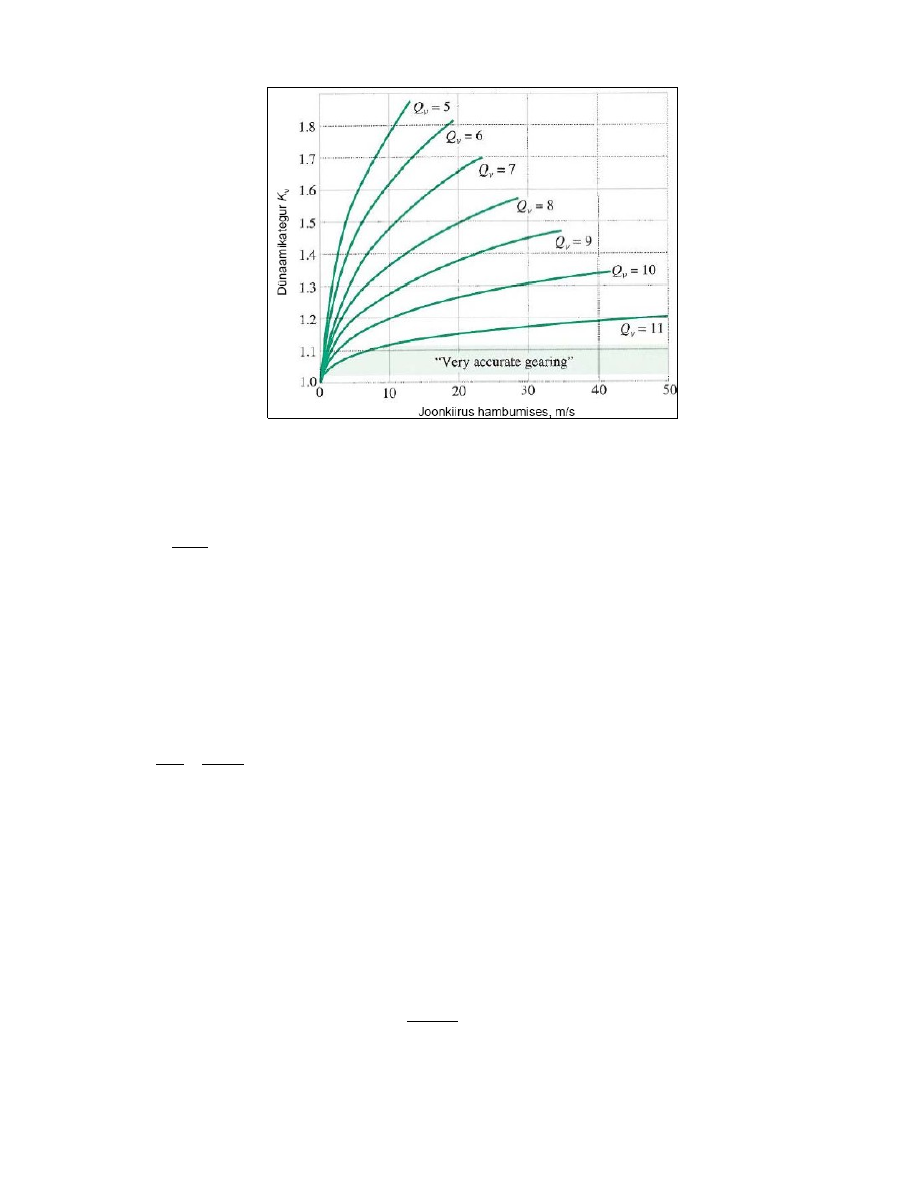
Tabel 7. Dünaamikateguri Kv sõltuvusi hammasratta kvaliteedist ja
joonkiirusest hambumises
10
Kui Qv = 10 ja v = 3 m/s => Kv =1,1
[σ]S] = 1....1,5
S=
σ 0
(
D )
σ
≤
[ S ]
, kus σ0
(
D )
=
σ 0⋅Y N⋅Rg= 280· 1,2 · 1 = 336 MPa (tsüklite arv 106)
NB!
YN määramisel Näiteks kui masin peaks töötama 5 aastat, 50 nädalat aastas; 60 tundi nädalas,
kusjuures hammasratta pöörlemissagedus on 1000 pööret minutis, siis töötsüklite arv on = 5 aastat
✕ (50
nädalat/aastas)
✕ (60 tundi/nädalas) ✕ (60 minutit/tunnis) ✕ 1100 pööret minutis = 9.9 x 10^8 > 10^6 ehk
üle miljonit töötsüklit.
S=
σ 0
(
D)
σ
=
336
193,7
=
1,73> [σ]S] = 1,2....1,5
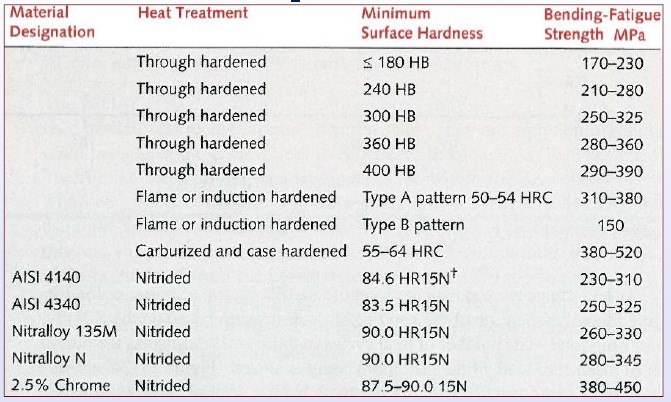
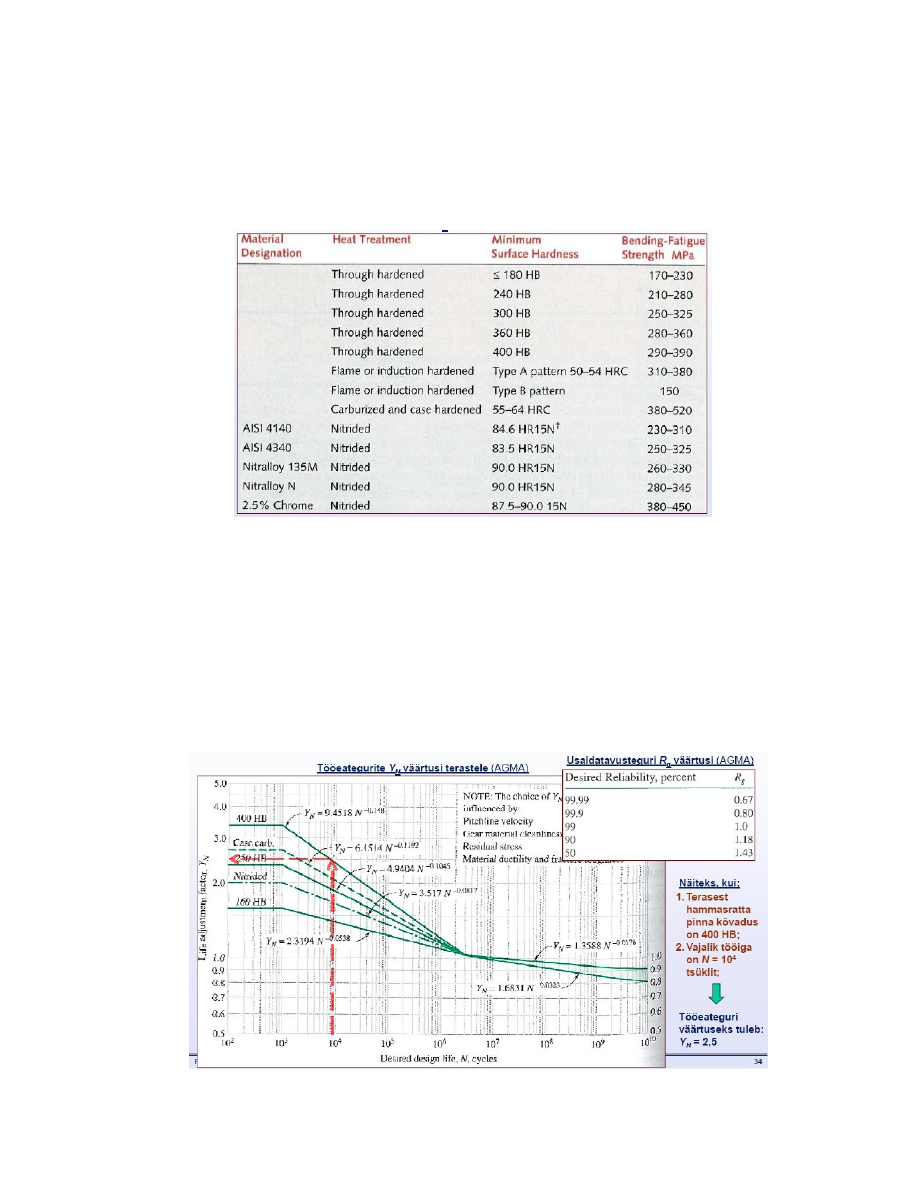
σ]0 - materjali väsimuspiir ühepoolsel paindel tsüklite arvule 107 usaldatavusega
99 % (vt. Tabel 8). Kui hammasratas on pindkarastatud ja selle kõvadus on 300
HB, siis σ]0 = 280 MPa.
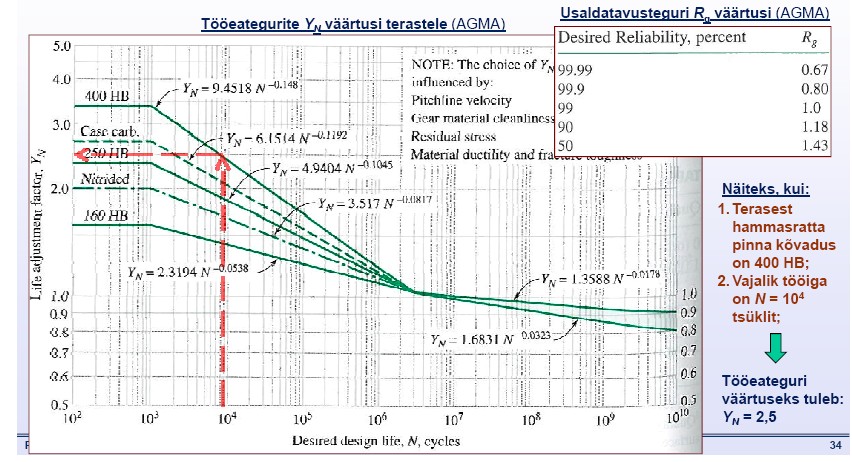
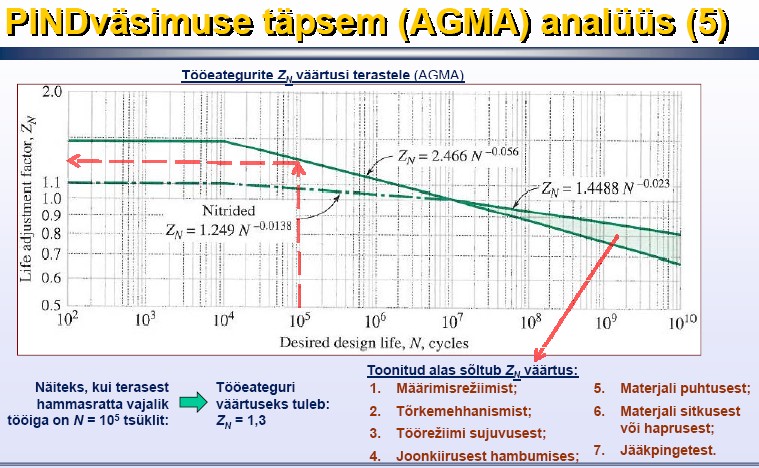
YN - Tööeategur – võimaldab arvutust optimeerida, kui hammasratta nõutav
tööga erineb väärtusest 107 tsüklit (täispööret) (vt. Tabel 9). Kui hammasratta
nõutav tööiga on 106 tsüklit, siis kõvaduse 300 HB korral YN = 1,2.
Rg - Usaldatavustegur – võimaldab arvutust optimeerida, kui nõutav usaldatavus
(töökindlus) erineb väärtusest 99 % (vt. Tabel 9).
11
Tabel 8. Teraste 107 pingetsükli väsimuspiir σ0 ühepoolsel paindel
usaldatavusega 99 % (AGMA), ligi 280 MPa, kui kõvadus on 300 HB.
