Arvutite-eksam.docx
●
Kui te leiate vea siis osutage sellele kommentaariga (“Insert” ->”Comment” või
märgi osa sellel parem klõps ning “Comment”).
●
Küsimuste järel on vastamise koht. Vastamisel lisage kindlasti küsimus ja järjekorra
number!
TUBLID OLETE! :) Kes ütles? Palume autorit! :-)
Kuidas kasutada Google Doc-si, õppevideo: http://www.youtube.com/watch?v=lMqdex3KDQM
Rene 1-6
1.
Käsu täitmine protsessoris (käsuloendur, käsuregister, käsu dekooder, operatsioon
automaat ja juhtautomaat).
2.
Arvuti mälu hierarhia.
3.
Analoog info, ADC, DAC ja helikaart.
4.
Pooljuhtmälud.
5.
Konveier protsessoris ja mälus.
6.
Virtuaal mälu.
TAUSTAVÄRVIGA KÜSIMUSED ON VASTAMATA!!!
PIIA 7-12
8.
Andmevahetus mikroarvutis (erinevad siinid ja nende osa andmevahetuses, AB, DB,
CB).
7.
Erinevad siinid ja nende osa andmevahetuses (AB, DB, CB).
9.
Optilised mäluseadmed.
10.
Vahemälu ( Cache) organiseerimine (otsevastavusega, assotsiatiivne, kogum
assotsiatiivne).
11.
Enamkasutatavad kombinatsioonskeemid.
12.
Klaviatuur.
SILVER 13-18
13.
Paralleelarvutid (SISD, SIMD, MIMD, MISD).
14.
Printerid ja värviline trükk.
15.
Magnetmäluseadmed.
16.
Mikroskeemide valmistamise tehnoloogiad
17.
Erineva pöördumis viisidega mälud :LIFO, FIFO, assotsiatiivmälu ja kahe pordiga mälu.
18.
RISC ja CISC protsessorid, mikroprogramm.
TAUSTAVÄRVIGA KÜSIMUSED ON VASTAMATA!!!
MIHKEL 19-22
19.
Arvutite veakindlus, veakindlad koodid.*
20.
Enamkasutatavad järjestiskeemid.
21.
Suvapöördusmälud. *
22.
LCD, LED, OLED, plasma kuvarid. *
23.
Puutetundlikud ekraanid. *
24.
RAID ja SSD kettad. *
JEVGENI 23-29 - Fancy color
25.
Katkematu pingeallikas (UPS).
26.
Adresseerimise viisid.
27.
Mikroarvuti ja siinid (AB, DB, CB).
28.
Alamprogrammide poole pöördumine ja pinumälu.
29.
Käsuformaadid : 0, 1, 2, 3 ja 1,5 aadressiga arvutid.
30.
Arvuti mälu klassifikatsioon.
Doris - 30-32
31.
Siinide juhtimine - katkestusteta süsteem, katkestustega süsteem ja prioriteedid.
32.
Pinumälu (Stack) - realiseerimine ja kasutamine
TAUSTAVÄRVIGA KÜSIMUSED ON VASTAMATA!!!
Hannes 34 - 36
33.
Püsimälud : ROM, PROM, EPROM, EEPROM ja Flash.
34.
Siirete ennustamine (Branch prediction): vajadus, meetodid.
35.
Spetsialse riistvara realiseerimine.
VASTUSED
1. Protsessori struktuur : käsuloendur, käsuregister, käsu dekooder, juhtautomaat ja
operatsioonautomaat.
Protsessor
· Protsessori üldstruktuur
Protsessori ja mälu osa andmetöötluses:
Arvutis säilitatakse programme (käskude jada) ja andmeid mälus kahendkujul (0-de ja 1-de jada).
Põhiliselt on kasutusel von Neumanni tüüpi arvuti arhitektuur, kus nii käsud kui ka andmed asuvad
samas mälus. Eksisteerib ka Harvardi arhitektuur kus on eraldi mälu käskudele ja andmetele. Koguprogrammi täitmine eeldab pidevat andmevahetust protsessori ja mälu vahel. Protsessorisse loetakse
käske ja andmeid ning mällu kirjutatakse resultaate (andmeid, mitte käske). Sisend ja väljund ei pruugi
toimuda üldjuhul läbi protsessori vaid võib olla teostatud ka otse mälu ja sisend-väljund seadmete
vahelise andmevahetusena.
Mälust saab lugeda ja sinna kirjutada käske-andmeid sõnade kaupa. Eri protsessoritel on erinev sõna
järgulisus. Aadress on kahend kood (number) mis näitab millise sõna poole toimub pöördumine.
Mälus on taoline 0-de ja 1-de jada. Koodi enda järgi ei ole võimalik eristatda kus on andmed ja kus käsud.
Protsessorist peab tulema aadress mis näitab millisesõna poole pöördutakse. Lugemise korral peab juba
protsessor teadma kas sõna interpreteerida käsuna või andmetena.
Kõrgtaseme keel – assembler – masinkood:
Kõrgtaseme keeles kirjutatud programmi (käskude) jada ei ole arvuti riistvara võimeline täitma.
Riistvaras on olemas ainult pingenivoo, mis vastab väärtusele 1 ja teine pingenivoo, mis vastab väärtusele
0. Sellepärast teisendatakse programselt (transleeritakse) kõik programmid lõpuks masinkoodi.
Masinkoodis vastab igale käsule oma kahendkood. Millised on transleerimise vahe etapid ja kuidas seda
tehakse on tarkvaraprobleem, aga lõpuks peab ta olema masinkoodis, et protsessori riistvara saaks read
täita.
Kõrgtaseme keel If n<100 then a:= b
High-level language
else v[i]:=k[j-1]
end;
Assembler keel
ADD a,b,c
Assembly language MOV d, M
XOR c,d
Masinkood 00110111001110
Binary machine
11000110010100
language 11110100000101
11110000011100
Järgnevalt on toodud protsessori üldstruktuur, mille erinevaid koostisosi hakkame allpool eraldi vaatama.
Sellise struktuuriga protsessor võimaldab täita kõiki programme.o käsuloendur (PC - Program Counter, IP - Instruction Pointer)
Eeldame, et meil on mälus programm (käskude jada) ja nende vahel ei ole andmeid. Üldiselt on nad
segamini, kuid programmis võib ka olla selline lõik. Selle programmi lõigu täitmisel on meil vaja
protsessoris “järjehoidjat”, et teada millise käsu täitmise juures ollakse. Selleks kasutatakse käsuloendurit
(Intel on kasutanud ka käsuosuti (Instruction Pointer) mõistet). Loendur on siin loogikaelement, kus
hoitakse järgmisena täitmisele tuleva käsu aadressi. Loendurit kasutatakse sellepärast, et temale on lihtne
teha +1 (ühe võrra suurendamist) ja panna ta näitama järgmisele käsule. Käsuloenduri juures on
kasutatud loenduri, kui loogikaelemendi mõistet, millel järjehoidja on realiseeritud ja käsuosuti puhul on
terminis tema ülesanne. Mõlemal juhul on tegemist ühe ja sama asjaga. Käsuloendur sisaldab mingi käsu
täitmisel alati järgmise käsu aadressi (mitte täitmisel oleva). Järgmise käsu aadress on näiteks vajalikkatkestuste korral ja alamprogrammi poole pöördumisel, et fikseerida tagasipöörde aadress.
Vaadeldes praegu käsu täitmise protsessi, on tehtud lihtsustusi protsessori ja mälu andmevahetuses. Mälul
on aadressi register, kuhu saadetakse aadress ning puhver register, kuhu lugemisel tuleb sõna mälust
(käsukood või andmed) ja kirjutamisel paneb protsessor sinna sõna, mis salvestatakse mälus vastavalt
aadressile.
o käsuregister (IR - Instruction Register)
Kui protsessor väljastab käsuloendurist (PC) aadressi ja saab mälust käsu koodi, siis salvestatakse see
käsuregistrisse. Käsuregistri väljundisse on ühendatud dekooder. Dekoodri väljunditest on iga
sisendkoodi korral aktiivne ainult üks väljaund. Nüüd läheb käsudekoodril aktiivseks väljund, mis näitab
millise käsu kood loeti protsessorisse. Kõik käsud sisaldavad alati käsukoodi, kuid sealjuures võib olla ka
andmeid või aadress.
Aktiivne dekoodri väljund näitab, millise käsu kood on käsuregistris.
o käsudekooder (Instruction Decoder)
Toodud eelmises punktis käsuregistriga koos.o juhtautomaat (CU - Control Unit)
Juhtautomaat kujutab endast käsu täitmise algoritmi riistvaralist realisatsiooni loogikaskeemina. Peale
üldosa vastab igale käsule , mida protsessor on võimeline täitma (kuulub tema käsusüsteemi), algoritmis
oma haru. Käsu dekodeerimise järgi toimub mikroprogrammis hargnemine.Selle hargnemise
realiseerimiseks peab juhtautomaati tulema käsudekoodrist info selle kohta, milline on täitmisele tulev
käsk. Mõnede käskude täitmisel on vaja realiseerida mikroprogrammis hargnemisi, mis sõltuvad
protsessori mõne teise osa seisundist. Näiteks on vaja teada korrutamise realiseerimisel liitmise ja
nihutamise abil eelneva ALU operatsiooni tulemuse võrdumist nulliga.
Põhimõtteliselt on juhtautomaadi realiseerimiseks kaks võimalust:
1) jäiga loogikaga juhtautomaat: Jäiga loogika korral realiseeritakse algoritm loogikaskeemina kristalli
pinnal ja iga muutus käsusüsteemis tähendab uue loogikaskeemi realiseerimist.
2) püsimälus säilitatava mikroprogrammiga juhtautomaat: Kui mikroprogrammi hoitakse püsimälus
(näiteks Flash), siis saab käsusüsteemis teha muudatusi ilma uut loogikaskeemi koostamatta. Kogu
mikroprogrammi täitmine taandub sõnade lugemisele mikroprogrammi sisaldavast püsimälust. Mingil
määral toimib see analoogiliselt programmi täitmisega protsessoris.o operatsioonautomaat (Data Path)
Operatsioonautomaat (OA) on vahetu andmete teisendaja. OA koosneb registermälust, ALU-st ja lippude
registrist. Registermälu on väga kiire (SRAM tehnoloogia) ja väikesemahuline mälu vahetult
teisendatavate operandide ja resultaatide salvestamiseks. Kuidas leida operandid ja kuhu salvestada
resultaadid, määratakse käsukoodiga , mis käivitab juhtautomaadis vastava algoritmi. Mõne käsu
täitmisel võivad operandid läbida korduvalt. Näiteks kui ALU-s puudub korrutamise riistvaraline
realisatsioon, saab seda teha ka nihutamise ja liitmise abil. Lippude registries säilitatakse info alus
teostatud operatsioonide tulemuste kohta (tulemus oli null, tekkis ületäitumise, tekkis ülekanne jne.).· Käsu täitmine protsessoris (Instruction Execution, fetch-decode-execute cycle)
Järgnevalt on toodud käsu täitmise juhtimine protsessoris:
Pärast käsukoodi dekodeerimist asub käsukoodi edasist täitmist juhtima juhtautomaat. Iga käsu täitmine
koosneb teatud hulga elementaar operatsioonide (mikrooperatsioonid) teostamisest. Mikrooperatsioone
täidetakse teatud algoritmi (mikroprogramm) alusel. Juhtautomaat kujutab endast käsu täitmise
algoritmi riistavaralist realisatsiooni. Kõikide käskude täitmise algoritmidel on alguses ühisosa (käsukoodi
lugemine, käsuloenduri modifitseerimine jne) ja pärast dekodeerimist täidetav spetsiaalosa (operandide
lugemine, ALU operatsioonid, resultaadi salvestamine jne.).
Käsu täitmise tsükkel (von Neumanni tsükkel):Inglise keeles kasutatakse ka nimetust fetch-decode-execute cycle. Alumisel pildil on kogu käsu täitmine
võetud kokku ühe tsüklina.
2. Arvuti mälu hierarhia.
Arvutisüsteemis on tavaliselt mitut tüüpi mälusid, mis moodustavad mälude hierarhia. Selle võib jagada
kõrgema- ja alamataseme mäludeks. Kõrgema taseme mälud on enamasti kiiremad, väiksemad ja üldiselt ka
hävimälud(ehk kustuvad kui arvuti lülitatakse välja). Alamate tasemete mälud on sagedamini aeglasemad,
suuremad ja üldiselt säilmälud. Kõrgema taseme mälud on registrid, protsessori vahemälu ja täiendav vahemälu
ja alama taseme mäludeks on põhimälu ja massmälu. Kõrgema taseme mälus tuleb hoida andmeid, mis on
vajalikud jooksva töö tegemiseks ja ülejäänud andmed püütakse hoida alama taseme mälus.
Arvuti mälu jaguneb suvapöördusmäluks (RAM) ja jadapöördusmäluks. Viimane jaguneb magnet- ja optiliseks
mäluks. Magnetmälu jaguneb säilivaks mullmäluks, floppy-ks, kõvakettaks, magnetkettaks ja lindiks. Optilised
mälud on CD-ROM, CDR, CD-RW, DVD, magnetoptiline ja holograafiline. Suvapöördusmälu e. RAM jaguneb
pooljuhtmäluks ja magnetmäluks, mis jaguneb ferriitmäluks. Pooljuhtmälu jaguneb mittesäilivaks ja säilivaks
mäluks. Mittesäilivad mälud on staatiline RAM ja dünaamiline RAM, säilivad mälud on ROM, PROM,
EPROM, EEPROM ja FlashEPROM.
Suvapöördusmälu RAM 1) Pooljuhtmälu 1.1) mittesäiliv (volatile) 1.1.1) staatiline (Static RAM) 1.1.2)
dünaamiline (DRAM) 1.2) säiliv (nonvolatile): ROM, PROM, ERPM, EEPROM, FlashEPROM
2) Magnetmälu (magnetic) 2.1) säiliv (nonvolatile) 2.1.1) Ferriitmälu (Ferrite core)
Jadapöördusmälu 1) magnetmälu (magnetic) 1.1) säiliv(nonvolatile) 1.1.1) mullmälu (bubble) 1.1.2) pehme
ketas (Floppy disc) 1.1.3) kõvaketas (Hard disk) 1.1.4) Magnetketas 1.1.5) Lint (tape) 2) optiline mälu (optical)
2.1) säiliv: CD-ROM, CD-R, CD-RW, DVD
3. Analoog info, ADC, DAC ja helikaart.
Andmete muundamiseks analoogkujult digitaalkujule on meetodid ja seadmed, mis konverteerivad analoog
võnked diskreetsetenumbrite jadaks. Seda protsessi nimetatakse digitaliseerimiseks ning vastavat seadet
analoogdigitaalmuunduriks
ADC
(Analog
to
Digital
Converter).
Vastupidisel
korral
muundab
digitaalanaloogmuundur
DAC (Digital to AnalogConverter) diskreetsete numbrite jada pidevateks
analoogvõngeteks. Mõlemaid protsesse (ja seadmeid) kasutatakse üksikult või koos erinevates multimeedia
komponentides, näiteks:
●
arvuti graafikakaart (DAC)
●
helikaart (ADC ja DAC)
●
videosalvestuskaart (ADC ja parematel ka DAC)
●
CD plaadimängijad (DAC)
●
skanner (ADC)
●
MIDI süntesaator (ADC ja mõnedel ka DAC)
Helikaart on arvuti laienduskaart, mille ülesandeks on väljastada ja vastu võtta helisignaale, järgides
arvutiprogrammide juhiseid. Helisignaalide väljastamisel kõrvaklappidesse või kõlaritesse tekitatakse
õhuvõnked, mida inimese kõrv tajub helina. Helikaarte kasutatakse kaasajal näiteks arvutimängudele
helikomponendi lisamiseks või digitaalse muusika loomiseks. Helikaart võib olla emaplaadile integreeritud või
eraldi lisakaardina, mis ühendatakse tavaliselt emaplaadi PCI, PCI Express või (vanemate helikaartide puhul)
ISA siiniga. Igal helikaardil peab olema digitaal-analoogmuundur, mille abil muudetakse digitaalsed andmed
analoogsignaaliks. Samuti on enamikul helikaartidel olemas analoog-digitaalmuundur, mis muudab sissetuleva
helisignaali
diskreetsignaaliks,
võttes
väikeste
ajavahemike
(tuhandeid
kordi
sekundis)
tagant
analoog-helisignaalist hetkväärtusi (sample). Saadud hetkväärtused viiakse digitaalsele kujule ning salvestatakse
arvuti mällu, kus neid hiljem vajadusel muudetakse.
4. Pooljuhtmälud
Pooljuhtmälud põhinevad samal valmistamistehnoloogial, mis protsessorid. Pooljuhtmälud asendasid välja
varem kasutusel olnud kallid/ebatõhusad ferriitmälud. Pooljuhtmälusid iseloomustab kõrge tihedus, mida
mõõdetakse eelkõige bits per chip. Jagunevad staatilisteks, dünaamilisteks ja read-only (ROM).
1.
Staatiline pooljuht suvapöördusmälu (SRAM) – Toodetakse pannes mitmeid latche silikoon chipile. Väga
lühike access time, samas 4 korda kallim kui dünaamiline RAM. Mahutavuselt ka 4 korda madalam kui
dünaamiline RAM. Staatilise RAMi puhul salvestatakse andmed flip-flopidega, iga flip-flop koosneb 4st
transistorist. SRAMi eelis on see, et andmed on püsivad kuniks on voolupinge. DRAM puhul peab mälu aga
väga tihti refreshima.
Aadressi dekodeerimise ja lugemise/kirjutamise elektroonika on chipi pinnal. SRAM on ühenduses aadressi
siiniga (address bus) ja andmete siiniga (data bus), need mõlemad siinid on CPU siinid.
SRAMil on 3 selektorit, millega CPU (või North Bridge või mõni muu loogiline unit) kontrollib mälu tööd:
1. CS ehk chip select – kas see mälu võtab osa praegusest mälu tsüklist.
2. R/W ehk kas toimub kirjutamine või lugemine
3. OE ehk Output enable. Lubab andmeid lugeda mälust ja edastada need data bus-ile.
2.
Dünaamiline pooljuht suvapöördusmälu (DRAM) – kõige kompaktsem ja madalama tootmiskuluga
pooljuhtmälu. Mahutab rohkem kui SRAM ja tihti võtab ka vähem voolu. Salvestavad 1 biti informatsiooni ühte
transistor mälu pessa. Ehk 1 transistor=1 bit, SRAMi puhul 4transistori=1 bit, 4x effektiivsem on DRAM sellest
aspektist. Bit on salvestatud kui elektrilaeng. Chip hõlmas endas kõige vajalikku, et mingile mälupesale
ligipääseda, kirjutada sinna 1 v 0, lugeda mälupesa sisu lugemistsükli ajal. DRAMi puhul on tarvis kahte
kontrollsignaali, et aadressi kätte saada: rea aadress (row address strobe – RAS) ja veeru aadress (column
address strobe – CAS).
DRAMi nõrgad küljed:
1. Info on salvestatud elektrilaenguna, millel on omadus aja möödudes kaduda/leakida. Maksimum garanteeritud
aeg, mil info salvestud DRAMi on 16ms, sellepärast refreshitakse DRAMe vähemalt iga 16ms tagant, et info
kindlalt säiliks. Refreshida ei ole võimalik lugemis/kirjutamis-tsükli ajal.
2. kondensaatorite laadimine võib põhjustada pingekõikumisi vooluringis
3. vastuvõtlik alpha osakestele. Error-correcting code parandab seda, 5 check biti lisatakse 16 bitisele sõnale,
seeläbi on võimalik kõik 1 bitised errorid kohe ära parandada.
ROM-id:
ROMid mängisid suurt rolli soodsate PC-de levikus. Ajal mil kõvakettad olid veel kallid, kasutati ROMe
salvestamaks ntx Osi ja BASICu interpretaatorit. Tänapäeval kasutatakse ROMe bootstrappide salvestamiseks
(Osi laadimiseks kõvakettalt pm). Teine kasutusala on controllerina, ntx auto süüte süsteemile, vajalik ainult ühe
korra kirjutada see ja rohkem seda muuta pole vaja.
ROMe on väga lihtne CPU-ga sidustada, sest puudub WRITE interface.
1) Mask-programmed ROM. Nende sisu on tootmise käigus paika pandud ning on muutmatu. Andmed on
füüsilisel kujul chipile projekteeritud, (nö läbi maski, sellest ka nimi) mõtekas ainult suurte koguste puhul sest
maski tegemine on kallis.
2) PROM – programmable ROM – lastes piisavalt tugeva elektrilaengu läbi lingi on võimalik muuta transistori
olekut 0/1 vahel. Muutused on aga jäädavad, sest kui lingist on see laeng läbi läinud siis rohkem midagi muuta ei
saa. Kasutatakse kõige rohkem loogika elemendina. Lühike access time – 5-50ns. Ühe kordselt programmeeritav.
3) EPROM – erasable PROM. Andmed säilitatakse electrostaatilise laenguna, laeng võib püsida üle kümne
aastama, ilma ära leakimata. Sisuliselt on tegemist DRAMiga, mille refreshi aeg on 10 aastat. EPROMile on
võimalik kirjutada ja kustutada andmeid mitmeid kordi. UV valguse käes andmed aga kustuvad. Sobivad väikese
mahulistele projektidele ning arenduseks laborites sest neid saab ümberprogrammeerida. Halb külg on see, et
ümberprogrammeerimiseks peab chipi arvutist välja võtma, UV valguse kätte panema ning siis spetsiaalses
programmeris saab neid uuesti programmeerida alles.
4) Flash EPROM, saab ümberprogrammeerida elektrooniliselt. Keskmine eluiga uuematel on 10k r/w tsüklit.
5) EEPROM, electrically erasable PROM. Sarnane EPROMile, ei pea UV käes kustutama, saab elektriliselt.
Väiksema mahutavusega ja kallimad kui flash EPROMid. Access time 35ns, write cycle 5ms.
5. Konveier protsessoris ja mälus.
Protsessori erinevate osade efektiivseks kasutamiseks ja protsessori jõudluse tõstmiseks rakendatakse
kaasaegsetes protsessorites
käsukonveieri meetodit (Instruction Pipelining). Käsukonveieri põhimõte on
alustada järgmise käsu täitmise tsüklit kohe peale jooksva käsutsükli esimese osa lõpetamist ehk kui on jooksva
käsu lugemine mälust lõppenud ja algab selle dekodeerimine alustatakse kohe ka järgmise käsu mälust
lugemisega, jne. Käsukonveier toimib ideaalselt juhul kui käsud ei ole üksteisest sõltuvad ja eelmise käsu
tulemust ei ole vaja järgmise käsu täitmisel kasutada. Kui järgnevate käskude täitmisel on vaja eelmise käsu
tulemust tuleb tekitada käsukonveieril seisak või tühi operatsioon, et oodata ära vajalik eelmise käsu tulemus.
Käsukonveieril võib tekkida seisak ka juhul kui üks käsk nõuab keerukamat arvutust ja suunatakse täitmiseks
ujukoma seadmesse, kus käsu täitmine võib võtta aega palju protsessori takte. Selle olukorra vastu on
kaasaegsetes protsessorites mitu käsukonveierit, millest üks täidab näiteks aritmeetikakäske ja teine
ujukomakäske nii et protsessori töö ei seiskuks.
6. Virtuaal mälu.
Virtuaalmälu on kujutletav mälupiirkond, millest osa paikneb muutmälus ja osa kõvakettal. Virtuaalmälul on
oma mäluaadresside süsteem ning programmid kasutavad reaalsete mäluaadresside asemel neid virtuaalseid
aadresse käskude ja andmete salvestamiseks. Kui programmi tegelikult täidetakse, siis muudetakse virtuaalsed
aadressid reaalseteks mäluaadressideks.Virtuaalmälu eesmärgiks on suurendada mäluaadresside ruumi, mida
programm saab kasutada. Näiteks võib virtuaalmälus olla kaks korda rohkem aadresse kui põhimälus.
Virtuaalmälu kasutav programm ei saa küll kõike tööks vajalikku korraga põhimällu kirjutada, kuid arvuti
suudab siiski sellist programmi täita, kopeerides kettalt põhimällu ainult täitmise antud antud etapil vajalikke
programmiosi. Mida väiksem on põhimälu, seda sagedamini peab arvuti suhtlema kõvakettaga ja seda
aeglasemalt programm töötab. Seepärast ongi iga programmi puhul ära näidatud soovitatav põhimälu suurus, mis
tagab programmi täitmise normaalse kiirusega .Et hõlbustada kopeerimist virtuaalmälust reaalsesse mällu jaotab
opsüsteem virtuaalmälu kindlat arvu mäluaadresse sisaldavateks lehekülgedeks, mida hoitakse kettal seni, kuni
neid vaja läheb. Kui lehekülge on vaja, siis kopeerib opsüsteem selle kettalt põhimällu, muutes virtuaalaadressid
reaalseteks aadressideks. Virtuaalsete aadresside muutmist reaalseteks aadressideks nimetatakse mälujaotuseks ja
virtuaalsete lehekülgede kopeerimist põhimällu nimetatakse lehekülgede saalimiseks.
7. Erinevad siinid ja nende osa andmevahetuses (AB, DB, CB). vastatud 27nda küsimuse juures.
8. Andmevahetus mikroarvutis (erinevad siinid ja nende osa andmevahetuses, AB, DB, CB).
9. Optilised mäluseadmed
●
Põhimõte
Vanim mehanism andmete ladustamiseks on optiline tehnoloogia. Kutsutakse optiliseks mäluks, sest
read/write operatsioonid viiakse läbi laseri dioodide abiga, mis on optiline seade. Peale selle, et optiline
mälu suudab säilitada suurt kogust andmeid, on optilistel diskidel hea omadus - nad on pigem odavad,
immuunsed tolmule. Kuna andmete lugemine/kirjutamine toimub läbi laserdioodi, mis ei puutu diski, ei
saa see ka kunagi kriimustada “töö käigus”. Prinditud tekst on optiline mälu, sest tint muudab paberi
omadusi. Sama mehanism ladustab ka digitaalse info barcode’sse. Hiljuti on kaks eri tehnoloogiat
omavahel ühendatud, et luua kõrgtihedusega ladustamisseade. Laser loob väikese valguskiire, mis
illumineerib väikest täpikest, mis on loodud semiconductor fabrication tehnoloogia poolt. Need
täpikesed ladustavad infot nagu augud, mis oleks tehtud kaartidele või paberile.
●
mittekirjutatv CD (CD ROM)
●
kirjutatav CD (CD-R, CD-Recordable) - CD-R puhul kasutatakse tsüaniidi ja phthalocyanine( sinine
pulber ), mis on fotosentsitiivsed orgaanilised ainet, sarnanedes fotode puhul kasutatavatele ainetele. (
see põhjendab ka seda, miks Kodak kui ka Fuji tegelevad samuti CD tootmisega ) Protsess ise toimub
kuumutamisega, mille käigus reageerivad keemilised ained tänu laserile.
Sarnaneb ehituselt CD-ROM-ile, kuid põhimiku ja metallikihi vahel on valgustundlikust orgaanilisest
materjalist (tsüaniin või seda sisaldavad segud) andmekiht. Põhimikku on pressitud pidev spiraalvagu,
mille järgi kirjutav seade hiljem kirjutuslaserit positsioneerib (kirjutamiseks kasutatakse kõrge
intensiiivsusega laserkiirt). Kirjutamisel tekitatakse vagudevahelisele alale “lohke”. Need ei ole
tegelikult lohud, vaid materjali kerge sulatamisega mittepeegeldavaks muudetud piirkonnad, mida CD-
seadme laser peab lohkudeks.
Esmalt ilmudes oli CD vaid read-only seade, täna on aga CDsid millele saab ühekorra kirjutada , neid
nimetatakse CD-R
●
ümberkirjutatav CD (CD-RW, CD-ReWritable) - CD millele saab mitu korda andmeid kirjutada ning
kustutada, tegu on CD-RWga . Tuli kasutusele 1997.aastal, vajab spetsiifilisemat laserit. CD-RW
andmekihi pind koosneb erilistest keemilistest komponentidest, mis võivad oma olekut korduvalt muuta
ja säilitada, sõltuvalt temperatuurist. Materjali kuumutamisel ühe temperatuuriga ja seejärel jahutades,
aine kristalliseerub ning teise temperatuuriga kuumutades, võtab aine mittekristalliseerunud oleku. Kui
aine on kristalliseerunud, peegeldab ta rohkem valgust kui mittekristalliseerunult, seega saab
kristalliseerunud pinda kasutada kui põhipinda "land" ja mittekristalliseerunud kohta lohuna "pit".
Seega peab CD-RW seade kasutama korduvkirjutamisel kahte erinevat laserikiire võimsust.
●
DVD (Digital Versatile Disk, Digital Video Disk) seade - tuli kasutusse 1990ndatel aastatel, mille
minimaalne võimekus oli CD omast 6 korda suurem. DVD võimaldab pakkuda kõrgkvaliteedilist
digitaalset videot. DVDle andmete paigutamine sarnaneb suuresti videolindile andmete paigutusega.
Videolingi puhul ladustatakse ja nö. mängitakse tagasi informatsioon vastavalt füüsilisele paigutusele ja
järjestusele, mille moodustavad raua oksiidid. DVD ladustab ja mängib sarnaselt infot vastavalt “dot
pattern”ile materjalil. Väga täpne laser põletab DVD plaadile “täpid” - tegelikult väga väikesed lõhed/
pilud. Just nende väga väikeste täppide tõttu ongi võimalik DVDle ladustada nii palju infot.
●
holograafiline salvesti
10. Vahemälu ( Cache) organiseerimine (otsevastavusega, assotsiatiivne, kogum assotsiatiivne).
VAADAKE SEDA ILLUSTRATSIOONI KA, SUHT KERGE MÕISTA :
http://csillustrated.berkeley.edu/PDFs/handouts/cache-3-associativity-handout.pdf
Tänapäevaste vahemälusüsteemide kasutamise efektiivsus ulatub 90%-ni ehk üheksakümnel juhul sajast mälu
poole pöördumisest leiab protsessor otsitava informatsiooni kiirest vahemälust. Kui vajalikke andmeid
vahemälus ei leidu, järgneb lugemine aeglasemast põhimälust. Tänapäeval realiseeritakse vahemälu tihti kahes
osas. Väiksem ja kiirem vahemälu, mida nimetatakse ka L1-vahemäluks (Level 1 Cache), on reeglina protsessori
üheks struktuuriüksuseks. Suurem ja aeglasem L2-vahemälu võib olla nii protsessori koostisosa kui eraldiasuv
elektronlülitus. L1-vahemälude maht ulatub käesoleval ajal kuni 64 KB-ni, L2-vahemälud mahutavad kuni 1MB
informatsiooni.
