Elektrotehnika ja
elektroonika 1. Elektrivälja
potentsiaal, pinge, elektromotoorjõud.Elektrivälja punkti
potentsiaal on mingisse punkti paigutatud positiivse ühiklaengu q
potentsiaalne energia, mis tekib, sest ta võib hakata väljajõu
mõjul liikuma, mille puhul see jõud teeb tööd.
Pinge – elektrivälja kehe
punkti vaheline pinge on suurus, mida mõõdetakse tööga, mis kulub
positiivse ühiklaenug ühest punktist teise üleviimiskeks. U=A/q
Elektromoroorjõud on
mitteelektrivälja mööduks;
toiteallika kogupinge .
Elektromotoorjõud
on töö, mida teevad
vooluallikas toimivad kõrvaljõud ühikulise
laengu (1 C) üleviimisel.
Elektromotoorjõud on võrdne
potentsiaalide vahega vooluallika klemmidel välise ahela puudumisel.
2. Elektrivool : ühik,
suund, valemElektrivool on elektrilaengute
suunatud liikumine. Voolu suunaks loetakse positiivselt laetud
aineosakeste suunda, ehk elektroonide liikumise vastassuunda. Ühik=
1A; valem: I=Q/t (Q-elektrihulk; t-aeg)
3. Elektriline takistus ja juhtivus , eritaksitus ja erijuhtivus Elektritakistuseks nim.
voolutugevuse sõltuvust peale pinge veel juhi omadustest. Takistus
on juhi omadus avaldada vastupanu elektrivoolule R=U/I
Elektrijuhtivus on takistuse
pöördväärtus (G=1/R), mis näitab, kuidas antud juht juhib
elektrivoolu.
Eritakistus näitab, kui suur
on sellest ainest valmistatud ühikulise pikkuse ja
ristlõikepindlalaga juhtme takistus. takistus sõltub materjalist,
on kasulik sisse tuua suurus, mis iseloomustab materjali
elektrijuhtivust. Selliseks suuruseks on eritakistus (või
erijuhtivus). Ühtlase ristlõikega juhi korral on takistus võrdeline
juhi pikkusega (seda suurem, mida pikem on juht) ning pöördvõrdeline
ristlõikepindalaga (seda väiksem, mida jämedam on juht);
võrdeteguriks ongi siis
eritakistus
:
Eritakistuse pöördväärtust
nim.
erijuhtivuseks.
Ühik 1 oom
4. Ohmi seadus kogu
vooluringi kohta ning osa ahela kohtaVool suletud vooluringis on
võrdeline allika emj-ga ja pöördvõrdeline ahela kogutakistusega
I=E/R0+R
Ohmi seadus mingi ahelaosa
kohta: mingis ahela osas on vool võrdne selle ahelaosa pingega ja
pöördvõrdeline selle ahela osa takistusega. I= U/R
5. Takitsite jadaühendus,
rööpühendus, segaühendusJadaühendus on selline
ühendus, kus I
takisti lõpp on ühendatud teise algusega, teise
lõpp kolmanda algusega jne, ning nende vahel ei ole mingit
hargnemist. Vool kõikides ahela osades on võrdne I=I1=I2=I3
(K.I.s); allika
kogu klemmipinge võrgub klemmipingete laenguga U=U1+U2+U3;
ahela
kogutakistus on takistite summa R=R1+R2+R3;
pinged on
võrdelised vastavate takistustega U1/R1=U2/R2=U3/R3
Rööpühenduses on takustite
algused ühendatud ühte punkti, kuid nende lõpud
teisse . Pinged
kõikides harudes on samad U1=U2=U3=U, koguvool võrdub üksikute
voolude
summaga I=I1+I2+I3 (K.I.s);
voolud on võrdelised oma
juhtivustega I1/G1=I2/G2=I3/G3; ahela kogujuhtivus võrdub nende
harude juhtivuste summaga G=G1+G2+G2
Segaühenduseks nim sellist
ühendust, mille puhul osad takistid on ühendatud jadamisi, teised
aga rööbiti. Kuna neid kombinatsioone on tohutult, siis pole nende
lahendamiseks ühtset valemit. Seepärast lahendatakse segeühenduse
ülesandeid järk-järgult kasutades jada- ja rööpühenduse
valemeid.
6. Voolu soojustoime.
Joule-Lenzi seadus. Juhi takistuse sõltuvus temperatuuristElektivool tekitab soojust
kõikides elektrijuhtides, mida ta läbib.
Laengukandjad põrkuvad
juhis liikudes kokku teiste aineosakestega ja annavad neile osa oma
kineetilisest energiast, mille tulemusena hakkavad aineosakesed
intensiivsemalt võnkuma ja toimub
elektrienergia muundumine soojusenergiaks. Energia jäävuse seaduse põhjasl on saadud
soojushulk Q võrdne kulutatud elektritööga.
Joule-Lenzi seadus: Vooluga
juhtmes eralduv soojushulk on võrdeline voolutugevuse ruudu, juhtme
takistuse ja ajaga Q=I2Rt
Juhi takistuse sõltuvus
temperatuurist: soojenemisel metallide takistus suureneb, vedelike,
gaaside ja pooljuhtide oma aga väheneb. Aine takistuse
temperatuurisõltuvust näitab tema takistuse
temperatuuritegur .
7. Juhtmete ristlõike
valikJuhtmete ja kaablite
ülesandeks on elektroonika seadistes elektrivoolu juhtimine,
seetõttu valmistatakse nad tavaliselt vasest, harvemini
alumiiniumist.
Juhtmete ristlõike valilkul
lähtutakse kahest tingimusest: a) lubatud vooli järgi (ehk
soojenemise järgi) Q=I2Rt
->t0C;
Il=Ia(Il-lubatud
vool käsiraamatutes; Ia-arvutuslik
vool K.s ja Ohmi järgi)
b) lubatud pingekao järgi:
∆Ul>=∆Ua,
kus ∆Ul on
lubatud pingekadu toiteliinis.
