23.
Funktsiooni muudu esitus diferentsiaali ja jääkliikme summana.
Kuidaskäituvad diferentsiaal ja jääkliige argumendi muudu Δx suhtes, kui Δx
läheneb nullile ?
(tõestada!). Loetleda diferentsiaali omadused.Funktsiooni
muudu
peaosa ja jääkliige. Olgu antud funktsioon, mis on
diferentseeruv punktis a. Eeldame, et
f′(a)≠0
kasutades
mõisteid:
Δx
= x − a − argumendi muut kohal a
Δy
= f(x) − f(a) − funktsiooni muut kohal a .
Näitasime,
et
Seega
kui tähistame ja
f’(a) vahe järgmiselt :
Kehtib
võrdus
Püüame
avaldada funktsiooni muutu Δy argumendi muudu Δx kaudu. Selleks
avaldame
kõigepealt võrdusest suhte
ja
korrutame saadud
avaldise Δx-ga. Saame valemi
Valemist näeme, et funktsiooni muut Δy koosneb kahest liidetavast,
millest
esimene on diferentsiaal dy = f′(a)Δx ja teine on β.
Mõlemad
liidetavad on lõpmatult
kahanevad protsessis Δx → 0. Võrdleme
neid
suurusi Δx suhtes. Esiteks, eelduse f′(a) ≠ 0 põhjal saame :
Teiseks
kehtib valem :
Näeme,
et esimene liidetav, so diferentsiaal dy on sama järku lõpmatult
kahanev
suurus
kui Δx ja teine liidetav β on kõrgemat järku lõpmatult kahanev
suurus
Δx suhtes. Järelikult väikese Δx korral hakkab diferentsiaal
funktsiooni
muudu
avaldises domineerima. Seetõttu võime lugeda diferentsiaali dy
funktsiooni
muudu
peaosaks. jääkliikme β võib väikese Δx korral funktsiooni muudu
avaldises
ära jätta. Kehtib
ligikaudne valem
Δy
≈ dy kui Δx ≈ 0 .
Diferentsiaali
omadused.
1.
d(u + v) = du + dv,
2.
d(u − v) = du − dv,
3.
d(uv) = vdu + udv,
4.
d(Cu) = Cdu , C − konstant,
5.
d()
=
kui v ≠ 0.
24.
Funktsiooni
lokaalsete ekstreemumite definitsioonid .
Sõnastada ja tõestada Fermat ’ lemma .Öeldakse,
et funktsioonil f on punktis x1
lokaalne maksimum, kui
1.
funktsioon f on määratud punkti x1
mingis ümbruses (x1
− ϵ, x1
+ ϵ);
2.
iga x ∈
(x1
− ϵ, x1
+ ϵ) korral kehtib võrratus f(x) ≤ f(x1).
Öeldakse,
et funktsioonil f on punktis x1
lokaalne miinimum, kui
1.
funktsioon f on määratud punkti x1
mingis ümbruses (x1
− ϵ, x1
+ ϵ);
2.
iga x ∈
(x1
− ϵ, x1
+ ϵ) korral kehtib võrratus f(x) ≥ f(x1).
Funktsiooni
lokaalseid maksimume ja miinimume nimetatakse selle funktsiooni
lokaalseteks
ekstreemumiteks.
Fermat'
lemma - Kui funktsioonil f on punktis x1 lokaalne
ekstreemum ja funktsioon on diferentseeruv selles punktis, siis
f′(x1)
= 0.
Tõestus
: funktsioonil f on punktis x1 lokaalne maksimum.
Siis,
vastavalt lokaalse
maksimumi definitsioonile, leidub punkti x1 ümbrus
nii,
et
iga x korral sellest ümbrusest kehtib võrratus
Selles
ümbruses asuva arvu x me saame võtta punktist x1 nii vasakult kui
ka
paremalt.
Asugu x punktist x1 vasakul. Siis x − x1 Jagame võrratuse negatiivse arvuga x − x1. Kuna negatiivse arvuga jagamisel
võrratuse
märk
muutub vastupidiseks, saame
See
võrratus jääb kehtima ka siis, kui me võtame temast piirväärtuse
protsessis
x
→ x1. Seega tuletise definitsiooni põhjal
Järgnevalt
olgu x punktist x1 paremal. Siis x − x1 > 0.
Jagades võrratuse
positiivse
arvuga x − x1 saame
Võtame
piirväärtuse:
Võrratused ja näitavad, et f′(x1) ≥ 0 ja f′(x1) ≤ 0. See on
võimalik
vaid siis, kui f′(x1) = 0. Seega on lemma tõestatud juhul, kui
x1-s on
lokaalne
miinimum. Analoogiliselt saab käsitleda ka juhtu, kui x1-s on
lokaalne
miinimum.
25.
Sõnastada ja tõestada Rolle’i teoreem . Rolle’i teoreemi
geomeetriline sisu. Sõnastada ja tõestada Cauchy teoreem . Sõnastada
ja tõestada Lagrange ’i teoreem. Lagrange’i teoreemi
geomeetriline sisu.Rolle'i
teoreem. Kui
funktsioon f on lõigul [
a,
b]
pidev,
vahemikus (
a,
b)
diferentseeruv
ja rahuldab tingimust f(
a)
=
f(
b)
,
siis leidub vahemikus (
a,
b)
vähemalt
üks punkt c nii, et
f′(
c)
= 0
.Tõestus.
Kuna
f(
x)
on pidev lõigul [
a,
b], siis saavutab
ta oma suurima ja vähima väärtuse sellel lõigul.
Olgu
M suurim
väärtus ja
m vähim
väärtus. Kui
M =
m,
siis on funktsioon lõigul [
a,
b]
konstantne , st
kõigi
x ∈
[
a,
b] korral kehtib
f(
x)
=
M =
m.
Sellisel juhul on
f(
x)
tuletis nullfunktsioon, st
f′(
x)
≡ 0,
ja teoreemi väide on täidetud iga
c
∈
(
a,
b) korral.
Edasi
vaatleme juhtu, kui
M≠
m.
Funktsioon võib oma absoluutse ekstreemumi saavutada kas lõigu [
a,
b] otspunktis või
vahemikus (
a, b).
Funktsioon
f(
x)
peab vähemalt ühe oma absoluutsetest ekstreemumitest (kas suurima
või vähima väärtuse)
saavutama vahemikus (
a,
b)
asuvas punktis.
Tähistame selle punkti
c-ga.
Kuna vahemikus (
a,
b) asuv absoluutne
ekstreemum on ühtlasi ka lokaalne ekstreemum, omab funktsioon
f
lokaalset
ekstreemumit punktis
c.
Peale selle on
f
teoreemi
eelduste põhjal diferentseeruv punktis
c.
Järelikult, Fermat’ lemma põhjal saame
f′(
c)
= 0. Teoreem on tõestatud.
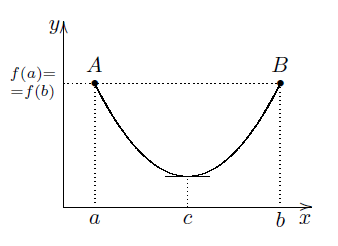
Rolle’i
teoreemil on lihtne
geomeetriline
sisu. See on
järgmine. Nimelt teoreemi eeldustel on funktsiooni
y
=
f(
x)
graafik sile joon, mille otspunktid
A
= (
a,
f(
a))
ja
B =
(
b, f(
b))
asuvad
x-telje
suhtes samal kõrgusel. Teoreem väidab, et sellisel juhul leidub
vahemikus (
a, b)
vähemalt üks punkt
c,
mille korral funktsiooni tuletis on null, st funktsiooni graafiku
puutuja on paralleelne
x- teljega .
Teoreem
3.5 (Cauchy teoreem).