Otsevastavusega - Direct-mapped cache
Üks lihtsamaid vahemälu organiseerimise viise on
otsevastavusega vahemälu. Info lugemine mälust toimub
gruppidena (Line). Mälu on jagatud segmentideks (Set). Vahemälus on igale grupile oma koht. Antud näites on
iga segment jagatud neljaks grupiks. Seega on vahemälus ruumi neljale grupile. Korraga saab vahemälus olla üks
0-s grupp, üks 1s grupp, üks 2-s grupp ja üks 3-s grupp. Seejuures võib iga grupp olla ükskõik millisest
segmendist. Korraga ei saa olla aga kahte 0-ndat gruppi, 1-st gruppi, 2-st gruppi ega 3-ndat gruppi erinevatest
segmentidest.
line – minimaalne vahemäluga vahetatav infohulk (4 – 16 baiti)
Selleks, et oleks võimalik kindlaks teha millisest segmendist mingi grupp on võetud, on vahemälus iga segmendi
juures vastava segmendi number. Adresseerimine on lihtne ja ka suhteliselt odav, kuid kui vaja on näiteks 0-nda
grupi infot erinevatest segmentidest, tuleb pidevalt teha ümberlaadimist.
Vahemälu kontroller võrdleb mälu poole pöördumisel, kas vastava grupi juures on soovitud segmendi number.
Kui on kokkulangemine (hit), siis pöördub protsessor vahemälu poole. Kui aga ei lange kokku, asendatakse
vastav grupp teisega. Vajadusel (kui protsessor on antud gruppi midagi kirjutanud) kopeeritakse asendatav grupp
ka põhimällu.
Võrdlusena võib tuua kohtadega määratletud parkla, kus näiteks maakonna koodijärgi on jaotatud üliõpilastele
parkimiskohad - probleemid võivad esineda kui nt. harjumaalt on väga palju inimesi ja nt võrust vähe ( ühes alati
üleküllastus ja teises mitte )
A direct-mapped cache scheme makes picking the slot very simple. It treats the slot as a large array, and
the index of the array is picked from bits of the address (which is why we need the number of slots to be a
power of 2---otherwise we can't select bits from the address)
The scheme can suffer from many addresses "colliding" to the same slot, thus causing the cache line to be
repeatedly evicted, even though there may be empty slots that aren't being used, or being used with less
frequency. A cache block can only go in one spot in the cache. It makes a cache block very easy to find, but
it‛s not very flexible about where to put the blocks.
Assotsiatiivne vahemälu ei ole jägatud segmentideks. Endiselt on olemas grupid. Nüüd võib vahemälus olla
ükstaskõik milline grupp mälust. Otsimine vahemälust toimub grupi numbri järgi. Grupid ei ole järjestatud ja
sellepärast kasutatakse assotsistiivmälu. Siin on vähem vaja põhimälu poole pöördumisi, kuid mälu ise on
kallim.
Otsevastavusega vahemälu korral oli alati teada, milline grupp tuleb asendada. Assotsitiivse vahemälu puhul
tuleb see otsustada kontrolleril. Kasutusel on terve rida vastandlikke strateegiaid. Assotsiatiivse vahemälu
uuendamise strateegiad:
●
LRU -Least Recently Used
●
LFU –Least Frequently Used
●
FIFO –First In First Out (kauem olnud andmed välja)
●
Random –juhuslik
Alati peab olema tagatud, et kui protsessor on infot vahemälus muutnud, siis jõuaks vastav muutus ka põhimällu.
Vahemälu peab olema põhimälu koopia. Kasutusel on kaks erinevat strateegiat. Andmete kirjutamine vahemälust
põhimällu:
●
Write-through, korraga muutused kirjutada vahemällu ja põhimälu (486)
●
Write-back, kirjutatakse põhimällu vahemälu grupi asendamisel.
Näide: Line on 16 baiti s.o. neli 32 bitist sõna. Mälu on 1 Mb ja seega koosneb 64 K linest. Cache koosneb
4096-st linest. Et laetud cachesse võib olla laetud ükstaskõik milline 64 K lineston tag 16 bitine.
Kogumassotsiatiivne vahemälu (Set associative-mapped cache):
Set associative-mapped cache –kompromiss direct-mapped ja täielikult associative cache vahel.
Vahemälu tasemed:
Level 1 cache - tavaliselt CPU korpuse sees. Käsu peidikmälu (Instruction Cache) umbes 16 Kb ja andmete
peidikmälu (Data Cache) umbes 64 Kb.
Level 2 cache - väljaspool CPU korpust. Tavaliselt segamini andmed ja käsud. Maht umbes 0,5 kuni 1 Mb.
11. Enamkasutatavaid kombinatsioonskeeme
●
välistav või (eXclusive-OR)
Välistavvõi on element, mida nimetatakse ka kaks-liitmiseks, välistavvõi tähistamiseks on 3 võimalust.
(plusmärk ring ümber / väiksemvõrdne / “või” millel kaar ees) Tõeväärtus tabeli põhjal on argumentide
väärtused jaotatud järgmiselt: kui argumendid on võrdsed on väärtus 0, erinevad siis 1.
Lõppväljundiks on tõene väärtus (1) vaid siis kui ÜKS sisenditest on 1, kui mõlemad sisendid on 0 ja 0
või 1 ja 1 , on vastuseks false (0). Meeldejätmiseks on lause „one or the other but not both„
●
multiplexor (Multiplexers)
Multipleksor – on digitaalne switch, mida kutsutakse ka andmeselektoriks või mux’iks on arvuti
riistvaraline seade, mis võtab vastu mitmeid sisendeid ja lubab vaid ühel toimida kui väljund. Mõned
multipleksorid teostavad nii multipelxingut kui ka demultipelxingut, mis on vastand tegevus
multipleksorile., sisaldades endas ühte sisendit ja mitut väljundit. Täidab kommutaatori ülesannet.On
põhimõtteliselt nagu lüliti, tegelikult sees sisendiväärtusega juhitakse väljundis olevaid transistore ,
korrigeerides väärtusi ja nivoosid, võimaldades rohkem elemente toita. Funktsionaalselt on nagu lüliti.
Sisendid jagunevad infosisenditeks ja juhtsisenditeks, kusjuures juhtsisendite arv määratleb ära
infosisendite arvu ning vastupidi. Vastavalt juhtsignaalile kommuteeritakse multipleksori väljundisse
signaal ühest infosisendist. Kommuteeritavate infosisendite arv võrdub 2^n, kus n on juhtsisendite arv.
●
summaator (Adder)
Summaator on kombinatsioonskeem, mis liidab arvkoode. Iga järk summeeritakse eraldi. Lisaks sisendite
väärtustele arvestatakse ka noorematest järkudest tulevaid
●
ALU ( Arithmetic-Logic Unit)
ALU – on digital circuit, mis on osa arvuti protsessorist (CPU), mille ülesandeks on teostada nii
aritmeetilisi kui ka loogilisi operatsioone. Alu kujutab endas elementi millel on operandid nt A ja B
ning resultaadid (väljundid). Kahe operandi vahel teatud hulk operatsioone ja saadakse 1 resultaat.
Operatsioonide valik toimub üldjuhul sisendi M (mode) põhjal, millal on kaks väärtust 1 või 0. Näiteks
1 on loogika 0 on aritmeetika ja et valida milline loogika op. Siis S sisendid, mille abil valitakse milline
loogika operatsioon.
Aritmeetilisteks teheteks on ADD, SUB, NEG jne. Loogilised aga AND OR NOT.
Aritmeetika-Loogikaseadme ülesandeks on mitmekohaliste kahendarvudega erinevate aritmeetiliste ja
loogiliste tehete tegemine. Tehe, mida teha, määratakse juhtsisenditega, operandid andmesisenditega.
Iga järgu jaoks arvutatakse väljundi väärtus iseseisvalt.
●
dekooder (Decoder)
teostavad kahendsüsteemi arvude ülekandmist kümnendsüsteemi. Dekoodri sisendisse antakse
kahendkood ja ühelt kümnendsüsteemi väljunditest tekib väljundsignaal. Dekoodreid kasutatakse
infoväljastamiseks digitaalseadmetest.
Fundamentaalselt on kõige õigem, et dekooder on circuit, mis muudab koodi mingiks teiseks
signaalidekogumiks. Milliseks kogumiks see saab, oleneb, milliste väärtustega on sisendid. Pildi põhjal:
●
koodimuundur (Code Converter)
kasutatakse arvutis tihti erinevaid koode ning ühelt koodilt teisele üleminekuks kasutatakse
koodimuundurit. Näiteks kahendkoodilt kahendkümnendkoodile. Näiteks üleminekute näited (joonisel
näha
,
saab
mõlemat
pidi
minna).
( ps! nende armetute joontega seal on määratud noorem ja vanem järk (vastavalt siis y0-y3 noorem ja y4-y7
vanem)
12. Klaviatuur
Klaviatuure on kahte liiki: QWERT - meie tavapärane klaviatuur, mis tegelikult loodi selleks, et vältida
trükimasina “pulkade” risti/sassi minekut. Samuti oli selline tähtede paigutus valitud ka vältimaks tähtede
segamini minekuks näiteks sõna “the” puhul, et vältida “ht” kombinatsiooni. Samas on qwerty anti-jamming
(ehk tähtede segamini minek) optimaalne vaid inglise keele puhuks.
Täna, kui klaviatuurid on elektroonilised ning puuduvad liikuvad osad, peale klahvide enda, pole QWERT
klaviatuur enam vajali, vastupidi oleks palju kiirem ning efektiivsem klaviatuur, kus tähed on kasutustihedusele
vastavalt läheduses teineteisele, vältimaks käte liigset liikumist. 1920.a. loodi Dvoraki klaviatuur, mille edu oli
10-15% suurem kui QWERTYl, kuid inimeste laiskus õppida uusi meetodeid on ärahoidnud Dvoraki tähelennu.
Samuti leidub lihtsaid ABCDE klaviatuure, kus tähed asetsevad tähestikulises järjekorras. Leidub ka chord
keyboard, mis meenutab morsekoodi sisestamist, sest sellel klaviatuuril on vaid mõned nupud. (kasulik
väikestesse kohtadesse, kus klaviatuur ei tohiks suurt ala enda alla võtta)
Klaviatuuride mõõtmete vähendamiseks on loodud special keyd (shift + .. =uus täht / crtl + .. = uus täht)
Info sisestamine arvutisse:
ASCII kood tähtedele - näiteks suur A - 01000001.
Tavaline klaviatuur koosneb kahest osast: tähed, mis on seadistatud tundma näpupinget ning encoder, mis
teisendab tähe kahendkoodiks arvutile.
Keyswitch, mis teeb kindlaks näpupinge “keystroke”, on mehaaniline seade. Tüüpiline keyswitch sisaldab endas
plungerit (väike pumbake) mille all on vedru , mida liigutatakse näpuga. Kui plunger surutakse näpu poolt alla,
lähevad kaks juhet kokku moodustades vooluringi, mille abil saadetakse signaal arvutisse. Olemas on ka
mitte-mehaanilisi switche: hall-effect,, elastromeric switch ja capacitive switch.
Teine põhiline osa klaviatuuris on keyboard encoder - klaviatuuri teisendaja - Vajalik seetõttu, et mingil viisil
tuleb keystroke (näpulöök) konvertida ISO/ASCII-koodi. Selleks kasutatakse kindla otstarbega mikrokiipi -
keyboard encoder. Jooniselt näeme, et selle mikrokiibi operatsioonid teostatakse vooluringi abil, mille puhul
valitakse switch-arrayst välja õige kahendkood. Jooniselt näeme, et 8 horisontaalset liini on ühendatud 8-bitise
input pordiga. Switch on asetatud igasse ristumiskohta horisontaal ja vertikaal line puhul (8 x 8 = 64 switchi) .
Kui klahvi vajutatakse, moodustub vertikaal ja horisontaal joone vahel ühendus, kui vajutust ei toimu, ei ole ka
ühtegi ühendust.
Iga vertikaalne line on ühendatud +5 V, seega on need HIGH levelil.
Piltide vaatamiseks venitage neid siis suuremaks ja väiksemaks, esimene pilt on siis illustreerimaks neid
horisontaalseid ja vertikaalseid linesid üksikult ning teisel pildil on see, milline on output ja input value
kui toimub vajutus.
13. Paralleelarvutid (SISD, SIMD, MIMD, MISD).
Paralleriseerimine tähendab seda, et mingist konkreetsest hetkest alates lahendatakse probleeme ja täidetakse
protsesse paralleelselt, pannes tööle n arv protsessorit korraga. Küsimusele, mida ja kui palju, üheselt vastata ei
saa kuna protsessori töökiiruse ja paralleriseerimise vastastiksõltuvuse tõttu ammendub ühe ülesande
lahendamisel paralleriseerimine kiiremini kui mõne teise ülesande puhul. Paralleelsust kasutatakse suurte
süsteemide korral.
Flynn’i klassifikatsiooni kohaselt jagunevad paralleelprotsessorid: SISD, SIMD, MIMD, MISD.
SISD – üks käsuvoog ja üks andmevoog
Kasutatakse juhul kui protsessori tööd on vaja kiirendada 5 kuni 10 korda. Käsuvoo täitmisel rakendatakse
ühtainust protsessorit, mille korral andmed salvestatakse mällu. Käske täidetakse etappidena. Käsutasandi
paralleelsusesse kuuluvad 1) konveier 2) superskalaarne arhitektuur (konveieril on mitu haru, mida täidetakse
paraleelselt).
SIMD – üks käsuvoog ja mitu andmevoogu
Käsutasandi paralleelsusesse kuuluvad 1) vektor protsessor ja 2) maatriks protsessor. Käsuvoo täitmisel
rakendatakse kõiki protsessoreid s.t sisse tuleb üks käsk, mida täidavad kõik protsessorid, kuid käske täidetakse
erinevate admetega.
1) Vektor protsessor
Vektor protsessori puhul on ALU-sid mitu, mis töötavad ühe ja sama operatsiooniga, kuid mis võtavad
andmed erinevatest kohtadest.
2) Maatriks protsessor
Kõik protsessorid täidavad ühte käsku, kuid erinevate andmetega. Maatrik protsessorit on raskem
programmeerida, kuid effektiivsem kui vektor protsessor.
MIMD – mitu käsuvoogu ja mitu andmevoogu
Kasutatakse juhul kui protsessori tööd on vaja kiirendada 50 – 100 või enam korda. MIMD jaguneb kaheks: 1)
multiprotsessor ja 2) multiarvuti.
1) Multiprotsessor
Multiprotsessoril eksisteerib üks põhimälu. Selle ühe aadressruumi peal töötab mitu erinevat protsessorit.
Multiprotsessori juures on arhitektuuriliselt mitu erinevat võimalust: 1) UMA -mälu poole pöördumine
protsessorite poolt toimub ühte moodi. Arhitektuuriliselt kasutatakse kas siiniarhitektuuri või on võimalik
võtmetega ühendada 2) NUMA - mitte ühesugune pöördumine mälu poole ehk mille korral on ühine
aadressruum, kuid erinevad protsessorid, mis võimaldavad pöörduda erinevalt. 3) COMA – sellise
arhitektuuri juures multiprotsessoril mälu füüsiliselt ei ole olemas. On olemas ühine aadressiruum ja iga
protsessori juurde kuulub vahemälu.
2) Multiarvuti
Multiarvutil on iga protsessori juures mälu ja nad kõik töötavad erineval aadressruumis ning neil puudub
ühine mäluruum. Multiarvutid jagunevad 1) MPP – meil on olemas protsessorid koos kõigi nende juurde
kuuluvaga. On olemas ka andmevahetusprotsessor. Ühendusprotsessorid kombineerivad põhiprotsessorite
tööd. Vajalik kiire ühendusliin. 2) NOW – võrreldes MPP-ga ei ole olemas kommunikatsiooniprotsessorit.
Võivad olla erinevalt realiseeritud - protsessorid suhtlevad omavahel ilma I/O seadmeteta või näiteks
töötavad erinevatel režiimidel.
MISD – mitu käsuvoogu ja üks andmevoog
Paralleelprotsessorit MISD praktikas ei kasutata. Tegemist on pigem abstraktse mudeliga. Meil on erinevad
käsud ja seejuures ühed andmed, mida protsessorid töötlevad.
14. Printerid ja värviline trükk
Maatriksprinter
(Nõelprinter, mille prindipea sisaldab üht või kaht rida nõelu, millest moodustatakse tähekujundeid ja siis
surutakse läbi tindiga immutatud lindi vastu paberit. Prindipea prindib rea algusest lõpuni, seejärel järgmise rea
jne. Mida rohkem on nõelu, seda suurem on printeri eraldusvõime. Printimiskiirused on 90-180 rida minutis.
Kõigi löökprinterite juures tekitatakse kujund paberile löögiga läbi värvilindi. Erinevus on selles, kuidas ja
millega teostatakse löök. Kõige levinum om maatriksprinter, kus vastu värvilinti, mille taga on paber, lüüakse
trüki peas olevate nõeltega. Kõiki nõelu saab juhtida solenoididega. Kui printeri juhtseade tekitab solenoidis
vooluimpulsi, lööb vastav nõel vastu värvilinti, mis tekitab omakorda enda taga olevale paberile punkti. Selline
printer võimaldab trükkida ka lihtsamat punktidest koosnevat graafikat.
Laserprinter
Laserprinteri töö põhineb seleentrumlil. Seleen on pooljuhtmaterjal, mis valguse toimel muutub juhiks. Trummel
laetakse kõrgepingega (1). Edasi mõjutatakse trumli pinda valgusega (2). Valguse allikaks on laserprinteris laser
ja koopiamasinas originaali peegeldus. Need kohad mis saavad rohkem valgust, muutuvad rohkem juhiks ja neilt
kaob ka laeng. Nüüd pöörleb trummel edasi ja läheneb toonrile (3). Need kohad, mis on rohkem laetud,
tõmbavad rohkem toonerit külge ja need, mis said rohkem valgust, on vähem laetud. Seega moodustub toonerist
trumlile kujund. Seejärel surutakse trummel vastu puhast paberit (4). Edasi kuumutatakse tooner paberile (5) ja
trummel puhastatakse toonerist (6).
Jugaprinter
Idee meenutab natuke maatriksprinerit, ainult siin ei lööda trüki peas olevate nõeltega värvilinti, vaid peas on
pihustid, millest pritsitakse paberile värvaine täppe. Pihusteid sisaldav trükipea liigub horisintaalselt paberi
läheduses. Vertikaalne liikumine saadakse paberi kerimisega. Neist värvaine täppidest moodustatakse kujund.
Pihustamiseks on kaks võimalust:
Piesokristalli pihusti mõjutatakse vooluga mille tulemusena ta muudab oma kuju ja paiskab tindi täpi pihustist
väja.
Trükipeasa on takisti mis voolu impulsi toimel kiiresti kuumeneb ja paiskab paisunud tindi tilga pihustist
paberile.Viimasel meetodil on see hea omadus, et kuumenenud tint kuivab kiiremini.
Värviprinterid
Priterites ei ole kasutatav RGB süsteem, mis monitoride puhul võimaldas värve liita. Põhjuseks on see, et paber
ei ole aktiivne valgusallikas nagu kuvari elektronkiire toru ja taust on valge mitte must. Valge värv teatavast
peegeldav kõiki värvusi. Kasutatkse kolme värvi: CYAN mis peegeldab kõiki värvusi peale punase. MAGNETA
mis peegeldab kõiki värvusi peale rohelise. YELLOW mis peegeldab kõiki värvusi peale sinise. Kõigi nende
kolme värvi summa peaks andma musta. Eraldi on lisatud ka must värv –BLACK. Kokku saadaksegi
värvisüsteem CMYK mida printerites kasutatakse.
15. Magnetmäluseadmed
Magnetmäluseadmed
Magnetketas koosneb ühest või mitmest alumiiniumtaldrikust, mis on kaetud magnetiseeritava kattega. Ketta
pea, sisaldades induktsioonipooli hõljub pinna kohal õhupadja peal. Kui positiivne või negatiivne vool läheb läbi
pea, magnetiseerib see pinna otse pea all, reastades magnetilised osakesed otsaga vasakule või paremale poole
vastavalt ketta voolu polaarsusele. Kui pea läheb üle magnetiseeritud ala, indutseeritakse peas positiivne või
negatiivne vool, tehes võimalikuks eelnevalt salvestatud bittide lugemine.
Kõvaketas (HDD)
Kõvaketta pöörlemiskiirus näitab kui kiiresti kõvaketta plaadid pöörlevad. Kiirused 3600, 4500, 5400, 7200,
10000 RPM.
Ülekande kiirus. Sisemine ülekande kiirus (Internal transfer rate) - kui kiiresti suudab lugemispea saata infot
kontrollerile.
Burst ülekandekiirus (Burst transfer rate) näitab liidese ülekande kiirust.
Pidev ülekande kiirus (Sustained transfer rate) näitab kui kiiresti liigub info arvuti ja draivide vahel teatud
kindala aja jooksul keskmisel.
Otsimisaeg (seek time) näitab kaua võtab lugeja peal aega, et jõuda õigele rajale (tavaliselt 10 ja 15
millisekundit). Varjatud otsimisaeg (latency) näitab, kaua võtab kõvakettal aeg, et pöörata plaate nii, et pea
jõuakse mööda rada liikudes õige punktini, kuhu info on salvestatud.
Põhimõtteliselt näeb kõvaketas seest välja nagu pisike grammofon, ülestikku asetatud plaatide ja nende vahel
liikuvate lugemis/kirjutamispeadega. Mida suurema mahutavusega kõvaketas, seda rohkem plaate on. Erinevalt
flopikettast, mis on kergesti vahetatav ja transporditav, on kõvaketas jäigalt seotud kettaseadmega. Ta on
paigutatud hermeetiliselt suletud, tolmukindlasse korpusesse. Metallkest on suletud hermeetiliselt. Kesta sisemus
peab olema võimalikult tolmuvaba, võimaldamaks parimat täpsust ketta lugemis -ja kirjutuspeade sihtimisel
ketta pinna ulatuses. Tänapeva kõvaketta kettakontroller on sisse ehitatud. See kontrollib lugemis -ja
kirjutamispeade liikumist, andmete lugemist ja salvestamist. Andmed paiknevad ketta pinnal väikeste
magneetiliselt polariseeritud väljadena, mida arvuti loeb kui 0 ja 1 jada. Telg paneb kettad pöörlema. Mida
suurem on ketta pöörlemissagedus, seda kiiremini saab andmeid kettalt lugeda. Kettad ise on kas metallist või
klaasist ning kaetud õhukese (kuni 0,000001 mm) magneetuva kihiga.
Floppy Disk
Pehme ketas ehk floppy disk. Esimesed floppyd olid painduvad ja suhteliselt pehmest materjalist. Erinevalt
kõvakettast, kus pea hõljub ketta kohal õhupadjal, on floppyl pea surutud vastu ketast. Selle tulemusel nii pea kui
ka ketas kulub kiiremini. Vastupidamise suurendamisel peatatakse pöörlemine, kui kettalt ei loeta ega kirjutata.
Striimer - Tape Drive
Striimer on kassettmagnetofoni taoline seade suurte infohulkade säilitamiseks ja ülekandmiseks ühest arvutist
teise. Striimer kasutab lindikassette, mis on sarnased laiatarbe kassettmagnetofonide kassettidele, kuid lint on
kvaliteetsem. Ühele kassetile mahub 60300 MB informatsiooni. Striimerist on abi, kui on soovi säilitada oma
hinnalisemat tarkvara ja andmeid võimalike rikete eest koopiatena või kui on soovi kogu kõvaketta sisu kanda
üle teise arvutisse. Striimeri mõõtmed on samad, mis disketi- või kõvakettaseadmel. Võrreldes teiste
andmekandjatega on lindiseadmete eelis odavus. Puuduseks aeglus, andmeid ei saa lugeda suvalisest kohast
suvalisel ajahetkel nagu ketasseadmetel, vaid peab ootama, kuni lint on jõudnud ennast kerida soovitud kohani.
HiFD - High Floppy Disk
HiFD on Sony disketiseade, mis suudab lugeda 200 MB- seid 3‰" diskette. Jaz seadme maksimaalne pidev
andmeedastuskiirus on 6,73 MB/s; pöörlemiskiirus 5400 RPM; ketta vormindamise aeg 30 min; talub kukkumist
3 meetri kõrguselt; andmed säilivad 10 aastat; keskmine tõrketa tööaeg 250 000 tundi.
Magnetoptilised kettad
Andmete säilitamine MO-ketastel on mugav. Kettalt lugemine on praktiliselt sama kiire kui kõvaketta puhul,
kirjutamine umbes kolm-neli korda aeglasem. MO-kettal on lihtne viia andmeid ühest kohast teise. Kui
väiksemate andmehulkade viimiseks ühest arvutist teise kasutatakse tavaliselt disketti, siis suuremahuliste
andmete jaoks jäävad disketid väikseks. Magnetoptilised kettad on oma olemuselt töökindlamad tavalistest
kettaseadmetest. MO-kettad taluvad palju paremini magnetvälju kui tavalised magnetkandjad. Magnetoptilisi
(MO) seadmeid on väga erineva mahutavusega. Toodetakse nii 3,5 kui ka 5 … seadmeid. 3,5" kettaid on
erinevate mahutavustega nt. 128 MB, 230 MB, 650 MB. Kõik senised realisatsioonid kirjutavad ketta ühele
küljele. Magnetoptilisi kettaid tehakse ka 5,25 tollistena ning need seadmed võimaldavad suuremaid
salvestusmahtusid ja reeglina ka suuremaid kiirusi. Sellised seadmed kasutavad juba ka kahepoolset kirjutamist.
Konstantse nurkkiirusega kettad
Konstantse nurkkiirusega kettad. Pöörlemiskiirus on konstantne ja igal rajal on ühesugune arv sektoreid. Seega
paiknevad bitid välimisel rajal suhteliselt väikese tihedusega ja palju ruumi läheb kaotsi. Nii töötab enamik
magnetkettaid. Antud meetodit kasutavad tavaliselt ka alates 16-kordsetest CD-ROM-id.
Konstantse joonkiirusega kettad
Konstantse joonkiirusega ketastel hoitakse konstantsena parajasti loetava raja joonkiirus. Iga rajavahetuse järel
tuleb reguleerida ketta pöörlemiskiirust ning see viib andmeedastuskiiruse alla. Salvestustihedus on kõigil
radadel sama ja andmeedastuskiirus konstantne. Seda meetodit kasutatakse laserketaste puhul.
Konstantse nurkkiirusega tsoonkettad
Konstantse nurkkiirusega tsoonkettad. Need kettad paistavad silma muutuva andmeedastuskiirusega: välimiselt
rajalt loevad nad pea kaks korda kiiremini kui sisemiselt. Ketas on jagatud tsoonideks ja üks rada sisaldab igas
tsoonis erineva arvu sektoreid. Kuna ketta pöörlemiskiirust hoitakse konstantsena, siis liigub välimise raja
salvestis lugemispeast lihtsalt kiiremini mööda.
16. Mikroskeemide valmistamise tehnoloogiad
Bipolaarsed tehnoloogiad
Bipolaarne transistor koosneb kolmest pooljuhi kihist: n-tüüpi, p-tüüpi ja np-tüüpi pooljuht. Analoogne
väljatransistoriga, kuid juhitakse vooluga ja mitte väljaga; sisend tarbib rohkem voolu; lisaks kollektor, emitter ja
baas.
Diood loogika
Dioode on kahte tüüpi: n-pooljuht ja p-pooljuht. Aseskeemiks on lüliti, mille kontaktid on suletud. Ei ole nii hea
lüliti kui väljatransistoril. Peamiseks probleemiks on see, et väljundi hargnemistegur on väike (teisi elemente
saab külge ühendada vähe).
Diood transistor loogika
DTL koosneb kolmest osast: 1) kombinaator, mis realiseerib loogikafunktsiooni 2) taastaja, mis taastab õiged
nivood (transistorid) 3) puhver väljundi hargnemisteguri tõstmiseks. Dioodidel on takistus, seetõttu tekib
väljundisse igal juhul mingi pinge (U=IR), mille tõttu teda ei kasutata.
Transistor transistor loogika
TTL puhul on tegemist sarnaselt DTL-ga, kuid dioodide asemel kasutatakse transistore. Tarbib vähem voolu ja
on kiirem.
Schotky TTL
TTL-is kasutatakse Šotki dioodi. Transistori ette pannakse diood, et transistor ei küllastuks, kuna küllastunud
transistori sulgemine võtab kauem aega ning järelikult on TTL- st kiirem.
Integraal indektsioon loogika
IIL-s tehakse ühele kristallile nii np- kui ka npn-tüüpi transistore; saavutatakse mõnevõrra parem kiirus ja
pakkimisomadused on paremad.
Emittersidestuses loogika
ECL - bipolaartransistoridel põhinev; on väga kiire; lisaks on sellel negatiivne loogika, kus loogilise nulli nivoo
on kõrgem kui loogilise ühe nivoo.
Unipolaarsed tehnoloogiad
n-channel MOS
NMOS n-juhtivusega MOS- loogika. Väljatransistor.
p-channel MOS
PMOS p-juhtivusega MOS loogika. Väljatransistor. Unipolaarne. Kõrge nivoo - avatud kontaktidega lüliti, madal
nivoo - suletud kontaktidega lüliti
Complementary MOS
CMOS-is pannakse kristallidele mõlemaid tehnoloogiatel valmistatuid, nii n- kui ka p-tüüpi transistore. Kui sisse
tuleb 0, muutub 1.ks, kui 1, siis 0-ks. CMOS on laialt levinud ja kasutatakse arvutiskeemides. Aeglasemad kui
bipolaarsed, kuid võimaldab paremat pakkimistihedust ning energitarve on väiksem.
17. Erineva pöördumisviisidega mälud: LIFO, FIFO, assotsiatiivmälu ja kahe pordiga mälu.
LIFO ehk pinumälu
Pinumällu kirjutamisel näitab pinumälu osuti (Stack Pointer – SP või Top Of Stack -TOS) alati viimasele sinna
kirjutatud sõnale. Esimesena saab seega lugeda ainult sinna viimasena salvestatud sõna. Sõna, mis kirjutati mällu
esimesena, loetakse välja viimasena. Realiseeritakse kahel viisil: 1) esiteks protsessori põhimälu baasil -
pinumälule eraldatakse teatud mälu piirkond ja SP on salvestatud spetsiaalsesse registrisse. Kui toimub
kirjutamine, siis modifitseeritakse SP väärtust, et see näitaks esimesele vabale pesale ja siis salvetatakse sõna.
