Kordamisküsimused aines IAY0520 1. Mõisted arvuti, arvutisüsteem, arvuti riistvara iseloomustavad näitajad.Arvuti on tarkvarast ja riistvarast koosnev süsteem, mis on
määratud info töötlemiseks.
Arvutisüsteem on täies
töökorras arvuti, kuhu kuuluvad arvuti,
tarkvara ja välisseadmed,
mis on vajalikud arvuti tööks.
Arvuti riistvara iseloomustavad
näitajad: protsessor – aritmeetika-loogikaüksus
(funktsionaalsus; info töötluse kiirus ja täpsus); juhtüksus
(
paindlikkus ; kiirus;
keerukus );
mälusüsteem –
mälusüsteemi hierarhiline korraldus; mälude infomahutavus; mälude
kiirus; maksumus;
sisend -väljundsüsteem –
infoläbilaskevõime (sh
reaktsiooniaeg ); S/V-süsteemi (SVS)
struktuurne korraldus; S/V-süsteemi talitluse korraldus (programselt
juhitav SVS; katkestuste süsteemi rakendav SVS; otsemällupöörduse
(DMA) rakendamine;
kanalite (selektro, multipleks) rakendamine;
S/V-
protsessorite ehk preprotsessorite (eelprotsessorite) //
front -end
processor// rakendamine).
2. Arvutipõlvkondade iseloomustus (iseloomulikud jooned).1. põlvkond - aastad 1946 - 1954; elementbaasi moodustasid
elektronlambid; jõudlus jäi vahemikku 2x103 kuni 16x103;
arhitektuur tugines siseprogrammi kasutamisele; igal
arvutil oli
ainuslik protsessor;
operatiivmälu infomahutavus oli 100 baidist
kuni 2kb; progemine masinkeeles; mõõtmed ja mass suur,
töökindlus madal.
2. põlvkond - aastad 1954 - 1965; elementbaasi moodustasid
transistorid; jõudlus jäi vahemikku 6x103 kuni 3x106;
progemisel arvkood asendati sõnaliste käskudega; hakati arendama
süsteemset tarkvara; väiksemad, kiiremad ja töökindlamad
3. põlvkond - aastad 1965 - 1971 ; elementbaasi moodustasid
madala- ja keskmise integratsioonitasemega integraallülitused;
jõudlus ulatus 0,1kuni 400 miljoni operatsioonini sek; mõõtmed
vähenesid, märgatavalt
paranes töökindlus; loobuti suletud
arhitektuurist ja
mindi üle avatud arhitektuurile. ühilduvad
arvutipered; osade arvutite põhimäludes asendasid kiired
pooljuhtmälud aeglasemaid ferriitmälusid; hakati kasutama käskude
konveiertöötlust, multitegumtööd ja tööd ajajaotusreźiimis;
kõrvuti suurarvutitega arendati intesiivselt miniarvuteid.
4. põlvkond - aastad 1971 - 1981; Keskmise ja kõrge
integratsioonitasemega mikrolülituste massiline kasutamine; esimesed
mikroprotsessorlülitused (intel 4004(1971)); personaalarvutid;
jõudlus vahemikus 9,5 kuni 1000 miljonit operatsiooni sek;
rööptöötlusele orienteeritud multiprotsessorsüsteemid;
lausintegraallülitusena hakatakse valmistama kiireid ja suure
infomahitavusega pooljuhtmälukiipe. Tarkvaraarenduses on tähelepanu
keskmes operatsioonisüsteemide, kompilaatorite ja rööptöötluseks
sobivate kõrgkeelte arendamine;
5. põlvkond - aastad 1981 - 1991; mikrolülituste
integratisoonitaseme jätkuv tõus; võimsad
RISC -arhitektuuriga
mikroprotsessorid; info töötlemisel massiliselt
rakendama rööp -
ehk paralleeltöötlust; Intensiivselt tegeletakse hajus- ja
võrkstruktuuride uurimise ning arendamisega.
6. põlvkond - alates 1991. aastast; uuringud üleminekuks
mikrotehnoloogiliselt elementbaasilt nanotehnoloogiale; rööptöötluse
uute meetodite ja tehniliste lahenduste otsingud; Püütakse välja
töötada uusi
programmeerimise tehnoloogiaid, mis
sobiksid rööptööle
ja keerukatele multiprotsessorsüsteemidele; Heterogeensete
paralleelprotsessorstruktuuride, kus protsessorkiipdesse on
integreeritud sõltumatult talitlevaid eriprotsessorlülitusi,
.
uurimine ja rakendamine; Lähim eesmärk on nn teraflops arvutite
(multiprotsessorsüsteemide) tootmine; Plahvatuslik arvutite
laivõrkude evitamine ja ülikiire arendamine; Pilvstruktuuride
uurimine ja pilvtöötluse evitamine;
3. Arhitektuuri, mikroarhitektuuri ja seadmestuse mõisted.Arhitektuur iseloomustab seda, mida süsteem teeb ning ta on
määratletud arvuti käsustiku ja talitlusmudeli kaudu.
Mikroarhitektuur kirjeldab arvutiarhitektuuri ja selle
iseärasusi konkreetses realisatsioonis (loob eeldused arvutiperede
tekkeks).
Seadmestus on (
loogika )struktuur, mis määrab
konkreetsel juhul selle, kuidas arhitektuuriga määratud süsteem
toimib.
4. Klassikalised arvutiarhitektuurid (Princetoni, Harvardi ja modifitseeritud Harvardi arhitektuur).Klassikalisi arvutiarhitektuure iseloomustavad: terviklik
töötlusüksus; ühitatud käsu- ja andmemälu (ühine mäluruum);
ühitatud süsteemisiin protsessori ja mälu vahel;
tsentraalne (
keskne ) juhtimine; mälu lineaaradresseerimine; arhitektuur toetab
madala taseme programmeerimise keelt.
Princetoni arhitektuur -
terviklik töötlusüksus; ühitatud käsu- ja andmemälu; ühitatud
süsteemisiin protsessori ja mälu vahel; tsentraalne juhtimine; mälu
lineaaradresseerimine; toetab madala taseme progemis keeli.
Harvardi
arhitektuur - eraldi
mälud käskude ja andmete säilitamiseks;
eraldis siinid käsu- ja andmemäludesse;
kiireneb suhtlus mäludega
-> kasvab arvutisüsteemi jõudlus; struktuurselt keerukam kui
Princetoni arhitektuuriga arvuti, kuid
paindlikum ).
Modifitseeritud
Harvardi arhitektuur - Modifitseeritud Harvardi
arvutiarhitektuuri rakendatakse
tüüpiliselt kaasaegsetes
universaal -arvuteis.
5. Princetoni arvutimudeli piirangud.Piirangud mälupöördustel; puudub selgelt avalduv erisus mälus
säilitatava info vahel; tugineb ühemõõtlmelistele struktuuridele;
andmetüüpide
tuvastamine toimub läbi programmiloogika.
6. Käsustikupõhine arhitektuur, arvutiarhitektuuride
käsustikupõhised mudelid.Käsustikupõhine arhitektuur (ISA) on liideseks arvuti
riist - ja
tarkvara vahel. Käsustiku põhine arhitektuur (ISA) hõlmab: 1.
Arvuti käsustiku, 2. Mälu, 3. Programmisti poolt kasutatavad
registrid süsteemis. Arvuti
ressursid , mis ei ole programmistile
kättesaadavad, ei kuulu ISA koosseisu. ISA määratleb mida seadme
riistvara teeb, kuid mitte seda, kuidas ta seda teeb.
Käsustikupõhised mudelid: akumulaatoripõhine, pinumälupõhine,
mälu-mälupõhine,
register -mälupõhine, register-registripõhine.
7. Protsessorites kasutatavate käskude vormingud, formaadid
käsukoodi valik.Käsustikku kuuluvate käskude puhul eristatakse: 1. Käsu vormingut
2. Käsu
formaati . Püsiva
vormingu ja formaadiga
käsud (MIPS,
Power PC, SPARC); Muutuva vormingu ja formaadiga käsud (IBM 360/370, Intel
80x86). Käsuformaat võib olla: 1. Fikseeritud - kõik käsustikku
kuuluvad käsud on ühesuguse pikkusega; 2.
