Mehaaniline liikumine
Taustsüsteem.
Koordinaadid.
Raadiusvektor. Tehted vektoritega.
Liikumisvõrrand. Trajektoor . Kulg- ja pöördliikumine
. Nihe ja teepikkus . Nurknihe. Ainepunkt -mõnikord
võib liikumise uurimisel jätta kehade mõõtmed arvestamata: siis
kui need on palju väiksemad kõikidest teistest mõõtmetest,
millega antud ülesandes on tegemist. Ainepunkti asukoha ruumis saab
määrata raadiusvektori
r
abil. Punkti liikumisel muutub
vektor r
üldjuhul nii suuruse kui ka suuna poolest.
Taustsüsteem-
taustkeha , sellega seotud
koordinaadistik ja aja arvestamise alghetk
mood. taustsüsteemi.
Koordinaadid
– Keha koordinaadid võimaldavad
määrata tema asukohta ruumis. Liikumise kirjeldamisel tuleb
arvestada ka aega.
Raadiusvektor-
Punkti raadiusvektoriks nimetat. koordinaatide alguspunktist antud
punkti tõmmatud
vektorit . Raadiusvektor
r
määrab üheselt punkti asukoha ruumis.
Vektoriks
nim. sellest liiki suurust nagu nihe, s. o. suurus, mida iseloomustab
arvväärtus ja suund ning mille liitmist teostatakse näidatud
reegli järgi.
Vektorite
hulka kuuluvad kiirus, jõud ning mitmed teised suurused. Vektori
määrab ära suurus ⊕
a®,
suund a®
ja rakenduspunkt €
a®.
Vektori
moodul on alati positiivne
skalaar . Vektori
kirjeldamine:
vektoreid , mis on suunatud mööda paralleelseid sirgeid (samas või
vastupidises ), nim. kollineaarseteks.
Vektoreid, mis on paralleelsed ühe ja sama tasapinnaga, nim.
komplanaarseteks.
Samasuunalisi võrdsete moodulitega kollineaarseid vektoreid nim.
võrdseteks.
Vektorite liitmine .
Olgu antud kaks vektorit A ja B(joon.2). Resul-tantvektori C
saamiseks viime vektori B paralleelselt iseenesega edasi nii, et tema
alguspunkt ühtiks vektori A lõpuga (joon.3.). Sum-mat võib esitada
kujul
C =
A + BVektorite
lahutamine.
Kahe vektori A ja B
vaheks A-B nim. vektorit C, mis, liidetuna
vektooriga B, annab vektori A (joon.4). Kuna vahe A-B esitub kujul
A
- B = A + ( -B ),
siis saame vektori
C
= A – B,
kui liidame vektoriga A vektori, mis on võrdvastupidine vektoriga B.
Vektorite
lahutamine komponentideks.
Iga vektori A võib asendada mitme vektoriga A1,
A2
jne., mille summa annab vektori A. (joon.5.).
Vektori projektsioon teljel.
Vektori projektsioon on skalaar. Kui suund punktis 1` punkti 2` ühtib
suunaga n , loetakse projektsioon positiivseks, vastasel juhul on
projektsioon negatiivne (joon.6.)
Tähistatakse:
vektori A projektsiooni suunal n tähistatakse An.
Ühikvektor.
Igale vektorile A võib seada vastavusse ühikvektori Aühik , mille suund ühtib vektori A suunaga ning moodul on võrdne ühega.
Vektorite skalaarkorrutis . Töö
avaldise võib esitada jõuvektori ja nihkevektori
skalaarkorrutisena. Kahe vektori A ja B skalarkorruti-seks nim.
skalaari, mis on võrdne nende vektorite moodulite ja nen-devahelise
nurga a
koosinuse korrutisega.
Vektorkorrutis .
a®*b®=
c®
, I a®l
* l b®l
* sin a
= l c®l,
a=
a®Ù
b®
Liikumisvõrrand-
r = t(t)- kohasõltuvus ajast. a = dv / d t = Dv
/ Dt
= =v2-v1
/ Dt,
kui a =
const , v2 = v1+at ê*d
t , v2 d t
=
v1dt + at * dt. Liikumisvõrrand kirjeldab keha koordinaadi muutust
ajaühikus valemi näol (x=20+23t; x=t-10t2)
Oletame
lihtsuse mõttes, et kiirendus ( ⃗)
on konstantne. Kuna kiirendus on kiiruse muutumise kiirus ajas, siis
kehtivad seo-sed: ⃗
⃗ ⃗ ⃗ ⃗∫ ⃗ ⃗ ⃗
kus
on integreerimiskonstant, mis on
ilmutatud algtingimustest, võttes
aja hetke nulliks. Kuna kiirus on asukoha muutu-
mise kiirus ajas,
siis kehtivad seosed: ⃗
⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗
Integreerides
viimast võrrandit, saame: ∫
⃗ ⃗ ∫ ⃗∫ ⃗ ⃗ ⃗ ⃗
Trajektoor-on
koguliikumise teepikkus. Läbitakse kõik trajektoori punktid. Joont,
mida mööda keha punkt liigub nim. trajektooriks.
