EKSAMIKÜSIMUSED 2005
Sisukord
Sisukord ..................................................................................................................................................... 1
Arvuti
riistvara matemaatilised alused ...................................................................................................... 4 Kahendsüsteem .............................................................................................................................. 4
Boole funktsioonid ja nende esitus................................................................................................ 4 Diskreetne aeg ............................................................................................................................... 4
Lihtsamaid Boole` funktsioone realiseerivad
loogikaelemendid ............................................................. 5 AND .............................................................................................................................................. 5 OR ................................................................................................................................................. 5 NOT ............................................................................................................................................... 5
NAND ........................................................................................................................................... 5 NOR .............................................................................................................................................. 6
Mikroskeemide valmistamise
tehnoloogiad .............................................................................................. 6
Mikroskeemide valmistamise tehnoloogiad .............................................................................................. 6 unipolaarsed tehnoloogiad (
Metal Oxide
Semiconductor Field Effect Transistor -
MOSFET ) .............................................................................................................................................. 6 o n-
channel MOS (Metal Oxide Semiconductor - MOS) ............................................................ 6 o p-channel MOS ......................................................................................................................... 6 o Complementary MOS (
CMOS ) ................................................................................................. 6 bipolaarsed tehnoloogiad (Bipolar IC Technologies) ................................................................... 6 o
diood loogika (
Diod Logic - DL) .............................................................................................. 6 o diood transistor loogika ( Diod Transistor Logic - DTL).......................................................... 6 o transistor transistor loogika (Transistor Transistor Logic - TTL) ............................................. 6 o emittersidestuses loogika (Emitter-Coupled Logic - ECL) ....................................................... 6 o
integral injektsioon loogika (Interrated Injektion Logic - IIL).................................................. 6 kolme
olekuga väljund .................................................................................................................. 7 avatud suudmega/kollektoriga loogikaelemendid ......................................................................... 7
Enamkasutatavaid kombinatsioonskeeme ................................................................................................. 7 välistav või (eXclusive-OR) .......................................................................................................... 7 multiplexor (Multiplexers) ............................................................................................................ 7
summaator (Adder) ........................................................................................................................ 7 ALU ( Arithmetic-Logic
Unit ) ...................................................................................................... 8
dekooder (Decoder)....................................................................................................................... 8
koodimuundur (
Code Converter) .................................................................................................. 9
Enamkasutatavaid järjestikskeeme ............................................................................................................ 9