Varieeruv – käsu
pikkus sõltub käsust. Iga
käsk peab sisaldama juhtinformatsiooni,
mis näitab käsu poolt sooritatava infoteisenduse olemust ->
käsukoodi. Käsukoodi valik: Tüüpilised käsukoodi moodustamise
viisid: 1. Reserveeritud käsukoodid (igal
käsul ainult temale omane
iduviduaalne käsukood, Intel 8080) 2. Klassipõhised käsukoodid
(koosneb kahest osast: klassikood ja operatsioonikood,Mostek 6502).
8. Käsutsükli täitmise üldistatud mudel.Täitmisele kuuluva käsu aadressi arvutamine -> käsuvõtt ->
käsukoodi dekodeerimine -> operandi aadressi arvutamine ->
operandivõtt (mitu operandi) ->
operatsioon andmetega (string või
vektorandmed ) -> salvestamisele kuuluva tulemi aadressi arvutamine
-> tulemi salvestus (mitu tulemit) -> katkestusnõuete kontroll
-> katkestusnõude töötlus.
9. Translaatorite liigid.Kompilaator (on kõrgkeele translaator, st programm, mida
rakendatakse kõrgtaseme algoritmikeeles koostatud programmi
transleerimisel masinakeelde), interpretaator (on
arvutiprogramm , mis
käivitab programmikoodi, mis ei ole masinkoodi kompileeritud),
assembler (arvutiprogramm mis tõlgib assambler keele objekti faili
või masinkeele vormi).
10. Kompilaator ja selle üldistatud mudel.Kompilaator on kõrgkeele translaator, st programm, mida rakendatakse
kõrgtaseme algoritmikeeles koostatud programmi transleerimisel
masinakeelde. Kõrgkeelne (C, Fortran, jt) programm ->
keelespetsiifiline
eeltöötlus (sõltuvused: keelest/arvutist
sõltumatu, Funktrioon: teisendab kõtgkeele konstruktisoonid
vahekeelde)-> kõrgtaseme optimeeringud (S: mõnevõrra keelest
sõltuv, arvutist sõltumatu enamasti) -> Globaaloptimeeringud (S:
vähene arvutist je keelest sõltuvus. F: sisaldab globaalseid ja
lokaalseid optimeeringuid) -> koodigeneraator (S: keelest
sõltumatu, tugevasti arvutist sõltuv. F: Käskude valik ja arvutist
sõltuvad optimeeringud -> Objektkood (masinakeelne programm)
11. Operatsioonisüsteemi üldistatud arhitektuurne mudel.Rakenduste tase (rakendused -> (käsundid, kompilaatorid,
interpredaatorid, süsteemiteek)) -> OS-i tase: (mäluhaldur,
failisüsteemi
haldur , süsteemi haldur, võrguhaldur, S/V-süsteemi
haldur) -> OS tuum (protsessori haldur, protsessi haldur) ->
Riistvara tase: Erinevad kontrollerid (seadmete kontroller,
mälukontroller terminalseadmete kontroller)/süsteemi riistvara.
Operatsioonisüsteemi põhifunktsioonideks on tegumite (protsesside)2
ajaline planeerimine ja
mäluhaldus . Operatsioonisüsteem määrab
milline protsess (protsessid) kuulub antud hetkel riistvaras
töötlusele.
12. Operatsioonisüsteemi põhikomponendid .Mäluhaldur (
memory manager ), protsessori haldur (processor manager),
S/V-seadmehaldur (device manager), failihaldur (file manager),
võrguhaldur (network manager).
13. Protsessid, lõimed , tegevuste järjestamine arvutis.Protsess –
töödeldav programm või selle osa (järjestatav
üksus).
Lõim – sisaldub protsessis (järjestatav üksus
ja/või töödeldava programmi osa). Protsess läbib oma
eluea jooksul üldiselt järgmised põhiolekud: Hoie – valmidus –
käitus –
ootel –
lõpetamine .
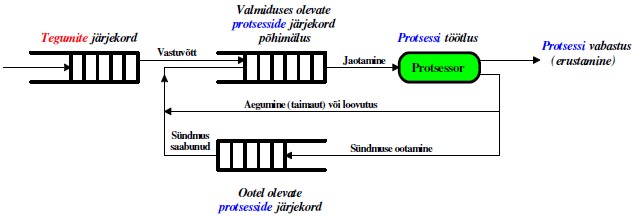
14. Protsesside töötluse korralduse mudel.Operatsioonisüsteemi tuuma osa mis tegeleb protsessori ressursside
jaotamisega programmide ja protsesside vahel on järjestid
//
scheduler //. Järjesti määrab rutiinid, mis suunatakse
protsessorisse töötlemisele. Järjestite liigid, mida rakendatakse
protsesside ohjel, on süsteemiti varieeruv.
15. Programmide ja protsesside järjestamise etapid.Kaugjärjesti – kasutatakse harva. Ülesandeks on otsustada,
millised protsessid suunatakes valmisolevate protsesside jadasse.
Vahejärjesti – tegeleb
põhimälu dünaamilise jaotamisega
protsesside vahel, mida
parajasti protsessoris töödeldakse.
Lähijärjesti – tegeleb otseselt protsessoris käivitavate
protsesside väljavalimisega kõigi põhimälus resideerivate
protsesside seast.
Jaoturi - (dispetšeri) ülesandeks on
lähijärjesti poolt välja valitud protsessi edastamine
protsessorisse ja protsessi poolt vajatavate
registrite ettevalmistamine tööks. Protsesside järjestamine võib toimuda kas
mittetõrjuvalt (protsess on jõudnud juba töötluse staadiumisse,
siis seda ei kõrvaldata protsessorist seni, kuni tema töötlus on
täielikult lõpule
viidud ) või tõrjuvalt (protsesside töötluse
korraldamisel nende prioriteetidest,
FIFO , SPN, RR, jt).
16. Arvutite jõudluse hindamine ja jõudlusnäitajad (jõudlus,
töötlusaeg, kiirendus, kiirendus rööptöötlusel , rööptöötluse
efektiivsus).Arvuti, arvutisüsteemi või arvuti allsüsteemi
jõudlus (P)
//performance// on seotud informatsiooni
töötlusajaga (Tex)
vastavas süsteemis: P=(Tex)-1. Relatiivset
jõudlust iseloomustab
kiirendustegur
(SR) //
speedup
ratio//, mis on
määratud suhtega:
SR=TexR/Tex.
Infotöötluse
kiirendus (S) määratakse programmi
töötlusaegade suhtena, st modifitseerimata (algse ehk vana)
programmi töötlusaja kestus (To) suhe modifitseeritud (parendatud)
programmi töötlusaega (Tm),
S=To-Tm/Tm*100. Kiirendus
rööptöötlusel:
Sp=Ts(töötlusaeg
jadatöötlusel/Tp(töötlusaeg rööptöötlusel). Rööptöötluse
efektiivsus:
Ep=kiirendus/protessorite arv.17. Amdahli seadus ja selle olemus.Amdahli seadus kirjeldab seda, kuidas muutub kogu arvuti (süsteemi)
jõudlus (informatsiooni töötlusaeg) pärast seda, kui arvuti
(süsteemi) mingis osas viiakse sisse
parendusi , mis tõstavad selle
osa jõudlust, st vähendavad infotöötluseks kuluvat aega. Amdhali
seadust esitatakse sageli kiirenduse (S) kaudu.
18. Jõudlustestid, nende hierarhia.Jõudlustestid on teatavad standardsed programmikogumid, mida
käitatakse hinnatavail arvuteil, enamasti eesmärgiga saada nende
riistvara jõudluslikke näitajaid, kuid jõudlusteste rakendatakse
samuti ka tarkvara efektiivsuse (talitluskiiruse) hindamisel.
Jõudlustestimisel saadud tulemuste interpreteerimisel tuleb olla
kriitiline, täpselt on vaja teada mida mõõdeti ja kuidas mõõdeti.
Vääralt läbiviidud jõudlustestimine annab eksitavat
informatsiooni mõõdetava süsteemi (seadme) jõudluse kohta.