Tabel 9.Tööeategurite YN väärtusi terastele (AGMA)
12
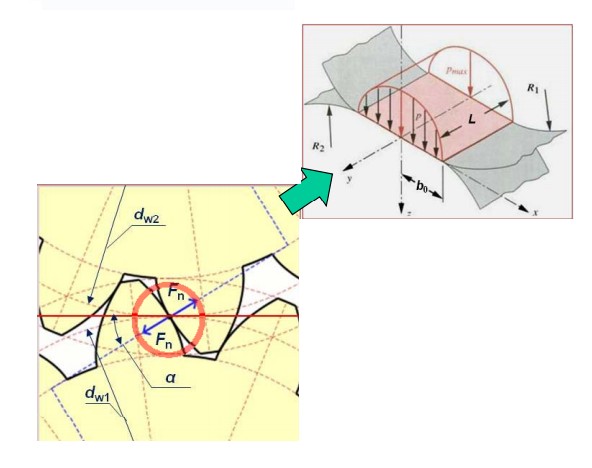
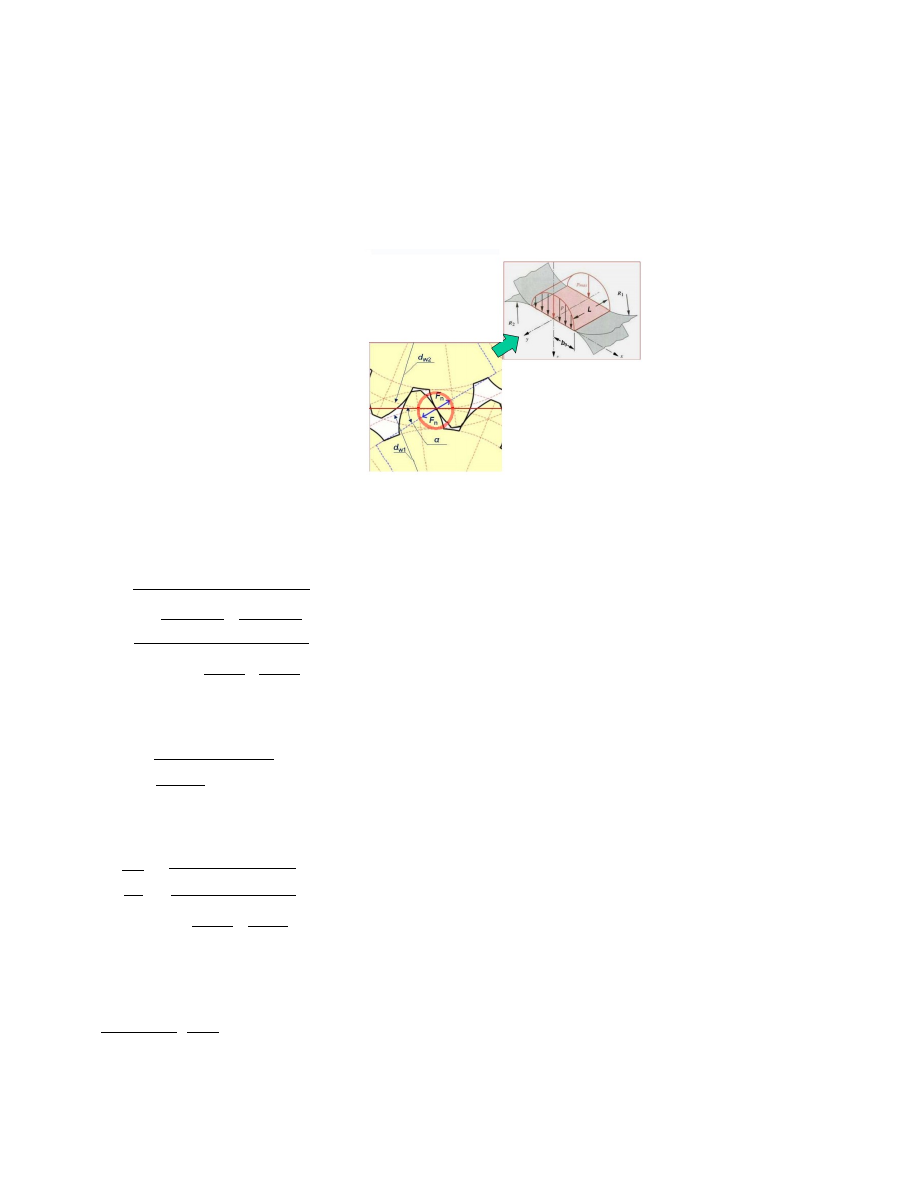
Pindväsimuse analüüs
Kahe hambaprofiili kontakti saab vaadelda kui kahe silindri kontakti.
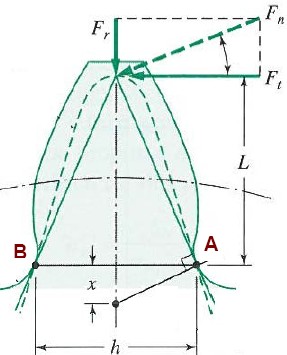
Joon. 7. Hambaprofiili kontakt
Hertz’i suurim kontaktpinge
P
max=
√Ft(
2
dw1 sin α
+
2
dw2sin α
)
πbb cos α
(
1−v1
2
E
1
+
1−v2
2
E
2
)
Suurim kontaktpinge hambaprofiilide kontaktis (AGMA)
P
max=C P
√
F
t
b d
w 1 I
K
a K v K m
Elastsustegur
CP=
√
E
¿
πb
=
√
1
πb
(
1−v
1
2
E
1
+
1−v
2
2
E
2
)
Geomeetriategur pindväsimusel
I=
sin α cos α
2
(
u
u+1
)
Hammasratta tugevustingimus tsüklilisel pindsurvel
13
S=
P0
( D )
P
max
≥ [S ]
Hamba kohalik väsimuspiir
P0
(
D)
=
p0 ZN Rg
CP – elastsustegur
b – hamba laius
dw1 – väiksema hammasratta jaotusringjoone läbimõõt
I – Geomeetriategur pindväsimusel
Ka – ülekoormustegur
Kv – Dünaamikategur
Km – Koormuse kontsentratsioonitegur
(
Ka, Kv, Km väärtused samad mis painepinge analüüsis)
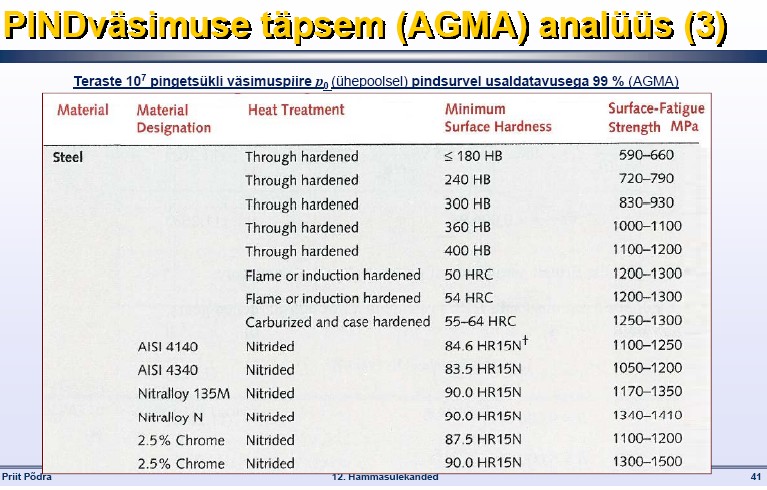
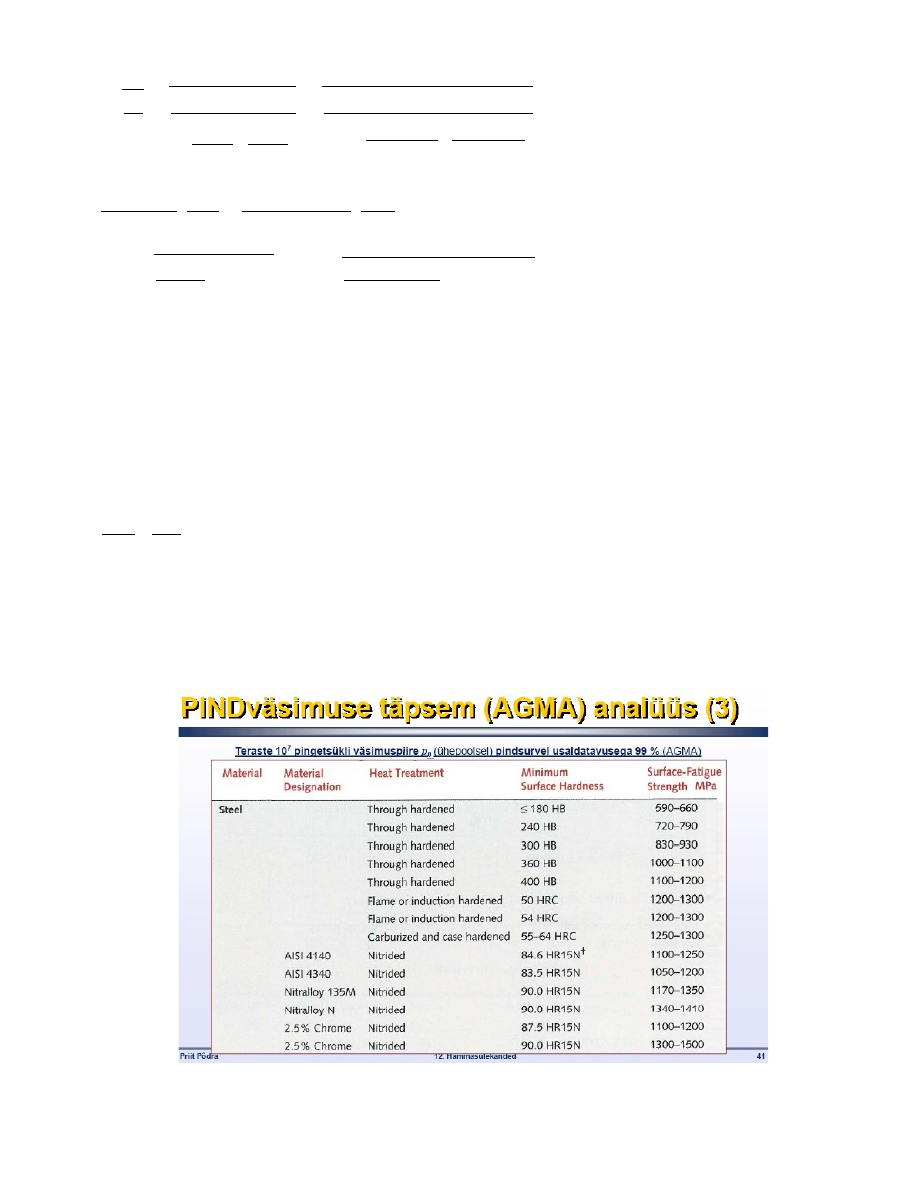
P0(D) – Hamba kohalik ühepoolse pingetsükli väsimuspiir pindsurvel
p0 – Materjali väsimuspiir ühepoolsel pindsurvel tsüklite arvule 107
usaldatavusega 99% (930 MPa tabelist, kui kõvadus on 300 HB) (tabelist 10)
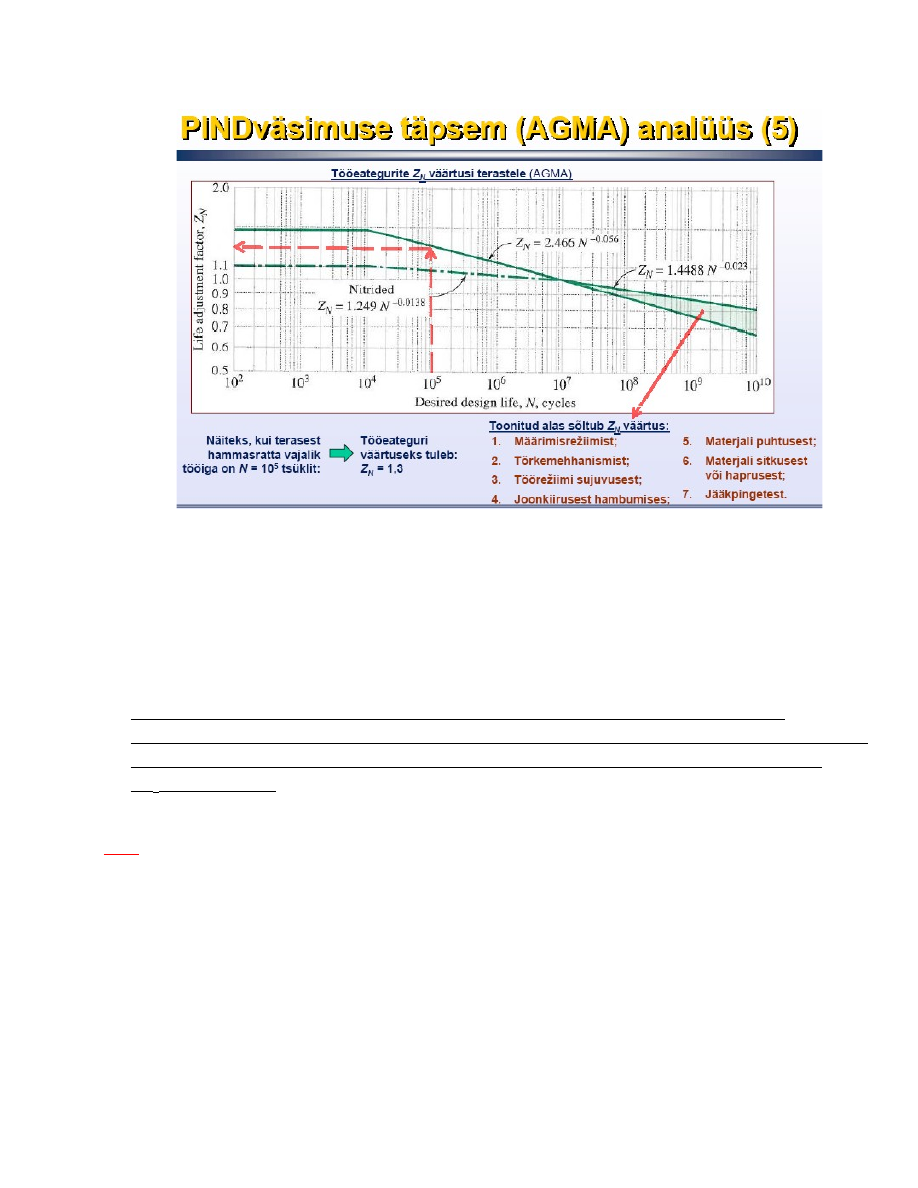
ZN – tööeategur, võimaldab arvutust optimeerida, kui hammasratta nõutav tööiga
erineb väärtusest 107 tsüklit. (tabelist 11)
Rg – Usaldatavustegur, võimaldab arvutust optimeerida, kui nõutav usaldatavaus
erineb väärtusest 99%
u – ülekandesuhe (u ≥1, sellesülesandes u=4)
ν1 - vedava (väiksema ) hammasratta materjali Poisson’i tegur
v2 - veetava (suurema) hammasratta materjali Possion’i tegur
E1 – vedava (väiksema) hammasratta materjali elastsusmoodul
E2 – veetava (suurema) hammasratta materjali elastsusmoodul
Süsinikterase elastsusmoodul Et=200 GPa ja Poissoni tegur vt=0,246
14
CP=
√
E
¿
πb
=
√
1
πb
(
1−v
1
2
E
1
+
1−v
2
2
E
2
)
=
√
1
3,14
(
1−0,246
2
200 ·10
9 +
1−0,246
2
200 ·10
9
)
=
184,1 MPa
I=
sin α cos α
2
(
u
u+1
)=
sin 20 °cos20 °
2
(
4
4+ 1
)=0,128
P
max=C P
√
F
t
b d
w 1 I
K
a K v K m =184,1
√
2438,5
30· 78 · 0,128
1,25 ·1,3 ·1,1=702 MPa .
