Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks
Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks
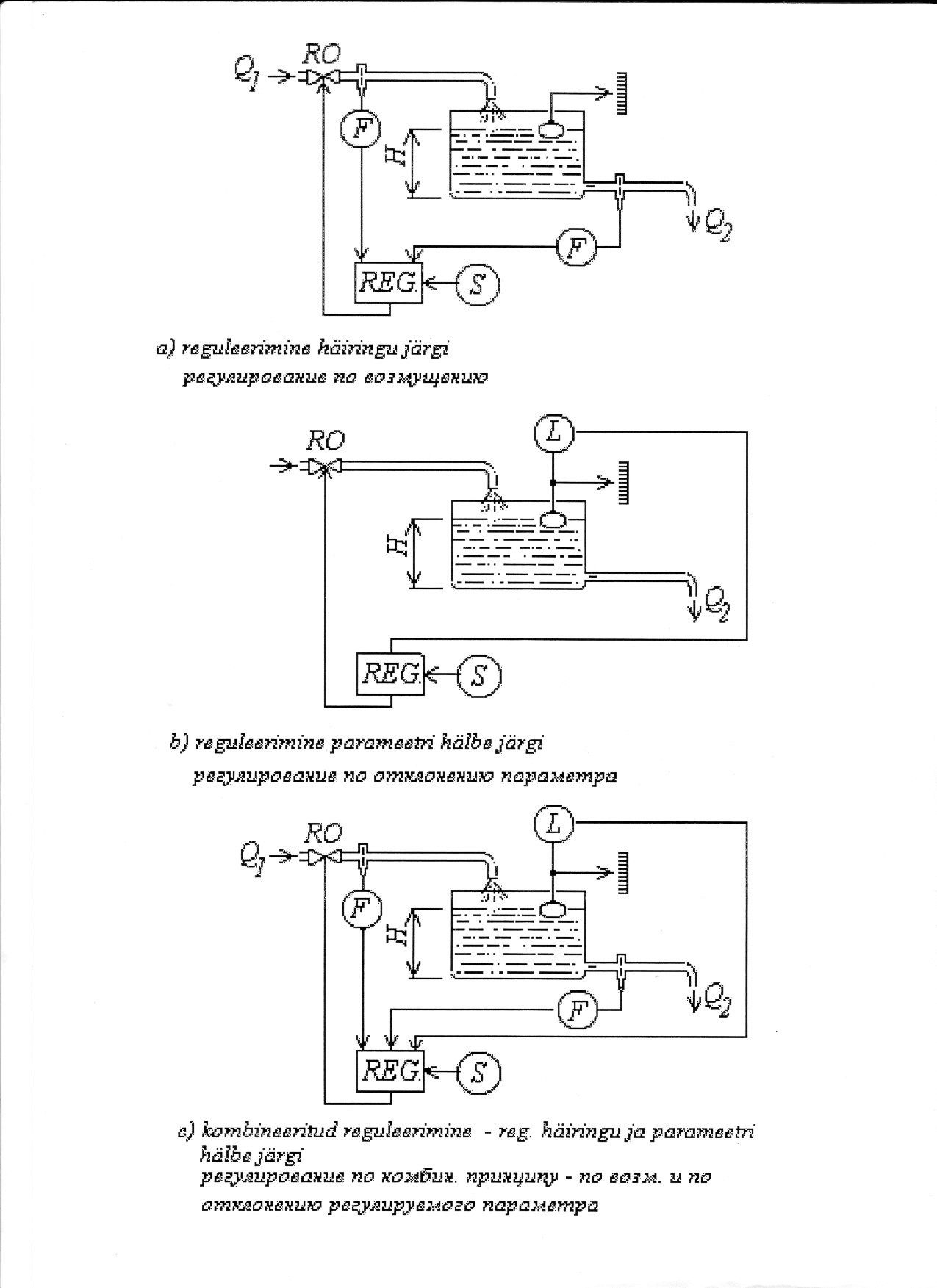
Suletud reguleerimissüsteemi struktuurskeem ja tööpõhimõte. P Programmseade (nukkvõll, tiftidega ketas, perfolint või arvutimälu). Annab ette sätte y0(t). A - Andur muundab väljundsignaali ülekandmiseks ja võrdlemiseks sobivaks suuruseks. VE - VõrdlusElemendi väljundis tekib vea signaal (). V Võimendi võimendab veasignaali. TM Võimendi väljundsignaal mõjub TäituvMehhanismile, mille kaudu regulaator mõjutab Reguleerivat Elementi. RE Reguleeriv Element mõjutab Objekti, muutes sellelel antavalt ainet või energia hulka. Tagasiside. Tagasiside on väljundi mõju sisendile. Positiivse tagasiside korral on sisendisse tagasi antav signaal sisendsignaaliga samas faasis ja seega tugevdab üldist sisendsignaali. Negatiivse tagasiside signaal on sisendsignaaliga vastasfaasis ja seega nõrgendab üldist sisendsignaali.