Kulg
– ja pöördliikumine –
Kulgliikumisel mingi suvaline
kehaga seotud sirge jääb iseendaga
paralleelseks. Pöördliikumisel liiguvad keha kõik punktid mööda
ringjooni ning nende ringjoonte tsentrid asuvad ühel ja samal
sirgel, mida nim. pöörlemisteljeks (võib olla ka väljaspool keha)
Teepikkus-
on pikki trajektoori. Läbitud tee pikkus.
Nihe-
vektoriaalne suurus.
Nihkevektor on suunatud sirglõik, mis ühendab liikumise
lähtepunk-ti lõpppunktiga . Keha alguskohta lõppasukohaga
ühendavat vektorit nim. nihkeks.
Ainepunkti kiirus
ja kiirendus
Kiiruse
definitsioon.
Kiirus trajektoori mingis
punktis. Nurkkiirus .
Joon- ja nurkkiiruse vaheline seos. Periood. Sagedus. Kiirenduse
mõiste.
Nurkkiirendus .
Kiirendus kõverjoonelisel liikumisel (
normaal-
ja tangentsiaalkiirendus ). Teepikkuse
arvutus kiiruse ja kiirenduse kaudu.
Hetkkiirus (Kiirus
trajektoori mingis punktis)-keha
kiirus teatud ajahetkel. Hetkkiirus muudab kiirust, suunda ja
rakenduspunkti.
Keskmine
kiirus- nim. kogu läbitud
teepikkuse ja selleks kulutatud kogu aja jaotist.
Nurkkiirus-
vektorilist kiirust w = lim Dt®0
Dj/Dt
= dj/dt
(Dt
on aeg, mille kestel
sooritatakse pööre Dj)
nimet. keha pöörlemise nurkkiiruseks.
Liikumiste
sõltumatuse printsiip-kehtib
liitliikumise puhul, mis on saadud kolme koordinaattelje sihis
toimuva sirgliikumise
liitmise tulemusena,
kusjuures liidetavad
liikumised ( ja kiirused) on ükstei-sest sõltumatud (joon.10).
Kiirendus-
nimet. kiiruse muutumise kiirust.
Normaalkiirendus -
ristiolekut trajektooriga nim. normaalseks ja seda näitab ühikvektor
n®
, seega normaalkiirenduse suurus
arvutub: an=
=v2/r.
Normaalkiirendus kirjeldab kiiruse suuna muutumise kiirust.
Tangensiaalkiirendus-
kui kiiruse suurus kasvab (dv/dt on pos.), siis
wt
on liikumisega samasuunaline, kui
aga kiirus suuruse poolest ka-haneb (dv/dt on neg.) , on
wt
liikumisega vastassuunaline. Vektorit
wt
nim. tangensiaalkiirenduseks ja
ta isel. kiiruse suuruse muutu-mist. Kui kiiruse suurus ei muutu, on
tangensiaalkiirendus null ning
w =
wt. at
= dv/dt = d(wR)/dt = R *dw/dt
Nurkkiirendus-
saagu vektor w
ajavahemikus Dt
juurdekasvu Dw.
Nurkkiiruse vektori muutumist ajas iseloomustab suurus b=limDt®0Dw/Dt
= dw/d
t, mida nim. nurkkiirenduseks. Vektor b,
samuti kui w,
on aksiaalvekt.
Kogukiirendus-
a®
= at®
+ an®
Pöördenurk-
ümber mingi telje 00 pöörleva absoluutselt jäiga keha kõik
punktid liiguvad mööda ringjooni, mille tsentrid asuvad
pöörlemisteljel. Iga punkti raadiusvektor pöördub ajavahemiku Dt
kestel ühesuguse nurga Dj
võrra, mis on kogu jäiga keha pöördenurgaks.
Joonkiiruse ja nurkkiiruse vektorite vaheline kiirus.
Joonkiirus näitab ajaühikus läbitavat kaarepikkust, nurkkiirus-
ajaühikus
Relativistlik
kinemaatika
Galilei
relatiivsusprintsiip.
