Sissejuhatus.
Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles
protsessis ja võimaldab teostada selliseid protsesse mis on
inimesele kahjulikud.
Automaatika süsteemi kuuluvad automaat kontrollimine ja
automaat reguleerimine. Esimene neist
teostab mõõtmisi ja teine teostab reguleerimist e.
parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel
reguleerimisprogrammi järgi.
Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink
või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul
automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud.
Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid.
Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika
süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaatset käivitust, reverseerimist ja peatamist.
Võimaldavad hoida mingit parameetrit kindlal tasemel või muuta seda teatud programmi järgi,
hoida parameetreid min. või maks. tasemel ja muuta ühte parameetrit nii, et ta jälgiks teist
parameetrit, mis võiks muutuda juhuslikult.
Automaatjuhtimissüsteemi
klassifikatsioon .
Determineeritud (
tavalised ) süsteemid inimese poolt antakse kogu vajalik info juhitava
objekti kohta, inimene häälestab ja kui tekib objekti parameetrite muutumine, siis peab inimene
süsteemi ümber häälestama. Süsteem ise ei ole võimeline oma struktuuri muutma. Need
süsteemid pole eriti kallid, on töökindlad, kasutatakse paljude tootmisprotsesside
juhtimiseks . Nad võivad olla:
a) lahtise kontuuriga need süsteemid ei ole võimelised kontrollima oma töö tulemusi ja need funktsioonid täidab inimene.
b) Automaatreguleerimissüsteemid.
Nendes süsteemides on olemas tagasiside mille kaudu süsteem kontrollib oma tegevust ja kui on
vaja, siis korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui
temperatuur on kõrvale kaldunud siis avab või sulgeb klapi ja taastab etteantud temperatuuri. Adaptiivsed süsteemid (küberneetilised) Nendele süsteemidele ei ole vaja ette anda kogu infot
objekti kohta. Töö käigus nad ise koguvad infot, töötlevad ja kasutavad seda oma töös. Nad
võivad muuta oma struktuuri, oma häälestusparameetreid vastavalt muutuvatele töötingimustele.
Nad õpivad ise ja organiseerivad oma tööd. Süsteemid on keerulised ja kallid kuid töökindlad.
Nendes kasutatakse arvuteid.
Automaatreguleerimissüsteemid. Põhimõisted.
ARS on alati suletud kontuuriga süsteem ja seal on kaks põhiseadet:
regulaator ja objekt.
ARS sisaldab kahte põhikomponenti regulaator (reguleerib objekti tööd) ja objekt (mis on
reguleeritav. võib olla mootor, seade, protsess).
1) reguleeritav
parameeter Suhtelisi ühikuid kasutatakse sellepärast, et nende abil saab võrrelda omavahel erineva
dimensiooniga parameetreid.
2) häired mis mõjuvad
objektile ja
kutsuvad esile muutumist.
3)µ - reguleeriv toime. Sellega reguleeritakse parameetreid objektis. Näiteks klapi
avamine . Süsteem toimib järgmiselt: regulaator tagasiside kaudu mõõdab parameetri suurust objektis ja
võrdleb seda ülesandega ja kui esineb erinevus või kõrvalekalle, siis regulaator töötab välja µ ja
selle abil reguleeritav parameeter viiakse vastavusse ülesandega. Parameeter mõõdetakse objektis
anduriga, ülesanne
seatakse seaduriga.
ARS klassifikatsioon.
ARS jaotatakse järgmiselt:
1) ülesande muutmise seaduse järgi
a) 0 =
const (Need on stabiliseerivad süsteemid, mis hoiavad parameetri kindlal tasemel)
b) 0=f (t) (Muutumine võib olla juhuslik. Neid nimetatakse järgivateks süsteemideks). Kui 0 muutub aja vältel kindla programmi järgi, siis süsteem peab täitma seda. Neid nimetatakse programmeeritavateks süsteemideks. ARS skeem võib olla järgmine:
1. Mõõteseade (koosneb andurist ja muundurist)
2. Juhtseade (võtab vastu mõõteseadmest tuleva signaali, võrdleb seda ülesandega. Võimendab
vahesignaali ja formeerib käsku, mis läheb edasi täiturmehhanismi. Tavaliselt kasutatakse
igasuguseid võimendeid mille sisenditeks on võrdluselement, mis formeerib vahesignaali). 3. Täiturmehhanism (täidab tuleva käsu ja muundab seda signaali reguleerimisseadeldise ümberpaigutamiseks. Täiturmehhanismid võivad olla igasugused
mootorid
elektrilised ,
pneumaatilised , hüdraulilised,
relee jne...).
4. Reguleerimisseadeldis (
klapid ,
siibrid , reostaadid)
5. Objekt
Reguleerimissüsteeme võib jaotada järgmiste tunnuste järgi:
1) Lisatoite järgi a) Otsetoimega, mis ei kasuta lisa toiteallikat b) Kaudse toimega
2) Reguleerimisparameetri kõrvalekalde järgi a) Staatilised (Nendes peale kõrvalekallet ei taastata täpselt parameetri endist asendit, vaid
jääb kõrvalekalle , mida nimetatakse staatiliseks
veaks .).
b) Astaatiline (Nendel süsteemidel staatiline viga puudub ja süsteem taastab endise
parameetri täpselt.)
3) Jaotatakse kontuuride arvu järgi a) Ühe kontuurilised süsteemid (ainult peatagasisidega) b) Mitme kontuurilised süsteemid. (siin on juba sisse
viidud kohalik tagasiside ja neid
võib ka rohkem kui üks olla)
4) Reguleerimisparameetrite arvu järgi
a) Ühe parameetrilised b) Mitme parameetrilised 1) Mittesidestatud (Sel juhul
regulaatorid ei ole omavahel sidestatud ja töötavad
sõltumatult. Seos on ainult objekti kaudu.). 2) Sidestatud süsteemid. Tänu sellele regulaatorite kiiretoimelisus suureneb ja
reguleerimisvead vähenevad. Teine süsteem
teatab esimesele süsteemile, et hakkab tööle.
5) Reguleerimistoime muutumise järgi aja vältel.
a) Pideva toimega süsteemid
b) Katkendliku toimega süsteemid (näiteks relee süsteemid)
Reguleerimisprintsiibid.
Määratakse sellega mis signaalile reageerib regulaator. Vastavalt sellele on olemas järgmised
reguleerimisprintsiibid:
1) Reguleerimine parameetri kõrvalekalde järgi. See on universaalne printsiip.
Reguleerimisaeg kõrvalekaldele ja hakkab tegutsema, kui kõrvalekalle ületab mittetundliku tsooni.
t0 - kõrvalekalde algus
t1 regulaatori töö algus
Selle printsiibi järgi regulaator hakkab tegutsema igal juhul sõltumata sellest, millega
kõrvalekalle on esile kutsutud. See on selle printsiibi eelis, kuid regulaator hakkab tegutsema
ainult siis, kui parameeter on tunduvalt kõrvale kaldunud ning sellest tekib reguleerimisviga.
2) Reguleerimine koormuse järgi. Sel juhul regulaator reageerib koormusele ja hakkab tegutsema
kohe, kui koormus muutub ootamata parameetri kõrvalekallet. Tänu sellele regulaator ei luba
suurte
vigade tekkimist ja kiiretoimelisus suureneb. See on eelis. Puudus on see, et regulaator ise
ei kontrolli parameetri väärtusi ja selleks, et säilitada etteantud väärtus peab ta olema väga täpne.
Selline regulaator reageerib ainult ühele signaalile. Kui aga tekib teine
signaal siis sellele peab olema oma regulaator. Sellepärast ei kasutata seda regulaatorit eraldi vaid koos esimese
printsiibiga, reguleerimisparameetri parandamiseks.
3) Reguleerimine parameetri muutumise kiiruse järgi e. reguleerimine tuletise järgi. Kui
parameeter hakkab
muutuma , siis tavaliselt algmomendil parameetri muutumise kiirus on suur ja
kui formeerida signaali kiiruse järgi ning signaal anda regulaatorile, siis hakkab ta kohe
tegutsema ootamata parameetri märgatavat kõrvalekallet. Sellega suureneb reguleerimistäpsus ja
regulaatori kiiretoimelisus.
Automaatika süsteemide tööreziimid.
Jaotatakse kahte
reziimi :
1) Staatiline on selline
reziim mille juures sisendsignaalid ja väljundsignaalid ei muutu aja vältel.
Näiteks: mootor töötab teatud kiirusega.
2) Dünaamiline reziim on selline kus
sisend ja väljund
parameetrid muutuvad aja vältel. Näiteks
mootori kiiruse suurenemine. Dünaamiline reziim eksisteerib ülemineku ajal ühest staatilisest
reziimist teise ja sellepärast nimetatakse seda siirde reziimiks. Dünaamiline reziim on elementide
ja süsteemide jaoks tavaliselt raskem kui staatiline.
Automaatika elementide ja süsteemide
karakteristikud .
Neid jaotatakse vastavalt tööreziimidele:
1) Staatilised karakteristikud kirjeldavad staatilisi reziime ja näitavad kuidas sõltub
väljundsignaal sisendsignaalist staatilises süsteemis. Neid võib ette anda võrrandi abil, tabeli
abil, graafikute abil.
a) XV=K* XS XV=C* XS2
b)
XS 0 2 3 4
XV 0 4 6 8
c)
Mittelineaarne Piiratud lineaarsusega AB lineaarne osa
Järsult mittelineaarne
Kui elemendil on lineaarne karakteristik siis nimetatakse seda lineaarseks
elemendiks . Kui
automaatika süsteem koosneb ainult lineaarsetest elementidest, siis on see süsteem lineaarne
süsteem. Lineaarse süsteemi jaoks on välja töötatud arvutusmeetodid ja neid on küllaltki lihtne
arvutada. Kui süsteemis on kasvõi üks mittelineaarne element, siis sellist süsteemi nimetatakse
mittelineaarseks süsteemiks. Nende arvutus on raskendatud, selleks kasutatakse graafilisi
meetodeid ja teisi keerulisi matemaatilisi meetodeid.
Kui mittelineaarseid elementidel kasutada tema karakteristikust väikest osa, siis võib oletada, et
selle osa piirides tema karakteristik on lineaarne.
Arvutusi võib teha kasutades lineaarsete
elementide jaoks välja töötatud meetodeid. Staatilisi omadusi iseloomustatakse staatilise
ülekande teguriga.
K= Xv / Xs
Lineaarsetel elementidel K ei sõltu karakteristiku punktidest kus teda määratakse. K on
lineaarse elemendi parameeter, millega saab selle elemendi määrata. Mittelineaarsetel elementidel K on mittekonstantne suurus ja muutub punktist punktini. Temaga
ei saa iseloomustada mittelineaarset elementi. Mittelineaarsete elementide jaoks kasutatakse veel
nn. Diferentsiaalülekande tegurit, mis määratakse sisend ja väljund signaalide juurdekasvude
kaude.