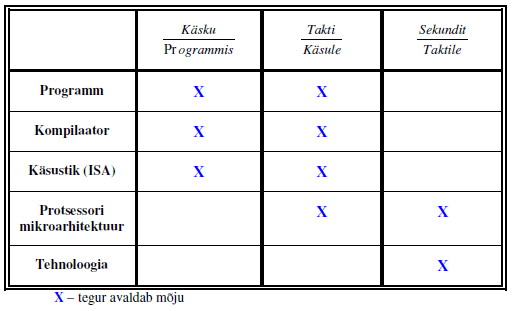
19. Protsessori jõudlust mõjutavad tegurid(programm,
kompilaator, ISA, mikroarhitektuur,tehnoloogia).Protsessori jõudlust mõjutavad tehnoloogia (võimalused ja
piirangud), teooria ja disaini nupukus, kasutajate vajadused,
majanduslik ja kaubanduslik surve. Arvuti protsessori jõudlust
mõjutavad tegurid:
Protsessori_töötlusaeg=Käsku/ Programmis *Takti/Käsule*Sekundit/Taktile.
20. Mono- ja multitaktilise käsutöötluse põhimõtted.Monotaktilisel (ühetaktilisel) käsutöötlusel on kõikide
käskude töötluseks ette nähtud ühesugused ajavahemikud, mille
kestus määratakse lähtuvalt kõige kauem kestva käsu töötluseks
kuluva ajavahemikuga.
Multitaktilisel töötlusel toimub käsu
töötlus lihtsamate ja ajaliselt lühemate tegevuste jadana, kuid
erinevate käskude töötluseks kulutatakse erinev arv takte.
21. Konveiertöötluse põhimõtted, konveierite liigid (mudelid).Konveiertöötlusel viiakse funktsionaalseis seadmeis infotöötlust
läbi mitmes etapis (konveieri
astmes ). Kui infotöötlus ühel
etapil (konveieri astmes) lõpeb, siis saadud tulemused suunatakse
järgmisse töötlusetappi ehk töötlusfaasi. Konveierit
moodustavate üksikute
astmete omavaheliste ühenduste viiside järgi
eristatakse kahte konveieri struktuuri - lineaarne ja mittelineaarne.
Lineaarse konveieri moodustab teatav kogumik jadamisi
ühendatud infotöötluslülitusi. Töötlusesse suunatav info ning
konveieri üksikuis astmes saadud tulemid säilitatakse
ajutiselt konveieri astmetevahelistes
puhverregistrites.
Mittelineaarne
konveier sisaldab
tagasiside ja otseedastuse ahelaid. Need
konveierid sobivad hästi rekursiivsete funktsioonide ning
skalaarkorrutiste väärtuste arvutamiseks. Konveierid võivad oma
talitlusviisilt olla kas
sünkroonsed või
asünkroonsed.22. Sünkroonse käsukonveieri jõudlus, käsukonveieri jõudlust
mõjutavad tegurid.Eeldame, et käsu töötlus ilma konveierita arvutis kestab t
ajaühikut. Kui sama käsku töödelda ideaalses tasakaalustatud
n-astmelises sünkroonses käsukonveieris, kus käskude töötlus on
jaotatud n ajaliselt võrdse kestusega (t/n) töötlusetapiks, siis
saavutatav informatsiooni läbilaske tõus (TPn) ehk kiirendus, mida
konveiertöötluse rakendamine võimaldab võrreldes konveierita
töötlusega, on võrdne:
TPn=n/ [1+(q*n)/t]. Käsukonveieri
jõudlust mõjutavad tegurid: konveieri struktuurne keerukus,
käsutöötlusel esinevad “ülehüppavad”
astmed konveieris,
riskinähtustest põhjustatud tühitaktid konveieri töös.
23. Riist- ja tarkvaraliselt juhitavad vahemälud, vahemälu ühendamine mälusüsteemi.Protsessor (registrikogum) vahemälu (vahemälu koostöö
protsessori põhimäluga) põhimälu. Mälusüsteemi
hierarhilises struktuuris on kesksel kohal vahemälud, mis
võimaldavad töödeldavat informatsiooni hoida võimalikult
protsessori lähedal ja seeläbi tagada kiire
andmevahetuse protsessori ja mälusüsteemi vahel. Vahemäludega hierarhilises
mälusüsteemis võib
andmevahetus süsteemi mälude vahel toimuda
erinevalt, sõltuvalt sellest, kuidas on selles korraldatud
informatsiooni lugemise ja salvestamise
operatsioonid . Andmete
lugemine mälusüsteemist sõltub sellest, kas kasutatakse
läbivasetusega vahemälu //look
through cache// või kõrvalasetusega
vahemälu //look aside cache//. Vahemälu kontrollerlülitus ohjab
riistvaraliselt andmevahetusi protsessori ja vahemälu ning vahemälu
ja põhimälu vahel.
24. Vahemälu üldistatud struktuurne mudel.Vahemälud koosnevad järgmistest põhisõlmedest: kiiretoimeline
suuremahuline andmemälu (säilitatakse põhimälust saadud inf kui
ka protsessorist väljastatud tulemeid); ülikiire sildikoodi mälu;
spetsiaalne juhtmälumälu vahemälu iga mälurea tunnusbittide
säilitamiseks; loogikalülitused (mille abil toimub vahemälusse
talletatud informatsiooni asendamise ohje); juhtseade (ohjatakse
kõiki vahemälus toimuvaid protsesse).
25. Otsevastendusvahemälu.Põhimälu aadressiruum jaotatakse võrdse pikkusega andmeplokkideks,
mis mahuksid vahemälu ühele reale. Sellisel juhul asuks iga
põhimälu andmeplokk vahemälus ainult ühe kindla
aadressiga vahemälureal, st tegemist oleks otsevastendusega vahemäluga.
Otsevastendusega vahemälu struktuur H-tabamus; E-väljastus
lubatud; M-mittetabamus; V – vahemälu juhtmälu. Otsevastendusega
vahemälu poole pöördumiseks vajalik aadressisõna koosneb eraldi
p-järgulisest sildikoodist, k-järgulisest indeksikoodist ja
b-järgulisest baidikoodist.
26. Moodul - assotsiatiivne vahemälu.Moodul-assotsiatiivsetes vahemäludes saab korraga säilitada ühe ja
sama indeksiaadressiga andmeplokke, mis asuvad põhimälus erinevail
mälulehekülgedel, st omavad erinevaid sildikoode.
Moodul-assotsiatiivne vahemälu on kui süsteem mitmest paralleelselt
töötavast otsevastandusega vahemälust.
27. Täisassotsiatiivne vahemälu.Kõige paindlikumad informatsiooni vastendamisel põhi- ja vahemälude
vahel. Täisassotsiatiivsete vahemälude korral ei ole piiranguid
informatsiooni paiknemisele vahemälus. Selles vahemälus säilitatava
informatsiooni poole pöördumisel ei ole tarvidust mitme
aadressivälja järele, neid asendab üks üldine sildiväli.
28. Informatsiooni salvestus ja lugemine vahemälust.Lugemine vahemälust: 1) andmed on vahemälus -> andmed
protsessitakse 2) andmed ei ole vahemälus -> läbivaade (suunata
andmed protsessorisse pärast vahemälurea täitmist põhimälust VÕI
suunata andmed protsessorisse samaaegselt vahemälu täitmisega
põhimälust). Salvestus vahemällu: 1) andmed on vahemälus ->
läbisalvestus (
salvestada andmed vahe- ja põhimällu) VÕI
järlesavlestus (salvestada andmed ainult vahemällu. Vahemälust
kantakse andmed põhimällu siis, kui vahemälu vastav rida kuulub
kustutamisele) 2) andmed ei ole vahemälus -> omistussalvestus
(Salvestada andmed vahemälu reale, mis tuuakse eelnevalt põhimälust
vahemällu) VÕI mitteomistav salvestus (info muudetakse ainult
põhimälus. vahemällu infot salvestada ei saa).
