kauguselt (peab olema ilma katteta ja puhas). Suunatule laternad Alates 1980. valmistamisaastast peavad masinal olema eesmised ja tagumised suunatule laternad. Suunatulede värvus peab olema merevaigukollane ja vilkumissagedus 90 ± 30 korda/ min. Suunatulede kontrolliks peab armatuurlauas vilkuma sünkroonselt roheline märgulamp. Muud tuled ja tunnusmärgid Ohutuled Ohutuledena lülitatakse üheaegselt vilkuma kõik suunatuled. Ohutulede töö kontrolliks peab auto armatuurlauas vilkuma sünkroonselt märgulamp. Ohutulesid peab olema võimalik lülitada sisse nii töötava kui ka mittetöötava mootori korral. Autorongi tunnusmärk Haagist vedaval masinal peab kabiini või kere esiosa kohal olema masinarongi tunnusmärk, milleks on üks kollane ümmargune latern läbimõõduga vähemalt 70 mm või kolm masina pikiteljega risti olevas reas asuvat kollast laternat vahedega 150...300 mm. Helkurid
kõverpinnalistele labadele ja paneb viimase pöörlema. 2. Sisepõlemismootorite liigid Turbiinmootorid jaotuvad: -1 1) auruturbiinmootorid (alates mõni kW... 1200 MW ja rohkem, n = 30 000 min ): e aktiivturbiinid, b) reaktiivturbiinid (töötava aine töö = voolsuuna muutumine + paisumise reaktiivjõud, mille osatähtsus on üle 50%) ; 2) gaasiturbiinmootorid ( võivad tarvitada gaas-, vedel- või tahket kütust) 3) hüdroturbiinmootor(tavaliselt statsionaarne): aktiivturbiinid, b) reaktiivturbiinid Kolbmootorite liigitus on laiaulatuslik. J. Ivandi esitab mootori tööprotsessi mõistmise seisukohalt järgmise liigituse: 1) teoreetilise ringprotsessi põhjal: a) kütuse teoreetiliselt püsivmahulise põlemisega (Ottoringprotsess),
võtab vastu survet ja neljast silindervedrust võtavad vastu tõmmet. Andur on varraste kaudu ühendatud täiturmehhanismiga. Asendiregulaatori anduriks on riputusseadme pöördhoob. Regulaator on täiturmehhanismiks. Omab kolm asendit: · Välja lülitatud · Reguleerimine · Tõste. Asendis "välja lülitatud" regulaator hüdrosüsteemi tööd ei mõjuta. Asendis "tõste" toimub tööseadme tõstmine. Asendisse "reguleerimine" tuleb seada juhthoob sektoril enne töö alustamist. Õige künnisügavuse saavutamisel fikseeritakse käepide ja regulaator jätkab tööd automaatselt. Hüdrosüsteemi tehniline hooldamine Hüdrosüsteemi hooldamine viiakse läbi vastavalt tehase juhendile. Tehnilisel hooldamisel tuleb erilist tähelepanu pöörata järgmistele töödele: · Liitekohtade hermeetilisus · Sõlmede, torude ja voolikute kinnitus · Õli tasapind ja õigeaegne vahetus · Määrimine vastavalt määrimiskaardile.