Kui funktsioonid f
ja g on lõigul [
a,
b]
pidevad ,
vahemikus (
a,
b)
diferentseeruvad
ja iga x ∈
(
a,
b)
korral
kehtib võrratusg′(
x)
≠0
,
siis leidub vahemikus (
a,
b)
vähemalt
üks punkt c nii, etTõestus.
Defineerime järgmise funktsiooni:
Arvutame:
Seega
F(
a)
=
F(
b).
Ühtlasi on
F(
x)
pidev lõigul [
a, b]
ja diferentseeruv vahemikus (
a,
b). Järelikult
rahuldab
F(
x)
Rolle’i teoreemi eeldusi. Rolle’i teoreemi põhjal leidub
vahemikus
(
a,
b) vähemalt üks
punkt
c nii,
et
F′(
c)
= 0.
Leiame
funktsiooni
F(
x)
tuletise:
Seega
Siit
järeldub, et
Jagades
suurusega
g′(
c),
mis eelduse tõttu erineb nullist, saame valemi .
Teoreem on tõestatud.
Teoreem
3.6 (Lagrange'i teoreem).
Kui funktsioon f on
l~oigul [
a,
b]
pidev
ja vahemikus
(
a,
b)
diferentseeruv,
siis leidub vahemikus (
a,
b)
vähemalt
üks punkt c nii, etTõestus.
Lagrange’i teoreem on Cauchy teoreemi erijuht. Tõepoolest, võttes
Cauchy teoreemis
g(
x)
=
x saame
g(
b)
=
b,
g(
a)
=
a,
g′(
c)
= 1 ja
valemist
järeldubki .
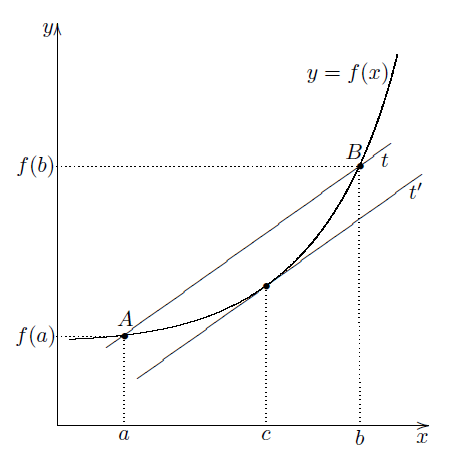
Lagrange’i
teoreemi geomeetrilist sisu
vaatleme jooniselt. Punktidest
A
= (
a,
f(
a))
ja
B =
(
b, f(
b))
läbi tõmmatud lõikaja
t
tõus võrdub
suhtega
Viime
paralleellükkega sirge
t
uude asendisse nii,
et saadud uus sirge
t′
oleks joone
y
=
f(
x)
puutuja. Tähistame puutepunkti
x-koordinaadi
c-ga.
Kuna funktsiooni graafiku puutuja tõus võrdub funktsiooni
tuletisega vaadeldavas punktis, siis sirge
t′
tõus on
f′(
c).
Kuna
sirged t ja
t′
on paralleelsed,
siis on nende tõusud omavahel võrdsed, seega
Korrutades
b −
a-ga
saame valemi .
Kokkuvõttes:
Lagrange’i teoreem väidab, et
sileda joone lõikaja saab
paralleellükkega viia selle joone puutujaks.
26. Sõnastada ja
tõestada l’ Hospitali reegel 0/0 tüüpi määramatuse korral.l’Hospitali
reegli põhjal saab 0/0 tüüpi määramatusega piirväärtuse
arvutamisel üle minna piirväärtusele, mille all esineb
esialgse murru lugeja tuletise ja nimetaja tuletise
jagatis .
Tuletamine .
Arvutame lim┬(x→0)〖
sinx /x〗.
Elementaarfunktsioon sinx/x ei ole x = 0 korral määratud (tekib
määramatus 0/0). Piirväärtuse arvutamisel kasutame l’Hospitali
reeglit:
27.
Kõrgemat järku tuletiste ja diferentsiaalide definitsioonid.
Tuletada kõrgemat järku diferentsiaalide valemid. Olgu
funktsioon y = f(x) diferentseeruv hulgas D. Siis on tema tuletis f′
hulgas D määratud funktsioon. Oletame, et f′ on samuti
diferentseeruv hulgas D. Siis saame me arvutada funktsiooni f′
tuletise ehk funktsiooni f teise tuletise, mida tähistatakse f′′.
Seda protseduuri võib jätkata. Funktsiooni f teise tuletise
diferentseerimisel saame selle funktsiooni
kolmanda
tuletise f′′′ jne.
Funktsiooni
y = f(x) n-järku tuletiseks nimetatakse selle funktsiooni n – 1 -
järku tuletise tuletist ja tähistatakse f(n). Lõplikku n-järku
tuletist omavat funktsiooni nimetatakse n-korda diferentseeruvaks.
Kui
funktsioonil on olemas kõik
tuletised f(n), kus n = 1, 2, 3, . . .,
ja neil on lõplikud väärtused, siis nimetatakse seda funktsiooni
lõpmata arv
kordi diferentseeruvaks.
Kõrgemat
järku
diferentsiaalid .
dy(x)
= f’(x)dx
Selles
tähistuses on diferentsiaal argumendi x funktsioon. Kui see
funktsioon on piisavalt heade omadustega, võib temast uuesti
diferentsiaali arvutada. Niiviisi saame me funktsiooni f teist järku
diferentsiaali. Seda tähistatakse d^2 y.
Tuletame
valemi teist järku diferentsiaali jaoks:
Seega
d^2
y(x)=f^'' (x)dx^2.
Võttes
teist järku diferentsiaalist diferentsiaali saame kolmandat järku
diferentsiaali d^3 y.
Järelikult
d^3
y(x)=f^''' (x)〖dx〗^3.
Seda
protseduuri võib jätkata.
Funktsiooni
y = f(x) n-järku diferentsiaaliks nimetatakse selle funktsiooni n −
1 - järku diferentsiaali diferentsiaali ja tähistatakse〖
d〗^n
y . Kehtib valem
d^n
y(x)=f^((n) ) (x) 〖dx〗^n.
Lõpuks
märgime, et jagades selle võrduse mõlemaid pooli suurusega dx^n
saame
järgmise
valemi n-järku tuletise jaoks:
(d^n
y)/(dx^n )=f^((n) ) (x).
28.
Funktsiooni Taylori polünoom (tuletada vastav valem). Millal
nimetatakseTaylori polünoomi
McLaurini polünoomiks?Taylori
polünoom. Mitmetes
matemaatika rakendustes on vaja leida
keerulistele funktsioonidele lihtsaid lähendeid. Enamasti
konstrueeritakse taolised lähendid polünoomide hulgast. Polünoomiga
on lihtne opereerida. Polünoomi väärtuse arvutamisel tuleb ju
teostada ainult aritmeetilisi tehteid (liitmist, lahutamist,
korrutamist ja jagamist). Näiteks taskuarvuti leiab funktsioonide
a^x, sin x jms tegelike väärtuste asemel nende funktsioonide
polünomiaalsete lühendite väärtusi. Polünoomi on lihtne ka
diferentseerida ja integreerida. Seetõttu kasutatakse polünomiaalset
lähendamist inseneriteadustes üsna palju.
Käsitlesime
f(x) funktsiooni lineaarset lähendit punkti x = a üumbruses, mis
avaldub valemiga
P_1
(x)=f(a)+f^' (a)(x-a).
Funktsioon
P1(x) koos oma tuletisega langeb punktis x = a kokku funktsiooniga
f(x), st
P_1
(a)=f(a),P_1^' (a)=f^' (a).
Polünoomi
P_n nimetatakse funktsiooni f Taylori polünoomiks ehk n-järku
lähendiks punkti a ümbruses.