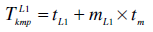
29. Keskmine pöördusaeg vahemälusid (1- ja 2-tasemeline)
sisaldavas hierarhilises mälusüsteemis.Ühetasemeline vahemälussüsteem: Protsessor L1 vahemälu
(QL1) Põhimälu Qm. Keskmine
mälupöörduse aeg ühetasemelise vahemälusüsteemiga
mälusüsteemis:
Kahetasemeline vahemälussüsteem: Protsessor L1
vahemälu (QL1) L1 vahemälu (QL2) Põhimälu Qm. Keskmine
mälupöörduse aeg kahetasemelise vahemälusüsteemiga
mälusüsteemis:
30. RISC-arhitektuuriga protsessori üldistatud mudel.RISC protsessorite loomisel on eesmärgiks saavutada info
töötluskiiruseks vähemalt üks käsk ühel taktil. Niivõrd kõrge
jõudluse saavutamine oleks raske ilma käskude konveiertöötluseta,
efektiivse (vahe)mälusüsteemi ning spetsialiseeritud kompilaatorite
rakendamiseta. Programmide töötluse kiirendamiseks võeti RISC
protsessoreis aluseks registerorienteeritud arhitektuur. Selleks
lülitati protsessorite struktuuri suuremahulised registrikogumid.
Registrikogumi registrite korraldamisel on põhimõtteliselt kaks
võimalust: 1. Üksikregistrikogumi e. SRS- //
Single Register Set//
meetod 2. Akendatud registrikogumi e. WRS- //Windowed Register
Sets //
meetod.
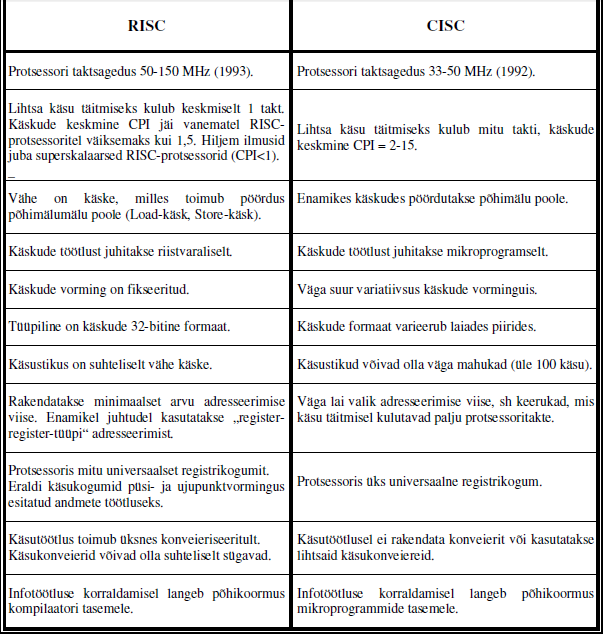
31. RISC-arhitektuuriga mikroprotsessorite tüüpilisi omadusi.1. RISC arhitektuuriga
protsessorid on loodud käsujadade
töötlemiseks suure kiirusega, vähemalt üks käsk ühe taktiga. 2.
Rakendatakse piiratud käskude arvuga käsustikku. 3. Käsuvorminguis
avaldub orienteeritus "register-register" tüüpi
operatsioonidele. 4. Suhtlus mälusüsteemiga toimub minimaalse arvu
käskudega (
LOAD ja STORE). 5. Käskude töötluse kiirendamiseks on
mikroprogrammjuhtimine asendatud riistvaralisega. 6.
RISC-protsessorile on iseloomulik suurte spetsiifilise korraldusega
registrikogumite olemasolu. Registrikogumid soodustavad
konveiertöötluse korraldamist; 7. Protsessori struktuuri kuuluvad
mitmed, enamasti paralleelselt töötavad konveierid; 8. Tüüpiline
on mitme paralleelselt talitleva erineva töötlusseadme olemasolu
protsessoreis; 9. Protsessori jõudlus on
otseses sõltuvuses
konveierite optimaalsest laadest informatsiooniga; 10. Konveierite
operatiivsel varustamisel informatsiooniga on eriline koht
vahemäludel, eriti esmataseme (L1-taseme) kiibisisestel vahemäludel;
11. Informatsiooni ettevalmistamisel rakendatakse efektiivseid
optimeerivaid kompilaatoreid. 12. RISC-arhitektuur toetab
riistvaralisel tasemel kõrgkeelsete programmide töötlust. 13.
Kompileerimisel saadavate objektprogrammide maht RISC-arhitektuuri
korral on tavaliselt mõnevõrra suurem, kui
CISC -arhitektuuriga
protsessoreil; 14. Katkestuste töötlusel võib esineda ajakadusid.
15. Kui CISC-arhitektuuriga protsessorid arenevad makroparallelismi
suunas.
32. RISC- ja CISC-arhitektuuride võrdlus.33. Arvutite mälu-, sagedus- ja võimsusmüüri olemus.Mälumüür – programmide töötluskiirust piirab
infoliikluse kiirus protsessori ja mälusüsteemi vahel.
Sagedusmüür
– klassikalistes protsessorites on rakendanud järjest suurema
astmete arvuga käsukonveiereid, et saavutada järjest kõrgemat
infotöötluse kiirust. Konveierite üksikute astmete struktuurne
keerukus ja nende talitluskiirus on jõudmas oma
füüsilisele piirile.
Võimsusmüür – protsessorkristallidest eralduva
soojusenergia kogus on liialt suur, et seda jõutaks piisavalt
kiiresti kristallilt ära juhtida (
kristallide termošokk). Kuna
protsessorite
taktsagedus (f) kasvab, siis kasvab ka
protsessorkiipide poolt
tarbitav ja valdavas osas soojusenergia nöol
eralduv võimsus (P), mis põhjustab kiibikristalli ülekuumenemist.
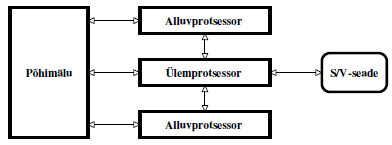
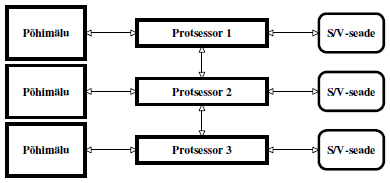
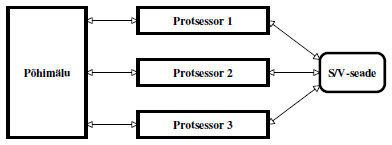
34. Rööptöötluse tasemed ja rööptöötluse kolm
põhikonfiguratsiooni.Programmi tase; tegumi ehk protseduuri tase; käskude tase;
käsusisene tase.
Ülem-alluv konfiguratsioon:
Nõrga sidestusega konfiguratsioon:
Sümmeetriline konfiguratsioon:
35. Juhtimissõltuvused rööptöötlusel, Bernsteini tingimused.Juhtimissõltuvuse esinemisel pole võimalik määrata käskude
täitmise
järjekorda enne nende töötlemist. Juhtimissõltuvus
piirab käskude rööptöötluse võimalusi. Kaks programmifragmenti
(Fi ja Fj) on teineteisest sõltumatud, st neid võib ja saab
töödelda, kui on täidetud järgmised nõuded: Olgu
programmifragmendi Fi sisendmuutujateks muutujad Ii ja
väljundmuutujateks muutujad Oi. Programmifragmendi Fj
sisendmuutujaiks on muutujad Ij ja väljundmuutujaiks muutujad Oj.
Programmifragmendid Fi ja Fj on
rööpselt töödeldavad kui: Ij ∩
Oi = Ø, Ii ∩ Oj = Ø, Oi ∩ Oj = Ø
36. Sünkroniseerimine rööptöötlusel.Rööpselt töödeldavad protsessid või nende lõimed võivad
samaaegselt vajada ühiskasutuses olevaid ressursse. Seetõttu on
vajalik rööptöötluse korral sünkroniseerida (koordineerida)
ühiskasutatavate ressursside kasutamist erinevate protsesside
(lõimede) vahel. Vältimaks konkurentsi, rakendatakse programmides
erinevaid riist- ja tarkvaralisi vahendeid. Näiteks riistvarapõhisel
sünkroniseerimisel on levinud lukustuste //lock// ja barjääride
//barrier// kasutamine, tarkvarapõhine sünkroniseerimine toimub kas
ühiskasutusmälu või spetsiaalsete ühiskasutusmälu käskude
(RMW-käskude //readmodify- write//) abil.
37. Gustafson-Barsise seadus, selle võrdlus Amdahli seadusega
(rööpsüsteemide korral).Kuivõrd suurt efekti võib saavutada rööptöötluse rakendamisest,
seda saab hinnata Gustafsoni (Gustafson-Barsis) seaduse (1988) abil.