P0
(
D)
=
p0 ZN Rg=¿930 · 1 · 1=930 MPa.
NB! ZN määramisel Näiteks kui masin peaks töötama 5 aastat, 50 nädalat aastas; 60 tundi nädalas,
kusjuures hammasratta pöörlemissagedus on 1000 pööret minutis, siis töötsüklite arv on = 5 aastat
✕ (50
nädalat/aastas)
✕ (60 tundi/nädalas) ✕ (60 minutit/tunnis) ✕ 1100 pööret minutis = 9.9 x 10^8 > 10^6 ehk
üle miljonit töötsüklit.
S=
P0
( D )
P
max
=
930
702
=
1,33≥ [S ]=1,2 …1,5
Hammasülekande tugevus on pindväsimusele tagatud.
Tabel 10. Materjali väsimuspiir ühepoolsel pindsurvel tsüklite arvule 107
usaldatavusega 99%
(930 MPa tabelist, kui kõvadus on 300 HB).
15
Tabel 11.Tööeategurite ZN väärtusi terastele (AGMA)
NB! Juhul kui tugevustingimused pole täidetud, siis valida suurema
piirväsimusega materjalid (teine karastuse tüüp ja suurem kõvadus)
näiteks kõvaduse väärtus HRC 50 – 55 (induktsioonkarastus,
pindkarastus vm)
NB! Teostada mõlema hammasratta ja võlli liistliite arvutus (vt.
arvutuste näited Moodle e-kursuse õppematerjalides).Teostada liistliite
tugevuskontrolli muljumisele ja lubatavaks muljumispingeks valida
[ σ
c]=100 MPa.
NB! Liistusoone põhja ja hamba jala vahekaugus peaks olema mitte vähem kui
kahekordne moodul ehk näiteks 2xm = 2x4 = 8 mm.
4. Võllide esialgne projekteerimine ja sidurite valik
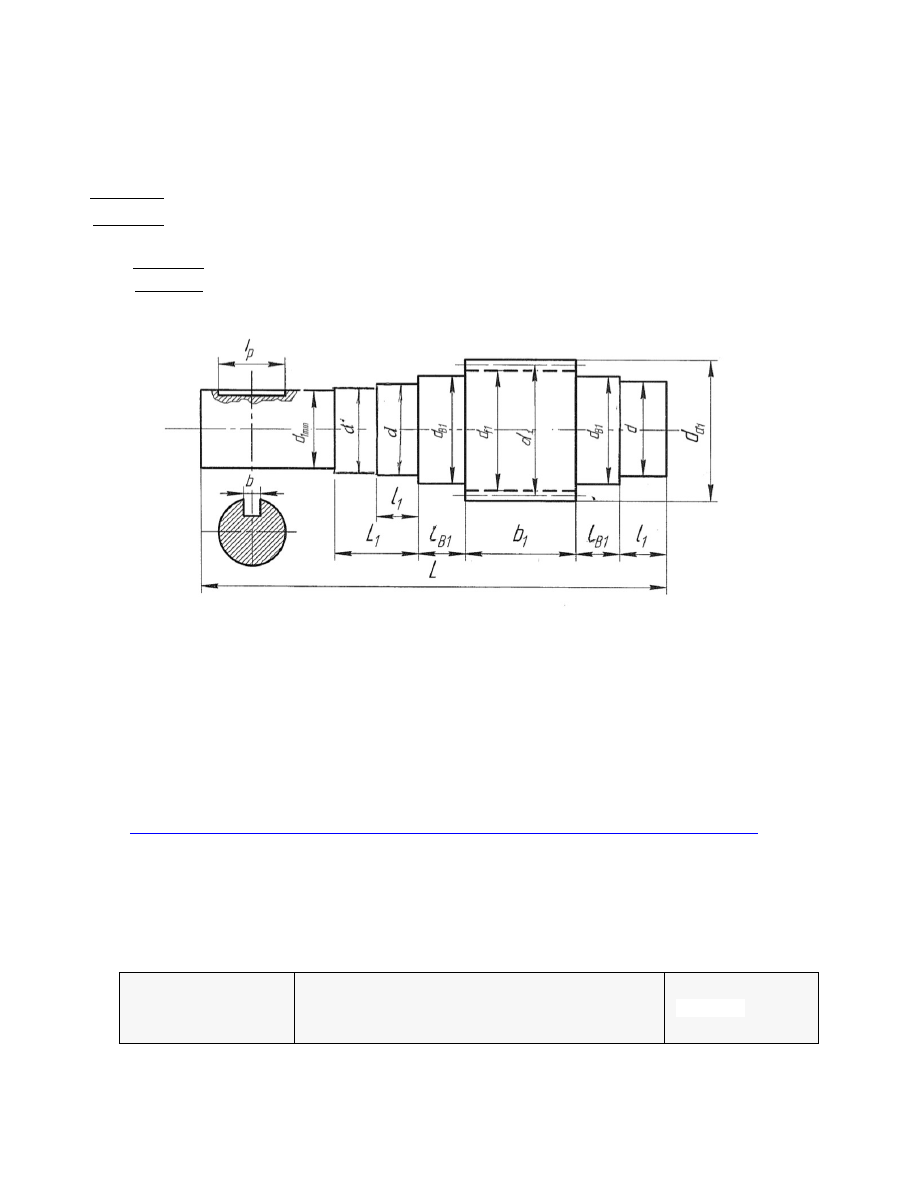
Sisendvõlli eskiisi koostamine
Võlli läbimõõt d1min (vt. joonis 8 arvutatakse tugevustingimusest väändele, võttes
lubatavaks väändepingeks (15…25) MPa. Lubatav väändepinge väärtus kehtib
reduktori võllidele ligikaudse vähima läbimõõdu arvutamisel, juhul kui on
16
tegemist konstruktsiooniliste terastega. Pakutud lubatav väändepinge väärtus
võtab arvesse väsimuspinged, mis tekkivad tsükliliselt koormatud võllis ning
põhineb projekteerimispraktikal. Sisendvõllil mõjub pöördemoment T1 = 95,1 Nm.
Seega tugevustingimusest väändele sisendvõlli min. läbimõõt avaldub kui:
d1min≥
3
√
16 ∙ T
1
πb ∙20 ∙ 10
6
d
1 min ≥
3
√
16 ·95,1
πb·20 · 10
6 =0,029 m
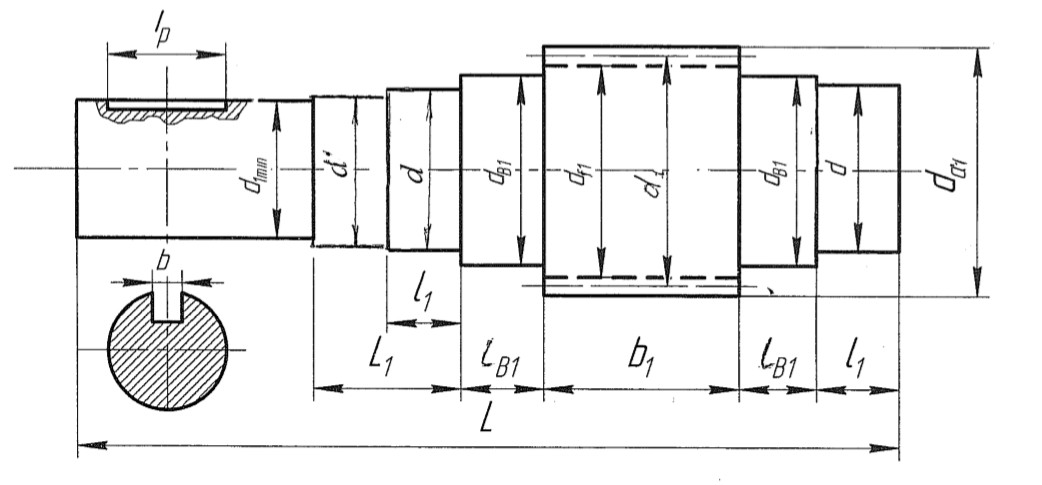
Joon. 8. Sisendvõlli eskiis. NB! Võlli joonisel peaksid samuti olema faasid ja
üleminekuraadiused!
Saadud läbimõõt d1min ümardame eelisarvuni 30 mm (eelisarvude rida). Seejärel
valitakse sidur mootori ja reduktori sisendvõlli ühendamiseks.
Kuna mootori võlli läbimõõt on 48 mm (vt. tabel 13), siis sobivad järgmised Rotex
siduripooled:
https://www.alas-kuul.ee/sidurid/sidurid/rotex-sidurid/rotex-42-sidurid
Tabel 12. Siduri esmakordne valik
ROTEX 42 GG-1
D=30
Siduri pool, malm, D=30H7, liistusoon, stopper
64,45 €/tk
17
ROTEX 42 GG-1A
D=48
Siduri jäme pool, malm, D=48H7, liistusoon,
stopper
71,55 €/tk
Tabel 13. Mootori mõõtmed. NB! mootori võlli läbimõõt D = 48 mm
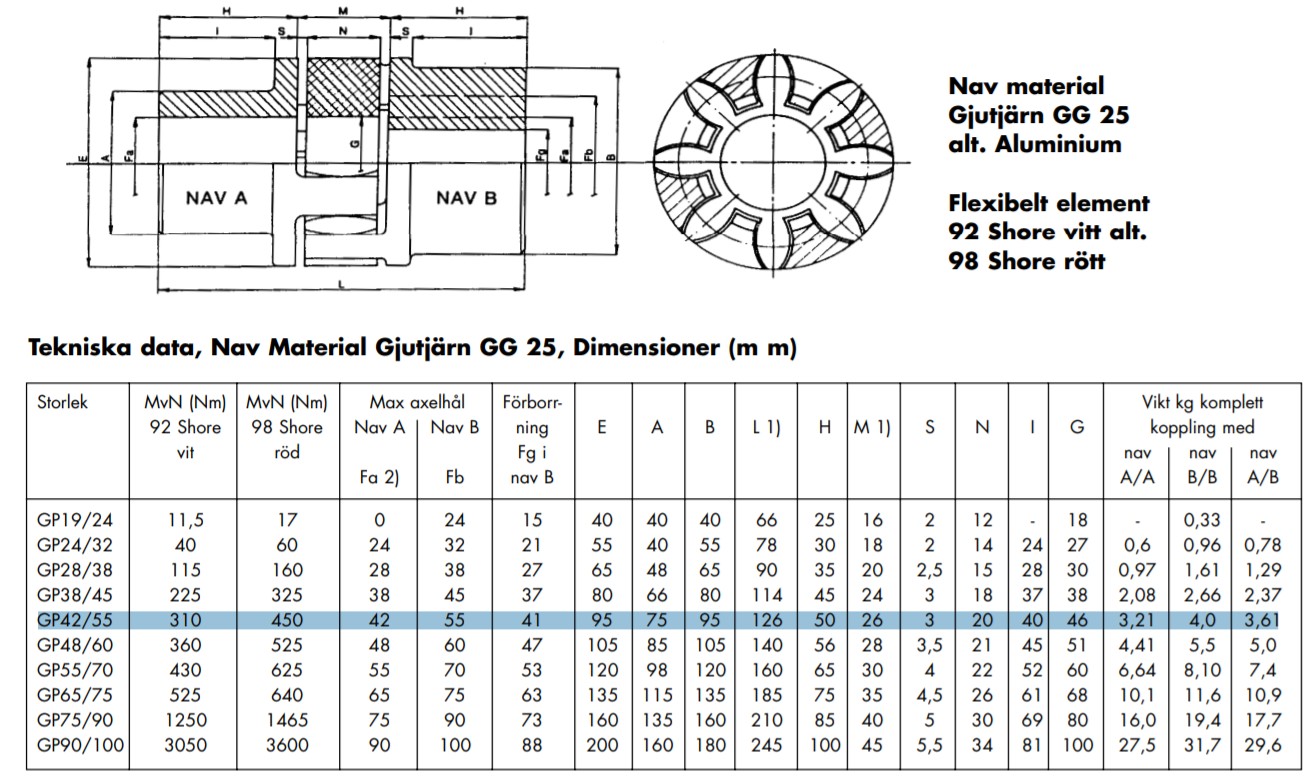
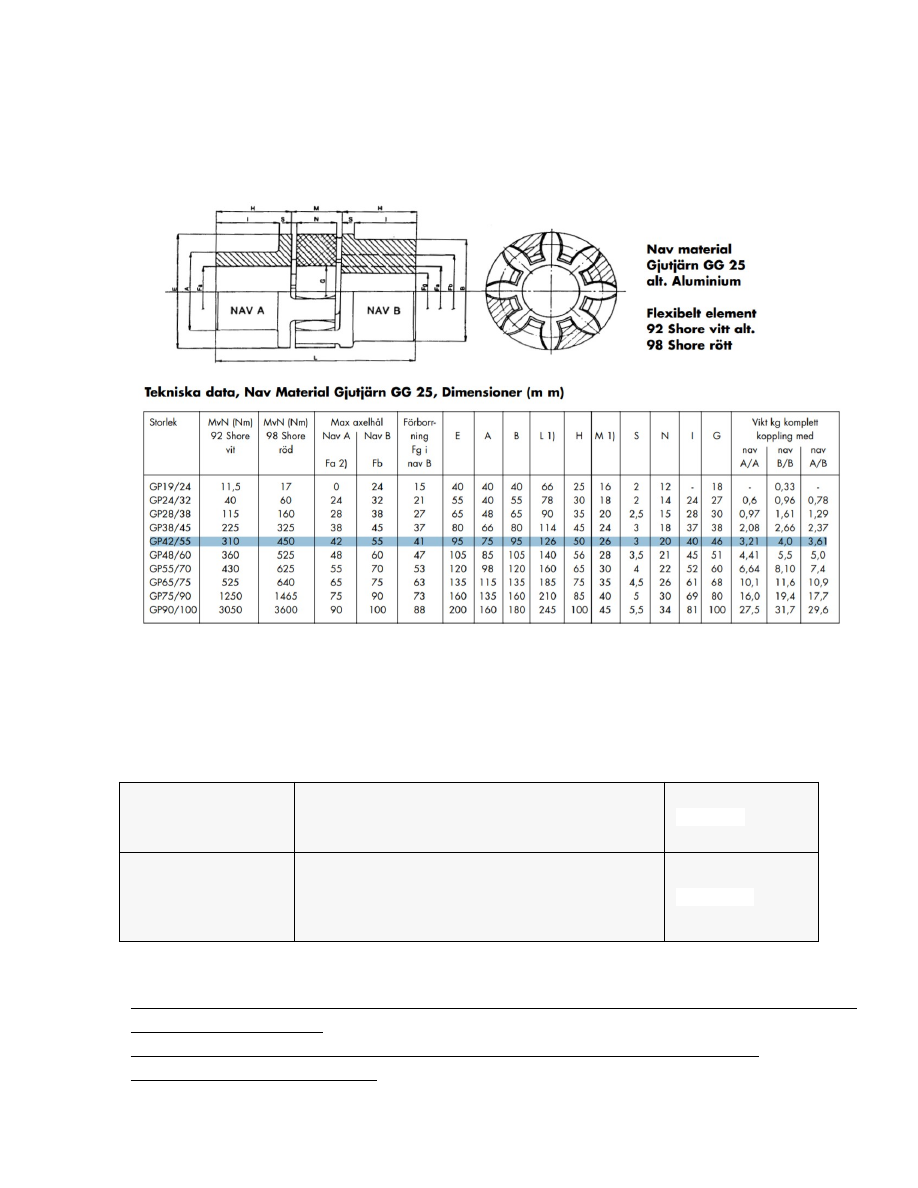
Või Valitakse Rotex sidur, mille tähistus on GP42/55 ja lubatav pöördemoment on
310 Nm.
Isegi kui võtta režiimi teguriks Krež = 3, siis oleks siduri nominaalseks
momendiks 285 Nm, mis on alla lubatava 310 Nm.