Lugemisel vastupidi – alguses loetakse sõna ja seejärel modifitseeritakse SP, et ta näitaks järgmisele varem
salvestatud sõnale pinumälus. 2) teiseks riistvaraline pinumälu on põhimõtteliselt rida ühise juhtimisega
nihkeregistreid, kus infot saab nihutada sünkroonselt. Igale sõna bitile vastab oma nihkeregister. Kiiremat
riistvaralist realisatsiooni kasutatakse spetsiaalsetes kohtades, üldotstarbelistes protsessorites on tavaliset
põhimälul põhinev realisatsioon. Pinumälu kasutatakse alamprogrammide poole pöördumisel tagasipöörde
aadressi salvestamiseks, samuti katkestuste korral.
FIFO ehk puhvermälu
FIFO puhvermälu tööpõhimõte on First In First Out. Sõna, mis kirjutati esimesena mällu, loetakse esimesena
välja. Kasutatakse näiteks erineva andmeedastuskiirusega seadmete vahel info puhverdamiseks. Assotsiatiiv
(Content Adressable Mempory, Associative Memory) CAM-s on võimalik otsida infot sõna sisu järgi, aga mitte
aadressi järgi ja saada teada, kas teine osa sõnast või tema aadress. Kasutatakse näiteks vahemäludes (Cache).
Ehk otsime teatud koodi järgi. Kui me kogu aeg teeks seda järjestikkujul, siis oleks mälu ülimalt aeglane. Seega
peab otsimine toimuna paralleelselt. Olemas on andmeregister ja maskiregister. See eraldab need järgud, mille
järgi toimub otsimine.
Kahe pordiga Dual port RAM
Kahe pordiga mälud võimaldavad samaaegselt ühe aadressi järgi kirjutada ja teise aadressi järgi lugeda. Näiteks
videomälu, kus protsessori poolelt kirjutatakse kujutise infot mällu ja teiselt poolt toimub kujutise laotamine
ekraanile.
18. RISC ja SISC protsessorid, mikroprogrammCISC protsessor
CISC - (Complex Instruction Set Computer) selline protsessor võib ühe instruktsiooni raames teha mitu erinevat
mikrooperatsiooni. CISC protsessorile kirjutatud programmid on mahult väiksemad ning ühtlasi on neid
masinkoodis ka suhteliselt lihtne kirjutada.
RISC protsessor
RISC - (Reduced Instruction Set Computer, hakkas levima 80ndatest.) selline protsessor, mis toimetab üksnes
võimalikult lihtsate mikrooperatsioonidega. RISC protsessorile kirjutatud programmid vajavad rohkem mälu,
sest kõik mikrooperatsioonid tuleb eraldi kirja panna, ühtlasi on selliseid programme masinkoodis ka raskem
kirjutada kui CISC-le. Lihtsamaid käske on võimalik täita kiiremini, kuid neid käske kulub mingi programmi
juures rohkem. Kui CISC täidab käsu näiteks 10 ajaühikuga, siis RISC näiteks 1 ajaühikuga. Kui sama tegevuse
teostamiseks kulub RISC protsessoris näiteks 5 korda rohkem käske, on RISC on ikkagi kaks korda. Suurema
hulga käskude lugemine eeldab suuremat arvu mälu poole pöördumisi, mis kulutavad aega.
Mikroprogramm
Praegusel ajal kasutatakse hübriidstruktuure, mis ei ole RISC ega CISC. Näites RISC tuuma ümber on ehitatud
CISC kest. Käsu täitmisel on oluline, et seda teostatakse riistvaras. Näiteks kui ALU ei oska riistvaras korrutada,
siis võib teha keeruka mikroprogrammi osa, mis realiseerib selle liitmise ja nihke kaudu. RISC ideoloogia sellist
keerukat ja aeglast mikroprogrammi ei luba. Korrutamine teostatakse riistvaras ALU-s või ta üldse puudub.
Mikroprogrammis on olemas üldosa koos käsukoodi lugemise ja käsuloenduri modifitseerimisega ning
operantide lugemine ja resultaadi salvestamine, kuid ta puudub täitmisel. RISC protsessorites on palju tegeldud
käskude täitmise efektiivsuse tõstmisega. Selle protsessori projekteerimise põhimõtted: suhetliselt vähe käske
(soov. alla 100) ja vältida tuleb keerulisi käske; dekodeerimise kiirendamiseks vähe erinevaid käsuformaate
(soov. 1 või 2); vähe adresseerimise viise (soov. 1 või 2); maksimaalne käskude täitmise kiirus viib
paralleelsuseni; käsud tuleb täita ühe taktiga otse riistvaras (täidetakse ALU-s); mälu poole pöörduvad ainult
LOAD ja STORE käsud; jäiga loogikaga (hardwired) juhtautomaat, mis võib tehnoloogia arenedes asenduda
mikroprogrammeeritavaga; võimas registermälu (32st 132-ni), et võimalikult palju oleks registerregister tüüpi
käske ja vähe pöördumisi mälu poole; efektiivne andmevahetus alamprogrammidega; efektiivne käskude
järjekorra juhtimine (siirded ja alamprogrammid).
19. Arvutite veakindlus ja veakindlad koodid
Riistvara testimine võtab riistvara loomisest ligi 50% koguajast.
Vigade klassid
Püsivad rikked:
1.Ühenduste rikked;
2.Purunenud komponendid
3.Tootmisel tekkivad rikked
4.Disaini vead.
Mittepüsivad rikked:
1.Keskond (temp. Niiskus,rõhk ...)
2.Vibratsioon
3.Toide
4.El. magn väli, staatiline elekter, maandus
5.Halvad ühendused
6.Kriitilised ajad(timing)
7.Takistuse ja mahtuvuse muutused
8.Müra
9.Vananemine.
.
Veakindlad koodid
(RAID-de loengust)
Jagunevad kaheks: vigu avastavad koodid ja vigu parandavad koodid. Vigu avastavad koodid vaatavad ühte
järgu, kas on viga ja vigu parandavad koodid taastavad ühe järku. Kui viga on kahes järgus siis ei parandatata,
ega avastata. Vigu parandavad koodid on kallimad, seepärast ei olegi kõik ainult vigu parandavad vaid mõnes
kohas kasutatakse ka vigu avastavaid koode.
(Clements kirjutas lk 157)
Kuidas? Semalt tuleb selgeks teha kaks mõistet: source code ja code word. Source code on siia algkood, mis ei
ole töödeldud, võtame näiteks 10110. Code word on siis algkood mis on töödeldud millekski, näiteks iga bit on
kolmekordistatud. Need mingil määral üleliigsed bitid ongi kontrollbitid. Eelmine algkood oleks töödeldud
kujul siis 111000111111000. Kui nüüd mõni 1 peaks muutuma 0-iks siis saab seda avastada ja parandada. Isegi
mitu võib nii muutuda, ja saab ikka parandada. Siis kui ühes kolmikus peaks kaks tükki muutuma siis viga ei
pruugi avastada, kuid see on ka väga harv juhus, et nii tekib.
Üks väga lihtne veaavastamise viis on see, et pannakse üks viga avastav bit. Oletame, et on 8bit-iline sõna
01101001. Võtame, et meil on paaris arvuline süsteem ja vaatame mitu ühte seal on. Neid on viis, ehk siis
paaritu arv ja ette läheb 0. Kui nüüd üks arv peaks olema seal midagi muud. Saab kontrollist aru, et midagi on
muutnud ning tuvastatakse viga.
Hamming-i koodiga veaparandus. Oletame, et meil on kaks sõna mis on õiged 111 ja 000. Kui väärtus on 110
siis on see ilmselgelt vale, aga selle saab mudeli alusel ära parandada.
Mudelist on näha, et kui minna ühest õigest väärtusest ühe pikkuse võrra edasi on järgmine väärtus mis
eelmisele väga sarnaneb. See tähendab ka, et ühe pikkuse raadiuses on väärtused parandatavad.
20. Enamkasutatavad järjestiskeemid.
http://www.pld.ttu.ee/~teet/digiloogika_w.pdf
Järjestikskeemidel (inglise keeles Sequential Circuits) on mälu omadus. See tähendab seda, et väljud ei sõltu
alati sisenditest, mis on antud ajahetkel vaid ka sisenditest, mis olid enne seda.
1. Triger ( Kasutusel ka mõisted Latch ja Flip-flop) - Elementaarne mäluelemnet, mis võimaldab salvestada
koguse üks bit.
●
SR triger
SR tuleb sõnadest “SET” ja “RESET”.
SR trigeri tabelis tähendab indeks t-1, et väljunids säilib eelmisel ajahetkel seal olnud väärtus.
Kui S ja R on mõlemad 1, on otseväljund ja inversioonväljund ühesuguse väärtusega.Kuivõrd muutuja ja tema
eitus ei saa ollavõrdsed loetakse seda kombinatsioonikeelatuks. Seepärast on ka tõeväärtus tabelis rist selle koha
peal.
●
Trigerite sünkroniseerimine
Asünkroonne SR triger
Asünkroonsel trigeril puudub spetsiaalne sisend, millega saaks määrata millal toimub trigeril ümberlülitumine.
Kui muutuvad sisendite väärtused, muutub ka olek.
Sünkroonne SR triger
Seal on eraldi sisend selleks, millal triger lülitub ümber(joonisel sisend C). Kui ümberlülitussisend ei ole
aktiivne siis ümberlülitust ei toimu ja triger säilitab enda vana väärtuse.
Probleem tagasisidega. Loogika skeemides võb esineda olukordi, kus trigeri uus olek sõltub tema eelmisest
olekust. Seda nimetatakse tagasisideks. Nüüd tekib probleem sünkroniseerimisega. Kui sünkro sisend on aktiivne
ja triger avatud, siis võib ta lülituda ümber mitu korda, sest väljundi uus väärtus jõuab tagasiside kaudu
sisendisse ja põhjustab uue ümber- lülitumise.
●
D-trigerid ehk ptentsiaaliga sünkroniseeritav triger
See triger on avatud seni kuni juhivsisend C on 1 ja suletud siis kui see on 0. Seega ümberlülitumise aja määrav
C sisendi pitentsiaal. D triger võib olla nii ühe kui ka kahetaktiline.
Frondiga sünkroniseeritav D-triger(inglise keeles Edge trigered d flip-flop)
Fondiga sünkroniseeritav triger, lülitub ümber, kui C sisendi väärtus muutub 0-st 1-ks ja või 1-st 0-i. Lülitumine
toimub ainult frondi ajal, muidu triger säilitab oma oleku sõltumata sisenid väärtusest.
●
MS-trigerid ehk kahe takitga trigerid
Koosneb kahest osast Master(tõlkes siis pea või esimne) ja Slave(teine). Suhteliselt sarname sünkroonnse
SR-iga. Kui juhtiv sisend(antud juhul C) on 1 siis on esimene avatud, aga lõppväljundisse ei jõua uut väärtust,
sest teine pool on ikka 0. Kui nüüd juhtiv sisend muutub 0-iks siis esimese trigeri väärtus ei muutu, aga
väljundisse tuleb see mis oli enne, sest teine on nüüd avatud.
MS-trigeri joonis
●
JK-trigerid
Sarnane SR trigeriga. Erineb selle poolest, et triger lülitub eelneva oleku vastupidisesse väärtusesse kui J ja K
sisenditeväärtused on võrdsed.
Frondiga sünkroniseeritav JK trigerIdeoloogia on sama mis frodniga sünkroniseeritaval D-trigeril, kuid JK trigeriga.
●
T - Trigerid
Teise nimega loendustriger.
●
Asünkroonsete sisenditega trigerid
S ja R sisendid lülitavad trigeri ümber sõltumata sisendist C. Neil on kõrgem prioriteet. J, K ning C sisendid
määravad trigeri oleku ainult siis kui R ja S on pasiivsed. Näites on tagaforondiga JK triger, aga sünkroonseid
sisendeid võib olla ka D, T ja SR trigeritel.
Kohata võib ka madal aktiivsete asünkroonsete asetussisenditega trigereid. Nüüd on tabelis S ja R väärtused
astupidised. Leidub ka selliseid trigereid, millel on ainult kas asünkroonne R või S sisend.
●
Registrid
Register on grupp ühise juhitmisega trigeried. Minimaalselt tähendab see ühist sünkroniseerimist. Peale
kahendsõna säilitamise võib registris toimuda ka nihe, mitme infoallika valik jne.
●
Asetusega register
Registril võib olla asetuse (nullimise) sisend, millega saab kõigile järkudele anda algväärtuse.
●
Register, mis võimaldab valida kahe info allika vahel
Täiendavad funtsionina võib registril ollaka valik kahe sisendi komplekti vahel, millet kirjutatakse uus väärtus
registrisse. Näiteks toimub valik juhtsisendi W abil.
Register kahe sisendi vahel
●
Nihkeregister
Nihkeregister võmaldab kirjutada q i biti kohale q i+1biti väärtus (nihe paremale) või qi biti kohale q i-1biti
väärtus (nihe vasakule). Nihkeregistrit, mis võimaldab nihet mõlemas suunas nimetatakse reversiivseks. Nihet
kasutatakse näiteks info teisendamisel paralleelkujult järjestik kujule ja vastupidi. Matemaatika poolelt tähendab
nihe paremale arvu jagamist arvusüsteemi alusega (kahensüsteemis kahega) ja nihe vasakule vastavalt
korrutamist.
Mõningates rakendustes kasutatakse ka ringnihet, kus äärmise biti väärtus ei lähe kaduma, vaid nihkub teisest
otsast registrisse sisse. Järjestiknihe võib olla paremale või ka vasakule. Näitena on nihe paremale.
Nihkeregistreid võb koostada kõgi trigeri tüüpide baasil. Näitena on toodud paremale nihutav register SR
trigerite baasil. Nihkeregistritel võib olla ka asetus sisend (kas nullimiseks või mõne muu algkoodi
salvestamiseks). Nullimise sisend (Reset, Clear) saadakse tavaliselt trigerite asünkroonsete R sisendite kokku
ühendamisega.
●
Reversiivsed nihkeregistrid
Näitena on toodud reversiivne ( mõlemas suunas nihutav) nihkeregister D trigerite baasil. Juhtsisend M määrab
nihke suuna ( M=1 nihe paremale ja M=0 nihe vasakule). Loomulikult saab kasutada baasina ka teist tüüpi
trigereid.
●
Loendurid
Loendur vastab impulsside jadale spetsiaalses loendus-sisendis kindla väljundkombinatsioonide (olekute)
jada läbimisega. Erandkorras on väljundis järjestikused kahendarvud (kahend loendur). Üldjuhul ei pruugi
väljundis olla järjestikused kahendarvud, vaid need võivad olla suvalised kahenkoodid.
●
Paralleellaadimisetaalgasetusega loendur
Tihti on loenduritel olemas algasetuse võimalus, sest iga uus väljundi väärtus sõltub eelmisest ja kui algolek ei
ole teada, siis ei ole võimalik määrata ka hilisemaid väljundi väärtusi. Saadakse asetuse (nullimise) sisend
trigerite asünkroonsete R sisendite ühendamisega.
●
Paralleel laadimisega
Võib kohata ka registreid, millel on olemas paralleelne algväärtuse laadimise võimalus. Erinevalt nullimisest
võib siin algväärtuseks olla suvaline kahendkood.
●
Sünkroonsed kahendloendurid
Järjestikülekandega sünkroonne kahendloendur mooduliga 16, mis loendab koodide kasvavas suunas. Täiendav
sisend E lubab loendamist. Iga triger lülitub ümber kui on täidetud kaks tingimust: loendamine on lubatud (E=1)
ja kõigi nooremate järkude väärtused on 1-d. Järjestikune ülekanne tähendab, et vanima järgu trigeri T sisendi
väärtus levib läbi kõikide nooremate järkude.
Paralleelülekandega sünkroonne kahendloendur mooduliga 16 mis loendab koodide kasvavas suunas. Siin
arvutatakse kõigile trigeritele sisendite väärtused eraldi ja nad ei läbi kõiki nooremaid järke. Oluliselt kiirem
suure järgulisuse korral, kuid nõuab palju loogikaelemente (hind, kristalli pind).
Sünkroonsed kahendloendurid
●
Järjestikülekandega kahendloendur mooduliga 16, mis loendab koodide kahanevas suunas
Loenduri loogikaskeemis on ülekande juures kasutatud trigerite inverteeritud väljundeid, uuele olekule üleminek
toimub kui on lubatud loendamine (E=1) ja kõigi nooremate järkude väärtused on 0-d (eitused on 1-d).
●
Asünkroonsed kahendloendurid
Asünkroonsus tähendab seda, et ülemineku aeg ühest olekust teiseei ole konstatne. Näiteks aeg üleminekult
000-lt 001-le ei toimu sama kiirusega kui üleminek 011-lt 100-le. Loogikaskeemis kasutatakse asjaolu, et iga järk
lülitub eelmisega vastupidiseks siis, kui tema noorem naaber muutub 1-st 0-ks (tagafront). Nii tekibki olukord,
kus tagafront levib eri üleminekute korral läbi erineva arvu nooremate järkude trigerite. Kasutatkse sagedus
jagajatena, indikaatorites jne. Ei sobi andmetöötlusse, sest viide hakkab sõltuma andmetest (koodist loenduris).
●
Ajadiagrammid
Ajadiagrammidelt on näha kuidas sünkroonses loenduris toimub üleminek püsiva viitega, asünkroonses aga on
viide erinevate üleminekute korral erinev.
●
Kahend-kümnend loendur
Loogikaskeem on saadud eelnevat modifitseerides. Nimelt tuntakseära kood 1001, mis on viimane ja mille järel
tuleb jällegi esimene kood 000. Kasutades “9” detektori väljundit on modifitseeritud ülekande ahelat nii, et ei
realiseeruks üleminek 1010-le. See tähendab, et tuleb 9 korral sundida trigerit q3 lülituma ümber (0-ks) ja
takistada q2-te lülitumast 1-ks. Kõigi teiste üleminekute korral töötab ta nagu eelnev mooduliga 16
kahendloendur.
Kasutades selliseid ühe kümnendjärgu kahendloendureid võime neid kokkuühendades saada loenduri suvalise
järgulisusega kümnend arvude loendamiseks.Iga kümnend järk (dekaad) lülitub ümber järgmisesse olekusse kui
loendamineon lubatud (E=1) ja nooremate dekaadide väärtused on 9-d.
●
Suvalise seaduspärasusega loendur
Loenduri väljundi kombinatsioonid ei ole alati järjestikused kahendarvud nagu kahendloenduril. Loenduri
loogikaskeemi saamiseks tuleb nüüd vaadelda argumentidena väljundite väärtust eelmisel taktil ja
funktsioonidena trigeri sisendite väärtusi, mis viivad ta soovitud olekusse. Näitena vaatleme Graykoodi
loendurit. Argumentideks on väljundi väärtused G0 kuni G3(näites on ksautatud 4 järgulist Gray kooodi) ja
funktsioonideks on trigerite sisendid d0kuni d3. Gray kood on selline kood, kus kõik järjestikused koodid on
naaberkoodid, see tähendab, et need erinevad
vaid ühe kahendjärgu poolest.
21. Suvapöördusmälu (Random Access Memory - RAM)
Selline mälu kus ükstaskõik millise mälu sõna juurde pöördumine võtab alati sama palju aega, olenemata tema
asukohast mälus.
Jagunemine:
Pooljuhtmälud, mälud, mis tehakse mikroskeemidega. Jaguneb veel omakorda kaheks: mittesäiliv ja säiliv.
Mittesäilivad ei suudavad informatsiooni endas hoida seni kuni on mälus elektrivool. Erinevad tüübid on
staatiline(SRAM) ja dünaamiline(DRAM).
Säilivad pooljuht mälud on sellised mis säilitava informatsiooni ka endas kui vool salvestussüsteemist on
kadunud. Erinevad tüübid on neil ROM, PROM, EPROM, EEPROM, FlashEPROM.
Eraldi on sellised mälud kus kasutatakse magnetkihti ehk
magnetmälud. Sellised mälud on säilitavad endas
informatsiooni ka siis kui toite mäludelt ära kadus, sest tegemist on magnettehnoloogiaga. Enam neid ei kasutata.
22. Erkaanitehnoloogiad
Mõisted:
Color Display – värviline kuvar
Monochrome Display – ühevärviline (taust ja esiplaan)
Gray-scale Display – halltoon esitus
Pixel (Picture element) – ekraanivälja punkt
Resolution – eraldusvõime (pixelit vertikaal x pixelit
horisontaal suunas)
Horizontal Frequence – Reasagedus (ühe sekundi jooksul kuvatavate pikselite arv – TV 15,625 kHz, kuvar 24
kuni 115kHz).
Vertical Refresh Rate- Kaadrisagedus (millise sagedusega joonistatakse üle kogu pilt) Kuvaril peaks olema
vähemalt 70-75 Hz (tavaliselt kuvar võimaldab 30 – 160 Hz).
Interlaced Display – Poolkaaderkuva
Non- Interlaced Display - Täiskaaderkuva
Sünkronoseerimine
●
Multiscanning, Autosync, Multisync Display – kuvar suudab ise sünkroniseeruda suvalisel sagedusel
videokaardi signaalide järgi
●
Fixed-Frequence Display – kuvar töötab ainult mingil kindlal sagedusel
●
Multifrequency, Variable-Frequence Display – suudab töötada kindlatel fikseeritud sagedustel
(standartide järgi)
Dot Pitch (aperture grill pitch) – Punktisamm
Degaussing – Demagneetimine
Ekraani suurus – diagonaali pikkus tollides ( näiteks 14’, 15’, 17’, 19’, 21’)
LCD (Liquid Crystal Display)
LCD Ekraanides on mitu kihti. Kõige all on taustavalgus. Siis on polarisatsiooni filter, mis laseb läbi vaid
0-kraadise polarisatiooniga valgust. Järgmisena on vedelkristallkiht, kus sees on spiraalid, mis muudavad
valguse polaarsust vastavalt sellele kuidas spiraale mõjutatakse pingega. Spiraalid koos järgmise
polarisatsioonifiltriga muudavad valguse tugevust(spiraalid mõjutavad polaarsust). Iga piksel koosneb
alampikslist. Neid on kolm, sinine, punane ja roheline, Vastavalt sellele, kui tugevasti alampikselt helendab(mis
on polaarsusega määratud) moodustub pikslile värv. Algusaegadel olid LCD kurvarid aeglase reageerimisajaga
ja suhteliselt kehva pildiga. Nüüd on need vead parandatud. Ainus mida kurdetakse on, see et võtavad rohkem
voolu kui LED kuvarid ja seda taustavalguse pärast.
WTF klubile:
http://www.youtube.com/watch?v=k7xGQKpQAWw
Plasma ekraanid
Selle asemel et kasutada kristalle mis muudavad valguse polaarusust on plasmaerkaanides pikslisuurused
gaasikapslid, mis helendavad kui neile voolu anda.
Plasmaekraanid koosnevad kolmest kihist. Tagumine ja pealmine on läbipaistvad eletrijuhtidest liinid ning nende
vahel on aukudega isolatsioonimaterjalist kiht. Augud täidetakse argooni-neoorini gaasiseguga. Mõjutades neid
aineid pingega hakkavad need helendama.
Plussid: parem värvieraldus(erksamad tänu teholoogiale, sest erinevalt LCD-st kus valgus läbib kihte, tekib
heledus siis kui luuakse värv pikslis).
Miinused: võtab rohkem voolu, mis tähendab ka suuremat soojuse eraldust, eluiga ühem kui LCD-l, kui mõni asi
on pikalt ekraanil(näiteks telekanalite logod) siis need “põlevad sisse”.
LED
Kui LCD-s on mitu kihti ja ka taustavalgustus siis LED tehnoloogial põhinevad ekraanid taustavalgust ei vaja
sest pikslid ise kiirgavad valgust. Ekraan ongi LED dioodid, mis kiirgavad valgust. Värvide jaoks kasutab LED
ikka sama moodi rohelise, sinise ja punase segamist kuid värvi tekitavad elemendid on ühe dioodi korpuse sees.
Plussid: võtavad vähe voolu
Miinused: kallis
OLED
Põhimõtteliselt sama mis LED, aga kiirgavaks kihiks on orgaaniline pooljuht. Plussid: ekraanid võivad palju
õhemad olla ning palju ilusamate värvidega kui teised tehnoloogiad. Teoreetiliset võimalik OLED erkaane
võimalik teha painduvaid erkaane ning printida ekraane (jugaprinteriga). Miinused: hetkel kallis ning “toores”
tehnoloogia(eluiga on kordades madalam kui LCD-del), energia kulu varieerub vastavalt sellele mis on ekraanil,
tumedamaga vähem, heledamaga kordades rohkem (seda seepärast, et taustavalgust ei ole). Samuti on OLED
ekraan Päikse käes raskesti loetav, kuid erinevate kihtide ja filtritega on seda võimalik parandada.
23. Puutetundlikud erkaani(16. mai loeng)
●
Takistuslik puuteekraan
1982. leiutatud tehnoloogia. Pikalt turgu valitenud. Thrust-i tehtud tehnoloogia.
Ehitus. Kõige taga on klaasis alus ning tema peal on kaks takistusliku riba., mille vahel on isolaator.
Kaks kihti on selleks, et saada horisonaatl suund ja vertikaalsuund(x ja y kordinaat). Puudutusel
muutub takistus.
Järgnevat nimetatakse
“nelja juhtme süteemiks”. Puudutus toimub siis mõõdetakse miilsekundiga ära
takistus ning seal kus takistus muutus on puudutus. Mõlemas kihis toimub mõõtmine eraldi. Saadakse
analoogiväärtus mis läheb muundurisse, kust saadakse digitaalkujul väärtus.
“Viie juhtmega tehnoloogia” erineb selle poolest, et välimises pinnas antakse pinge nii
horisontaalsuunale kui ka vertikaalsuunale.
Plussid takistusliku puuteekraani juures on hind, ei ole mustuse suhes tundlik ning puudutada saab
kõigega(kinnastatud käega ja suvalise objektiga) . Negatiivse poole pealt saavb välja tuua, et pehmed/
elastsed pinnad mida puudutatakse mõranevad pika aja jooksul ning seetõttu on nende eluiga lühem,
väheseid mõrasi saab eemaldada kalibreerimisega. Samuti ei ole sellel tehnoloogial korduv või
mitmikpuudutust. Küll aga modifitseeritud tehnoloogial, kus on takistusribad, mis on nii horisontaal ja
vertikaalsuunas. Ribadele antakse väga lühikese intervalli tagant voolu. Samuti on probleemiks valguse
kadu - öeldakse, et kuni 70% valguses läheb kaduma, takistuslik kiht ei ole nii valgust läbilaskev kui
võiks.
●
(Pind) mahtuvuslik puuteerkaan
1965. välja mõeldud tehnoloogia. Leiutajaks Jonhson. Tänapäeval kõige rohkem levinud (turuosa
ligikaudu 70%).
Jagatakse kaheks. Pindmahtuvuslikud ja projekteeritudmahtuvuslikud.
Pindmahtuvuslikul antakse pinnale vahelduvvool, mis tekitab välja. Puudutusel läheb osa eletrist
puudutavasse objekti, sellise kao fikseerivad andurid. Plussid sellise tehnoloogia puhul on, et eluiga on
väga pikk, 90% valgusest tuleb läbi, kannatab elektrit mittejuhitvat mustust. Negatiivne on see, et
elekrtit mittejuhtivate objektidega ei toimi(saaks teha, aga nii oleks ta ebatäpne).
Projekteeritudmahtuvuslikul ei ole sellist pinda kuhu antakse eletrit vaid võrk/ ribad. Iga ristumiskoht
on kondensaator. Ridu ja veerge mööda käib vahelduvvool. Sama moodi, kui tekib puudutus, tekib ka
voolukadu.
●
Infrapuna puuteekraan
Üks tehnoloogia on, et infrapuna valgusdioodid on üleval või all ning paremal ja vasakul. Kui on
üleval infrapuna diood siis on all andur. Infrapuna valgus liigub andurini ning puudutades tuleb kiirele
ette takistus ei toimu ning andurid registeerivad puudutuse.
Teine võimalus on täieliku sisepeegeldusega. Põhimõtteliselt sama, aga infrapunakiir liigub pindmises
kihis, teisel juhul oli alamas kihis, täieliku füüsikalise nähtuse, täieliku sisepeegeldumisega.
Plussid: vastupidav, saab puudutada peaaegu kõigega. Negatiivne on see, et mitmikpuudet ei ole. Kahte
puudet tõlgendatakse nelja puutena. Mustus on võib olla probeemiks.
●
Aukustilise laine impulsi tuvuastusega ekraan
000. leiutatud tehnoloogia. Nurkades on Peiso andurid. Need on tehtud selliselt, et kui füüsiliselt
mõjutada is tekib laeng, ning kui anda pinget siis muudavad enda kuju. Kui puudutavat pinda
puudutada, tekib lainete levimine/ võnkumine ning Peiso andurid võtavad need vastu. Plussiks on see,
et puudutada võibobjektiga. Miinuseks on see, et kui puudutus on staatiline või paigal siis seda ka ei
registreerita.
●
Optilised puuteerkaanid
2000. aastal leiutatud. Põhineb kaameral. Kaks tüüpi hajutatud valgusega ja hajutatud pinnaga.
Hajutatud valgusega ekraan on umbes sama nagu täieliku sisepeegeldusega infrapuna ekraan. Erineb ta
selle poolest, et andureid ei ole, mõlemal küljel on infrapuna dioodid. Vastuvõtja/ kaamera fikseerib
murdepunkti kui puudutus toimub.
Hajutatud pinnaga on selline kus dioodid ei ole mitte puudutatavas pinnas vaid pind mida puudutatakse
on hajuti ning sinna lastakse infrapunavalgust mis paiknevad hajuti all. Vastuvõtja jälle fikseerib ära kus
valgufoon
muutus
ning
puudutus
registreeritakse.
●
Pindaukustilised lained
Kasutatakse küllatki vähe. Ühes nurgas on kaks generaatorit mis tekitavad pidevalt võnkumisi
puutepinnas. Igas servas on võnkumiste peegeldajad millega tekib ühtlane võnkumiste foon. Puudutades
sumbuvad võnked puudutavasse objekti ning kahes nurgas olevad vastuvõtjad registreerivad selle.
●
Jõutundlik puuteekraan
Tehnoloogia pärineb 1960. aastast. Erinurkades on surveandurid või Peiso andruid. Puudutusel andurid
reageerivad vastavalt/ Peiso andur annab laengu. Plussina on see, et klaas võib olla väga paks.
Negatiivne on see, et on aeglane, kiireid puudutusi ei registreeri. Samuti pole mitmikpuute võimalust.
24. RAID ja SSD
RAID on kahe või enama ketta massiiv. Püütakse siis saavutada, kas suuremat veakindlust, kiirust või madalamat
hinda(näiteks võtta kaks 256GB ketast ja saada 512GB ketas). RAID jagatakse klassideks või level-iteks.
RAID0 (kasutatakse ka kirjapilti RAID Level 0) Non-Redundant RAID või Stripped RAID/ drives.