trigerid (
Flip /
flop ,
latch ) ................................................................................................................ 9
registrid (Registers) nihkega ja ilma ........................................................................................... 11
loendurid (
Counter ) ..................................................................................................................... 13
Protsessor ................................................................................................................................................ 14 Protsessori üldstruktuur ............................................................................................................... 14 o käsuloendur (PC -
Program Counter, IP - Instruction Pointer) ............................................... 16
1 o käsuregister (IR - Instruction
Register ) ................................................................................... 17 o käsudekooder (Instruction Decoder) ....................................................................................... 18 o
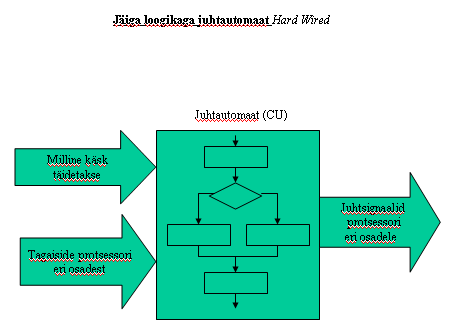
juhtautomaat (CU -
Control Unit) ........................................................................................... 18 o operatsioonautomaat (Data
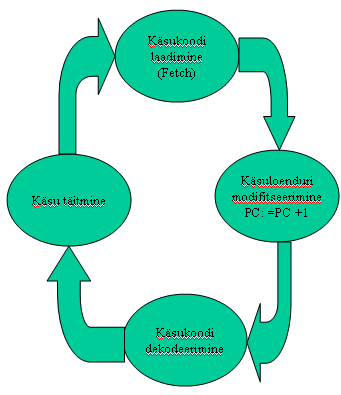
Path ) ........................................................................................... 19 Käsu täitmine protsessoris (Instruction Execution, fetch-decode-execute
cycle ) ....................... 21
RISC -
CISC protsessor............................................................................................................... 22
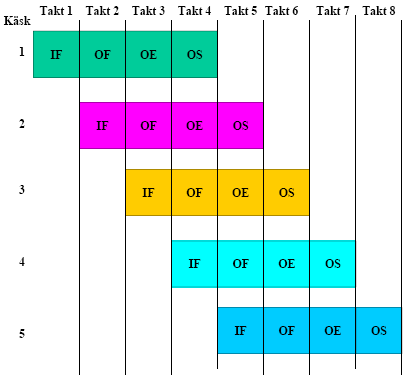
Konveier protsessoris (
Pipeline ) ................................................................................................. 23
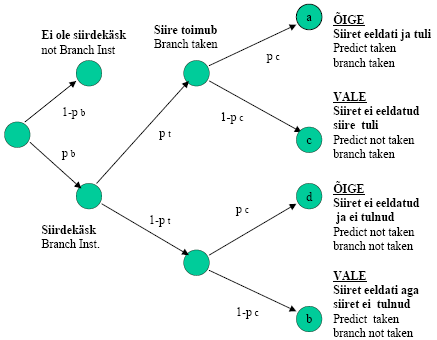
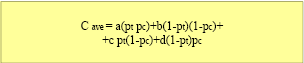
Siirete (
hargnemiste )
ennustamine .(
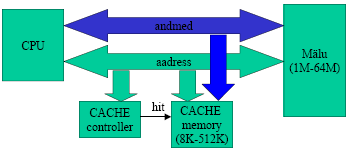
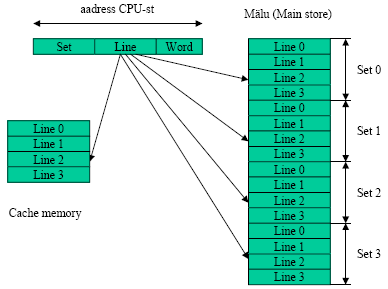
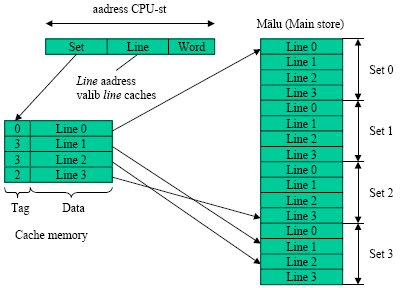
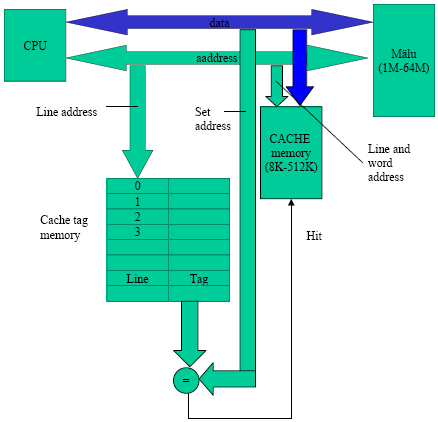
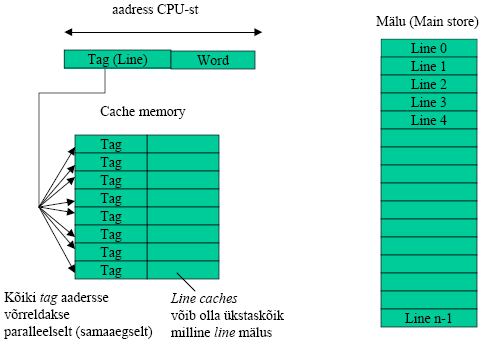
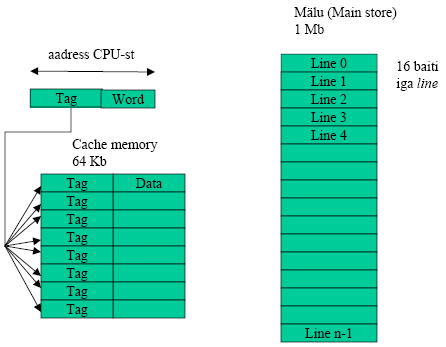
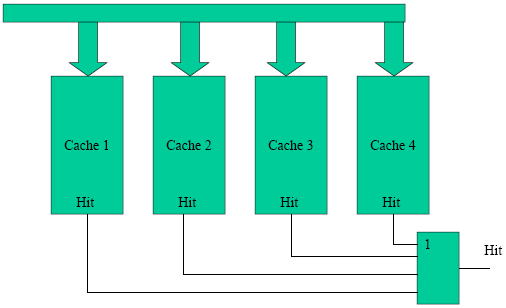
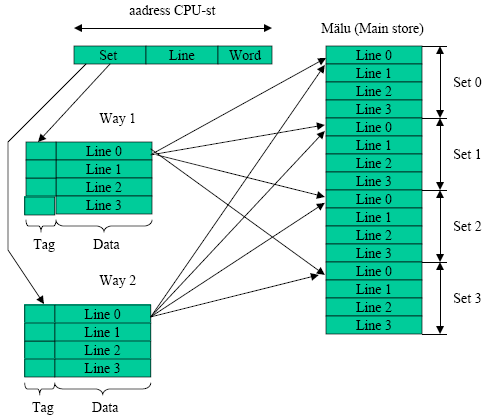
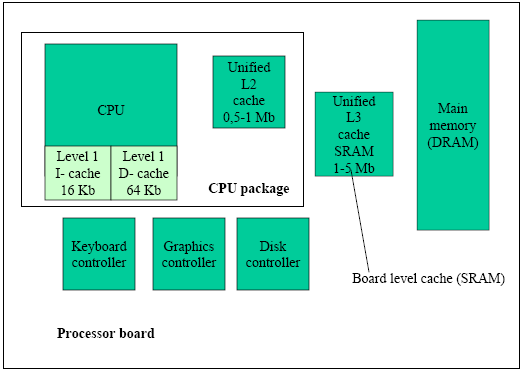
Branch Prediction ) ............................................................. 24 Peidikmälu, vahemälu (
Cache ) ................................................................................................... 25
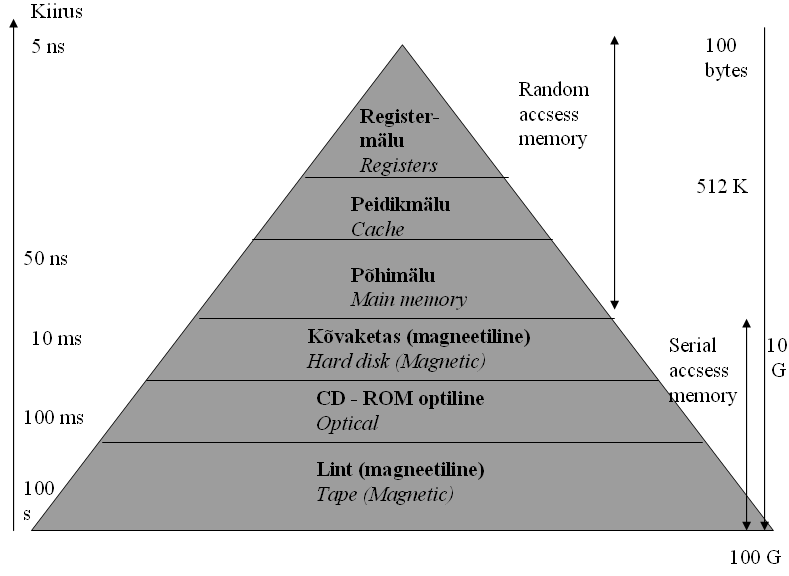
Arvuti mälu ............................................................................................................................................. 30 Mälu hierarhia arvutis (
Memory hierarchy) ................................................................................ 32 Arvuti mälu
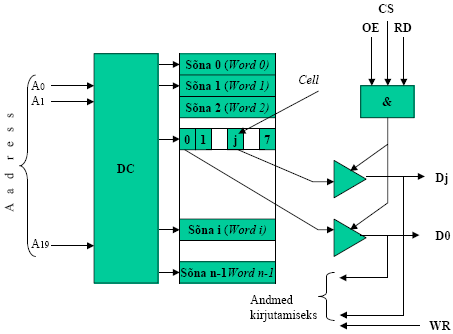
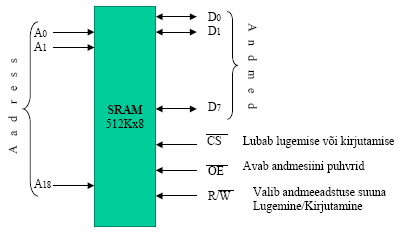
klassifikatsioon (Computer memory classification) ............................................... 33 Muutmälu (RAM) ....................................................................................................................... 33 Staatiline
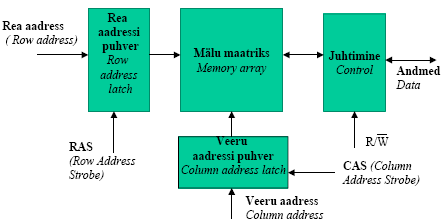
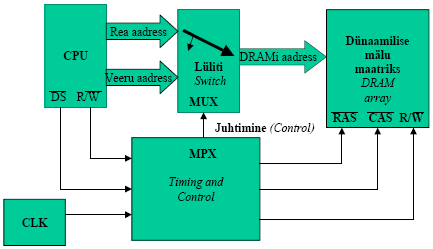
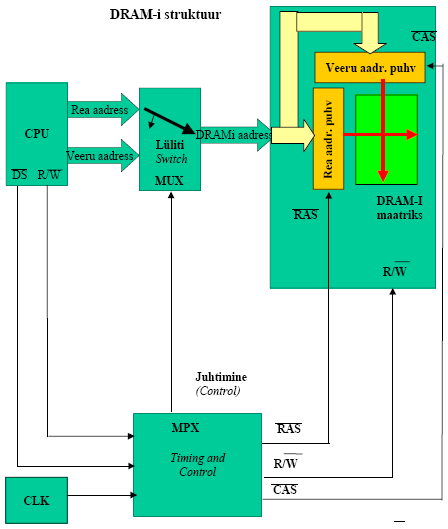
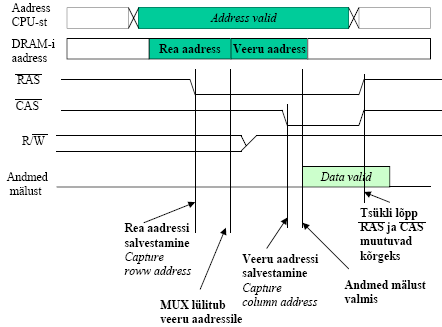
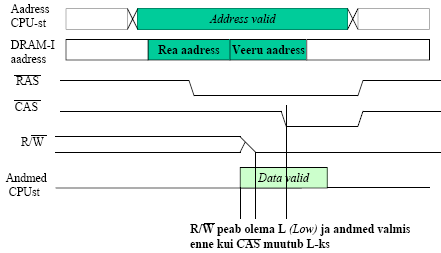
pooljuht suvapöördusmälu (Static RAM) .................................................................... 34 Dünaamiline pooljuht suvapöördusmälu (
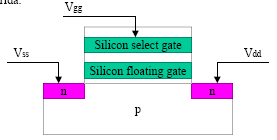
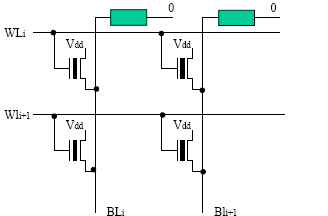
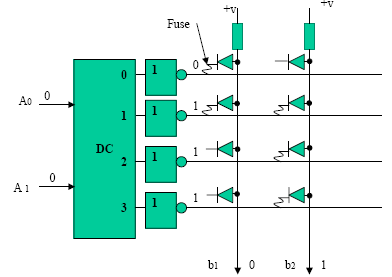
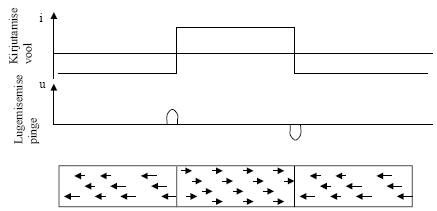
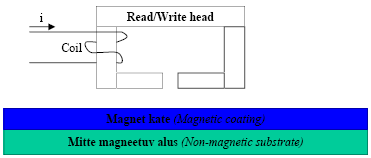
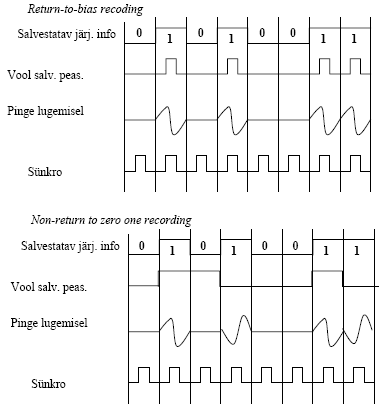
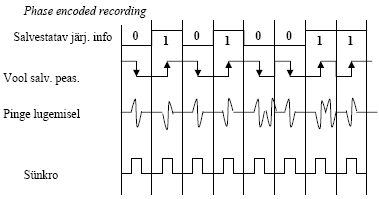
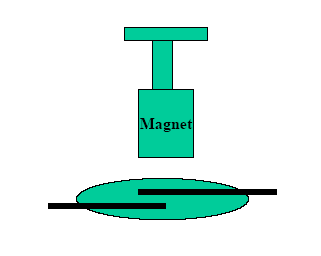
Dynamic RAM) ......................................................... 36 Püsimälu (ROM - Read Only Memory) ...................................................................................... 38 Magnet mäluseadmed (Magnetic memory) ................................................................................. 40 o Mullmälu (
Bubble ) .................................................................................................................. 41 o Pehme
ketas (
Floppy ) .............................................................................................................. 41 o Kõvaketas (