Gustafson tuli järeldusele, et ülesanded, kus esineb mahukaid
korduvaid andmekogumeid on hästi rööbistatavad. Kui rööbistatud
programmi töödeldakse p protsessorist koosnevas süsteemis, siis
infotöötlus kiireneks selles SG(p) korda, st: SG(p) = g + p×(1-g)
= p + (1-p)×g, kus g – jadamisi täidetava (mitterööbistatava)
osa suurus programmist,
parameeter g võib omada arvulisi väärtusi
vahemikus 0 kuni 1. Programmi rööbistamise läbi saavutatavat
kiirendust (SA(p)) hinnatakse sageli ka Amdahli seaduse abil:
SA(p)=1/(g+(1-g/p))-O(p). Tuleb arvestada, et programmi rööptöötlusel
p protsessori abil on saavutatav arvutuslik kiirendus Gustafsoni
reegli alusel arvuliselt märksa suurem (optimistlik hinnang), kui
Amdahli reegli järgi (pessimistlik hinnang) leitu.
38. Rööpsüsteemide skaleeritavus.Rööpsüsteemide skaleeritavus iseloomustab süsteemide võimet
suurendada informatsiooni läbilaskevõimet, kui süsteemis
protsessorite (protsessorelementide) arv kasvab (p↑). Rööpsüsteem
on skaleeritav, kui tema
efektiivsust E(p) = S(p)/p saab hoida
konstantsena (E(p) = fix.) ka sellisel juhul, kui süsteemis
talitlevate protsessorite (protsessorelementide) arv suureneb
töödeldava infomahu (süsteemis töödeldava probleemi
infomahukuse) suurenemisel.
39. Tegumi teralisuse olemus.Tegumi teralisus (G) iseloomustab seda, kui palju aega tegumis
kulutatakse tegumi töötlusel (Tt) ja kui palju aega andmevahetuseks
(Te) teiste tegumitega: G=Tt/Te. Eristatakse peeneteralist
//fine-grain// ja jämedateralist //
coarse -grain// rööpsust.
40. Arvutiarhitektuuride Flynni taksonoomia.Üks levinumaid süstemaatikaid arvutiarhidektuurides. Töötati
välja 1960-ndate aastate keskel Michael J. Flynni poolt - nn
voogklassifikatsioon. Flynn klassifitseeris arvuteid sõltuvalt
sellest, mitut andme- ja käsuvoogu sai arvutis samaaegselt töödelda.
Käsuvoog moodustub protsessoris töödeldavate käskude jadadest,
andmevoog aga operandide jadadest. Flynni taksonoomia kohaselt
eristatakse nelja erineva arhitektuuriga arvuteid:
SISD (1 käsuvoog
ja üks andmevoog),
SIMD ( 1 käsuvoog, mitu andmevoogu),
MISD (mitu
käsuvoogu ja 1 andmevoog),
MIMD (mitu käsu- ja andmevoogu)
41. Multiprotsessorsüsteemide ühendusvõrkude topoloogiad,
näited (välja jääb oomegavõrk).Kaasaegne multiprotsessorsüsteem koosneb protsessorelementidest ja
neid omavahel ühendavatest sidekanalitest.
Viimased korraldatakse
enamasti mingi tüüpilise sidevõrgu topoloogilise lahenduse
põhimõtete kohaselt. Sidevõrkude topoloogilistes lahendustes
kasutatakse sageli järgmisi klassikalisi lahendusvariante:
Siinvõrk
Tegemist on tähttopoloogia erijuhuga, kus
keskseks elemendiks on
passiivne siin. Siinvõrgu topoloogiat kasutavad ka paljud
traadita sidevõrgud. Võrgu sõlmede omavaheline sidestus on lihtne ja võrgu
teostus on odav, kuid rike siinis halvab kogu võrgu. Samuti on võrgu
infoläbilase madal, sest igal ajahetkel saan andmeedastust läbi
viia üks sisendsõlme ja väljundsõlme paar. Siintopoloogiat
kasutati varem sageli kohtvõrkudes.
Ringvõrk Võrgu
topoloogilises lahenduses on
igasse võrgusõlme ühendatud kaks
ruuterit – üks neist võimaldab pärisuunalist ja teine
vastupidise suunaga andmeedastusi. Võrgu struktuur võimaldab
kergesti korralda võrku kuuluvate sõlmede tehnilise seisundi
testimist.
Silmvõrk Silmvõrk (silmusvõrk)
moodustatakse täielikult sidestatud võrgust osade linkide
eemaldamise teel.
Tähtvõrk Tähtvõrgu keskpunktis
asuvat sõlme nimetatakse kontsentraatoriks. Kontsentraator
organiseerib võrgus teatiste edastamist andmealliksõlme ja
andmeneelu sõlme vahel. Võrgu sõlmede arvu piirab harilikult
kontsentraatorsõlme
portide arv. Kui võrgus kasutada mitut
kontsentraatorit, mis on omavahel hierarhiliselt ühendatud, siis
moodustub puutopoloogiaga võrk.
Puuvõrk Puuvõrgu
topoloogias avaldub selgesti võrgu sõlmede topoloogiline hierarhia.
Üks sõlm, asub hierarhia kõrgemail tasemel, on nn juursõlm //root
node //, millega ühendatakse madalamate tasemete sõlmed. Tasemete
arv puuvõrgus pole piiratud, kuid minimaalne tasemete arv puuvõrgus
on kolm. Kui puuvõrgus oleks vaid kaks taset, siis muutuks puuvõrk
tähtvõrguks.
42. Andmesidevõrke iseloomustavad näitajad.Sõlme (tipu) aste – võrgu sõlmega ühendatud kanalite
arv;
läbilase – maksimaalne teatiste arv, mida võrk suudab
edastada ajaühikus;
latentsus, viide – aeg, mis kulub
võrgus info edastamiseks infoallikast infoneelu;
ühenduvus –
võrgu sõlmede arv, mis on vahetus
naabruses antud sõlmega, st
sõlmede arv, kuhu antud sõlmest jõutakse ühe hüppega;
diameeter – maksimaalne sõlmede arv, mida
teatis läbib oma
teel andmeallikast andmeneelu;
keskmine kaugus – võrgu kahe
sõlme vahelist keskmist kaugust mõõdetakse linkide arvuga, mis
jääb nende kahe sõlme vahele kõige otsesema tee puhul võrgus;
võrgu riistvara keerukus – riistvara keerukus on võrdne
võrgu kõikide linkide ja kommutaatorite
summaga ;
võrgupoolitus
– minimaalne linkide arv (BS), mis tuleb sidevõrgust kõrvaldada,
et moodustuks kaks võrdset sümmeetrilist võrgupoolt;
laiendatavus
– iseloomustab seda, kuivõrd kerge on olemasoleva võrgu
struktuuri laiendada täiendavate
moodulite abil;
regulaarsus
– iseloomustab, kuivõrd kõrge on korduvuse aste võrgu
struktuuris.
43. Sidevõrkudes kasutatavad ruutimise põhiprotokollid.1. Kanalikommutatsioon //circuit switching//: korral
luuakse esmalt side võrgus
allik - ja neelusõlme vahel. Teised samaaegselt
sidevõrgus viibivad teatised ei saa mingile teatisele juba eraldatud
andmeteed kasutada enne, kui see teatis on andmetee vabastanud, st
temaga seotud andmeedastuse
seanss on lõppenud.
2.
Pakettkommutatsioon //packet switching//; Pakettkommutatsiooni
korral jaotatakse teatis väiksemateks
osadeks ehk pakettideks. Iga
pakett varustatakse päisega, milles sisaldub sihtsõlme aadressiga,
mille põhjal toimub edastusel
paketi suunamine läbi sidevõrgu
sõlmede.
Paketid sisestatakse sidevõrku ilma, et eelnevalt oleksid
neile reserveeritud
lingid . Paketi liikumisel sidevõrgus läbib
pakett igal hüppel ainult ühe sõlme.
3. Ussiaukkommutatsioon //wormhole switching// kujutab kahe
eelneva, kanalikommutatsiooni ja pakett-kommutatsiooni, hübriidi.