Saab kasutada alates kahest kettast. Kettad liidetakse üheks. Kirjutades näiteks kümme ühikut infomatsiooni
sellisele ketaste massivile võtab teoorias kaks korda(kaks sellisel juhul kui on kaks ketast, kui kolm siis kolm)
vähem aega. Kontrolleris(kontroller või olla nii riisvaraline kui ka tarkvaraline) jagatakse andmehulk
väiksemateks tükkideks, täpselt nii suurteks kui on määratud (tähele tuleb panna, et kui jupid on alati sama
suured, ka siis kui andehulk on ise väiksem kui jupp) ning siis kirjutab samal ajal kõikidele ketastele. Tänu
sellele tõuseb kirjutamise ja lugemise kiirus, aga langeb veakindlus. Kui üks ketas hukkub siis on andmete
taastamine peaaegu võimatu, andmeid saab vaid kõikide ketaste olemasolul.
RAID1 (kasutatakse ka kirjapilti RAID Level 1) Mirrored RAID.
Saab kasutada alates kahest kettast. RAID0-ist erineb selle poolest, et kettaid ei jagata sellisel moel üheks.
Kirjutatakse küll mõlemale, aga üks on varukoopia/ kloon teisest. Kui üks ketas hukkub siis on teisel kettal ikka
kõik andmed alles. Võrreldes mitte massiivis ketastega, kiiruse erinevust RAID1-ega ei ole(nagu on RAID0-iga).
RAID2
Teoreetiline võimalus, reaalset ei kasutata. Veakindlust on tõstetud Hamingi koodiga. Ketastele kirjutatakse
bittide haaval informatsiooni. Kaks kettapaari, ühele paarile kirjutatakse bittide haaval informatsiooni, teisele
kirjutatakse veaparandus koode. Mõlemat paari kasutatakse nii lugemisel kui kirjutamisel, lugemisel
kontrollitakse ja parandatakse informatsiooni ning kirjutamisel luuakse ning kirjutatakse veaparanduskoode.
RAID3
Kasutatakse väga vähe. See tehnoloogia kasutab paarsusbitti ning võimaldab vigu avastada, mitte neid
parandada. Ühes järgus olevaid muutusi avastatakse, mitte aga rohkem. Oletame, et on neli ketast, kolm neist on
andmekettad kuhu kirjutatakse paarsusbittidega informatsiooni ning neljas on primaarne ketas kus on info selle
kohta kus andmed on. Kui nüüd on vaja andmeid kätte saada siis kõigepealt pöördutakse primaarse, meie puhul
neljanda ketta poole, ning siis sealt saadakse teada kus on vastavad andmeosad. Seda enam ei kasutata, sest
primaarne ketas on pudelikaelaks sellises massiiviks.
RAID4
Väga sarnane RAID 3 ja 5-ega. Andmed jaotatakse blokkidena ketaste vahel ning jälle on ka mängus primaarne
ketas kuhu salvestatakse blokkide informatsion. Ikka veel on pudelikael(kuid siiski vähem kui RAID, 3-es, sest
andmed on blokkidena) primaarne ketas.
RAID5
Saab kasutada alates kolme kettaga. Eespool sai kirjutatud, et RAID 5 ja 4 on sarnased. Kõik on sama ainult, et
paarsusinformatsiooniga ketast ei ole, see kirjutatakse igale kõikkidele ketastele mis massviis on. Samuti kui üks
ketas hukkub siis andmed on taastatavad, paarsusinformatsiooni alusel arvutatakse kadunud informatsioon/ bitid
välja. Kui hukkub ka teine ketas ei ole andmed enam taastatavad.
RAID6
Saab kasutada alates nelja kettaga. Võrreldes RAID5-ega on kindlus suurem. Hukkuda võib ka teine ketas ilma,
et töö peatuks.
RAID10 (kasutatakse ka kirjapilti RAID 1+0)
Saab kasutada nelja ja enama kettaga. Nimes olev 1+0 viitabki tegelikult RAID0 ja RAID1 hübriidile. Kaks
ketast on omavahel liidetud ja nende vahel toimub RAID0. Ülejäänud teevad varjukoopiaid. Igal kettal on oma
kloon/ koopia, kui üks ketas hukkub taastatakse andmed või võetakse kasutusele varuketas. Miinusena võib
välja tuua, kõrge hinna(neli ketast min).
SSD(Solid State Disc, eestikeeles pooljuhtketas)
SSD on kettatüüp, mis selle asemel, et salvestada andmeid magnetpinnale teeb seda hoopis mälukiipidesse. See
annab talle palju suurema kiiruse kui tavalistel ketastel, seda nii seepärast, et mälukiipidele saab kiiremini
salvestada. Samuti pole nii suurt pöördumisaega kui kõvaketastel, seda seepärast, et lugev-kirjutavaid päid ei ole
vaja ümber tõsta. Vastupidavam tänu sellele, et mehaanilisi osasi ei ole ning ei ole mõjutatud magnetväljast.
Põrutustele palju vastupidavam, tänu lugev-kirjutavate peade puudumisele. Energiasäästlikumad. Soojuse
eraldumine on väiksem. Väiksem kaal. Negatiivse poolena võib välja tuua mitmeid kordades kõrgema hinna kui
kõvakestastel, väiksema mahu kui kõvaketastel ning algusaegadel esinenud probleemid, mis hukutas palju
SSD-si (wear level oli üpris lühike). SSD-d tegelikult “kuluvad”. Kulutab uuesti kirjutamine, millega kaasneb
kustutamine. See on seotud ujuv paisuga transtoriga.
25. Katkematu pingeallikas (UPS).
puhvertoiteallikas, ups. UPS on seade mis peab kaitsma arvuti riistvara ja tarkvara võimalike elektrivõrgu
häirete mõju eest. Elektrivõrgu häired võivad rikkuda riistvara või katkestada programmi töö ebasobival hetkel ja
rikkuda töödeldavat infot.
Häired:
1.
täielik elektrikatkestus blackout
2.
ülepinge surge, over-voltage
3.
pingelangus under-voltage, sag, brownout
4.
impulsshäire spike, transient, impulse
5.
mürad noise
Sidus-UPS koosneb järgmistest osadest:•Sisendfiltrid •Vahelduv-alalispinge muundur (alaldi) mis toimib ka aku
laadijana•Alalis-vahelduvpinge muundur mis saab normaalolukorras sisendpinge alaldist aga voolu katkestuse
korral tuleb toide akust•Väljundlülitus mis muudab muundurist tulevat vahelduvpinget tavalise siinuselise pinge
sarnaseks (vähemalt püüab muuta täisnurkseid impulsse siinuseliseks)Siin toimub kahekordne muundamine
vahelduv voolust alalis vooluks ja tagasi. See tagab suhteliselt hästi müradest filtreeritud toite ja ka sisend pinge
suurematel kõikumistel viiteta ülemineku aku toitele siludes ka kõikumisi.
Vallas-UPS Antud juhul kajastuvad võrgupinge kõikumised ka otseselt UPS-i väljundis. Puudub sisendpinge
galvaaniline lahtisisdestus väljundist. Osa võrgu müradest ja häiretest filtreeritakse sisendlülitustes. Kui võrgu
pinge langeb alla kriitilise väärtuse läheb UPS üle akutoitele (ümberlülitus on piisavalt kiire, et arvuti töö ei
katkeks) ja arvuti töö jatkub kuni akud seda võimaldavad. Akud võivad võimaldada ainult kiiret programmide
töö korrektset lõpetamist kuid kallimad UPS-d lubavad ka teatud aja jooksul töötada edasi. Arvestades akude
suurt hinda on viimased UPS-d muidugi oluliselt kallimad.
Aktiivne vallas-UPS Võimaldab astmelist pinge reguleerimist. Kui sidus UPS võimaldab elektroonika abil
pidevalt hoida pinge väärtus paigas ja vallas UPS vaid teatud kriitilisest väärtusest väiksema sisendpinge korral
minna üle aku toitele, siis siin on võimalik astmeline pinge väärtuse korrigeerimine
26. Adresseerimise viisid.
1) Vahetu adresseerimine – direct addressing
Operandi määratlemiseks kasutatakse tema täisaadressi. Instruktsioon pääseb ligi alati ainult täpselt samale
mälukohale, nii et väärtus võib muutuda, aga asukoht mitte. Saab kasutada globaalsete muutujate korral.
2) Otsene adresseerimine - Immediate Addressing
Käsu aadressi osa sisaldabki endas operandi, mitte aadressi või muid instruktsioone, kust operandi leida.
Operand seega laetakse mälust automaatselt samal ajal kui laetakse käsku ning on kohe kasutamiseks olemas.
Nii saab hankida ainult konstante.
3) Kaudne adresseerimine - Indirect Addressing.
Määratava operand tuleb mälust ja läheb mällu, aga tema aadress ei ole instruktsiooniga püsivalt seotud. Selle
asmel säilitatakse aadressi registris. Nii saab erinevate instruktsiooni täitmistega koos kasutada erinevaid mälu
sõnu.
4) Autoinkrementne adresseerimine - Autoincrement Addressing
loetakse operant välja ja aadress säilitatakse modifitseeritult. LIFO- pinumälu, Pinuosuti (Stack Pointer), CP+1
liidetakse.
5) Autodekrementne - Autodecrement Addressing
lahutamine. (sama, mis eelmisel).
6) Segmenteerimine - Segmentation
vanem osa aadr.-st hoitakse lehekülje nr alles ja modifitseeritakse. Segmendi aadress + operandi aadress
7) Adresseerimine indekseerimisega – Indexed Addressing
käsu juurde kuulub pikk baasaadress ja liidetaske juurde nihe, mis annab uue aadressi.
8) A baseeerimisega – Based Addressing
Käsukoodi juurde kuulub nihe, mis võib olla lühem kui pikk aadress.
9) baseerimine ja indekseerimisega - liidetakse kõik (baas kui ka indeks) kokku.
10) Suhteline adresseerimine - PC - käsuloendur + Nihe ja saadakse uus aadress.
LISA (Margus):
Adresseerimise viisid:
1.Aadressi registri otsene adresseerimine (address register direct) – instruktsiooni operandi väli sisaldab viidet
registri aadressile, millest tuleb operand laadida. Näiteks MOVE D2, A2 tähendab [A2] ← [D2]. Ehk lae D2 sisu
A2-te. Põhimälu selle adresseerimisviisi puhul ei kasutata, ainult registreid.
2.Otsene adresseerimine (Immediate Addressing) – instruktsiooni operandi väljas on kirjeldatud operandi ennast,
ehk käske hakatakse täitma täpsustatud operandi väärtusega. Näiteks MOVE #123 D0 tähendab D0 ← 123 ehk
D0 laetakse number 123. Kiire, ei pea kasutama tsüklit mälu ega registri poole pöördumiseks. Kasutatakse
konstantide puhul, mis on teada programmi kirjutamise ajal.
3.Absoluutne adresseerimine. Instruktsiooni operandi väli sisaldab viidet aadressile, millest operand laadida. Ei
võimalda kirjutada position-independent koodi. ADD 22 D0, liida 22nda mälupesa sisu D0-le ja salvesta D0-i.
4. Aadressi registri kaudne adresseerimine (address register indirect addressing) – mäluregistri sisu väärtust
kasutatakse viitena mälupesale, millest laetakse operandi väärtus. MOVE (A0) D0 tähendab loe A0 sisu, saadud
väärtust kasuta lugemaks antud väärtusega mälupesa sisu, näiteks kui A0 sisuks on 3, siis loetakse väärtus
kolmandast mälupesast ja salvestatakse see D0-s.
Jaguneb veel a) w/ displacement b) w/ postincrementing
a)Displacement – kasutab lisana offseti, kui tahame saada näiteks mingi tabeli 7ndat väärtust ja teame, et tabeli
algus on märgitud A2-s, siis kasutaksime offsetina nr 7-t. Offseti märgitakse d16. Näiteks MOVE 7(A2) D0
tähendab võta A2-s olev väärtus, liida sellele offset 7, saadud tulemust kasuta mäluaadressina, millest laadida
väärtus D0-i.
b)Postincrementing – aadressi registri sisu väärtus suurendatakse ühe võrra peale selle kasutamist. Võimaldab
kergelt läbi käia kõik tabeli elemendid ilma, et peaks pointerit manuaalselt uuendama peale igat mälupesa
külastust. MOVE (A9)+ D0 on sama, mis MOVE (A9) D0, ADD #1 A9.
c)Predecrementing – aadressi registri väärtus vähendatakse ühe võrra enne andmetele ligipääsu. Kasutatakse, et
käia läbi tabelite tagantpoolt ettepoole.
d) Indekseeritud adresseerimine (Indexed addressing) – instruktsiooni operandi väljas on nimetatud offset(Ai,
Aj), mälupesa aadress arvutatakse offset+Ai+Aj. Kasutatakse kahemõõtmeliste arrayde/tabelite ligipääsuks, kus
üks register määrab rea, teine veeru positsiooni.
5. Suhteline adresseerimine (Relative addressing) – lubab operandi aadressi täpsustada programmi loenduri
suhtes. See on väga tähtis addresseerimise viis, sest lubab kirjutada PIC (position-independent code). MOVE
d16(PC). Accessib mälupesa numbriga PC väärtus + offset d16 väärtus.
27. Mikroarvuti ja siinid (AB, DB, CB).
Mikroprotsessorite ilmumine tõi kaasa uue arhitektuuri tekke. Selleks on siini arhitektuur kus ühendliinid e.
siinid (füüsiliselt komplekt juhtmeid) on kasutusel kõigi süsteemi komponentide vahel info vahetamiseks. Kõik
süsteemi komponendid peavad täitma teatud formaalseid reegleid (siini protokoll), et vältida konflikte. Probleem
on selles, et tehnoloogiliselt on piiratud mikroskeemi väljaviikude arv ja nüüd peab suhteliselt võimas protsessor
suhtlema kõigi teiste süsteemi komponentidega läbi selle piiratud kanali (siini).
Erinevad siinid ja nende osa andmevahetuses. Siinid jagunevad oma funktsioonide järgi kolmeks:
1) Andme-siin (Data Bus (DB)) - siini järgulisus määrab ühe siini tsükliga (pöördumine lugemiseks või
kirjutamiseks mälu või sisend-väljund seadme poole) edastatava sõna järgulisuse. Kui DB on 32 järguline
(koosneb 32-st liinist) saab ühe siini tsükliga edastada 32 bitilise sõna.
Täiendus - Mööda seda siini liiguvad andmed mälusse write tsükli ajal, või read tsükli ajal mälust prosesse.
Lisaks toimub I/O info liikumine mööda seda siini. Andmesiinil liigub info mõlemat pidi.
2)Aadress-siin (Address Bus (AB)) - aadress-siini kaudu liiguvad kaks aadressi. mälu pesa aadress, mille poole
toimub pöördumine ja sisend- väljund seadme aadress. Aadressi dekooder on mälu sees ja sisend/väljund seadme
jaoks on eraldi dekooder. Tegemist on homogeense siiniga ja AB liinidel liigub aadressi edastamisel info ühes
suunas. AB järgulisus määrab maksimaalse adresseeritava mälu mahu ja maksimaalse sisend-väljund seadmete
arvu. Selleks, et suurendada mälu mahtu, tuleb aadress-siinile lisada juurde järke. Kui see ei ole tehnoloogiliselt
võimalik tuleb kasutada muid meetodeid.
Täiendus(Margus) - Aadressi siini kasutab protsessor päringu edastamiseks mällu. Nagu eelpool mainitud siis
liiguvad selles ainult aadresside asukohad, millest andmeid lugeda/kirjutada. Päringu vastus saadetakse läbi
andmesiini tagasi protsessorisse. Tavaliselt jooksevad nii data kui address bus läbi North Bridge-i (aka Memory
Control Hub), mis handle-b kõiki mälu/graafikaga seotud andmevahetusoperatsioone. (Data bus ja address bus
kokku moodustavad front-side busi, mille kiirus määrab ära kogu arvuti kiiruse. Läbi selle siini jooksevad ka
sisend/väljund info.)
3)Juht-siin (Control Bus (CB)) - kaudu liigub juhtimiseks vajalik info. R/W + siiniprotokolli juhtimine, eristab
pöördumise mälu või I/O seadme poole. Siinitsükli alustamisel saadab välja olekusõna, milles määrab R/W, CS
jne. Erinevalt AB ja DB’st pole homogeenne.
28. Alamprogrammide poole pöördumine ja pinumälu.
Pinu võib ette kujutada pealt avatud anumana, kuhu võib üksteise peale laduda andmeid. Oluline omadus on
võimalus andmeid ära võtta ainult sissepanekule vastupidises järjekorras. Viimasele sissekandele osutab pinuviit
– s.o. aadress, millelt on võimalik välja lugeda viimasena salvestatud muutuja ning millele järgnevale aadressile
võib kirjutada uue muutuja. Analoogiliselt anumaga võib pinu täis saada, kui temale eraldatud ruum on ära
kasutatud. Pinuga opereerimiseks on olemas käsud PUSH – salvestamine pinusse ja POP – pinust lugemine.
Järjekorda võime ette kujutada toruna, millesse ühest otsast pannakse andmeid juurde, teisest otsast aga võetakse
välja. Struktuuri mõttes võib pinu ja järjekorda võrrelda nii: pinu on selline järjekord, kus teenindamise printsiip
on LIFO (last in first out) – viimasena saabus, esimesena teenindati. Tavalise järjekorra teenindamine toimub
printsiibil FIFO (first in, first out). Järjekord andmestruktuurina eeldab ainult FIFO printsiibi kasutamist.
29. Käsuformaadid : 0, 1, 2, 3 ja 1,5 aadressiga arvutid. (Kui keegi teab seda targemalt kirja panna, siis
laske käia, sest ma, ausalt öeldes, ei saa sellest absoluutselt aru)
3 aadressiga arvuti –
käsukood + I operandi pikk aadress + II o. pikk aadress + resultaadi pikk aadress
A=B+C
2 aadressiga arvuti –
kk + I operandi pikk aadress (resultaat läheb sinna) + II operandi pikk aadress
B=B+C
1,5 aadressiga arvuti –
kk + I operandi pikk aadress + resultaadi lühike aadress (registriaadress)
1 aadressiga arvuti –
kk + I operandi aadress
Ac – akumulaatorregister.
1 operand asub mälus, teine operand ning resultaat samal akumulaatorregistri aadressil
0 aadressiga arvuti - pinumäluga põhinev arvuti. Aadresse ei ole käsu formaadis. Operandid võetakse
pinumälust ja sinna kirjutatakse ka tulemus.
1 aadressiga arvuti - Käsu koodiga saab olla kaasas vaid üks pikk aadress, mis viitab mälu pesale, kus
võib olla operand. Kui on tegu kahe operandiga käsuga, siis asub teine operand akumulaatoris ja sinna
pannakse ka resultant.
2 aadressiga arvuti - resultaat salvestatakse tavaliselt ühe operandi kohale, sest eraldi aadressi resultaadile
ei saa määrata.
3 aadressiga arvuti - käsukoodiga on kaasas 3 pikka mälu aadressi. Seega saab näidata kahe operandi ja
resultaadi asukoha.
1.5 aadressiga arvuti - käsukoodiga saab kaasas olla üks pikk mälu aadress ja lühike aadress, mis viitab
registermälu registrile.
Käsusüsteem:
andmeedastuskäsud – MOV, LOAD, STORE
aritmeetika-loogika käsud – AND, OR, SUB, MUL
siirete käsud –JMP, CALL, RET
pinumälu, I/O-seadmete, CPU juhtimise käsud – PUSH, POP, IN, OUT, NOP
30. Arvuti mälu klassifikatsioon.
Arvuti mälu jaguneb suvapöördusmäluks (RAM) ja jadapöördusmäluks. Viimane jaguneb magnet- ja optiliseks
mäluks. Magnetmälu jaguneb säilivaks mullmäluks, floppy-ks, kõvakettaks, magnetkettaks ja lindiks. Optilised
mälud on CD-ROM, CDR, CD-RW, DVD, magnetoptiline ja holograafiline. Suvapöördusmälu e. RAM jaguneb
pooljuhtmäluks ja magnetmäluks, mis jaguneb ferriitmäluks. Pooljuhtmälu jaguneb mittesäilivaks ja säilivaks
mäluks. Mittesäilivad mälud on staatiline RAM ja dünaamiline RAM, säilivad mälud on ROM, PROM,
EPROM, EEPROM ja FlashEPROM.
Skeemina:
Suvapöördusmälu RAM
1) Pooljuhtmälu
a) mittesäiliv (volatile)
staatiline (Static RAM)
dünaamiline (DRAM)
b) säiliv (nonvolatile):
ROM
PROM
ERPM
EEPROM
FlashEPROM
2) Magnetmälu (magnetic)
säiliv (nonvolatile)
Ferriitmälu (Ferrite core)
Jadapöördusmälu
1) magnetmälu (magnetic)
säiliv(nonvolatile)
mullmälu (bubble)
pehme ketas (Floppy disc)
kõvaketas (Hard disk)
Magnetketas
Lint (tape)
2) optiline mälu (optical)
säiliv:
CD-ROM
CD-R
CD-RW
DVD
31. Siinide juhtimine - katkestusteta süsteem, katkestustega süsteem ja prioriteedid. (täiendan veel seda
osa!!)
Vaatleme, kuidas arvuti suhtleb välismaailmaga, ehk kuidas informatsioon jõuab ning väljub arvutist. Siine
kasutatakse protsessori ja lisaseadmete jaoks, et liigutada andmeid ühest kohast teise.
Siinide juhtimist kasutab CPU, et kommunikeeruda arvuti lisaseadmetega läbi füüsiliste ühenduste, näiteks
kaablite. Erinevate signaalide kogumikena, nagu ka andmete lugemine, kirjutamine ja katkestamine, mis lubavad
protsessoril juhtida ja muuta arvuti erinevate osade tegevust.
Üldiselt on siini ülesanne vähendada teid/radu (pathway), mida arvuti vajab teiste seadmetega ühendumiseks.
Siin lubab kommunikeeruda seadmete vahel ühe kanali abil ning seda iseloomustab ühes ajahetkes läbitav
informatsioonihulk. Informatsiooni väljendatakse bittides ning on vastavuses füüsiliste liinide arvuga, mida
kasutatakse andmete saatmiseks.
Igal arvutil on tavaliselt sisemine ja laienev (expansion) siin. Sisemine ehk esine (front-side) siin juhib
kommunikatsiooni CPU ja keskmälu vahel. Laienev ehk sisend-väljund-siin ühendab emaplaadi osasid nagu
kõvakettaid ja porte. Enamus siini süsteeme sisaldavad tüüpiliselt 50-100 eraldiseisvat ühendamiseks mõeldud
füüsilist liini.
Juhtsiin on kahepoolne – käsusignaale kantakse üle protsessorist ning riistvarast saadakse vastus signaalina.
Selle tulemusena koosnevad juhtivad siinid juhtliinidest, mis kõik kannavad edasi spetsiifilist signaali. Juhtliinid
erinevad vastavalt protsessoritele.
Näiteks, arvuti CPU kasutab andmesiini (data bus), et salvestada ning lugeda informatsiooni keskmälust. Juhtsiin
lubab CPU’l määrata, kas ja millal süsteem salvestab ning loeb andmeid. Seda seetõttu, et juhtsiinil on juhtliin
lugemiseks ning teine liin salvestamiseks, mis määravad selle, kuidas andmed liiguvad (mälust CPU-sse või
vastupidi). Kui CPU’l on vaja salvestada andmeid keskmällu, siis saadetakse signaal juhtsiini salvestamise
juhtliinile.
Teised siinide liigid on andme- ja aadressi siinid. Andmesiinid liigutavad käske ning informatsiooni kõikide
arvuti funktsionaalosade vahel. See siin on kahesuunaline ning saab ülekannet teha vaid ühes suunas antud
hetkel. Andmesiin saadab andmeid CPU ja mälu vahel ning mälu ja sisend-väljund sektsiooni vahel.
Aadressi siin on ühesuunaline ning funktsioneerib kaardina mälu jaoks. Kui arvuti süsteem vajab ligipääsu teatud
mälukohale või sisend-väljund seadmele, siis esitab seade õige aadressi aadressi siinile. Aadress tuntakse ära
vastava lüliti poolt, mis seejärel pöördub vastava mälu või seadme poole andmete salvestamiseks või kätte
saamiseks andmesiinilt.
Siini arhitektuur mõeldi välja, et protsessorile võimalikult ruttu anda ette käsukoode ja andmeid, et CPU ei peaks
ootama. Muidu oleks protsessori kiirus mõttetu. Nagu liiklus – meil on teedevõrk – ühine ressurss kõikide jaoks
ja kõik peavad täitma teatud reegleid ning kui me kõik seda täidame, siis avariisid ei tohiks juhtuda. Nii on ka
siinidega – eksisteerib üks siinide hulk, mille kaudu kogu info liigub ja kõik süsteemi kuuluvad eeskirju – siini
protokol.
Kolme olekuga siini puhver – saab kolmandasse olekusse – väljund on lahti ühendatud (enable) – ei ole null ega
üks vaid lahti tehtud. Kui E=1 avatakse tee kõrgele olekule, E=0. Täidab ka võimendi rolli.
Saame B-st A-sse saata või A-st B-sse või täiesti lahti ühendada. Kahesuunaline andmevahetus!
Siin ei ole midagi mud kui komplekt juhtmeid – kui 32 järguline siin siis meil on 32 juhet, iga üksik juhe/liin on
eraldatud teistest siini puhvrite abil.
Meil on süsteemsed siinid, teatud hulk komponente, mida kasutavad kõik siinid. Iga süsteemi komponendi sees
on sisemised liinid, ehk sisemine siin, on samade driverpaaridega eraldatud.
Kõige vanem siiniarhitektuur – ühe siiniga. Üks liinide komplekt ja sinna pandi peale CPU, mälu ja I/O
seadmed. Tuli välja ka esimene problem – ühe siini kaudu tuleb infot kanda, mis tähendab, et kiiremad seadmed
pidid kunstlikult aeglasemalt saatma infot. Edasi tulid kahe siiniga – kiiremad seadmed ühe siini küljes ja
aeglasemad teise küljes. Ehitati vahele sild – peab suutma nende kiiruseid sobitada. Kõige levinum on kolme
siiniga – lokaalne siin, süsteemi siin, laiendus siin, mida eemale protsessorist seda aeglasemaks läheb. (CPU on
lokaalsel siinil).
Siin teeb teatud mõttes paindlikuks – saame teha lisakaardi, vaja teada siiniprotokolli ja saame laiendada.
Funktsioonide järgi kolmeks: andme-siin (üks hulk juhtmeid andmete edastamiseks, siin on homogeenne – kui
mälust CPU’sse siis avatakse kõik liinid selles suunas ja vastupidi). Andme-siinid määravad ära, palju saame ühe
tsükliga ära saata andmeid. Nt ühe pöördumisega saame saata 8 sõna. Aadressi-siin (homogeenne siin, mida
laiem on siin seda rohkem mälu on võimalik aadresseerida, sama aadressiga määratakse ära sisend-väljund
seade, igal sisend-väljund seadmel on ka oma aadress). Siin mis korrastab, et ei tekiks vastuolusid ja selleks on
juhtsiin (control bus), mis ei ole homogeenne. Juhtsiini kuuluvad neli signaali: mälust lugemine, mällu
kirjutamine, sisend-väljundseadmest lugemine ja kirjutamine. Neli signaali, mis on üksteist välistavad. Mäluga
seotud signaalid ja I/O seotud signaalid. Tänu sellele, et nad on välistavad, ei teki konflikte. Signaal tuleb
protsessorist, aga kuidas ta välja oskab saata signaali? See on kõik paika pandud käskudega. Kui programmis
käsusüsteem, siis on olemas näiteks käsk ‘load’ – juhautomaat genereerib memory read ja loetaksegi mälust. I/O
puhul on näiteks olemas ‘in’/’out’.
Need neli juhtsignaali on põhilised!
Liides – protsessori pool, mis suudab täita siini protokolli, teine pool on I/O seadme pool, mis suudab tegeleda
seadme juhtimisega.
Katkestustega süsteem:
Arvuti täidab käske järjestikuliselt juhul, kui hüppeid või hargnevusi pole vahele tehtud. Siiski on olemas oluline
erand nimega ‘katkestus’ – tegevus, mis sunnib protsessorit muutma oma käskude jada. Katkestus võib tulla
signaalina lisaseadmelt või sisemiselt genereeritud kutse operatsioonisüsteemile. Termin erand iseloomustab
tarkvaralisi riistvaralisi katkestusi.
Paljud mikroprotsessorid omavad madala-aktiivsusega katkestuspäringu sisendit (IRQ – interrupt request input),
mis esitatakse lisaseadmelt päring küsijale. Sõna päring vihjab sellele, et katkestuse päring võib ja võib ka mitte
toimuda.
Prioriteedid:
Arvuti katkestused on nagu katkestused meie igapäevases elus. Näiteks kui kaks õpilast katkestavat loengu ajal
õppejõudu – üks küsimusega ja teine lihtsalt seepärast, et tunneb end kehvasti – siis reageerib õppejõud
esimesena sellel probleemile, mis tundub olulisem. Kui olukord õpilasega, kelle enesetunne oli halb, on
lahenenud, siis võib vastata teise õpilase küsimusele ning loenguga edasi minna.
Enamus arvuteid seisavad silmitsi rohkem kui ühe katkestusega. Mõned katkestuste päringud on seotud
lisaseadmetega nõudes kohest tähelepanu, samas kui on teisi väliseid seadmeid, millega nii kiire ei ole (näiteks
klaviatuur). Täpsuse huvides tuleks mainida, et protsessori katkestuste päringute sisend on ühendatud
välisseadmete liidesega, mitte välisseadme endaga otse.
32. Pinumälu (Stack) - realiseerimine ja kasutamine.
Pinumälu töötab LIFO järjekorras ühe väljundiga, kuhu andmeid sisestatakse või need kustutatakse. Pinumälu
suureneb, kui andmeid sisestatakse ning väheneb kui andmed kustutatakse. Andmeid kustutatakse tagurpidi selle
suhtes, kuidas need mällu on sisestatud. Kohta, kuhu andmed salvestatakse või kust neid kustutatakse, kutsutakse
top of stack (TOS). Järgmist positsiooni andmetes kutsutakse next of stack (NOS). Kui andmed salvestatakse
pinumällu, siis öeldakse, et need lükatakse (pused) mällu ning andmete kustutamist kutsutakse mälust välja
tõmbamiseks (pulled).
Andmete lugemiseks või kirjutamiseks läheb vaja vaid ühte
binaarkujul oleva
t viita arvuti mälupiirkonnale, kust
register algab.
Piltlikult võib kujutada seda kui protseduuri, kus pabereid lisatakse ühekaupa üksteise otsa ja vastavalt
vajadusele võetakse neid sealt ühekaupa.
Kui läheb vaja võtta välje 5 element pealt, tuleb esmalt ära tõsta tema peal olnud 4 elementi, ning ales siis pääseb
soovitud elemendile ligi.
