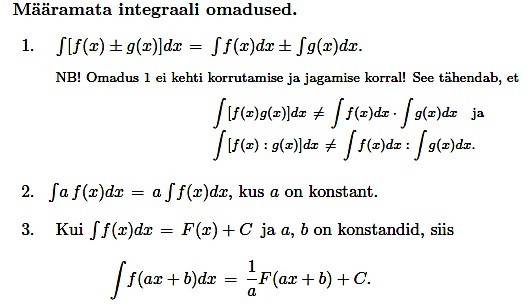
20.
Esitada funktsiooni muut diferentsiaali ja jääkliikme summana.
Kuidaskäituvad diferentsiaal ja jääkliige argumendi muudu Δx suhtes, kui Δx
läheneb nullile ?
Tõestada ei ole vaja.Funktsiooni
muudu peaosa ja jääkliige. Olgu antud funktsioon, mis on
diferentseeruv punktis a. Eeldame, et f′(a)≠0.
Valemist näeme, et funktsiooni muut Δy koosneb kahest liidetavast, millest
esimene on diferentsiaal dy = f′(a)Δx ja teine on β.
Mõlemad
liidetavad on lõpmatult
kahanevad protsessis Δx → 0.
Näeme,
et esimene liidetav, so diferentsiaal dy on sama järku lõpmatult
kahanev suurus kui Δx ja teine liidetav β on kõrgemat järku
lõpmatult kahanev suurus Δx suhtes. Järelikult väikese Δx korral
hakkab diferentsiaal funktsiooni muudu avaldises domineerima.
Seetõttu võime lugeda diferentsiaali dy funktsiooni muudu peaosaks.
Jääkliikme β võib väikese Δx korral funktsiooni muudu avaldises
ära jätta. Kehtib
ligikaudne valem
Δy
≈ dy kui Δx ≈ 0 .
21.
FUNKTSIOONI
LOKAALSETE EKSTREEMUMITE DEFINITSIOONID . Sõnastada Fermat ’ lemma Öeldakse,
et funktsioonil f on punktis x1
lokaalne maksimum, kui
1.
funktsioon f on määratud punkti x1
mingis ümbruses (x1
− ϵ, x1
+ ϵ);
2.
iga x ∈
(x1
− ϵ, x1
+ ϵ) korral kehtib võrratus f(x) ≤ f(x1).
Öeldakse,
et funktsioonil f on punktis x1
lokaalne miinimum, kui
1.
funktsioon f on määratud punkti x1
mingis ümbruses (x1
− ϵ, x1
+ ϵ);
2.
iga x ∈
(x1
− ϵ, x1
+ ϵ) korral kehtib võrratus f(x) ≥ f(x1).
Funktsiooni
lokaalseid maksimume ja miinimume nimetatakse selle funktsiooni
lokaalseteks
ekstreemumiteks.
Fermat'
lemma - Kui
funktsioonil f on punktis x1
lokaalne ekstreemum ja funktsioon on diferentseeruv selles punktis,
siis f′(x1) = 0.
22.
Sõnastada Rolle’i teoreem (tõestust ei küsi). Rolle’i
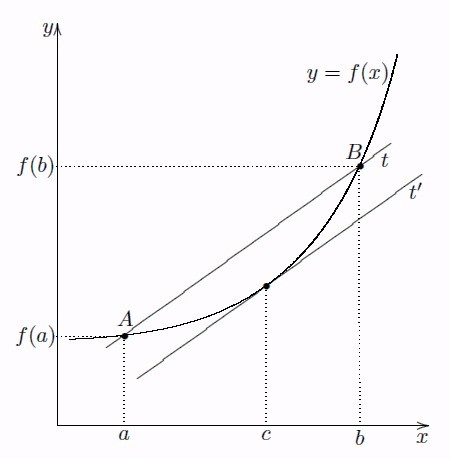
teoreemi geomeetriline sisu. Sõnastada Lagrange ’i teoreem
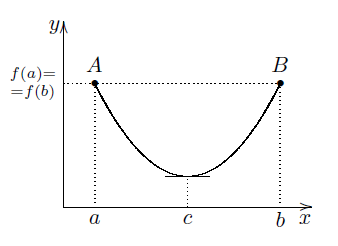
(tõestust ei küsi). Lagrange’i teoreemi geomeetriline sisu.Rolle'i
teoreem. Kui
funktsioon f on lõigul [
a,
b]
pidev,
vahemikus (
a,
b)
diferentseeruv
ja rahuldab tingimust f(
a)
=
f(
b)
,
siis leidub vahemikus (
a,
b)
vähemalt
üks punkt c nii, et
f′(
c)
= 0
.Geomeetriline
sisu. See on
järgmine. Nimelt teoreemi eeldustel on funktsiooni
y
=
f(
x)
graafik sile joon, mille otspunktid
A
= (
a,
f(
a))
ja
B =
(
b, f(
b))
asuvad
x-telje
suhtes samal kõrgusel. Teoreem väidab, et sellisel juhul leidub
vahemikus (
a, b)
vähemalt üks punkt
c,
mille korral funktsiooni
tuletis on null, st funktsiooni graafiku
puutuja on paralleelne
x- teljega .