Hard drive ) ........................................................................................................... 41 o Magnet ketas ........................................................................................................................... 42 o
Lint (Tape)............................................................................................................................... 42
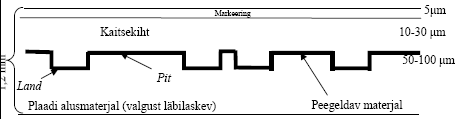
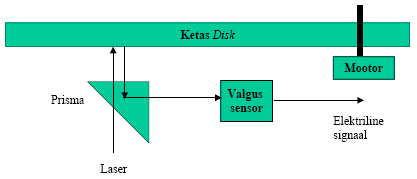
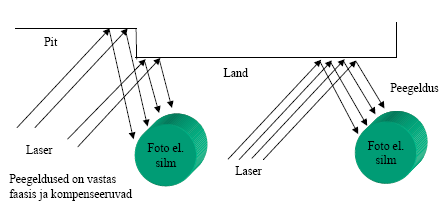
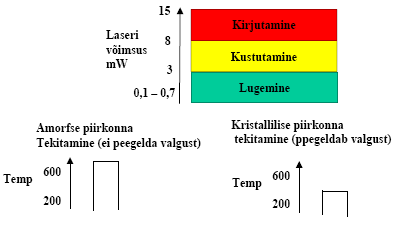
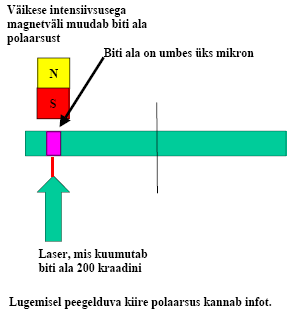
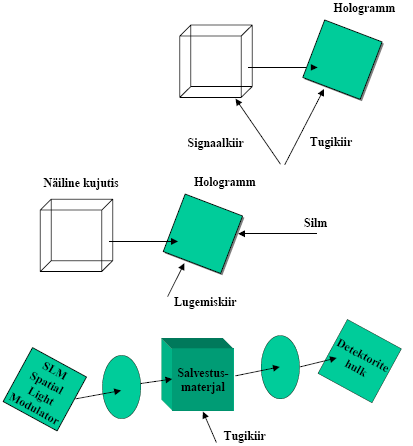
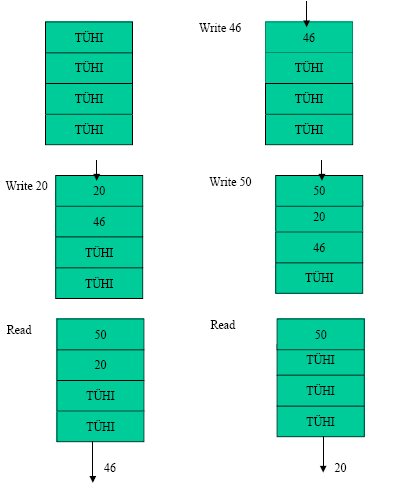
Optilised mäluseadmed (Optic memory) ..................................................................................... 43 o CD-ROM ................................................................................................................................. 44 o CD R ..................................................................................................................................... 44 o CD RW ................................................................................................................................. 44 o DVD ........................................................................................................................................ 44 o Magnetoptiline (MO) .............................................................................................................. 44 o Holograafiline.......................................................................................................................... 46 Erinevate pöördus viisidega mälud ( pinumälu (Stack,
LIFO ), puhvermälu (
FIFO ) ) ............... 46 o Stack ........................................................................................................................................ 46 o LIFO ........................................................................................................................................ 46 o FIFO ........................................................................................................................................ 46
Käsusüsteem ja adresseerimine. .............................................................................................................. 34 Käsuformaadid ja käsusüsteem (Instruction set) ........................................................................ 47
Adresseerimise viisid (Addressing modes) ................................................................................. 47
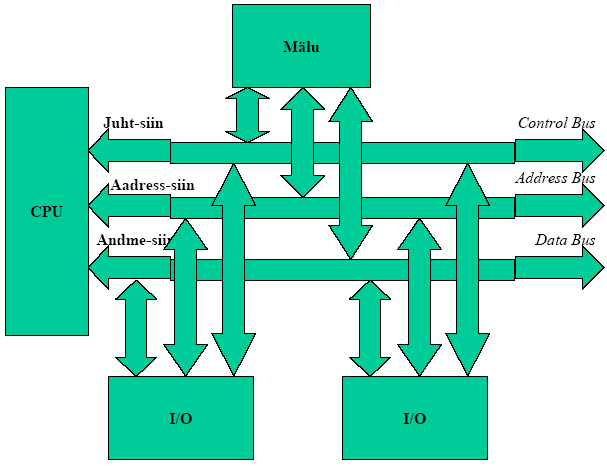
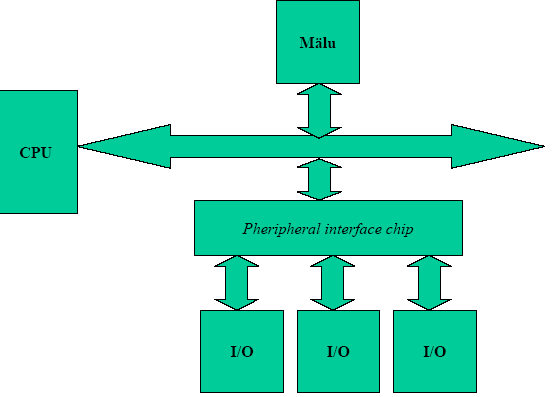
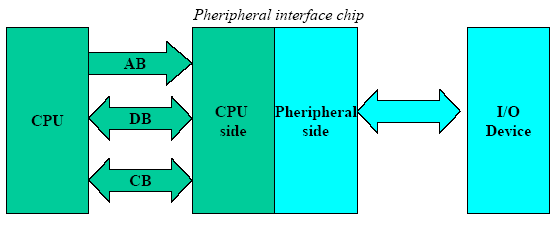
Mikroarvuti riistvara ............................................................................................................................... 47 Mikroarvuti
arhitektuur ja
siinid . ................................................................................................ 47 Erinevad siinid ja nende osa andmevahetuses. ............................................................................ 48
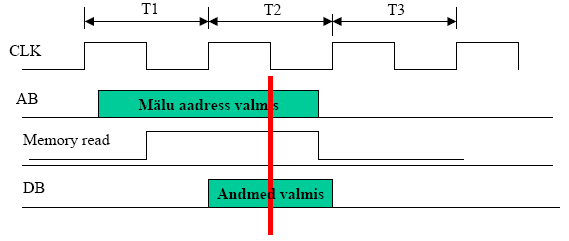
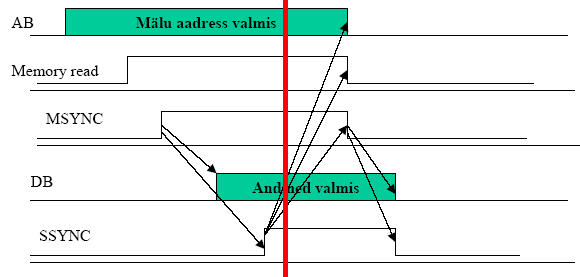
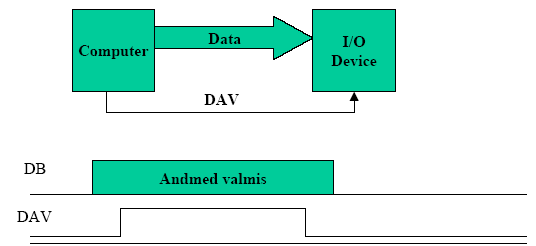
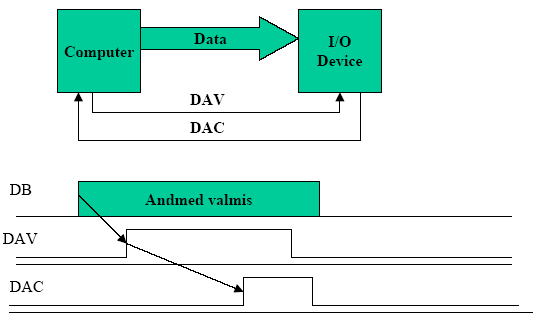
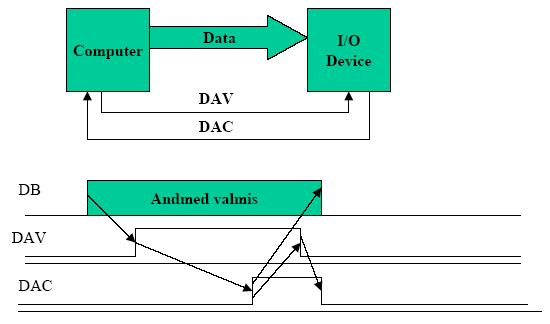
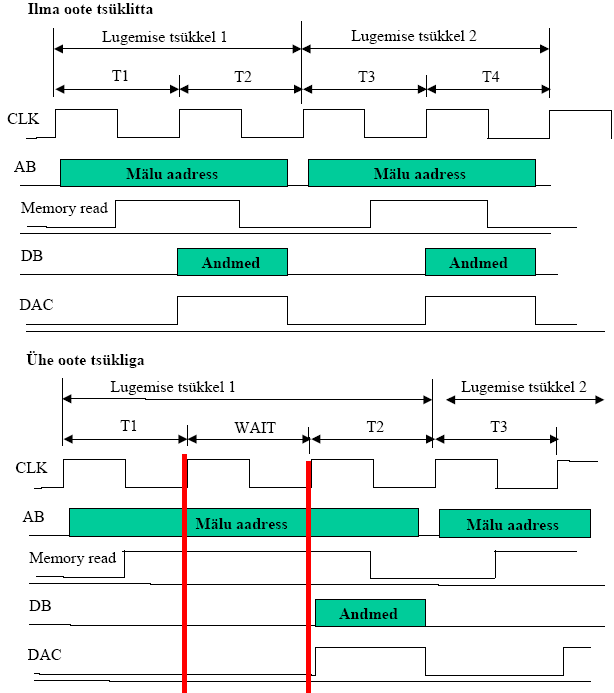
Andmeedastus protokollid ........................................................................................................... 49
Andmevahetuse juhtimine (Bus
arbitration )............................................................................... 51
Sisend -väljund seadmete ja protsessori
andmevahetus .............................................................. 52
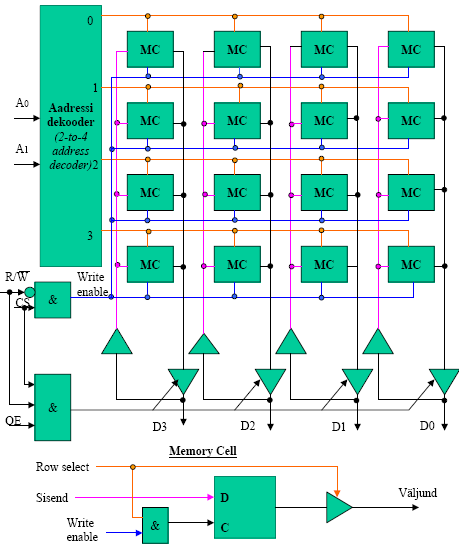
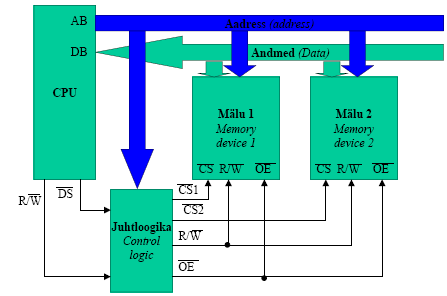
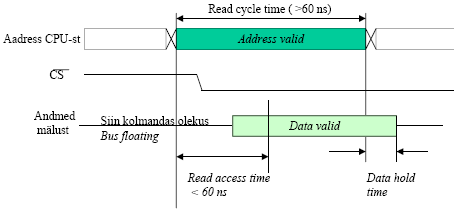
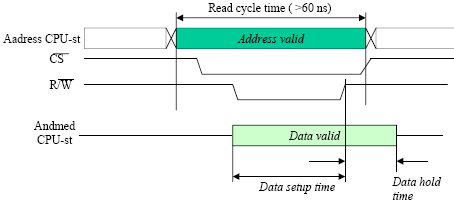
Mikroprotsessori juurde kuuluvad komponendid ( Supporting System) ..................................... 52 o Mälu kontroller (Memory controller) ...................................................................................... 52
2 o Peidikmälu, vahemälu kontroller (Cashe controller) .............................................................. 52 o Siini kontroller (Bus controller) .............................................................................................. 52 o Mälu otsepöördus reziimi kontroller (DMA controller) .......................................................... 52 o Programmeeritav katkestuste kontroller (Programmable interrupt controller) ..................... 52 o Programmeeritav