8. Kirchhoffi seadusedKirchhoffi I sedaus: mingi
sõlme juurde
viidud voolutugevuste summa on võrdne äraviidud
voolutugevuste summaga. Kehtib sõlmede kohta (voolu seadus)
Kirchhoffi II seadus: mistahes
suletud vooluringis allikate emj-de algebraline summa võrdub
takistite pingelangude algebralise summaga selles vooluringis. ΣE=ΣIR
9. Ühe allikaga lineaarahelate arvutusArvutustes kasutatakse Ohmi ja
Kirccoffi I seadust
10. Mitme allikaga
lineaarahelate arvutus Kirchhoffi seaduste alusesl11. Liitahelate arvutus
sõlmepingemeetodilSõlmpunkt on elektriahela
punkt, milles on ühendatud 3 või enam
juhet . Mistahes sõlme
voolude algebarline summa=0, väljuvate voolude summat loetakse
negatiivseks.
12. Töö ja võimsusTöö on energia, mida teeb
keha pannes suletud vooluringis elektrilaenguid liikuma A=Uit (1J)
Võimsus avaldab seadme
töövõimeid. Võimsus on töö, mida tehakse 1 sekundi vältel P=II
(1W)
13. Mittelineaarsed
elemendid. Mittelineaarsed elektriahelad ja nende lahendamine.Mittelineaarse alalsivoolu
takistus sõltub temperatuurist jt välismõjudest
14. Magnetvoog .
Magnetväljatugevus. Elektromagnetiline jõud. Vasaku käe reegelMagnetvooks φ läbi väljaga
ristioleva pinna nim.
voolutiheduse B ja pindala S korrutist: φ=BS
Magnetväljatugevus näitab,
milline magnetiline
ergutus langeb 1 m
Elektromagnetiline jõud:
vastassuunalised magnetväljad tõmbuvad, samasuunalised tõukuvad.
Selle tulemusena mõjub vooluga juhtmele magnetväljas
elektromagnetiline jõud F, suund määratakse vasaku käe
reegliga .
Vasaku käe reegel:
Kui panna vasak
käsi nii, et magnetvälja jõujooned on suunatud peopessa ning
sõrmed näitavad voolu suunda, siis näitab välja sirutatud pöial
juhtmele mõjuva jõu suunda.
15. Elektromagnetiline induktsioon . Parema käe reegelElektromagnetiliseks
induktsiooniks nimetame nähtust, kus magnetvoo muutumine kutsub
kinnises
kontuuris esile elektromotoorjõu, mis on võrdeline
magnetvoo kahanemise kiirusega.
Parema käe (e. kruvi) reegel:
Kui (parempoolne) kruvi panna liikuma piki vooluga juhet nii, et
kruvi pea pöörlemine ühtib
magnetilise induktsiooni vektori
suunaga, siis kruvi ise liigub voolu
kulgemise suunas.
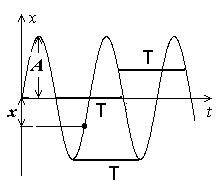
16. Siinuselise emj
saamine. Siinusvoolu parameetrid Siinuselektromotoorjõudu võib
saada, kui homogeenses magnetväljas konstantse
nurkkiirusega pöörata
juhtmekeerdu ümber telje, mis on risti magnetjõujoonte suunaga.
Siinusvoolu parameetrid:
amplituud (võnkuva
keha maksimaalset kõrvalekalle tasakaaluasendist);
nurksagedus ;
algfaas; hälve.
Seda, et tegemist on
perioodilise liikumisega, järeldame siinusfunktsiooni (või
koosinuse) perioodilisusest. Et nende funktsioonide periood on ,
tuleb
võnkeperioodiks
faas :
17. Siinusvoolu, -pinge,
-emj kujutamine vektoritena. Vektordiagramm 18. Vool poolis.
Mahtuvusega vooluring . TakistuskolmnurkTegelikul ehk reaalsel poolil
on nii
aktiiv - kui ka
induktiivtakistus . Need takistused langevad
tegelikult ühte, kuid tinglikult võib neid kijutleda jadamisi
ühendatutuna. Jadamisi ühendamisel on vool ühine, pinge jaguneb
aktiivkomponendiks, mis on vooluga faasis ja induktiivkomponendiks,
mis on
voolust 900
faasist ees.
Mahtuvusega vooluring
Takistuskomlnurk
19. Ahelate arvutus
tarvitite jadaühenduse puhul20. Vahelduvvoolu
RLC-rööpahel. Pingeresonants Pingeresonants on olukord, kus
vahelduvvoolu jadaahelas XL=XC, siis UL=UC ning pingekolmnurk taandub
sirglõiguks ning kogupinge U on vooluga I faasis. Võrdsed ja
vastassuunalised pinged UL ja UC kompentseeruvad vastastiku ning
vooluahelal on aktiivtakistuse iseloom.
21. Ahelate arvutus
tarvitite rööpühenduse puhul. Juhtivused vahelduvvooluahelas22. Vahelduvvooli
RLC-rööpahel. VooluresonantsVooluresonantsiks nim nähtust,
kus ahela takistus kasvab lõpmata suureks ning see omakorda tähendab
voolu lakkamist.
23. Vahelduvvooluvõimsus.
Võimsuskolmnurk. Võimsustegur ja selle parandamineVõimsustegur cosφ=P/S
näitab, mitmenfiku osa toiteallika näivvõimsusest saab tarviti
kasutada aktiivvõimsusena. Cosφ vähenemisel vool sama
aktiivvõimsuse korral suureneb, koos sellega suurenevad ka
võimsuskaod generaatorites,
trafode ja ülekandeliinides.
Cosφ parandamiseks on 2
võimalust: 1) koormata töökodade elektrimootoreid täisvõimsusega,
vältida tühijookse ja alakoormatust; 2) rööbiti mootoritega
ühendada sobiva mahtuvusega kondensaatoreipatareid, mille
mahtuvusvool kompentseerib kas osaliselt või täielikult mootorite
induktiivvooli ja vabastab sellest
toiteallikad ning ülakandeliinid.
24.Kolmefaasilise emj
saamine vahelduvvoolugeneraatoris ja selle omadusiKolmefaasilist emj saab
sünkroonmootori abil ning sellega on võimalus tekitada
elektromagnetvälja.
Kolmefaasiliseks
vahelduvvoolusüsteemiks nim süsteemi kolmest ühefaasilisest
voolust, mida tekitanud 3 emj on ühesuguse amplituudi ja sagedusega,
kuid nihutatud 1200
või 1/3 perioodi
võrra.