Sõnum jaotatakse samuti üksikuteks edastusüksusteks flit(t)ideks
//flow control digits, flit//, neist igaüht edastatakse andmeneelu
üht kindlat andmeteed pidi nagu see toimub kanalikommutatsioonil.
44. SISD- ja SIMD-arhitektuurid.SISD-arhitektuuriga arvutis koordineerib juhtüksus (CU)
käskude töötlemist, ohjates eeskätt käsuvõtu-töötluse
faase .
Juhtüksus viib läbi käskude jadavõttu arvuti mälust (MU) ja
suunab need protsessori töötluselementi ehk töötlusüksusesse
(EU).
SIMD-arhitektuur esindab eeskätt varasemaid
rööptöötlusele orienteeritud arvuteid, selle arhitektuurse mudeli
tüüpilisteks esindajateks on maatriksiprotsessorid.
SIMD-arhitektuuriga arvuteis on tüüpiliselt teatav arv lihtsaid
homogeenseid töötlevaid üksusi (EU), mis ühendatakse
moodulkorraldusega mäluga. Mälu moodustavad mälumoodulid (MU),
mida kasutatakse töötlusüksuste (EU) poolt, on kas ühiskasutuses
või siis hajuskasutuses.
45. MISD-arhitektuur.MISD-arhitektuuril puudub senini reaalne esindaja, kuigi kirjanduses
on väidetud, et põhimõtteliselt võiks selle arhitektuurse
lahenduse
esindajaks pidada süstoolset maatriksit.
Süstoolne maatriks moodustatakse suhteliselt
lihtsatest töötlevatest
elementidest ehk süstolitest, kuhu suunatavaid operande töödeldakse
konveiertöötluse põhimõttel, st jadamisi samm-sammult.
46. MIMD-arhitektuur.MIMD-arhitektuuri korral taliteb iga arvuti struktuuri kuuluv
töötlusüksus (EU), sõltumatult teistest struktuuri kuuluvaist
töötlusüksustest, individuaalse käsu ohjel, kasutades antud käsus
ette nähtud andmeid (operande). Iga töötlusüksuse talitlust ohjab
otseselt individuaalne juhtüksus (CU), mis koos töötlusüksusega
(EU) moodustavad protsessori. Tavaliselt varustatakse iga
töötlusüksus individuaalse lokaalmäluga (MU).
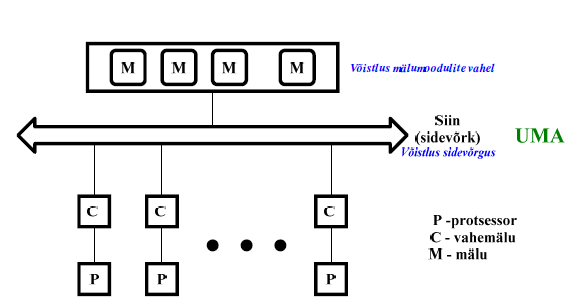
47. UMA-mudel.UMA-mudeli puhul on mälu juurdepääsetav kõigile protsessoritele
(protsessorelementidele) ühetaoliselt läbi siini (sidevõrgu).
Antud arhitektuurset
lahendust nimetatakse tihesidestusega
arhitektuuriks, sest toimub ressursside intensiivne ühiskasutus.
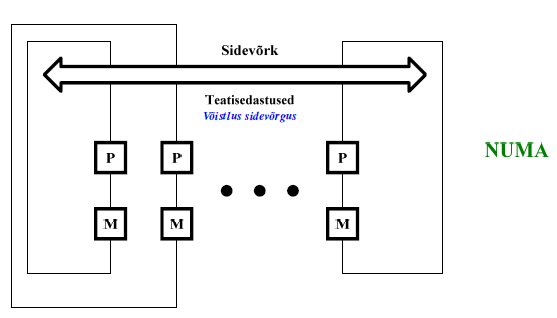
48. NUMA-mudel.Iga protsessor on varustatud individuaalse mäluplokiga ühiskasutuses
olevast mälust, kuid programmist näeb ühiskasutusega mälu aga
ühtse globaalse aadressiruumina. NUMA-mudel esindab loogilise
struktuurina ühiskasutusmälu, kuid füüsilise struktuurina
jaotatud mälu. Tegemist on nõrksidestusega ehk hajusa
mäluarhitektuuriga.
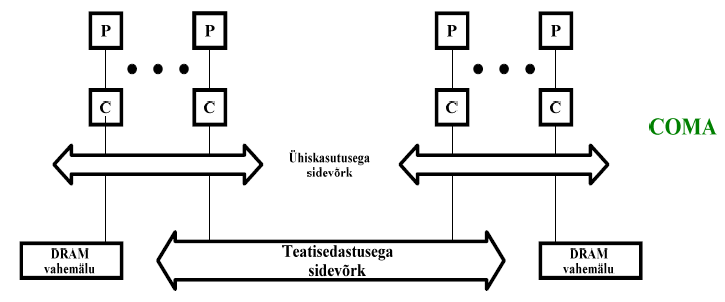
49. COMA -mudel (sh CC-COMA).COMA-
mudelis talitleb globaalmälu kas kui otsevastendus- või
moodul-assotsiatiivse vahemäluna. Füüsline mäluruum jaotatakse
vahemälu ridadeks, mida edastatakse süsteemis vastavalt
protsessoreilt saabuvatele nõudlustele.
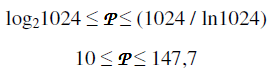
50. Rööparvutite jõudluse ligikaudne hindamine.Rööparvuti, mis sisaldab p protsessorit (protsessorelementi),
jõudlus ei kasva võrdeliselt süsteemi lisatavate protsessorite
arvuga.
Rööparvuti, mis koosneb homogeensest protsessorist
(protsessorelemendist), arendab hinnanguliselt, võrreldes üksiku
protsessoriga , jõudlust (
Ƥ) vahemikus log2 p kuni
Kui rööparvutis (multiprotsessorsüsteemis) on 1024
protsessorelementi (p = 1024), siis selline süsteem, võrreldes
üksiku protsessoriga, arendab jõudlust, mis jääb vahemikku:
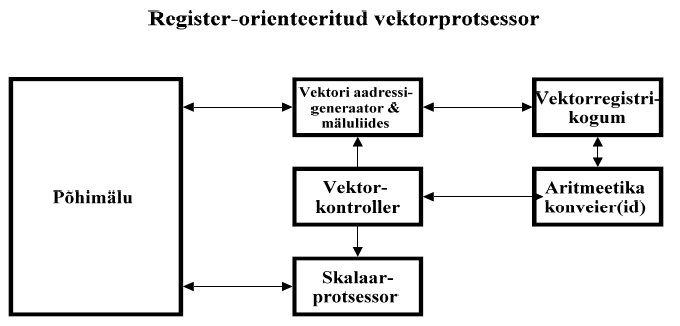
51. Vektorprotsessorite struktuurid (mälu-orienteeritud ja
register-orienteeritud).52. Vektorprotsessori põhimälu, skalaarprotsessor,
vektorkontroller, vektori aadressigeneraator ja mäluliides,
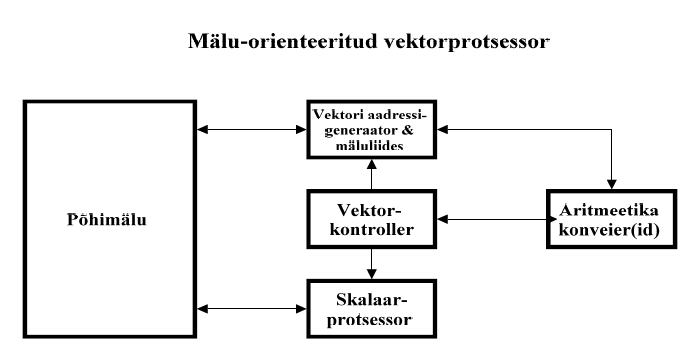
aritmeetikakonveier, vektorregistrikogum.Põhimälus säilitatakse käske ja andmeid. Põhimälu
toimekiirusest sõltub otseselt protsessori jõudlus, sest
vektorandmete töötlusel on
liiklus mälu ja töötlusüksuste vahel
väga intensiivne.
Skalaarprotsessor töötleb skalaarkujul
esitatavat informatsiooni, mis on seotud programmi juhtimisega,
vektortöötluse käivitusega, suhtlusega operatsioonisüsteemiga ja
sisend-väljundoperatsioonide juhtimisega.