18
Tabel 14. Rotex sidur
Siduri valikul tuleks arvesse võtta ka mootori võlli liistusoone pikkust. Kuna
väljavalitud mootori mõõde E = 110 mm, siis parem oleks valida sidur GP55/70,
mille lubatav pöördemoment on 430 Nm:
Tabel 15. Siduri lõplik valik
ROTEX 55 GG-1
D=30
Siduri pool, malm, D=30H7, liistusoon, stopper
95,95 €/tk
ROTEX 55 ST-1b
Siduri jäme pikendatud pool (L=90mm), teras,
töötlemata ava
120,15 €/tk
Selle Alaskuul poolt pakutava siduri siduripoole pikkus on L = 90 mm.
NB! Teostada liistliite arvutuse (vt. arvutuste näited Moodle e-kursuse
õppematerjalides).
Teostada liistliite tugevuskontrolli muljumisele ja lubatavaks
muljumispingeks valida
19
[ σ
c]=100 MPa.
Liistliite arvutus
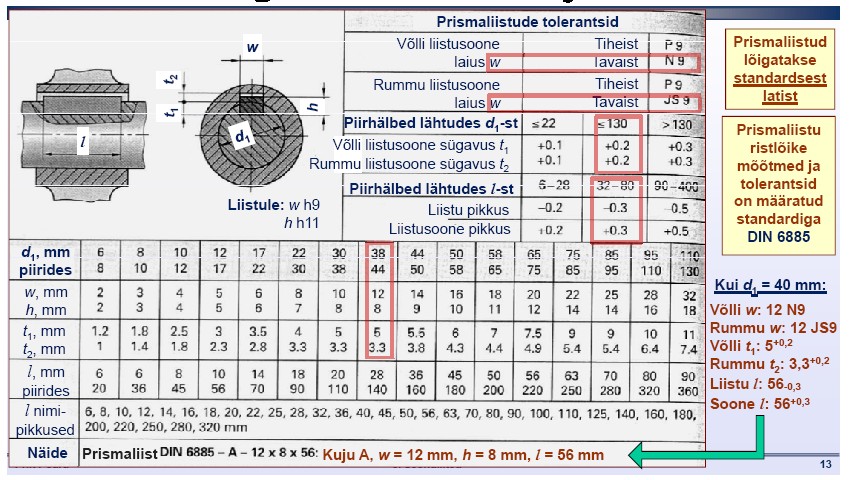
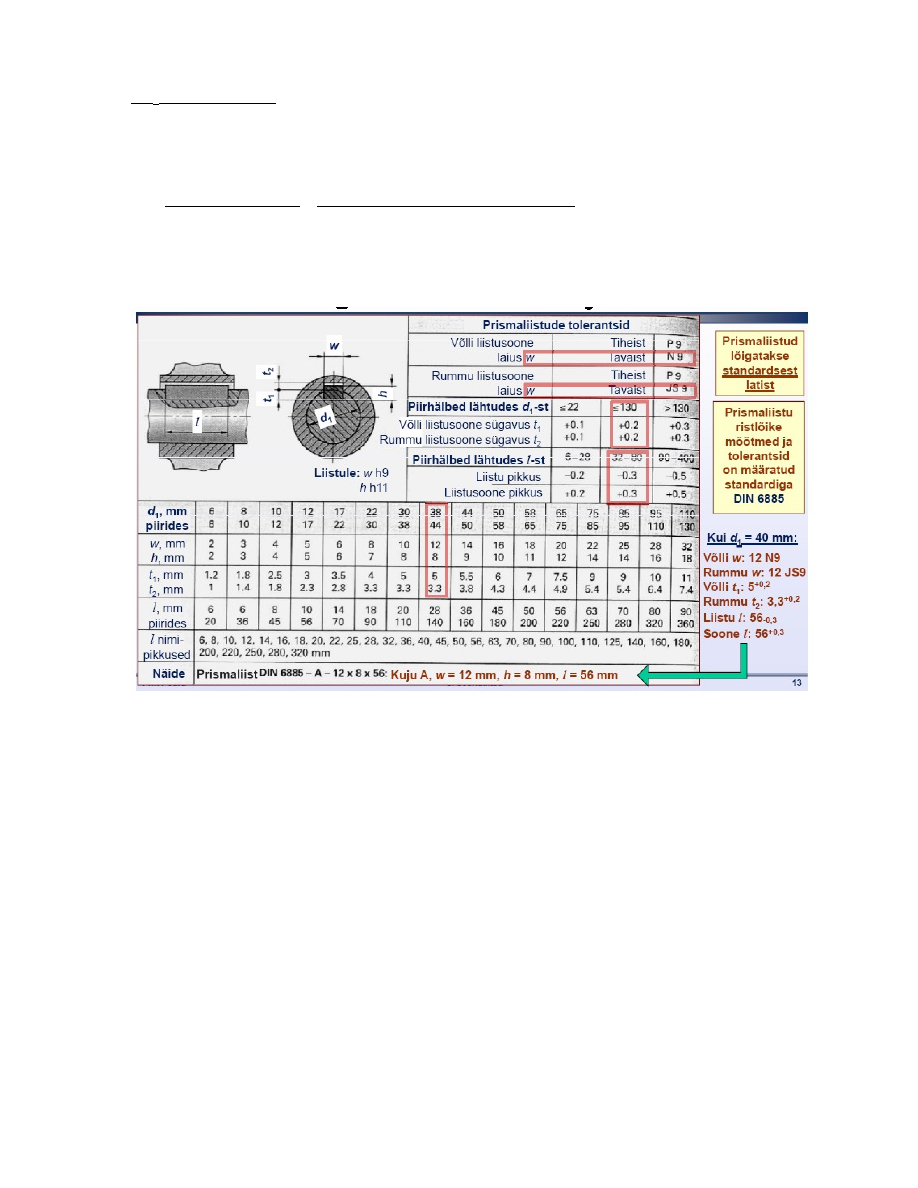
Juhul kui võlli läbimõõt on 30 mm, siis sobib kasutamiseks liist 8x7 mm ehk w = 8
mm ja h = 7 mm, mille t1= 4 mm. Liistu pikkus l = 45 mm.
σ
C=
2 T
1
d1min (h−t1) ⋅(l−w )
=
2
⋅95,1
0,03 (0,007−0,004 )
⋅( 0,045−0,008)
≈57,2 MPa<[ σc]=¿100 MPa
Tugevustingimus on täidetud.
Tabel 16. Liisliite parameetrid
Järgmise etapina valitakse laagreid. Juhul, kui telgkoormused on alla 25%
radiaalkoormustest, siis soovitakse valida laagritüübiks radiaalkuullaagreid.
Kataloogi valiku tuleks alustada kergema seeria laagritest.
Võllide osad laagrite all on läbimõõtudega d ja pikkusega l1, kus d vastab
laagriava läbimõõdule ja
l1 = B + (0,4…0.5)d, kus B on valitud laagri laius. dВ1 =(1,07 …1,25)d. d′ on
tihendi koht, kusjuures d>d′> dВ1. Teised võlli osade pikkused täpsustatakse
edasise reduktori projekteerimise käigus.
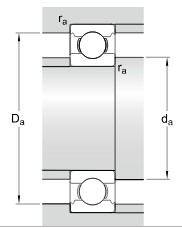
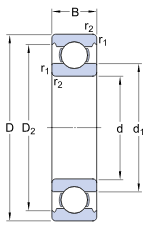
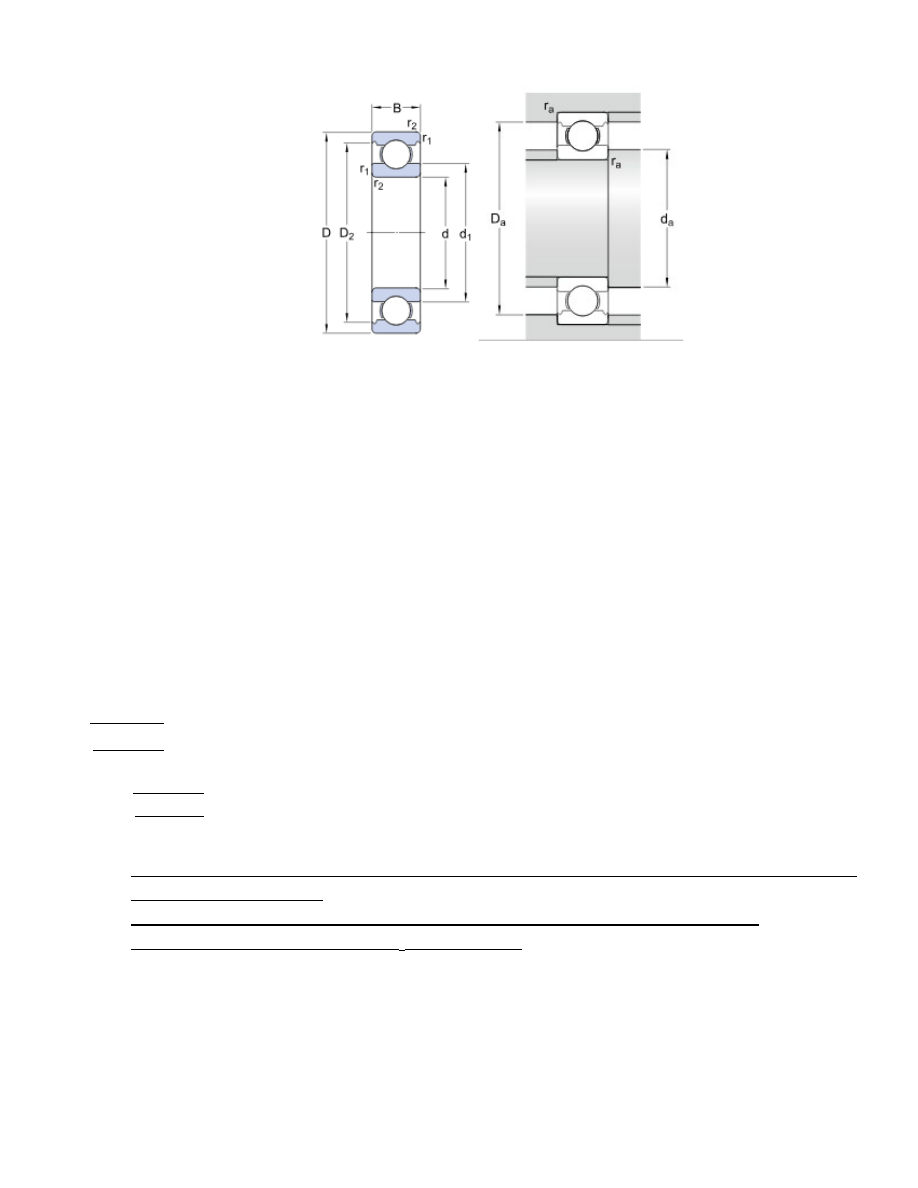
Laagritena pakutakse kasutada 6207. Selle laagri mõõtmed on järgmised
(siseava- (d), välisläbimõõt (D), laius (B)): d= 35 mm; D= 72 mm ja B = 17 mm.
Võlli astme läbimõõt da min. 42 mm. Korpuse ava maksimaalne läbimõõt Da =
65 mm. Võlli astme üleminekuraadius ra = 1 mm (vt. joon.9).
20
Joon. 9. Radiaalkuullaagri mõõtmed ja SKF poolt soovitatavad võlli
mõõtmed.
l1 = B + (0,4…0.5)d = 17 + 0,5 · 35 =34,5 mm => 35 mm (kuna võllil peaks
jääma ruumi ka määrdeaine hoidvate rõngastele)
dВ1 =(1,07…1,25)d = 1,25 · 35 = 43,75 mm => 45 mm.
d′ = 32 mm (tihendi osa).
Väljundvõlli eskiisi koostamine
Väljundvõllil mõjub pöördemoment T2 = 365,1 Nm.
Väljundvõlli minimaalne läbimõõt d2min arvutatakse analoogselt sisendvõlli
läbimõõduga d1min:
d2min≥
3
√
16 ∙ T
2
πb ∙20 ∙ 10
6
d
2 min ≥
3
√
16 · 365,1
πb· 20· 10
6 = 0,045 m
NB! Teostada liistliite arvutuse (vt. arvutuste näited Moodle e-kursuse
õppematerjalides).
Teostada liistliite tugevuskontrolli muljumisele ja lubatavaks
muljumispingeks valida [
σ
c]=100 MPa.
