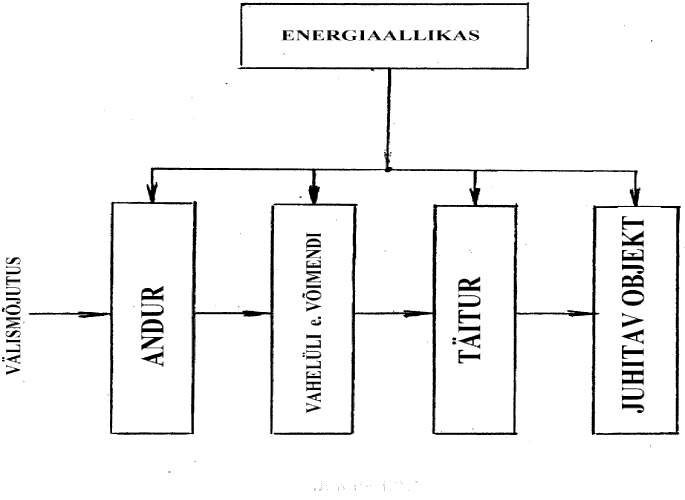
3.ANDURID JA NENDE MÕÕTEPRINTSIIBID. 3.1.Andurite definitsioon ja liigitus. Anduritele esitatavad nõuded, ideaalkarakteristikud. Andur on automaatsüsteemi osa, mis muundab kontrollitava suuruse mõõtmiseks, edastamiseks, säilitamiseks, registreerimiseks, võimendamiseks või juhitavasse seadmesse suunamiseks sobivasse vormi (optiliseks, mehaaniliseks või elektriliseks signaaliks). Andur koosneb tavaliselt tajurist (esmamuundurist) ja ühest või mitmest vahemuundurist. Mõnel juhul moodustab anduri ainult tajur (nt. termopaar, takistustermomeetri andur). Joonisel 0.2.1 on toodud tüüpilise anduri plokkskeem. Andurid liigitatakse füüsikalise tööpõhimõtte järgi: 1. elektrisuuruste muutusel põhinevad andurid : induktiivandurid, mahtuvusandurid, takistusandurid; 2. optilised, kasutavad elektrimagnetilisi protsesse lainepikkustel üle 10¹² Hz.; 3. mehaanilised, kasutavad tahkete kehade liikumist; 4. hüdraulilised, kasutavad vedelike mehaanilisi omadusi; 5. pneum
SISUKORD SISSEJUHATUS......................................................................................................................3 1. ANDURID..............................................................................................................................4 1.1. Induktiivandur...............................................................................................................6 1.2. Magnetväljaandur........................................................................................................9 1.3. Optoelektroonilised andurid.....................................................................................13 1.4. Mahtuvusandur..........................................................................................................17 2. MITTEELEKTRILISTE SUURUSTE MÕÕTMINE.......................................................20 2.1. Temperatuur................................................................................
Eksamiküsimuse õppeaines ,,Soojustehnilised mõõtmised", Mõõtmiste üldküsimused 1. Mõõtmise mõiste. Mõõtmise meetodid. Mõõtevahendid. Mõõteriist. Mõõteandurid ja mõõturid. Mõõteriistade klassifikatsioon. Mõõtmine on füüsikalise suuruse kvantitatiivne võrdlemine mõõteseadme poolt reprodutseeritava mõõtühikuga. Mõõtmine võib olla otsene või kaudne. Otsesel mõõtmisel määratakse mõõdetava suuruse arvväärtus just selle füüsikalise suuruse mõõtmiseks valmistatud mõõtevahendi abil, kaudsel arvutatakse otsitav suurus mõõdetud otseste suuruste järgi. Mõõtevahend, mis näitab mõõdetava suuruse väärtust, on mõõteriist. Mõõteriist võib olla otselugemmõõteriist, mille lugemisseadis esitab mõõtetulemuse mõõdetava suuruse ühikutes, või võrdlusmõõteriist, mis hangib mõõtetulemuse mõõdetava suuruse mõõtudega võrdlemise teel (nt lauakaal vihtide komplektiga). Mõ?