taimer (Programmable interval timer controller)........................................ 52
Sisend-väljund
seadmed .......................................................................................................................... 52
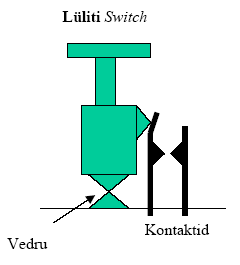
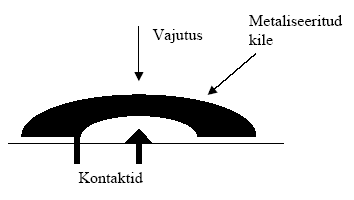
Klaviatuur (Keyboard) ................................................................................................................ 52
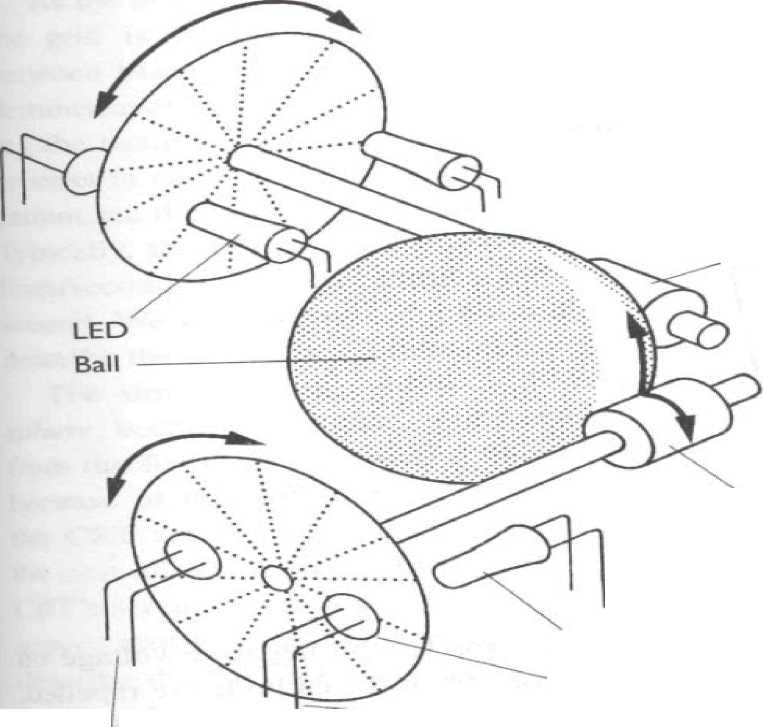
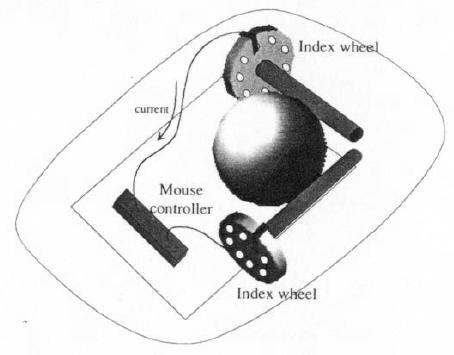
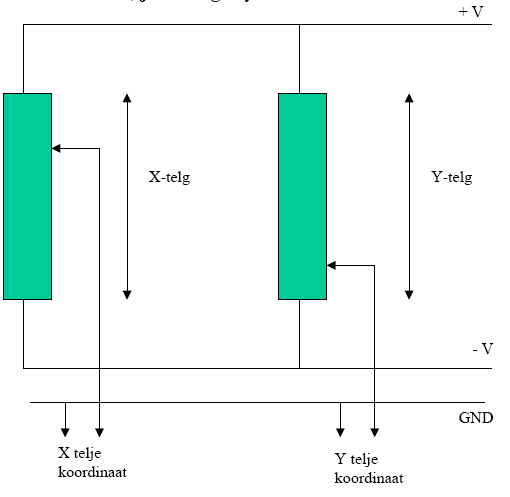
Hiir ja juhtkang (
Mouse and joystick) ........................................................................................ 55
Kuvar (
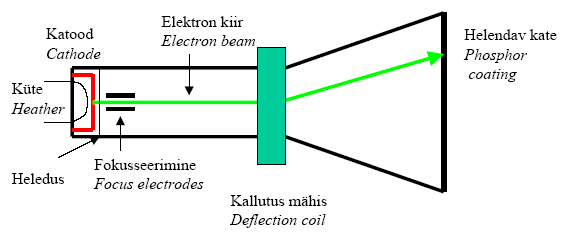
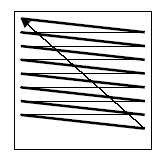
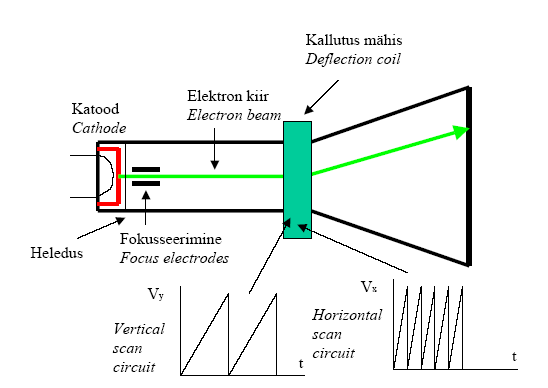
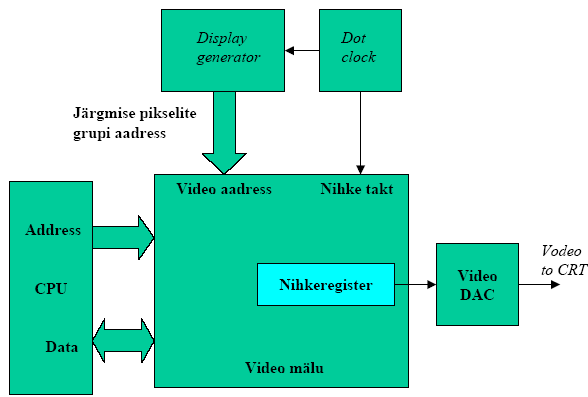
Display ) ........................................................................................................................... 57 o CRT (Cathode Ray
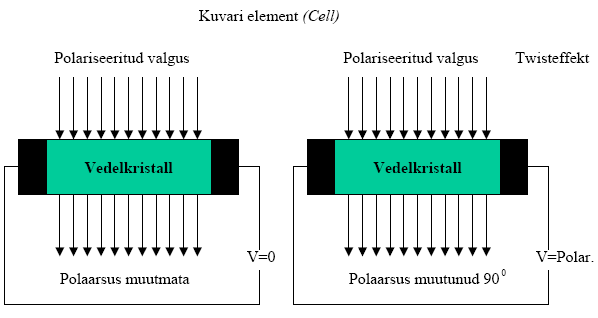
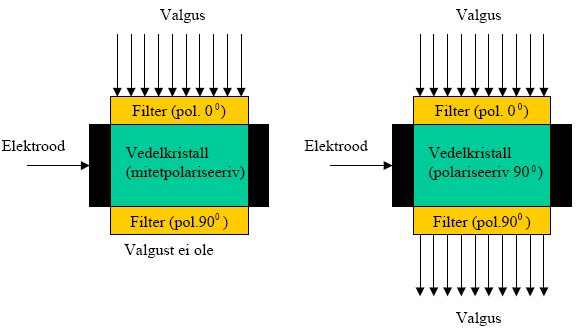
Tube ) kuvar ............................................................................................. 57 o kujundi moodustamine ............................................................................................................ 57 o videomälu (Video memory) .................................................................................................... 58 o vedelkristall kuvar LCD (
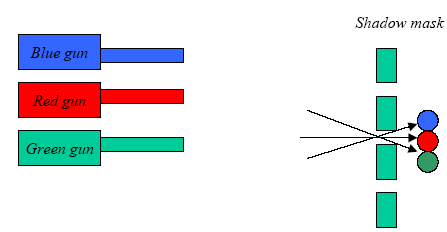
Liquid Crystal Display) .................................................................. 59 o värviline kujund....................................................................................................................... 61
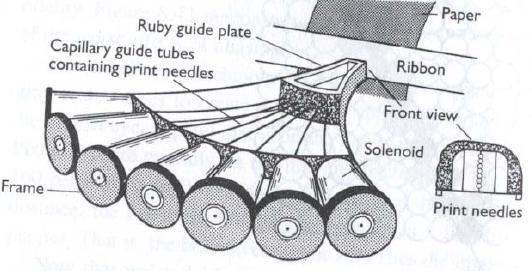
Printer Printer .............................................................................................................................. 61 o maatriksprinter (Dot
matrix printer) ....................................................................................... 61 o laserprinter (Laser Printer) ...................................................................................................... 62 o
jugaprinter (
Inkjet Printer) ...................................................................................................... 63 o värviprinterid ........................................................................................................................... 63
Plotter .......................................................................................................................................... 63
Skanner ........................................................................................................................................ 64
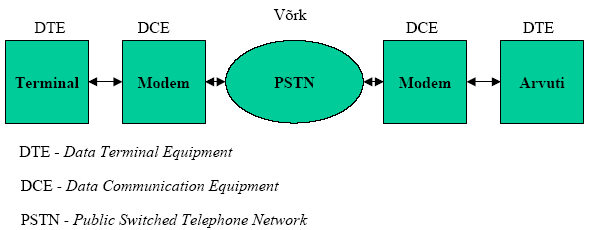
Modem (Modem) ........................................................................................................................ 65
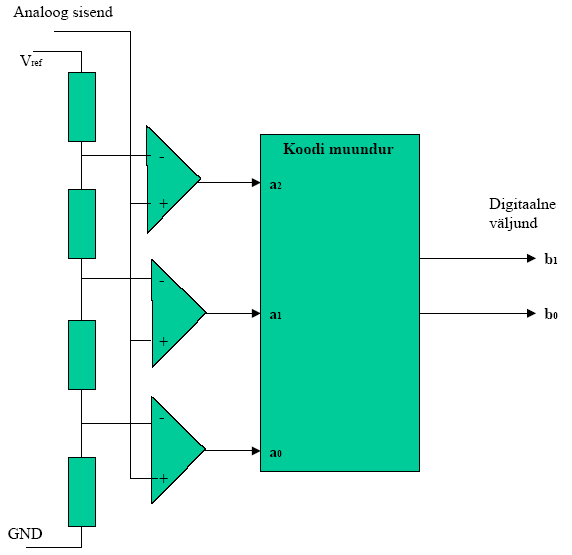
Analoog liides (Analog
Interface ) ............................................................................................... 65 o analoog-
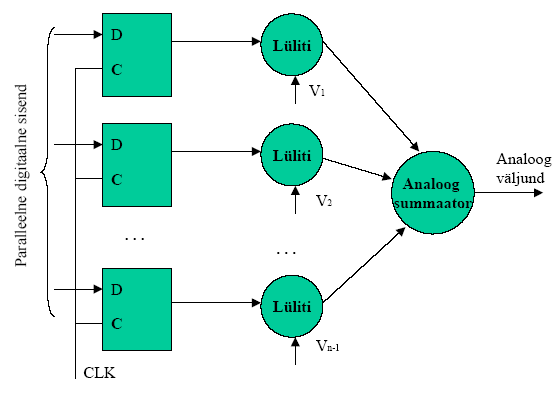
digitaal muundur (Analog to
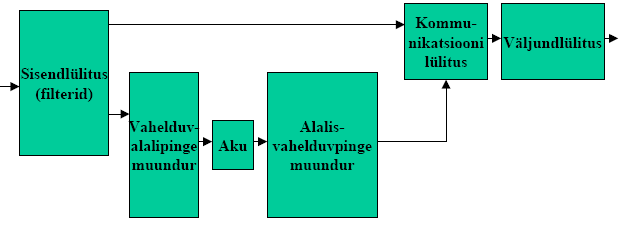
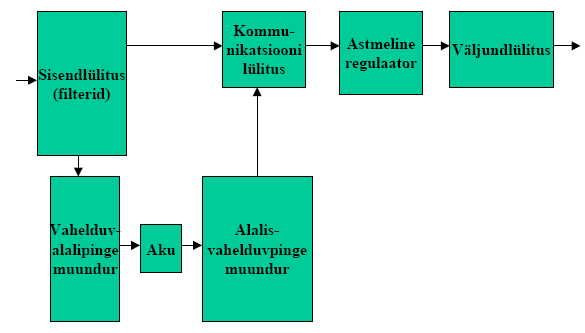
Digital Conversion) .................................................... 65 o digital-analoog muundur (Digital to Analog Conversion) ...................................................... 66 UPS- Uninterruptible
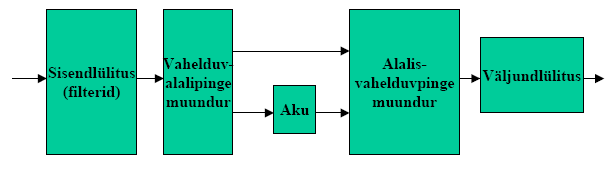
power supply ............................................................................................ 66
Spetsiaalse riistvara ................................................................................................................................. 68 Spetsiaalse riistvara realiseerimise võimalused. ......................................................................... 68 o Programne
realisatsioon .......................................................................................................... 68 o Riistvaraline realisatsioon ....................................................................................................... 69 o Programmeeritav loogika ........................................................................................................ 69 Erinevate spetsiaalse riistvara realiseerimise võimaluste kasutusvaldkonnad ja võrdlus. .......... 72