Liistliite arvutus
Juhul kui võlli läbimõõt on 45 mm, siis sobib kasutamiseks liist 14x9 mm ehk w =
14 mm ja h = 9 mm, mille t1= 5,5 mm. Liistu pikkus l = 80 mm. Sellisel juhul on
21
kasutatud sama siduripoolt, mis sisendvõlli ja mootori võlli siduri puhul (tabel
17).
σ
C=
2 T
2
d2min(h−t1) ⋅(l−w )
=
2
⋅365,1
0,045(0,009−0,0055)
⋅(0,08−0,014)
≈ 71 MPa<[σ c]=¿100MPa
Tugevustingimus on täidetud.
Tabel 16. Väljundvõlli ja rihmaratta võlli/telje sidur.
ROTEX 55 ST-1b
Siduri jäme pikendatud pool (L=90mm), teras,
töötlemata ava
120,15 €/tk
Selle Alaskuul poolt pakutava siduri siduripoole pikkus on L = 90 mm.
Järgmise etapina valitakse väljundvõlli toetavad laagrid. Laagriava läbimõõduks
valitakse 50 mm, kuna väljundvõlli tapi läbimõõt on 50 mm.
Laagritena pakutakse kasutada 6210. Selle laagri mõõtmed on järgmised
(siseava- (d), välisläbimõõt (D), laius (B)): d = 50 mm; D = 90 mm ja B = 20 mm.
Võlli astme läbimõõt da min. 57 mm, da max. 62,4 mm. Korpuse ava
maksimaalne läbimõõt Da = 83 mm. Võlli astme üleminekuraadius ra = 1 mm
(vt. joonis 9).
22
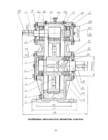
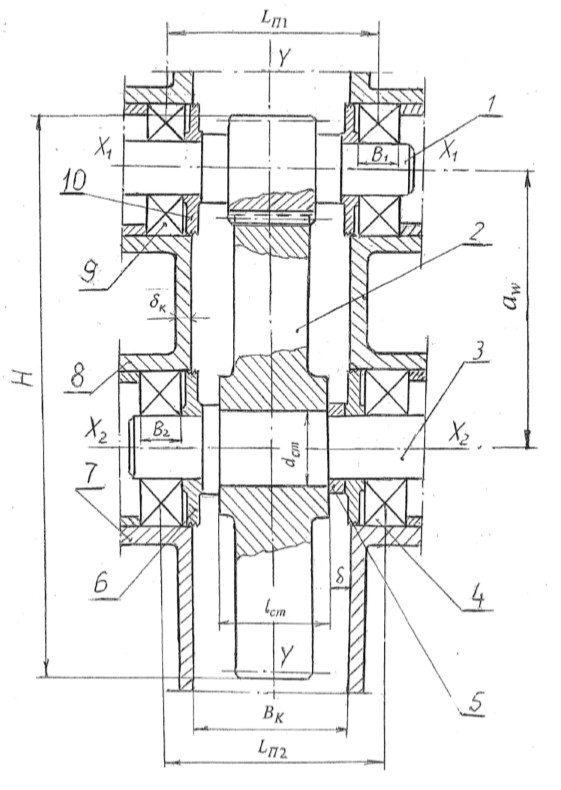
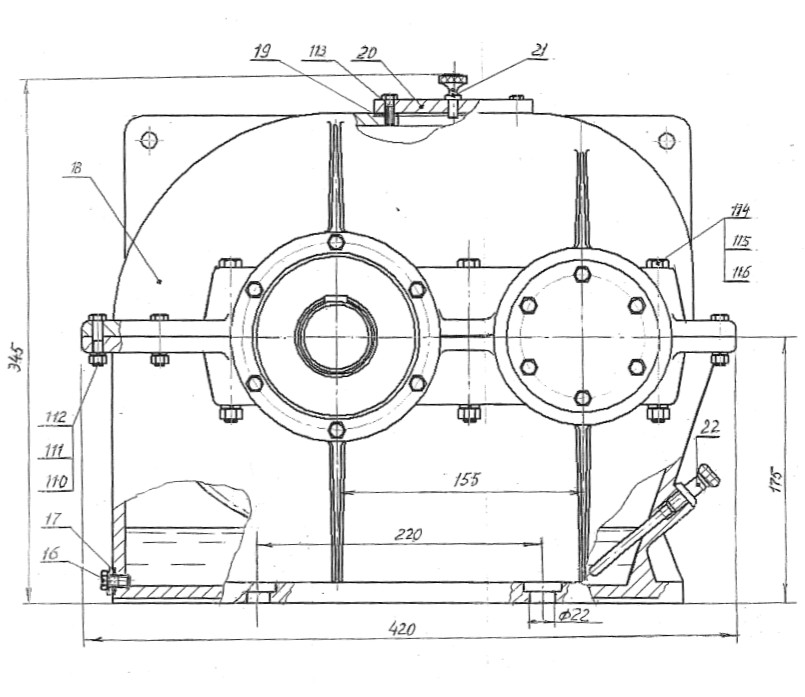
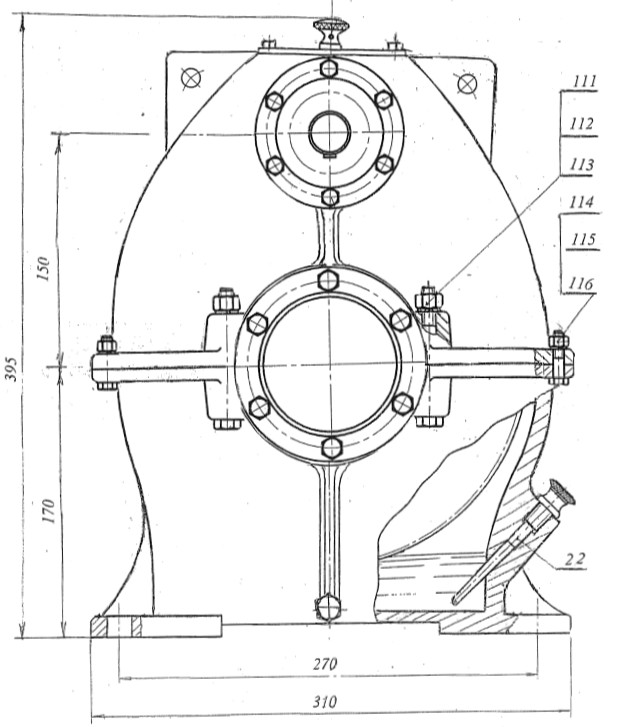
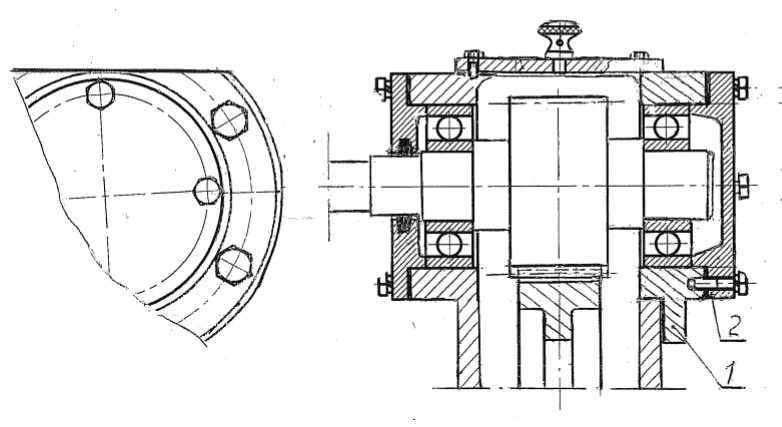
Joon. 10. Väljundvõlli eskiis; reduktori kavand. NB! Võlli joonisel peaksid
samuti olema faasid ja üleminekuraadiused!
Järgmine reduktori väljundvõlli aste, mis vastab võlli läbimõõdule dcm vastab
hammasratta rummu läbimõõdule. dcm = (1,07…1,25)d => dcm = 1,1 · 50 = 55
mm (vt. Joon. 10). Lisaks tuleks kasutada õlgmiku (tugiääris) ühelt poolt
hammasratta ning teiselt poolt määrdeainet hoidva rõnga fikseerimiseks võlli
telgsihis, mille läbimõõduks võiks võtta 60 mm. Õlgmiku ehk tugiäärise asemel
võib kasutada vaherõngaid (vt. joon. 10).
Reduktori esialgne kavandamine (vt. joon.9)
Reduktori mõõtmed:
Hammasrataste tsentrite vahekaugus aw = (dw1 + dw2)/2 = (78 + 312)/2 =
195 mm;
23
Korpuse seinapaksus δk = 0,025 aw + 1 = 0,025· 195 + 1 = 5,9 mm,
valitakse δk = 8 mm;
Rummu ja korpuseseina vahekaugus δ = 1,25 δk = 10 mm;
Reduktori korpuse siseruumi laius Bk = lcm + 2δ, lcm on hammasratta/
hammasratta rummu laius.
Veetava võlli laagrite tsentrite vahekaugus LII2 =Bk + B2 + 2Δ, kus B2 = B
ehk laagrite laius ja Δ on määrdeainet hoidvate rõngaste korpusesse
istamise sügavus. Δ =(2..3) mm. Rõnga paksus on 6 mm.
Vedava võlli laagrite tsentrite vahekaugus LII1 =Bk + B1 + 2Δ
5. Võllide tugevusarvutused (kontrollarvutus)
Sirghammastega hammasülekande korral mõjuvad hambumispunktis ainult kaks
jõudu: radiaaljõud Fr ja ringjõud Ft. Ringjõud Ft = 2T2/dw2 = 2 · 365,1/ 0,312 =
2341 N, kus dw2 on suurema hammasratta jaotusringjoone läbimõõt. Fr = Ft · tanα
= 2341 tan20° = 852 N, kus α on evolventprofiiliga hammasratta hambumisnurk.
Hammasratas asetatakse võlli keskele. Sellisel juhul toereaksioonid mõlemas
tasandis (vertikaalne ja horisontaalne) arvutatakse kui: RAy =RBy = Fr/2 = 426 N ja
RAx =RBx = Ft/2 = 1170,5 N
Või arvutada summaarne jõud hambumispunktis F=√ Ft
2
+
F
r
2
= 2500 N,
järelikult RA ja RB on F/2= 1250 N. Summaarne painutav moment Mc on
1250 · l =
1250 · 0,06 = 75 Nm (AC lõik on vaatluse all ja selle tasakaal,
rakendatakse lõikemeetod Mc = RA ·
l )
Vertikaalses tasandis võlli keskel mõjuv paindemoment (lõikemeetod) avaldub
kui Mp1 = Fr/2 · l = 25,6 Nm, kui võtta, et l = 0,06 m.
Horisontaalses tasandis võlli keskel mõjuv paindemoment (lõikemeetod) avaldub
kui Mp2 = Ft/2 · l = 70,3 Nm, kui võtta, et l = 0,06 m.
Summaarne paindemoment võlli kõige ohtlikumas ristlõikes võlli keskel avaldun
kui:
M=
√ M p1
2
+
M
p 2
2
M=
√25,6
2
+
70,3
2
=75 Nm
Viimaseks sisejõu faktoriks, mis mõjub võlli kõige ohtlikumas ristlõikes ehk võlli
keskel on siseväändemoment Tsise. Tsise avaldub kui Tsise = Ft · dw2/2 ehk Tsise =
365,1 Nm.
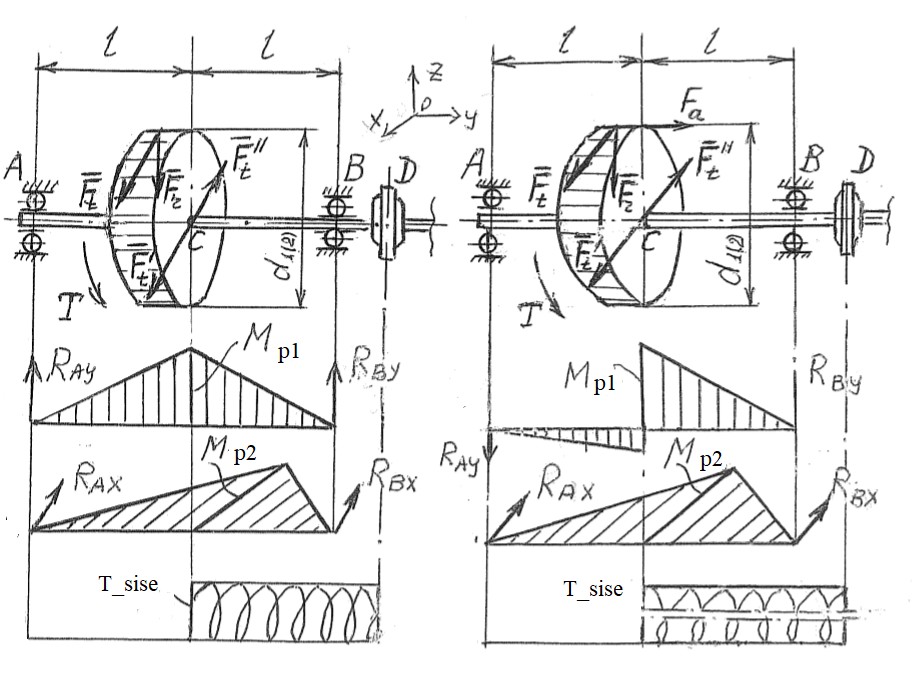
24
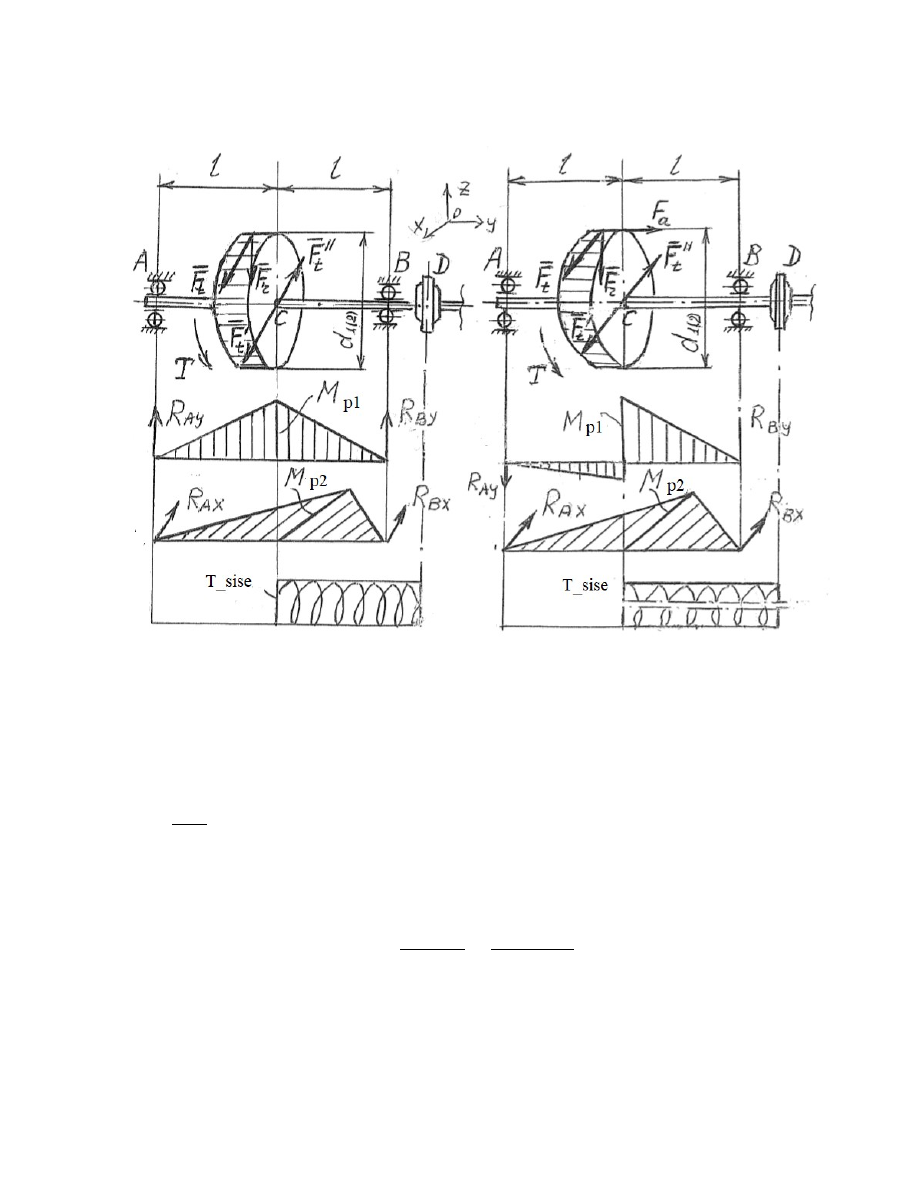
Joonisel 11 a) on toodud väändemomendi Tsise
epüür ning kõikide
painemomentide epüürid. Võlli keskel asuv võlli ristlõige on kõige ohtlikum.
