Operatsioon võimendid:
Operatsioon
võimendid on integraalselt teostatud
universaalsed võimenduselemendid, mida võib kasutada väga mitmeti, sõltuvalt
lisatud elementidest. Operatsioon võimendil on kaks väljundit, üks
väljund ja teda toidetakse kahe polaarse sümeetrilise pingega (+, -
maa suhtes). Plussiga tähistatud
sisendit loetakse mitte
inventeerivaks sisendiks ja sinna antav
signaal tekkitab väljundis
samafaasilise signaali. – tähistatud sisendit loetakse
inventeerivaks sisendiks ja sinna antud signaal tekitab väljundis
vastasfaasilise signaali. Op võimendi on
alalispinge võimendi,
seetähendab tema võimendus sageduse alumine piir on 0. see omadus
tingib omakorda võimendi sees otsese sidestuse kasutamise ja
vajaduse sümeetrilise
toitepinge järele. Op võimendi võimendus
tegur on väga suur vähemalt 20 000- 1 000 000 korda. Ja seetõttu
kasutatakse tema
kasutamisel negatiivset tagasisidet, mis võimaldab
kujundada täpsemalt võimendi omadusi. Kui anda mitte
inventeerivasse sisendisse üsnagi väike
sisend pinge (näiteks
10mV), siis läheb väljund positiivsesse küllastusse, kus väljund
pinge on ligilähedane positiivse toitepingega, kui aga anda sama
pinge inveneerivasse sisendisse, siis
tekkib väljundis negatiivne
küllastus, kus väljundpinge on ligilähedane negatiivse
toitepingega.
Kasutatava toitepinge väärtus määrab ühtlasi
maksimaalse väljund pinge amplituudi. Sageli vaadeltakse Op
võimendit ideaalse võimendus elemendina, mille
sisend takistus on
lõppmata suur (tegelikult 10Kohmist-10Mohmini väljund takistus 0
tegelikult mõnest ohmist mõne kümne ohmini, võimendustegur
lõppmata suur tegelikul 20 000- 1 000 000, tema sagedus riba
eeldatakse olevat lõppmata lai, tegelt alumine sagedus piir on 0,
ülemine sagedus piir sõltub aga Op võimendi tüübist ja on mõne
kümnest kilohertsis mõne kümne megahertsini). Valmistatakse
erineva element baasiga Op võimendeid ja sellest tulenevalt võivad
olla Op võimendite omaduse ka küllalt erinevad. Ühesugune kõigile
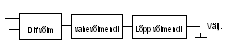
Op võimenditele on aga nende plokkskeem ja mingil määral ka
sisendaste.
Diferentsiaal lülitus on
lülitus, mis võimaldab eri sisendite erinevat toimet, seetähendab,
on võimalik mitte inventeeriv sisend ja inventeeriv sisend.
Vahevõimendi on see element, mis tagab Op võimendile suure
võimendus teguri. Lõppvõimendi tagab Op võimendile väikese
väljund takistuse ja nõutava väljund voolu väärtuse. Reeglina
sisaldab lõpp võimendi ka kaitselülitust, mis väldib võimendi
riknemist väljundi lühise korral. Selleks et Op võimendi
sisendtakistus oleks võimalikult suur kasutatakse sisend astmetes
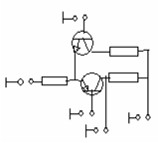
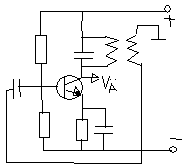
kas välja transistore, või emitteri järgureid. Dif. võimendi
skeem on järgmine:
Diferentsiaal võimendi
võimendus
astmed on omavahel sidestatud ühise emitter takistuse
kaudu, kui me anname esimesse sisendisse positiivse signaali, siis
hakkab suurenema VT1 kollektori vool ja ka vool läbib emitter
takistuse. Emitter takistusel tekkib pingelang, mille pluss on
suunatud VT2 emitterile, see on samaväärne teise transistori
sisendpinge vähenemisega, ning see toob kaasa teise transistori
kollektor voolu vähenemise ja väljund pinge tõusu. Järelikult on
esimese sisendi toime mitte inventeeriv, sest sisend pinge
suurendamine , seal, toob kaasa väljund pinge suurenemise.