Arvutite riistvara veakindlus. .................................................................................................................. 72
Rikked arvuti riistvaras. .............................................................................................................. 72
Testimine . .................................................................................................................................... 73 Testitava riistvara
projekteerimine .............................................................................................. 74 Veakindlad koodid ...................................................................................................................... 74 Töökindluse tõstmine. ................................................................................................................. 74
3 Arvuti riistvara matemaatilised alused Kahendsüsteem Kahendsüsteem on positsiooniline arvusüsteem, mille alus on 2.
Seega kasutatakse kahendsüsteemis kahte numbrimärki, milleks tavaliselt on 0 ja 1. Tihti öeldakse numbrimärgi 1 kohta tõene ja numbrimärgi 0 kohta väär -- seda seetõttu, et
selliselt käsitletakse neid kahendloogikas.
Kahendsüsteemis esitatakse arve samal põhimõttel nagu kümnendsüsteemis. Erinevus on ainult selles, et kümnendsüsteemi alus on 10 ja vastavalt ka numbrimärke on 10. Näiteks arv kaks esitatakse kahendsüsteemis kujul 10 (üks kaheline pluss 0 ühelist), arv 6 kujul 110 (üks neljaline pluss üks kaheline pluss 0 ühelist) ja arv 999 kujul 1111100111 (üks viiesajakaheteistkümneline pluss üks kahesajaviiekümnekuueline pluss üks sajakahekümnekaheksaline pluss üks kuuekümneneljaline pluss üks kolmekümnekaheline pluss null kuueteistkümnelist pluss null kaheksalist pluss üks neljaline pluss üks kaheline pluss üks üheline).
Kahendsüsteem on arvutikeele alus.
Kahendsüsteemi arvukoht tähistab vastavat kahe astet, nagu kümnendsüsteemi arvukoht tähistab vastavat kümne astet (10 on kümnendsüsteemis 10^1=10, sest 1 on tagant teisel kohal, kahendsüsteemis 2^1=10 samal põhjusel).
Esimesed arvud kahendsüsteemis: 0, 1, 10=2, 11, 100=4, 101, 110, 111, 1000=8, 1001,
1010 , 1011, 1100, 1101, 1110, 1111, 10000=16. Nagu siit näha, korrutab iga nulli lisamine arvu kahega.
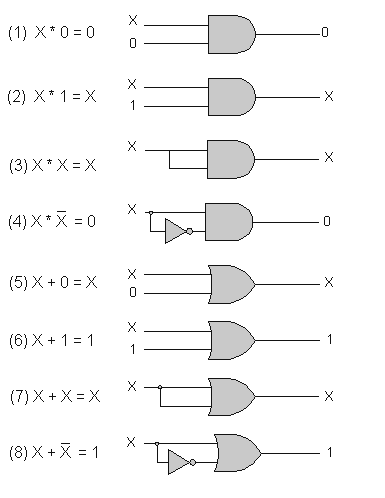
Boole funktsioonid ja nende esitus
Korrutamine 0×0=0 0×1=0 1×0=0 1×1=1
Liitmine 0+0=0 0+1=1 1+0=1 1 + 1 = 10
Lahutamine 0-0=0 01=-1 1-0=1 1-1=0 Diskreetne aeg
4 Lihtsamaid Boole` funktsioone realiseerivad
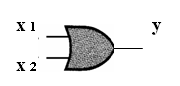
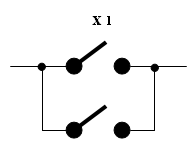
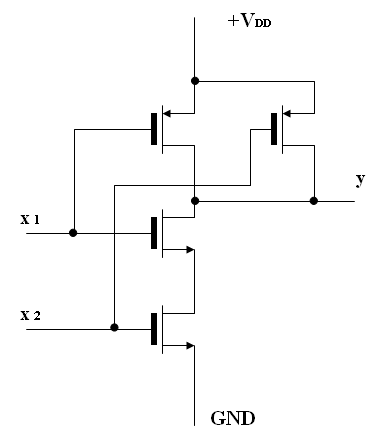
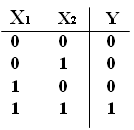
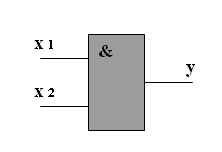
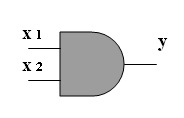
loogikaelemendid AND
OR
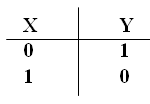
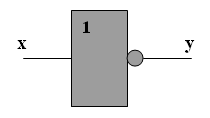
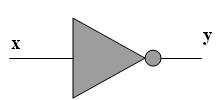
NOT
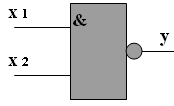
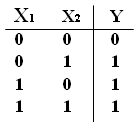
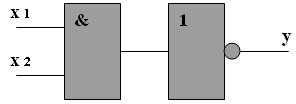
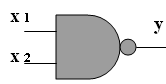
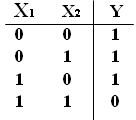
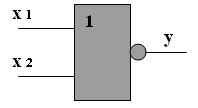
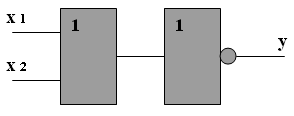
NAND
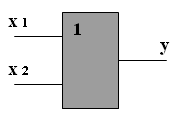
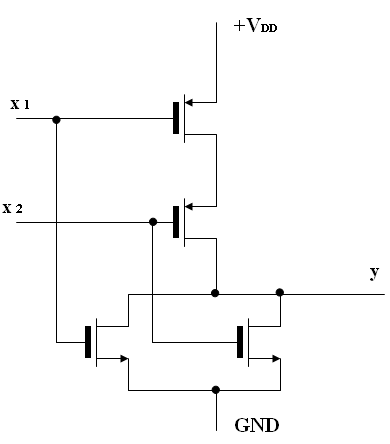
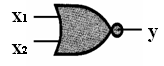
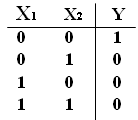
5 NOR
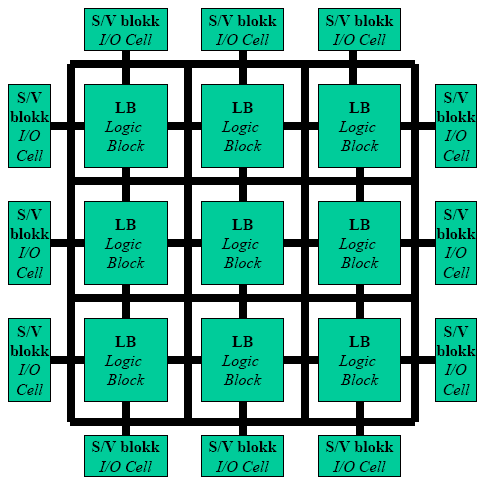
Mikroskeemide valmistamise tehnoloogiad
unipolaarsed tehnoloogiad (Metal Oxide Semiconductor Field Effect Transistor - MOSFET) o n-channel MOS (Metal Oxide Semiconductor - MOS) o p-channel MOS o Complementary MOS (CMOS) (Üksteist täiendav MOS) bipolaarsed tehnoloogiad (Bipolar IC Technologies) o diood loogika (Diod Logic - DL) o diood transistor loogika ( Diod Transistor Logic - DTL) o transistor transistor loogika (Transistor Transistor Logic - TTL)
suure võimsusega ( high power, H type) madala võimsusega ( low power, L type) Schotky TTL
o emittersidestuses loogika (Emitter-Coupled Logic - ECL) o integral injektsioon loogika (Interrated Injektion Logic - IIL)
6 kolme olekuga väljund avatud suudmega/kollektoriga loogikaelemendid
Enamkasutatavaid kombinatsioonskeeme välistav või (eXclusive-OR)
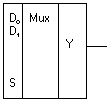
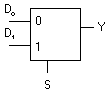
multiplexor (Multiplexers) Multipleksor kujutab endast andmeselektorit. Multipleksoril on mitu
sisendit ja üks väljund.