Lagrange'i
teoreem –
Kui
funktsioon f on lõigul [
a,
b]
pidev
ja vahemikus (
a,
b)
diferentseeruv,
siis leidub vahemikus (
a,
b)
vähemalt
üks punkt c nii, etLagrange’i
teoreemi geomeetrilist sisu vaatleme jooniselt. Punktidest
A
= (
a,
f(
a))
ja
B =
(
b, f(
b))
läbi tõmmatud lõikaja
t
tõus võrdub
suhtega
Viime
paralleellükkega sirge
t
uude asendisse nii,
et saadud uus sirge
t′
oleks joone
y
=
f(
x)
puutuja. Tähistame puutepunkti
x-koordinaadi
c-ga.
Kuna funktsiooni graafiku puutuja tõus võrdub funktsiooni
tuletisega vaadeldavas punktis, siis sirge
t′
tõus on
f′(
c).
Kuna
sirged t ja
t′
on paralleelsed,
siis on nende tõusud omavahel võrdsed, seega
Korrutades
b −
a-ga
saame valemi .
Kokkuvõttes:
Lagrange’i teoreem väidab, et sileda joone lõikaja saab
paralleellükkega viia selle joone puutujaks.
23.
Kõrgemat järku tuletiste ja diferentsiaalide definitsioonid
(kõrgemat järkudiferentsiaalide
valemeid ei küsi).Olgu
funktsioon y = f(x) diferentseeruv hulgas D. Siis on tema tuletis f′
hulgas D määratud funktsioon. Oletame, et f′ on samuti
diferentseeruv hulgas D. Siis saame me arvutada funktsiooni f′
tuletise ehk funktsiooni f teise tuletise, mida tähistatakse f′′.
Seda protseduuri võib jätkata. Funktsiooni f teise tuletise
diferentseerimisel saame selle funktsiooni kolmanda tuletise f′′′
jne.
Funktsiooni
y = f(x) n-järku tuletiseks nimetatakse selle funktsiooni n – 1 -
järku tuletise tuletist ja tähistatakse f(n). Lõplikku n-järku
tuletist omavat funktsiooni nimetatakse n-korda diferentseeruvaks.
Kui
funktsioonil on olemas kõik
tuletised f(n), kus n = 1, 2, 3, . . .,
ja neil on lõplikud väärtused, siis nimetatakse seda funktsiooni
lõpmata arv
kordi diferentseeruvaks.
Kõrgemat
järku
diferentsiaalid .
dy(x)
= f’(x)dx
d2y(x)
= f'' (x)dx2d3y(x)=f'''
(x)dx3Funktsiooni
y = f(x) n-järku diferentsiaaliks nimetatakse selle funktsiooni n −
1 - järku diferentsiaali diferentsiaali ja tähistatakse
dny
. Kehtib valem
dn
y(x)=f(n)(x)
dxn24.
Funktsiooni Taylori polü noomi valem (tuletada pole vaja). Millal
nimetatakse Taylori polünoomi McLaurini polünoomiks?Kui
a = 0, siis nimetatakse Taylori polünoomi ka McLaurini polünoomiks.
Seega on funktsiooni f(x) McLaurini polünoom järgmine:
25.
FUNKTSIOONI KASVAMISE JA KAHANEMISE SEOS TULETISE MÄRGIGA (SÕNASTADA
VASTAV TEOREEM, TÕESTUST EI KÜSI)Teoreem
: Olgu funktsioon f diferentseeruv vahemikus (a, b). Siis kehtivad
järgmised väited:
1.