a) b)
Joon. 11. a) sirghammastega hammasülekande; b) kaldhammastega
hammasülekande paindemomentide ja väändemomentide epüürid.
Vastavalt III tugevusteooriale suurim ekvivalentpinge võlli kõige ohtlikumas
ristlõikes on:
σ
ekv
III
=
Mekv
III
W
z
≤ [σ ]
Inseneripraktikast on teada, et võttes arvesse võllide tsüklilist koormamist ja
väsimuspingeid, konstruktsiooniliste teraste korral [σ]σ]] = (40 … 60) MPa.
Kus Wz on võlli ümarristlõike tugevusmoment, Wz = πD = 60 drumm3/32.
drumm = 55 mm on vaadeldava väljundvõlli rummu osa läbimõõt.
M
ekv
III
=
√M
2
+
T
sise
2
=
√75
2
+
365,1
2
=
372,8 Nm
Arvutatakse tegelik ekvivalentne pinge, mis tekib väljundvõlli keskel ehk võige
ohtlikumas ristlõikes:
25
σ
ekv
III
=
M ekv
III
W
z
=
372,8∙ 32
πb ∙0,055
3 =23 MPa ≤ [ σ ] ja [σ]σ]] = (40 … 60) MPa. Seega tugevustingimus on
täidetud.
Võllide astmete üleminekuraadiuste valimisel lähtuda inseneripraktika sh laagri
tootja soovitustest.
Väljundvõlli kontrollarvutus väsimusele (põhineb insenerikogemustel
reduktori võllide projekteerimisel)
Kuna drumm = 55 mm, siis liistu mõõtmed w = 16 mm ; h = 10 mm ja t1 = 6
mm.
Võlli materjal: karastatud teras C45E (σ]y =ReH = 370 MPa, σ]U = Rm = 570 MPa,
-1 = 0,4 · 570 = 245 MPa, -1 = 0,22 · 570 = 125 MPa).
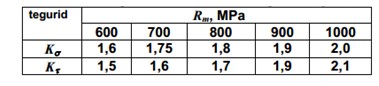
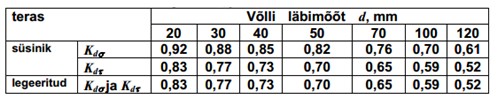
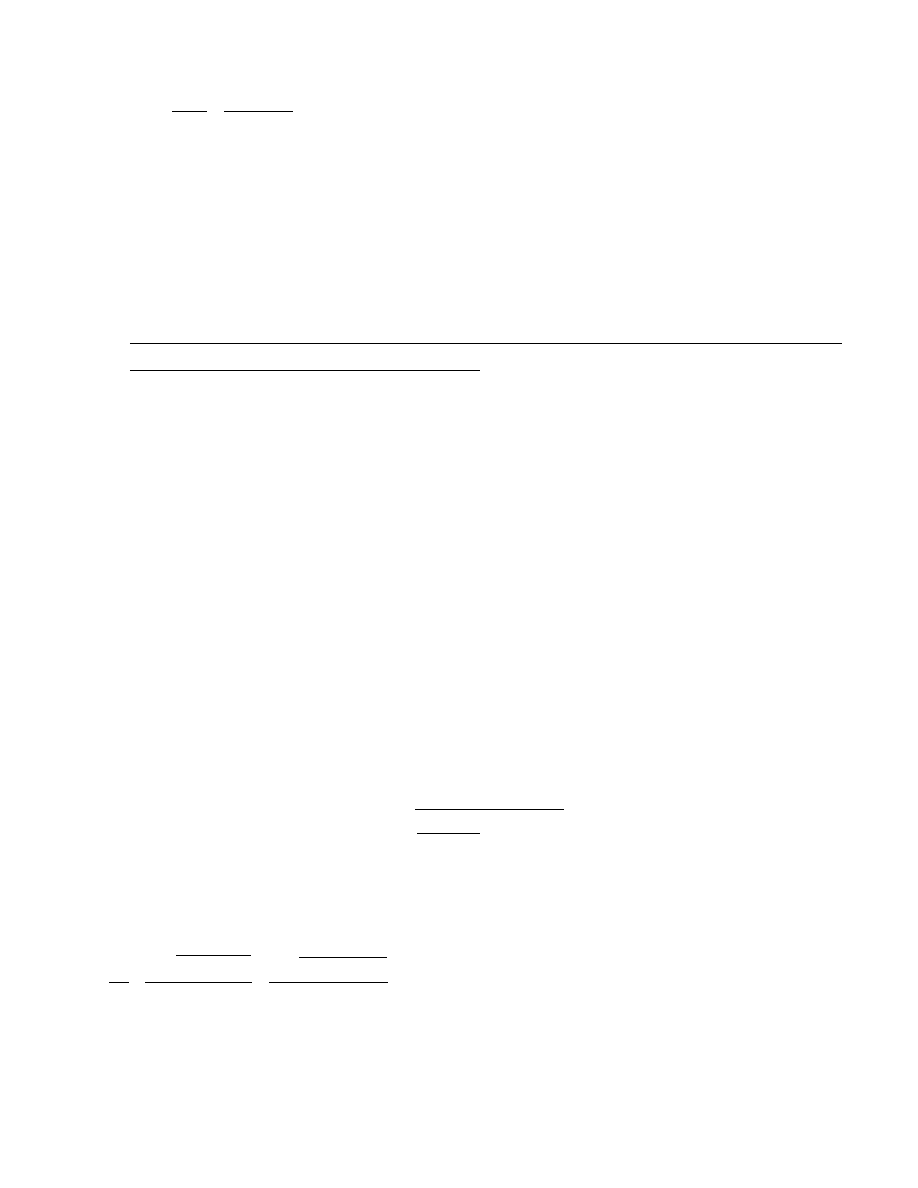
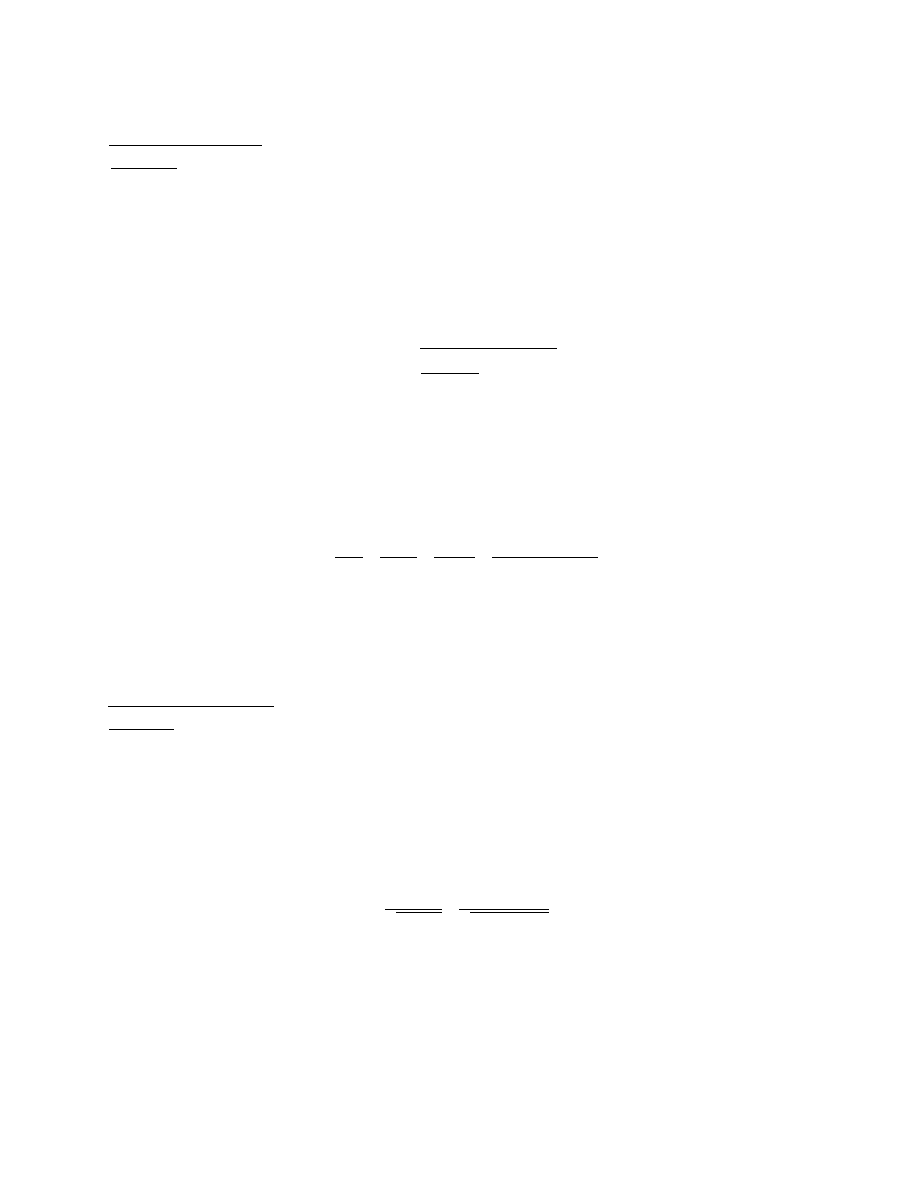
Efektiivsed pingekontsentratsiooni tegurid Kσ] ja Kτ saab tabelist 17 ning
mastaabitegurid Kdσ] ja Kdτ – tabelist 18.
Pinnatöötlustegur KF = 0,97 ... 0,90. Empiirilised tegurid ψτ = 0,1 – legeeritud ja
süsinikterastel ning ψσ] = 0,25 ... 0,3 – legeeritud ja ψσ] = 0,2 – süsinikterastel.
Seega Kσ] =1,6; Kτ =1,5; Kdσ] =0,82; Kdτ =0,7; KF =0,94; ψτ = 0,1; ψσ] = 0,2 (vt
Tabel 17 ja 18).
Varutegur paindele:
S
σ =
σ
−
1
Kσ
K
F∗K dσ
∙ σ
a +ψσ ∙ σm
kus amplituudpinge:
σ
a=
M
W
=
32
√M p1
2
+
M
p 2
2
πb d
r
3
=
32
√25,6
2
+
70,3
2
3,14 · 0,055
3
≈ 4,6 MPa
ja keskmineσ m=0.
26
S
σ =
245
1,6
0,94 ∙0,7
∙ 4,6+0,2∙ 0
≈ 21,9
Varutegur väändele:
S
τ =
τ
−
1
K τ
K
F ∙ K dτ
∙ τ
a +ψ τ ∙ τ m
kus keskmine- ja amplituudpinge:
τ
m=τ a=
τ
max
2
=
T
2 WP
=
16 T
2 πb d
r
3 =
16 ∙ 365,1
2∙ 3,14 ∙ 0,055
3 ≈ 5,6 MPa
siis
S
τ =
125
1,6
0,94 ∙ 0,7
∙3,7+0,1∙ 3,7
≈ 8,9
Seega üldvarutegur:
S=
S
τ Sσ
√Sτ
2
+
Sσ
2
=
21,9∗8,9
√21,9
2
+
8,9
2
≈ 8,2
Pidades silmas, et võlli jäikustugevust soovituslik üldvarutegur peaks olema piirises
[σ]S] = 2,5 ... 3, projekteeritava võlli väsimustugevus on tagatud. Võll on
alakoormatud. Võlli kuju ja mõõtmete optimeerimiseks võiks vajadusel vähendada
võlli läbimõõtu ja rummu pikkust.