Kui
x ≈ a, siis kehtib ligikaudne valem
f(x)≈P_n
(x).
Kui
a = 0, siis nimetatakse Taylori poünoomi ka McLaurini polünoomiks.
Seega on funktsiooni f(x) McLaurini polünoom järgmine:
29.
Funktsiooni kasvamise ja kahanemise seos tuletise märgiga. Tõestada
vastav teoreem.
Teoreem
: Olgu funktsioon f diferentseeruv vahemikus (a, b). Siis kehtivad
järgmised väited:
1.
Kui f′(x) > 0 iga x ∈
(a, b) korral, siis f on kasvav vahemikus (a, b).
2.
Kui f′(x)
Tõestus.
Tõestame väite 1. Olgu f′(x) > 0 iga x ∈
(a, b) korral. Valime vahemikus (a, b) kaks
suvalist punkti x1
ja x2
nii et x1
Lagrange’i
teoreemi põhjal leidub vahemikus (x1,
x2)
vähemalt üks punkt c nii, et kehtib võrdus
f(x2)
− f(x1)
= f′(c)(x2
− x1)
.
Selle
võrduse paremal poolel olev tuletis f′(c) on nullist suurem, kuna
me eeldasime f′(x) positiivsust vahemikus (a, b). Nullist suurem on
ka vahe x2
− x1,
kuna me
valisime punktid x1
ja x2
selliselt , et x1 0. Sellest järeldubki soovitud võrratus f(x1)
30.
Funktsiooni kriitilise punkti definitsioon. Funktsiooni lokaalse
ekstreemumi tarvilik tingimus. Tarviliku tingimuse põhjendus.
Funktsiooni lokaalsete ekstreemumite piisavad tingimused. Piisavate
tingimuste põhjendused.Funktsiooni
kriitilisteks punktideks
(ehk esimest järku kriitilisteks punktideks) nimetatakse
funktsiooni argumendi väärtusi, mille korral tuletis võrdub
nulliga või lõplik tuletis puudub.
Teoreem:
Lokaalse ekstreemumi
tarvilik tingimus.
Kui funktsioonil f on punktis x1
lokaalne ekstreemum, siis on x1
selle funktsiooni kriitiline punkt.
Siinkohal tuleb rõhutada
seda, et teoreemile
vastupidine väide ei kehti. See tähendab, et
igas
kriitilises punktis ei tarvitse ekstreemumit olla ehk
funktsioonil võib olla selliseid kriitilisi punkte, kus ekstreemumit
ei ole.
Teoreem:
Lokaalse ekstreemumi piisav tingimus I.
Olgu x1
funktsiooni f kriitiline punkt.
1)
Kui läbides punkti x1
vasakult paremale funktsiooni tuletise märk muutub plussist
miinuseks, siis on funktsioonil selles punktis lokaalne maksimum.
2)
Kui aga läbides punkti x1
vasakult paremale funktsiooni tuletise märk muutub miinusest
plussiks, siis on funktsioonil selles punktis lokaalne miinimum.
Vaata
lk 90 joonist 4.2!
Teoreem:
Lokaalse ekstreemumi piisav tingimus II.
Olgu funktsiooni f kriitiline punkt x1
selline, et f′(x1)
= 0.
1)Kui
f′′(x1)
2)Kui
aga f′′(x1)
> 0, siis on funktsioonil f punktis x1
lokaalne miinimum.
Kui
funktsioonil eksisteerivad esimest ja teist järku tuletised
kriitilises punktis, siis saab lokaalsete ekstreemumite olemasolu
kontrollida ka teise tuletise märgi abil. Joonisel 4.2 toodud juhul
1 on funktsiooni graafik miinimumpunkti ümbruses nõgus, (ülespoole
kaarduv) ja juhul 2 on graafik maksimumpunkti ümbruses
kumer (allapoole kaarduv). Graafik on nõgus, kui funktsiooni teine
tuletis on positiivne, ja kumer, kui teine tuletis on negatiivne.
31.
Nõgusa
ja kumera joone definitsioonid.
Öeldakse, et joon
y
=
f(
x)
on
nõgus,
kui liikudes vasakult paremale selle joone puutuja tõus suureneb.
Öeldakse, et joon
y
=
f(
x)
on
kumer,
kui liikudes vasakult paremale selle joone puutuja tõus väheneb.
Kospekti
joonisel (lk 93) 4.4 vasakpoolsel graafikul on kujutatud
nõgusat
joont. Liikudes
vasakult
paremale joone puutuja tõus suureneb ja seega joon kaardub
ülespoole. Parempoolsel on kujutatatud
kumerat
joont. Liikudes
vasakult paremale joone puutuja tõus väheneb ja joon kaardub
allapoole.
Nõgususe
ja kumeruse seos teist järku tuletise märgiga. Põhjendus.Põhjendus: Seal, kus
f
‘ kasvab, on joon
y =
f(
x)
nõgus ja seal, kus
f
‘ kahaneb, on
joon
y =
f(
x)
kumer. Kuid
f’ kasvamine ja
kahanemine on ju seotud
f′′
märgiga. Siis
same kirjutada järgmised
laused :
1.
Kui
f′′(
x)
> 0
iga
x ∈
(
a,
b) korral, siis on
f
‘ kasvav
vahemikus (
a, b).
2.
Kui
f′′(
x)
0
iga x ∈
(a,
b) korral, siis on
f
‘ kahanev
vahemikus (a, b).
Nende
lausete põhjal saame sõnastada järgmise teoreemi:
Teoreem
4.5. Olgu
funktsioon f kaks korda diferentseeruv vahemikus (a,
b).
Siis kehtivad järgmised väited:
1.
Kui f′′(x)
> 0
iga x ∈
(a,
b) korral,
siis on joon y = f(x)
nõgus vahemikus (a,
b).
2.
Kui f′′(x)
Joone
käänupunktid. Punkti,
mis eraldab pideva joone kumerat osa nõgusast, nimetatakse selle
joone käänupunktiks.
Käänupunkti
tarvilik tingimus koos põhjendusega. Teoreem:
Käänupunkti
tarvilik tingimus.
Kui P =
(x1,
f(x1))
on joone y =
f(x)
käänupunkt, siis x1
on funktsiooni f teist
järku kriitiline punkt.
Põhjendus:
Funktsiooni
argumendi väärtusi, mille korral teist järku tuletis võrdub
nulliga
või
lõplik teist järku tuletis puudub, nimetatakse selle funktsiooni
teist järku
kriitilisteks punktideks.
Käänupunkti
piisav tingimus koos põhjendusega. Teoreem:
Käänupunkti piisav tingimus. Olgu
x1 funktsiooni
f teist järku kriitiline punkt. Kui läbides seda punkti funktsiooni
teine tuletis muudab. märki, siis on P =
(x1,
f(x1))
joone y =
f(x)
käänupunkt.
Põhjendus:
Kui f′′(x)
on väiksem nullist punktist x1-st
vasakul ja suurem nullist punktist x1
paremal. Siis on joon y
= f(x)
kumer punktist x1
vasakul ja nõgus punktist x1
paremal. Punktis P =
(x1,
f(x1))
asendub kumerus nõgususega, seega on P
= (x1,
f(x1))
käänupunkt.
32. Joone
asümptoodi definitsioon:
Vaatleme tasandil xy
- teljestikus joont
y =
f(x).
Sirget l nimetatakse
joone y =
f(x)
asümptoodiks,
kui joone y =
f(x) jooksva punkti eemaldumisel lõpmatusse selle punkti kaugus sirgest l
läheneb nullile.
Vertikaalasümptoodid.
Need on y-teljega
paralleelsed sirged. Asümptoodi võrrand on x
= a.