33. Püsimälud : ROM, PROM, EPROM, EEPROM ja Flash.
- ROM Püsimälu (Read Only Memory)
Püsimälu kasut. programmide ning andmete pikaajaliseks säilitamiseks ja lugemiseks. Püsimülud jagunevad
ühekordselt programmeeritavateks ja ümberprogrammeeritavateks püsimäludeks.
Ühekordselt programmeeritavaid mälusid liigitatakse sõltuvalt sellest, kas need programmeeritakse tehases
mälukiibi valmistaja poolt või programmeerib neid kiibi kasutaja. Ümberprogrammeeritavaid püsimälusid saab
kasutaja vajaduse korral kasutada ja uuesti programmeerida. Muut- ja püsimälude töökiirus peab olema
võimalikult suur.
Püsimälude tähtsamad alaliigid:
- PROM programmeeritav püsimälu (PROM- programmable read only memory). Programmeerib kasutaja
spetsiaalse programmaatoriga, põletades mittevajalikud väiksema ristlõike pindalaga ühendused.
- EPROM ümberprog. püsimälu (EPROM- erasable programmable read only memory), elektriliselt kustutatav
ümberprogrammeeritav püsimälu (EEPROM- electrically erasable programmable read only memory) ja Flash.
- EPROM, EEPROM ja Flash tehnoloogiad põhinevad kõik ujuva paisuga väljatransistoridel.
Transistorile on paisu juurde on lisatud teine pais kuhu on võimalik kanda laeng. Selle laenguga muudetakse
transistori avamiseks (suudme ja lätte vahel suureneb järsult vool) vajaliku paisu pinge suurust. Põhineb sellel, et
kui ujuval paisul on laeng, siis alguses tõstes paisu pinget, kulub ta selle laengu kompenseerimiseks ja seejärel
alles avab transistori. Kustutamisel laeng ujuvalt paisult eemaldatakse (EPROM-il ultravioletse valgusega,
EEPRO-il ja Flashil elektriväljaga). Seejärel saab teda spetsiaalse programmaatoriga uuesti programmeerida.
Valides mingi sõna, avanevad ainult need transistorid, mille ujuval paisul laeng puudub ja vastava bitiliini
väärtus on üks. Transistorid, kus on ujuval paisul laeng, ei avane ja vastava bitiliini väärtus on läbi takisti nulli
nivool.
34. Siirete ennustamine (Branch prediction): vajadus, meetodid.· Siirete (hargnemiste) ennustamine.(Branch Prediction)
Vajadus:
Protsessorites on tihti eraldi loogikaskeem mis tegeleb
hargnemiste ennustamisega, et muuta konveier
efektiivsemaks. Hargnemise ennustamine toimub teatud statistiliste kriteeriumite järgi ja ei saa anda alati õiget
tulemust, kuid siiski suudab vähendada konveieri uuesti käivitamise vajaduse tõenäosust.
Strateegiad e. meetodid :
Fikseeritud hargnemiste ennustamine (Fixed Branch Prediction)