Kd karakteristiku teatud piirides jääb konstantseks ja temaga saab iseloomustada antus
mittelineaarset elementi karakteristiku antud punktis. Teda nimetatakse ülekandeteguriks väikeste
signaalide jaoks mittelineaarsetel elementidel.
Kd kasutamisega mittelineaarne karakteristik lineariseeritakse. Võetakse karakteristiku selline
osa kus Kd on
konstantne . Sel juhul tekib viga ja seda võib lubada ainult siis kui see viga ei ületa
lubatud piiri.
K=tan Kd=tan
Automaatika ühendusviisid.
Iga automaatika süsteem koosneb erinevatest elementidest, mis võivad olla omavahel kolmel
viisil ühendatud:
1) Jadaühendus
Kehtib ainult lineaarsete elementide puhul
K=K1*K2 jne.
2) Rööpühendus
K=K1+K2
Dünaamilised karakteristikud.
Näitavad kuidas muutub väljundsignaal aja vältel
sisendsignaali muutumisel. Sisend signaal
võib muutuda
erineval kujul. Ta võib olla hüppeline, impulsi kujuline, lineaarselt kasvav,
sinusoidaalne jne. Dünaamiliste omaduste uurimiseks kasutatakse sagedamini hüppekujulist
signaali, impulsikujulist signaali, siinuse kujuline.
T 0 1 2 3
XS 0 1 1 1
Xv 0 0 0,3 0,6
Dünaamilised karakteristikud võivad olla etteantud:
1) analüütiliselt a) diferentsiaalvõrrandi abil b) ülekande funktsiooni abil
2) tabeli abil
3) graafiliselt a) ajakarakteristik
4) grafoanalüütiline a) sageduskarakteristikud
Diferentsiaalvõrrand.
Diferentsiaal võrrand kirjeldab dünaamilise protsessi, mis kulgeb elementides ja diferentsiaal
võrrandi
lahend näitab kuidas muutub väljundsignaal aja vältel.
An*dXVn/dtn + An-1*dXVn-1/dtn-1 +...+ A1*dXV/dt + A0*XV = Bm*dXSm/dtm + Bm-1*dXSm-1/dtm-1 +....+
+ B1*dXS/dt + B0*XS
n väljundsignaali kõrgem
tuletis , millega määratakse diferentsiaalvõrrandi kõrgem järk
An jne koefitsiendid
XV väljundsignaal
T aeg
M sisendsignaali kõrgem tuletis.
Vasakul on väljundsignaal ja tema tuletis, paremal sisendsignaal ja tema tuletis. Kui diferentsiaal
võrrandid muutujad on 1 astmes, siis sellist võrrandit nimetatakse lineaarseks. See võrrand
kirjeldab dünaamilist protsessi
lineaarses süsteemis. Kui võrrandi parem osa ei ole võrdne
nulliga, siis sellist võrrandit nimetatakse mittehomogeenseks. See võrrand kirjeldab dünaamilisi
protsesse, mis kulgevad süsteemi sisendsignaali pideval mõjutamisel. See tähendab, et sel juhul
tekib süsteemis sund liikumine.
Kui diferentsiaal võrrandi parem osa on võrdne nulliga, siis selline võrrand on
homogeenne .
Selline võrrand kirjeldab süsteemi vaba liikumist, s.t. süsteemile oli antud algmomendil
impulss ,
millega ta oli välja viidud tasakaalust ja edasi toimub süsteemi vaba liikumine.
Selleks, et leida, kuidas muutub väljundsignaal aj vältel tuleb lahendada diferentsiaalvõrrand. See
on raske, eriti kui neil on suurema järguline diferentsiaalvõrrand. Lahendamise kergendamiseks
on välja töötatud abimeetodid. Üks
nendest on operaatormeetod.
Ajakarakteristikud .
Kasutatakse automaatikas sellepärast, et neid saab kergesti üles võtta ja määrata kõik vajalikud
staatilised ja dünaamilised parameetrid. AK näitab, kuidas muutub väljundsignaal ajavältel
sisendsignaali muutumise korral. Neid karakteristikuid võib määrata lihtsalt ja selleks on vaja
sisendisse anda muutuv signaal. Praktikas kasutatakse kahte standardset sisendsignaali:
1. Ühikhüpe sellele vastab siirdekarakteristik
2. Impulsssignaal sel juhul ei anta sisendisse mitte hüpe vaid impulss. Sellele vastavat väljundsignaali muutumist ajas nim. impulsskarakteristikuks.
Sageduskarakteristik.
Väga laialdaselt
kasutatakse
tehnikavaldkonnas. Süsteemide analüüsimiseks, sünteesimiseks ja arvutamiseks. Praktikas on
teda lihtne üles võtta, selleks antakse sisendisse
sinusoidaalne signaal mille sagedust saab muuta. Kui
sisendsignaali muutub, siis sellest muutuvad
väljundsignaali parameetrid, kui sagedus suureneb, siis
väljundsignaali
amplituud väheneb ja faasinihkenurk sisend ja väljund signaali vahel suureneb. Xs Xv
SG - sisendsignaali generaator Xsm sisend signaali amplituud
AM amplituudi mõõtja Xvm väljund signaali amplituud
FM faasimõõtja - faasinihkenurk Xs ja Xv vahel
X j W = vm *e
Sagedusfunktsioon : sm ( jw) X
Sinusoidaalsed suurused on
vektor suurused ja kahe vektori Xv ja Xs suhe on ka vektor st.
sagedusfunktsioon on
vektoriaalne suurus. Selle saab määrata tema pikkusega ehk mooduliga ja
nurgaga. Sagedusfunktsiooni moodul sõltub sagedusest ja seda sõltuvust nim. amplituudsagedus
karakteristikuks
[ |w|=F()].Sagedusfunktsiooni argument sõltub sagedusest ka seda nim. faasikarakteristikuks
=f() FSK.
Sageduskarakteristiku
konstrueerimine Neid saab
konstrueerida sagedus funktsiooni järgi. Sagedusfunktsiooni võib leida ülekande
funktsiooni järgi. 1 + j 3 1 + j 3 1 + j 3
W = = = 2 j + 3 j + 1 - 2 + j3 + 1 (1 - 2 ) + j 3 ( jw) 2 2 2 2
ahela diferentsiaal võrrand: d UV RC = + Uv = U S dt üldkuju: d X W ( p) = K T dt V + X v =K X S 1 + pT K + j0
W ( j) = 1 + jT sagedusfunktsioon
Leiame mooduli: 2 2 K + j0 = K
1 + (T ) 1 + (T ) 2 2 2
|W|=
Leiame : lugeja jaoks tan1=0/K=0; 1=0
nimetaja jaoks tan2=T/1; 2=
arctan T =1-2= -arctan T - FSK K - arctan T W ( j) = *e 1 + (T ) 2
Sagedusfunktsiooni üldkuju: |W|
K (1 - jT ) K - jKT K K T
W = = = (1 + jT )(1 - jT ) 1 + (T ) 1+ (T ) -j 1+ (T ) ( j) 2 2 2
P Q
Logaritmilised sageduskarakteristikud.
Nendel on teljed logaritmilises mastaabis. See võimaldab karakteristikuid kokku suruda ja
nende konstrueerimine tunduvalt lihtsustub. Sagedusteljel sageduse ühikuks on dekaad. See on
sagedusriba , mille
ulatuses sagedus muutub
10 kordselt.
Amplituuditeljel ühikuks on
detsibell . Detsibell on 1/10 bellist, bell on kümnend lg väljund ja
sisend võimsuste
suhtest . P P
K = V ; lg* K = lg V = lg 10 = 1bell P P S P P S
Logaritmiliste karakteristikute konstrueerimine.
Kirjutame sagedusfunktsiooni: K K K
W = ; p jw w = ; W = 1 + PT 1 + jwT ( wT ) (P) ( jw) 2 1+
LASK -i leidmine: 20 lg W = 20 lg K - 20 lg 1 + ( wT ) 2
( wT ) [1+( wT ) ] ( wT ) 1
- 20 lg 1 + 2 = -20 lg 2 2 = -10 lg 1 + 2
1. ( wT ) 1 - madalsaged uste juures, sel juhul 2 - 10lg [1 + 0] = -10lg1 = 0 2 2. wm = 1 murdesaged us, sel juhul 1 - 10 lg 1 + *T = -10lg (1 + 1) = -10lg2 = 3db T T 3. ( wT ) 1 suurte sageduste juures 2 [ - 10lg 1+ wT -10lg 2 ] ( wT ) = -20lgwT - see on - 20 dec 2 db
Ehitame LASK-i : g db
20 dec
db - 20 dec 1 db wm = - 40 T dec
Tüüplülid
Iga automaatika süsteem koosneb erinevatest elementidest. Nad omavad erinevaid
konstruktsioone, tööpõhimõtteid, võivad olla mehaanilised, elektrilised, pneumaatilised,
hüdraulilised ja
kombineeritud elemendid. 20 lg W
1 wm = T
Automaatika süsteemide arvutamiseks kasutatakse
üldmetoodikat sõltumata sellest, mis elemendid kuuluvad süsteemi. Selleks on vaja need
elemendid kuidagi klassifitseerida. Leida selliseid karakteristikuid ja parameetreid, mis on
üldised kõikide elementide jaoks sõltumata nende liigist. Klassifitseerimise aluseks on võetud elementide dünaamilised omadused, mis iseloomustaks
siirde karakteristikuga ja selle järgi automaatika elemendid on jaotatud 6 tüübiks, ja kõik
elemendid, mis omavad samu dünaamilisi omadusi kuuluvad ühte gruppi, mida nim. tüüplüliks:
1.proportsionaalne lüli 2.inertne lüli 3.võnkelüli 4.diferentseeriv lüli 5.integreeriv lüli 6.viitelüli .
Proportsionaalne lüli.
Siia kuuluvad sellised elemendid, milledel väljund signaal igas ajahetkel on võrdeline
sisendsignaaliga s.t väljundsignaal
kordab sisendsignaali muutusi, ainult tema amplituudi suurus
on suurem või väiksem ja see sõltub ülekande tegurist K.
X V
XS
X V
K X S X V =K X S
W
20lg W Inertne lüli.
K
W = - ASK 2 1 + ( wT ) = - arctan wT - FSK Siia kuuluvad need elemendid, milledel väljundsignaal jääb maha
sisendsignaali muutusest. Nende elementide kooseisus on alati
mahtuvus , mille täitmiseks ainega
võtab aega ja sellest tekib
inertsus . Mida suurem mahtuvus seda suurem inertsus. d X + XV = K
T dt V X S
K
W (p) = 1 + pT ülekande funkts.
K
W (jw) = 1 + jwT - sagedus funkts.
db - 20
20lg W dec
Võnkelüli
Siia kuuluvad sellised elemendid, milledel väljundis võivad tekkida võnked. Nendes
elementides on 2 mahtuvust, nende vahel toimub aine või energia vahetus, mille tõttu võivad
tekkida võnked.