Erirelatiivsusteooria postulaadid. Lorentzi
teisendused . Sündmuste
samaegsus. Pikkuse ja ajavahemiku
suhtelisus .
Intervall . Kiiruste
liitmine relativistlikul juhul.
Galilei
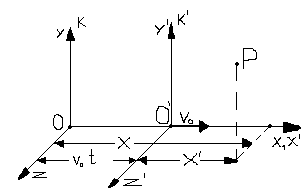
teisendused, relatiivsusprintsiip mehaanikas .. Vaatleme kahte taustsüsteemi, mis liiguvad teineteise suhtes jääva
kiiru-sega v0.
Loeme ühe
nendest tinglikult liikumatuks . Siis teine süs. K´
liigub ühtlaselt ja sirgjooneliselt. Valime süs. K koordinaatteljed
x,y,z ja süst. K´ teljed x´, y´, z´ nii, et teljed x ja x´
ühtiksid, teljed y ja y´ ning z ja z´ oleksid paralleelsed.
Leiame
nüüd seose mingi punkti P koordinaatide x, y, z ning sama punkti
koordinaatide x´,y´,z´ vahel. Kui hakata aega lugema hetkest, mil
mõlema süs. koordinaattelgede alguspunktid ühtisid, siis, nagu
selgub jooniselt, x =x´ + v0t.
Peale selle on ilmne, et y=y´ ning z=z´. Lisanud nendele seostele
klassikalises meh. tunnustatud eelduse, et aeg kulgeb mõlemas süs
ühtemoodi, s.o. t = t´, saame neljast võrrandist
koosneva süsteemi: x=x´ + v0t´, y=y´, z=z´, t=t´ }, mida nimetatakse Galilei teisendusteks.
Relatiivsusprintsiip- Väide, et kõik meh.nähtused kulgevad
erinevates inertsiaalsetes taustsüstee-mides ühtemoodi, mistõttu
meh.katsete abil pole võimalik kindlaks teha, kas
antus taustsüs.
on paigal või liigub ühtlaselt ja sirgjooneli-selt.
Ainepunkti
dünaamika
Dünaamika
põhimõisted. Fundamentaaljõud. Inertne ja raske mass. Massi
sõltuvus kiirusest.
Impulss .
Dünaamika
põhiseadused (Newtoni I, II ja III seadus). Keha
raskus ja kaal. Impulsi jäävuse seadus.
Reaktiivliikumine .
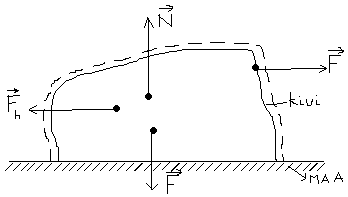
Raskusjõud
on kehale mojuv
joud , mis on
pohjustatud peamiselt gravitatsioonijoust ja tsentrifugaaljoust. Keha
kaal
on joud,millega keha mojutab
alust voi riputusvahendit. Kui keha kukub ilma toeta, siis on ta
kaaluta
olekus. Fkaal=m(g+-a).
Ülekoormuse
korral keha kaal suureneb,
Fkaal=m(g+a).
Mis
vahe on kaalul ja raskusjõul. Mis on kaaluta olek ja ülekoormus?
Andke valemid. Raskusjõud on kehale mõjuv jõud, mis on
põhjustatud peamiselt gravitatsioonijõust ja tsentrifugaaljõust.
Keha kaal aga on jõud, millega keha mõjutab alust või
riputusvahendit. Kaaluta olek on ilma toeta kukkumine. Ülekoormus
tekib kui tugi liigub
kiirendusega . 𝐹𝑟=𝑚⋅𝑔;
𝑇+𝑚⋅𝑔=𝑚⋅𝑎; 𝑃=𝑚(𝑔±𝑎)
Newtoni
I seadus, mass, jõud. Def: Iga
keha säilitab oma
liiku -misoleku seni, kui teised kehad ei
sunni seda olekut muutma. See tähendab, et see kehtib vaid vaba keha
korral. NB! Seadus ei kehti mitte igas taustsüs. vaid inertsiaal
taustsüsteemides. N. seadused ongi inertsiaalse taustsüst.
kontrollimiseks. MASS – on füüsikaline suurus, millega
mõõdetakse kehade inertsust, nim. massiks. Inertsi-mõõt ja
gravitatsiooni välja allikas inertne mass on võrdne gravitats.
massiga. [m]si
= 1kg ( ainuke ühik, mida ei saa taastada). Mass sõl-tub ka
kiirusest (A. Einstein) m = mo/Ö1-v2/c2 (c = 3*108
m/s valguse kiirus). JÕUD – on ühe keha mõju teisele, mille
tulemus. muutuvad kehade liikumisolekud või/ja nad deformeeruvad.