Kolmefaasilise emj põhiomadus:
kolmefaasiline süsteem on taskaalustatud, mis tähendab, et igal
hetkel nende emj hetkväärtuste summa on 0. see tähendab:
ea+eb+ec=0
ehk Σe=0. puuduseks on suur juhtmete arv generaatori ja tarvitite
vahel.
25. Kolmefaasiline
sümmeetriline süsteem tähtühenduses. Voolud ja pinged26. Kolmefaasiline
sümmeetriline süsteem kolmnurkühenduses. Voolud ja pinged27. Mõõtevead.
Täpsusklass. Elektrimõõteriistade liigitusMõõtevead väljendavad
ligikaudsust e ebatäpsust, mis tulenevad mõõteriistast,
mõõtemeetodist ning teistest tingimustest, mille tõttu on iga
mõõtetulemus mingil määral ebatäpne. Absoluutseks veaks nim
mõõdetava suuruse mõõdetud ja tegeliku väärtuse vahet.
Suhteline e relatiivne viga on absoluutse vea ja mõõdetava suuruse
tegeliku väärtuse suhe protsentides.
Mõõteriista täpsust
iseloomustab taandatud viga, mille all mõistetakse absoluutse vea ja
mõõteriista skaala nimiväärtuse suhet väljendatuna protsentides.
Suurima
lubatava taandatud vea alusel jagatakse elektrimõõteriistad
nt
GOST -i järgi 9 tüpsusklassi. Mõõteriista tõpsusklassi
märgitakse tema sklaalal arvuga. Mõõteriist on seda täpsem mida
väiksem on ta lubatav viga.
Elektrimõõteriisti
liigitatakse mitmesugustel alustal. Näitaks: 1)mõõdetava
suuruse(
otstarbe ) järgi; 2) vooluliigi järgi a)alalisvoolu
b)vahelduvvoolu c)
alalis ja vahelduvvoolu d) kolmefaasilise voolu
mõõteriistad; 3) tüpsuse järgi; 4)töötingimuste järgi; 5)
ehituse ja tööpõhimõttete järgi
28. Magnetoelektrilised
mõõteriistad. Voolu mõõtmineMagnetoelektrilistel
mõõteriistadel koosneb liikumatu osa põsimagnetist, pehmest
terassilindrist ja magnetšundist. Viimase nihutamisega saab
reguleerida püsimagneti väljatugevust, kui see aja jooksu nõrgeneb.
Liikuv osa koosneb teljele kinnitatud alumiiniumraamist, millel
paikneb peen isoleertraadist mähis. Vool juhitakse mähisesse ja
sealt välja kahe spiraalvedu abil. Teljel olev vedru koos
vastukaaludega tasakaalustavad osuti raskuse. Raam paikneb õhupilus
püsimagneti pooluste ja terassilindri vahel. Voolu suuna muutumisel
pöörab liikuv osa
vastassuunas , seega näitab mõõteriist ka
voolusuunda. Magnetoelektrilised mõõteriistad on amper-, volt- ja
oommeeter .
Voolu mõõdetakse
ampermeetriga, mis jadaühendatakse ahelasse. Ampermeetri takistus
peab olema võimalikult väike, et pingelang ja võimsuskaod temas
oleks väiksed. Mõõteulatuse laiendamiseks rööpühendatakse
ampermeetirga šunt, mis juhib osa mõõdetavat voolu riistast mööda.
Šnut vähendab ka mõõteriista takistust. Vahelduvvooluahelates
laiendatakse mõõteulatust spetsiaalsete voolutrafodega, mis on
mõeldud töötamiseks lühirežiimil.
29. Elektromagnetilised
mõõteriistad. Pinge mõõtmineElektromagnetiliste
mõõteriistade mõõtemehhanism koosneb paigalseivast poolist
mõõdetava vooluga, mis tekitab magnetvälja. Viimase mõjul
magneetub eksentrliselt teljele kinnitatud pehmest
terasest ankur ning tõmbub pooli sisse, pöörates telge koos osutiga. Vedru
tekitab vastumomendi. Voolu suuna muutumisel magneetub südamik ümber
ja tõmbub ikkagi pooli sisse, seega saab seda mõõteriista kasutada
nii alalis- kui ka vahelduvvoolu mõõtemiseks. Kasutatakse amper- ja
voltmeetrina. Mõõteriist talub lühiaegseid ülekoormusi.
Pinget mõõdetakse
voltmaatriga, mis rööpühendatakse tarviti või toiteallikaga.
Voltmeetri takistus peab olema võimalikult suur, et tema vool ja
võimsuskaod oleksid väiksed. Voltmeeri mõõteulatuse laiendamiseks
jadaühendatakse temaga eeltakisti, mis suurendab ka mõõteriista
takistust. Madalpinge-, vahelduvvoolu- ja kõrgepingeahelates
laiendatakse voltmeetri mõõteulatust pingetrafode abil, mille
primaarmähis rööpühendatakse vooluvõrku ning sekundaarmähisega
ühendatakse 100 V nimipingega voltmeeter.
30. Oommeeter. Takistuste
mõõtmine. Meger. Isolatsioonitakistuse mõõtmineOommeetril on sissemonteeritav
või külgeühendatav toitapatarei, millega on jadaühendatud
sisseehitatud
reostaat , magnetoelektriline mõõteriist ja klemmid,
mille külge on ühendatud mõõdetav takisti, millega on rööbiti
nuplüliti. Oommeetril on pööratud skaala, mille 0 asub skaala
lõpus. Mõõdetav takisti ühendatakse oommeetri klemmidega,
vajutatakse nuplülitile noing pööratakse reostaadi nuppu seni,
kuni osuti näitab 0-i. Lüliti vabastamisel näitab osuti skaala
takisti väärtust.
Megeriga kontrollitakse
isolatsioonitakistust. Megeri kerra on paigaldatud käsitsi vändatav
püsimagnetiga alalisvoolugeneraator nimipingega 500 või 1000 V, mis
toidab logomeetrit. Mõõteulatust saab muutu ümberlülitiga.
Isolatsioonitakistuse
mõõtemiseks tuleb
juhtmestik lülitada pingevabaks, sulgeda kõik
lampide ja mootorite lülitid, keerata lambid pesadest välja ning
ühendada toitejuhtmed mootorite klemmide küljest lahti. Juhtme ja
maa vahelise isolatsiooni takistuse mõõtemiseks ühendatakse megeri
juhtmeklemm vastava
juhtmega ja maaühendusklemm maaga. Vända
ettenähtud kiirusega pööramisel näitab osuti mõõdetava
takistuse väärtust. Kahe juhtme vahelise isolatsioonitakistuse
mõõtemiseks tuleb need ühendada megeri klemmidega.