Soojuse eemalejuhtimiseks kasutatakse jahutussüsteemi, mida on kasutusel kaks: õhkjahutussüsteem ja vedelikjahutussüsteem. Kõige sobivama soojusreziimi tagab mootorile vedelikjahutussüsteem. Ülekuumenenud mootoris suureneb detailide kulumine, võimalik on kolbide kinnikiilumine silindritesse. Ülejahutatud mootoris kütus aurustub halvasti, ei sütti korralikult ega põle täielikult. Mootori töö on normaalne ja ökonoomne ainult kindlal temperatuuril (90...95°C). Vedelikjahutussüsteemis ringleb vedelik nimetusega antifriis so külmumiskindel vedelik. Antifriis on kasutatav aastaringselt. Sügisel enne külmade tulekut tuleb kontrollida antifriisi tihedust , mis meie kliimas peaks olema 1070 kg/m³. Kui vedeliku tihedus on sellest väiksem lisatakse kontsentraati ja kui suurem siis destilleeritud vett. Antifriisi kasutusaeg on kolm aastat
.. 15mJ) ja kestus (1...2ms). Kui sädelahendusel ei ole piisavalt energiat või jääb ta kestus lühikeseks, ei sütti kütusesegu alati ja mootor jätab (töötakte vahele). Siis suureneb kütusekulu, sest töötavaid silindreid koormatakse rohkem. Kui neljataktiline mootor töötaab kuuldavalt ebaühtlaselt, siis kulutab ta kütust kuni 30% rohkem. Mittetöötavas silindris põlemata jäävast küttesegust eralduv bensiin halvendab silindriseinte määrimist. Mootori ebaühtlane töö põhjustab vibratsiooni ja kahjustab kogu mootoriga käitatavat masinat. Küttesegu süütamine peab toimuma õigel hetkel. Hiline süütamine põhjustab kütuse ülekulu ning mootori võimsuse langust, liig varane aga detonatsiooni mootori silindris. Pidev detonatsioon kahjustab kõigepealt kolbi ja pikemal mõjumisel põhjustab selle purunemise. Süütesüsteemi arengus saab eristada mitut etappi. Esimene etapp oli magneetosüütesüsteem,
vikäiku. Protsessi või selle osa, mis toimub silindris ühe kolvikäigu vältel, nimetatakse taktiks. Kolvi liikumine silindris on seotud ka silindri ruumala muutumisega. Ruumi mahuga Vc, mis ü. s. seisus jääb kol- vipõhja ja silindrikaane vahele, nimetatakse põlemis- ehk s u r v e k a m b r i k s. Ruumi, mille. kolb vabastab lii- kumisel ü. s. seisust a. s. seisu, nimetatakse silindri töö - r u u mi k s j a s e l l e ma h t u V H -- t ö ö ma h u k s . K u i mootoril on rohkem kui üks silinder, siis nende töömah- tude summa on mootori töömaht; seda mõõdetakse kuup- sentimeetreis. Mootori töömahu suuruse järgi liigitatakse mootorrattad järgmistesse klassidesse: 50,75, 100, 125, 175, 250, 350, 500, 750 ja 1000 cm3. Silindri tööruümi-ja.põlemis- kambri mahud kokku annavad silindri üldmahu'.Va.'.';.