Andes pinge teise sisendisse, tekkitab see teise transistori kollektor
voolu suurenemise, see aga omakorda vähendab kollektor pinge,
järelikult on
teisse sisend toime inventeeriv. On oluline, et sisend
signaalide puudumisel oleks väljund pinge 0. Kollektor
pinged on
tavaliselt aga ikkagi tööpunktiga määratud ja kui kasutaks
tavalist otsese sidestusega võimendust, siis me ei saa kuidagi
väljund pinget nulliks. Kui aga kasutada sümeetrilist toidet,
seetähendab kahte toite allikat, siis on lülituselementide sobiva
valiku korral võimalik saada olukord, et sisend signaalide
puudumisel on väljund pinge, maa suhtes, 0. Kuna Op võimendi on
põhimõtteliselt alalispinge võimendi, siis esineb seal nähtus
nimega
triiv .
Triivi all mõistetakse väljund signaali muutust, mille põhjuseks
ei ole mitte sisend signaali muutus vaid mingi muu põhjus. Väljundis
ei ole aga mitte kuidagi võimalik eristada kas signaali muutuse
põhjuseks on sisend signaal või mingi muu. Praktiliselt on
suuremateks triivi põhjusteks temperatuuri ja toite pingete
muutused. Vaadeldavad lülituses toovad need muutused kaasa kollektor
vooli muutusi. Kui meil ühel nimetatud võimalusel suureneb meil
esimese astme kollektor vool siis peaks suurenema ka väljund pinge
(mitte inventeeriv toime). Kuid kui samal ajal tekkib ka teises
transistoris, siis püüab see hoopiski väljund pinget vähendada,
need toimed kompenseerivad teine teist ja praktiliselt triiv kaob. Op
võimendeid iseloomustatakse terve rea parameetritega:
1.Toitepinge-
See on
kahepolaarne toitepinge, mille korral on tagatud tehnilistes
andmetes antud
parameetrid . Eri tüüpi Op võimenditel on toitepinge
vahemikus 3-200V. Reeglina töötavad Op võimendid ka madalama
pingega aga see toob kaasa parameetrite muutusi.
2. Tarbitav vool- See on
tarbijate tarbitav vool
normaal töö reziimis. Tarbitava voolu
väärtus sõltuv koormus takitstusest ja väljund
voolust .
3.Suurim
lubatav sisendpinge-
Võidakse anda kas ühe sisendi suhtes või sisendite vahelise
pingena, enamasti on tema väärtus võrdne toitepingega.
4.Nihke
pinge- Nihke pinge
all mõistetakse väljund pinge erinevust 0st kui sisend pinged on
nullid . Parameetrina antakse
nihkepinge sisendi suhtes ja ta on
kujuteldav sisend pinge, mille toimel väljund pinge
nihe muutub
nulliks. Nihke pinge väärtus sõltub Op võimendi tüübist ja on
vahemikus 0,01-6mV. Mõnedel Op võimenditel on ette nähtud võimalus
reguleerida nihke pinget nulliks väljast poolt lisatava
potensiomeetriga.
5.Sisend
takistus-
Kasutatakse
kahesugust sisend takistuse mõistet: Sisend takistus
erinevus signaalile: see on siis kui signaal antakse sisendite
vahele. Sisend takistus ühissignaalile: See on olukorras kus
mõlemasse sisendisse antakse
samasugune signaal maa suhtes.
6.Pinge
võimendus tegur- See
on väljund ja sisendpinge suhe, mida tagab antud Op võimendi.
Mõnikord antakse pinge võimendus ühikutes V/mV kohta (vastavalt
väljund/sisendpingele).
7.Väljund
pinge suurim amplituud -
See on suurim väljund pinge amplituud, mida antud võimendilt on
võimalik saada, ta on toitepingest mõnevõrra väiksem.
8.Ühissignaali summutus tegur- See
on op võimendi võimendus teguri ja ühispinge võimendus teguri
suhe. Kui mõlemasse sisendisse anda samaaegselt ühesugune signaal
ja kui op võimendi oleks mõlema sisendi suhtes ideaalselt
samasugune, siis peaks see summutus tegur olema lõpmatta suur. See
tähendab et väljund pinge peaks olema 0. Praktiliselt on aga op
võimendid erinevatele sisenditele mõnevõrra erinevate omadustega
ja seetõttu on see tegur 60-120Db.
9.Toitepinge
muutuse summutus tegur-
See on tegur mis näitab kui võrd
kajastub väljund signaalis
toitepinge muutus. Ideaalis on see 0.
10.Väljund
vool- See on suurim
väljund voolu väärtus, mille juures on op võimendi
parameetrid tagatud. See
parameeter iseloomustab op võimendi koormatavust.
11.Väljund
pinge kasvu kiirus-
Väljund pinge muutumise kiirus sisend pinge hüppelise muutuse
korral.
12.Transiit
sagedus- Tähis fT
See on sagedus
mille juures op võimendi võimendus tegur on langenud 1ni.Kaks
viimast parameetrit iseloomustavad sagedus omadusi ja on omavahel
seotud.