31. Elektrodünaamilised ja
ferrodünaamilised mõõteriistad. Võimsuse mõõtmineElektrodünaamiliste
mõõteriistade mõõtemehhanism koosneb liikumatust poolist ning
selle sees paiknevast liikuvast poolist, mis on kinnitatud teljele
koos kahe spiraalvedru, osuti ja selle vastukaaluga. Liikumatut pooli
läbiv vool tekitab magnetvoo, mistõttu liikuva pooli voolust
läbitud külgedele mõjub elektrodünaamiline jõud. Vahelduvvoolu
korral muutuvad voolude I1 ja I2 suunad üheaegselt ning pöördemoment
jääb samasuunaliseks. Seetõttu saab selle mõõteriistaga mõõta
nii alalis- kui vahelduvvoolu. Mõõteriista kasutatakse
ampermeetrina, voltmeetrina ja vattemeetrina.
Ferrodünaamiliste
mõõteriistade mõõtemehhanismi ehitus ja tööpõhimõte on
peaaegu
samasugune kui magnetoelektrilistel mõõteriistadel.
Erinevuseks on see, et liikumatud südamikud on elektrotehnilisest
terasplekist. Liikumatu pooli vool tekitab magnetvälja, milles
pöördub liikuv pool. Terasest magnetahel tugevdab mõõtemehhanismi
magnetvälja mille tulemusena suureneb pöördemoment ja
tundlikus ning väheneb väliste magnetväljade mõju.
Võimsust mõõdetakse
vattmeetriga
32.
Induktsioonmõõteriistad. Elektrienergia mõõtemineInduktsioonmõõteriistade
mõõtemehhanism töötab ainult vahelduvvooluga. Poolid vooludega I1
ja I2 asuvad elektrotehnilisest terasplekist koostatud südamikel,
mis on paigutatud teineteise suhtes sobiva nurga all.
Vahelduvvool tekitab ühes poolis
vahelduva magnetvoo, mille muutumine indutseerib
alumiiniumkettas pöörisvoolu. Induktsioonmõõteriistu kasutatakse
vahelduvvoolu aktiivenergia arvestina.. sel juhul ühendatakse ta
poolid vooluahelasse samamoodi kui vattemeetri vastavad poolid. Siis
on keetta pöördemoment võrdeline mõõdetava aktiivvõimsusega.
Elektrienergia mõõtmine:
vahelduvvoolu energiat mõõdetakse induktsioonarvestiga. Toodetakse
ühe ja kolmefaasilisi arvesteid, mis võivad sõltuvalt vooluvõrgust
ola kas kahe või kolmesektsioonilised.
Arvesti klemme katva karbi
siseküljele on trükitud ühendusskeem, mistõttu tema ühendamine
ei tohiks olla probleemiks. Alalisvooluarvesteid enam ei toodeta,
sest akude laadmiseks või muuks otstarbeks vajalik
alalisvool saadakse vahelduvvoolu aladamisel ning kulutatud energiat mõõdetakse
sel juhul vahelduvvooli poolelt.
33. Mitteelektriliste
suureuste elektriline mõõtmineElektrilisel teel saab mõõta
kõiki mõõdetavaid mitteelektrilisi suurusi: aeg, kiirus, jõud,
rõhk, temp. Jm. Siin ilmnevad elektrimõõtmiste eelised, et
elektrimõõteriistad on väga täpsed ha tundlikud saab nendega
mõõtea pidevalt ja kuage maa tagant ja automatiseerida ja
kontrollida nende abil tootmisprotsesse. Mitteelektriline suurus
tuleb anduri abil muuta
elektriliseks ja mõõte seda
elektrimõõteriistadega, mille skaala on gradueeritud vastava
mitteelektrilise suuruse ühikutes.
34. Trafod: ehitus,
tööpõhimõte, olulised parameetridTrafo on elektromagneetiline
aparaat , mis on ette nähtud pinge muutmiseks muutumatul sagedusel.
Lihtsaim trafo koosneb kahest
mähisest, mis parema omavahelise magnetilise sidestumise tagamiseks
on paigutatud ühisele ferromagneetilisele südamikule, mis on
harilikult valmistatud elektrotehnilisest lehtterasest. Kui
primaarmähes ühendada vahelduvvooluallikaga, mille pinge on
U1, tekib südamikus vool I1 ja vahelduv magnetvoog φ, mis
sekundaarmähises indutseerib
vahelduvpinge U2. Kui sekundaarmähis
ühedada tarvitiga, mille takistus on R, tekib neid vool I2.
Nende tööpõhimõtteks on
elektromagnetiline induktsioon-primaarmähisesse juhitav vahelduvvool
I1 tekitab terassüdamikus vahelduva magnetvoo amplituudiga φ, mille
muutumine indutseerib mõlemas mähises emj.
Parameetrid: nimivõimsus,
nimipinge, nimivoolud, võimsuskaod, lühisepinge, tühijookusvool
35. MagnetvõimendiEhk magnetmuunduri puhul
kasutatakse ahela lülitamiseks
ferromagnetilise südamikuga
induktiivpooli omadusi. Eraldi juhtmähiste ning sisemise positiivse
tagasiside abil saab ferromagnetilise südamiku viia hõlbsasti
küllastamata olekust küllastunud olekusse või vastupidi ning
sellega muuta palju jõuahelasse lõlitatud induktiivpooli
reaktiivtakistust. Magnetvõimendeid kasutati põhiliselt
madalpingeahelates ning nende väljundvoolud ulatusid sadadesse
ampritesse. Ta võimendustegur on suhteliselt väike, mistõttu
võimendusteguri suurendamiseks tuli kasutada magnetvõimendite
kaskaadlüüsi.
36. Alalisvoolumasinate
ehitus ja tööpõhimõteMasina
staator koosneb
õõnessilindrikujulisest teraskerest, mille külge on kinnitatud
poolused koos neile paigutatud ergutusmähistega mida läbiv
ergutusvool tekitab magentvälja. Poolused koostatakse
elektrotehnilisest terasplekist, nende otste kuju tagab ergutusmähise
hea
kinnituse ja magnetvoo soovitava joatumise pooluuste ja ankru
vahelises õhkpilus. Ergutusmähise
otsad on toodud klemmplaadile.