Kui f′(x) > 0 iga x ∈
(a, b) korral, siis f on kasvav vahemikus (a, b).
2.
Kui f′(x)
26.
FUNKTSIOONI KRIITILISE PUNKTI DEFINITSIOON. LOKAALSE EKSTREEMUMI
TARVILIK TINGIMUS. FUNKTSIOONI LOKAALSETE EKSTREEMUMITE PIISAVAD
TINGIMUSEDFunktsiooni
kriitilisteks punktideks
(ehk esimest järku kriitilisteks punktideks) nimetatakse
funktsiooni argumendi väärtusi, mille korral tuletis võrdub
nulliga või lõplik tuletis puudub.
Teoreem:
Lokaalse ekstreemumi
tarvilik tingimus.
Kui funktsioonil f on punktis x1
lokaalne ekstreemum, siis on x1
selle funktsiooni kriitiline punkt.
Siinkohal
tuleb rõhutada seda, et teoreemile
vastupidine väide ei kehti. See
tähendab, et igas
kriitilises punktis ei tarvitse ekstreemumit olla
ehk funktsioonil võib olla selliseid kriitilisi punkte, kus
ekstreemumit ei ole.
Teoreem:
Lokaalse ekstreemumi piisav tingimus I.
Olgu x1
funktsiooni f kriitiline punkt.
1)
Kui läbides punkti x1
vasakult paremale funktsiooni tuletise märk muutub plussist
miinuseks, siis on funktsioonil selles punktis lokaalne maksimum.
2)
Kui aga läbides punkti x1
vasakult paremale funktsiooni tuletise märk muutub miinusest
plussiks, siis on funktsioonil selles punktis lokaalne miinimum.
Teoreem:
Lokaalse ekstreemumi piisav tingimus II.
Olgu funktsiooni f kriitiline punkt x1
selline, et f′(x1)
= 0.
1)Kui
f′′(x1)
2)Kui
aga f′′(x1)
> 0, siis on funktsioonil f punktis x1
lokaalne miinimum.
27.
NÕGUSA JA KUMERA JOONE DEFINITSIOONID. NÕGUSUSE JA KUMERUSE SEOS
TEIST JÄRKU TULETISE MÄRGIGA. Joone käänupunkti definitsioon.
Käänupunkti tarvilik tingimus. Käänupunkti piisav tingimus.Öeldakse,
et joon
y =
f(
x)
on
nõgus,
kui liikudes vasakult paremale selle joone puutuja tõus suureneb.
Öeldakse, et joon
y
=
f(
x)
on
kumer,
kui liikudes vasakult paremale selle joone puutuja tõus väheneb.
Teoreem:
Olgu funktsioon f
kaks korda diferentseeruv vahemikus (a,
b).
Siis kehtivad järgmised väited
:1.
Kui f′′(x)
> 0
iga x ∈
(a,
b) korral,
siis on joon y = f(x)
nõgus vahemikus (a,
b).
2.
Kui f′′(x)
Joone
käänupunktid. Punkti,
mis eraldab pideva joone kumerat osa nõgusast, nimetatakse selle
joone
käänupunktiks.Käänupunkti
tarvilik tingimus koos põhjendusega. Teoreem:
Käänupunkti
tarvilik tingimus.
Kui P =
(x1,
f(x1))
on joone y =
f(x)
käänupunkt, siis x1
on funktsiooni f teist
järku kriitiline punkt.
Käänupunkti
piisav tingimus koos põhjendusega. Teoreem:
Käänupunkti piisav tingimus. Olgu
x1
funktsiooni f teist
järku kriitiline punkt. Kui läbides seda punkti funktsiooni teine
tuletis muudab. märki, siis on P =
(x1,
f(x1))
joone y =
f(x)
käänupunkt.
28.
Joone asümptoodi definitsioon. Vertikaalasümptoot. Millistel
tingimustel on sirge x = a joone y = f (x) vertikaalasümptoot?
Kaldasümptoot ja horisontaalasümptoot. Valemid kaldasümptoodi
võrrandi kordajate jaoks piirprotsessis x →∞Vaatleme
tasandil
xy -
teljestikus joont
y
=
f(
x).
Sirget
l nimetatakse
joone
y =
f(
x)
asümptoodiks,
kui joone
y
=
f(
x)
jooksva punkti eemaldumisel lõpmatusse selle punkti kaugus sirgest
l
läheneb nullile.