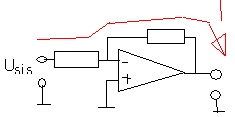
Op võimendi
põhilülitused.Op
võimendi kasutamine põhineb kahel põhiskeemil: mitte inventeeriv
ja inventeeriv.
Op
võimendit, kui elementi, käsitletakse nende lülituste korral
ideaalsetena, sest ka reaalselt on op võimendid mitmete parameetrite
osas ideaalsele lähedased.
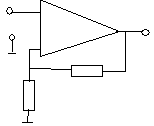
Mitte inventeerival võimendil
antakse sisend pinge mitte inventeerivasse sisendisse,
inventeerivasse sisendisse antakse aga väljundist läbi tagasiside
ahela tagasiside pinge. Kuna op võimendite sisend pinge toime on
vastas faasiline, siis on tekkiv tagasiside negatiivne tagasiside.
Sest kui sisend pinge püüab väljund pinget suurendada, siis
inventeerivasse sisendisse toimiv pinge püüab hoopiski väljund
pinget vähendada. Seejuures
püüab tagasiside pinge vähendada väljund pinget seni kuni
sisendite vaheline pinge muutub nulliks,
see on sisendite pinged muutuvad võrdseks ja taolisel juhul tekib
lülituses tasakaalu olukord. Toodust
selgub , et op võimendiga
võimendi võimendus tegur ei sõltu üldse op võimendi kui elemendi
võimendus tegurist, vaid ainult tagasiside elementidest. Toodud
lülituse sisendtakistus on märksa suurem kui op võimendi
sisendtakistus, see on
seletatav tagasiside toimega. Kui me anname
võimendi sisendisse mingi pinge, siis see tekkitab sisendvoolu.
Tagasiside mõjutab aga sisendite vahet sellisena et see läheneb
nullile, järelikult väheneb sisned vool. Sisend voolu vähenemine
on aga samaväärne sisend takistuse suurenemisega. Praktiliselt jääb
sisendite vahele ikkagi mingi pinge, kui see ei ületa 1mmV.
Vastavaslt sellele on mitteinventeeriva võimendi sisendtakistus suur
ulatudes praktiliselt kuni
100M .
Väljundtakistus samal ajal väheneb. Kui me suurendame võimendi
koormust (vähendame väljundisse pandud takistust) , siis tekkib
väljund voolu suurenemine. Op võimendi väljundtakistusel suureneb
aga pingelang ja väljund pinge väheneb. See toob kaasa ka
tagasiside vähenemise. See tähendab, et väheneb pinge
inventeerivas
sisendis . Järelikult suureneb sisendite vaheline
pinge, mitteinventeeriva sisendi pinge pääseb nüüd maksumusele
ning toob kaasa väljund pinge suurenemise. See toime on samaväärne
väljund takistuse vähenemisega. Mitteinventeeriva võimendi
väljundtakistus ongi reaalselt mõne
ringis , seega 100 korda väiksem kui Op võimendi takistus.
Väljundtakistuse vähenemine on seda tugevam, mida tugevam on
kasutatav tagasiside.
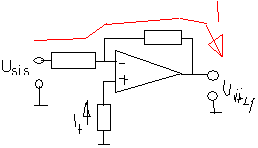
Inventeerivvõimendi:Inventeerivalvõimendil antakse
sisend signaal läbi takistuse R1 inventeerivasse sisendisse ja
sellesse
samasse sisendisse tuuakse väljundist takistusega R2
tagasiside pinge. See tagsiside on negatiivne, sest ta toimib
inventeerivas sisendis. Kuna Op võimendi püüab alati omandada
olekut, kus sisendite vaheline pinge on 0 ja kuna inventeerival
võimendil on mitteinventeeriv sisend maandatud, siis tekkib
inventeerivas sisendis
virtuaalne maa, see tähendab selle sisendi
pinge maa suhtes on peaaegu 0.
Inventeeriva
võimendi sisend takistus on määratud takistuse R1 valikuga, sest
kuna inventeriva sisendi
potensiaal on võrdne maaga, siis määrab
sisend voolu ja seetõttu ka sisendtakisutse just sisendi ja
inventeeriva
klemmi vaheline takistus, see on R1. Inventeeriva
võimendi väljund takistus on suurem, kui Op võimendil. Sest kui me
koormame taolise võimendi väljundit, siis toob see kaasa väljund
pinge vähenemise, väheneb ka sisendpinge, väljund pinge ei
suurene, sest miski teda ei kompenseeri ja seega ongi väljund
takistus Op võimendi takistusest suurem.