Neljalabalised on töös püsivamad, vibreerivad vähem ning tagavad pinna parema puhtuse. Pöörlemissagedus on kuni 200 p/ min. Jämepuhastust tehakse madalamatel pööretel, peenlihvimist ja kõvema pinna puhastamist tehakse kõrgematel pööretel. Ketaslihvimismasin See koosneb peale kettakujulise tööorgani elektrimootorist, tigureduktorist, juhtimiskäepidemest ja käiguosast. Käiguosa kasutatakse ainult objektil liikumiseks töö ajal see demonteeritakse. Pöörlemine mootorilt kettale kantakse üle kiilrihma abil läbi tigureduktori ja kaitsesiduri. Sidur hakkab tööle kui moment ületab lubatava kaitstes selliselt töölist. Ketaslihvmasinate jõudlus on väiksem, kuid nad tagavad parema kvaliteedi ja samuti tekkiv vibratsioon on väiksem. Mosaiiklihvmasinad Koosneb korpusest, reduktorist, elektrimootorist, juhtimiskäepidemest ja käiguosast. Pinda
vormistada. Vajalikul määral on õpikus toodud levinumad ingliskeelsed terminid koos nende eestikeelsete vastetega. Suurt tähelepanu on pööratud kiirabitöö eetikale, tööstressile ja töös esinevatele ohtudele. Realistlikud näidisjuhtumid annavad ettekujutuse kiirabi töökeskkonnast, kuid ka õige ja ratsionaalse lahenduse keerukamatele situatsioonidele. Mahukas praktiliste oskuste peatükk annab teoreetilised alused töö professionaalseks sooritamiseks nii individuaalselt kui kiirabibrigaadi koosseisus. Õpikusse on kokku kogutud erialane teave ja töövõtted nii Euroopast kui Ameerikast, mille koostajad on sidunud Eestis kehtivate ravi- ja tegevusjuhiste, õigusaktide ja õpiku koostamise ajal eksisteerinud reaalsete võimalustega. Head õppimist! Raul Adlas toimetaja 3 SISUKORD Erakorralise meditsiini tehniku eetikakoodeks…………………….……………………………… 10 1









































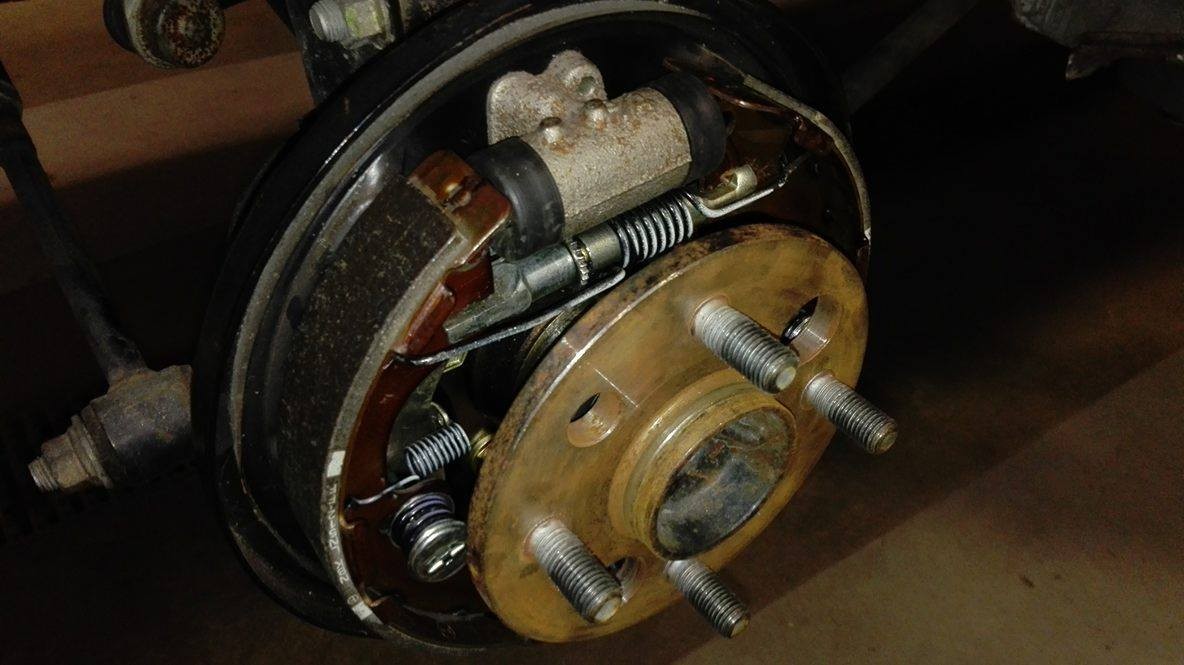
![Sele 15. Tagumine rattalaager[9]](./mpic/162470/Backup-10_2.jpg)



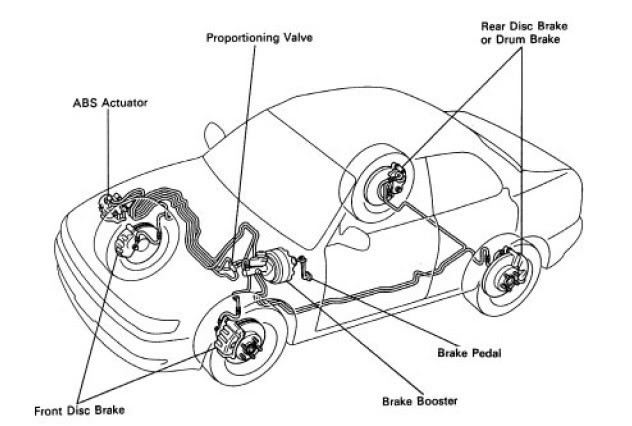



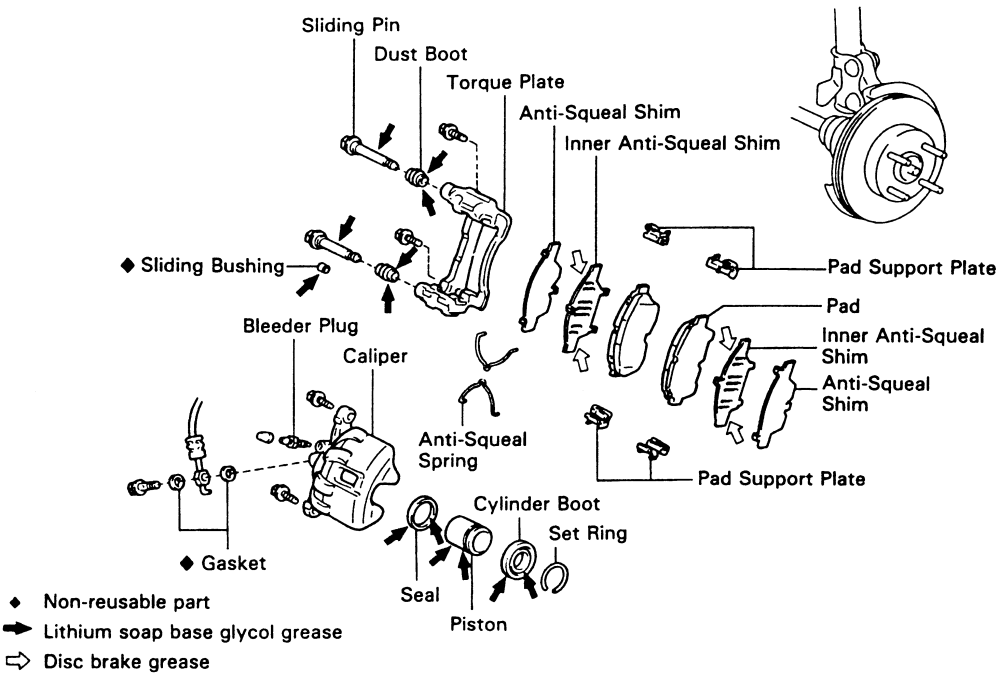
![Sele1. Esimene pidurisüsteem[1]](./mpic/162470/Backup-22_2.png)




Kõik kommentaarid