X V
XS
X V
K X S -võnketa siirde protsess K
W ( p) = 2 T p 2 + 2 T p + 1 K
W ( jw) = (1 - w T ) + jw2 T - sagedusfunktsioon 2 2
K
W = - ASK (1-w ) ( 2 Tw) 2 2 T + 2 2
2 wT = - arctan 2 2 - FSK 1- w T
W ( jw) = ) - jw2 T ) (( K 1- w 2 T 2
((1 - w T ) + jw2 T )((1 - w T ) - jw2 T ) = 2 2 2 2
K (1 - w T ) 2 2 K 2 wT -j
(1-w2T 2) + ( 2 T) (1-w2T 2) + ( 2 T) 2 2 2 2
W
20lg W Diferentseeriv lüli.
Siia kuuluvad sellised elemendid milledel väljundsignaal on võrdeline sisendsignaali tuletisega. d X
X =Tv d dt S
Td dif. lüli ajakonstant
t
t
W ( p) = pT d W = wTd - ASK aTd
W ( jw) = jwTd = arctan = +90 o - FSK 0 d X + d X
T d dt v X =T v d dt S
Reaalne lüli
t
Integreeriv lüli.
Siia kuuluvad elemendid, millel väljundsignaali muutumise kiirus (väljundsignaali tuletis) on
võrdeline sisendsignaali suurusega. d X
T i dt v =X S
1
dX = X v T i S
1 T X X dt v = S i
X =X - hüppe sirge , siis S S
X X = S
T v i
1 W ( p) = pT i 1 W ( jw) = jwT i 1 W = - ASK wT
= 0 - arctan T i - FSK w 0
Viitelüli.
Siia kuuluvad sellised elemendid millel väljund signaal kordab viitega sisendsignaali muutusi:
X v (t ) = X S (t - ) - viiteaeg =e - p W ( p) X v( p) - p =e
X X p (v ) S ( p) X S ( p) - jw
W ( jw) =e
Reguleerimisobjektid.
Objekt on seade, kus reguleeritakse mingi parameeter. Neid seadmeid on väga palju. Vaatamata
nende erinevustele neil võib leida ühiseid parameetreid ja karakteristikuid. Ja dünaamiliste
parameetrite järgi objekti võib ette kujutada mingi tüüplülina.
Omadused:
1) Objekti mahtuvus iseloomustab objekti võimet koguda ainet või energiat. Mahtuvuse
suurusest sõltub objekti inertsus. Mida suurem mahtuvus seda suurem inertsus. Mahtuvusest c L=
sõltub ka regulaatori parameetrite muutumise kiirus. R
2) Isereguleerumine
Objekt omab sellise omaduse kui peale tema tasakaalu oleku rikkumist ta ise ilma regulaatoritta
saavutab uue tasakaalu oleku. Siirde karakteristiku järgi on näha, et selline objekt on sarnane inertse lüliga ja automaatika struktuurskeemis sellist objekti saab
asendada inertse lüliga. K0 K 0 - ülekandete gur W( p ) = 1 + pT0 T0 - objekti ajakonstan t Isereguleerimiseta objekt.
See ei taasta oma tasakaaluolekut peale selle riknemist. Siit on näha, et selline objekt on integreeriv lüli. Seda saab skeemi asendada integreeriva lüliga.
3) Objekti ajakonstant Määrab objekti inertsuse. Isereguleerimisega objektide jaoks määratakse aega mille vältel reguleeritav parameeter saaks püsiväärtuse kui ta muutuks lineaarseks. Isereguleerimiseta objektidel ajakonstant To määratakse
ajaga mille vältel reguleeritav parameeter saavutab väärtuse.
4) Viiteaeg - see on aeg mille vältel objektil reguleeritava parameetri muutumine puudub. See võib olla tingitud sellest, et aine või energia ülekandmiseks või transportimiseks on vaja mingit aega ja sellest tekib transport viiteaeg (T t). Samuti võib see
viide olla kutsutud esile = t + c . selle objekti inertsusega mis sõltub mahtuvusest. (Tc). Ning täielik viiteaeg
5) Objekti ülekandetegur K0 võib määrata ka siirde karakteristiku järgi
Lihtsad ja keerulised objektid.
Lihtsad on sellised objektid, milledel reguleeritav parameeter hakkab muutuma maksimaalse
kiirusega kohe peale reguleeritava toime muutumist. Need objektid koosnevad ühest mahtuvusest
ja sellepärast neid nimetatakse ühemahtuvusega objektideks ehk esimese järgu objektideks, sest
nende dünaamilisi omadusi kirjeldatakse esimese järgu diferentsiaalvõrrandiga. Keerulised objektid on sellised objektid milledel reguleeritav parameeter hakkab muutuma
viitega peale reguleeritava toime muutumist. Nad koosnevad kahest või enamast mahtuvusest ja
neid nimetatakse mitme mahtuvusega objektideks või mitme järgulisteks objektideks. Mida rohkem on mahtuvusi objektis, seda suurem on objekti viiteaeg.
Automaatreguleerimissüsteemi stabiilsus.
Süsteemi stabiilsus on väga tähtis omadus, sest süsteem on ainult siis töövõimeline kui ta on
stabiilne. Süsteem on stabiilne kui peale tasakaalu oleku riknemist ta püüab taastada tasakaalu
olekut. Süsteemi stabiilsus sõltub tema skeemi ehitusest ja elementide parameetritest, mis
moodustavad süsteemi. Enne süsteemi realiseerimist on vaja kindlaks määrata kas ta on stabiilne
või mitte. Sellise analüüsi saab teha süsteemi matemaatilise mudeli järgi. Automaatika süsteemi
stabiilsuse saab määrata kas diferentsiaal võrrandi järgi või stabiilsuse kriteeriumide abil, mis
baseeruvad diferentsiaal võrrandil aga lihtsustavad stabiilsuse määramist.
Stabiilsuse määramine diferentsiaalvõrrandite abil. Kuna ülekande funktsioon on võrdväärne diferentsiaal võrrandiga siis stabiilsuse määramiseks
on vaja leida suletud süsteemi ülekande funktsioon, selle seadme stabiilsuse uurimiseks. Automaatika
teoorias on teada seda, et kui süsteem on stabiilne vabaliikumisel siis on ta stabiilne
ka sundliikumisel. Stabiilsuse uurimiseks peab teadma süsteemi diferentsiaalvõrrandit. Selle saab
leida süsteemi ülekande funktsiooni järgi. Kuna stabiilsuse uurimiseks on vaja homogeenset
diferentsiaalvõrrandit. Selle saab kui võrdsustame ülekandefunktsiooni
nimetajad .
bm p m + bm-1 p m-1 + bm-2 p m-2 + ... + b1 p1 + b0
W( p ) = an p n + an-1 p n-1 + an-2 p n-2 + ... + a1 p1 + a0 d nXv d n-1 X v d n-2 X v d1X v dmXs d m-1 X s d m-2 X s
an + a n -1 + a n-2 + ... + a1 + a 0 = bm + b m -1 + bm- 2 + dt n dt n-1 dt n-2 dt 1 dt m dt m-1 dt m-2 d1X s + ... + b1 + b0 dt 1 d nXv d n-1 X v d n-2 X v d1X v homogeenne an n + a n -1 n -1 + a n-2 n-2 + ... + a1 1 + a0 = 0 dt dt dt dt dif. võrrand Stabiilsuse uurimiseks tuleb lahendada diferentsiaal võrrandid ja selle järgi määrata kuidas
muutub XV aja vältel. Selleks, et süsteem oleks stabiilne on vaja, et X V püüdleb nulliks kui t
püüdleb lõpmatusse. Diferentsiaal võrrand lahendatakse järgmisel viisil. d
1) Diferentsiaal võrrandis
kirjutatakse karaktervõrrand dt asendatakse mingi muutujaga. Näide a p n + an-1 p n-1 + ... + a1 p + a0 = 0 . Näeme, et ta on võrdne ülekande funktsiooni p. n nimetajaga ja sellepärast võime kohe võtta ülekande funktsiooni nimetaja nulliks.
2) Lahendatakse saadud
operaator (
karakter ) võrrand kui tavaline algebraline võrrand. Lahendamisel saame n lahendit. pn; pn-1; ...;p1 operaator võrrandi
lahendid .
3) Kirjutatakse diferentsiaal võrrandi lahendus järgmisel viisil. X V = c n e pnt + c n -1e pn -1t + ... + c1e p1t e=2,718 naturaaltegurialus. pn...p1 operaator võrrandi lahendid. t aeg. Kuidas hakkab muutuma XV aja vältel, sõltub karaktervõrrandite lahenditest ja siin võivad olla järgmised:
a) Kõik lahendid on
reaalsed ja negatiivsed, sel juhul süsteem on stabiilne. Kui
lahendite seas on olemas üks positiivne lahend, siis
summaarne liige selle lahendiga püüdleb kui t püüdleb ja kogusumma püüdleb ja süsteem on ebastabiilne. pi = i + j i sel juhul
b) Kui lahendid on kompleksarvud ci e pt = ci e (i + ji ) t = ci eit * e jit = ci et (cos t + j sin t ) Siit näeme, et kompleks lahendite puhul tekib võnkeprotsess, millest räägib
siinuste ja koosinuste olemas olek. Kas võnked sumbuvad oleneb lahendi
reaalosa märgist. Sumbumiseks oleks vaja, et oleks negatiivne.
Järeldus: stabiilsuse määramiseks diferentsiaalvõrrandi järgi tuleb lahendada karaktervõrrandid ja
selle lahendi järgi võib teha järelduse. Selleks, et süsteem oleks stabiilne peavad kõik reaalosa
lahendid olema negatiivsed ja kõikidel kompleks lahenditel reaalosad negatiivsed.
Stabiilsuse kriteeriumid. Nendega saab kergendada stabiilsuse määramist. Nad kõik baseeruvad diferentsiaal võrrandil ja
neid on mitu.
1) Routh. See on algebraline
kriteerium ja stabiilsuse määramiseks kasutatakse diferentsiaal
võrrandis olevaid koefitsiente. a4 p 4 + a3 p 3 + a2 p 2 + a1 p1 + a0 = 0
paaris a4 a2 a0 0
paarit a3 a1 0 0
u a3 a2 - a4 a1 a3 a0 - a 4 0 a3 0 - a 4 0 0 a31 = a32 = a33 = =0 a3 a3 a3 a a - a3 a32 a 0 - a3 a33 0 0 a41 = 31 1 a42 = 31 =0 a31 a31 a a - a31a42 a a - a31 0 0 0 a51 = 41 32 a52 = 41 33 =0 a41 a41 a a - a41a52 0 0 0 a61 = 51 42 =0 a51 Süsteem on stabiilne kui esimese veeru koefitsiendid on kõik positiivsed ja ei võrdu nulliga.