Vektorkontroller
dekodeerib vektorkäske, sooritab operandide
aadresside töötlust,
käivitab vajadusel mäluliidese kontrolleri talitluse, käivitab
aritmeetikakonveieris andmetöötluse ja ohjab kõigi nimetatud
seadmete talitlust.
Vektori aadressigeneraator ja mäluliides
– üksuse (vektorite laade-salvestusüksuse) ülesandeks on tagada
kiire andmevahetuse aritmeetikakonveieri ja mälu vahel. Üksus saab
vektorkontrollerilt operandide aadresse ja formeerib nende alusel
jadapöördusi mälu poole, et varustada aritmeetikakonveierit
(konveiereid) töödeldavate andmevektorite elementidega.
Aritmeetikakonveieris sooritatakse mälust saabunud
vektorandmete elementidega käsus ette nähtud infoteisendused ning
salvestatakse saadud tulemid mällu või vektorregistrisse.
Aritmeetikakonveierid võivad olla kas
universaalsed –
polüfunktsionaalsed või piirduda vaid ühe kindla andmeteisendusega
liigiga – monofunktsionaalsed.
Vektorregistrikogum –
erinevalt mäluorienteeritud vektorprotsessorist, kus vahetult
töödeldavad vektorandmed ja töötlusel saadud tulemid asuvad
põhimälus, säilitatakse registerorienteeritud vektorprotsessoris
vahetult töödeldavad vektorandmed ja töötlusel saadud tulemeid
spetsiaalses vektorregistrikogumis. Vektorregistrikogumil on vähemalt
2 lugemis- ja 1 salvestusport.
53. Tüüpilised vektorkäsud. Vektor -vektor operatsioon (operatsioon kahe
vektormuutuja vahel, tulemiks on samuti vektor);
vektor- skalaar operatsioon (operatsioon vektor- ja skalaarmuutuja vahel,
tulemiks on vektor);
vektor-mälu operatsioon
(vektorregistri
laadimine või vektorregistri sisu
salvestamine mällu);
vektor reduktsioon (operatsioon
vektormuutujal, mille tulemusena saadakse skalaarmuutuja);
maskimine
(käsk, mida kasutatakse vektorkäskude tingimuslikul töötlemisel.
Protsessoris olevasse maskiregistrisse (MR) salvestatud maskivektori
järkude väärtused määravad vektoroperandi need elemendid, mis
osalevad antud vektoroperatsioonis).
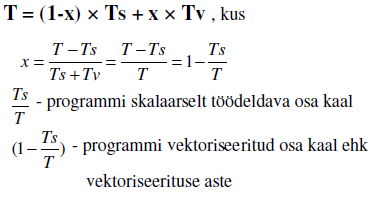
54. Vektoriseeritud programmi töötlusaeg.T – programmi summaarne töötlusaeg
Ts – programmi skalaarse osa töötlusaeg
Tv – programmi vektoriseeritud osa töötlusaeg
x – programmi vektoriseerituse aste
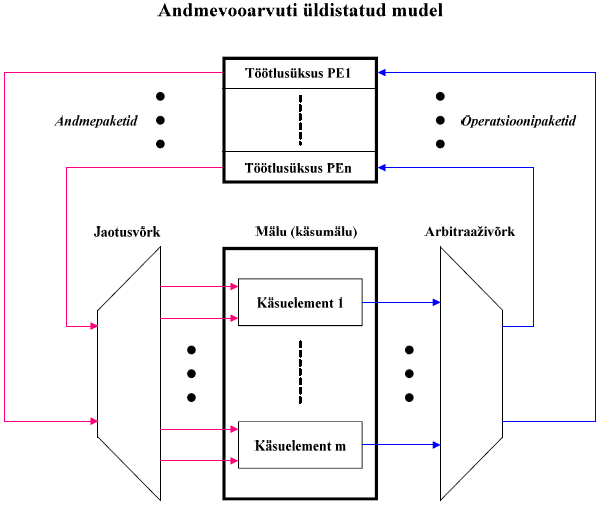
55. Andmevooarvuti üldistatud mudel.Andmevooarhitektuuride iseloomulikuks
tunnuseks on käsutöötluse korralduse
paradigma a, kus käskude
töötlust alustatakse koheselt, kui
neis kasutatavad
operandid on
töötlusvalmid.
Andmevooarvutile iseloomulikud tunnused:
1. Asünkroonsus
(käsutöötlust alustatakse vaid juhul,
kui käsus rakendatavad operandid
on kasutusvalmis); 2. Funktsionaalsus
(mis tahes kaht töötlusvalmit käsku
võib töödelda suvalises järjekorras
või rööpselt).
56. Üldpõhimõtted informatsiooni töötlemisel andmevooarvutis
(töödeldavuse ja käivituse reeglid).A.
Töödeldavuse reegel //
enabling rule //
Käsk on
töödeldav, kui kõik temas vajatavad operandid on kasutuskõlblikud.
B.
Käivituse reegel //
computational rule,
firing
rule// Käsutöötlust alustatakse (käivitatakse) ainult siis, kui
ta on töödeldav.57. Erinevused staatilise ja dünaamilise andmevooarvuti vahel.Staatilise andmevoolumudeli korral on igale
andmevoograafi tipule eraldatud vaid üks luba. Seetõttu kehtib neis
infotöötlusel käivituse piirang – infoteisendus käivitatakse
graafi tipus vaid juhul, kui selle tipu mis tahes väljundkaarel ei
ole formeeritud luba (st kõik väljundkaared on “tühjad”).
Dünaamilises andmevooarvutis käivitatakse tipus
infotöötlus vaid tingimusel, et selle tipu kõigil sisendeil
(sisendkaartel) eksisteerivad load identsete siltidega. Tipu
väljundkaartel võivad esineda load. Ühel väljundkaarel võib
samaaegselt esineda mitu luba.
58. Staatilise ja dünaamilise andmevooarvuti mudelid.59. Andmeskalaarse protsessori talitluse põhimõtted.Andmeskalaarse arhitektuuriga protsessoris toimub jadaprogrammi
töötlemine liiasusega, paralleelselt (asünkroonselt) mitmel
protsessoril või protsessorüksusel (PÜ). Kõik protsessorüksused
töötlevad üht ja sama programmi, st neis toimub asünkroonselt
ühtede
samade käskude ning andmete töötlemine. Protsessorüksuste
kasutuses olev mäluruum jagatakse, sõltuvalt andmete päritolust,
kaheks: dubleeritud //replicated// andmete ja
edastatud //communicated// andmete mäluruumiks.
60. Andmeskalaarses protsessoris laade- ja salvestusoperatsioonide
korraldus dubleeritudja edastatud andmeid sisaldavais mäludes.1) Eeldame, et protsessorüksustes toimuvad erinevad
laadeoperatsioonid (ld-1, ld-2) ja salvestusoperatsioonid (st-1 ja
st-2), millesse on kaasatud dubleeritud - ja edastatud andmete
mäluruumi osas paiknevad operandid. 2) Operatsioonid ld-1 ja st-1
PÜ1-s ja PÜ2-s on seotud andmevahetusega protsessorüksuste
dubleeritud andmete mäluruumi osas asuvate andmetega ja võivad
toimuda rööpselt mõlemas protsessorüksuses. 3) Laadeoperatsioon
ld-2 on seotud andmetega mida
valdab protsessorüksus PÜ1, seetõttu
peatatakse protsessorüksuses PÜ2 infotöötlus
seniks , kuni PÜ1 on
läbi globaalsiini edastanud vajalikud andmed (operandi) PÜ2-le.
61. Spekulatiivtöötluse rakendamine andmeskalaarses
protsessoris.Andmeskalaarne protsessor toetab spekulatiivtöötlust, mis tuleneb
käskude järjekorravälisest töötlusest, mistõttu tuleb
protsessoris erilist tähelepanu pöörata andmete korrektsele
leviedastusele. Spekulatiivtöötlust võib protsessorüksustes läbi
viia kahel viisil: 1. Andmete spekulatiivsest leviedastusest
hoidutakse seniks, kuni pole selgunud
sooritatud spekulatiivtöötluse
õiguspärasus; 2. Protsessorüksus alustab spekulatiivtöötluse
käigus kasutatavate andmete leviedastusega, kuid niipea kui
selgub ,
et spekulatiivtöötlus polnud õiguspärane, siis koheselt teavitab
ta teisi protsessorüksusi sellest, et levitatud andmed olid
kehtetud.