Kere otsetesse kinnitatakse poltidega laagrikilbid. Ühe laagrikilbi
siseküljele on kinnitatud harjahhoidikud koos
harjadega , mille
küljest suunduvad painduvad vaskjuhtmed masina klemmiplaadile.
Alalisvoolumasinad on
pööratavad nagu sünkroonmasinadki, st neid võib kasutada
generaatori ja mootorina. Ankrumähis koosneb paljudest
sektsioonidest, mis on kommutaatorilestade kaudu omavahel
ühendatud ja moodustavad kinnise ringmähise.
37. Alalisvoolumootorid:
ehitus, tööpõhimõte, mehhaaniline karakteristik, käivitamine,
reverseerimineAlalisvoolumootoreid
kasutatakse elekterveonduses ja mitemesuguste tööpinkide ajamites,
autodes jm.
Magnetväli tekitatakse
alalisvoolumasinas poolustega. Poolused on kas püsimagnetitest või
tekitatakse elektrivooluga ergutusmähistes. Poolused on kinnitatud
silindriliste terasikke külge, mis on üheaegselt masina kereks ja
magnetahela osaks. Seda masinaosa, kus
luuakse magnetväli nim.
induktoriks. Vooluga juhtmeks on mähis, mis paikneb
elektrotehnilisest terasesplekist valmistatud rootori uuretes. Seda
masinaosa nim. ankruks ja mähist ankrumähiseks. Mähise pöörlemisel
magnetväljas on juhtmekeerule mõjuva jõu suund sõltuv
keeru asendist. Et ankur pöörleks, tuleb iga poolpöörde järgi muuta
voolu suunda poolis. Seda tehakse neutraaljoonel, kus poolis tekkivad
jõud on võdsed ja vastassuunalised, ega pööra enam ankrut, sest
möörelmismoment=0. Selleks on masina võllil kommutaator, mis
pöörleb koos ankrumähisega ja muundab voolu suunda. Kommutaator
koosneb üksteisest isoleeritud lestadest. Ankrumähise pooliotsad on
ühendatud lestadega. Vool juhitakse ankrumähisesse harjadega, mille
vahel pöörlevad kommutaatorilestad.
Iga pool on ühendatud 2
lestaga. Mida rohkem on masinas poole, seda ühtlasem on
pöörlemiskiirus.
Selle järgi, kuidas on
omavahel ühendatud masina ankru ja ergutusmähis, liigitatakse
alalisvoolumootoreid: sõltumatu e võõrergutusega masin, kus
ankrumähist ja ergutusmähist toidetakse eraldi; rööpergutusega e
haruvoolumasin, kus ergutusmähis on ühendatud ankrumähisega
rööbiti;
jadaergutusega e peavoolumasin, kus ergutusmähis on
ühendatud ankrumähisega jadamisi; liitergutusega e segaergutusega
masin, mille poolustel on nii rööpergutusmähis kui
jadaergutusmähis.
Alalisvoolumootori
pöörlemissuuna muutmiseks on vaja muuta voolu suunda kas
ankrumähises või ergutusmähises. Polaarsuse muutumisega masina
klemmidel pöörlemissuunda muuta ei saa. Reverseerimiseks tuleb
muuta kas ankruvoolu või ergutusvoolum jättes teise neist vooludest
samasuunaliseks. Alalisvoolumootorit ei tohi käivitada
otselülitamisega liinipingele. Tekkiv käivitusvool on nimivoolust
kuni paarkümend korda suurem (seda suurem, mida suurem ja mida
kiirem on mootor). Suur vool tekitab kommutaatori ringtule ja rikub
kommutaatori ning seega kogu mootori. Käivitamiseks kasutatakse
pinge sujuvat tõstmist või käivitustakistit. Otsekäivitamine on
mõeldav väikeste pingete ja väikese mootori korral, mille
ankrumäise takistus on suur.
Pöörlemiskiiruse
reguleerimine toimub kuni nimikiiruseni ankrupinge tõstmisega
nimipingeni. Edasine kiiruse tõstmine, kui masina ehitus seda
võimaldab, toimub ergutusvooli vähendamisega.
38. Asünkroonmootorid:
ehitus, tööpõhimõtte, mehhaaniline karakteristik, käivitamine,
reverseerimineEnimkasutatavaks jõuallikaks
maailmas on asünkroomootor. Lühisrootoriga asünkroonmootor ei vaja
peaaegu mingit hooldust. Asünkroonmootori põhiosadeks on staator ja
rootor . Staator om mootori paigalseisev osa, mis paikneb
mootorikeres, mis fikseerib kõik masinaosad omavahel ja millega
mootor kinnitatakse tööpingile. Veerelaagrid paiknevad
laagrikilpides, mis tagab masinaosade kontsentrilisuse. Keres paikneb
staatori magnetsüdamik, mis on koostatud 0,3-0,5 mm paksustest
stantsitud staatroplekkidest, mis on omavahel isoleeritud. Staatori
uuretes on pöördmagnetvälja tekitav kolmefaasiline mähis.
Laagritel pöörleb võllile kinnitatud rootor. Samuti on seal
ventilaator jahutusõhu saamiseks. Mootori elektriliseks ühendamiseks
on kerel klemmikarp.
Staatorimähisest, täpsemini
tema pooluspaaride arvust sõltub mootori pöörlemiskiirus.
Sünkroonkiirus (magnetvälja pöörlemiskiirus) sõltub nii
sagedusest kui ka pooluspaaride arvust. Vool tekitatakse
asünkroonmootori rootoris
olevas lühimähises induktsiooni teel.
Selleks peab rootor pöörlema veidi aeglasemini kui magnetväli.