Sisendid jagunevad infosisenditeks ja juhtsisenditeks,
kusjuures infosisendite arv määrab ära juhtsisendite arvu ning vastupidi. Vastavalt juhtsignaalile kommuteeritakse multipleksori väljundisse
signaal ühest infosisendist. Kommuteeritavate infosisendite arv võrdub 2 n, kus n on juhtsisendite arv. Järelikult saab kahe juhtsisendiga ehk kahebitise koodiga kommuteerida 4 sisendit, kolme juhtsisendiga 8 sisendit jne.
Piisava arvu
sisenditega multipleksori abil saab realiseerida suvalisi loogikafunktsioone.
Tähistused:
summaator (Adder)
Summaatoriks nim. arvuti loogikalülitust, mis on ette nähtud arvkoodide aritmeetiliseks summeerimiseks. Mitmejärgulise kahendarvu summaator koosneb mitmest ühejärgulisest summaatorist. Arvu summeerimisel tuleb lisaks kahe summeeritava arvu vastavatele järkudele liita nendega ka nooremate järkude summeerimisel tekkinud ülekanne. Seega on ühejärgulisel summaatoril kolm sisendit ning 2 väljundit. (kaks sisendit ja kolm väljundit?)
Poolsummaator - ei arvesta liitmisel eelmisest järgust tulenevat ülekannet. Kasutades kahte poolsummaatorit, on alati saadav üks täissummaator.
Täissummaator -
arvestab liitmisel eelmisest järgust tulenevat ülekannet
Jada ülekandega e. järjestikülekandega summaatoris moodustatakse väljundsignaal arvukohtade järjestikku summeerimisega, alates kõige nooremast (parempoolsest) kuni kõige vanema ehk vasakpoolsemani välja. Arvukoha summeerimiseks ja ülekande moodustamiseks
7 kulub teatud aeg, mida ülekande seisukohalt võib vaadelda hilistumisena. Kuna ülekanne toimub järjestikku, siis aeglustab see summaatori tööd. Suure
kohtade arvu korral on koguhilistumine võrdne hilistumise
summaga üksikutes kohtades.
Rööpülekandega e. paralleelülekandega summaatorid töötavad palju kiiremini kui jadaülekandega summaatorid. Mitmekohalise kahendarvu summeerimisel moodustatakse ülekanne korraga kõigi kohtade jaoks. Seetõttu ei kulu ülekandeks lisaaega ning summaator töötab kiiremini kui jadaülekande korral.
Kiire ülekandega summaatorid - nende puhul on rakendatud rööpülekannde põhimõtet kombineeritult koos jadaülekandega. Ülekanded on moodustatud kõigi kohtade jaoks korraga.
Lahutajad - A-B=V
1) otseteel (kõigi
variantide analüüs)
2) matemaatiliselt
Vahe
avaldis langeb kokku summa avaldisega. Ja kui joonistada skeem, siis teab, et see skeem on võimeline nii
liitma kui ka
lahutama .
M= 0 ,toimub
summeerimine +
M= 1 ,toimub lahutamine -
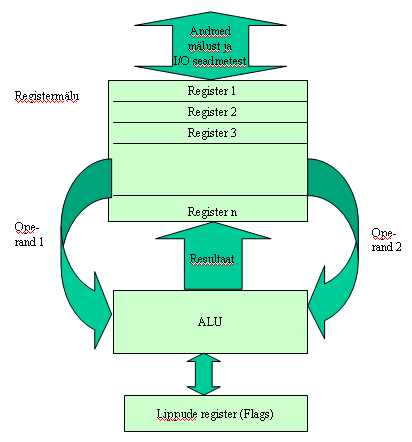
ALU ( Arithmetic-Logic Unit) Sõltumata arvuti ja protsessori ehitusest on arvutis alati üks skeemiosa, kus teostatakse otsesed
arvutustehted ja muu infotöötlus nimelt aritmeetika-
loogikaseade ehk ALU (Arithmetical and
Logical Unit). Eri protsessoritel on üldiselt erinev tehete hulk ja valik, kuid tavaliselt hõlmab see aritmeetilisi (minimaalselt liitmine ja lahutamine) ning loogilisi tehteid (JA, VÕI, EITUS) ja nihutusoperatsioone (kahendarvu bitid nihutatakse oma senise positsiooni suhtes kas vasakule või paremale).
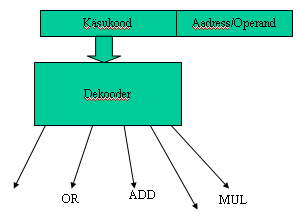
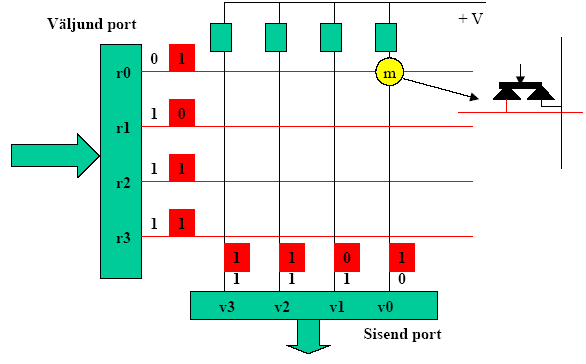
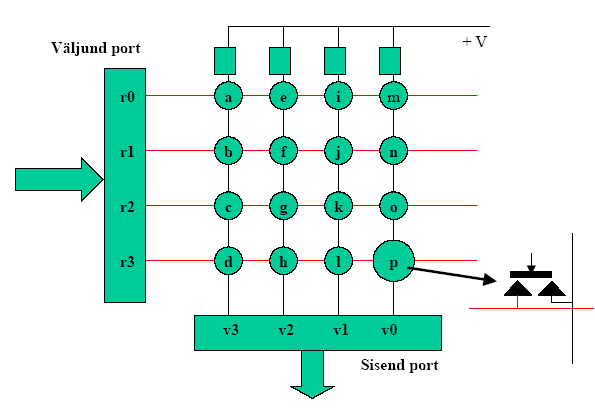
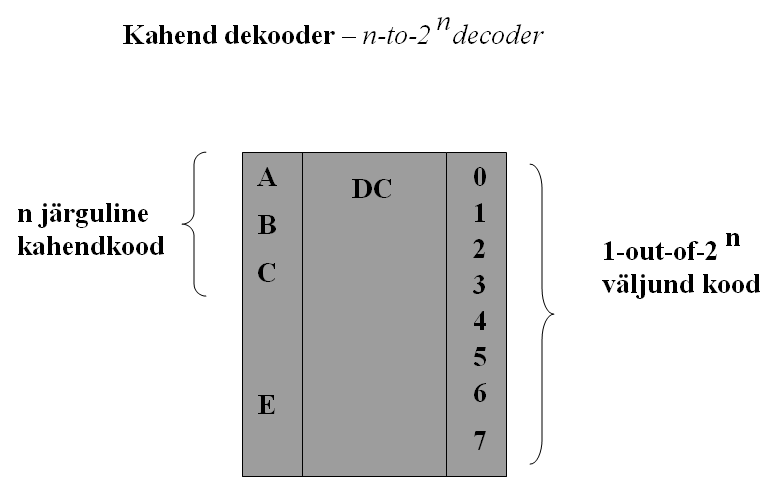
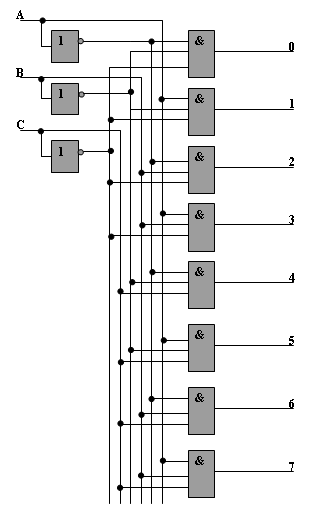
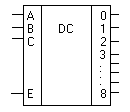
dekooder (Decoder) Dekooder on lülitus, mis on ette nähtud etteantud sisendkoodi muundamiseks soovitud väljundkoodiks. Ta tunneb ära sisestatava kahendarvu ja annab signali vastavasse väljundisse.