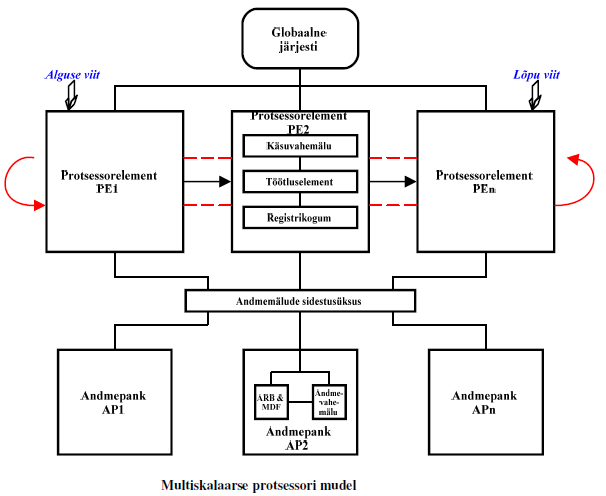
62. Multiskalaarse protsessori mikroarhitektuurne mudel.63. Programmi ettevalmistamine töötluseks multiskalaarses
arvutis.Et tavalist jadaprogrammi saaks multiskalaarses protsessoris
töödelda, tuleb see eelnevalt ette valmistada. Lähteprogrammi
kompileerimise käigus esitatakse programm juhtvoograafina (JVG),
mille tippudes asuvad programmi baas- ehk põhiplokid. Graafi
kaared näitavad programmis käsuvoogude
kulgu ühest põhiplokist teise.
64. Juhtimis- ja andmesõltuvused multiskalaarse protsessori
tegumites.Tuleb eristada juhtimissõltuvusi, mis tekivad tegumi sees ja mis
tekivad tegumite vahel. Lähtuvalt JVG-st, töödeldakse tegumeid
järgnevuses: R1 -> R2 -> R3. Tegumi käskude töötlemisel
saadakse tulemid (andmed), mida kasutatakse nii tegumi sees kui ka
teiste tegumite poolt. Kui on tegemist käsutöötluse tulemitega,
mida moodustatakse ja tarbitakse tegumi sees, siis ei kujuta
andmesõltuvused erilist probleemi. Andmeid
tootva käsu poolt
moodustatud tulem salvestatakse kas registritesse või mälupesadesse,
kust andmeid tarbiv käsk neid loeb.
65.Andmevahetuse korraldus multiskalaarses protsessoris.Skalaarne protsessor on protsessor, kus ajaühikus (näiteks
ühes protsessortaktis) suunatakse töötlemisele kuni üks käsk.
Andmeskalaarses protsessoris toimub ühe ja sama jadaprogrammi
rööpne töötlemine suurt hulka protsessorüksusi sisaldaval
kogumil, kasutades hajutatud andmekogumeid. Andmeskalaarne protsessor
toetab käskude järjekorravälist ning andmete spekulatiivtöötlust.
Multiskalaarses protsessoris jaotatakse töödeldav
jadaprogramm üksikute tegumite kogumiks, mida töödeldakse rööpselt
suurel hulgal protsessorelementidel. Multiskalaarses protsessoris
rakendatakse spekulatiivset töötlust juhtimise ja andmesõltuvuste
tasemel.
66. Protsessorarhitektuuride arengusuundi .1. Ühe lõime töötluse kiirendamine: Rakendatakse rohkem
spekulatiivset käsutasemelist rööpsust. 2. Mitme lõime töötluse
kiirendamine: Rakendatakse, lisaks käsutasemelisele rööpsusele,
lõimetasemelist rööpsust. 3. Ühelõimeliste rakenduste töötluse
kiirendamine multilõimtöötluse läbi: Multiskalaarne protsessor,
andmeskaalaarse protsessor, jäljeprotsessor. 4.
Erilahendused :
Protsessor mälus ehk arukas RAM; Rekonfigureeritava struktuuriga
(mikroarhitektuuriga) protsessor; Asünkroonne protsessor.
67. Makimoto laine.Mikrolülituste arendamisel esineb teatav korrapärasus
(tsüklilisus), mida on hakatud nimetama Makimoto laineks. Keskmiselt
iga 10 aasta järel leiab mikrolülituste projekteerimisel ja
tootmisel aset ümberlülitumine standardiseerimiselt
//standartization// kohandamisele //customization//.
Standardiseerimise korral on tegemist toodete, alates transistoridest
kuni mikroprotsessorite ja programmeeritava loogikani (FPGAd),
orienteeritusega üldisusele, standardsele kvaliteedile. Kohandamise
korral on tegemist toodete, alates rakendusorienteeritud
lausintegraallülitustest kuni kiipsüsteemide (SoC
//system-on-a-chip//) ja kiipide süsteemideni (SiP
//systems-in-package//).
68. Assemblerikeele kasutamine arvutite programsel juhtimisel
( praktikum ).Protsessorsõltuv. Keele kasutamine eeldab protsessori arhitektuuri
ja talitluse detailset tundmist. Programm kasutab mäluruumi
säästlikult, programmi töötlusaeg on lühem aga
programmeerimine on tülikas (keerukas) ja keel ei ole kasutajasõbralik.
Arvutiprogramm tuleb transleerida (
virtuaalmasina puhul
interpreteerida) masinakoodi.
69. Assemblerikeelse programmi transleerimine masinakeelde
(praktikum).Assamblerikeelne programm (masinast sõltuv madalataseme keel) ->
assambleri programm (transleerimine) -> masinakood. Translaatorina
kasutatava programmi ülesanne on lähtekeelse, kas masinast
sõltumatu kõrgkeelse või sõltuva madaltaseme keelse, programmi
teisendamine masinakeelde.
70. Pseudokäskude (direktiivide) kasutamine kompilaatori ohjel
(praktikumis kasutatudsimulaatori näitel).Assemblerikeeles kasutatakse lisaks masinakäskudele veel ka
pseudokäske ehk
direktiive .
Direktiivid muudavad assemblerikeelse
programmi kasutamise mugavamaks. Pseudokäsud annavad assemblerile
täiendavat infot, kuid nad ei genereeri koodi. Oma
funktsionaalse otstarbe järgi võivad direktiivid olla jaotatud veel klassidesse –
nimede defineerimise direktiivid (näiteks Db), transleerimise
juhtimise direktiivid (näiteks Org) jt. Sageli eristatakse
assemblerikeeltes direktiive sellega, et direktiivi mnemooniline
tähistus algab alati
punktiga , näiteks .end või .begin.
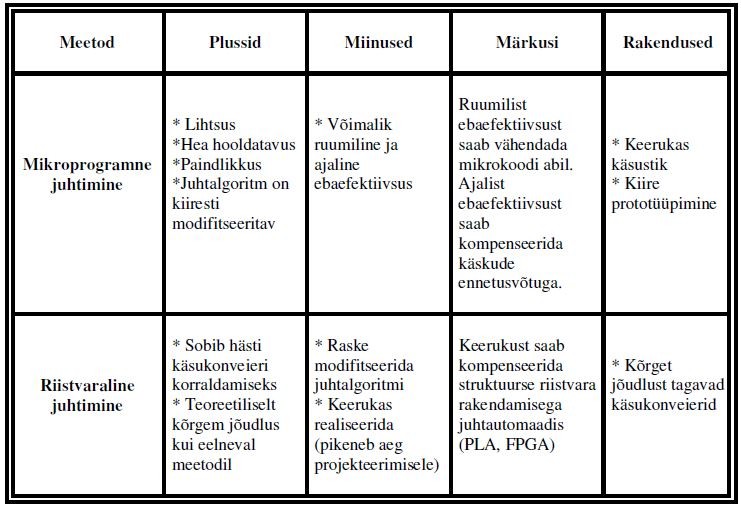
Protsessori juhtimismeetodite võrdlus






































Kõik kommentaarid