2) Nygwist'i kriteerium sel juhul stabiilsuse määramiseks kasutatakse lahtise süsteemi sageduskarakteristikuid. Igas süsteemis on olemas tagasiside ja ta peab olema negatiivne, siis süsteem on stabiilne.
Tagasiside seade pöörab XV faasi 180º võrra negatiivse tagasiside teostamiseks. Kui süsteemi osa
mis arvutatakse
tagasisidega on ideaalne. Kui tagasiside on ideaalne, siis ta ei kutsu esile
faasinihkeid. Seega ideaalne:
XS =0º
XV =0º
XTS =180º Reaalse süsteemi elemendid viivad sisse faasinihkeid ja tavaliselt need on negatiivsed ja
suurenevad sageduse suurenemisel. Võib tekkida olukord, et mingisugusel sagedusel süsteemi
väljundis tekib
nihe 180º. Reaalne:
XS =0º
XV =-180º
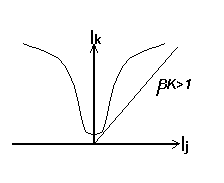
XTS =180º Süsteemi sulgemisel XS ja Xts vahel faasi nihe on 0º ja süsteemis tekib "+ts". Ja süsteem võib
minna tasakaalust välja. Aga selleks on vaja lisatingimust, et sellel sagedusel süsteemi
üldülekande tegur oleks suurem kui 1.
Ebastabiilsuse tingimusteks on seega =V-S=-180º ja |W|=>1.
Kui üks nendest tingimustest ei ole täidetud on süsteem stabiilne. Lähtudes nendest tingimustest
saab süsteemi stabiilsuse määrata lahtise süsteemi sageduskarakteristiku järgi. Kui tahame AFSK järgi stabiilsust. Logaritmilise karakteristiku järgi.
Süsteem on stabiilne kui lahtisi süsteemi AFSK ei haara punkti koordinaatidega (-1;0). Mihhailovi
stabiilsus. Mihhailovi stabiilsuse määramiseks tuleb kasutada suletud süsteemi ülekande funktsiooni b p m + ... + b1 p + b0 W( p ) = m n an p + ... + a1 p + a0 võtame nimetaja an p n + an-1 p n-1 + ... + a1 p + a0 = 0 selle võrrandi lahendid on pn; pn-1; ...; p; selle võrrandi võib kujutada ka nii ( p - pn )( p - pn -1 )...( p - p1 ) = 0 asendades siin p=j saame ( j - p n )( j - p n-1 )...( j - p1 ) = 0 p ...p operaatorvõrrandi lahendid. n 1
pi = i + j i Süsteemi stabiilsuseks on vaja, et kõik -d oleksid negatiivsed. Kuna pi = i + j i on vektor siis on ka ( j - pi ) on ka vektor. Vaatame kuidas käitub vektor ( j - pi ) ja ( j - pi + 1) ( j - pi + 1) pöörab + võrra. ( j - pi ) pöörab - võrra ja vektor Muudame = - kuni + ja selle tagajärjel vektor ( j - pi ) pöörab 0,5 ja ( j - pi + 1) pöörab +0,5 võrra.
Kui muudame = 0 kuni + siis
Kuna selliste vektorite arv on võrdne n iga ja süsteemi stabiilsuseks on vaja, et igal vektoril
oleks , siis süsteem on stabiilne kui üldine pöördenurk on võrdne +n*0,5.
( j - pn )( j - pn-1 )...( j - p1 )
W n e jn * W e jn -1 * ... * W 1 e j1 = W n * W * ... * W 1 * e j ( n +n -1 +...+1 ) = M * e j n -1 n-1 M
Mihhailovi vektorimoodul; Mihhailovi vektoripöördenurk. Mihhailovi kriteeriumi järgi süsteem on stabiilne, kui Mihhailovi vektor liigub vastupäeva ja
läbib n kvadranti, kus n on diferentsiaal võrrandi järk ja stabiilsuse uurimiseks on vaja võtta
suletud süsteemi ülekande funktsioon ja selle funktsiooni nimetaja järgi määrata Mihhailovi
vektor.
Automaatreguleerimissüsteemide kvaliteet. ARS kvaliteet mõõdetakse vigade suurusega, mis tekivad reg. protsessi käigus. Kvaliteeti võib iseloomustada eraldi olevate näitajate abil või
integraal kriteeriumite abil, mis võimaldavad võrrelda omavahel süsteeme kvaliteedi järgi, võib olla kahte tüüpi. - max = 100 max -max kõrvalekalle; -staatiline viga; st - ülereguleerimine; t r -
= (1 - )100 3
aeg mille vältel protsess praktiliselt lõppeb; sumbuvus 1
Integraal kriteeriumid
Kvaliteedi määramiseks suurema osatähtsuse omavad ja t r . Neid mõlemaid näitajaid saab
arvestada korraga kui võtame integraali reg. protsessist. See integraal annab pindala, mis on selle
kõvera all. tr1 t r1
S =I = )t )dt S = I = (t )dt Kui S = S , siis võib arvata, et süsteemid on võrdsed kvaliteedi järgi. 1 1 1 2 2 2 0 0 1 2
ARS süsteemide
korrektsioon .
Kui süsteemi kvaliteet ei vasta nõuetele, siis selle parandamiseks viiakse sisse korrektsioon s.t.
pannakse lisaelemendid või skeemi muudatusi, selleks et suurendada süsteemi täpsust. Tavaliselt
kui süsteemil stab. varud amplituudi ja baasi järgi on väikesed, siis süsteemi kvaliteet on
halvem ,
sellepärast et suureneb max. kõrvalekalle regul. protsessi käigus ja pikeneb regul. aeg. ARS saab
korrigeerida järgmiselt:
1. jada korrektsioon, sel juhul reguleerimiskontuuri sisse pannakse jadamisi dif. lüli. Sellel lülil on positiivsed faasinihked ja sellega kompenseeritakse süsteemi neg. faasi nihkeid ja üldine faasinihe väheneb ja süsteemi stabiilsus paraneb ja sellega paraneb ka täpsus, kvaliteet.
2. Rööpkorrektsioon, sel juhul korrigeerivad lülid lülitatakse rööbiti korrigeerivate lülidega. Võib olla otseühendus ja vastuühendus.
Vt. joonist : siit on näha, et inertne lüli sellise ühendusega on muudetud dif. lüliks ja dif. lülil on
posit. faasi nihke nurgad mis kompenseerivad neg. faasinihke nurgad. Kui süsteemis on 2 integreerivat lüli, siis nad kohe annavad -180 faasinurga ja süsteem on
kindlalt ebastabiilne ja neid on vaja tingimata haarata tagasisidega, et süsteem saaks stabiilseks.
Sellist tagasisidet, kus tagasiside elemendiks on element K nim. jäigaks tagasisideks. Selline
tagasiside tegutseb nii staatilises kui dünaamilises reziimis. Kui tagasiside ahelas kasutatakse dif.
lüli, siis sel juhul see tagasiside ei tegutse staatilises reziimis vaid tegutseb ainult dünaamilises
reziimis ja sellist tagas. nim. elastseks tagas. selline tagas. hakkab toimuma ainult siirdeprotsessi
jooksul ja sel ajal ta stabiliseerib süsteemi tööd. Kui tagas. ahelasse panna inertne lüli, siis sellist
lüli nim. inertseks lüliks
AR dünaamilised omadused.
Automaatikas kasutatakse erinevaid regul., mis erinevad konstruktsiooni-, töö põhimõtte-,
kasutatava energia poolest. Kuid sõltumata sellest neid saab
grupeerida sõltuvalt nende
dünaamilistest omadustest. Dünaamilisi omadusi iseloomustatakse regulaatori
reguleerimisseadusega, mis näitab kuidas muutub regulaatori väljundsignaal (reguleeriv toime µ ) sõltuvalt sisendsignaali( reguleeritav parameeter ) muutumise korral. Ja seda isel. Regul.
siirde karakteristikuga. Vastavalt sellele võib regulaatorid jaotada järgmisteks liikideks: I-
integraalne ;
P proportsionaalne; PI
prop . integraalne; PD prop. difer.; PID prop.
integ . Dif. regulaator.
I regulaator.
Siia gruppi kuuluvad regul. milledel µ muutumise kiirus on võrdeline muutumise d
suurusega. T dt T i - regulaatori ajakonstant. i =
dt + µ = dt = t 1
µ= T i 0 T i T i
I regulaatori karakteristik( vaata jooniseid).
I regulaatori karakteristik näitab kuidas on I reg. staatilises reziimis omavahel seotud regul.
parameeter ja regul. reguleeriv toime µ . Karakteristikust on näha, et regul. hoiab täpselt ettenähtud tasemel 0 , seejuures regul. organ võib olla
erinevas asendis min ja max vahel. See, µ µ
et sellel regul. staatiline viga puudub on I regul. eelis, kuid tal on halvad dünaamilised omadused:
tal on pikk reguleerimisaeg ja suured kõrvalekalded.
P regulaator proportsionaalne regul.
Sellel regul. reguleeriv toime kordab reguleeritava parameetri muutusi.
µ=K +µ r 0
Selle regul. on kindel seos reguleeritava parameetri ja reguleeritava toime µ vahel ja
sellepärast sellel regul. on staatiline viga. Regul. ei taasta parameetrit algasendisse,
vaid peale reguleerimisprotsessi lõppemist regul. parameetri väärtus erineb esialgsest väärtusest
staatilise vea võrra. Staatilise vea olek on regul. puudud, aga ta omab häid dünaamilisi omadusi. 1
D= 100 K -proportsionaalsuse diapasoon, see näitab missugune sisendsignaali muutumise r
piirkonnas väljundsignaal on proportsionaalne ehk võrdeline sisendsignaaliga. P regul. võib saada I regul. jäiga neg. tagasiside sisseviimisega ja see tagasiside stabiliseerib
regul tööd ja selle tõttu dünaamilised omadused paranevad.
PI regulaator.
Tal on 2. esimese regulaatori kombinatsioon ja ta omab nende eeliseid s.t. tal puudub staatiline
viga ja ta omab häid dünaamilisi omadusi. Sellel regulaatoril reg. organi ümberpaigutus on
võrdeline reguleeritava parameetri kõrvalekaldega ja selle kõrvalekalde
integraaliga . 1 dt + µ t
µ = K p + - reguleerimisseadis. 0 i
PI regulaatorist on võimalik saada p-reg., kui jäiga tagasiside ahelasse lülitame sisse dif. lülid. Sel
juhul jäik tagasiside muutub elastseks tagasisideks, mis toimub ainult siirdeprotsessi ajal ja selle
aja jooksul töötab regul. nagu p-reg., sellepärast omab häid dünaamilisi omadusi. Püsi reziimis
elastse tagas. mõju kaob ära ja seal töötab kui I-regul. Puudub staatiline viga.