Kui
kasutada elementaarset võimendit siis võib tekkida tema toimes
sisend vooludest toime viga, sest sisend
voolud -I kulgeb sisendisse
läbi takistuse +I aga otse maast. See tekkitab sisend pingete
erinevuse. Selle nähtuse likvideerimiseks lisatakse
mitteinventeerivasse sisendisse takistus mille väärtus võetakse
võrdseks inventeeriva sisendi ja maa vahelise takisusega, ning kui
lisada see takistus, siis tekkib sisendites olevatel takistustel
võrdne pingelang ja eelnimetatud probleemi ei teki.
Op
võimendi sagedus karakteristika: Op
võimendi sagedus karakteristikast sõltuvad tema baasil koostatud
võimendite sagedus omadused. Seejuures ilma tagsisideta Op võimendi
on väga suure võimendus
teguriga ja ta võib väga kergesti minna
genereerima .
Automaatreguleerimis süsteemides kaob selliseljuhul
süsteemi stabiilsus ja ta lakkab töötamast. Seega on
korigeerimatta Op võimendi mitte stabiilne. Stabiilsuse
saavutamiseks lisatakse Op võimendile väljast poolt kas mõned
kondensaatorid või Rc ahel. Nende korrigeerimis elementide vajadus
ja väärtused antakse Op võimendite kataloogis ehk juhendis.
Uuematel Op võimenditel (osad) vajadus väliskorigeerimis elementide
järgi puudub, sest nad on neile sisse ehitatud. Nende toimel muutub
sagedus karakteristika kuju, täpsemalt tema
kalde nurk tema
kaldenurk 0
joonega . Seejuures selle karakteristika
paiknemine teljestikus sõltub Op võimendi kui elemendi transiit sagedusest ja
võimendu tegurist. Kui me kasutame mingit Op võimendit, siis me
lisame talle tagasiside ahela, millega määratakse võimendus tegur.
Sellega on määratud võimendi reaalne ülemine sageduspiir, mille
puhul tekkib võimenduse langus –3 Db.
Kui me
suurendame tgasiside ahela muutmisega võimendus tegurit, siis nihkub
võimendi ülemine sagedus piir madalamatele sagedustele. Juhul kui
saadud ülemisest sagedus
piirist ei piisa tuleb võtta kasutusele
suurema transiitsagedusega Op võimendi.
Op
võimendite rakendusi:Oma
nimetuse on Op võimendi saanud esmasest kasutus valdkonnast. Sest
tema abil on võimalik teostada elektriliselt matemaatilisi
operatsioone, see tähendab liitmist, lahutamist, difenseerimist,
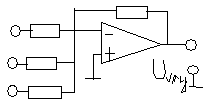
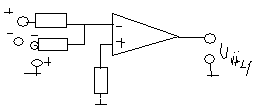
integreerimist. Sumeeriva lülituse baas lülituseks on inventeeriv
lüliti.
Kui
takistused R1-R3 on võrdsed, siis toimub pingete liitmised
ühesugusest mastaabist.
Automaatikas on vaja aga sageli
liita erineva tähtsusega signaale.Taolist erinevate tegurite toime
liitmist
erinevas mastaabis saab teha kui valida sisendite takistused
vastavas suhtes. Nii et õhukulumeetri signaal mõjutab väljundit
kõige enam ja õhu temperatuuri
andur kõige vähem. Op võimendi
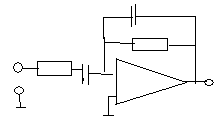
baasil on võimalik luua mitme erineva otstarbega võimendeid, kui
tagasiside ahelaga kujundada nõutav sagedus karakterisitka kuju:
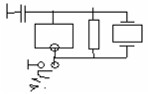
Nii
näiteks on helisagedus võimendi vajaliks sagedus karakteristika Op
võimendi sageduskarakteristikast väiksema võimendusega ja kitsama
sagedus ribaga,
kusjuures sagedusriba laius on piiratud nii alt kui
ülevalt. Alumine sagedus piir määratakse sisendisse ühendatud
RC-ahelaga R1, C1, mis ei lase läbi alalispinge signaali, ning
alumise sagedus piiri määrab kondensaatori mahtuvustakistuse ja
takisti R1 suhe. Võimendus teguri keskmistel astmel määrab
tagasiside ahel see on R1 ja R2 suhe, ülemise sagedus piiri määrab
aga tagasiside ahelas olev
kondensaator C2, sest kõrgematel
sagedustel tugevneb negatiivne tagasiside läbi selle kondensaatori
põhjustades vajaliku sagedus karakteristika languse koos ülemise
sagedus piiri määramisega. Tagasiside ahelasse võib kujundada ka
keerulisemaid sagedus filtreid nii et sagedus karakteristika saab
määrata küllalt täpselt selle tagasiside ahela abil.