Vertikaalasümptoodid.
Need on
y-teljega
paralleelsed sirged. Asümptoodi võrrand on
x
=
a.
Sirge
x =
a
on joone y =
f(
x)
asümptoodiks siis
ja ainult siis, kui kehtib vähemalt üks järgmistest
piirväärtustest:lim
f (x) =
−∞ lim
f (x)= ∞x→a−
x→a−
lim
f(x)
= −∞ lim
f(x) =∞x→a+ x
→a+
Kaldasümptoot
ja horisontaalasümptoot.Kaldasümptoodid.
Need on sirged, mis ei ole paralleelsed
y-teljega.
Asümptoodi võrrand on y=
kx
+
b,
kus
k on
asümptoodi tõus. Kaldasümptoodi erijuht on
horisontaalasümptoot,
mis on paralleelne
x-teljega.
Tõus
k on
sellisel juhul võrdne nulliga, st asümptoodi võrrand on
y
=
b.
29.
ALGFUNKTSIOONI DEFINITSIOON. Sõnastada teoreem algfunktsioonide
üldavaldise kohta (tõestust ei küsi). FUNKTSIOONI MÄÄRAMATA INTEGRAAL ja selle geomeetriline sisu.Funktsiooni
F nimetatakse
funktsiooni
f
algfunktsiooniks hulgas
D,
kui iga
x kuulub
D korral
kehtib võrdus
F
′(
x)
=
f(
x).
Teoreem
Kui F on
funktsiooni f algfunktsioon hulgas D, siis kõik funktsiooni f
algfunktsioonid hulgas D avalduvad kujul F +
C, kus C on suvaline konstant.Määramata
integraali mõiste. Funktsiooni
f algfunktsioonide
üldavaldist
F(
x)+
C,
kus
C
on konstant,
nimetatakse funktsiooni
f
määramata integraaliks ja
tähistatakse ∫
f(
x)
dx.
Seega definitsiooni kohaselt ∫
f(
x)
dx
=
F(
x)
+
C , C −
konstant
.
Algfunktsiooni
leidmist nimetatakse integreerimiseks.
Geomeetriline
sisuMääramata
integraal ei ole ühene funktsioon. Iga x korral on tal lõpmatult
palju erinevaid väärtusi, mis sõltuvad valitud konstandist C.
Määramata integraali võib ka tõlgendada kui üheste funtksioonide
parve y = F(x) + C, kus konstandi C igale väärtusele vastab üks
ühene funktsioon. Kujutades seda funktsioonide parve graafiliselt
tasandil xy-koordinaadistikus saame joonteparve, millel jooned on
üksteisest tuletatavad y-telje sihilise paralleellükke abil.
30.
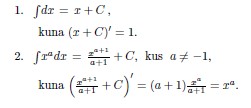
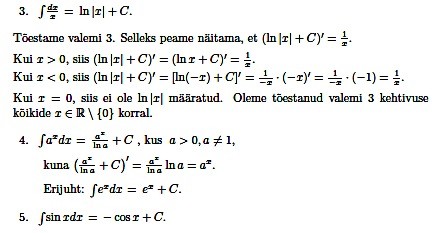
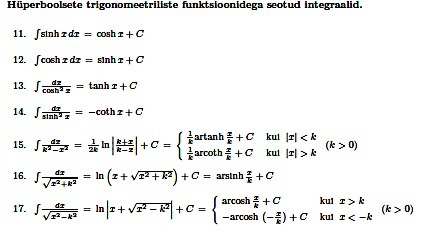
Integraalide tabel31.
Kirjeldada asendusvõtet määramata integraali avaldamisel. Esitada ositi integreerimise valem määramata integraali jaoksVaatleme
määramata integraali
(5.2)Integraali
(5.2) avaldamisel asendusvõottega tehakse selle integraali all
muutuja vahetus. Selleks valitakse mingi funktsioon
u
= φ(x)
ja
integreerimine muutuja
x
järgi asendatakse
integreerimisega muutuja
u
järgi.
Eeldame,
et
φ on
üksühene ja diferentseeruv. Tähistame funktsiooni
φ
pöördfunktsiooni
ψ-ga.
Seega
x
= ψ(u) (5.3)
Paneme kirja funktsiooni
ψ
tuletise
diferentsiaalide jagatisena:
Korrutades
seda võrdust du-ga saame
dx =
ψ’(u)du (5.4)
Kasutades
valemeid (5.3) ja (5.4) asendame x ja dx
integraali (5.2)
all. Saame avaldise
Ositi
integreerimine.