Juhtimine ja automaatjuhtimine.Küberneetika? Juhtimiseks nim mingi saada tajureid, mille mahtuvus C on lineaarses sõltuvuses paagis oleva vedeliku masina või protsessi mõjutamist, nii et selle töö annaks soovitatud tulemuse. ruumalast V, s. t. C = c V, kus c on tajuri erimahtuvus Juhtida võib inimene või masin ise. Käsitsijuhtimise korral on kõik Induktiivtajurid?-Induktiivtajuriteks nimetatakse suurt rühma tajureid, kus juhtimisfunksioonid usaldatud inimesele. Automatiseeritud juhtimisel on need sisendsuuruse (deformatsiooni, nihke, jõu, momendi) muutus põhjustab jaotatud inimese ja automaatide vahel. Automaadid täidavad funksioone ,mida elektromagnetilise süsteemi induktiivsuse muutumist. Lugedes suhteliselt inimene pole füüsiliselt võimeline täitma, või pole inimesle vastuvõetavamad. väikese õhupiluga ferromagnetilises süsteemis puistevoo tühiseks, võib mähise Automaatjuhtimisega
vedeliku tootmiseks ja tarbijale edastamiseks. Katlas toimub mingi energialiigi muundamine soojuseks ning vee (või ka termoõli) kuumutamine ja vee aurustamine selle soojuse arvel. Soojuse saamiseks võib kasutada kütuse keemilist energiat, elektrienergiat, otsest päikese energiat jne. Tänapäeval kasutatakse siiski kõige rohkem orgaanilise kütuse energiat. Seepärast vaadeldakse käesolevas konspektis katlaid, kus soojus saadakse orgaanilise kütuse põlemisel. Katel koosneb koldest ja erinevat liiki küttepindadest, mis võivad olla paigutatud ühte või mitmesse korpusesse. Kolle on ettenähtud kütuse põletamiseks ja küttepinnad vabanenud soojuse ülekandmiseks põlemisproduktidelt vedelikule, aurule või põlemisõhule. Aurutootva katla ehk aurukatla küttepinnad ja nende otstarve on järgmised: · toitevee eelsoojendis ehk ökonomaiseris tõstetakse katlasse antud vee
sile ja membraan puhul on soojusvoog toru laupinnal või selle lähedal mõlematel juhtudel üsnagi võrdne. Pealelangeva soojusvoo erinevus perimeetri ulatuses tingib mõlemate torude korral soojusliku ebaühtluse kus soojuskoormus laupinnal on oluliselt suurem kui toru tagaküljel Joonis 12-5. Soojusvastuvõtt ekraantorus: paremal membraantoru, vasakul - siletoru Membraan torude korral liigub soojus piki rib; tipust aluse poole. Seega soojuskoormus ribi aluse piirkonnas kasvab ja teatud tingimustes võib see isegi olla suurem kui membraantoru lauppinnal. Metalli töökindluse seisukohast on tähtis, et soojuse äravool küttepinnalt toimuks vastvõetava metallitemperatuuri tingimustes, mis võimaldaks toru metalli pikaajalist normaalset tööd. Arvutusliku toru metallitemperatuuri ts all mõistetakse suurimat kohalikku
Kontrolltöö nr.1D 1.Põhimõisted (defineeri): Andur. Tajur. Reguleeriv organ. Võimendi. Täitur. Andur on automaatsüsteemi osa, mis muundab kontrollitava füüsikalise suuruse (parameetri) teiseks suuruseks, mida on parem võimendada, mõõta või juhtimiseks kasutada. Tajur on välistoimele tundlik ning sellele vahetult reageeriv anduri osa Reguleeriv organ element, mis vahetult mõjub reguleerimisobjektile reguleeritava suuruse hoidmiseks nõutud tasemel. Võimendi on seade milles teostatakse sisendsignaali võimsuse suurendamine välise energiaallika abil. Täitur on regulaatori element, mis läbi anduri ja võimendi tulevale signaalile (korraldusele) reageeri. Selleks võib olla elektri-, hüdro-, või pneumomootor, solenoidventiil, kraan, siiber jne. 2. Automaatsüsteemide klassifikatsioon (defineeri): Automaatsignalisatsioonisüsteemid (ASS). Laeva automaatikaseadmed klassifitseeritakse: A. Otstarbe järgi: 1.Juhtimisseadme
TALLINNA TEHNIKAÜLIKOOL MEHHAANIKATEADUSKOND SOOJUSTEHNIKA INSTITUUT KATLAPROJEKT Tallinn 2007 Sisukord: Seletuskiri: Katla kirjeldus. Omapoolsete valikute põhjendus Kokkuvõte (A Brief summary of the project) Arvutused: Algandmed Põlemisproduktide arvutus Katla soojusbilansi arvutus Kolde soojus ja konstruktorarvutus Festooni soojusarvutus Ülekuumendi ja järelküttepindade soojusbilansi arvutus Ülekuumendi "kuume astme" soojus ja konstruktorarvutus Ülekuumendi "külme astme" soojus ja konstruktorarvutus Ökonomaiseri soojus ja konstruktorarvutus Õhu eelsoojend soojus ja konstruktorarvutus Graafiline osa: Katla pikkilõige lisa 1 Katla ristlõige lisa 2




























































































Kõik kommentaarid