Staatiline hargnemiste ennustamine (Static Branch Prediction)
Dünaamiline hargnemiste ennustamine (Dynamic Branch Prediction)
35. Spetsialse riistvara realiseerimine.
Õppejõu sõnul: “Kui võrdlete erinevaid riistvara realiseerimise võimalusi siis see on piisav.
Lugupidamisega T. Evartson”
1. Spetsiaalse riistvara realiseerimisvaldkondade võrdlus ja kus kasutatakse:
Programne lahendus:
Odav, aeglane, paindlik. Kasutusvaldkonnad peamiselt mitte väga nõudlike ning väikesemahuliste ülesannete
juures.
Riistvaraline realistatsioon trükkplaadina:
Kallis, keerukas, väga kiire, jäik. Sobiv suuremahuliste, andmerohkete ning ekstreemsetes oludes läbiviidavate
ülesannete lahendamise jaoks. Väikeste tootmismahtude juures hirmkallis. Juba loodud skeemi ei saa ümber
konfigureerida.
PLA:
Paindlik, odav, säästlik, kuna kasutab optimaalset hulka kristalli pinda. Anti-fuse tehnoloogia vajab suhteliselt
täpset tootmist, muidu võivad tekkida läbilöögid. Ühe ja sama algmaatriksiga võib eri maskide abil luua
erinevaid skeeme. Väikesemahuline tootmine. Ülesanded, mis vajavad kiiret, ka ebatavalistesse füüsikalistesse
tingimustesse sobivat riistvara.
FPGA:
Kaustaja poolt programmeritav. Paindlik. Kasutab optimaalset hulka kristalli pinda.
2. Aga et oleks arusaadav, mis on mis, siis juurde ka mõned selgitused:
Spetsiaalse riistvara realiseerimise võimalused:
Programne realisatsioon + riistvaraline realisatsioon: CPU-ga ühendatakse siine mööda mikrokontroller (RAM,
ROM, CLK, CPU + pordid), selle külge omakorda riistvaraline skeem / trükkplaat. Tegevust kontrollib
multifunktsionaalne CPU oma programmide ja algoritmidega, infot edastab spetsiaalne kontroller. Odav,
laiendatav, aeglane, kohmakas. Võimalik ka puhtalt riistvaraline lahendus --> sellisel juhul luuakse iseseisev
trükkplaat, mis sobib ainult antud ülesande lahendamiseks.
Ülesande püstitamine --> projekteerimine --> mikroskeemi valmistamine --> Application Specific Integrated
Circuit. Kallis, kiire, sobib suurte andmekoguste ning ekstremaalsete rakenduskohtade jaoks.
Programmeeritav loogika:
Tehnoloogiad: SRAM tech – StaticRAM trigerid ühendatakse mux-ga. AntiFuse tech – programmeeritavad
maatriksid, milles saab erinevaid programme luua, põletades programmaatoriga maatriksi sõlmedest 'fuse'
ühendusi. metall-amorfne_räni-metall ühendused.
EPROM tech – Erasable Programmable Read Only Memory – EPROM transistorid, millel npn-ühenduse paisu