Taolisi lülitusi nimetatakse aktiivfiltriteks, sest nad sisaldavad ka
võimendit.
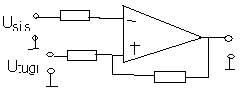
Komparaator :
Komparaatoriks
nimetatakse lülitust mis
teostab pingete võrdlemist, seega on
komparaatoril alati kaks sisendit. Üks on niinimetatud tugipinge
sisend, kuhu antakse see pinge mille suhtes sisend pinget võrreldakse
ja teine võrdluspinge sisend, kuhu antakse see muutuv pinge mida me
soovime etteantud tugipingega võrrelda. Pingete võrdsuse
saavutamisel tekkib väljund signaalis hüppe või formeeritakse
väljund
impulss . Kuna Op võimendil on kaks
vastand toimega
sisendit, siis saab teda väga lihtsalt panna
toimima komparaatorina.
Kui tugi pinge on sisend
pingest suurem ja ta on ühendatud mitte
inventeerivasse sisendisse, siis pääseb maksvusele mitte
inventeeriva sisendi toime ja väljund pinge läheb positiivsesse
küllastusse, kus väljund signaal on praktiliselt võrdne positiivse
toite pingega. Kui sisend pinge ületab tugi pinge ajahetkel t1 siis
pääseb maksvusele inventeeriva sisendi toime, ning väljund pinge
läheb negatiivsesse küllastusse (saab võrdseks negatiivse toite
pingega). On võimalik võrrelda ka erineva polaarsusega pingeid:
Sel
juhul antakse eripolaarsusega sisend ja tugipinge läbi takistuste
samasse sisendisse. Kui tugi pinge on sisend pinges suurem, siis
määrab võimendi oleku tugi pinge ja kuna inventeerivasse
sisendisse antakse sel juhul negatiivne pinge, siis läheb väljund
positiivsesse küllastusse (+E). Kui aga sisend pinge ületab
tugipinge, siis saab inventeeriva sisendi pinge
positiivseks ja
väljund läheb negatiisesse küllastusse. Vaadeldud komparaatorid on
niinimetatud hüstereesi vabad komparaatorid, see tähendab, et nende
rakendumis ja tagastumis pinged on võrdsed. Automaatikas esineb
sageli
olukordi kus anduri signaal kõigub mingi väärtuse ümber,
sellisel juhul
tekkivad korduvad komparaatori rakendumised ja
tagastumised. Ja kui
taoliselt hüplev väljund signaal anda
loogikasse, siis võib see ajada
loogika töö
segamini . Kui sisend
signaal on kõikuva
iseloomuga , siis sobib kasutada hüstereesiga
komparaatorit, kus rakendumis ja tagastumis pinged on mõnevõrra
erinevad. Hüsterees saadakse kui viia sisse tagasiside.
Rakendumis
ja tagastumis pingete erinevused tekkivad seetõttu, et
mitteinventeeriva sisendi pinge ei ole määratud ainult tugi
pingega, vaid sinna liitub veel mingi osa väljund pingest läbi
takistuse R3. Kui väljund on positiivses küllastuses siis muutub
mitteinventeeriva sisendi pinge tugi pingest veidi positiivsemaks,
ning rakendumis pinge on tugipingest suurem. Negatiivse väljund
pinge korral aga tuleb väljundist mitteinventeerivasse sisendisse
väike negatiivne pinge ning tagastumispinge on seetõttu tugipingest
väiksem. Tulemusena välditakse väljundpinge “hüplemine”
sisend pingete väikeste kõikumiste korral.
Op
võimendite liigid: Tingituna sellest et Op võimendeid kasutatakse küllaltki erinevates
valdkondades esitatakse nende parameetritele erinevaid nõudeid.
Sellest tulenevalt on kujunenud erinevad Op võimendite liigid: 1.Üld
otstarbelised –
ettenähtud kasutamiseks valdkondades kus ei esitleta rangeid nõudeid
ühelegi parameetrile. Nad on odavad ja neid valmistatakse reegline 2
või 4 võimendit ühises korpuses. Tüüpilised parameetrid on:
A.Transiit
sagedus- kuni 3 MHz.
B.Nihkepinge-kuni
10mmV.
C.Toitepinge-
kuni 20V.
2.Täppis
Op võimendid-
leiavad kasutamist mõõte võimendites, eriti alalispingete
võimendamisel. Neil on suur võimendus tegur kuni 30*106
ja väike nihke pinge 10-100mikroV.
3.Lairibalised
Op võimendid- Neile
on omane suur väljund pinge kasvu kiirus. Mis ulatub kuni 6000V
mikrosekundi kohta. Kasutatakse kiirete komparaatoritena.