Dekoodri ülesandeks on muundada kahendkoodis arv niisuguseks koodiks, millega saab aktiveerida nõutava mälupesa, juhtida number- või tähtindikaatorit, tunda ära mitmesuguseid kodeeritud signaale, muundada kahendkoodis antud arv kümnendsüsteemi arvuks jne.
Üldjuhul on dekoodril nii mitu sisendit n, kui mitu kohta on sisendisse antaval kahendarvul. Maksimaalne väljundite arv võrdub kombinatsioonide arvuga 2n . Dekoodrid koostatakse peamiselt NING- elementidest.
Suure sisendite arvu korral kasutatakse dekodeerimiseks nn. kaskaadlülitust, kus esimese astme dekooder aktiveerib ühe teise astme dekoodri ning see omakorda ühe väljundi.
8 koodimuundur (Code Converter) Muundab ühte tüüpi koodi teist tüüpi koodiks. Näiteks muundab kahendkoodi kümnendkoodiks.
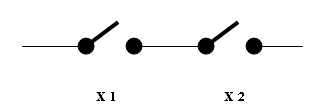
Enamkasutatavaid järjestikskeeme trigerid (Flip/flop, latch)
9
Triger on mäluelement, mis säilitab 1 biti informatsiooni. Triger on kahe stabiilse olekuga
loogikalülitus (1 või 0).
Trigeri olek vastab tema väljundsignaalile. Sõltuvalt sisendsignaalist
säilitab triger endise oleku või muudab seda hüppeliselt.
Trigeril tavaliselt 2 väljundit: otsene Q ja
invertne Q .
Tööpõhimõtte järgi jaotatakse trigerid seadesisenditega ehk SR- trigeriteks, loendussisenditega e.
T-trigeriteks, andmesisenditega ehk D-trigeriteks ning universaalsisenditega e. JK-trigeriteks.
Kui trigeri oleku muutmine toimub kasvõi ühe sisendi kaudu täiendava sünkroniseerimis signaali
abil, nim. trigerit sünkroonseks, vastupidisel juhul aga asünkroonseks. Sõltuvalt tööpõhimõttest
ning ehitusest liigitatakse trigerid ühe- või kahetaktiliseks.
Triger on elementaarne salvestuselement, millel on 2 olekut. Kasutatakse mäluelementidena
registrites, loendurites jne. Informatsiooni salvestusviisi järgi jagunevad 2-ks:
1) asünkroonsed - salvestatakse infi vahetult sisenditesse antud signaalidega.
2) sünkroonsed - see on võimalik ainult sünkroimpulsi olemasolul.
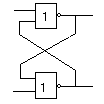
RS (
reset -set) , ühe ja
kahetaktiline , antud on asünkroonne, R=S=1 on keelatud. Töötab: RS; Q(t),
00>Q(t-1) , 01= 1, 10= 0, 11=-- .
R S Qt 0 0 Qt-1 ei muutu 0 1 1 Set 1 0 0 reset 1 1 - keelatud
*a-sünkroonne | * sünkroonne
NB! Keelatud on anda mõlemasse |
sisendisse signaal 1.
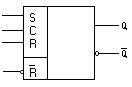
Sünkroonne ühetaktiline SR-triger erineb asünkroonsest selle poolest, et trigeri olek muutub vaid
kindlail sünkroimpulssidega määratud ajahetkeil. Lisaks infosisenditele S ja R on tal veel
sünkroseerimis sisend C (
clock ). Sünkroniseeritud infosisend toimib hetkel, mil saabub
sünkroniseerimis- signaal.
Kahetaktiline sobib sinna (
skeemidesse ), kus on vaja saada tagasisidet. Näiteks mälu vaatamine
jne.
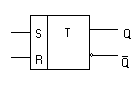
10 T (toggle), 1infosisendiga, iga järgmine impulss muudab trigeri oleku vastupidiseks, nn. loendustriger. Töötab: T; Q(t), 1= -Q(t-1), 0= Q(t-1).
T Qt 0 Qt-1 1 Qt-1
D (
delay ), data 1 infosisend, väljundis
kordab sisendi signaali, aga sünkroimpulsi võrra hiljem, saab säilitada lühiajaliselt infot. Töötab: CD; Q(t) , 0 - =Q(t-1) , 11= 1, 10= 0. D trigeril on kaks sisendit D andmesisend ja C clock sisend.
Niikaua kui C=0, säilitab triger oma väärtust. Kui C=1, siis antakse trigerile D väärtus, kas 0 või 1, oleneb D väärtusest. Seega säilitab D triger oma väärtust seni kuni tuleb uuesti clock sisendisse1. Ehk kui C=1, Q=D ja C läheb nulliks(C=0), nüüd on trigeri väärtus Q=D kuni aja t pärast tuleb uuesti sisend C=1 ja siis saab Q väärtuseks jälle D väärtus.
C D Qt 0 - Qt-1 1 1 1 1 0 0
JK (jump-key),
samasugune nagu RS-triger, aint selle vahega et ei ole keelatud
kombinatsiooni . Siin on lubatud J=K=1, mis muudab väljundi vastupidiseks. Töötab: JK; Q(t), 00= Q , 01= 0, 10= 1, 11= Q .
J K Qt-1 Qt 0 0 0 0 0 0 1 1 0 1 0 0 0 1 1 0 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 0
MS (master-slave), kaksiktrigerid, siseviivitusega.
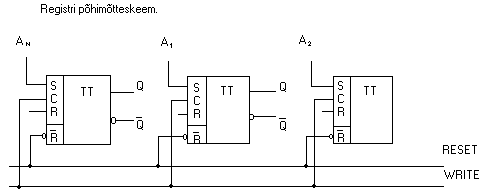
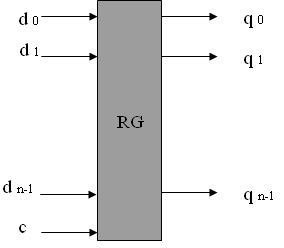
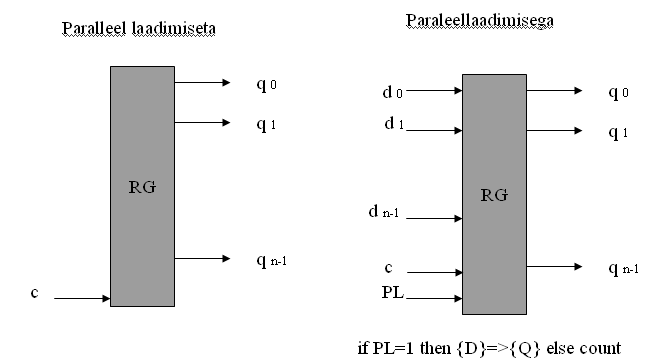
registrid (Registers) nihkega ja ilma Registriteks nim. trigeritest
koosnevat seadet , mis võimaldab
salvestada , säilitada ning taasesitada infot ühe sõna kaupa. Lisaks nihutatakse registri abil infosõna
bitte vasakule või paremale. Sõna nihutamisega muundatakse rööpkoodis esitatud info jadakoodiks ning vastupidi. Sõna pikkus sõltub registri
trigerite arvust ning võib olla väga erinev. Enam on levinud 8-, 16-, 24-, ja 32- bitised registrid, mis vastavad sõnapikkusele 1, 2, 3 ja 4
baiti .
Registrit juhitakse signaalidega: vastuvõtt (write) ja 0-seade (reset). Signaalidega write
kirjut . sisendite Aº...An informatsioon
registrisse , signaaliga reset aga kustutatakse sealt. Register on hulk ühtse juhtimisega
trigereid . Ta on trigeritel põhinev lülitus kahendarvude registreerimiseks.
11 (
Registriks nim seadet, mis võimaldab salvestada, säilitada ning taasesitada infot ühe infosõna
kaupa. Info säilib nii kaua kuni on
toide sees. Bitte on võimalik sisestada ja väljastada rööbiti ja
järjestikku. Rööbiti - mäluregister, järjestikku - nihkeregister. Registri põhiülesandeks on
mitmejärgulise arvu säilitamine. Register koosneb trigeritest, kus iga triger säilitab ühte
kahendarvu järku; n-järgulise arvu jaoks peab olema n trigerit. Registrit võib kasutada ka arvude
nihutamiseks paremale või vasakule (arvu järgud liiguvad korraga üks järk paremale v. vasakule),
arvujada esituse
viimiseks röökujule ja vastupidi. Sõltuvalt arvu esitusviisist jaotatakse registrid
jada- ja rööpregistriteks. Rööpregistrisse antakse säilitavana arvu kõik järgud korraga.
Jadaregistrisse antakse arvu järgud ühekaupa tavaliselt alates nooremast järgust.)
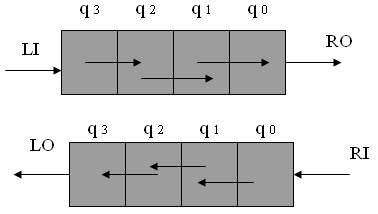
Ilma
nihketa register
Hulk ühise juhtimisega trigereid.
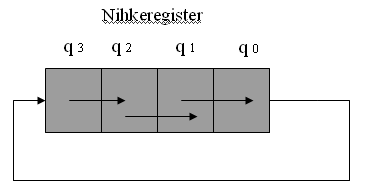
Nihkeregister
Registrid, millesse info
sisestamine ja väjastamine toimub järjestikku nim. nihkeregistriteks.