27
Tabel 17. Kσ ja Kτ tegurite väärtused
Tabel 18. Kdσ ja Kdτ tegurite väärtused
6. Laagri kontrollarvtutus ning laagrisõlme kujundus
Väljundvõlli laagrite summaarsed toereaktsioonid:
RA=RAy =RBy = Fr/2 = 426 N ja RAx =RBx = Ft/2 = 1170,5 N
R
A =
√ RAx
2
+
R
Ay
2
=
√1170,5
2
+
426
2
=
1245 N
R
B=
√ RBx
2
+
R
By
2
=
√1170,5
2
+
426
2
=
1245 N
Seega mõlemad väljundvõlli laagrid on võrdselt koormatud ja taandatud koormus
laagrile(telgjõu mõju tuleb arvesse võtta ainult kuldhammastega hammasrataste
hammasülekannete korral):
Sirghammastega hammasrataste hammasülekannete korral taandatud
koormused laagriteleavalduvad kui PA = PB =P.
Võib teostada laagrikontrollarvutust või kasutada SKF kalkulaatorit.
Laagri kontrollarvutuses võtta arvesse ka tööiseloomu arvesse võtva teguri Krež ja
temperatuuriteguri KT, mis sõltub laagri kuumenemise astmest.
Krež = 1, kui on tegemist rahuliku koormusega ilma löökideta. Krež = 1,2, juhul kui
esineb mõõdukaid lööke ja esineb lühiajaline ülekoormus kuni 125 % .
Lintkonveierite korral soovitatakse võtta Krež = 1,1.
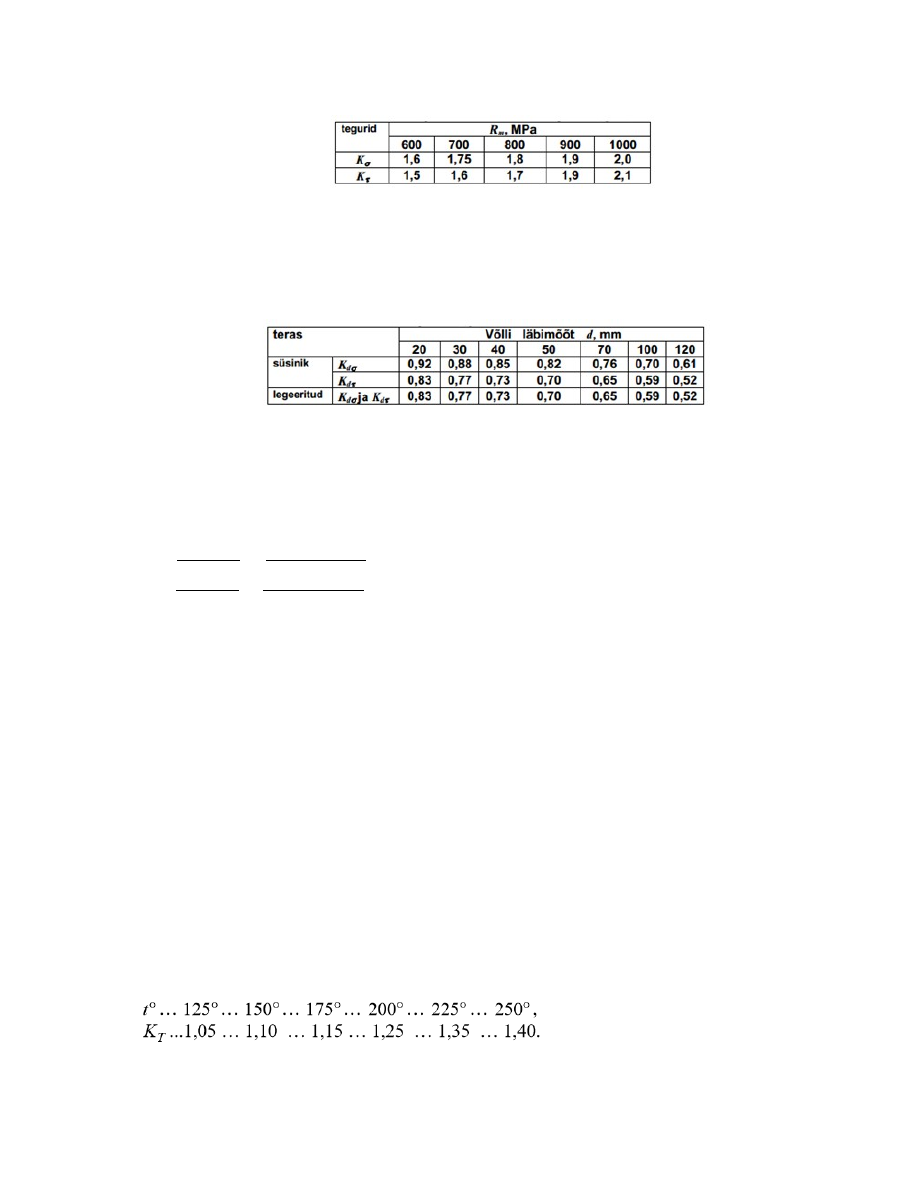
Tabel 19. temperatuuri teguri KT väärtused.
KT = 1,1, kuna eeldatakse, et laagrid võivad kuumeneda kuni 150° C.
28
Seega lõplik taandatud koormus laagritele on: Pl = P · Krež· KT = 1245 · 1,1 ·1,5 =
1506,7 N.
Arvutuslik ligikaudne laagri tööiga tundides on seega:
Lh=
10
6
60 n
(
C
Pl
)
α
=
10
6
60∙ 182,5
(
37,1
1,51
)
3
=
1,35 ∙10
6 tundi
Kus teise võlli ehk reduktori väljundvõlli pöörlemissagedus n2 = 182,5 1/min,
6210 laagri dünaamiline kandevõime on C= 37,1 kN ja α = 3, kui on tegemist
radiaalkuullaagritega.
Üldjuhul reduktorilaagrite tööiga peab olema suurem kui 36000 tundi, seega
laagrite 6210 tööiga on piisav.
Teostada ka SKF laagritööea kontroll. Näidisülesanne on saadaval Moodle e-
kursus õppematerjalide hulgas.
7. Korpuse projekteerimise aspekte ning hammasülekande määrimine
Korpus võib olla valatud terasest või malmist. Korpus koosneb kahest osast alus
ja kaas. Korpuse osade Lahutuspind peab ühtima võllide telje läbiva pinnaga.
Monteerimise lihtsustamiseks kasutatakse korpusel tõstesilmuseid. Õli juurde
lisamiseks korpusesse on ettenähtud korpuse ava.
Juhul kui reduktori hammasrataste kiirus ei ületa v = 3 m/s, siis võib kasutada
õlivann määrimist. Õli/määrdeaine hulk korpuse alumises osas peaks olema nii
suur, et 1/6 hammasratta läbimõõdust suur hammasratas oleks õlivanni sees.
Korpuse alumises osas tehakse ava õli vahetamiseks ning reduktori
puhastamiseks. Seejärel tehakse ava kate ehk kaas, see peaks olema silindrilise
või koonilise keermega + tihend.
Korpusele lisada jäikusribid ja õlivarras.
Reduktor asetatakse keevitatud raamile koos teiste ajami detailidega.
Allpool on toodud mõned olulised reduktori korpuse mõõtmed:
Korpuse seinapaksus δk = 0,0025 aw + 1 = 0,025 · 195 + 1 = 5,9 mm,