ning pooljuhi vahel on veel teine, nn ujuvpais, mis ei lase laengul transistorist hajuda, kuid võimaldab andmeid
UV-kiirgusega kustutada.
(näiteks segmentindikaatori juhtimine püsimäluga --> sisenditeks on aadressid 1..2..3 etc)
Programmeritavad maatriksid: PLA – Programmable Logic Array
Enamasti ei lähe vaja mitme muutuja Boole'i funktsiooni muutujate kõigi kombinatsioonide kasutamist – seega
sisaldavad dekoodrid jms elemendid ülearuseid transistoreid. Konjunktsioone realiseeriv maatriks +
disjunktsioone realiseeriv maatriks. AND-OR-NOT – f.-nide süsteemi jaoks. PLA põhimõte – tehakse maatriks,
mille veergudeks sisendelemendid ja nende inversioonid, ridadeks pingestatud ühendused. Igas sõlmes asub
transistor, mille kollektor on trükitud äärmiselt peene juhtmena (põleb läbi pingel +2V
h
). Vastava
programmaatoriga saab teatud ühenduskohtades connectionid läbi põletada ning panna maatriksi väljundina
realiseerima mingi kindla Boole'i funktsiooni DNK-d.
Kasutaja poolt programmeritavad maatriks-struktuurid: FPGA – Field Programmable Gate Array
Maatriks loogikaelementidest (AND, NOT, OR, ..), mille ümber, maatriks välimiste elementidena asuvad
sisend-väljundblokid. Luues maskiga? ühendusi maatriksi sees ning paigutades sisendid-väljundid, saab skeemi
panna realiseerima mistahes Boole'i f.-ni.
Loogikablokid:
Look-up Table – mingi register, SRAM, ROM, whatever, milles on võimalik säilitada seosed sisendite vahel.
Kasutades sisendväärtuste kombinatsiooni aadressina, saab väljundiks vastava seose LUT-st. Mux-realisatsioon –
andmesisenditeks loogilised '0' & '1', juhtsisenditeks f.-ni muutujad. Mux-de ühendused loovad vastavad
loogilised seosed. I/O-blokid – reguleeritakse mux-de ning eripidi asetsevate dioodidega
FPGA arhitektuurid:
Sümmeetriline – maatriks
Row-based – ridades
Sea of gates – loogikablokid tihedalt üksteise kõrval
Hierarhiline
FPGA-del põhineva riistvara programmeerimine
Riistvara kirjeldus (Boole'i f.-nid) --> Loogiline optimeerimine & minimeerimine --> Ülesande jaotamine
(Technology mapping) --> Osaülesannete paigutus --> Trasseerimine --> Programmeerimine-konfigureerimine
































































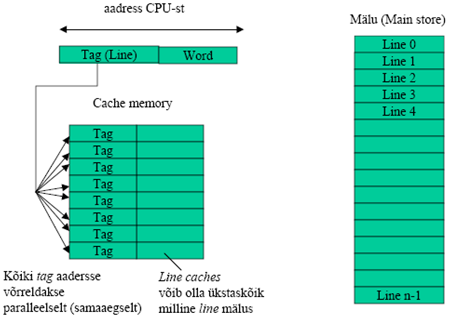
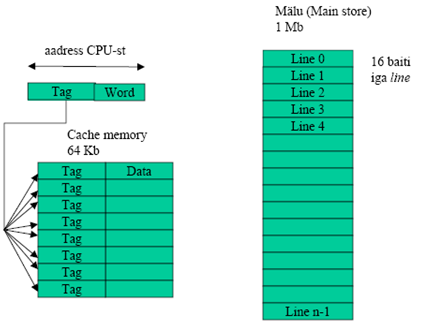
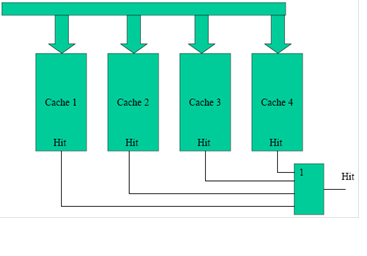
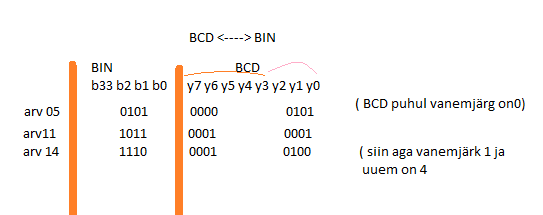