Eksamiküsimuse õppeaines ,,Soojustehnilised mõõtmised", õ-a 2006/2007 Mõõtmiste üldküsimused 1. Mõõtmise mõiste. Mõõtmise meetodid. Mõõtevahendid. Mõõteriist. Mõõteandurid ja mõõturid. Mõõteriistade klassifikatsioon. Mõõtmine on füüsikalise suuruse kvantitatiivne võrdlemine mõõteseadme poolt reprodutseeritava mõõtühikuga. Mõõtmine võib olla otsene või kaudne. Otsesel mõõtmisel määratakse mõõdetava suuruse arvväärtus just selle füüsikalise suuruse mõõtmiseks valmistatud mõõtevahendi abil, kaudsel arvutatakse otsitav suurus mõõdetud otseste suuruste järgi. Mõõtevahend, mis näitab mõõdetava suuruse väärtust, on mõõteriist. Mõõteriist võib olla otselugemmõõteriist, mille lugemisseadis esitab mõõtetulemuse mõõdetava suuruse ühikutes, või võrdlusmõõteriist, mis hangib mõõtetulemuse mõõdetava suuruse mõõtudega võrdlemise teel (nt lauakaal vihtid
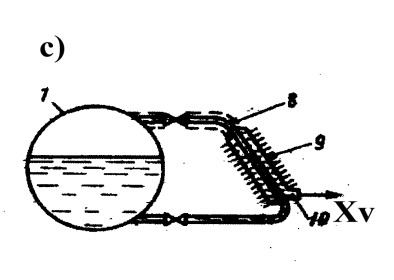
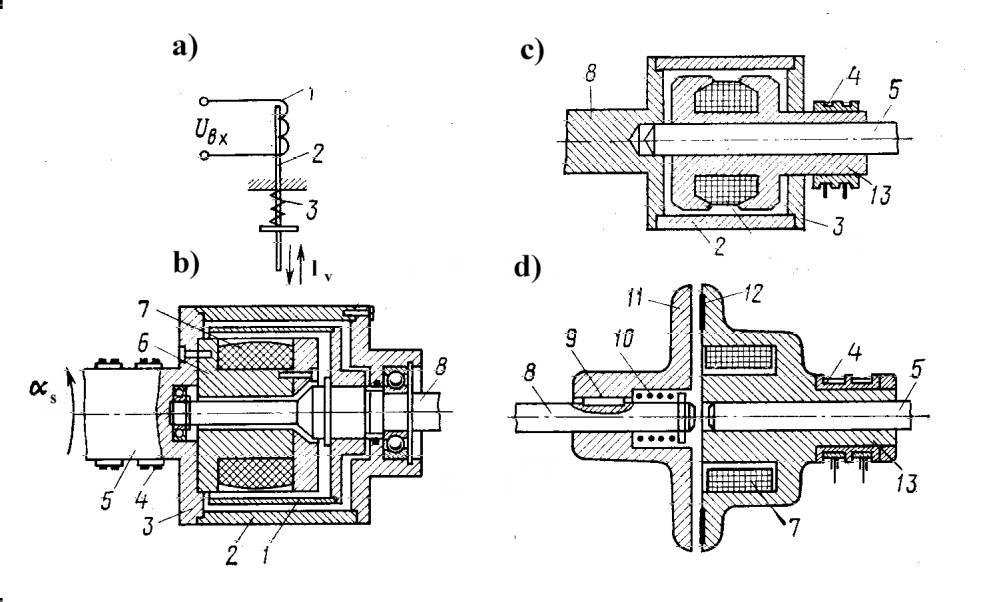
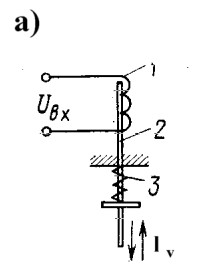
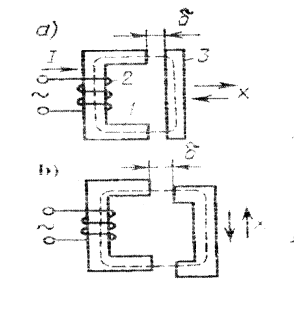
Juhtimine ja automaatjuhtimine.Küberneetika? Juhtimiseks nim mingi saada tajureid, mille mahtuvus C on lineaarses sõltuvuses paagis oleva vedeliku masina või protsessi mõjutamist, nii et selle töö annaks soovitatud tulemuse. ruumalast V, s. t. C = c V, kus c on tajuri erimahtuvus Juhtida võib inimene või masin ise. Käsitsijuhtimise korral on kõik Induktiivtajurid?-Induktiivtajuriteks nimetatakse suurt rühma tajureid, kus juhtimisfunksioonid usaldatud inimesele. Automatiseeritud juhtimisel on need sisendsuuruse (deformatsiooni, nihke, jõu, momendi) muutus põhjustab jaotatud inimese ja automaatide vahel. Automaadid täidavad funksioone ,mida elektromagnetilise süsteemi induktiivsuse muutumist. Lugedes suhteliselt inimene pole füüsiliselt võimeline täitma, või pole inimesle vastuvõetavamad. väikese õhupiluga ferromagnetilises süsteemis puistevoo tühiseks, võib mähise Automaatjuhtimisega