4.Väikese
voolu tarbe ja madala toite pingega Op võimendid-
On kavandatud kasutamiseks patarei toitega
seadmetes . Toitepinge ei
ületa kolme
volti , tarbitav vool väiksem kui 1mmA.
5.Suureväljund
pingega Op võimendid-
On kavandatud valdkondadele kus väljund pinge võib
ulatuda 500V-ni
(totitepinge +/-250V).
6.Suure
väljund vooluga Op võimendid-
Kasutatakse valdkondades, kus väljund vool võib ulatuda kuni 30 A.
Kasutatakse koos radiaatoritega.
Generaator Generaatoriks
nimetatakse lülitusi mis tekitavad meile soovitava sagedusega
elektrilisi võnkumisi. Jagunevad: A.sinuspinge generaatoriteks.
B.mitte sinuspinge generaatoriteks. Sinuspinge generaatoreid on kolme
liiki: 1.)Rc
generaatorid .2.)Lc generaatorid. 3).Kvartsgeneraatorid.
Kõik
generaatorid on positiivse
tagasisidega lülitused kusjuures
sinusgeneraatoritel nimetatud vajalik ülekriitiline tagasiside
tekitatakse ainult ühele sagedusele, mis on generaatori töö
sageduseks.
Rc-
generaatori tagastakse genereerimiseks nõutav positiivne tagasiside
takistustest ja kondensaatoritest koostatud filtri abil. Lc-
generaatoris tagatakse see võnke ringi kasutamisega, mille
resonants sagedus määrab generaatori võnke sageduse.
Kvarts generaatoris
määratakse võnke sagedus sobiva kvarts resonaatori kasutamisega,
mis toimib kõrge kvaliteedilise võnkeringina. Rc generaatorit
kasutatakse madalatel sagedustel – 100KHz. Lc generaatoreid
kõrgematel sagedustel üle 100KHz. Ja kvartsgeneraatoreid kõikidel
sagedustel, juhul kui on olulise tähtsusega genereeritava sageduse
stabiilsus.
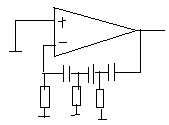
RC
generaatorid:Kõige
lihtsam on koostada rc generaatorit Op võimendi baasil. võimendist
generaatori saamiseks on vaja niinimetatud tagasiside, mis toimib
vaid ühel sagedusel, ning sellel sagedusel tekkivadgi võnkumised.
Kondest ja takistusest koosnev RC-lüli pöörab signaali faasi,
sõltuvalt signaali sagedusest 0-90 kraadi. Kolm lüli 0-270 kraadi.
Järelikult leidub mingi sagedus millele kolm RC-lüli tekkitavad
faasi nihke 180 kraadi ja kui tagasiside ahelas 180 kraadi võrra
nihutatud signaal anda inventeerivasse sisendisse, siis tekkib sellel
sagedusel positiivne tagasiside ja lülitus läheb genereerima.
Pingestades loodud lülituse tekkib Op võimendis vool ja väljundisse
tekkib müra signaal, mis kujutab endast korrapäratuid pinge
kõikumisi. Taolise korrapäratud signaali
spekter sisaldab kõik
võimalikke harmoonilisi, see tähendab erineva sagedusega komponente
ning nende hulgas on ka see sagedus millele on tekkitatud positiivne
tagasiside. Tänu positiivsele tagasisidele võimendatakse seda
sagedust enam ning tulemusena tekkibgi väljundis selle sagedusega
signaal. Võnke signaal sõltub RC-ahela väärtusest:
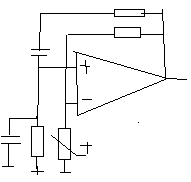
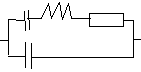
On
ka teine RC-generaatori lülitus, mida nimetatakse Viini silliaga
lülituseks. Selektiivne tagasiside tekitatakse siin ahelaga R1-C1,
R2-C2. Taolisele lülitusele on iseloomulik et teatud sagedusel on
selle ahela faasi nihe null ja kui anda see signaal mitte
inventeerivale sisendile, siis tekkib positiivne tagasiside.
Lülituses on ka teine tagasiside ahel, mis on negatiivne tagasiside
ja mis on mittelineaarne. See toimib inventeerivas sisendis ja tema
ülesandeks on stabiliseerida genereeritavaid võnkumisi.