PD ja PID regulaator
Need on PI reg, kuhu on sisse viidud signaal kõrvalekalde tuletise järgi. Selle signaali
sisseviimine kiirendab regulaatori tööd ja suurendab tema täpsust. Kõrvale kalde tekkimisel parameetri muutus on maksimaalne. Selle signaali kiiruse järgi saaks
dif. lüli abil ja kui selline signaal saata regulaatorisse, siis see hakkab kohe tööle ilma parameetri
märgatavat muutumist.
Ja selletõttu parameeter tagastatakse kiiremini algasendisse ja parameetri kõrvalekalle
reguleerimise käigus väheneb. Tänu sellisele dif.lülile regulaator nagu ennetab parameetri
muutust ja seepärast kutsutakse neid ennetusega regulaatoriteks.
Regulaatorite konstruktiivelemendid.
Automaatregulaator koosneb erinevatest elementidest mis täidavad vajalikke funktsioone.
MS mõõteseade.
JS juhtseade.
TM täiturmehhanism.
RO reguleerimisorgan.
O objekt. Regulaator koosneb: andurist, juhtseadest, täiturmehhanismist ja reguleerimisseadisest.
Andurite hulka kuuluvad kõik seaded mis muundad reguleeritava parameetri väärtust signaalist
mille peale reageerib juhtseade, need
signaalid võivad olla: elektrilised, mehaanilised,
pneumaatilised ja hüdraulilised signaalid. Tihti koos anduriga kasutatakse ka mõõteskeemi või
muundurit mis muundavad anduri signaali vajalikuks signaaliks. Andurid jagunevad vastavalt
mõõdetavale parameetrile
(temperatuuriandr,termotakistid,biimetallandur,elavhõbe,manomeetriline
andur ). Mõõteskeemidena kasutatakse: sildskeeme, dif transf, pneumomuundureid ja unifitseeritud
muundurid mis muundavad parameetreid (rõhuks, vooluks) nende skeemid on juba keerulised.
Juhtseadmed.
Nad võtavad vastu signaali anduri poolt, võrdlevad seda etteantud suurusega ja kui tekib
signaalide erinevus siis võimendavad seda ja formeerivad juhtsignaali mis läheb
täiturmehhanismile. Juhtseadmete hulka kuuluvad igasugused võimendid
(releevõimendid,elektrimasinvõimendid,magnetvõimendid,elektronvõimendid,pneomo-
,hüdraulilised võimendid j.n.e.).
releeseadmed (võimendid)
Võimendustegur - Kp=PK/Pmax Prak=
Irak * Urak
Tagastustegur - Kt=Itag/I=(0...1) PK=IK * E
Käivitusvool - Ikäiv=E/RK
tt tagastusaeg.
tr rakendusaeg aeg juhtvoolu andmiseks.
tr releed (väike
inerts ).
tr = 0,05s ... 0,15s normaalsed tavalised releed.
tr = 0,15s ... 1s
inertsed releed.
tr > 1s ajareleed.
Elektrimasinvõimendi.
Kasutatakse allaisvoolu signaalide ja väikese sagedusega signaalide võimendamiseks. Sellist
võimendit saab kasutada võimsates elektriajamites. Kõige lihtsam:
Võib kasutada tavalist generaatorit masinvõimendina, mida juhitakse ergutusmähise poolt. Kui
muuta juhtvoolu Ij siis muutub magnetvälja tugevus Øj ja sellest kohe muutub koormusvool UK
ja IK . Sellist kasutatakse harva Kp=80...100. Praktikas kasutatakse kaheastmelisi
masinvõimendeid.
Siin on kaks astet, esimese astme sisend on juhtmähis ja väljundharjad 1 ; 1` . Teise astme
sisendis on
harjad 1 ; 1` ja väljundis 2 ; 2 ` . Kui juhtmähisele anda juhtvoolu siis tekib
magnetjuhtvool Øj ja sellest harjades 1 ; 1` indutseeritakse väike pinge kuna Øj on väike. Kuna
harjad 1 ; 1`on lühistatud siis ankrumähist hakkab läbima suur vool ja see kutsub esile suure põiki
magnetvoo ØP . E1=1V RN= 0,1 I1=1/0,1=10
Juhtmähisesse antakse
sisendpinge , sellest tekkiv magnetvoog Øj ja sellest harjadel 1 ; 1`
indutseeritakse E1 . Sellest E1 st ankrukeerdudest mis on ühendatud harja 1 ; 1` tekib suur vool
I1 millest tekib suur põhimagnetvoog ØP . Mis seisab ruumalas liikumatult, pidevalt. ØP lõikab
keerdu mis on esimese keeruga risti ja see
keerd on ühendatud
harjadega 2 ; 2 ` . Selles
keerus indutseeritakse suur pinge ja sellest pingest tekib koormusvool IK , see on võimendi väljundvool.
IK läbib ankrukeerdu ja kutsuub esile ankrumagnetvoo ØA mis on vastu Øj . Sellega Øj ei tööta
siis on 100 % tagasiside. Selle vältimiseks staatorile on keritud kompensatsioonmähis (W kom).
Jadamisi ühendatud ankrukeeruga, IK läbides Wkom kutsub esile Økom mis on ØA
vastassuunas ja kompenseerib selle (ØA). Täpseks kompenseerimiseks on lülitatud rööbiti Rkom ja selle liuguriga
saab teostada täpset kompenseerimist. Selle võimendi võimendustegur võib olla mitu tuhat ja kui
koormustakisti Rk panna kalalisvoolumootorid siis selle võimendiga saab kergelt juhtida.
Magnetvõimendid.
Kasutatakse alalisvoolu ja väikese sagedusega vahelduvvoolu võimendamisel, samuti
kasutatakse neid ka alalisvoolu signaalide muundamiseks vahelduvvoolu signaalideks.
Wj juhtmähis.
W vahelduvvooluumähis (töömähis).
P1
koormustakistus .
IK= ~Ut/~Z Kõige lihtsam magnetvõimendi kujutab endast tavalist transformaatorit, kus primaarmähises
antakse alalisvoolu mootor. Alalisvoolu signaalidega toimub südamiku eelmagneetimine, sellest
muutub südamiku magnetiline läbitavus , sellest muutub sekundaarmähise induktiivsus ja
muutub seda läbiva voolu suurus (Ik). Kui Ij; ; L; Ik. =H; 1=1/ 2=B2/H.
12; sest 12; H=I*. Neist valemitest ja graafikutelt on näha, et juhtvoolu muutmisel muutub
südamiku magnet läbitavus . Ja kui primaarmähise
keerdude arv on palju suurem, kui
sekundaarmähise keerdude arv, siis võimendustegur võib olla mitukümmend. Puudused:
Primaarmähises indutseeritakse vahelduvpinge sekundaarmähisest ja kuna primaarmähise
keerdude arv on suur, siis indutseeritud pinge on ka suur, see suur pinge mõjub sisend signaali
allikale ja võib selle rikkuda. Selle vältimiseks panna mähise ette
drossel , mis ei lase
vahelduvpinget signaali allikale, kuid
laseb alalisvoolu signaali allikast juhtmähisele.
Tühijooksu voolu olemasolu.
Mitte faasitundlik. Ei reageeri Ij suuna muutusele.
Väike
tundlikus väiksele sisendpingele.
Neid puuduseid likvideeritakse magnetvõimendite
keeruliste skeemide abil. Kahe südamikuga magnetvõimendi.
n nihke
Wn nihkemähis, selle abil magnetvõimendil määrataks töökarakteristik.
Nihke voolu suurus valitakse nii, et algne tööpunkt oleks sirge osa
keskpunktis . Sellega
võimendi muutub faasitundlikuks, sest kui juhtvoolu suund on positiivne siis I K suureneb ja kui IJ
on negatiivne siis IK väheneb. Kolmas punkt on likvideeritud, aga tühijooksuvool veel suurenes, neljas punkt on ka
likvideeritud sellega, et juhtmähis on keritud kahest osast mis on omavahel lülitatud vastassuunas
ja kompenseerivad teineteist. Kõik puudused likvideeritakse veel keerulisema skeemiga. Nelja südamikuga magnetvõimendi. Võimendi koosneb kahest kahe südamikuga võimendist. Juhtmähised on lülitatud vastassuunas
ja sellega nendes indutseeritud pinged
kompenseeruvad . Vahelduvvoolu mähite voolud läbivad ka RK vastassuunas ja kui IJ on võrdne nulliga siis I1=I2 ja
IK=0 sellega tühijooksu vool likvideeritakse.
Siit on näha, et kõik puudused on likvideeritud.
Tagasiside magnetvõimendites.
Võib olla positiivne tagasiside, sel juhul võimendustegur suureneb aga kvaliteedinäitajad
halvenevad. Negatiivse tagasiside väheneb, kvaliteedinäitajad paranevad (võimsam,
kiiretoimelisem, sagedusriba
laieneb ,
lineaarsed ). Tagasiside teostamiseks on vaja osa väljundsignaalist anda tagasi sisendisse. Seda võib teha nii,
et osa koormuse voolust saata juhtmähisesse, aga sel juhul sisend ja väljund ahelad on omavahel
elektriliselt ühendatud. Sellepärast ts-e koostamisel kasutatakse ts mähist, kuhu antakse osa
koormuse voolust. Ja kui selle mähisega südamikud magneeditakse samas suunas, kui juhtmähis,
siis tekib pos.ts, kui vastassuunas, siis neg.ts. Kuna magnetvõimendit juhitakse alalisvooluga aga
Ik on
vahelduvvool , siis tuleb Ik enne ts ahela kasutamist alaldada. (joonis) - ts tugevustegur, R -
sellega reguleeritakse -t. Kts=K/1K. Kts=Ik/Ij. Kui K1, siis Kts=K/1-K , kui K=0 ja Kts
läheb negatiivsemaks, sellega võimendi kaotab oma stabiilsuse ja läheb relee reziimi ja töötab
kontaktivaba releena. Dioodi
sild väljundvoolu IK alaldamiseks. Puudus: võib kommuteerida ainult ühte
ahelat . Pneumaatilised võimendid.
1 membraanisõlm
2 kuulklapp Toiterõhk antakse
kambrisse A. Sisendrõhk antakse kambrisse D.
Sisendrõhk mõjub ülemisele membraanile. Kui PS suureneb siis üks membraanisõlm (1) läheb
alla, kuulklapp
avaneb rohkem ja väljund PV suureneb. Kui PS väheneb siis (1 B) rõhu mõjul,
hiljem atmosfääri PV väheneb.
Hüdraulilised võimendid.
Sellel
skeemil on kaks astet:
jaoturvõimendi
kolbjaoturiga võimendi Kui 1 nihutatakse vasakule siis rõhk läheb läbi kanali b juhtsilindri 2 parempoolsesse ossa.
Kolb 2 liigub vasakule ja sellega koos liiguvad
kolvid 2;4;5;6. Avaneb
kanal C ja kolb 7 liigub
paremale. Läbi kanali D õli täitursilindri parempoolsest osast läheb väljalasku. Võimendustegur
võib olla väga suur (näit.: mitu tuhat).
Täiturmehhanismid.