Nihkeregistri
koostamiseks kasut. nii RS-, D- kui ka JK- trigereid. Nihkeregistris ühendatakse
otsene ja inverteeritud väljund järgmise trigeri seadesisenditega S ja R. Seega toimub iga taktiga
infosõna
nihutamine ühe biti võrra. Sõltuvalt sellest kuidas trigerid omavahel ühendatakse, nihkub
infosõna kas paremale või vasakule . Iga
takti keskel nihutab sünkrosignaal info trigerite
esimesest astmest teise. Reversiivne register- selle puhul toimub kahesuunaline nihe.
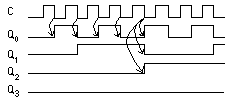
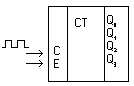
12 loendurid (Counter) Loenduriteks nimetatakse impulsside loendamiseks ette nähtud loogikalülitust. Loendureid kasutatakse nii automaatikaseadmetes kui ka arvutustehnikas.
Sisse tulevad impulsid. Väljundiks 0,1 kombinatsioonid. Erinevate väljundkombinatsioonide arvu nim.
mooduliks .
E- sisend, mis lubab loendamise
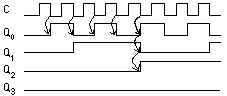
Kaks diagrammi- üks sünkroonse, teine asünkroonse jaoks.
Sünkroonne
loendur - ümberlülitumine toimub samaaegselt v. paralleelselt.
Ümberlülitumisaeg on kogu aeg samasugune.
Kasut. arvutites andmetöötluses.
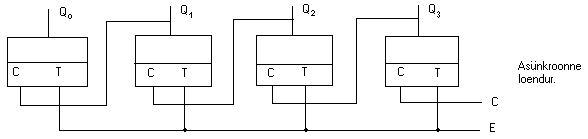
Asünkroonne - ümberlülitusaeg pole samasugune.
Uue kombinatsiooni
ilmumine sõltub sellest, missugusele üleminek toimub.
Kasut. indikatsiooniseadmetes ja sagedusjagajates.
13
Kahendloendur - on järjestikulised kahendkoodid.
Kümnendloendur - järjestikuskoodid on 0-9 ja moodul on 10. See tähendab , et loenduril on 10 erinevat kombinatsiooni, millega ta vastab sissetulevale impulsijadale.
Suvalise mooduliga e.
grey koodiga loendurid kõik järgnevad koodid on naaberkoodid.
g= QI+ QI +1
Suvalise mooduliga e. naaberkoodid on koodid, mis erinevad teineteisest ainult ühe kahendjärgu poolest. Gray koodi puhul lülitub korraga ümber ainult 1 triger.
Reversiivne loendur - Loendur, mis
loendab nii pos kui ka neg suunas. Loendussuuna muutmine sõltub sellest, kas ülekandeks kasutatakse trigeri otsest või inverteeritud signaali.
Ringloendur - Loendur, mis on moodustatud nihkeregistrist, kui selle väljund ühendada sisendiga.
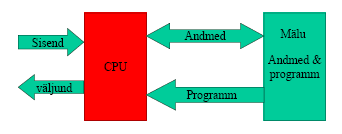
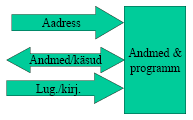
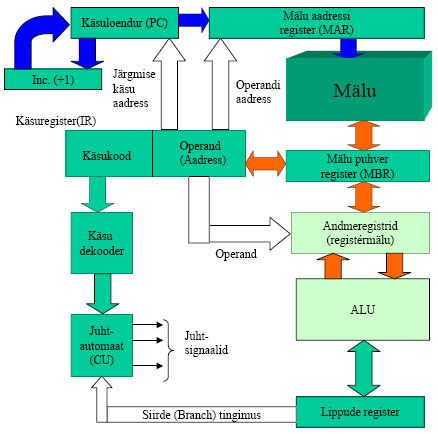
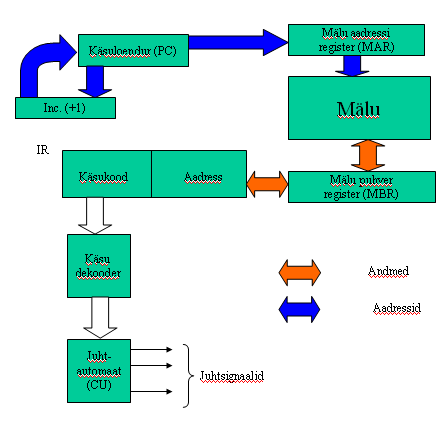
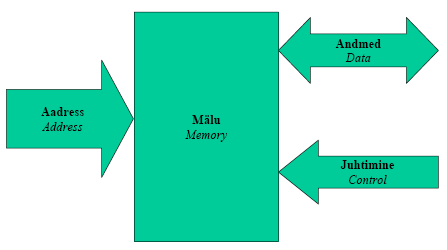
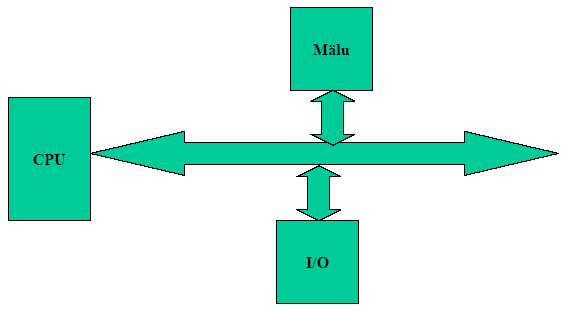
Protsessor Protsessori üldstruktuur Protsessori ja mälu osa andmetöötluses:
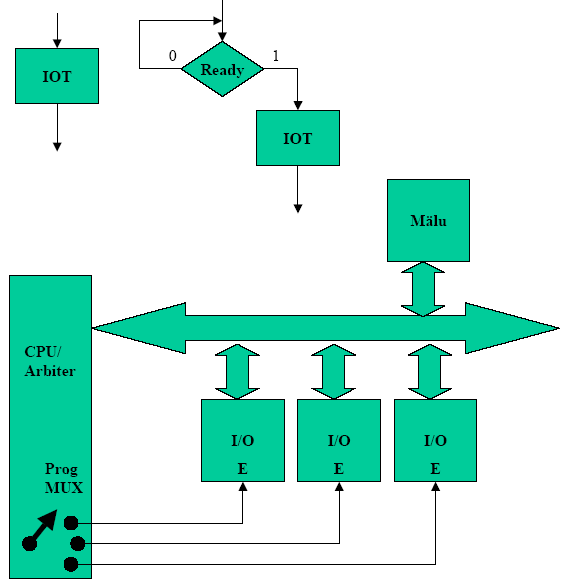
Arvutis säilitatakse
programme (käskude jada) ja andmeid mälus kahendkujul (0-de ja 1-de jada). Põhiliselt on kasutusel von Neumanni tüüpi arvuti arhitektuur kus nii käsud kui ka andmed asuvad samas mälus. Eksisteerib ka Harvardi arhitektur kus on eraldi mälu käskudele ja andmetele. Kogu programmi täitmine eeldab pidevat andmevahetust protsessori ja mälu vahel. Protsessorisse loetakse käske ja andmeid ning mällu
14
kirjutatakse resultaate (andmeid, mitte käske). Sisend ja väljund ei pruugi toimuda üljuhul läbi
protsessori vaid võib olla teostatud ka otse mälu ja sisend-väljund seadmete vahelise
andmevahetusena.
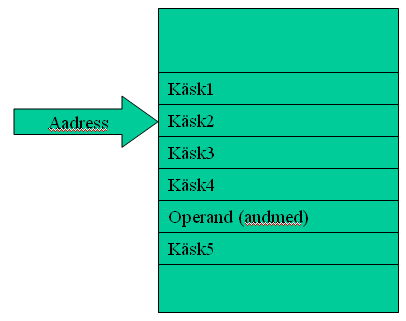
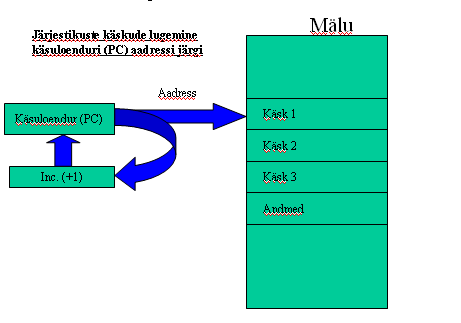
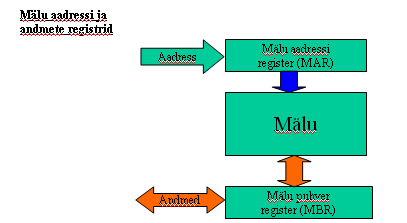
Mälust saab lugeda ja sinna kirjutada käske-andmeid sõnade kaupa. Eri protsessoritel on erinev
sõna järgulisus. Aadress on
kahend kood (number) mis näitab millise sõna poole toimub
pöördumine.
Mälus on taoline 0-de ja 1-de jada. Koodi enda järgi ei ole võimalik eristatda kus on andmed ja
kus käsud. Protsessorist peab
tulema aadress mis näitab millisesõna poole pöördutakse. Lugemise
korral peab juba protsessor teadma kas sõna interpreteerida käsuna või andmetena.
Kõrgtaseme keel
assembler
masinkood :
Kõrgtaseme keeles kirjutatud programmi (käskude) jada ei ole arvuti riistvara võimeline täitma.
Riistvaras on olemas ainult pingenivoo mis vastab väärtusele 1 ja teine pingenivoo mis vastab
väärtusele 0.Sellepärast teisendatakse programselt (transleeritakse) kõik
programmid lõpuks
masinkoodi. Masinkoodis vastab igale käsule oma
kahendkood . Millised on transleerimise vahe
etapid ja kuidas seda tehakse on tarkvaraprobleem, aga lõpuks peab ta olema masinkoodis, et
protsessori riistvara saaks read täita.
Kõrgtaseme keel If n





























































































Kõik kommentaarid