Staatormähises loodava magnetvälja pöörlemiskiiruse ja rootori
pöörlemiskiiruse erinevust nim libistuseks, mida võib tõlgendada
ka rootori suhtelise mahajäämisena sünkroonkiirusega pöörlevast
staatori magnetväljast. Rootor pöörleb asünkroonselt. Kui mootori
koormus kasvab, siis
libistus suureneb, seega suureneb ka rootoris
indutseeritud emj ja seega ka vool. Lisaks pöörlemiskiirusele ja
voolule sõltuvad koormusest ka kasutegur ja võimsustegur cosφ
Asünkroonmootori lülitamisel
võrgupingele tekib suur käivitusvool, mille algväärtus on
tavaliselt 5-7 korda nimivoolust suurem, ja mis kiiruse kasvades
väheneb esialgu üsna aeglaselt. Lülitamisel võrgupingele on ka
mootori võimsustegur esialgu väike. Oluline on mainida, et
asünkroonmootori moment on võrdeline pinge ruduga. Mootori
käivitusvoolu vähendamiseks ja käivitusaja juhtimiseks sobib hästi
sujuvkäiviti, kiiruse reguleerimiseks sobib sagedusmuundur. Mootori
pöörlemissuuna muutmiseks tuleb klemmikarbis omavahel vahetada kaks
toitepingejuhet. Mootori andmed saab teada mootori sildilt.
39. Sünkroongeneraatorid:
ehitus, tööpõhimõte, olulised karakteristikud
Sünkroongeneraator on
vahelduvvoolumasin, mille magnetväli ja selle pöörlev osa
(
induktor ) pöörlevad sünkroonselt (on ühed ja samad).
40. Pooljuhtide
elektrijuhtivus. Lisandjuhtivus . Pn- siire Keemiliselt
puhaste pooljuhtide elektrijuhtivus on võimalik juhul, kui lagunevad
kovalentsed sidemed kristallides. Kovalentsete sidemete katkemise
kutsub esile näiteks
soojendamine suhteliselt madalete
temperatuurideni. Kui kovalentsed sidemed
katkevad , tekivad vabad
laengukandjad ning saame rääkida pooljuhi omajuhtivusest ehk
n-tüüpi juhtivusest. Mida kõrgemale tõsta pooljuhi temperatuuri,
seda suurem on lõhutud kovalentsete sidemete arv ja seda suurem on
vabade laengukandjate arv. See aga tähendab, et keemiliselt puhaste
pooljuhtide eritakistus väheneb temperatuuri tõusmisel. Ses suhtes
on pooljuhid metallidest erinevad, sest metallide eritakistus
suureneb temperatuuri tõusmisel.
Kui
puhtas , kristallilise
ehitusega pooljuhis, saab
elektron energia mis on vajalik kovalentse
sideme purustamiseks, siis elektron "
lahkub " oma kohalt,
mille tulemusel rikutakse kristalli elektroneutraalsus selles kohas.
Kohas, kust elektron lahkus, tekib positiivse laengu ülejääk,
moodustub positiivne auk. See positiivne auk käitub nagu laeng, mis
on absoluutväärtuselt võrdne elektroni laenguga. Elektroni
lahkumisest tekkinud
auku võib
liikuda naaberelektron, see on aga
samaväärne sellega, et nihkus positiivne auk.Välise elektrivälja
puudumisel võib auk liikuda kaootiliselt kogu pooljuhi ulatuses. Kui
laengukandjad liiguvad aines kaootiliselt, siis elektrivoolu aines ei
tekki. Kuna auk/augud liiguvad pooljuhis kaootiliselt, siis
elektrivoolu pooljuhis ei tekki. Kui
pooljuht sattub välisesse
elektrivälja, siis hakkavad kohalt lahkunud elektronid triivima
välja positiivse pooluse poole, augud aga kakkavad triivima välja
negatiivse pooluse poole. Pooljuhi elektrijuhtivust, mis on tingitud
aukude korrapärasest triivimisest nimetatakse auk-omajuhtivuseks ehk
p-tüüpi juhtivuseks. Pooljuhis on
vabu elektrone ja
auke alati
ühepalju, sellepärast on auk- ja elektronjuhtivusel pooljuhis
ühesugune osatähtsus.
Pooljuhtide lisandjuhtivuseks
nimetame elektrijuhtivust, mis on tingitud mingi lisandi,
lisandtsentrite, lisamisest keemiliselt puhta pooljuhi
kristallvõresse. Lisandtsentriteks võivad olla teiste keemiliste
elementide
aatomid . Näiteks, kui lisada puhtale sulagermaaniumile
umbes 10−5%
arseeni , siis tahkumisel tekib tavaline germaaniumi
kristallvõre, ainult mõnes sõlmes on germaaniumi aatomite asemel
arseeni aatomid.
Lisandite ülesanne on tekitada kas lisaelektrone
või lisaauke. Olgu näiteks ränipooljuhi kristallvõres üks räni
aatom , millel on neli valentselektroni asendatud arseeni aatomiga,
millel on viis valentselektroni. Neli arseeni aatomi valentselektroni
moodustavad sidemed naaberaatomitega, viies elektron jääb aga üle.
See üle jäänud elektron on aatomiga nõrgalt seotud ja saab väga
lihtsalt aatomi juurest lahkuda. Kui pooljuht sattub välisesse
elektrivälja, siis hakkavad triivima just sellised vabad elektronid,
ning pooljuhis tekib elektron-lisandjuhtivus. Pooljuhte, mis juhivad
elektrit sellisel viisil nimetatakse elektronpooljuhtideks ehk
n-tüüpi pooljuhtideks. Aatomeid, mis tekitavad lisaelektrone
nimetatakse doonoraatomiteks ehk doonorlisandiks.
Kui
asendada ränipooljuhis
neljavalentne räni aatom kolmevalentse indiumi aatomiga, jääb üks
elektron kõikide kovalentsete sidemete moodustamiseks puudu.
Lisandaatom saab aga moodustada kõik vajalikud sidemed, kui ta
"laenab" puuduva elektroni mõnelt naaberaatomilt. Sellisel
juhul jääb lahkunud elektroni asemele positiivne auk, mille saab
omakorda täita mõne naaberaatomi elektroniga jne. Positiivse
augu järjestikune täitmine elektroniga on samaväärne positiivse augu
liikumisega. Kui selline pooljuht sattub välisesse elektrivälja,
siis hakkab auk liikuma välja negatiivse pooluse suunas ning
pooljuhis tekib auk-lisandjuhtivus. Pooljuhte, milles tekib
elektrivool sellisel viisil nimetatakse lisandjuhtideks, aukjuhtideks
ehk p-tüüpi pooljuhtideks. Aatomeid, mis tekitavad aukjuhtivuse
nimetatakse aktseptoriteks ehk aktseptorlisandiks.