Olgu
sirge x =
a joone
y =
f(x)
vertikaalasõmptoot.
Kui punkt M =
(x, y)
eemaldub lõpmatusse joont y
= f(x),
siis vastavalt asümptoodi definitsioonile tema kaugus sirgest x
= a
läheneb nullile.
Seega peab punkti M
x- koordinaat lähenema arvule a
kas vasakult või
paremalt, st kas x →
a−
või x
→ a+.
Teisest küljest: kuna punkti M kaugus
koordinaatide alguspunktist kasvab piiramatult, siis peab vähemalt
üks selle punkti koordinaatidest piiramatult kasvama. Nagu nägime,
x koordinaat
läheneb lõplikule arvule a.
Seega kasvab punkti y-koordinaat
piiramatult, st kas y
→ −∞ või
y →
∞. Me saame formuleerida järgmise väite.
Sirge
x = a
on joone y = f(x)
asümptoodiks siis
ja ainult siis, kui kehtib vähemalt üks järgmistest
piirväärtustest:
lim
f (x) = −∞ lim
f (x)= ∞
x→a−
x→a−
lim
f(x)
= −∞ lim f(x) =∞
x→a+ x →a+
Kaldasümptoot
ja horisontaalasümptoot.
Kaldasümptoodid.
Need on sirged, mis ei ole paralleelsed y-teljega.
Asümptoodi võrrand on
y=kx
+ b,
kus k on
asümptoodi tõus. Kaldasümptoodi erijuht on horisontaalasümptoot,
mis on paralleelne x-teljega.
Tõus k on
sellisel juhul võrdne nulliga, st asümptoodi võrrand on y
= b.
Tultada
valemid kaldasümptoodi võrrandi kordajate jaoks piirprotsessis x
→ ∞.
Kui
x →
∞, siis eemaldub
punkt M =
(x, f(x))
lõpmatusse mööda joont y
= f(x).
Kuna y =
kx+b
on joone y
= f(x)
asümptoot, siis punkti M kaugus sirgest y
= kx
+ b
läheneb nullile.
Tähistame punkti M
ristprojektsiooni
sirgel y =
kx +
b tähega
P.
Kuna punkti M kaugus
sirgest y =
kx +
b võrdub
lõigu MP pikkusega
|MP|,
saame
lim|MP|
= 0 . (4.2)
x→∞
Ühtlasi
näeme jooniselt, et |MN|
= |MP|
/cos α ,
kus α on
asümptoodi tõusunurk. Kuna α
jab muutumatuks
protsessis x →
∞, siis (4.2)
põhjal
lim|MN|
= lim |MP|
/cos α
= 1 lim
|MP|
= 0 (4.3)
x→∞ x→∞ cos
α x→∞
Edasi paneme tähele, et |MN|
võrdub
funktsioonide f(x)
ja kx +
b väärtuste
vahega, st
|MN|
= f(x)
− kx
− b.
Seega
võrduse (4.3) põhjal
Lim[f(x)
− kx
− b]
= 0 (4.4)
x→∞.
Tuues x sulgude
ette saame
Lim
x [f(x)
− k
− b]=
0
x→∞ x x
Selles
valemis oleva korrutise x·[f(x)−
k –
b]
x x
esimene
tegur x läheneb
lõpmatusele, kuid korrutis ise läheneb nullile. Järelikult peab
teine tegur lähenema nullile, st
lim [f(x)−
k −
b]=
0 .
x→∞ x x
Selles
avaldises b→
0, kui x
→ ∞.
Seega
x
lim [f(x)−
k]=
0 ehk lim f(x)−
k =
0 ehk k =
lim f(x) (4.5)
x→∞ x x→∞ x x→∞ x
Võrdusest
(4.4) saame veel
b
= lim[f(x)
− kx]
x→∞ (Vaadake lk 99)
33.
Algfunktsiooni mõiste.
Funktsiooni F
nimetatakse
funktsiooni f
algfunktsiooniks
hulgas
D,
kui iga x kuulub
D korral
kehtib võrdus F
′(x)
= f(x).
Sõnastada ja
tostada teoreem algfunktsioonide üldavaldise kohta.
Teoreem
5.1. Kui F on
funktsiooni f algfunktsioon hulgas D, siis kõik funktsiooni f
algfunktsioonid hulgas D avalduvad kujul F +
C, kus C on suvaline konstant.
Tõestus.
Olgu F
funktsiooni f
algfunktsioon
hulgas D.
Kõigepealt kontrollime kas funktsioonid kujul F+C,
kus C on
konstant, on tõepoolest f
algfunktsioonid
hulgas D.
Kuna F′(x)
= f(x)
iga x kuulub
D korral,
siis
[F(x)
+ C]′=
F′(x)
+ C′=
F′(x)
= f(x)
iga x ∈
D korral,
mis näitab, et suvaline funktsioon F
+ C,
kus C on
konstant, on tõesti f
algfunktsioon
hulgas D.
Tõestame
nüüd teoreemi väite: f-i
kõik algfunktsioonid hulgas D
avalduvad kujul F
+C.
Selleks oletame vastuväiteliselt, et f-l
leidub algfunktsioon G,
mis ei avaldu kujul F
+C.
Arvutame G ja
F vahe
tuletise. Kuna G ja
F on
ühe ja sama funktsiooni f
algfunktsioonid
hulgas D,
siis saame
(G(x)
− F(x))′
= G′(x)
− F′(x)
= f(x)
− f(x)
= 0 iga x kuulub
D korral.
Nulltuletist
omab aga ainult konstantne funktsioon. Seega G
− F
= C,
kus C
on mingi konstant.
Viimasest võrdusest saame seose G
= F
+C,
mis näitab, et G
ikkagi avaldub
kujul F +
C.
Jõudsime vastuolule. Teoreem on tõestatud.
Määramata
integraali mõiste. Funktsiooni
f algfunktsioonide
üldavaldist F(x)+C,
kus C
on konstant,
nimetatakse funktsiooni f
määramata integraaliks ja
tähistatakse ∫
f(x)dx.
Seega definitsiooni kohaselt ∫
f(x)dx
= F(x)
+ C , C −
konstant .
Geomeetriline
sisu
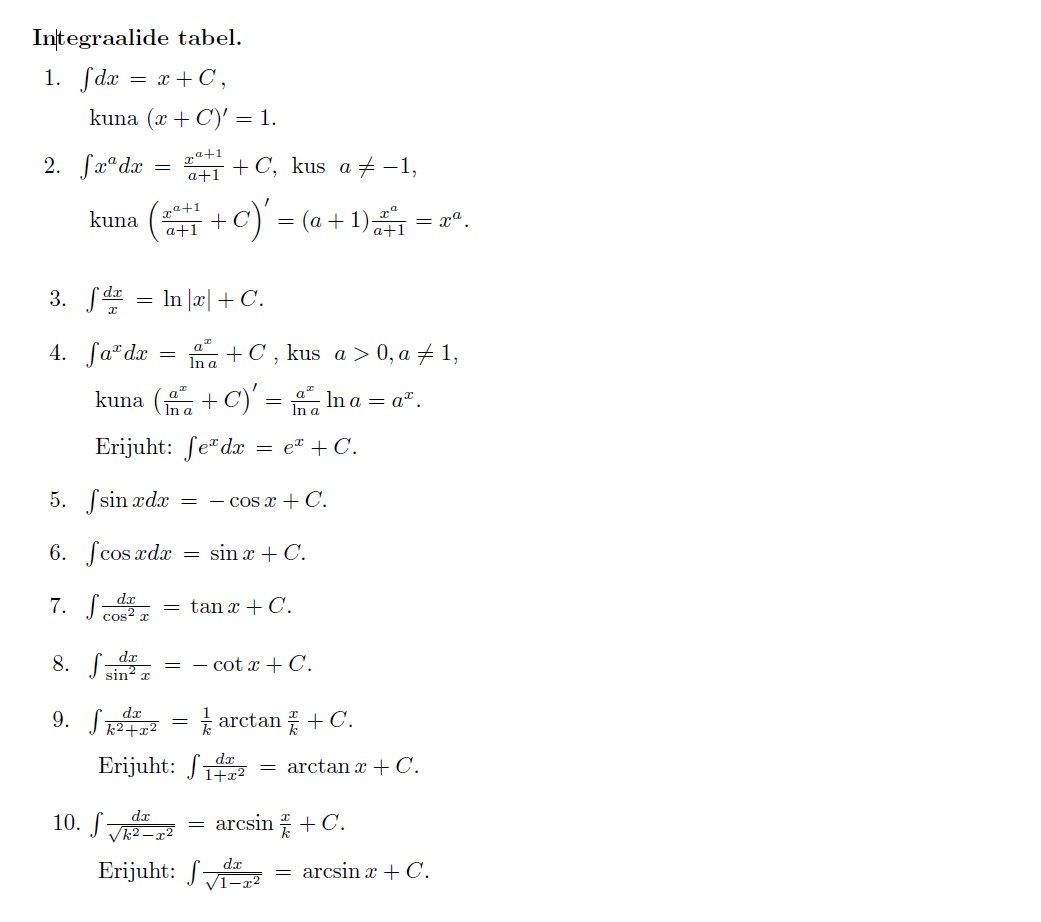
34. Integraalide tabel
35.