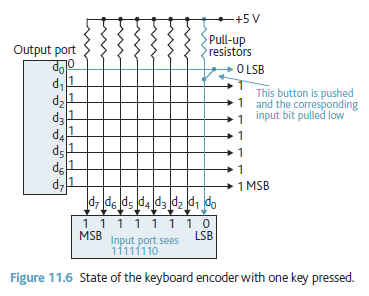
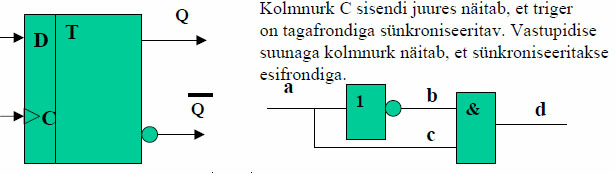
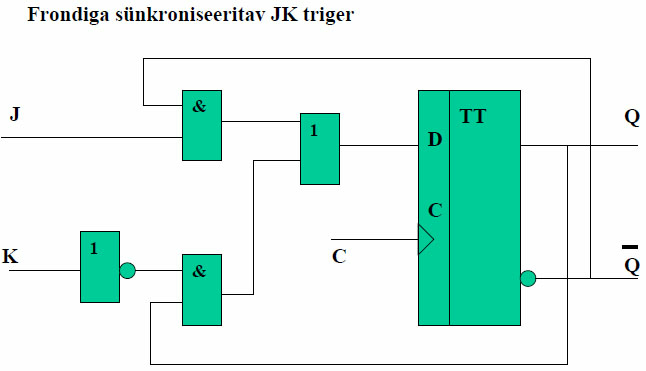
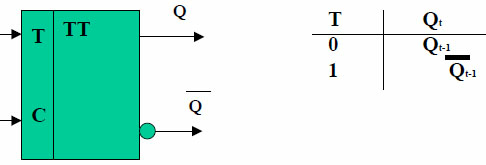
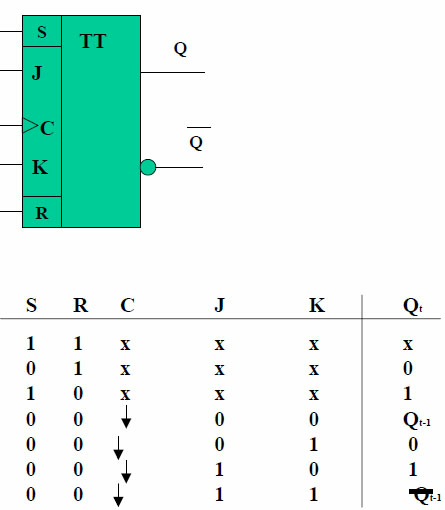
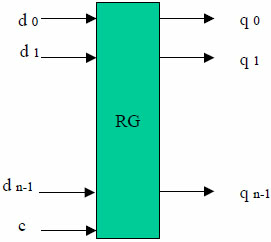
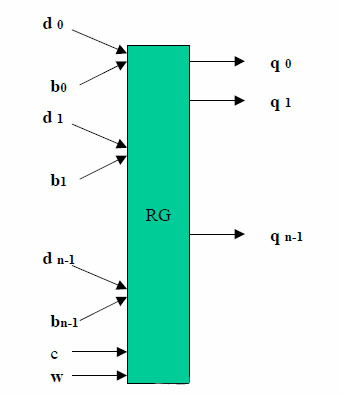
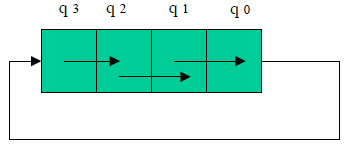
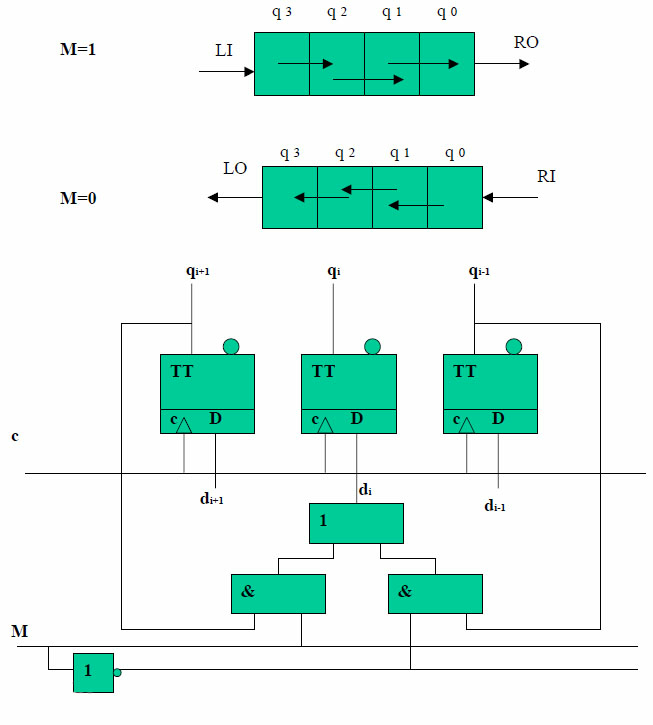
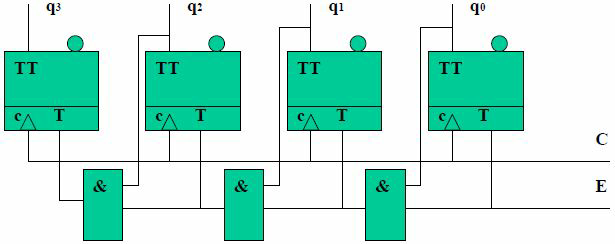
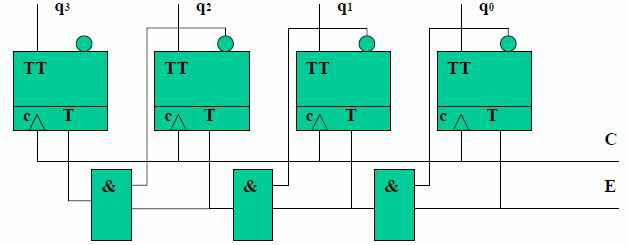
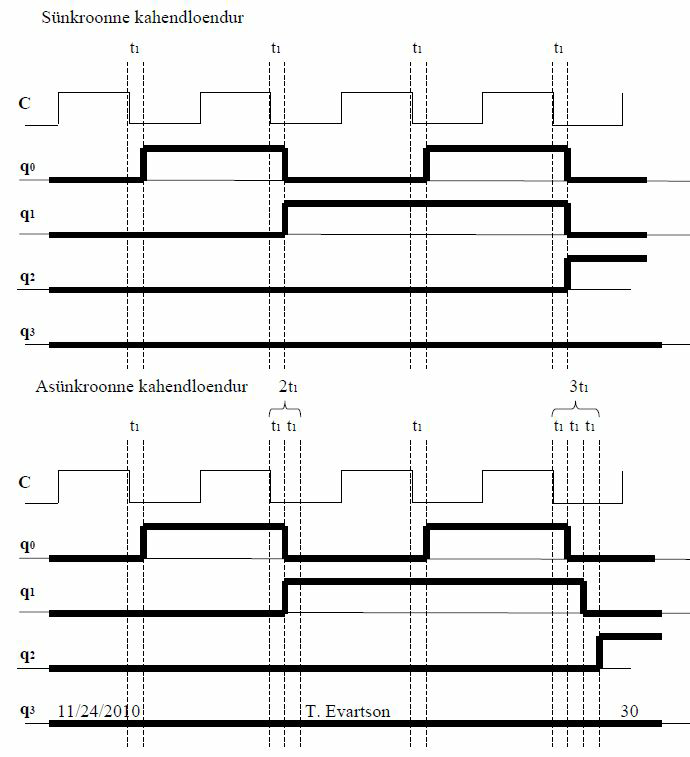
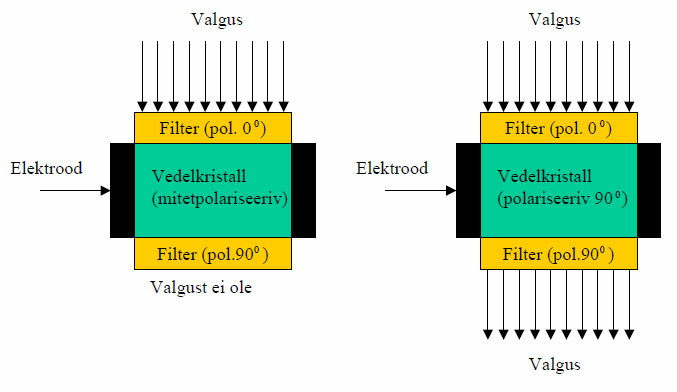
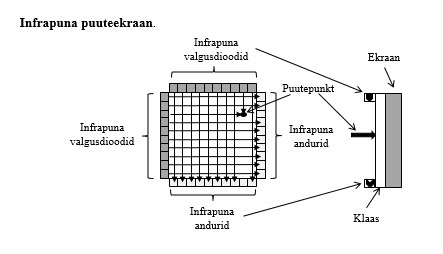
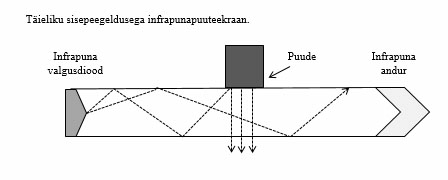
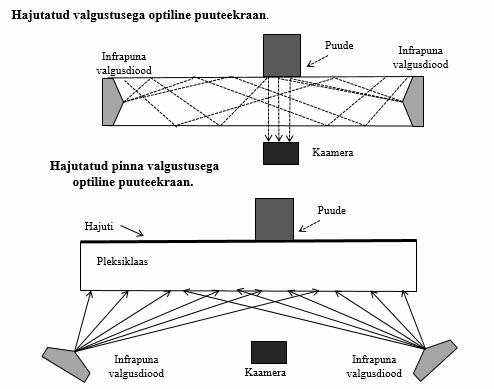
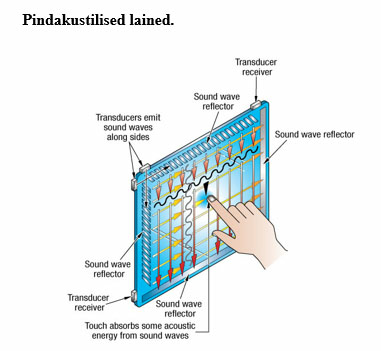
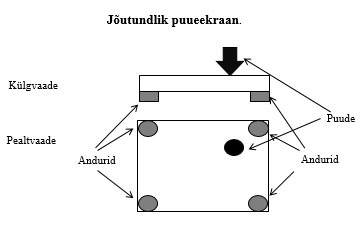
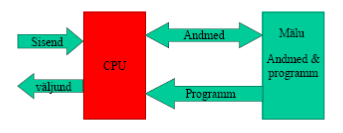
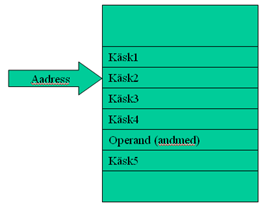
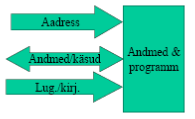

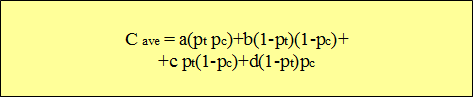
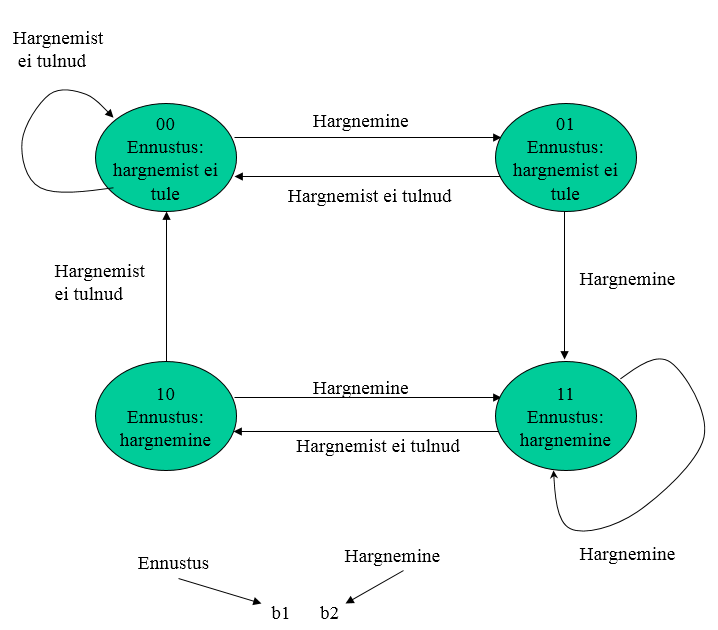
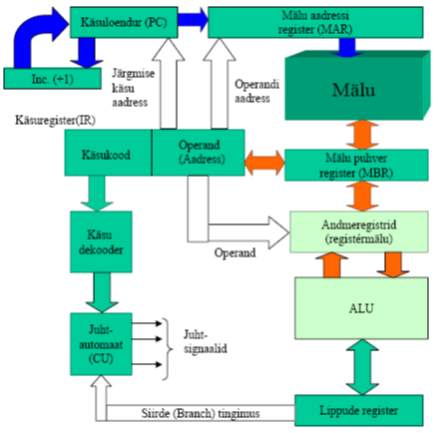
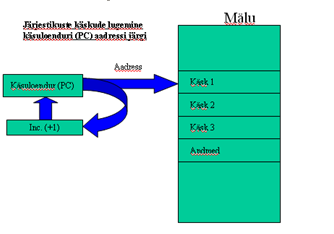
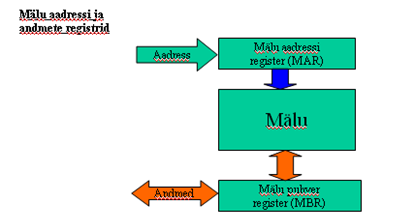
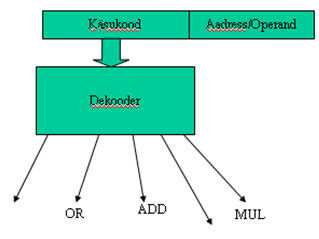
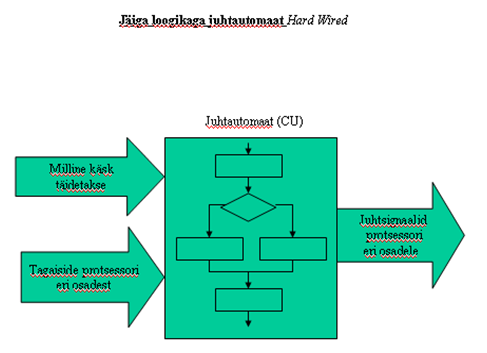
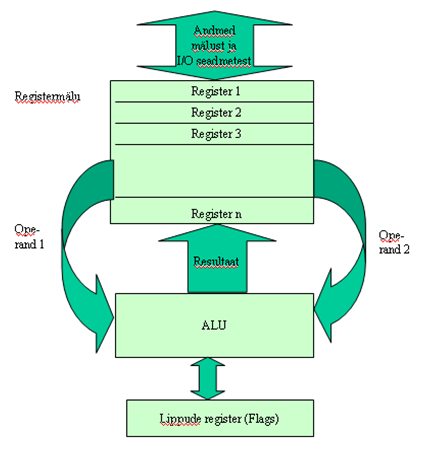
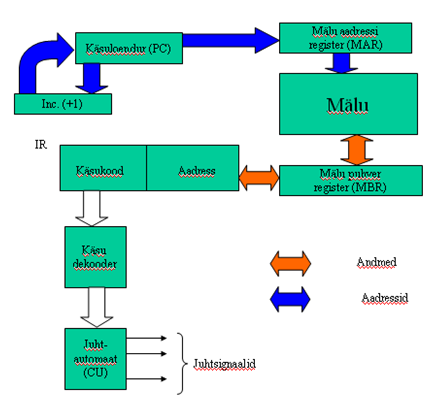
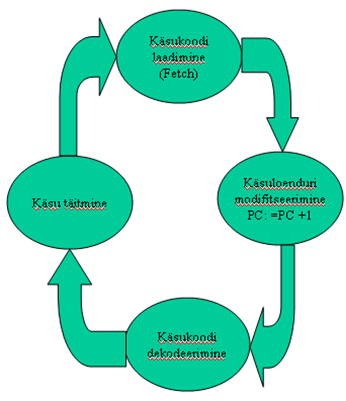
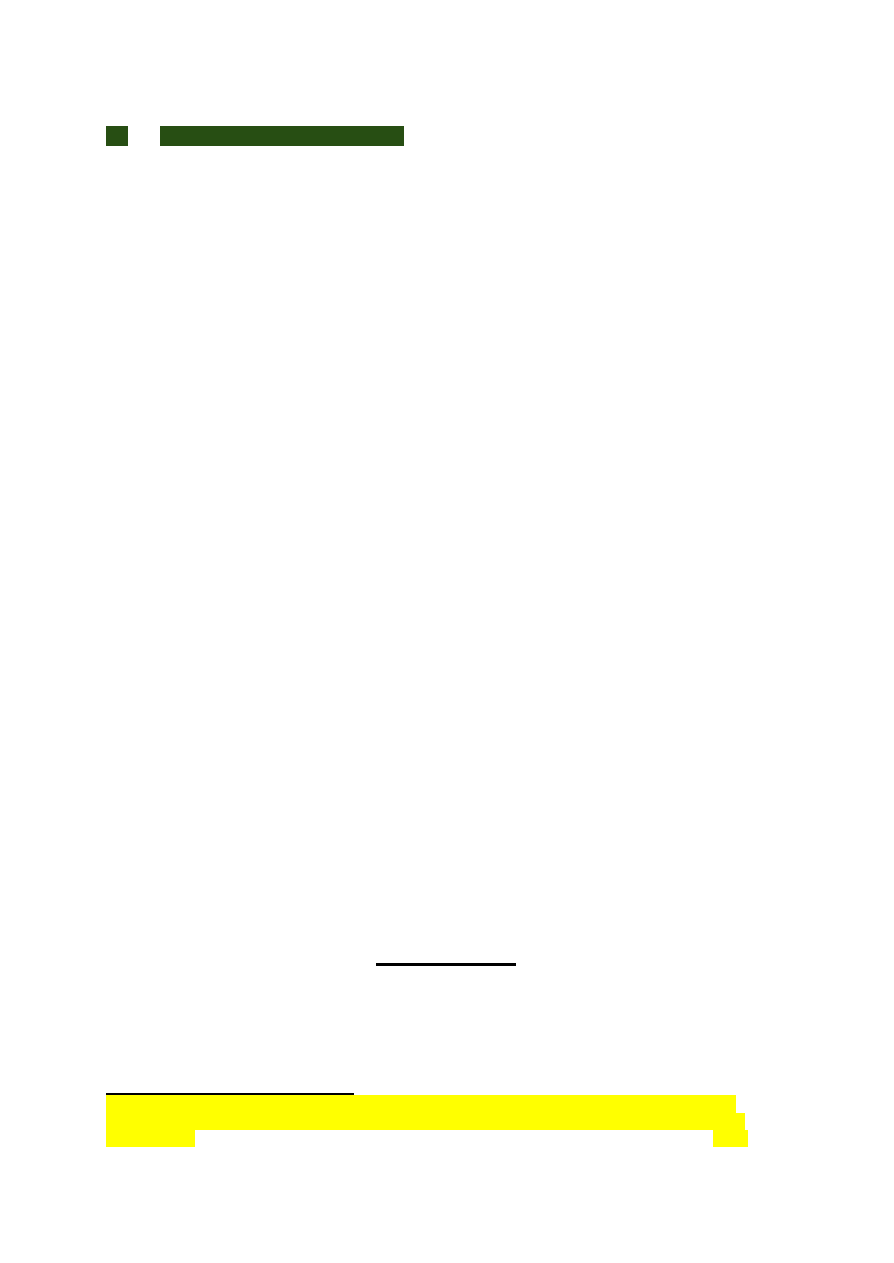
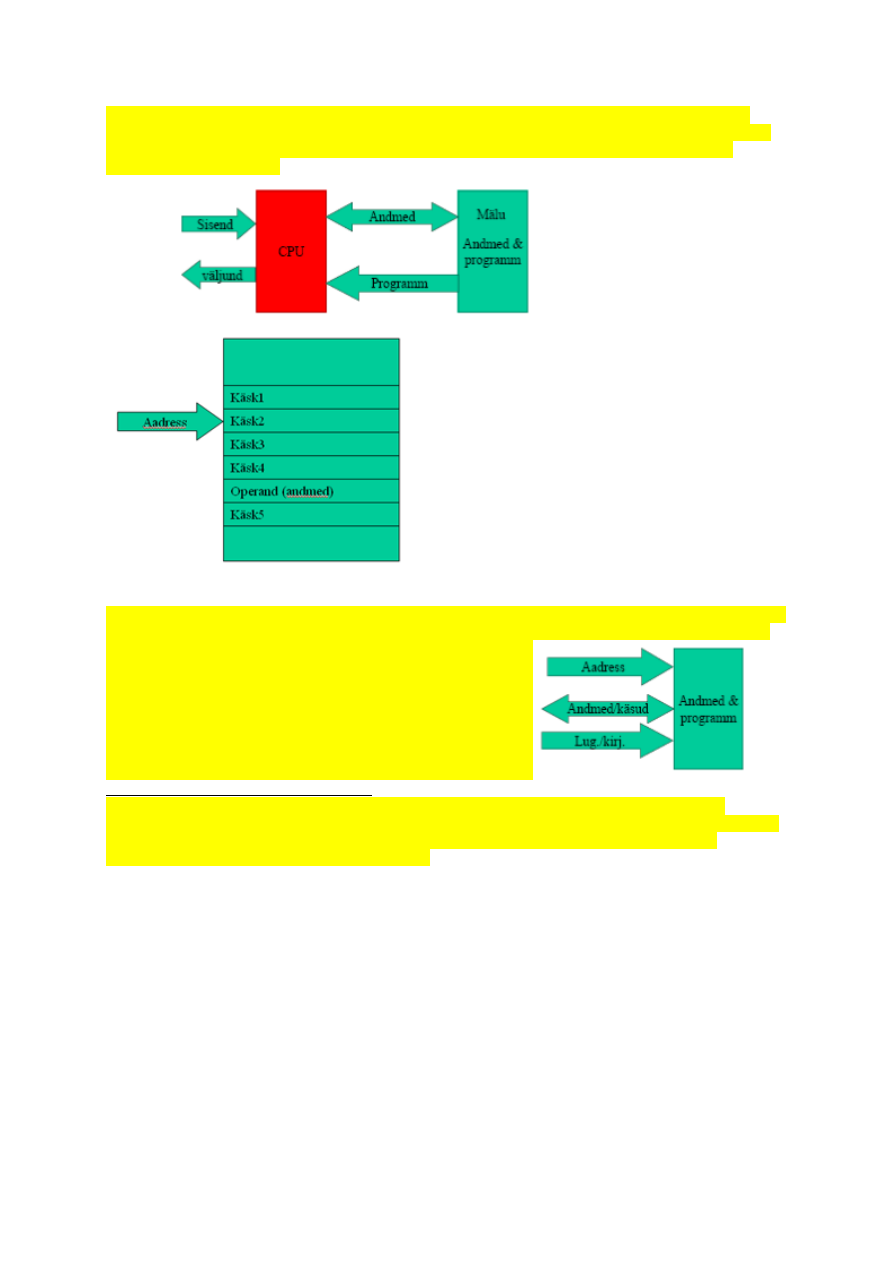
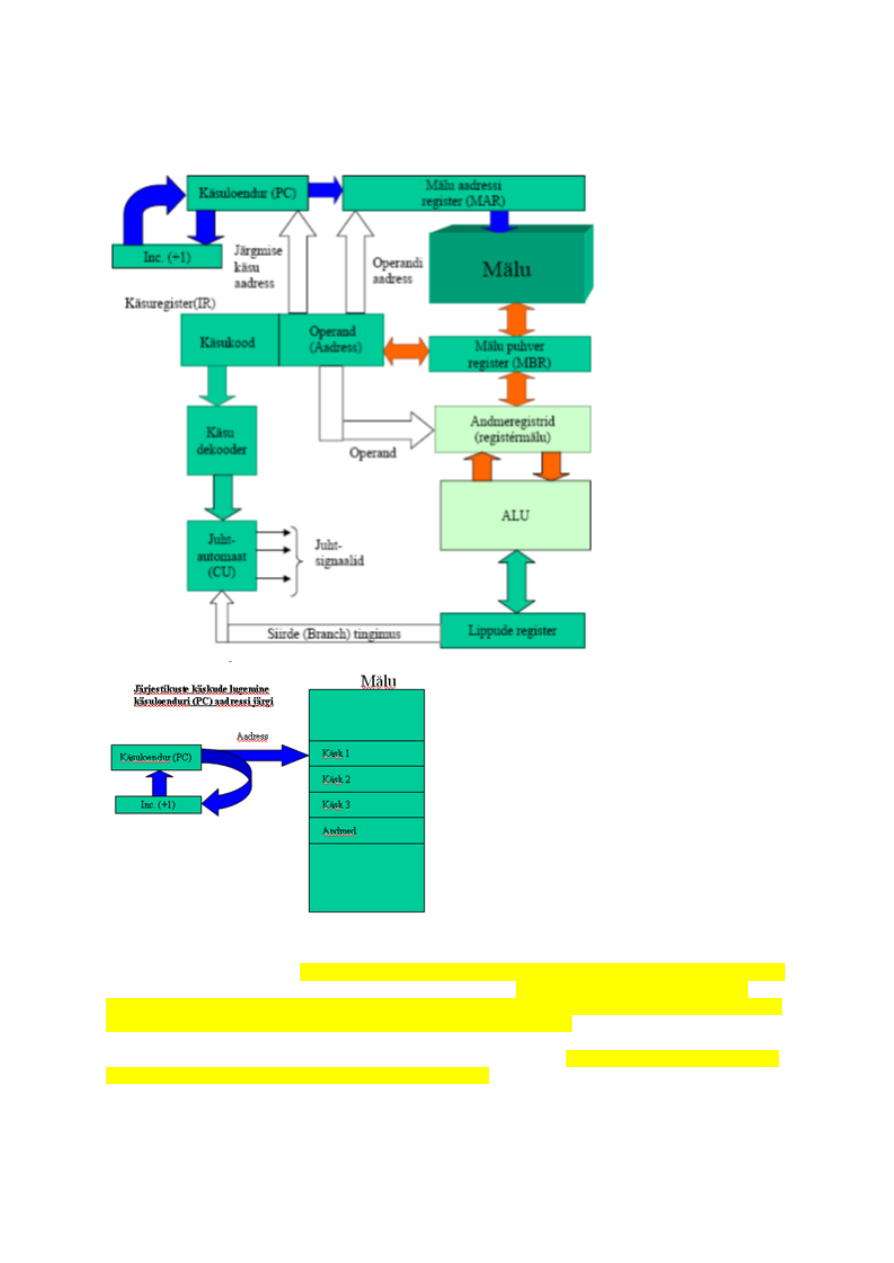
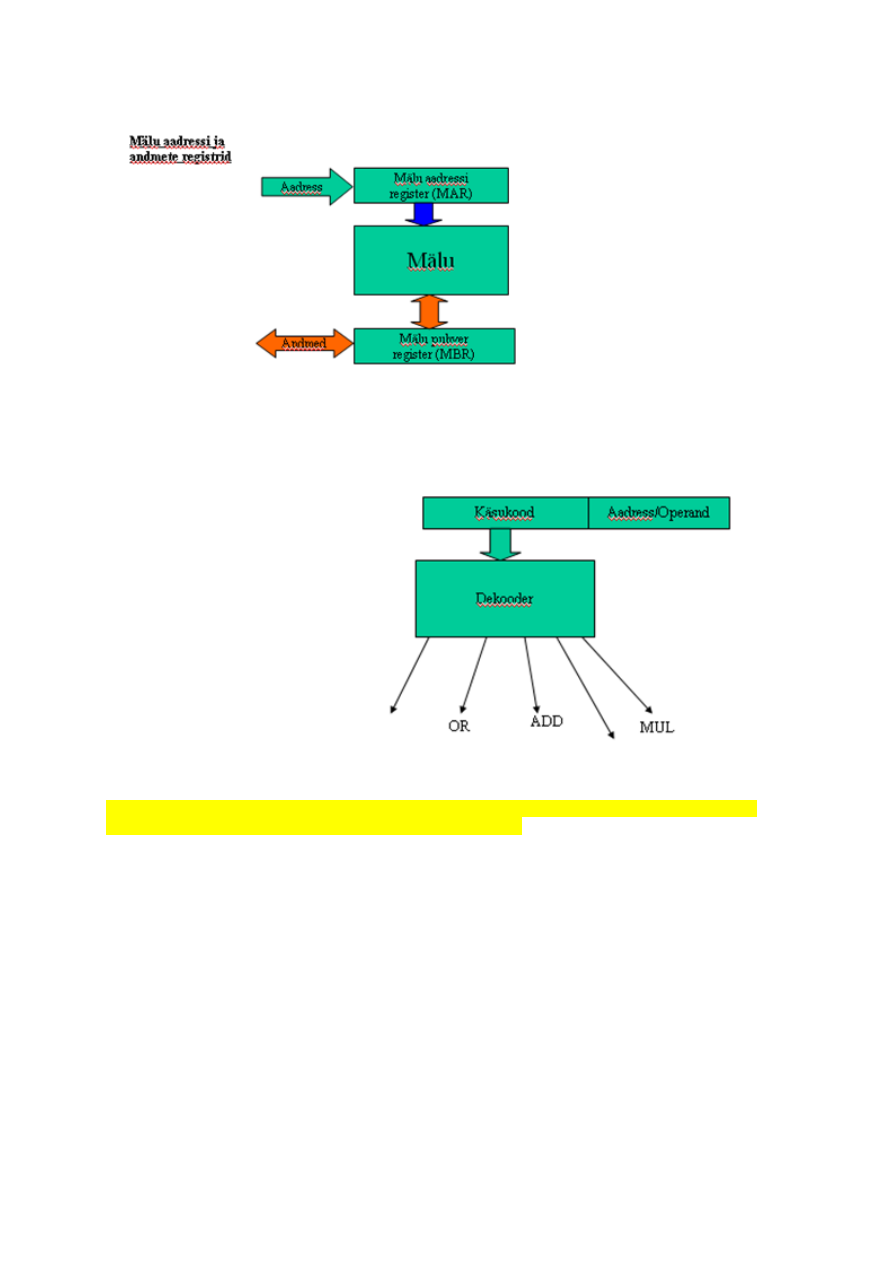
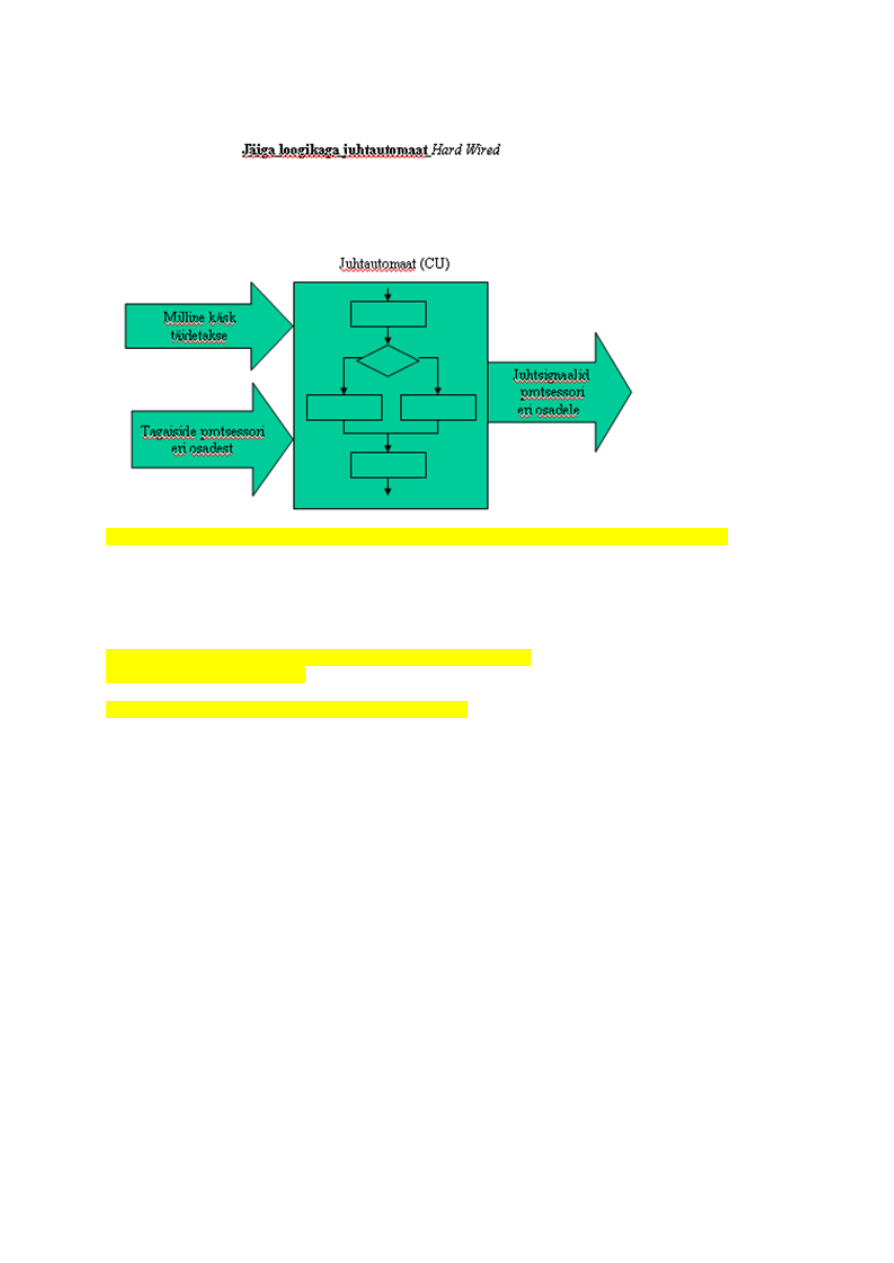
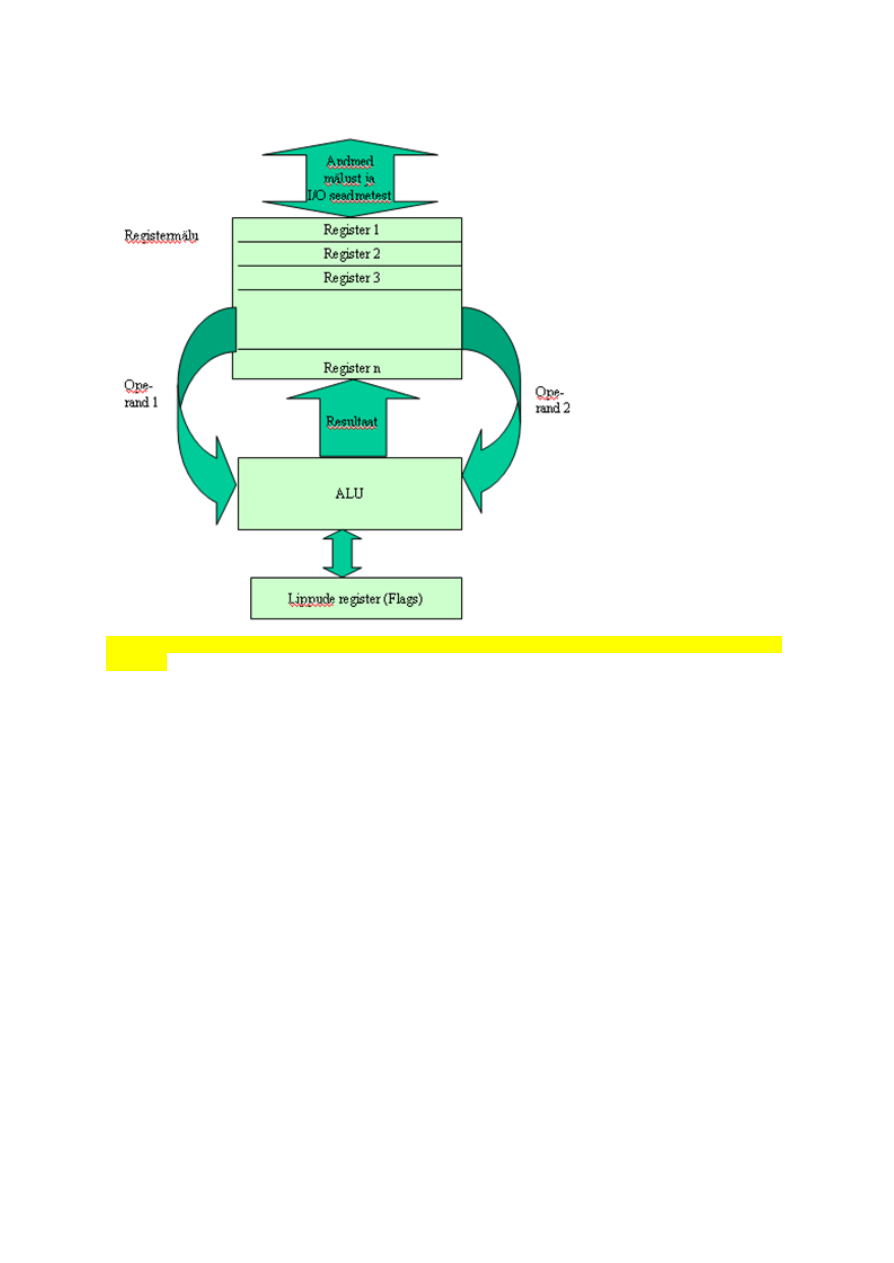
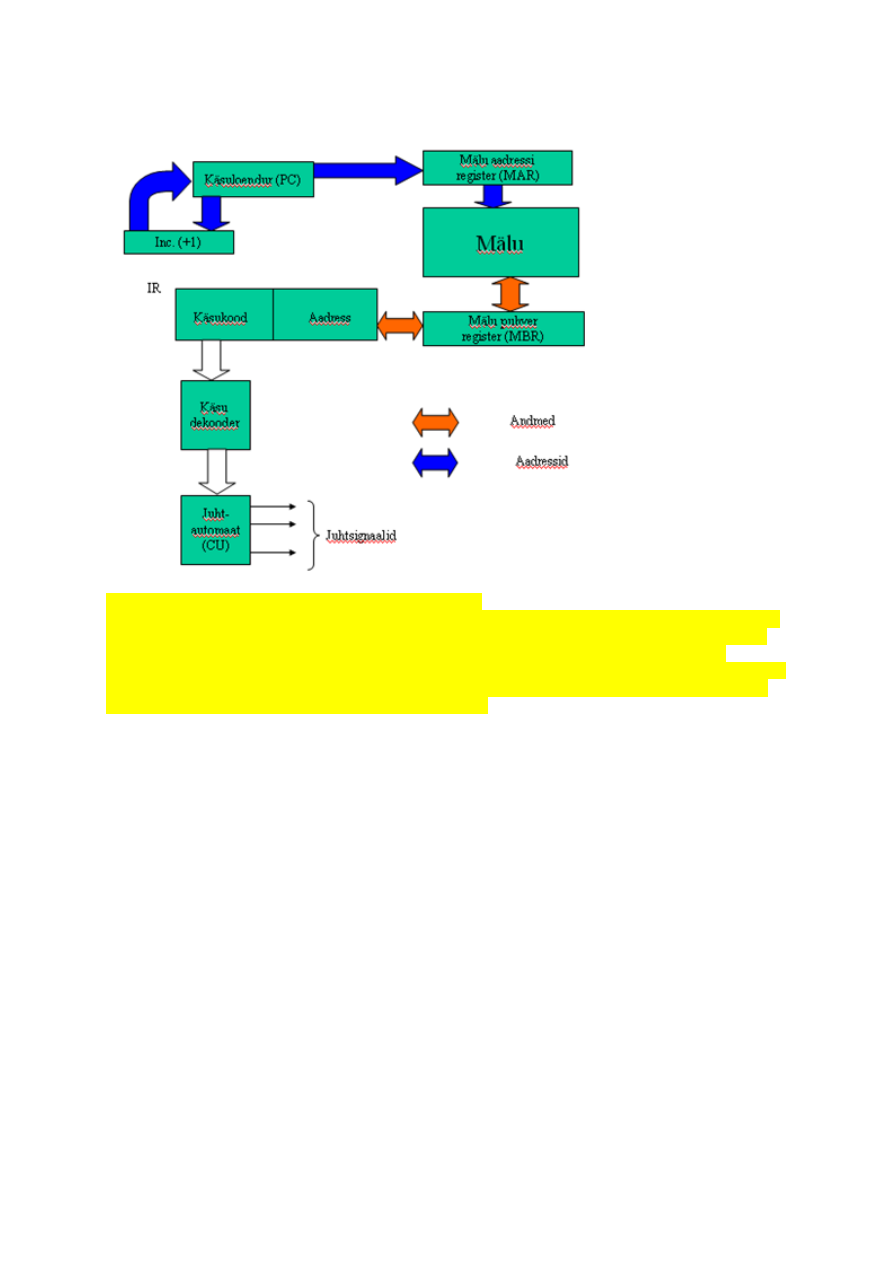
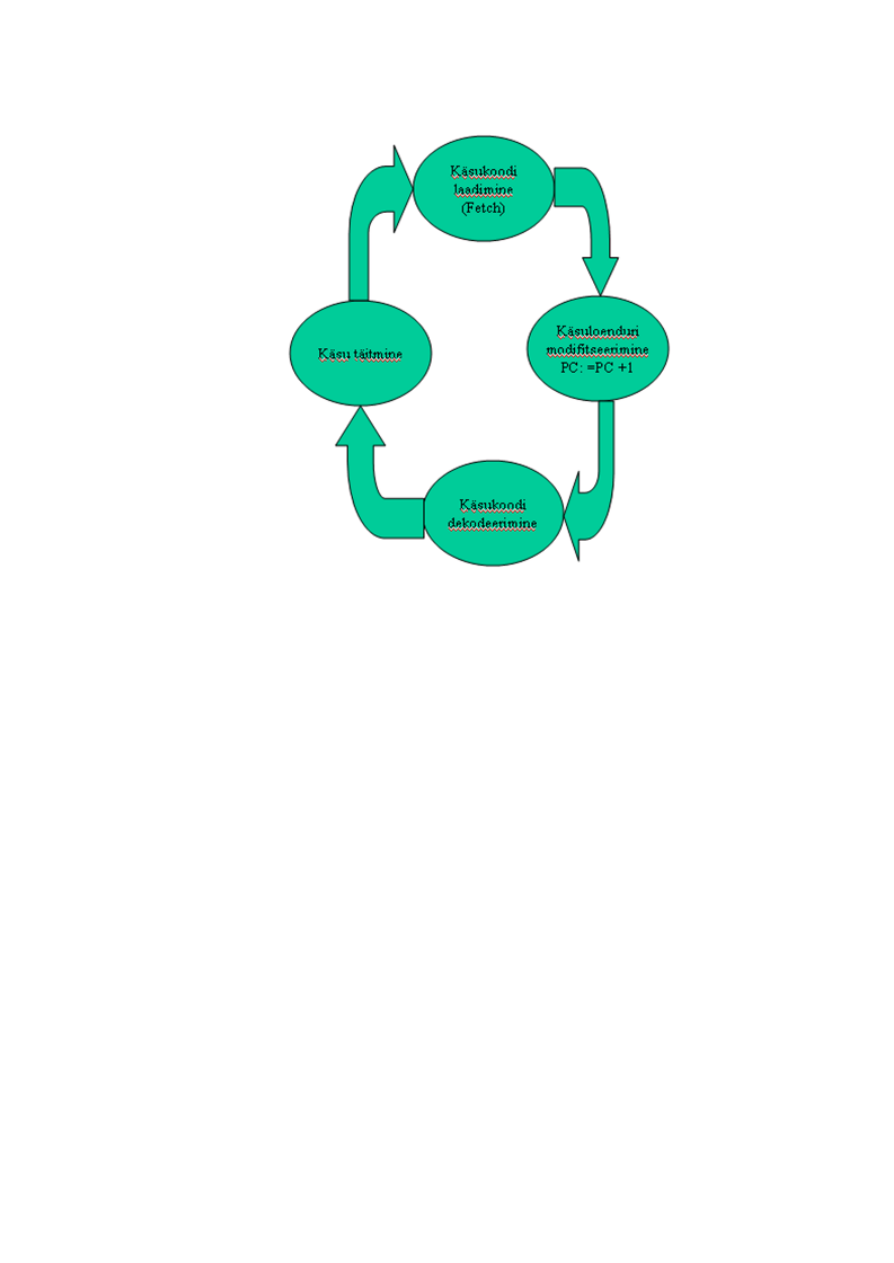


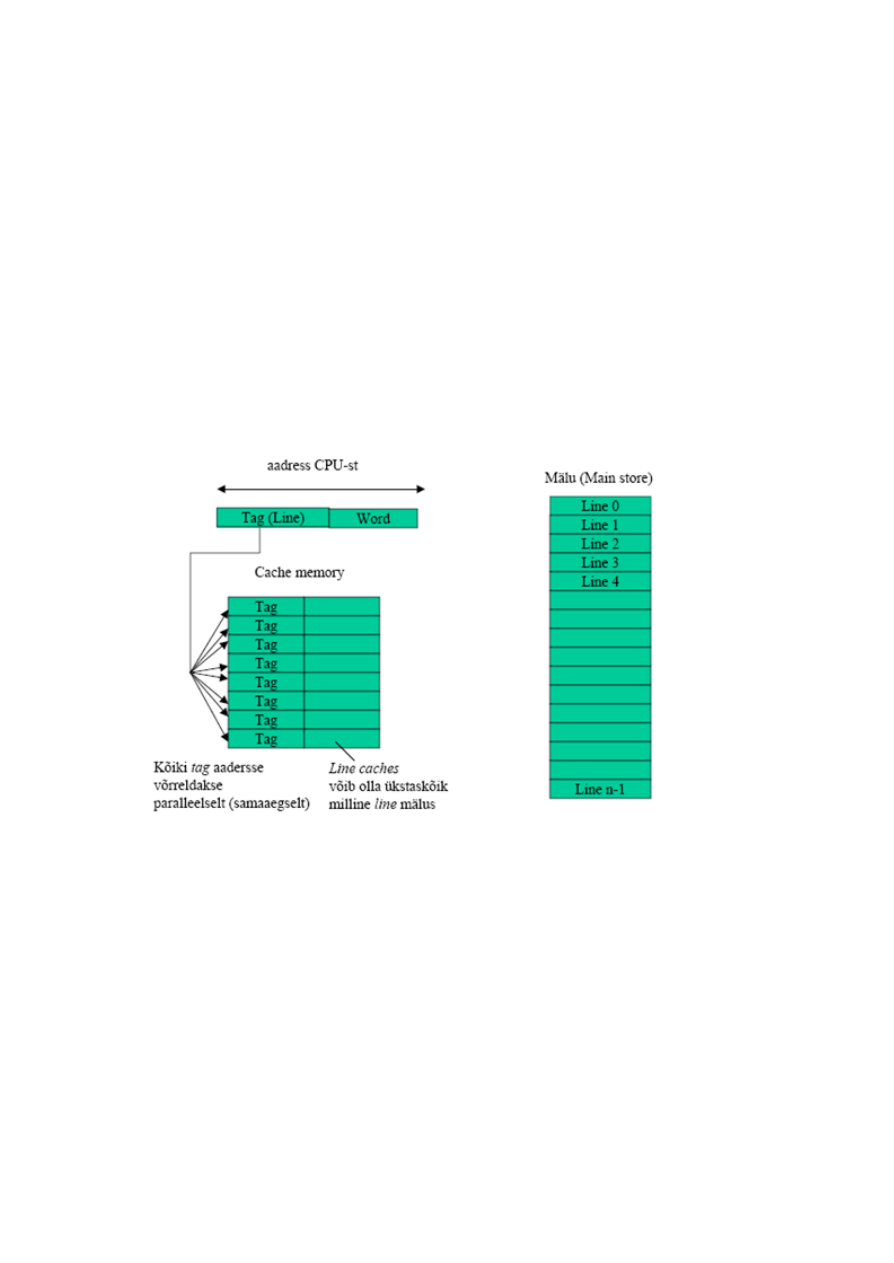
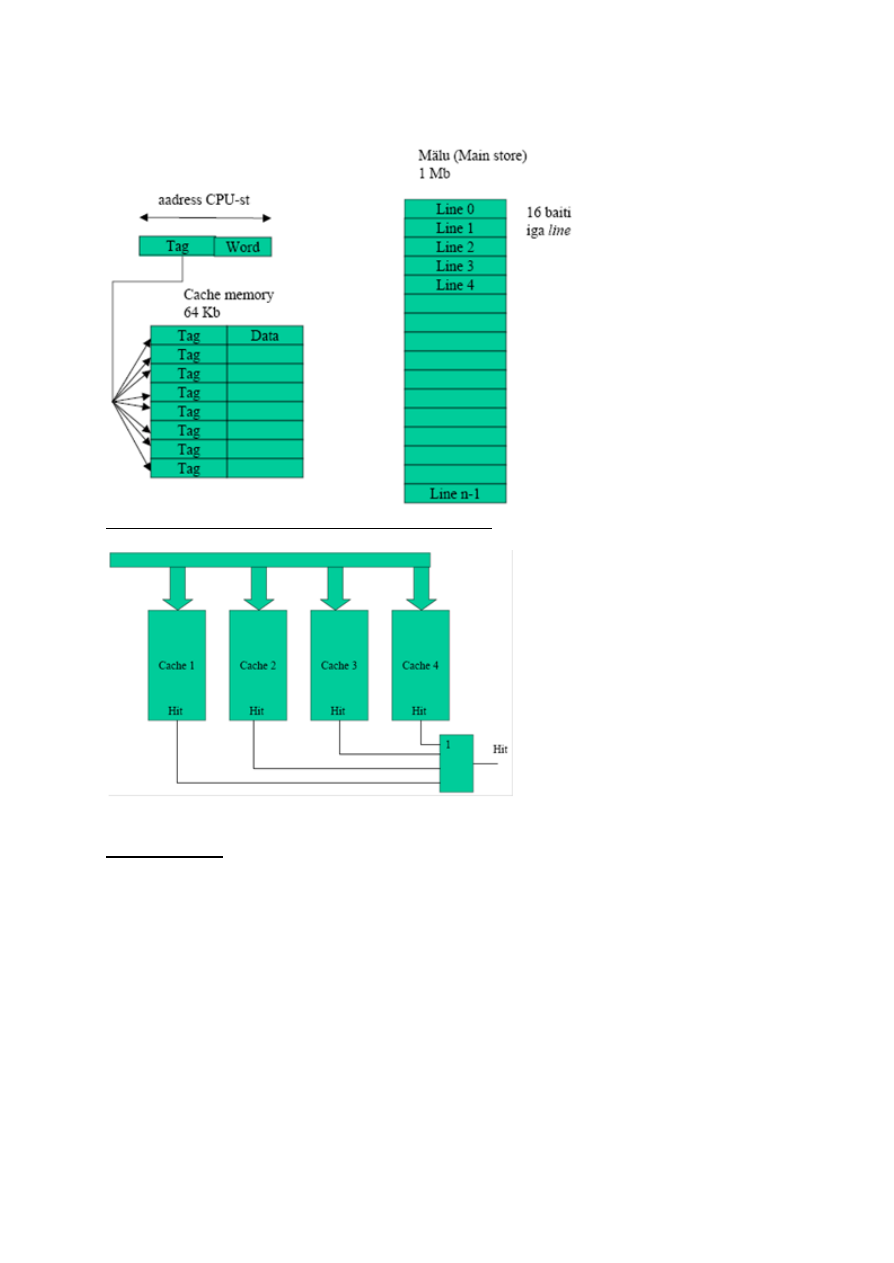
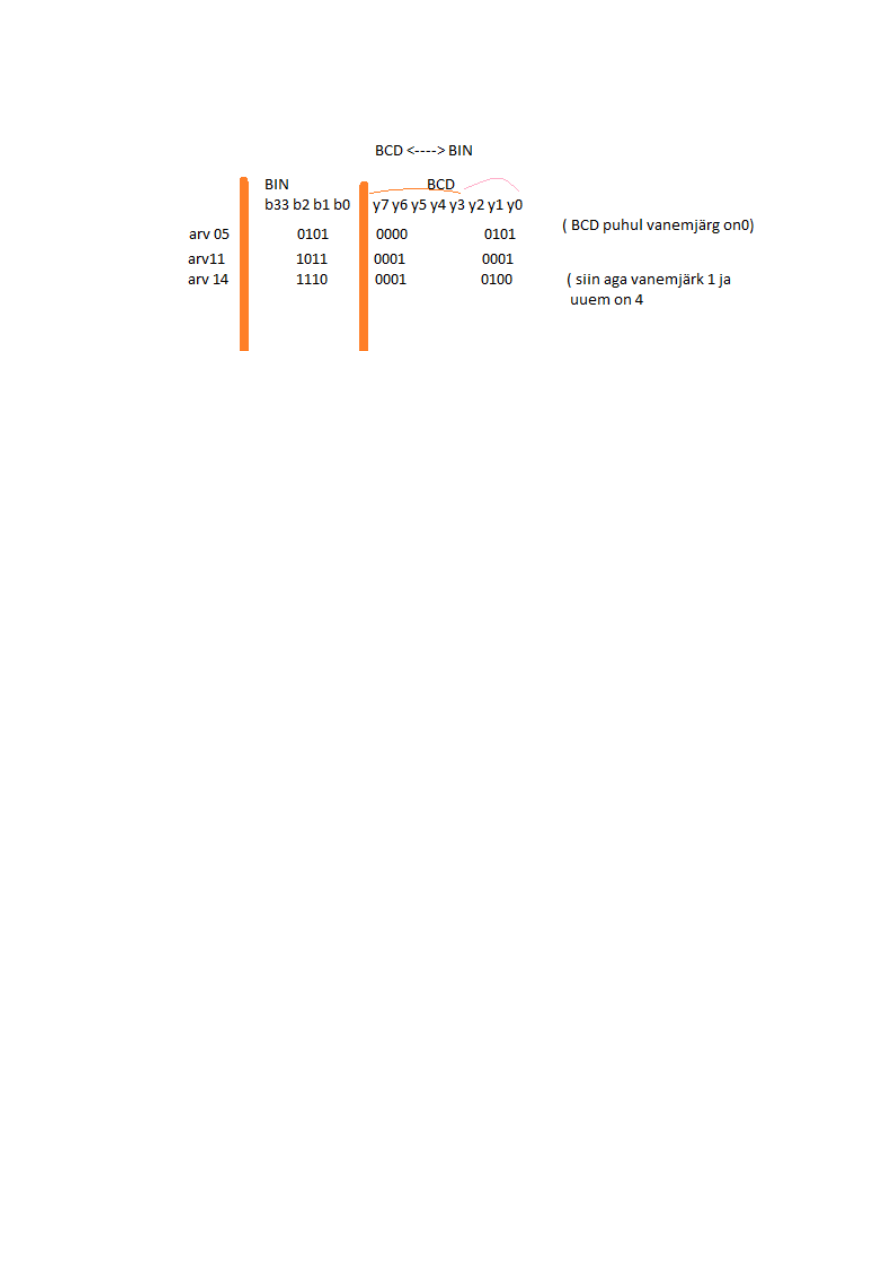
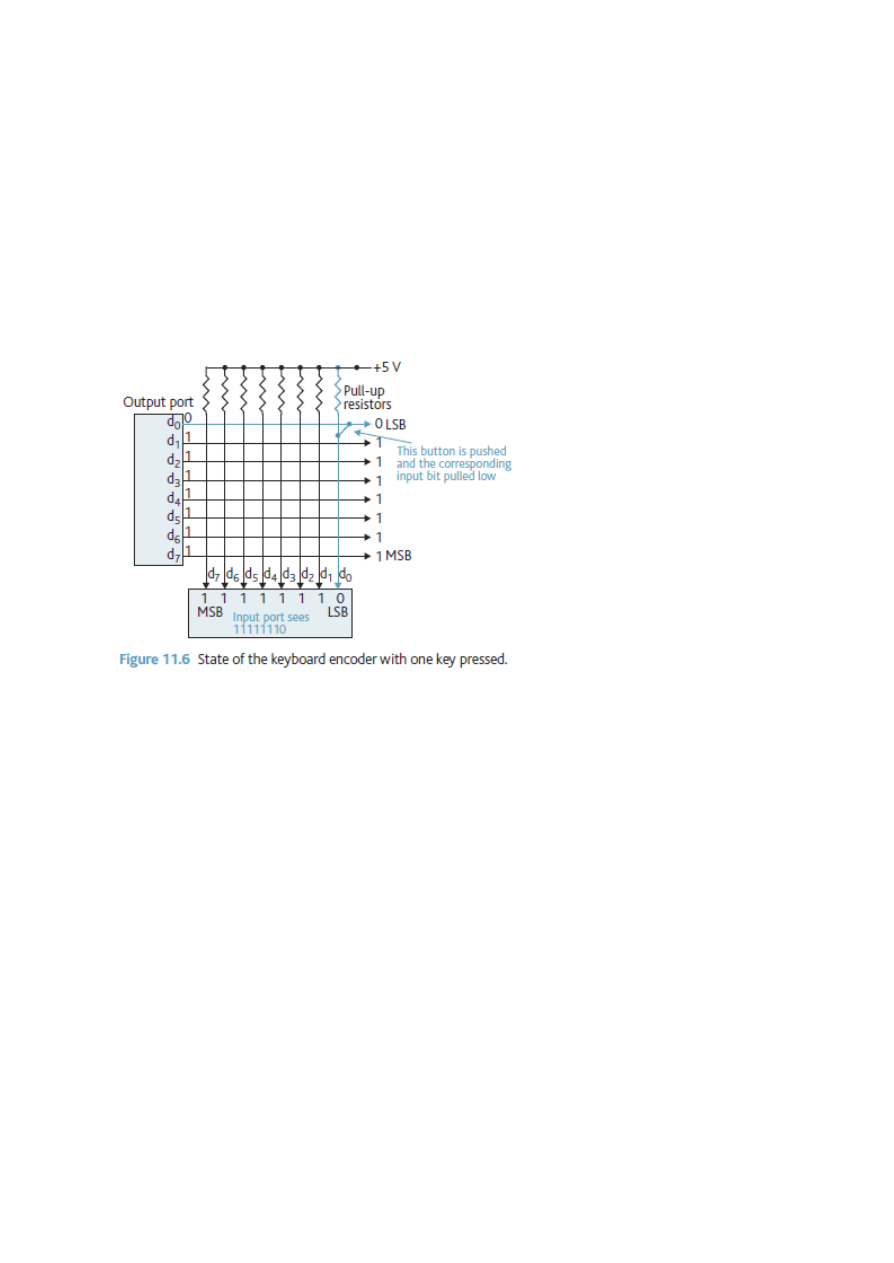

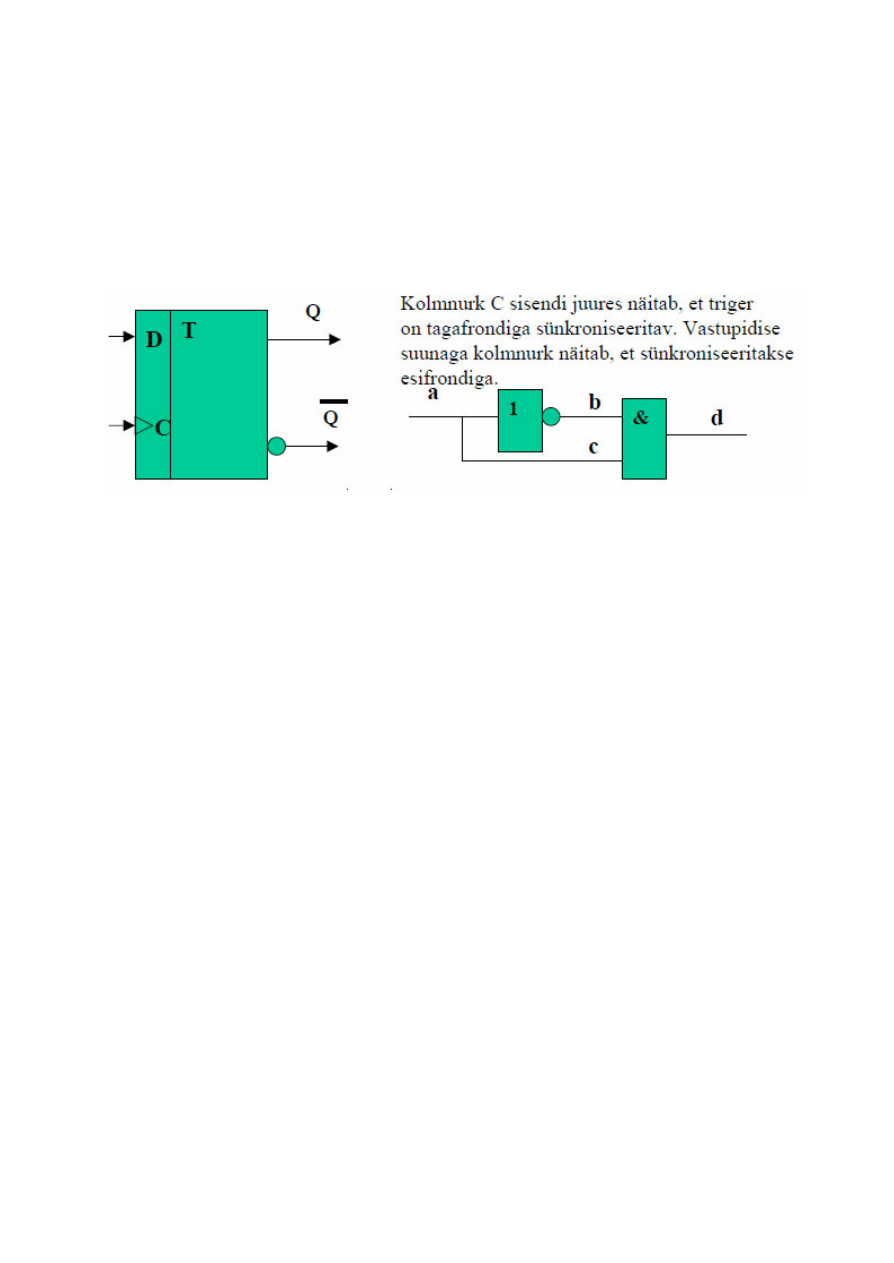
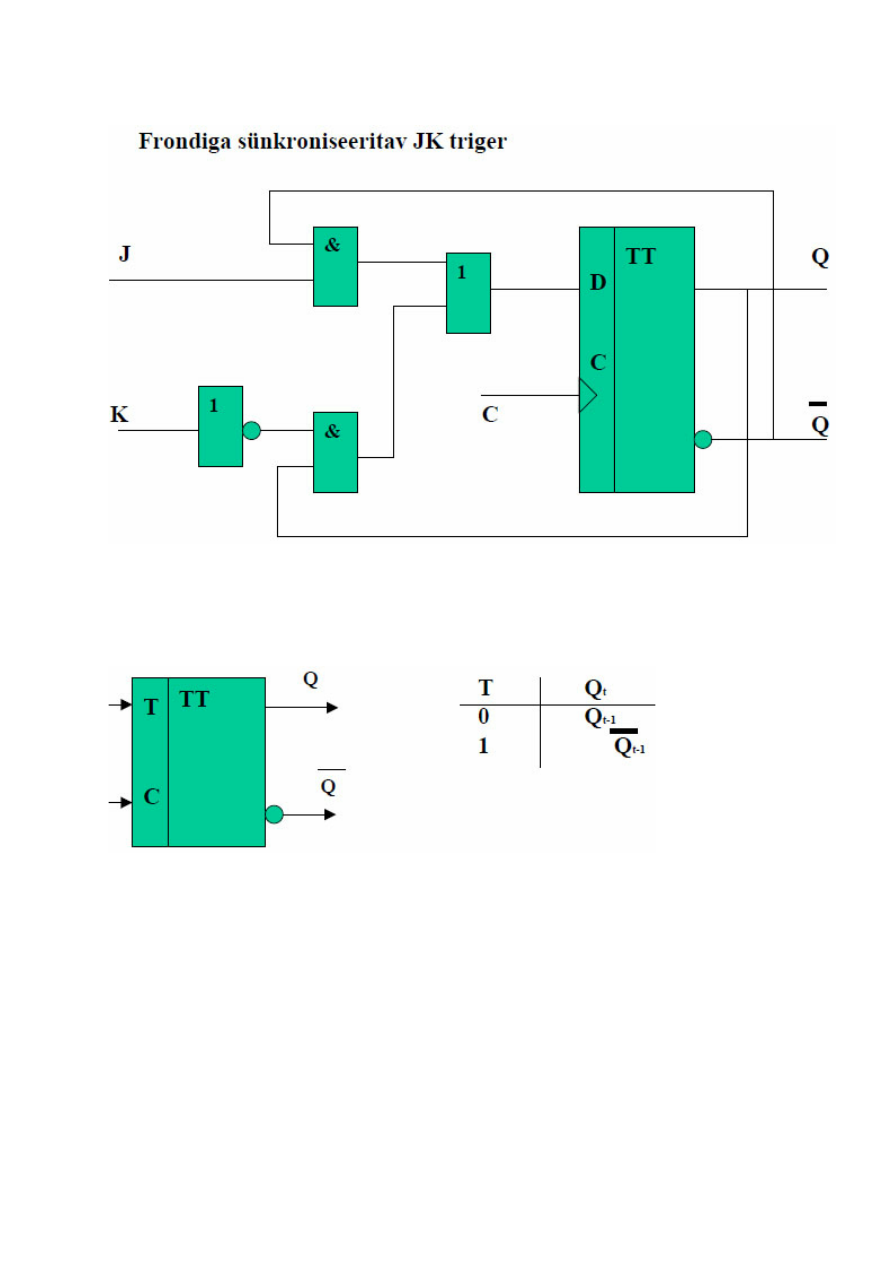
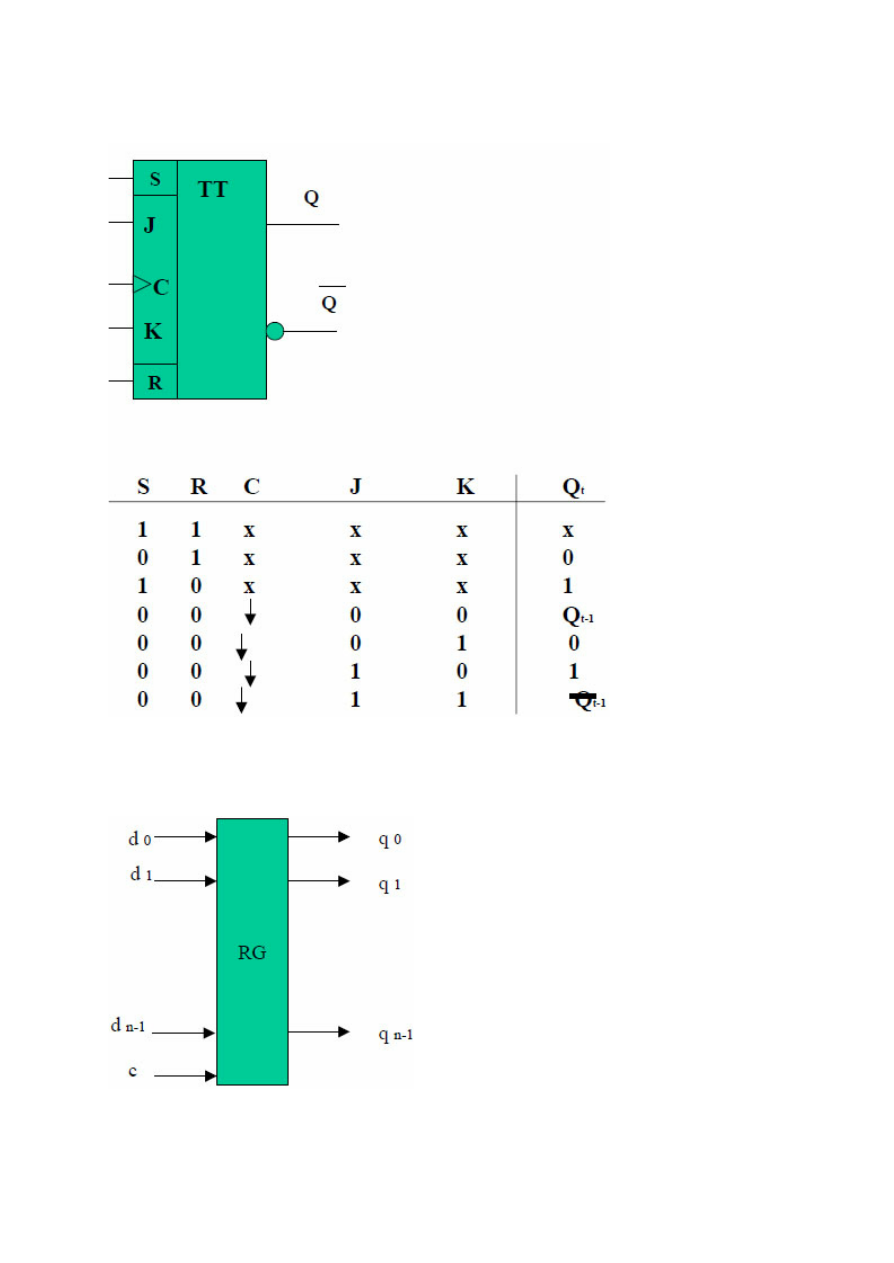
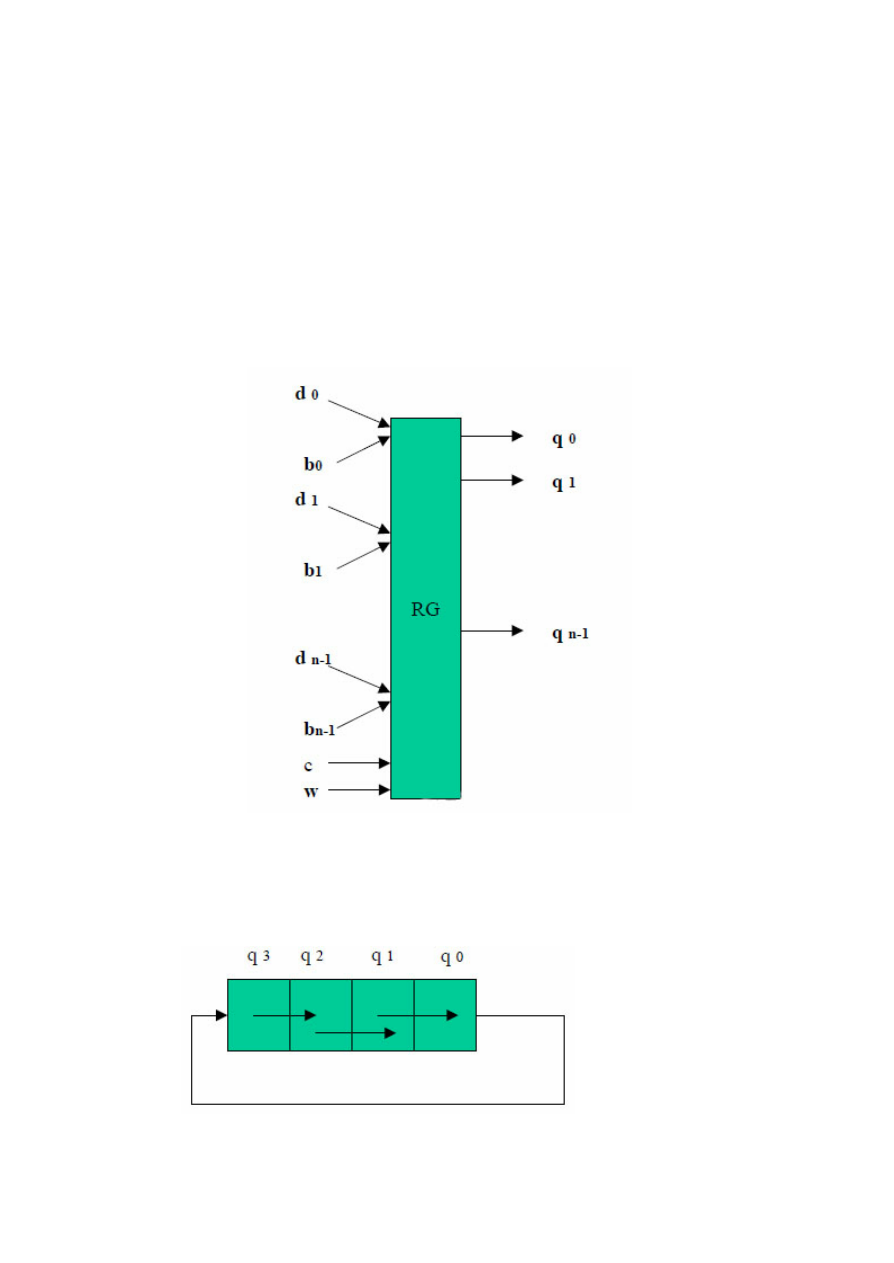
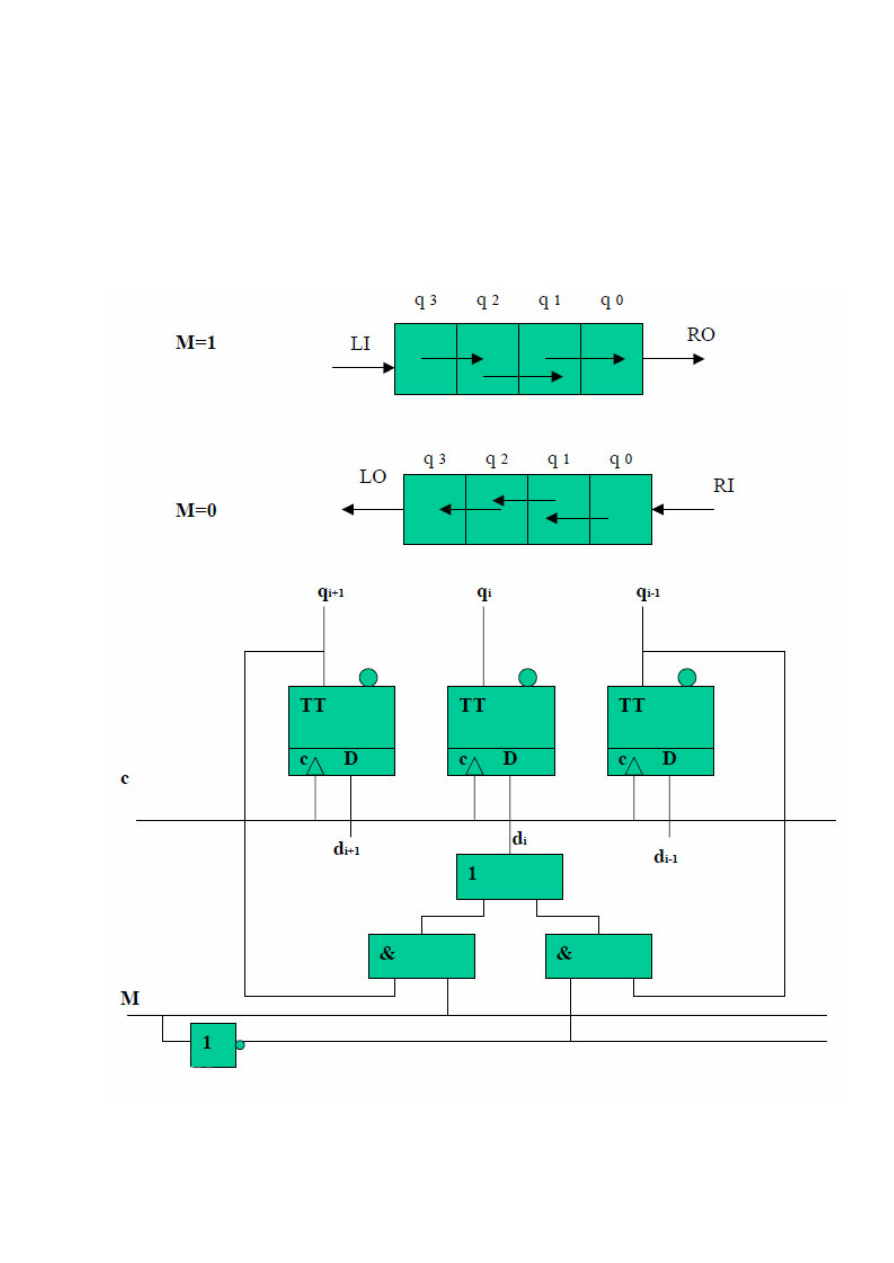
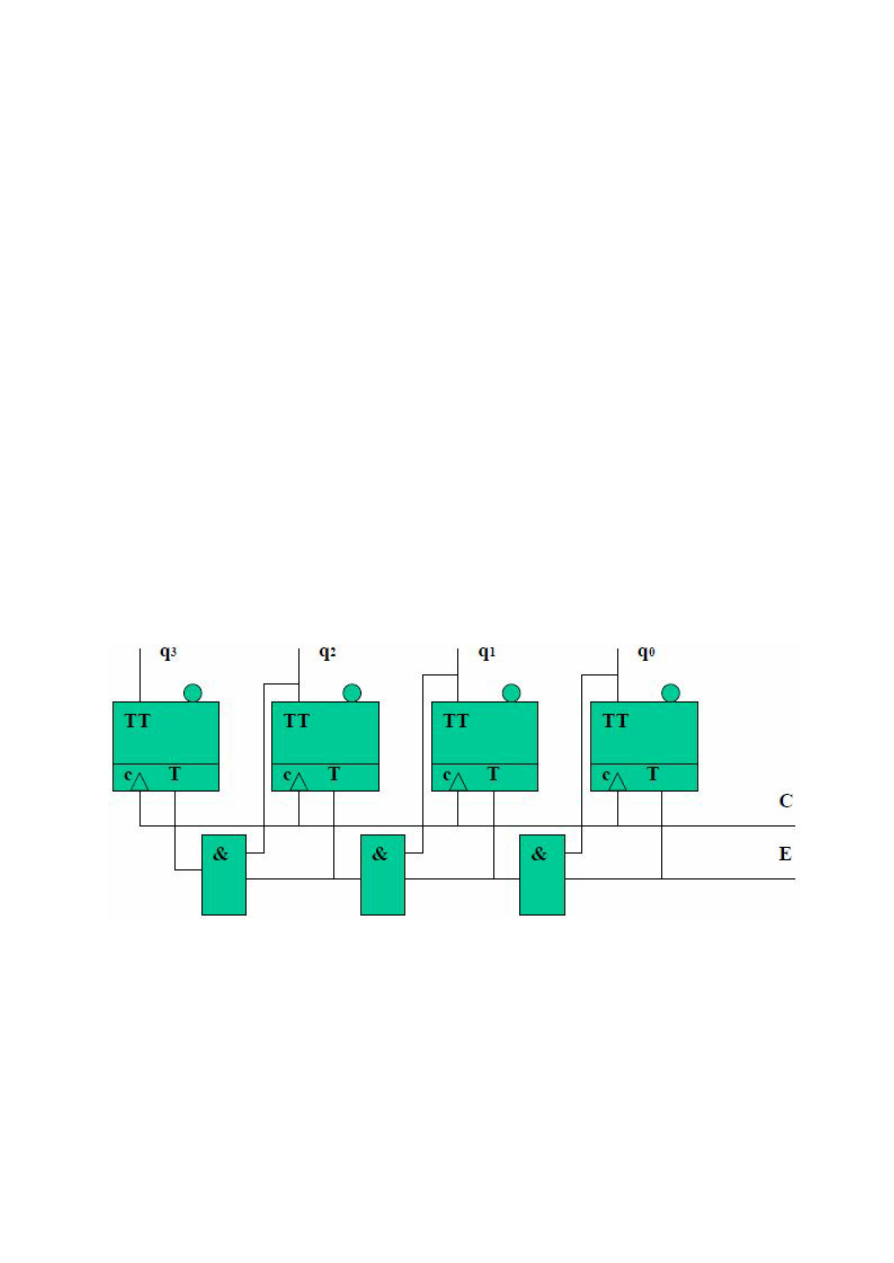
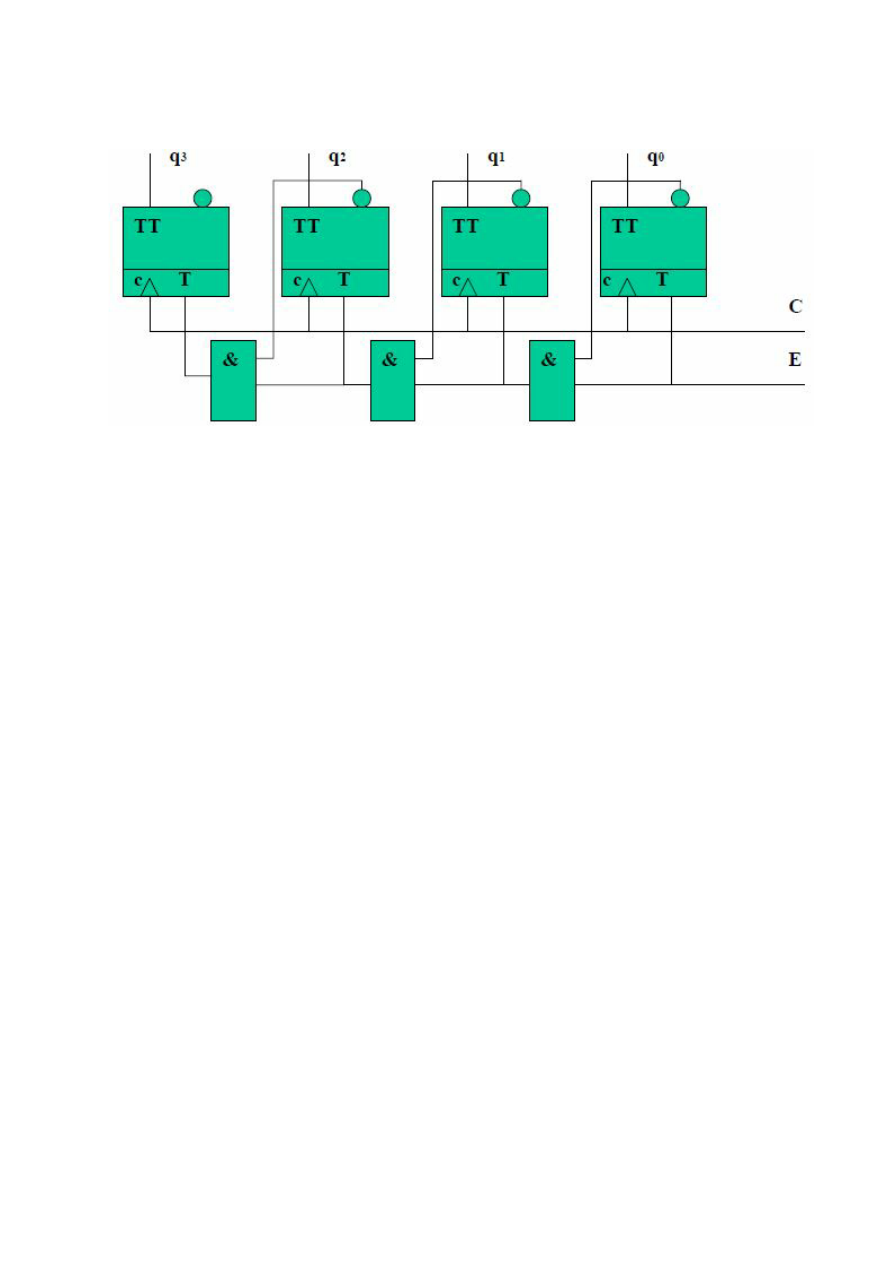
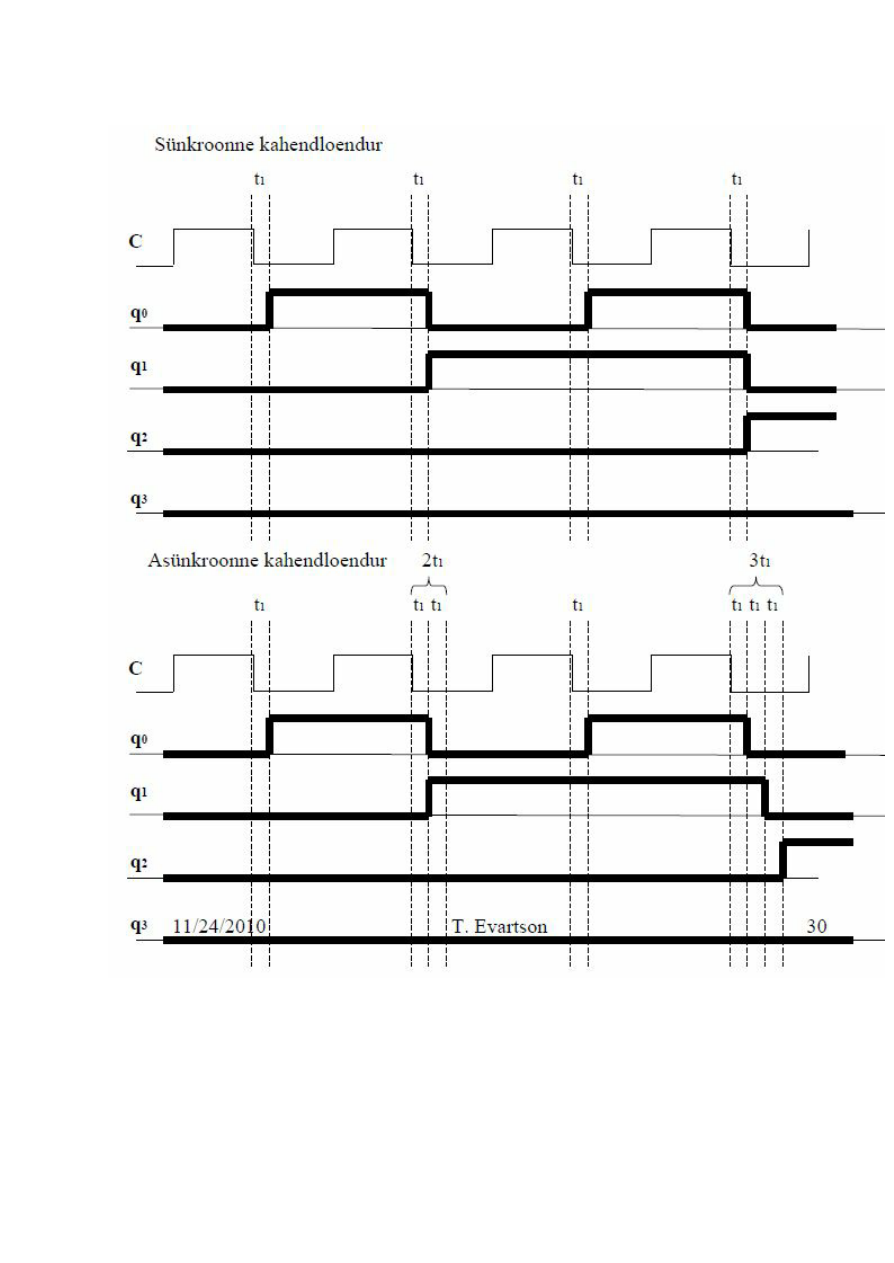
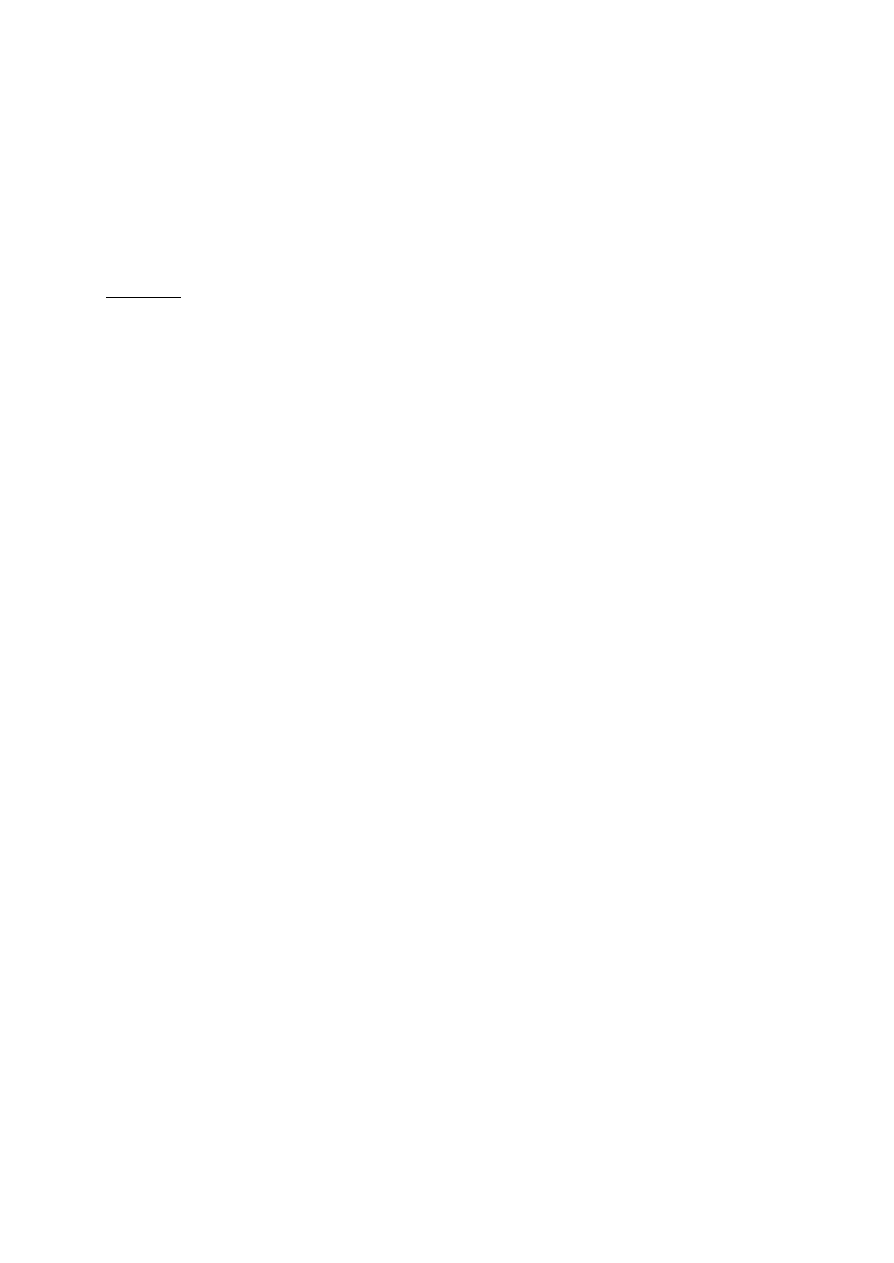
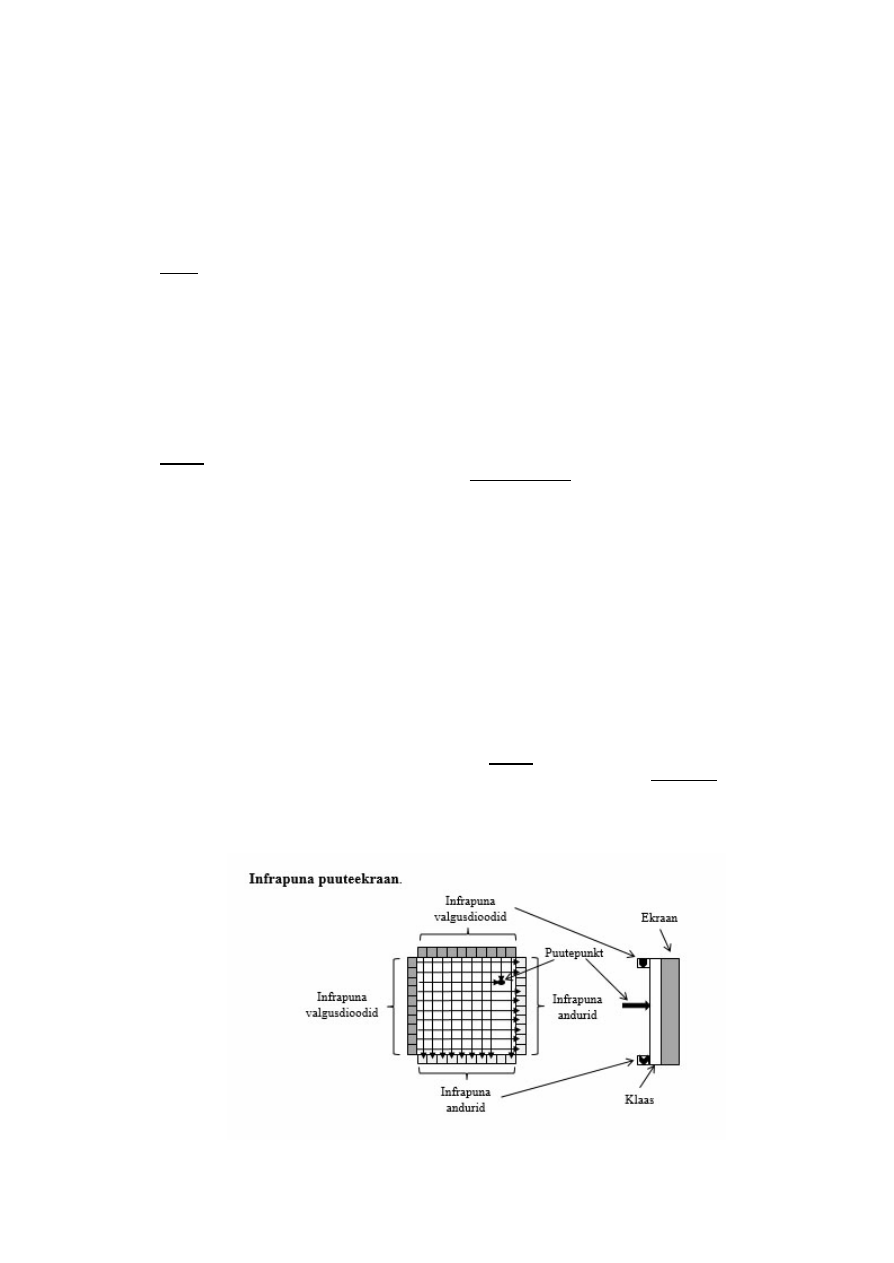
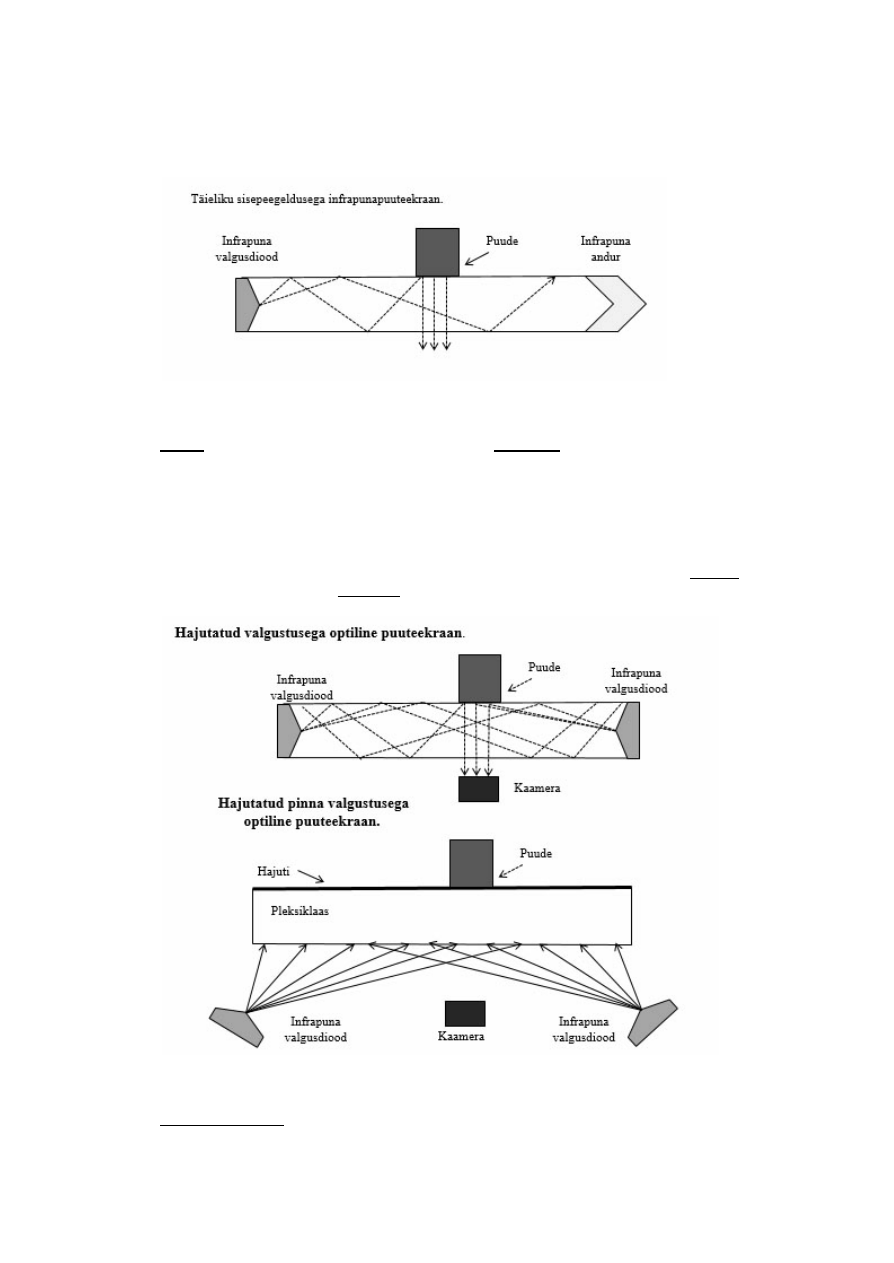
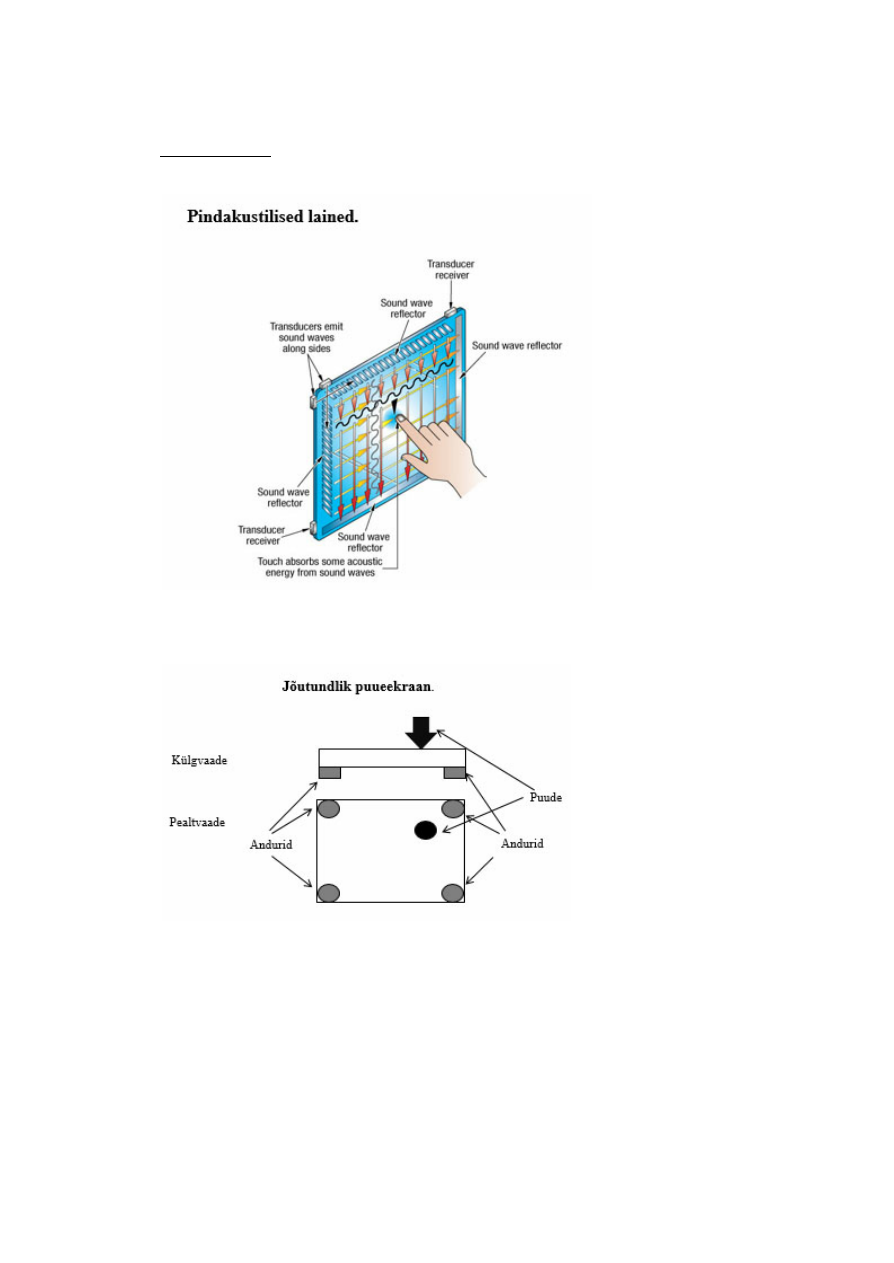
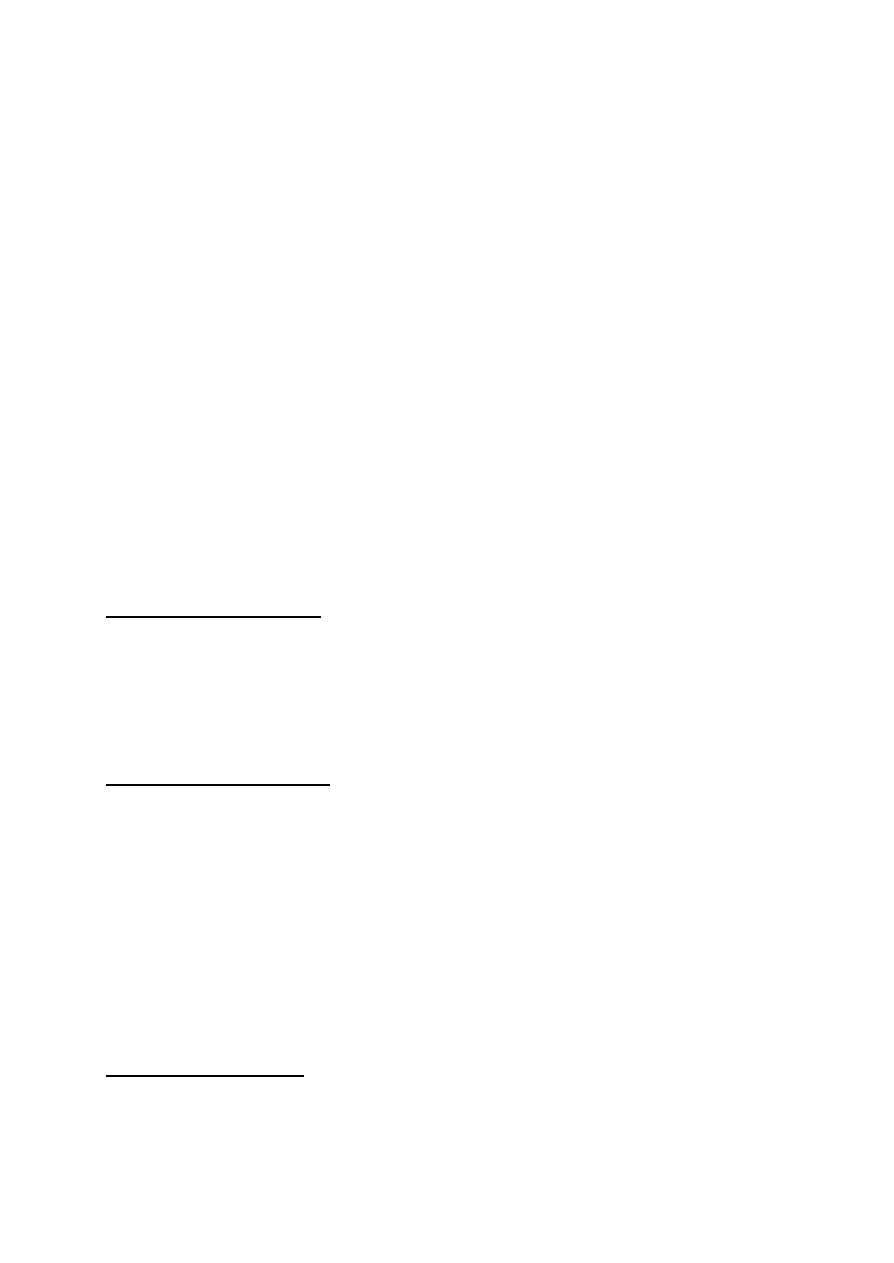
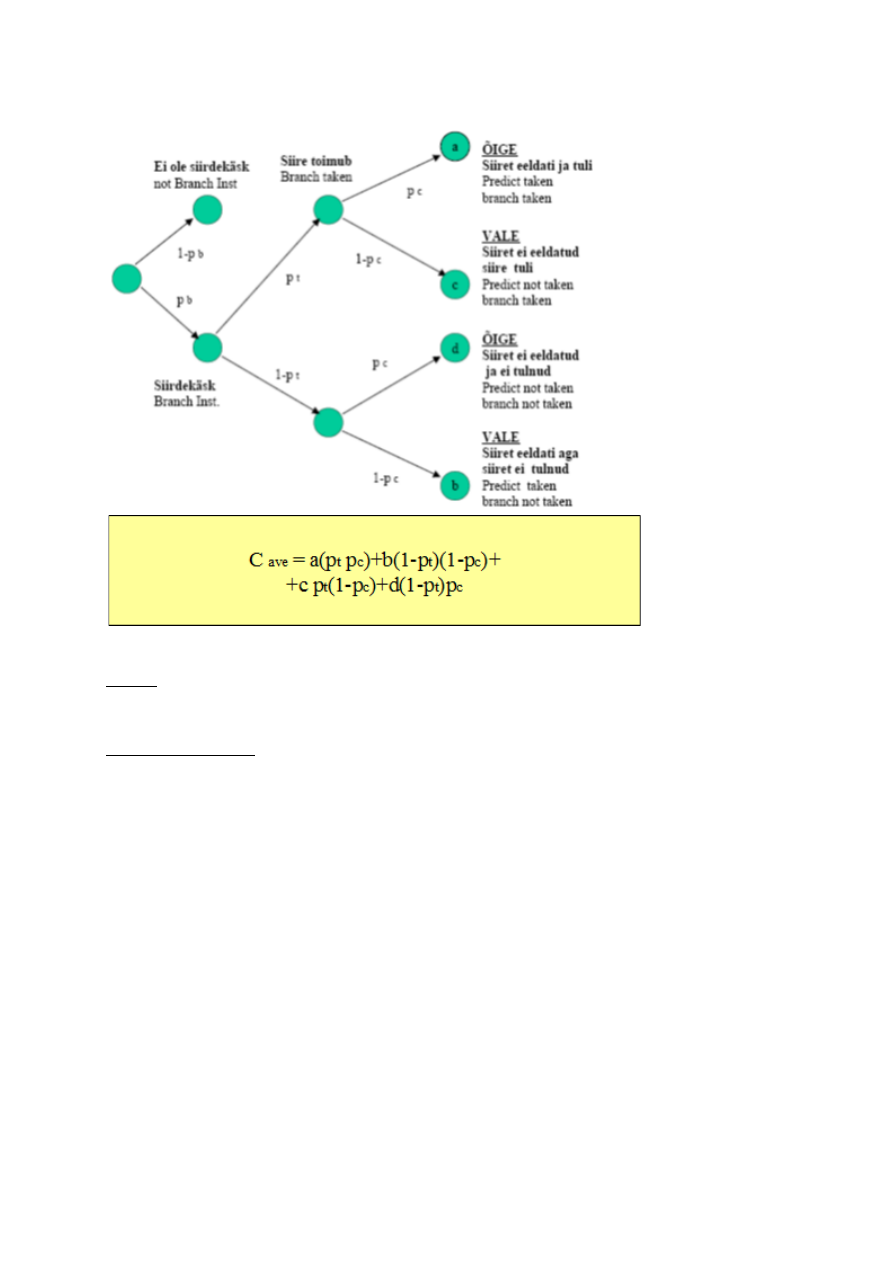
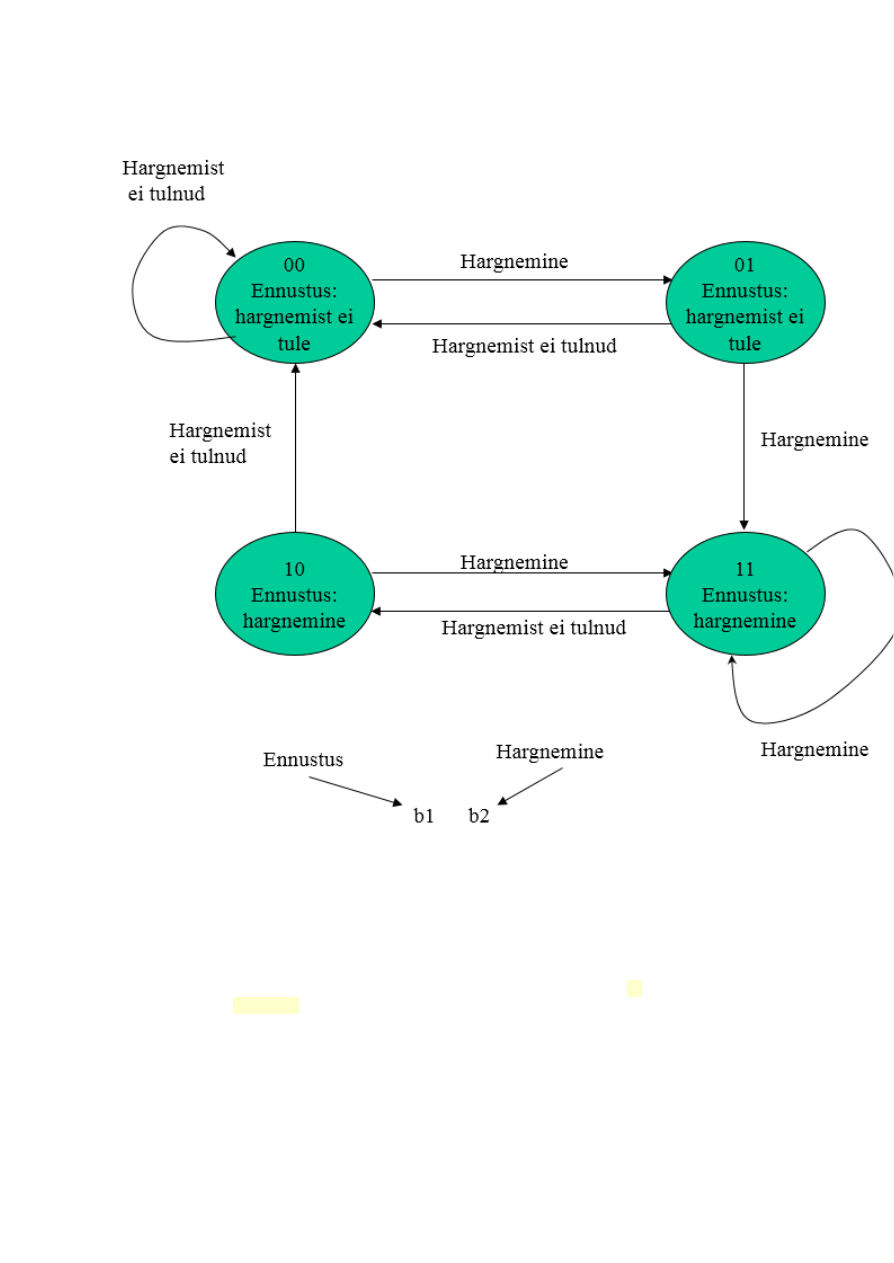




Kõik kommentaarid