Avaldis kannab ositi integreerimise valemi nime.32.
Funktsiooni integraalsumma ja määratud integraali mõisted.Integraalsumma
mõiste.Olgu
antud funktsioon
f,
mis on pidev
lõigul
[
a, b].
Jaotame lõigu [
a,
b]
n
osalõiguks
punktidega
x0
,
x1
,
x2
,
. . . , xn,
kusjuures a =
x0
1
2
n
= b.
Tähistame
järjekorras i-nda
osalõigu pikkuse sümboliga Δxi
, st
Valime
igal osalõigul [xi−1,
xi]
ühe punkti pi.
Moodustame summa:
Seda summat nimetatakse funktsiooni f
integraalsummaks lõigul
[a, b].
Määratud
integraali mõiste.
Tähistame pikima osalõigu pikkuse sümboliga ϱn,
st ϱn
= max<.
Muudame lõigu [a,
b] tükeldust
järjest peenemaks selliselt , et pikima osalõigu pikkus ϱn
läheneb nullile.
Kui f on
pidev lõigul [a,
b], siis on
integraalsummal Sn
taolises
piirprotsessis lõplik piirväärtus.
Seda
piirväärtust nimetatakse funktsiooni f
määratud integraaliks lõigul
[a, b]
ja tähistatakse
Seega
definitsiooni kohaselt
Integraali
osad kannavad
järgmisi nimetusi: a – integraali alumine raja, b – integraali
ülemine raja, [a,b] – integreerimislõik, x –
integreerimismuutuja, f – integreeritav funktsioon, f(x)dx –
integraalialune avaldis.
33.
Töö arvutamine sirgjoonelisel liikumisel muutuvas jõuväljas.
Tuletada vastav valem.
Kui F(jõud) on konstantne , siis avaldub töö valemiga A
= F(b
−
a).
Kui
F ei
ole konstantne, siis tuleb töö arvutamisel kasutada integreerimist.
Idee on järgmine: jaotame vaadeldava lõigu [a,
b] väikesteks
osalõikudeks nii, et igal osalõigul on jõud ligikaudselt
konstantne. Igal osalõigul arvutame töö eraldi, kasutades selleks
ülaltoodud valemit. Seejärel liidame osalõikudel tehtud tööd
kokku saades töö tervel lõigul [a,
b]. Niiviisi saame
ligikaudse töö valemi.
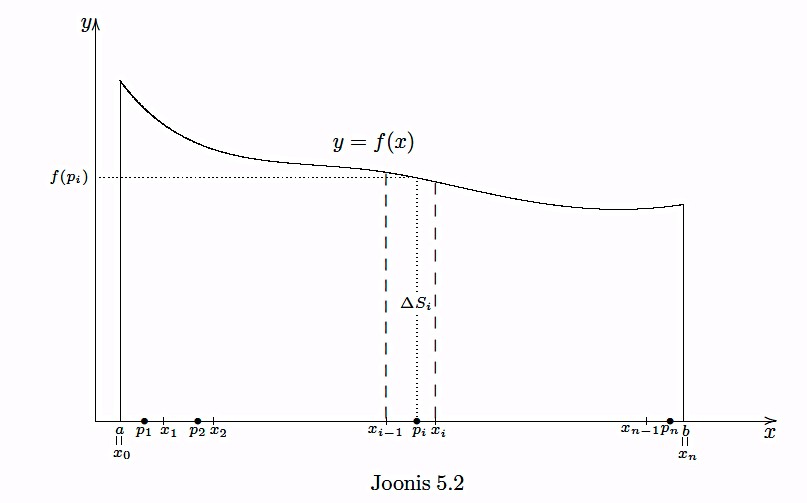
34.
Määratud integraali
geomeetriline sisu: kõvertrapetsi pindala leidmine.
Olgu
funktsioon f pidev
lõigul [a, b].
Eeldame, et f(x)
≥ 0.
Vaatleme joontega y
= f(x),
x = a,
x = b
ja y
= 0 piiratud
kõvertrapetsit (joonisel 5.2 on see ümbritsetud pideva joonega ).