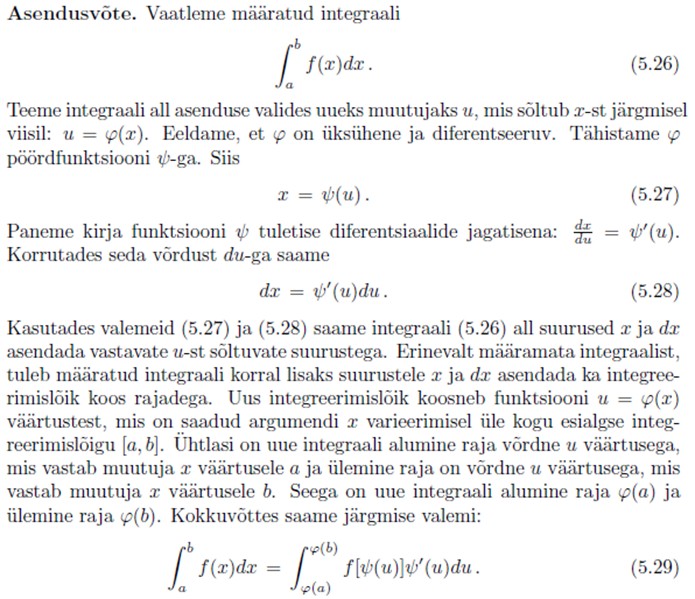
Kirjeldada asendusvõtet määramata integraali avaldamisel. Tuletada ositi integreerimise valem määramata integraali jaoks.
Vaatleme
määramata integraali
(5.2)
Integraali
(5.2) avaldamisel asendusvõottega tehakse selle integraali all muutuja
vahetus.
Selleks valitakse mingi funktsioon
u
= φ(x)
ja integreerimine muutuja x
järgi asendatakse
integreerimisega muutuja u
järgi.
Eeldame,
et φ on
üksühene ja diferentseeruv. Tähistame funktsiooni φ
pöördfunktsiooni
ψ-ga.
Seega
x
= ψ(u) (5.3)
Paneme
kirja funktsiooni ψ
tuletise
diferentsiaalide jagatisena:
Korrutades
seda võrdust du-ga saame
dx
=
ψ’(u)du (5.4)
Kasutades
valemeid (5.3) ja (5.4) asendame x ja dx
integraali (5.2)
all. Saame
avaldise
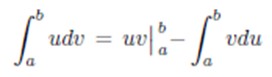
Ositi
integreerimine.
Olgu u = u(x) ja v = v(x) kaks diferentseeruvat funktsiooni. Paneme
kirja nende korrutise diferentsiaali avaldise (vt. Diferentsiaali
omadus 3 §3.3)
d(uv)
= vdu +
udv
Integreerime
seda avaldist . Saame:
Kuna
∫d(uv)
= uv +
C integraalide
tabeli valemi 1 põhjal, siis
Konstandi
C võib
sellest valemist välja jätta, sest mõlemad määramata integraalid ∫udv ja∫vdu sisaldavad juba määramata konstante .
Viies∫vdu võrduseteisele poolele saame
Saadud avaldis kannab ositi integreerimise valemi nime
36.
Funktsiooni integraalsumma ja määratud integraali mõisted.
Integraalsumma
mõiste.
Olgu
antud funktsioon f,
mis on pidev lõigul
[a, b].
Jaotame lõigu [a,
b] n
osalõiguks
punktidega x0,
x1,
x2,
. . . , xn, kusjuures
a
= x0
1
2
n
= b.
Tähistame
järjekorras i-nda
osalõigu pikkuse sümboliga Δxi
, st
Valime
igal osalõigul [xi−1,
xi]
ühe punkti pi.
Moodustame summa:
Seda summat nimetatakse funktsiooni f
integraalsummaks lõigul
[a, b].
Määratud
integraali mõiste.
Tähistame pikima osalõigu pikkuse sümboliga ϱn,
st ϱn
= max<.
Muudame lõigu [
a,
b] tükeldust
järjest peenemaks selliselt, et pikima osalõigu pikkus
ϱn
läheneb nullile.
Kui
f on
pidev lõigul [
a,
b], siis on
integraalsummal
Sn
taolises
piirprotsessis lõplik piirväärtus.
Seda
piirväärtust nimetatakse funktsiooni
f
määratud integraaliks lõigul
[
a, b]
ja tähistatakse
Seega
definitsiooni kohaselt
37.
Töö arvutamine sirgjoonelisel liikumisel muutuvas jõuväljas.
Tuletada vastav valem.Kui
F(jõud) on
konstantne, siis avaldub töö valemiga
A
= F(b
−
a)Kui
F ei
ole konstantne, siis tuleb töö arvutamisel kasutada integreerimist.
Idee on järgmine: jaotame vaadeldava lõigu [
a,
b] väikesteks
osalõikudeks nii, et igal osalõigul on jõud ligikaudselt
konstantne. Igal osalõigul arvutame töö eraldi, kasutades selleks
ülaltoodud valemit. Seejärel liidame osalõikudel tehtud tööd
kokku
saades töö tervel lõigul [
a,
b]. Niiviisi saame
ligikaudse töö valemi.
Jaotame
lõigu [
a, b]
n osalõiguks
punktidega
x0
,
x1
,
x2
,
. . . , xn,
kusjuures
a
= x0
1
2
n
= b
Tähistame
järjekorras i-nda
osalõigu pikkuse sümboliga Δxi
, st Δxi
= xi−xi−1.
Valime
igal osalõigul [xi−1,
xi]
ühe punkti pi
iga
Summeerides
tööd üle osalõikude saame töö ligikaudse avaldise kogu lõigul
[a, b]
Valemi
(5.17) paremal poolel seisab funktsiooni F
integraalsumma
lõigul [a, b].
Integraalsumma läheneb määratud integraalile protsessis ϱn
→ 0.