Kasutatakse reguleerimisseadeldise ümberpaigutuseks (mootorid). Neid nim. servomootoriteks.
Dünaamiliste omaduste järgi jaotatakse neid kahte liiki:
Proportsionaalse kiirusega mootorid, neil väljundvõlli
liikumiskiirus on võrdeline sisendsignaali
(juhtsignaali) suurusega.
Siirdekarakteristiku järgi on näha, et kolbi ümberpaigutuse µ järgi selline
mehhanism kujutab
endast integreerivat lüli.
Tema parameeter võiks olla Ti integreerimisajakonstant. Kuid tegelikult sellist mehhanismi
iseloomustatakse servomootori ajaga Ts aeg mille vältel reguleerimisorgan paigutatakse ühest
äärmisest asendist teise maksimaalse sisendsignaali mõjul.
Pideva kiirusega mootorid nendel
mootoritel väljundvarda ümberpaigutuse kiirus jääb
konstantseks kui sisendisse antakse mootor mis ületab mittetundlikuse tsooni (delta).
Elektrilised täiturmehhanismid.
Neid kasutatakse väga laialdaselt, sest
elekter on väga lihtne kätte saada.
Elektritäiturmehhanismi koosseisu kuuluvad: elektrimootor,
reduktor (pöörlemiskiiruse
alandamiseks),väljundvõll millega ühendatakse reguleerimisklapp ja
lisaseadmed .
Lisaseadmed: a) lõpplülitid. Ettenähtud selleks, et katkestada toiteahelad kui väljundvõll saavutab
äärmise asendi. B) käsiajam. Selleks on vaja, et saaks väljundvõlli umber paigutada käsitsi kui mootor on välja lülitatud. See annab võimaluse teha katset ja häälestust käsijuhtimisel. C)
tagasiside seade. See seade annab signaali väljundvõlli asendi järgi ja sellega võib teostada P
reguleerimisseadust. D) väntvõlli asendi näidik. Mille järgi saab kindlaks määrata
reguleerimisklapi asendit. · Pöörete arvu järgi neid võib jagada: a) ühepöördelised,
b) mitmepöördelised.
Kahepositsiooniline el. täiturmehhanism.
1) kontaktrõngas 2) liikumatu kontakt 3) liikuv kontakt 4) L1L2 mootorimähised 5) C mootori kondensaator
Mootor seisab kuni C1 ja L2 ahel on avatud,
klapp suletakse. Avamisel lüliti S avatakse, tekib
vooluahel. L1 saab toidet läbi kontaktide 3 , 2 ja AV L2
toide läbi C. Mootor töötab nihikliugur
kontaktilt kontaktrõngale 3. Kontaktrõnga
toiteahel jääb suletuks. Mootor töötab
niikaua kui 3
saavutab teise liikumatu kontakti 2. Ahel katkeb ja mootor seiskub ja klapp avatakse S1 suletakse,
siis mootor töötab
saal viisil, 2 liikumatut asendit AV või suletud kahe positsioonina.
Kolme positsiooniline täiturmehhanism e. proportsionaalne täiturmehhanism.
Sellist mehhanismi kasutatakse proportsionaalseks reguleerimiseks. Tema väljundvõll võib olla
vaheasendis kahe äärmise vahel. Kui S1 on ülemises asendis siis L1 saab toidet otse võrgust läbi S1
ja SQ1. L2 saab sama toite ainult läbi C. Mootor pöörleb ühes suunas. Kui S1 on alumises asendis
siis L2 saab toite otse võrgust. Kui S1 on keskasendis siis mootor võib seiskuda vahepositsioonil.
SQ1 ja SQ2 lõpplülitid mis
kaitsevad mootorit, nendega mootor lülitatakse välja kui ta on ühes või
teises äärmises asendis. S1asemel võib kasutada regulaatori väljundreleed või regulaatori
juhtimisplokki mis töötab transistoridel, mille abil saab juhtida täiturmehhanismi kontaktivabal
meetodil. Potentsiomeeter mille
liugur on ühendatud mootori võlliga võib kasutada kas jäiga
tagasiside teostamiseks, kui P reguleeris seadust. Saab kasutada täiturmehhanismi väljundvõlli
asendi näitamiseks.
Elektromagnetklapid.
Tihti kasutatakse täiturmehhanismidena ja võivad olla kahes positsioonis avatud või suletud, s.t.
nendega saab teostada kahepositsioonilist reguleerimist. Sellise lihtsa klapi puudus on see, et ta klapi avamisel tarbib pidevalt voolu (ei ole
ökonoomne).Kasuteguri
suurendamiseks kasutatakse riiviga klappe. SQ1 kuni SQ4 lõpplüli
Klapi avamiseks tuleb sulgeda S1,siis mähis 1 saab täidet läbi dioodisilla. Sild on selleks, et
suurendada mähise 1 tõmbejõudu ja vähendada vibratsiooni, sest alaldatud vool omab
alalduskomponenti. Tänu millele
vibratsioon väheneb kuna vool ei saavuta sel juhul null väärtust.
Mähis 1 rakendub läbi SQ1 ja tõmbab klappi ülespoole. Rakendub
riiv ja klapp jääb avatud
asendisse. Selles asendis SQ1 ja SQ3 avatakse, SQ2 ja SQ4 suletakse, sellest hakkab põlema
HL2 mis signaliseerib, et klapp on avatud. SQ2-ga ette valmistatakse rakendamiseks mähis 2.
Selles asendis klapp ei tarbi voolu kuna SQ1 on avatud ja mähis 2 ei tarbi voolu sest S2 on ka avatud. Klapi sulgemiseks vajutatakse S2-e mähist, sulgub SQ2,riiv tõmmatakse välja ja klapp
suletakse. SQ1 ja SQ3 suletakse, hakkab põlema HL1 mis signaliseerib, et klapp on suletud.
Tähisti R, SQ1 sädelemise vähendamiseks. Siit on näha, et klapp tarbib voolu ainult avamise ja
sulgemise momendil.
Pneumaatilised täiturmehhanismid.
Kasutatakse automaatikas, sest omavad lihtsa konstruktsiooni, odavad väikesed gabariidid
arendavad suurt võimsust, jõudu väljundvardal. Neid kasutatakse pneumaatika- ja kombineeritud
automaatika süsteemis. Kasutatakse kahte liiki: 1)
Membraan täiturmehhanism- kasutatakse sel
juhul kui on vaja teostada väikseid ümberpaigutused. 1- membraanklapp; 2- membraan; 3- vedru; 4- väljundvarras; 5-
mutter (vedrule anda eelpinge); 6- kohalik reguleerimise asendi näitaja .
Täiturmehhanismide täpsuse suurendamiseks ja mittetundliku tsooni vähendamiseks kasutatakse
võimsusvõimendit, mis ühendatakse täiturmehhanismiga.
1- sülfoon; 1- ülekandekang; 2-
jaotur .
Juhtrõhk mõjub sülfoonile 1 mis omakorda mõjub kangile 2 mis on seotud jaoturiga. Kui Pj ; AA` ; CC` jaotur sulgeb väljalasku ja rõhk kambris B suureneb. See mõjub
täiturmehhanismi membraanile ja DD`; C` C. Rõhu võimsus on kambris B palju suurem kui PJ
ja sellega teostatakse saadud võimendus. Kangiga C ; D osaga on teostatud negatiivne tagasiside sest selle osa ümberpaigutamine mõjub
jaoturile 3 vastassuunas võrreldes Pj -ga. Kui Pj tõstab CC`,siis D väljundvarda
ümberpaigutamine viib D punkti abil C` C tagasi. Negatiivne tagasiside parandab kvaliteeti,
suurendab täpsust ja parandab karakteristiku lineaarsuust.
Kolbtäiturmehhanismid.
Kasutatakse sel juhul kui on vaja teostada suuri ümberpaigutusi.
Jaotatakse kahte liiki: Otsekäik Fotse=(D2/4)*Pj-Fhõõrde Tagasikäigul Ftagasi=((D2/4) (d2/4))*Pj-Fhõõrde ühesuunalised või monostabiilsed. kahesuunalised Pj=10 Bar
Hüdraulilised täiturmehhanismid. Hüdraulilised täiturmehhanismid tavalise kolbiga
mehhanismid , mõnikord ka
membraanmehhanismid.
Võivad arendada palju suuremat jõudu sest nende toiterõhk võib olla kuni 120 Bar. Ptoite 120 Bar
Reguleerimisorganid.
Reguleerimisorgan (
seadeldis ) on ühendatud täiturmehhanismiga ja kasutatakse ainet või energiat
mis läheb objekti muutmiseks. Reguleerimisorganitena kasutatakse igasuguseid klappe, ventiile,
siibreid ja kraane. Puistematerjalide reguleerimiseks kasutatakse konveierit.
Reguleerimisorganite parameetrid ja karakteristikud.
1-
Tinglik läbilask määratakse aine
kuluga m3/h mis läbib reguleerimisorganit järgmistel tingimustel: Aine tihedus =1000kg/m3 Rõhulang Klapp maksimaalselt avatud KQt tinglik läbilask. 2- Tinglik ava määratakse klapi ühenduskoha läbimõõduga. 3- Tinglik rõhk Pt määratakse maksimaalse rõhuga mida kannatab ventiil normaaltemperatuuri juures. 4- Maksimaalne töörõhk Pmax määratakse maksimaalse rõhuga töötemperatuuri juures. Need rõhud määravad klapi kindluse. 5- Rõhulang klapil - P sellest sõltub klapi varda ümberpaigutuse jõud. Lähtudes sellest valitakse täiturmehhanismi võimsust. 6- Reguleerimisorgani gabariidid ja konstruktsioonid iseloomustatakse konstruktiivse
karakteristikuga mis näitab kuidas sõltub läbilaskeava klapi ristlõikepindala avamise
astmest .
Konstruktiivne karakteristik S=f(m) S ava ristlõikepindala, m=h/
hmax avanemise aste. Võivad olla lineaarsed või
mittelineaarsed. 7- Klapi reguleerimisvõime iseloomustatakse kulu karakteristikuga mis näitab kuidas sõltub aine hulga kulu läbi klapi, avamisastest. Q=f(m) kulu karakteristik m=h/hmax avanemisaste.
Jagatakse kaheks
liigiks :
1) Teoreetiline - näitab kuidas sõltub aine kulu läbi klapi, konstantse rõhulangu korral klapil. Need karakteristikud võivad olla :
Q=Kh lineaarne
Q=Kh2 paraboolikujuline
Q=Q0LKh logaritmiline
K võrdetegur
2) Töö kulu karakteristikud näitab kuidas sõltub aine kulu läbi klapi, töötingimustes, kuna
hulga kulu sõltub aine tihedusest, viskoossusest, rõhust, temperatuurist siis töökarakteristikud on
tunduvalt erinevad
teoreetilistest karakteristikutest ja sellest, et erinevus oleks väiksem on vaja, et
rõhulang reguleerimisklapil oleks palju suurem kui rõhulang süsteemi teistel osadel. Nendes karakteristikuste
eeliseks on lineaarkarakteristik ja kui kasutatakse reguleerimisorgani
mittelineaarset karakteristikut siis püütakse teha nii, et reguleerimisorgani mittelineaarsus
kompenseeriks süsteemi teise osa mittelineaarsuse, nii et saad kogu süsteemi lineaarset
karakteristikut.