Tähistame
selle kujundi pindala sümboliga S. Meie eesmärk on tuletada valem
pindala S jaoks. Selleks jaotame lõigu [a, b] n osalõiguks
punktidega x0,
x1,
x2,
. . . , xn,
kusjuures a = x0
Fikseerime
igal osalõigul [xi−1,
xi]
ühe punkti pi.
Tähistame Δxi
= xi
− xi−1
.
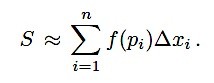
Terve
kõvertrapetsi ligikaudse pindala valemi saame, kui summeerime
osapiirkondade pindalad :
Saame ligikaudsest valemist järgmise täpse valemi pindala jaoks:
Oma
geomeetrilise sisu tõttu nimetatakse seda valemit ristkülikvalemiks.
35.
Määratud integraali omadused
36.
Teoreem muutuva ü lemise rajaga integraalist ilma tõestuseta.
NEWTON- LEIBNITZI VALEM
Teoreem
muutuva ülemise rajaga integraalist
Teoreem:
Kui f on pidev lõigul [a, b], siis funktsioon Φ, mis avaldub
valemiga Φ(x) = ∫ xa f(t)dt, on funktsiooni
f algfunktsioon lõigul [a, b].
Newton-Leibnitzi
valem.
Teoreem:
Kui F on pideva funktsiooni f algfunktsioon lõigul [a, b], siis
kehtib valem
∫ba
f(x)dx = F(b) − F(a) =: F(x)|ba
37.
Kirjeldada asendusvõtet määratud integraali arvutamisel. Esitada
ositi integreerimise valem määratud integraali jaoks
Ositi
integreerimise valem:
38. Üks määratud integraali rakendus omal valikul, koos
tõestusega
Tõestada
keha ruumala valem ristlõigete pindalade kaudu ja tuletada sellest
pöördkeha ruumala valem
Olgu
antud ruumiline keha V
, mis paikneb
tasandite x =
a ja
x =
b vahel.
Tähistame selle keha ruumala samuti V
-ga. Tuletame
valemi V
arvutamiseks.
Tekkiva ristlõike pindala sõltub lõiketasandi asukohast, seega on
ta muutuja x
funktsioon.
Tähistame ristlõike pindala S
(x)
-ga. Eeldame, et S
(x)
on pidev.
Tükeldame
lõigu [a, b]
osalõikudeks punktidega
a
=
=
b.
Valime
igal osalõigul [,
]
ühe punkti .
Tähistame Δ
=
-
Vaatleme
tasandite x =
ja x =
vahele
jäävat keha kihti Δ.
Kui Δ
on
väike, siis muutub ristlõike pindala S
(x)
osalõigul [,
]
vähe ja me saame ta lugeda ligikaudselt võrdseks S
()-ga,
st
S
(x)
≈ S ()
kui x ∈
[,
].
Sellisel
juhul on Δ
ligikaudselt
silinder, mille põhja pindala ja kõrgus on vastavalt S
()
ja Δ.
Seega avaldub Δ
ruumala
ligikaudselt valemiga
Terve
keha ruumala ligikaudse valemi saame summeerides
ruumalad:
Mida
peenem on lõigu [a,
b] jaotus, seda
täpsem on ligikaudne võrdus Δ
≈ S ()Δ
ning seda täpsem
on ka terve keha ruumala valem. Teisest küljest: valemi paremal
poolel seisab funktsiooni S
integraalsumma
lõigul [a, b].
Järelikult saame pikima osalõigu pikkuse
lähenemisel
nullile järgmise täpse valemi keha
ruumala
jaoks ristlõigete pindalade järgi:
Pöördkeha
ruumala
Olgu
antud funktsioon f lõigul [a,
b]. Eeldame, et f
(x)
on pidev ja f (x)
≥ 0.
Vaatleme joontega y
= f
(x),
x = a,
x = b
ja y
= 0 piiratud
kõvertrapetsit K.
Paneme kujundi K
pöörlema ümber
x-telje.
Tulemusena saame pöördkeha V.
Keha V
lõikamisel x-teljega
ristuva tasandiga tekkiv lõige on ring, mille raadius võrdub f
(x)-ga
(sest kujundi K
kõrgus punktis x
on f
(x)).
Seega on ristlõike pindala
ja üldisest keha ruumala valemist saame järgmise valemi V
ruumala jaoks:

































Kõik kommentaarid