Seega saame ligikaudsest valemist (5.17) piirprotsessis ϱn
→ 0
järgmise täpse valemi töö jaoks:
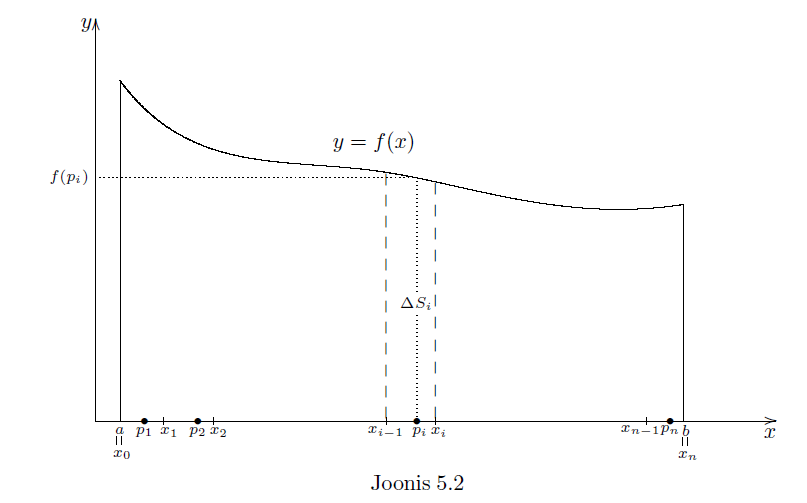
38.
Määratud integraali
geomeetriline sisu.
Olgu
funktsioon f pidev
lõigul [a, b].
Eeldame, et f(x)
≥ 0.
Vaatleme joontega
y
= f(x),
x = a,
x = b
ja y
= 0 piiratud
kõvertrapetsit (joonisel 5.2 on see
ümbritsetud
pideva joonega ).
Tähistame
selle kujundi pindala sümboliga S. Meie eesmärk on tuletada valem
pindala
S jaoks. Selleks jaotame lõigu [a, b] n osalõiguks punktidega x0,
x1, x2, . . .
.
. . , xn, kusjuures
a
= x0
Fikseerime
igal osalõigul [xi−1, xi] ühe punkti pi. Tähistame
Δxi
= xi − xi−1 .
Vaatleme
osalõigule [xi−1, xi] toetuvat kõvertrapetsi osa ΔSi (joonisel
5.2 on
selle
küljed tõmmatud katkendliku joonega). Kui Δxi on väike, siis
muutub
pidev
funktsioon f osalõigul [xi−1, xi] vähe. Seega võib ta sellel
osalõigul lugeda
ligikaudselt
võrdseks konstandiga
f(pi) ehk f(x) ≈ f(pi) kui x ∈
[xi−1, xi] . (5.18)
Järelikult
on ΔSi ligikaudselt ristkülik ja tema pindala avaldub ligikaudu
kõrguse
ja
aluse korrutisena ΔSi ≈ f(pi)Δxi .
Terve
kõvertrapetsi ligikaudse pindala valemi saame, kui summeerime
osapiirkondade pindalad :
f(pi)Δxi
. (5.19)
Märgime,
et saadud valemi paremal poolel seisab aluseid Δxi ja kõrgusi f(pi)
omavate ristkülikute ühendi (vt joonis 5.3) pindala.
Mida
väiksem on Δxi, seda vähem muutub funktsioon f osalõigu [xi−1,
xi]
peal,
järelikult seda täpsem on valem (5.18). Seega, mida peenem on [a,
b]
tükeldus,
seda täpsem on ka pindala valem (5.19). Teisest küljest, valemi
(5.19)
paremal
poolel on funktsiooni f integraalsumma lõigul [a, b]. Järelikult,
kui
pikima
osalõigu pikkus ϱn läheneb nullile, siis läheneb nimetatud
integraalsumma
määratud
integraalile
Kokkuvõttes, piirporotsessis ϱn → 0
saame
ligikaudsest valemist (5.19) järgmise täpse valemi pindala jaoks:
(5.20)
Lõpuks
tuleme veel tagasi valemi (5.19) juurde. Nagu nägime, seisab selle
paremal
poolel joonisel 5.3 kujutatud ristkülikute ühendi pindala. Valemit
(5.19)
saab kasutada määratud integraali
ligikaudseks arvutamiseks.
Oma
geomeetrilise sisu tõttu nimetatakse seda valemit ristkülikvalemiks.
39.
Määratud integraali omadused (sh omadused 3 – 6 koos
põhjendustega).
Integraali
keskväärtusteoreem koos tõestusega
1.∫
ba [f(x)
± g(x)]dx
=∫
ba f(x)dx
±∫
ba g(x)dx.
NB!
Omadus 1 ei kehti korrutamise ja jagamise korral! See tähendab, et
∫ ba[f(x)g(x)]dx
̸=∫
baf(x)dx
·∫
bag(x)dx
ja
∫ ba[f(x)
: g(x)]dx
̸=∫
baf(x)dx
:∫g(x)dx:
2.
∫ ba
Cf(x)dx
= C∫
ba f(x)dx,
C -
konstant.
3.
∫ aa
f(x)dx
= 0,
Põhjendus:
kui a =
b,
siis on läbitud teepikkus võrdne nulliga, seega on
ka
töö võrdne nulliga, st ∫
aa F(x)
= 0.
4.
Kui
a > b,
siis ∫ ba
f(x)dx
= −∫
ab f(x)dx.
Põhjendus.
∫ Jõu
F(x)
poolt tehtud töö liikumisel punktist a
punkti b
on ba
F(x)dx
ning töö
liikumisel punktist b
punkti a
on
∫ ab
F(x)dx.
Seega,kui materiaalne objekt liigub punktist a
punkti b
ja sealt tagasi
punkti a,on
kogu tehtud töö võrdne summaga
∫ ba
F(x)dx
+∫
ab F(x)dx.
Kuid kunasel juhul on kogu läbitud teepikkus võrdne nulliga, kehtib
võrdus∫ baF(x)dx
+∫
abF(x)dx
= 0.
5.
∫ ca
f(x)dx
=∫
ba f(x)dx
+∫
cb f(x)dx.
Põhjendus.
Jõu F(x)
poolt tehtud tööd liikumisel punktist a
punkti b
ning punktist b
punkti c
on vastavalt
∫ ba
F(x)dx
ning
∫ cb
F(x)dx.
Seega, kui
objekt liigub punktist a
üle punkti b
punkti c,
on jõu poolt tehtudkogutöö võrdne summaga
∫ baF(x)dx
+∫
cbF(x)dx.
6.
Kui
a ≤
b ja
f1(x)
≤ f2(x)
iga x ∈
[a,
b] korral, siis ∫
ba f1(x)dx
≤∫
ba f2(x)dx.
Põhjendus.
Jõufunktsioonide F1(x)
ja F2(x)
poolt tehtud tööd liikumisel punktist a
punkti b
on vastavalt ∫
ba F1(x)dx
ja ∫
ba F2(x)dx.
Kui F1(x)
≤
F2(x)
ja läbitud teepikkus on positiivne, st b
> a, siis on jõu
F2
poolt
tehtud
töö suurem või võrdne jõu F1
poolt tehtud tööst, st ∫
ba
F1(x)dx
≤
∫ ba
F2(x)dx.
Integraali
keskväärtusteoreem koos tõestusega.
Kui
f(x)
on pidev lõigul [a,
b],
siis leidub sellel lõigul vähemalt üks punkt c nii, et
∫ ba
f(x)dx
= f(c)
∫ badx
= f(c)
(b −
a)
.
Tõestus.
Kuna f(x)
on pidev lõigul [a,
b], saavutab ta sellel
lõigul oma suurima
ja
vähima väärtuse .Olgu M
suurim väärtus ja m
vähim väärtus. Siis
kehtivad iga x ∈
[a,
b] korral võrratused
m ≤ f(x)
≤ M.
Määratud integraali omaduse 6 põhjal
∫ ba
mdx ≤∫
baf(x)
dx ≤∫
ba
M dx.