Soojusautomaatika eksamiküsimuste vastused 1. Põhimõisted automatiseeritud tootmise alalt. Automaatikasüsteemide klassifikatsioon nende otstarbe järgi. Näited. Automatiseeritud tootmise põhimõisted: 1. Objekt 2. Regulaator 1. Andur 2. Tajur 3. Automaatikasüsteem Automaatikasüsteemide klassifikatsioon otstarbe järgi: 1. Automaatreguleerimise süsteemid (ARS) 2. Distantsioonjuhtimise süsteemid (DJS) 3. Tehnoloogilise kaitse süsteemid 4. Automaatblokeeringu süsteemid (ABS) 5. Reservseadme automaatse käivitamise süsteem (RAKS) 6. Automaatsed tehnoloogilise kontrolli süsteemid (ATKS) 7. Signalisatsioonisüsteemid (SS) valgus ja helisüsteemid 1. Tehnoloogiline SS andmed seadmete töö ja üksikute parameetrite kohta 2. Avarii SS teatavad võimalikest avariilistest olukordadest ja juba tekkinud avariidest 3. tsentraalsed SS on ette nähtud signalisatsioonisüsteemi korrasoleku ja
Tallinna Polütehnikum Energeetika õppesuund Rein Kask ELEKTRIAJAMITE JUHTIMINE Õppevahend TPT energeetika õppesuuna õpilastele Tallinn, 2007 Saateks Erialaainete õpikute ja muude õppevahendite krooniline puudus on juba palju aastaid raskendanud kutsehariduskoolide õpilastel omandada erialaseid teadmisi. Käesolev kirjatöö püüab mingilgi määral leevendada seda olukorda Tallinna Polütehnikumi energeetika õppesuuna õpilastele sellise õppeaine kui ,,Elektriajamite juhtimine" õppimisel. Elektriajamid on üheks põhiliseks elektritarvitite liigiks ja neid kasutatakse laialdaselt kõikides eluvaldkondades. On selge, et tulevased elektriala spetsialistid peavad neid hästi tundma ja oskama neid ka juhtida. Elektriajamite juhtimine ongi valdkonnaks, mida käsitleb käesolev õppevahend. Selle koostamisel on autor lähtunud põhimõttest selgitada probleeme nii põhjalikult kui vajalik ja nii napilt kui võimalik siit ka õppe-
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaatset käivitust, reversee


























Kõik kommentaarid