Kui pooljuhti lisada nii
doonorlisandit kui aktseptorlisandit, pooljuhi elektrijuhtivuse tüüp
sõltub üte või teist tüüpi lisandi kontsentratsioonist. See
tähendab, kui ülekaalus on juhtivuselektronid, siis on pooljuht
n-tüüpi, kui aga ülekaalus on augud, siis on pooljuht p-tüüpi.
Pn-siirde e tõkekiht on
spetsiaalse tehnoloogilise protsessiga saadud p-juhtivusega pooljuhi
ja n-juhtivusega pooljuhi
piirikiht . Pn- siirdel on
ventiili omadus-ta
laseb hästi läbi voolu ühes suunas, kuid ei tee seda
teises suundas. Pn siiret saab difuteerimise alusel.
41. Pooljuhtdioodid.
Aladusdioodid: parameetrid, pinge-voolu tunnusjoon Pooljuhtdiood on ühe
pn-
siirdega ja kahe väljega pooljuhtseadis. Ehitus:kujundatud
pn-siire varustatakse kahe väljega ja elektroodidega ning
paigutatakse hermeetilisse kesta, mis kaitseb teda niiskuse eest.
Alaldusdiood on ettenähtud
madalasagedusliku vahelduvvoolu muundamiseks pulseerivaks
alalsivooluks. Kasutatakse peamiselt ränipinddioode. Valmistatakse
kahest dioodist
koosnevaid komplekte, ühesuguste näitajatega
jadalülituses dioodidest alaldustulpi ja erinevate skeemide järgi
ühendatud dioodidest alaldusplokke.
Parameetrid: suurim lubatud
alalisvool (IFmax
on pärivoolu suurim keskväärtus; suurim lubatav alalisvastupinge
URmax
on dioodi siirdele rakendada lubatav
vastupinge suurim väärtus;
sagedusala piirdesagedus.
Pingevoolu tunnusjoon:
(pütsepp:lk 48)
42. Ühefaasilised alaldid Ühefaasilises ühetaktilises
alaldis vool läbib dioodi ja tarvitit trafo sekundaarpinge poole
perioodi ulatuses, st kuni sekundaarmähise otspunkt a on positiivne
otspunkti b suhtes. See vool on pulseeriv,
muutudes amplituudiväärtusest nullini. Alaldatud vooli alaliskomponent
kujutab endast perioodi vältel tarvitit läbiva voolu keskväärtust
Id=0,45
I2.
Poolperioodalaldi peamiseks
puuduseks on väljundpinge tugev pulsatsioon ja trafo võimsuse
ebapiisav kasutamine (pulsatsioonitegur q=1,57). Kõige parem on
ühegaasilie sildlülituses
alaldi , kus
dioodid töötavad
paariti .
Täisperioodalaldis on ventiili läbiva voolu keskväärtus 2x
väiksem kui tarvitit läbiva voolu keskväärtus ning trafo
ümbermagneetumine on täielik.
43. Kolmefaasilised aladid Keskväljavõttega alaldi on
kolm ventiili. Iga ventiili läbib vool ühe kolmandiku vältel
perioodist T, millal vastava faasi pinge ületab ülejäänud
faaside oma.
Voolu alaliskomponent Id=1,17
I2 ,
pinge alaliskomponent U=1,17 U2
Sildlülitusega alaldi, kus
ventiilid töötavad paariti: Ud=2,34
U2(faasipinge);
URmas=
sqrt3 U2max
ja q=0,057
Paaritute numbritega
ventiilide anoodid on ühendatud trfo sekundaarmähise otstega,
kusjuures nende katoodise ühine punkt on välisahela
positiivseks pooluseks. Paarisnumbriliste ventiilide ühendatud anoodid on
välisahela negatiivseks pooluseks.
44. Stabilitron ja
stabistor. Stabilitroniga pingestabilisaatorStabilitron on pooljuhtdiood,
mille tunnusjoonel on vooluteljega peaaegu paraleelne lõik, kus
pinge sõltub voolust vähe
45. Bipolaartransitorid.
ÜE-ühenduses transistori tunnusjooned ja parameetridBipolaartransistor on enamasti
germaaniumist või ränist pooljuhtseadis, mis koodneb kolmest p- ja
n-juhtivusega
kihist ning kahest nendevahelisest pn-siirdest,
kusjuures võimendusprotsessidest võtavad osa nii elektronid kui ka
augud.
ÜE(ühisemitriga)-ühenduses
transistor on levinuim, kuna ta annab suure pinge- ja vooluvõimenduse
ning
sisend ja väljundtakistused ei ole teineteisest väga erinevad,
see võimaldab astemid hõlbsalt sisendada. Välistunnusjooned
saadakse kollektorvoolu Ik
sõltuvusena kollektori ja emitteri vahelisest pingest Uce
püsiva baasivoolu korral.
46. Võimendi struktuur.
Signaali moonutused. VõimendutegurTehnikas on sageli vaja
suurendada signaalide võimsust. Selleks ettenähtud elektronlülitusi
nim võimenditeks. Võimendatav
signaal antakse võimendi
sisendklemmifele. Signaali allikaks võib olla andur, raadioantenn,
mikrofon jne. Võimendi väljundklemmidega ühendatakse tarviti
(täitemehhanism, valjuhääldi). Signaali võimendamine toimub
seejuures toiteallika energia arvel.
Väljund- ja sisendsuuruse
muutuse suhet nim. võimendusteguriks Ku=Uv/Us
Sageduspiirkonda, mille
ulatuses võimendi võimendus ei lange allapoole ettenähtud
väärtust, nim võimendatavaks sageduseks. Võimendi
amplituudi-sageduse tunnusjoon näitab võimendusteguri K sõltuvust
võimendatava signaali sagedusest.
Sagedusmoondustegur
iseloomustab sagdusmoonutust. Need on tingitud reaktiivelementidest,
mille tekistused sõltuvad sagedusest.
Tingimuseks on, et
sagedusmoondetegur peab olema väiksem-võrdne 1,25
Tunnusjoon
47. ÜE-ühenduses
transistorvõimendusaste48. Tagasiside
transistorvõimendis. Transistori temperatuuristabilisatsioon49. OperatsioonvõimendidOperatsioonvõimendid on
itegraallülitid. Põhilised lülitused operatsioonvõimendi:
tagasisidega inventeeriv lülitus Ku=-R1/R2.
positiivsele sisendsignaalile vastab negatiivne väljundsignaal.