Kuna
m ja
M on
konstandid, siis omaduse 2 põhjal ∫
ba
mdx = m
∫ ba
dx ja ∫
ba
M dx = M∫
ba
dx.
Seega
m∫
badx
≤ ∫
ba
f(x)dx
≤ M
∫badx.
Jagades
suurusega ∫ba
dx saame m
≤ ∫ba
f(x)dx∫ba
dx ≤
M.
Näeme,
et arv ∫ ba
f(x)dx
∫ ba
dx paikneb funktsiooni
f(x)
suurima ja vähima väärtuse
vahel.
Kuna lõigul [a, b]
pidev funktsioon f(x)
saavutab sellel lõigul iga väärtuse
oma
suurima ja vähima väärtuse vahel, siis leidub vähemalt üks punkt
c ∈
[a,
b] nii, et
f(c)
=∫ ba
f(x)dx∫
ba dx
Korrutades
seda võrdust arvuga ∫
ba
dx ja arvestades, et ∫
ba
dx = b
− a,
saame valemi. Teoreem on tõestatud.
40.
Teoreem muutuva ülemise rajaga integraalist koos tõestusega.
Newton -
Leibnitzi
valem. Valemi
tõestus.
Teoreem
muutuva ülemise rajaga integraalist koos tõestusega.
Teoreem
5.3. Kui f on pidev
lõigul [a,
b],
siis funktsioon Φ,
mis avaldub valemiga
Φ(x)
= ∫
xa
f(t)dt,
on funktsiooni f algfunktsioon lõigul [a,
b].
Tõestus.
Teoreemi väite tõestamiseks peame näitama, et Φ (x)
= f(x)
iga x ∈
[a,
b] korral.
Olgu
x suvaline
punkt lõigult [a, b].
Nagu tavaliselt, tähistame sümboliga Δx
argumendi x
muutu. Kasutades
määratud integraali omadust 3 §5.7
arvutame:
Φ(x
+ Δx)
=∫ x+Δx
a
f(t)dt
= ∫
x
a
f(t)dt
+ ∫
x+Δx
x
f(t)dt
= Φ(x)
+ ∫ x+Δx
x
f(t)dt
.
Seega
saame funktsiooni Φ muudu jaoks seose ΔΦ = Φ(x
+ Δx)
− Φ(x)
= ∫ x+Δx
x
f(t)dt
. (5.22)
Integraali
keskväärtusteoreemi põhjal leidub punktide x
ja x
+Δx
vahel punkt c
nii, et kehtib võrdus
∫ x+Δx
x
f(t)dt
= f(c)(x
+ Δx
− x)
= f(c)Δx
. (5.23)
Täpsemalt:
Kui Δx > 0,
siis leidub integraali keskväärtusteoreemi põhjal lõigul [x;
x + Δx]
punkt
c nii,
et kehtib (5.23). Kui aga Δx
punkt
c nii,
et kehtib ∫ x+Δx
x
f(t)dt
= −
∫ x
x+Δx
f(t)dt
= −f(c)(x
− x
− Δx)
= f(c)Δx;
st samuti kehtib (5.23).
Võttes
(5.22) ja (5.23) kokku saame seose ΔΦ = f(c)Δx,
millest järeldub et ΔΦ/ Δx
= f(c)
.
Selle
võrduse vasakul pool olev jagatis koondub funktsiooni Φ tuletiseks
punktis x
piirprotsessis Δx
→ 0.
Peale selle, kuna c
paikneb x
ja x
+ Δx
vahel, siis c
→ x,
kui Δx →
0. Kokkuvõttes
saame võrduse Φ′(x)
= lim Δx→0
ΔΦ/Δx=
lim c→x
f(c)
= f(x)
.
Olemegi
tõestanud, et Φ′(x)
= f(x)
iga x ∈
[a,
b] korral ja
sellega ka teoreemi väite.
Newton -Leibnitzi
valem. Valemi
tõestus.
Teoreem
5.4 Kui F on pideva
funktsiooni f algfunktsioon lõigul [a,
b],
siis kehtib valem
∫ba
f(x)dx
= F(b)
− F(a)
=: F(x)|ba
Tõestus.
Teoreemi eelduse
kohaselt on F
funktsiooni f
algfunktsioon lõigul
[a, b].
Peale selle, teoreem 5.3 põhjal on ka funktsioon Φ(x)
= ∫ x
a f(t)dt
funktsiooni f
algfunktsioon lõigul
[a, b].
Kuna ühe ja sama funktsiooni kaks algfunktsiooni võivad
teineteisest erineda vaid liidetava konstandi võrra (teoreem 5.1),
siis kehtib seos ∫ x
a
f(t)dt
= F(x)
+ C . (5.25)
Järgnevalt
leiame konstandi C
väärtuse. Selleks
paneme avaldises (5.25) muutuja x
võrduma a-ga.
Saame võrduse∫
aaf(t)dt
= F(a)
+ C ,
mille vasak pool võrdub nulliga määratud integraali omaduse 1
põhjal. Seega, 0 = F(a)
+ C,
millest tuletame valemi C
= −F(a)
konstandi C jaoks.
Nüüd
saame kirjutada võrduse (5.25) kujul ∫
x
af(t)dt
= F(x)
− F(a)
.
Pannes
selles avaldises muutuja x
võrduma arvuga b,
jõuamegi Newton-Leibnitzi
valemini
(5.24). Teoreem on tõestatud.
41. Kirjeldada
asendusvõtet määratud integraali arvutamisel. Tuletada ositi
integreerimise
valem määratud integraali jaoks.
Ositi
integreerimise valem määratud integraali jaoks
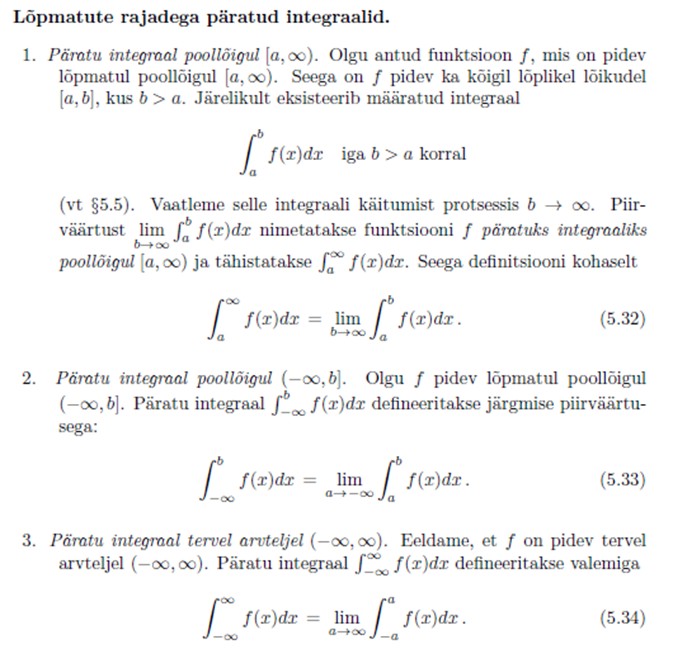
42. Defineerida
lõpmatute rajadega päratud integraalid. Sõnastada päratute
integraalide
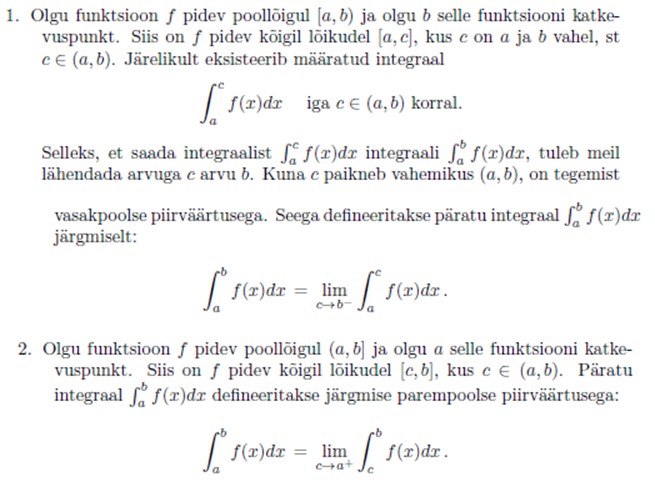
hindamisteoreemid. Defineerida päratud integraalid katkevatest
funktsioonidest.