valitakse δk = 8 mm;
Laagri ava koht, seinapaksus b = 1,5 δk = 1,5 · 8 = 12 mm;
Vundamendi poltide läbimõõt dpolt1= (0,03…0,036) aw + 12 = 17,85 mm
(seega M18 või M20) ja poltide arv peaks olem suurem kui 4.
Karteri ehk korpuse alust ja kaant ühendavate poltide läbimõõt dpolt2 =
(0,5…0,6) dpolt1
29
Alumise korpuse osa ehk reduktori kinnitus keevitatud raami külge p =
(1,5 …2,5) δk
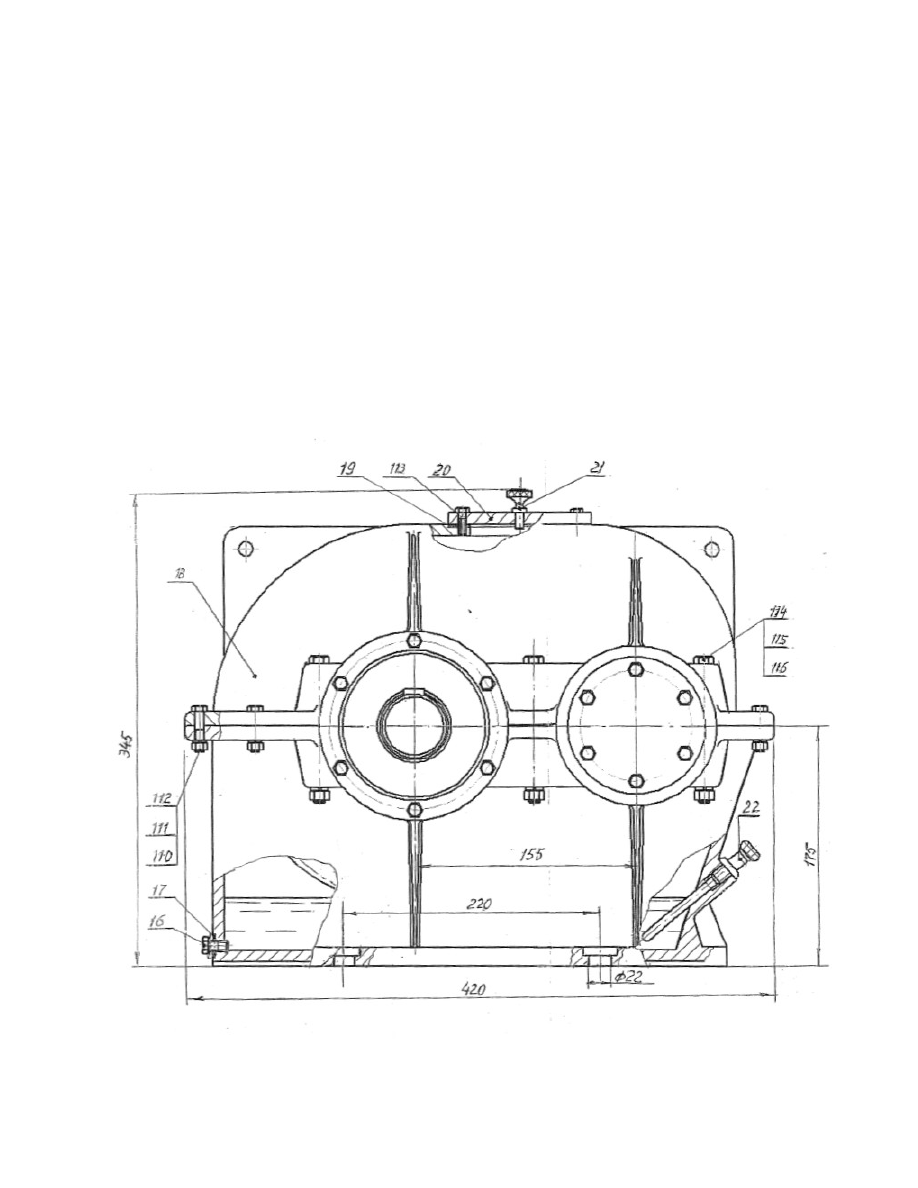
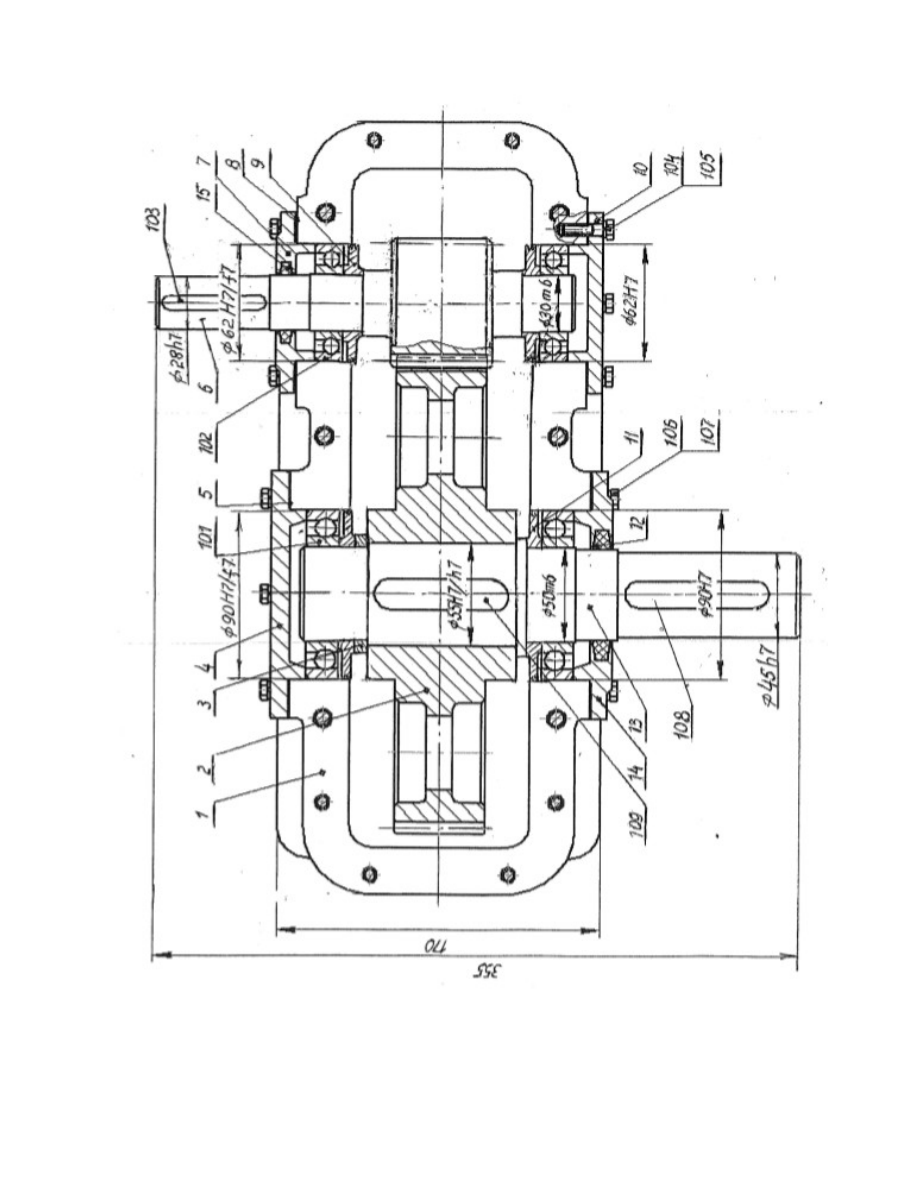
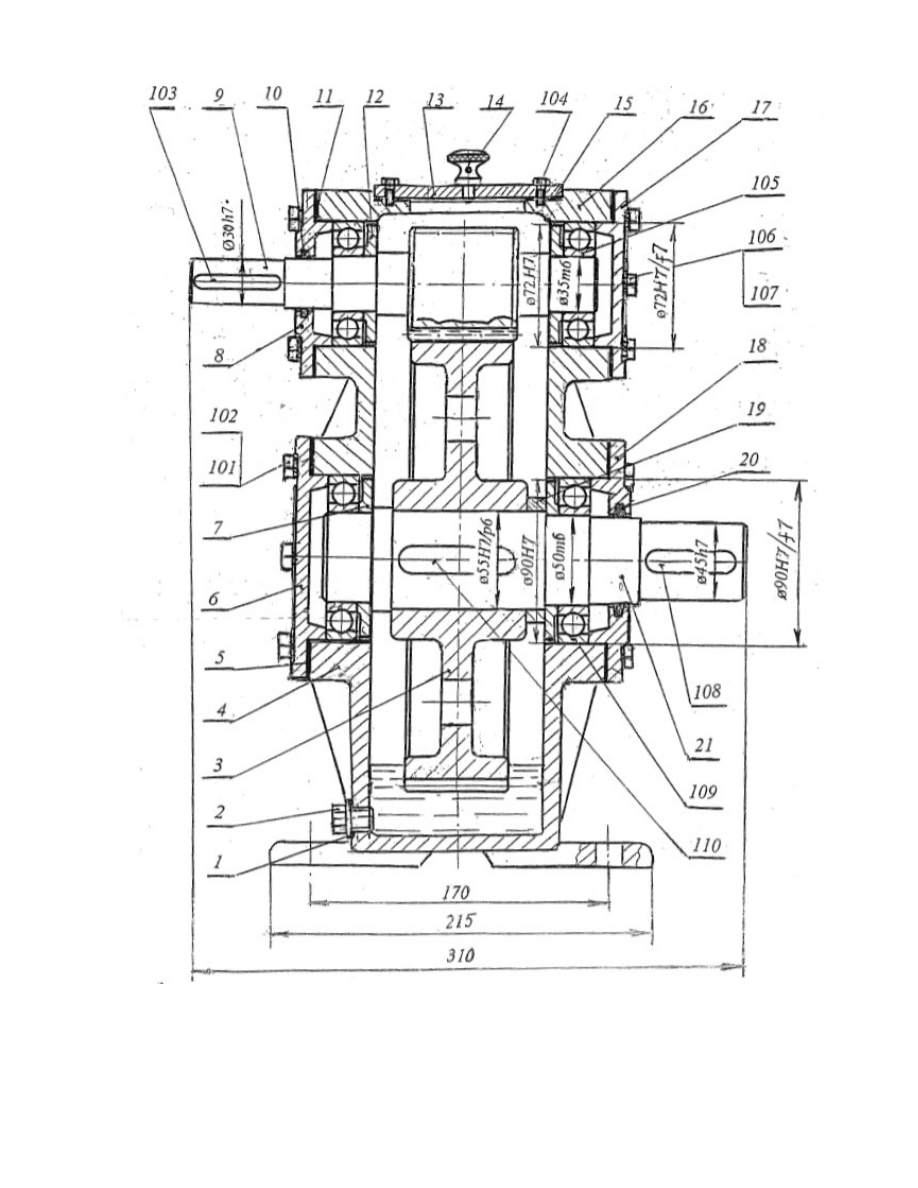
Lisa 1. Joonised (võimalikud lahendused)
Horisontaalne üheastmeline silindriline reduktor
30
31
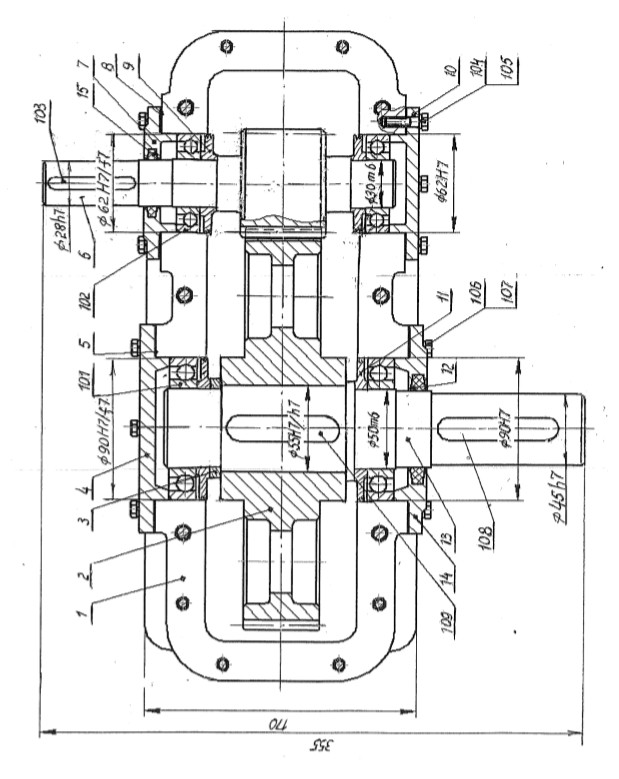
Horisontaalne üheastmeline silindriline reduktor
32
Horisontaalne üheastmeline silindriline reduktor
Spetsifikatsioonide tabel ehk Tükitabel
Nr
Tähis
tus
Nimetus
Hul
k
Märkused
Detailid
1
Reduktori korpus
1
valuteras
2
Suur Hammasratas
1
C45 EN10083 (peaks olema
standardsete detailide hulgas)
3
Vahepuks
1
S235
4
Suur Laagrikaas
1
S235
5
Suur Tihend
2
kumm
6
Väike Hammasratas
1
C45 EN10083 (peaks olema
standardsete detailide hulgas)
7
Väike Laagrikaas avaga
1
S235
8
Väike Tihend
2
kumm
9
Väike määret hoidev
Rõngas
2
S235
10
Väike Laagrikaas
1
S235
11
Suur määret hoidev
Rõngas
2
S235
12
Suur Rõngas Tihend
1
vilt
13
Veetav võll
1
C45 EN10083
14
Suur Laagrikaas avaga
1
S235
15
Väike Rõngas Tihend
1
vilt
16
Kork
1
S235
17
Korgi tihend
1
S235
18
Korpuse kaas
1
valuteras
19
Korpuse tihend
1
kumm
20
Korpuse vaateava kaas
1
valuteras
21
Korpuse vaateakna
käepide
1
S235
22
Õlivarras
1
S235
Standardsed detailid
10
1
Laager 6210
2
SKF tähistus
10
2
Laager 6207
2
SKF tähistus
10
3
Liist 10x8x60
1
Stand.tähistus
10
4
Polt M8x16
12
Stand.tähistus
10
5
Vedruseib 8
12
Stand.tähistus
10
6
Polt M10x20
12
Stand.tähistus
10
7
Vedruseib 10
12
Stand.tähistus
33
10
8
Liist 14x8x80
1
Stand.tähistus
10
9
Liist16x10x75
1
Stand.tähistus
11
0
Polt M14x35
6
Stand.tähistus
11
1
Vedruseib 14
6
Stand.tähistus
11
2
Mutter M14
6
Stand.tähistus
11
3
Polt M6x10
2
Stand.tähistus
11
4
Polt M6x70
4
Stand.tähistus
11
5
Vedruseib 16
4
Stand.tähistus
11
6
Mutter M16
4
Stand.tähistus
34
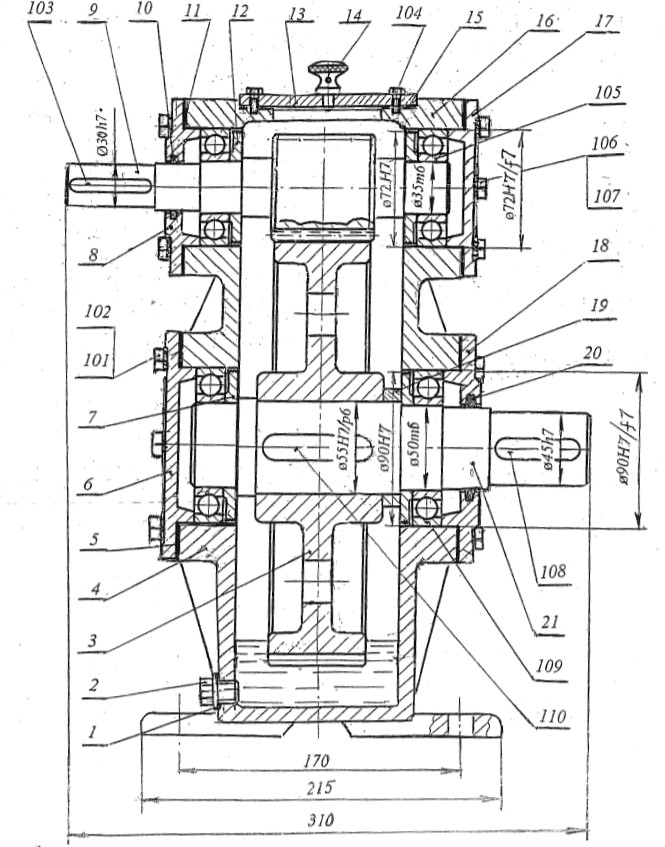
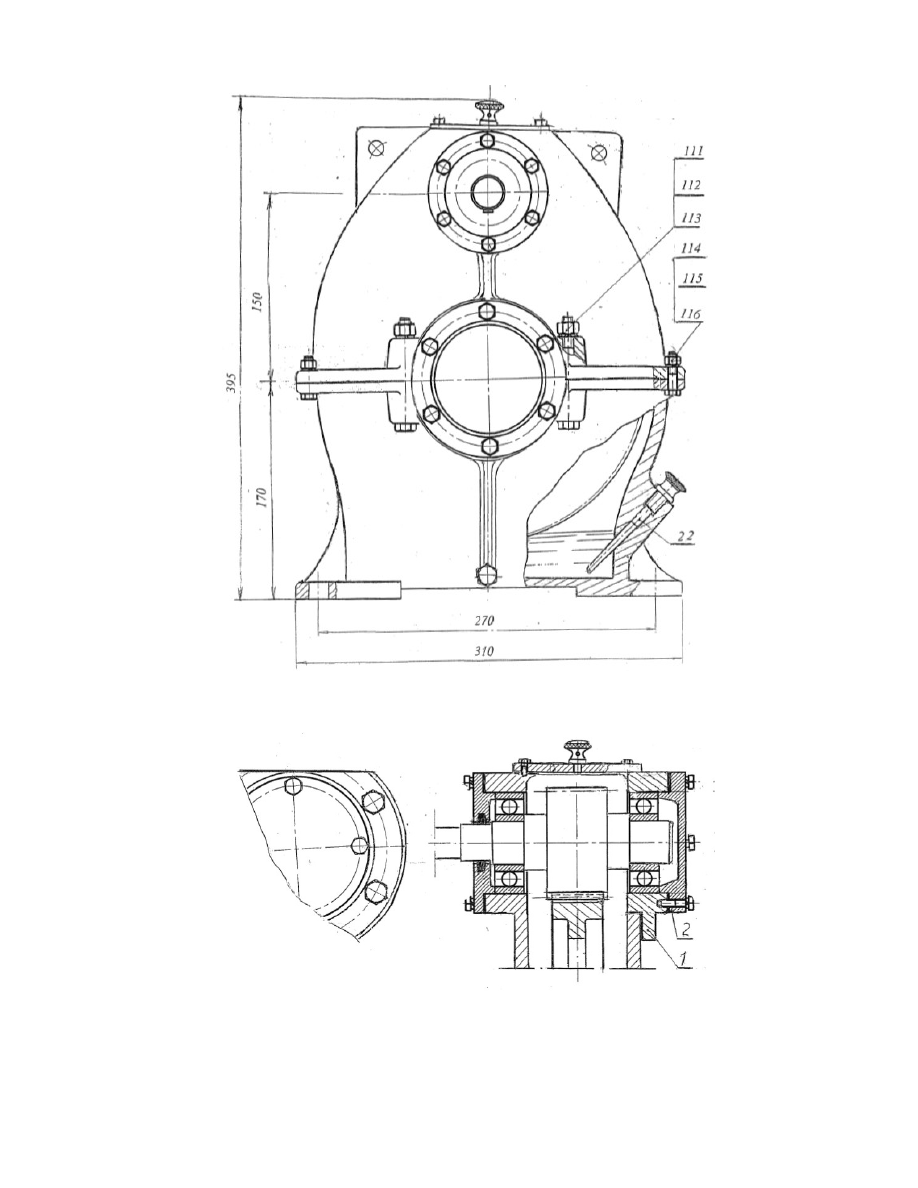
Vertikaalne üheastmeline silindriline reduktor
35
Vertikaalne üheastmeline silindriline reduktor
36
37
Document Outline
- Paindeväsimuse analüüs
- Hamba paindest tulenev ohtliku punkti tõmbepinge
- MPa, kus
- Geomeetriategur J = Y/K võtab arvesse Lewis’e teguri Y ja pingekontsentratsiooniteguri K.
- Tabel 4. AGMA geomeetriateguri J väärtused paindele hambumisnurga 20° ja sisselõiketa
- evelventprofiili jaoks väiksema ja suurema täpsusega hammasülekannetes
-
- Kui z1 = 26 ja väike täpsus =>J = ~0,25




























































Kõik kommentaarid