Võimendustegur on väiksem kui ilma tagasisideta
operatsioonvõimendi, aga ta on hästi stabiilne.
Idealiseeritud OV_di
võimendustegur läheneb lõpmatusele. Sisendtakistused lõpmata
suured, väljundtakistuse R=0.
Vähesed väliskomponente
lisades saab luua mitmesuguse otstarbega lülitusi, mille parameetrid
sõltuvad praktiliselt üksnes vastusideahela omadustest.
Kasutatavateks tagasisidestatud OV lülitusteks on pingejagur,
integreeriv ja mitteintegreeruva lülitusega OV.
Mitteintegreeruva lülituse
korral on
sisendpinge rakendatud miteinventeerivale sisendile.
Tagasipinge pingejaguri R1-R“ kaudu antkase inventeerivale
sisendile. Väljundpinge on määratud pingede vahega. Tegemist on
negatiivse jadasidemega. Võib kindlaks teha, et tagasisidestatud OV
pingevõimendustegur sõltub ainult takistusest.
Inveteeritava lülituse puhul
sisendsignaal antakse inventeerivale sisendile takistuse kaudu,
kusjuures mitteinventeeriv sisend on ühendatud nullklemmiga.
50. Loogikaelemendid. Loogika algebraDigitaaltehnikas dominis
kasut. Kahendsüsteemi järg põhjustel: funktsiooni realiseerimise
lihtsus; tehte sooritamise põhimõtteline lihtsus; funktisionaalne
ühtusu
Booli algebraga, mis on loogikaül matemaatiline alus.
Tõsi-vastab signaal 1, vale-vastab signaal 0
Loogikalülituste talitus
põhineb transistorlülitustel. Põhielemendid: VÕI-loogiline
liitmine : väljundis 1 siis, kui vähemalt ühel sisendil on signaal
1; JA-loogiline korrutamine:väljundis on 1 ainult siis, kui tema
kõigil sisendeil on signaal 1; kõigi muude signaalikombinatsioonide
korral oon väljundsignaal 0; EI-loogiline
eitus : väljundis on 1
siis, kui tema sisendsignaal on 0
51. Trigerid Triger on kahe stabiilse
väljundolekuga loogikalülitus, millel on otseväljund ja tavaliselt
ka pöördväljund. Erinevalt loogikaelementidest, mille väljundolek
on määratud sisendsignaalide kombinatsiooniga, sõltub trigeri
väljundsignaal veel sellest, milliseks oli kujunenud väljundolek
eelnevalt saabunud sisendsignaalide mõjul. Seega on
trigeril mälu –
ta peab meeles oma eelneva oleku. Loogikalülituste koostamise
lihtsustamiseks on trigeril 2 väljundit: otsene RS-triger, ja PS
triger
52. Türistorid. Tüüritavad
aladidTüristor on selline
pooljuhtelement, mis päripinge olemasolul pärast lühikese
tüürvoolu impulsi andmist tüürelektroodile juhib voolu anoodilt
katoodile. Türistor jääb avatud (juhtivasse) olekusse ka pärast
tüürimpulsi lõppu. Türistor sulgub siis, kui
anoodvool väheneb
nullilähedaseks. Türistore valmistatakse kõigist
pooljuht-lülituselementidest suurimale voolule ja lubatavale
vastupingele. Türistoride
kasutamisel alalisvooluahelates, näiteks
autonoomsetes vaheldites, tuleb türistori sulgemiseks kasutada
sulgeahelaid ehk sundkommutatsiooni ahelaid. Seetõttu pole
türistoride kasutamine alalisvooluahelates levinud.
Erandiks on väga
suure pinge ja vooluga rakendused. Üheoperatsioonilise türistori
sulgumine ehk üleminek juhtivast olekust suletud olekusse sarnaneb
dioodi sulgumisega. Türistori sulgemiseks tuleb türistori
anoodvoolu vähendada allapoole hoidevoolu IH
(mõnikümmend mA).
Tüüritavate ja osaliselt
tüüritavate
alaldite väljundpinget saab juhtida muutes türistoride
sisselülitamishetke ehk tüürnurka alates türistoridel päripinge
tekkimise hetkedest. Mittetüüritava alaldi väljundpinget ei saa
muuta teisiti kui vahelduvpinge suurusega. Kui tüüritava alaldi
türistoride viivitus avamisel on suur ja väljundpinge on madalam
koormuse pingest, siis tagastatakse koormuses salvestunud energiat
vahelduvvooluvõrku. Seda nimetatakse vahelditalitluseks ja seadet,
mis on projekteeritud
niimoodi töötama, võrguga sünkroniseeritud
vaheldiks (inverteriks). Võrguga sünkroniseeritud vaheldi saab
energiat alalisvoolu- või
-pingeallikast vahelduvooluvõrku anda
ainult siis, kui seal on olemas vahelduvpinge ning energiat tarbida
suutvad toiteallikad või
seadmed . Vaheldite
skeemid ei erine
põhimõtteliselt tüüritavate alaldite skeemidest, kuid kõik
tüüritavad alaldiskeemid, nt. osaliselt tüüritavad ja
vastudioodiga skeemid, ei saa töötada vaheldina.Võrguga
sünkroniseeritud alaldid ja vaheldid vajavad töötamiseks
vahelduvpinge olemasolu. Voolu üleminek ühest muunduri (s. t.
alaldi või vaheldi) harust teise ja ventiilide sulgumine toimub
sisendpingete mõjul ehk tegemist on loomuliku kommutatsiooniga.
Tüüritavad alaldid ja võrguga sünkroniseeritud vaheldid
moodustavad
duaalse
süsteemi, s. t. ühed ja samad tüüritavad muundurilülitused
võivad reeglina töötada nii alaldi kui vaheldina. Seetõttu on
raamatu mahu huvides otstarbekas vaadelda kõiki võrguga
sünkroniseeritud muundureid üheskoos. Käsitletakse ainult
tüüritavaid muundureid, kuna mittetüüritavad ja osaliselt
tüüritavad alaldid on nende erijuhtumid, mis on tüüritavate
muundurite teooria tundmisel lihtsalt tuletatavad.































Kõik kommentaarid