Reguleerimisorganite
konstruktsioon .
Sellist konstruktsiooni nim.
koormatud reguleerimisorganiks, mittetasakaalustatud organiks sest
läbiv aine mõjub klapile ja tekib
tasakaalustamata jõud F=S(P1-P2)=S*P
S klapi ristlõike pindala.
P rõhulang reguleerimisorganil.
P1 rõhk enne reguleerimisorganit. P2 rõhk peale reguleerimisorganit. See jõud tähistab klapi ümberpaigutamist ja nõuab täiturmehhanismi võimsuse suurendamisest.
Kasutatakse väiksemate töörõhkude puhul. Suuremate rõhkude puhul kasutatakse tasakaalustatud
klappe ehk mittekoormatud klappe. P1,6Mpa P1,6MPa Selles ventiilis on kaks sadulat ja kaks klappi. Läbiv aine mõjub klappidele vastassuunas ja
jõud, mis tekivad ja mõjuvad klappidele on vastassuunalised ja kompenseeruvad ja sellepärast
klappide ümberpaigutusjõud on palju väiksem kui eelmises. Võib kasutada väikese võimsusega
täiturmehhanisme. Kuna klapid ei ole ühesused, siis täielikku kompensatsiooni ei teki. Tekib
mõni jõud ümberpaigutuseks millele lisandub veel
tihendi hõõrdejõud. Tihendi hõõrdejõud
suureneb aine rõhu suurenedes. Tihendid võivad olla kas plastmassist või viltmaterjalist (võib
õlitada). Sellise
ventiili korpus valmistatakse kas
malmist ,
terasest või legeeritud terasest
(
roostevaba ). Suuremate temp. rõhkude puhul kasutatakse terast või legeeritud terast. Väiksemate
temp. rõhkude puhul malmist.
Sadul ja klapp valmistatakse terasest (mõnikord
samast , mõnikord
teistest
materjalidest ).
Klappide liigid.
Taldrikukujuline, tasapinnalise sadulaga.
SA=D2/4 SK=2(D/2)*h kui h=hmax siis S0=SK
hmax=D/4=0,25D hmax klapi maksimaalne ümberpaigutus.
Sel juhul klapi läbilaske ristlõikepindala on võrdne sadula ava pindalaga S ja klapi mõju
regulaatorile kaob. Selline klapp omab lihtsat konstruktsiooni, teda saab kasutada väikeste
rõhkude ja kulude puhul ja mittesaastatud vedeliku kulu reguleerimiseks. Sadula teravad nurgad
(servad) kuluvad ära ja klapi karakteristikud muutuvad. Selle vältimiseks kasutatakse koonilise
pindalaga klappe.
Kui nurk =90º siis hmax=0,3D
Korkklapid kasutatakse rasketes tingimustes(
saastatud kohtades), vibreerimist ei teki.
hmax=0,5 ... 0,6D Kolbklapid väljalõigud võimaldavad saada klapi vajaliku karakteristiku.
Väljalõigud võimaldavad saada klapi vajalikku karakteristikuut.
Nõelklapp kasutatakse peenreguleerimiseks väikese kuluhulga puhul. Võrreldes
teistega hmax=3,78D kui
gamma =15º .
Siibrid.
Pöörlevad siibrid kasutatakse õhu, gaaside ja
aurude kulude reguleerimiseks.
Töötavad väikeste staatiliste rõhkude puhul kuni 0,1 MPa - liini . Neid kasutatakse ümmargustes
torudes ja ristkantides. S=0,5D2(1-cos ) Kui kasutatakse suuri õhutorusid, sel juhul kasutatakse
mitmelabalisi siibreid. Siibrite tugevuse suurendamiseks siibritele tehakse tugevdusribad
(plekist). Malmist tehtud siibrid (tugevdusriba ei
tehta ) suuremad rõhud ja suurem temperatuur.
Lükandsiiber (riiv) kasutatakse kuni P10KPa rõhkude puhul. Kui
siibri sees teha väljalõikeid,
siis sellega saab muuta tema karakteristikut. Kui need töötavad alla 300 ºC , terasest kui üle, siis
malmist. Kui agressiivsete gaaside, siis kaetakse inertse kattega.
3)
Kraanid neid kasutatakse kahe positsiooni reguleerimiseks. Puudus: suur
hõõrdumisjõud ,väike pöörlemisnurk 90º , järsult kinnitamisel võib tekkida hüdrolöök mis võib
purustada toru või
kraani .
Reguleerimisorganite ühendamine täiturmehhanismidega.
1. Jäikühendus teostatakse metallvarda abil. Pöörlemisnurk on väike (
kuuni 90 º), pöörlemispinnad peavad olema ühel
tasapinnal .
2. Trossühendus ühesuunalised, teises suunas raskuse abil. Trosside pikkus L=20 25 m , võivad olla erinevatel tasanditel. Puudused: ajaga
tross venib ja kooskõlastavus rikneb.
3. Otseühendus täiturmehhanism asub kohe klapi peal (pneumaatilised, elektrilised).
4. Nukkühendus nukiprofiili abil võib saada vajaliku karakteristiku, pöördenurk 120 300 º . Automaatregulaatorid.
See on seade mis töötab koos objektiga ja reguleerib mingit parameetrit objektis. Reguleerimist iseloomustatakse järgmiste parameetritega: M KR = 1) regulaatori võimsustegur. Näitab kuidas muundatakse reguleerimisparameeter reguleerivaks toimeks. See on dimensiooniga suurus kui kas. tavalisi ühikuid. Ja dimensioonita suurust kui kas. suhtelisi ühikuid. Võib olla alla või üle ühe. 2) Süsteemi mittetundliku . See määratakse regulaatori m tundliku tsooniga mis näitab mis sisendsignaali muutumispiirkonnas ei tunne regulaator neid. M tundlikkuse lävi on minimaalne sisend signaali suurus kus regulaator hakkab tööle.
3) Regulaatori viide . Iseloomustab viite aega mille võrra regulaatori väljundsignaal hilineb sisendsignaalist. See sõltub m - tundliku tsooni suurusest ja reg. Inertsusest. Mida suuremad need on seda suurem on viide. suurenemisega süsteemi kvaliteet langeb sest suureneb ebastabiilsus. = M + i 4) Ajakonstant TR. Iseloomustab reg. Inertsust, sellest sõltub reg. Dünaamilised omadused
Regulaatori liigitus 1) Reg. Parameetri järgi N:t0, nivoo, P 2) Konstruktsiooni järgi
a) mõõteseadmega regulaator - sel juhul MS-I sisse ehitatud reguleerimisosa
b) eraldi olev reguleerimisseade c) plokkidest ehitatud regulaator - Reg. Kokkupanemiseks kasutatakse unifitseeritud plokke. See võimaldab laiendada võimalusi regulaatori töös
d) elementidel ehitatud regulaator sel juhul kas. eraldi olevad elemendid elementaarsete funktsioonidega 3) Reguleeriva toime järgi a) pideva toimega regulaator, nende reg, toime muutub pidevalt b) katkendliku toimega regulaator c) relee e. impulss regulaator 4) Lisa energia kasutamise järgi a) otse toime regulaatorid - nad kas. oma tööks mõõteseadme energiat b) kaudse toimega regulaator - nad kas. lisaenergiat anduri poolt saadud signaali võimendamiseks 5) Kasutatava energia järgi a) mehhaanilised reg. b) Elektrilised reg. c) Pneumoregulaator d) Hüdraulilised reg. e) Kombineeritud reg. 6) Info töötlemisviisi järgi a)
analoog reg. b) Digitaalsed reg. 7) reg seaduse järgi P, I, PI, PID, PD Otsetoimega regulaatorid Need on kõige lihtsamad, odavad, töökindlad, ebatäpsed. Otsetoimega temperatuuri regulaator
Nende reguleerimisseadmed kasutavad mõõteseadme energiat. Termoballoon on täidetud
madala
keemistemp . vedelikuga (etüülefiir). Kui temp. muutub siis termoballoonis tekib rõhk mis
kapillaari 2 kaudu antakse regulaatori sülfoonkarbi sisse ja sülfoon 3 surutakse kokku. Sülfoon on
seotud väljund vardaga 7 mille abil paigutatakse ümber klapid.
Mutriga 5 saab reguleerida vedru
4 pinget ja sellega pannakse paika ette antud temperatuuri suurus. Kohalik klappide asendi näitaja
6. Kui temp suureneb siis rõhk termoballoonis suureneb ja sellega klapid suletakse. Soojuse
kandja
vooluhulk väheneb ja temp objektis väheneb. See on P regulaator, ta omab staatilist viga.
Võib kasutada sooja vee temp. reguleerimiseks ja nende piirkond on 55-65, 60-70, 70-80. Täpsus
+-3-5. Otsetoimega rõhuregulaator
P- regulaator hoiab konstantset rõhku peale klapi. Kui rõhk objektis suureneb selle mõjul
membraan läheb alla ja klapid suletakse, suruõhu sissetulek väheneb ja samuti rõhk väheneb.
I- regulaator hoiab konstantset rõhku enne klappe. Staatiline viga puudub
Otsetoimega nivoo regulaator
Kui nivoo väheneb siis nukiga 2 paigutatakse kang 3 ülespoole ja varda 4 kaudu kang 5
paigutatakse alla ja nuki 6 ja kangi 7 abil klapid avatakse rohkem, see on P- regulaator.
Kulu regulaator
Ahendus
seadmel tekib rõhulang P mis sõltub aine kulust Q. See rõhulang mõjub membraanile
mis paigutab klapi ümber. Etteantud kulu suurus pannakse paika vedru pingega. Kui kulu
suureneb siis P1 suureneb, P2 väheneb selle mõjul membraan läheb alla klapp rohkem suletakse ja
sellest kulu väheneb.
Elektrilised regulaatorid
Need on lihtsad regulaatorid ja nende väljundis on relee, mille abil elektri ahel lülitatakse sisse
või välja. Sellised reg.
Seadmed võivad olla sisse ehitatud mõõteriista või ehitatud eraldi Joonis .
Näidikute 1 ja 2 peale on pandud lambid HL1; HL2 ja foto takistid R1; R2. Näidikud võib skaalale
asetada teatud piirkonda mille ulatuses tuleb parameetrid reguleerida. Lipuke 4 on kinnitatud
mõõteosuti 3 peale ja ta katab R1 ja R2 kui osuti on R1 ja R2 vahel. Kui osuti läheb paremale
avatakse R1 valgustatakse HL1 ga. R1 takistus väheneb ja rakendub K1 ja oma
kontaktiga võib
käivitada mootori ühes suunas K2 teises suunas.