Stabiliseerivaks
elemendiks on takistusena R4 lülitatud
posistor ,
mis peab olema valitud
selliselt , et ta kuumeneb sobivalt teda läbiva
voolu toimel. Kui mingil põhjusel väljund signaal suureneb, siis
suureneb ka tagasiside ahelas R3, R4 vool. Voolu suurenemise tõttu
tõuseb posistor temperatuur ja tema takistus väheneb. R4 takistuse
vähenemise tõttu tugevneb tagasiside pinge. Seetähendab suureneb
inventeerivasse sisendisse antav pinge. Kui aga tugevneb negatiivne
tagasiside, siis väheneb võimendi võimendus tegur, ning ka väljund
pinge.
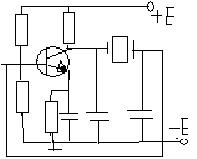
LC-generaatorid:LC-generaator
kujutab endast võimendus astet, mille koormuseks kollektor ahelas on
võnkering. Lisaks sellele on selles võimendus
astmes tekkitatud
positiivne tagasiside. Tagasiside võib olla tekitatud erinevalt ja
sõltuvalt tagasiside teostamise viisist on mitmeid LC-genraatori
lülitusi. Vaadeldavas lülituses on tagasiside teostatud
transformatoorselt nii, et võnkeringi induktiivsuse südamikule on
keritud ka sidestusmähis Ls.
kuna võimendus aste pöörab signaali faasi 180 kraadi, siis
positiivse tagasiside saamiseks peab olema tagasiside pinge
väljundpingega vastas faasis. Seetähendab tagasiside mähiseotsad
peavad olema õigesti valitud. Tuleb kasutada ka
sidestuskondensaatorit, sest muidu lühistuks baas sidestusmähise
kaudu ja rikneks astme tööpunkti fikseerimine. Lülituse
pingestamisel tekkivad võnkeringis sumbuvad võnkumised sagedusega,
mis on määratud võnkeringi elementidega.
Tavaliselt
on need võnkumised kustuva iseloomuga, kui kuna toimib positiivne
tagasiside siis hakkavad transistoris tekkivad voolu muutused nendele
kaasa
aitama , ning võnkumised muutuvad püsivateks. Generaatori
tööpunkt valitakse mõnevõrra teisiti kui võimendis, sest
tingituna võnkeringi kasutamisest ei pea kollektor vool järgima
võnkeringi võnkumisi ja
piisab kui võnkeringi võnkumistele kaasa
aidata kollektor voolu impulssidega. Seetähendab tööpunkt võib
olla valitud küllalt madalale sarnaselt vastastakt lülitusele.
Kvartsgeneraatorid:
Kvartsgeneraatorites kasutatakse kvartsresonaatoreid, mis on üks
pieso efektiga
kristallide liike. Pieso efekt on teatud liiki
kristallide omadus, mis seisneb selles, et kui kristallile teatud
sihis avaldada mehaanilist
survet , nii et see tekktiab müningast
deformatsiooni, siis kristalli tahkude vahel tekkib
elektromotoorjõud, mis on võrdeline toimiva rõhuga. Esineb ka
pöördefekt, see tähendab kui rakendada pieso kristallile pinge,
siis kaasneb tema mõõtmete muutmine. Ja kui rakendada vahelduv
pinge siis tekkib kristalli võnkumine. Seejuures esinevad ka
resonantsi nähtused, mille sagedus sõltub kvartskristalli
mõõtmetest.
Kvartskristallile on iseloomulik see, et resonants
sagedus on temperatuurist praktiliselt sõltumatu. Ja seda omadust
kasutataksegi siis kui on vaja generaatoritel väga täpseid ja
stabiilseid sagedusi. Valmistatakse väga suures standariseeritud
sagedustega valikus kvartsresonaatoreid. Elektrilises mõttes on
kvarstkristall vaadeldav võnkeringina, täpsemalt järjestik
võnkeringina. Kuid sellel lisandub veel kristalli elektroodida
mahtuvus .
Toodud
aseskeemilt on näha, et on võimalik kaks võnkeringi: järjestik
võnkering- mille annab
kristall , ja
paraleel võnkering mis moodustub dioodi ja
kvartsi induktiivsusega. Ja kui
määrata kvarts resonaatori resonants kõverad, siis ilmnebgi seal
kaks resonantsi. Madalamal sagedusel ilmneb paraleel resonants ja
kõrgemal järjestik resonants. Nende resonants sageduste erinevus ei
ole suur.
Kuna
kvartskristalli tuleb vaadelda võnkeringina, siis saab kasutada
LC-generaatori lülitusi, kus võnkering on asendatud kvartsiga.
Seejuures võib kasutada nii järjestik kui paraleel resonantsi.