Hindamisteoreemid
Päratud
integraalid katkevatest funktsioonidest
43.
Tuletada joonte y=f1(x)
ja y=f2(x)
vahel asuva
kujundi pindala valem.
Pindala
arvutamine. Kõvertrapetsi
pindala avaldub valemiga.
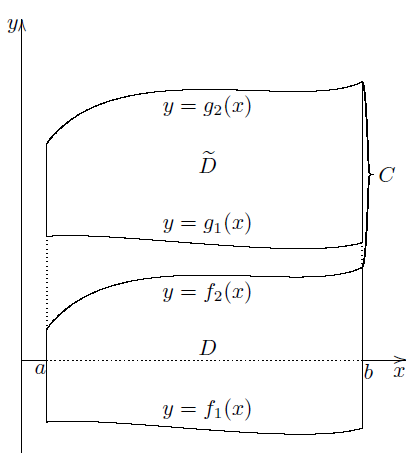
Vaatleme
tasandilist kujundit D,
mis on alt piiratud joonega y
= f1(x)
ja ülalt joonega y
= f2(x),
kusjuures a ≤
x ≤
b.
Meid huvitab D
pindala S.
Näitame, et S saab
esitada
f2
ja f1
vahe integraalina, st
Valemi
tõestamiseks nihutame D
ülespoole x-telge.
Selleks leiame sellise positiivse arvu C,
mille korral kehtib võrratus f1(x)
+ C ≥
0 ja defineerime
funktsioonid
ning +C
Olgu
joonte y
= g1(x)
ja y =
g2(x)
vahel paiknev kujund. Tänu C
sobivale valikule
asetseb kujund
x-telje peal.
Märgime, et juhul kui D
asetseb juba
x-telje
peal, siis ei ole taolist nihutamise operatsiooni vaja teha, st
võtame C =
0 ja
= D.
Kujundite D ja
pindalad
on võrdsed. Järelikult tuleb S
leidmiseks arvutada
pindala. Kuna jooned y
= g1(x)
ja y =
g2(x)
asetsevad ülalpool x-telge,
siis võib kujundi
pindala arvutada
selliselt, et lahutame joone y
= g2(x)
ja x-telje
vahele jääva kõvertrapetsi pindalast joone
y
= g1(x)
ja x-telje
vahele jääva kõvertrapetsi pindala. Kuna valemi
põhjal võrdub y =
g2(x)
ja x-telje
vahele jääva kõvertrapetsi pindala integraaliga
ning y =
g1(x)
ja x-telje
vahele jääva kõvertrapetsi pindala integraaliga ,
siis
Lõpuks arvutame
Olemegi
tõestanud valemi.
44.
Tõestada keha ruumala valem ristlõigete pindalade kaudu ja tuletada
sellest pöördkeha ruumala valem
Olgu
antud ruumiline keha V
, mis paikneb
tasandite x =
a ja
x =
b vahel.
Tähistame selle keha ruumala samuti V
-ga. Tuletame
valemi V
arvutamiseks.
Tekkiva
ristlõike pindala sõltub lõiketasandi asukohast, seega on ta
muutuja x
funktsioon.
Tähistame ristlõike pindala S
(x)
-ga. Eeldame, et S
(x)
on pidev.
Tükeldame
lõigu [a, b]
osalõikudeks punktidega
a
=
=
b.
Valime
igal osalõigul [,
]
ühe punkti .
Tähistame
Δ
=
-
Vaatleme
tasandite x =
ja x =
vahele
jäävat keha kihti Δ.
Kui Δ
on
väike, siis muutub ristlõike pindala S
(x)
osalõigul [,
]
vähe ja
me
saame ta lugeda ligikaudselt võrdseks S
()-ga,
st
S
(x)
≈ S ()
kui x ∈
[,
].
Sellisel
juhul on Δ
ligikaudselt
silinder, mille põhja pindala ja kõrgus on vastavalt S
()
ja Δ.
Seega avaldub Δ
ruumala
ligikaudselt valemiga
Terve
keha ruumala ligikaudse valemi saame summeerides
ruumalad:
Mida
peenem on lõigu [a,
b] jaotus, seda
täpsem on ligikaudne võrdus Δ
≈ S ()Δ
ning seda täpsem
on ka terve keha ruumala valem. Teisest küljest: valemi paremal
poolel seisab funktsiooni S
integraalsumma
lõigul [a, b].
Järelikult
saame
pikima osalõigu pikkuse
lähenemisel
nullile järgmise täpse valemi keha
ruumala
jaoks ristlõigete pindalade järgi:
Pöördkeha
ruumala
Olgu
antud funktsioon f lõigul [a,
b]. Eeldame, et f
(x)
on pidev ja f (x)
≥ 0.
Vaatleme joontega y
= f
(x),
x = a,
x = b
ja y
= 0 piiratud
kõvertrapetsit K.
Paneme kujundi K
pöörlema ümber
x-telje.
Tulemusena saame pöördkeha V.
Keha V
lõikamisel x-teljega
ristuva tasandiga tekkiv lõige on ring, mille raadius võrdub f
(x)-ga
(sest kujundi K
kõrgus punktis x
on f
(x)).
Seega on ristlõike pindala
ja üldisest keha ruumala valemist saame järgmise valemi V
ruumala jaoks:
45.
Tuletada joone pikkuse valem
Olgu
antud joon võrrandiga y
= f
(x),
kus a ≤ x ≤ b.
Tähistame selle joone pikkuse l-ga.
Meid huvitab valem l
arvutamiseks.
Eeldame, et f (x)
on diferentseeruv. Jaotame lõigu [a,
b] osalõikudeks
punktidega
Tähistame
=,
.
Vaatleme
osalõigu []
kohale jäävat joone osakaart Δ.
Kuna
f (x)
on eelduse kohaselt diferentseeruv, on vaadeldav joon sile. Sile joon
on aga sirgestuv (st suurendamisel muutub ”sirgemaks”).
Järelikult on väikese
korral osakaar
ligikaudselt
sirglõik.
pikkuse arvutamisel
võib kasutada Pythagorase teoreemi. Tähistades
pikkuse samuti -ga
saame
Edasi
avaldame selles valemis esineva funktsiooni muudu
argumendi muudu
kaudu.
Selleks sobib kasutada Lagrange’i teoreemi. Nimetatud teoreemi
põhjal leidub vahemikus ()
punkti nii, et kehtib
võrdus
f
()
– f ()
= f ’ ()( − )
.
Seega
Δ = f
′ ()Δ
ja
valemit saab teisendada järgmiselt:
Terve
joone ligikaudse pikkuse saame kui summeerime
ligikaudsed
pikkused:
Mida
väiksem on ,
seda ” sirgem ” on osakaar
ja järelikult on seda
täpsem ka ligikaudne võrdus. Sellest tuleneb, et mida väiksemad on
osalõigud, seda täpsem on valem. Teisest küljest, valemi paremal
poolel seisab funktsiooni
integraalsumma lõigul
[a, b].
Järelikult pikima osalõigu pikkuse
lähenemisel nullile
saame järgmise täpse valemi vaadeldava joone pikkuse jaoks:









































Kõik kommentaarid