Reguleeriv millivoltmeeter kontaktivaba väljundiga See on 2 positsiooniline regulaator. Põhi elemendiks generaator VT1-l mis genereerib kõrge
sageduse võnkeid 100kHz. L2 ja C3 võnke
kontuur mis määrab generaatori sageduse suuruse. L1
on tagasiside mähis, tema abil on positsioon ts mis paneb selle generaatori genereerima. C 2 laseb
läbi ainult vahelduvvoolu, C2 ei lase VT1 lühistada
alalisvooluga. R1 ja R2 määravad VT1 ööpunkti. C1 ja R3 on
filter mis ei lase k sagedus võnkeid
toiteallikasse. Kui skeem on voolu all siis VT1 hakkab genereerima ja need võnked lähevad VT2
baasile. + poolperioodil VT2 on avatud, - perioodil suletud. + poolperioodil läbivad VT2 kol.
Ahela ja R6; R5 tekib pingelang. C5 pulsatsiooni silumiseks. R6 tekkinud pingelang läheb VT3
baasile ja sellega see avatakse ja koormustakisti R K läbib vool. Selle vooluga võib käivitada
objekti. RK asemel võib kas ka relee mille kontaktid võivad midagi käivitada. VD kaitseb VT3
ülipingest kui VT3 sulgub. Sel hetkel relee mähisel võib tekkida kõrge pinge mis kahjustaks VT3.
Kui ahi on sisse lülitatud siis temp tõuseb, osuti näit suureneb ja kui näidik jõuab kriitilisse
punkti. Siis lipuke L1 ja L2 vahele, nende vaheline seos katkeb ja genereerimine katkeb.
Bimetall regulaator.
Kasut temp kahepositsiooniliseks reguleerimiseks temp muutusel valgevase toru pikeneb ja
tõmbab invari kontaktid lahti. Kruviga 1 saab invari plaatidele eelpingestuse ja sellega saab seada
temp mille juures kontaktid
avanevad .
Ahju skeemi töö. Kui S lülitatakse sisse siis relee K saab toite. K rakendub ja kontaktidega lülitab
ahju sisse ja samuti ka signaallambi. Ahi soojeneb ja kui
saavutatakse etteantud temp siis
termorelee kontaktid avatakse ja K tagastub ja ahi lülitatakse välja. Ahi jahtub termorelee samuti
ja protsess kordub.
Manomeetriline reguleerimine
Kui temp suureneb siis rõhk suureneb 6est läbi 5e sülfooni 4. Selle mõjul pööratakse kang 3 mille
abil paigutatakse kontakti grupp 8. Kontaktid võivad olla elavhõbe kontaktid. Kruviga 1 pannakse
vedru 2 eelpinge millega seatakse etteantud temp. Kruviga 7 võib reg. M tundliku tsooni.
Elektron regulaatorid
Kasut. Igasuguste parameetrite reguleerimiseks, suur täpsus ja kiirus. Nad võivad teostada P, I, PI,
PID reg. Seadusel. Nad võivad olla kitsalt spetsialiseeritud mingi kindla parameetri
reguleerimiseks ja võivad olla
universaalsed mida võib kasut kõikide parameetrite
reguleerimiseks. Sellised regulaatorid omavad sisendit kuhu antakse unifitseeritud signaal ja uni.
Signaal formeerimiseks kas.
spets plokke mis muundavad anduri signaali unifitseeritud
signaaliks. Elektron
regi . Võib kasut kombineeritud süsteemides kus juhtimine teostatakse elektronide abil aga täitur
mehhanismiks võib olla pneumo- või hüdrotäitur mehhanism. MS-s võrreldakse s-ist saadud
seadmega ja kui on erinevus siis võimendab selle signaali ja
saadab reguleerimisplokki. RP
formeerib sellest signaalist juht
signaali TSS-I abil. ÜL võimaldab TM juhtimist ümber lülitada automaat reziimi. või käsi reziimi
juhtlüliti poolt. IC asemel võivad olla juhtimisnupud. KS on kontaktor või türistor TM mootor. Elektron regulaator RVL-45
Kasutatakse soojussüsteemides hoonete temp reguleerimiseks. Seda võib kasut suurtes hoonetes.
Reg. võimaldab juhtimist el.
mootoriga mis paneb klapi kinni / lahti võib juhtida el soojendit,
võib juhtida põletit kateldes, tema abil saab piirata tuleva vee min / max temp ja samuti ka
väljuva vee min / max temperatuuri. Võimaldab teostada ökonoomset reguleerimisreziimi.
Võimaldab teostada kiirkütet,
arvestab reguleerimisprotsessi käigus välistemp muutust. Samuti
arvestab tuule suunda ja päikese kiirgust. Võimaldab piirata min temp ruumis. Võimaldab
teostada
pumpade välja lülitamist viitega.
Pumbad töötavad 5 min pärast seda kui klapp sulgub,
või põleti
kustub . Sellega eemaldatakse soojuse akumuleerumist (jahutab katla maha). Võimaldab
pumpade katkendliku käivitamist. Iga 18 tunni järel tsirkulatsiooni
pump lülitatakse 30 sek tööle.
Sellega kontrollitakse pumpade tööd eemaldatakse vees olevad osakesed. Regulaator võimaldab
üle kanda signaalid kaugemale. B1 - tuleva vee temp andur, B2 - väljuva vee temp andur, B3 -
väliskeskkonna temp andur, Y1 - elektriajam ta mõjutab 3 käigulist ventiili ja sellega
reguleeritakse tuleva vee temp. M1 - tsirkulatsiooni pump, mis juhitakse regulaatori poolt ta
kindlustab vee pideva tsirkulatsiooni torudes. M2 - tsirkulatsiooni pump mis kindlustab
tsirkulatsiooni katla suures süsteemis.
Kui kasutada, keskkütte süsteemi, sel juhul soojusvõrgust tuleva vee temp võib kõikuda ja on
vaja, et teha kaitsmist temperatuuri max piiri ületamisest. Sel juhul kas kaitseseadet. F 1 - kaitse
termostaat mis kaitseb süsteemi ülekuumenemisest, kui temp ületab etteantud temp, siis ta otse
lülitab täiturmehhanismi Y1 millega klapp (tuleva vee) pannakse kinni.
Välisseadme ühendusskeem.
F1 - kaitse termostaat mis piirab tuleva vee max temperatuuri. Kui kas. ajamit kus 21
puudub siis kaitse termostaadi juhe 3 ühendatakse Y2. M1tsirkulatsiooni pump, B1 - tuleva vee
temp andur, B2 - väljuva vee temp andur, B3 - kaugjuhtimispult (50m), H3 - signaallambi
juhtimine, B4 - välistemp andur, B8 - tule andur, G8 - toide 24 V, M - 0juhe, U4 - pinge mis vastab
välistempile., Z2 - vastab väljuva vee tempile., H1 - taimeri signaal, U4; Z2;H1 - need signaalid võib
saata alluvatele regulaatoritele, H4 - minimaalse voolu piiramise signaal.
Pneumaatilised automaatikasüsteemid. Kasut. Väga laialdaselt tänu oma positiivsele omadustele. Energia
kandjaks on surutud õhk. Toite
rõhk kuni 7 Bar.
Eelised:
1) Õhk on kergelt kättesaadav ja kõikjal olemas.
2) Suruõhku on kerge transportida, liinide ja torude abil
3) Suruõhku saab akumuleerida
4)
Plahvatus ja tuleohutus, pneumaatilistel seadmetel puuduvad sädelevad kontaktid ja tule oht puudub, kas keemia tööstuses.
5)
Pneumoautomaatika seadmed on ökoloogiliselt puhtad. Läbitöötatud õhk ei ole saastatud
6) Pneumoseadmed võimaldavad teostada keerulisi reguleerimisi
7) Omavad küllaldast töökiirust 1-2 m/s pneumosignaal 340 m/s
8) Saab üle kanda kaugemale kui
200m 9) Suruõhu
ajamid on tundetud ülekoormusele
Puudused:
1) Toite õhk peab olema puhas ja kuiv. Selleks on vaja spets õhuvarustus süsteemi, mis kindlustab suruõhu vajalikud parameetrid.
2) Kui kasutada palju seadmeid, siis on vaja palju pneumoliine, mis võtavad palju ruumi.
3) Liinipikkus on piiratud (200 m).
4) Suruõhu väljumisel atmosfääri kutsub esile müra. Seda on vaja aga
summutada .
5) Õhu kokkusurutavuse tõttu ei saavutata mitme kolvi üheaegset liikumist.
6) Pneumoajamite väljundjõud on piiratud 20...30 KW.
Õhuvarustussüsteemi
plokkskeem .
See süsteem annab puhta, kuiva suruõhu. Seal on
kompressor ja õhu ettevalmistus seadmed.
Kui süsteem on väike, siis kasutatakse ühte kompressorit, mille
tootlikus peab vastama süsteemi
tarbimisele . Suurtes ettevõtetes, kus pneumoseadmete hulk on suur, kasutatakse 2 või 3
kompressorit põhi,
tagavara ja avarii kompressorit. 1)Filter 2)
Kompressorid (põhi- ja tagavara) 3)Jahutaja 4)Jahutus vesi 5)Ressiiver (vastuvõtja) 6)Vee väljalaske klapp 7)Rõhu mõõtja 8)Kaitse klapp 9)Õli
eemaldaja 10)Õhukuivataja 11)Regulaator 12)Filter 13)Reduktor, alandab rõhku . Filter (1) pannakse tavaliselt jahedasse kuiva kohta. Kus õhk vähe saastub. Kompressori (2) töö
käigus õhu surumisel ta soojeneb ja teda on vaja jahutada. Jahtumisel valatakse välja läbi (6)-e.
(5)-es õhk kogutakse ja õhu paisumisel osa veest langeb välja. Kompressori töö ajal õhu sisse
sattuvad õliosakesed eemaldatakse
filtriga (9), mis võib olla filtreerimiselemendiga või
tsentrifugaal - õli eemaldajaga. Peale õli eemaldamist õhk on vaja kuivatada. Selleks eemaldada
vee aur õhust. Vesi, kui ta ei eemaldata kustub esile korrosiooni või ummistab düüsid ja võivad
tekkida jääkorgid. Tavaliselt õhk peab olema nii kuiv, et kastepunkt on 40C. Peale kuivatamist pannakse rõhuregulaator, mis hoiab konstantset rõhku. Rõhk 5-8 Bar Peale
rõhu regulaatorit pannakse lõppfilter, millega eemaldatakse metallosad ja õli jäänused. Filter võib
olla vilt või keraamiline filter.. Peale
filtrit õhk läheb reduktorisse kus ta alandatakse vajaliku
rõhuni.
Kompressor.



























































Kõik kommentaarid