Võnkeringi (ka kvartsi) võib lülitada ka tagasiside ahelasse,
seljuhul tekkib selektiivne tagasiside. Mis toimib ainult resonants
sagedusel. Tagasiside ahelas peab
tekkima seljuhul 180 kraadi
faasinihe ja vaadeldavas lülituses tekkib see C1 ja C2 kaasabil ja
selline olukord tekkib natuke järjestik resonantsist kõrgemal
resonantsil, kus kvarts toimib induktiivsusena. Nimetatud sagedusel
lähebgi lülitus võnkuma. Tekkiv genereerimis sagedus on täpselt
valitav kondensaatorite C1 ja C2 valikuga, seejuures võnkesagedus on
paraleel ja järjestik resonants sagedustest kõrgemal. Väga
lihtsalt võib saada kvartsgeneraatori kasutades kvartsi ja loogika
elemente. Seejuures lihtsaima lülituse korral sobib kasutada
CMOS loogikat, kuna CMOS loogika sisend takistus on kõrge.
Invertor
on põhimõtteliselt võimendus aste ja vaadeldaval juhul ongi see EI
element pandud tööle võimendus
astmena . Sel teel et takisti R1
valikuga on
viidud lüli töö
reziim nulli ja ühe vahele, kus ta
käitubgi võimendus astmena. Tagasiside ahel on sarnane eelmise
lülitusega, ning tema generaatori võnke sagedus on järjestik
resonants sagedusest veidi kõrgemal, kus induktiivsusena toimiv
kvarts moodustab kondensaatoriga C1 võnkeringi.
Impulss
tehnika alused
Impulss tehnikaks nimetatakse seda
elektroonika osa, mis tegeleb
impulsiliste signaalide genereerimise, formeerimise ja
võimendamisega. Impulsilisi signalle kasutatakse digitaal tehnikas,
ning ka signaalide edastamisel, kui sinuselist signaali
iseloomustatakse kolme parameetriga, need on : Amplituud, Sagedus
,
Algfaas Siis
impulsiliste signaalide korral on vajalikke parameetreid märksa
rohkem. Seejuures loetakse
impulsiks lühiajalist pinge, voolu või
võimsuse kõrvalekandumist mingist teatud
suurusest .
Impulsikuju:See
on pinge, voolu või võimsuse muutumise seaduspärasus impulsi
vältel. Periood
on
ajavahemik ühe impulsi algusest kuni teise samapolaarse
impulsi
alguseni . Impulsi kestvus on ajavahemik impulsi algusest kuni
tema lõppemiseni. Pausi kestvus on ajavahemik impulsi lõppemisest
kuni järgmise impulsi alguseni. Väga sageli on impulsside kuju
moonutunud ja seljuhul võib tekkida probleeme impulsi
kestvuse määramisel. Kokkuleppeliselt kui on tegemist moonutatud
impulsidega, siis määratakse impulsi kestvus tasemel 0,1. Ja juhul
kui on tegemiste ebamäärase kujuga impulssidega siis tasemel 0,5
mida nimetatakse impulsi kestvuseks pool kõrgusel.
Harvendus : F=T/ti Täitetegur:Kt=1/F Sagedus: Ehk perioodi pöördväärtus.
Impulsi
polaarsus : Impulsi
polaarsus on pinge, voolu või võimsuse muutumise suund impulsi
kestel. Kahe
polaarsete impulsside korral korduvad positiivsed ja
negatiivsed
impulsid kindla seaduspärasusega. Elektriahelat
läbimisel impulside kuju sageli moonutub. Ja see
moonutus avaldub
kahel kujul: Impulsside külgmiste osade välja venimises, mille
tulemusel ristküllik impulsid muutuvad sarnaseks
trapets impulsidega
ja impulsi horisondi languses. Mis avaldub horisontaalse osa
lineaarses langemises. Kuna impulss pinged on mitte sinuselised, siis
võib vaadelda neid ka
koosnevana harmoonilistest, see on erineva
sagedusega
sinus komponentidest. Millele on liituud ka mingi
alalispinge, mida nimetatakse
alalis komponendiks ja mis on määratud
impulside keskväärtusega.
Üld reeglina mida
kõrgem on harmoonilise number seda väiksem on tema amplituud ja
seda vähem mõjutab impulsilise signaali kuju. Ideaalsel juhul peaks
elektriahelate läbilaske riba olema lõpmata lai, seljuhul kanduksid
sisendist väljundisse moonutusteta kõik
harmoonilised . Reaalselt
see nii ei ole ja see tõttu tekkivad ka impulsside moonutused.
Praktiliselt ei ole aga vajagi ideaalseid impulsse ja seetõttu
piisab kui signaal sisaldab esimesed kümme harmoonilist.



















Kõik kommentaarid