Sni=1
Fi®
= 0 Þ
v®
Jõud
on võrdeline ajaühikus toimuva
liikumishulga muutusega.
N.
II seadus Def: punktmassi impulsi
muutumise kiirus (
tuletis aja järgi) on suuruselt ja suunalt võrdne
punktmassile mõjuva jõuga. Jääva massi korral võrdub massi ja
kiirenduse korrutis jõuga. a®
= SFi®/m või F®
= m*a®
.
§14.N.
III seadus. Jõud millega kaks keha
teineteist mõjutavad on suuruselt võrdsed ja suunalt vastupidised
ja on rakendatud erike-hadele. F1®=
-F2® F1®¯
F2® 1)Jõud esinevad alati paarikaupa 2)Pole oluline , mis tüüpi
jõududega on tegemist.
Impulsi
jäävuse seadus.
Seadus: Isoleeritud süsteemi impuls on jääv:m1v1®+m2v2®=m1u1®+m2u2®.
Impulsi jäävuse seaduse sisu : p®=mv®
meh. süsteem, sisejõud –jõud, mis mõjuvad süsteemi kuu-luvate
kehade vahel, nende summa on alati 0. Välisjõud on jõud, mis on
tingitud süsteemi mittekuuluvate kehade mõjust. Isoleeritud süs.-
välisjõud ei mõju; Avatud süs.- välisjõud mõjuvad. Vaatleme
meh. süs. N-kehas, mille
massid on m1…mn
ja kiirused on v1…vn
N II s. iga keha jaoks, mis on süsteemis: d/dt(m1*
v1®)=F1´®+F®n Fn´®
kehale n mõjuv sisejõudude summa}+ d/dt(mn*vn®)=
F ´®n+F®n
F1®-kehale
1 mõjuv välisjõud.}=d/dt=( m1*
v1®+…+
mn*vn®)=
F1´®+
+F1®+
F®n+…+
F ´®n dv®/dt=0 p®=const.
Galilei
relatiivsusprintsiip - Koordinaadistik on vaataja suhtes paigal.
Koordinaadistik liigub jääva kiirusega. Kõik mehaanikanähtused
kulgevad erinevates inertsiaalsetes taustüsteemides ühtemoodi,
mistõttu mehaanikakatse abil pole võimalik kindlaks teha, kas antud
taustsüsteem seisab või liigub ühtlaselt ja sirgjooneliselt.
Erirelatiivsusteooria
postulaadid – Vaatleja peab olema konkreetses taustsüsteemis;
Maailmas puudub absoluutne aeg; Kahes punktis toimuvate sündmuste
üheaegsus on suhteline; Ruum on suhteline, see on seotud konkreetse
inertsiaalsüsteemiga; Aeg ja ruum on omavahel seotud ning
moodustavad 4mõõtmelise aegruumi, mis on omakorda seotud
taustsüsteemi liikumisega teiste taustüsteemide suhtes;
Universaalset konstanti c saab kaustada etalonina kiiruste
võrdlemisel; Kaob liikumisseaduste
universaalsus (suurte kiiruste
korral Galilei kiiruste liitmine ja Newtoni II seadus).
Lorentzi
teisendused – gamma=a/
sqrt (1-(v/c)^2); u’=u+v/(1+(u*v)/c^2)
Sündmuste
samaaegsus – Kahes punktis toimuvate sündmuste üheaegsus on
suhteline, samaaegsus kehtib vaid antud inertsiaalsüsteemis. Ühes
TS’is üheaegselt toimuvad sündmsed toimuvad teistes
taustsüsteemides eri
aegadel , kui need TS’id liiguvad antud TS’i
suhtes. Pikkuse ja ajavahemiku suhtelisus – samaaegsuse
suhtelisusest järeldub pikkuse suhtelisus (
seisvas taustsüsteemis
liikumatu varda pikkus erineb sama varda pikkusest liikuvas
taustsüsteemis).
Ajavahemik on erinev eri taustsüsteemides.
Intervall
– kahe sündmuse e. punkthetke vastastikune eraldatus ajas ja
ruumis.
Kiiruste
liitmine relativistlikul kujul – v=v1+v2/(1+(v1*v2)^c2)
Dünaamika
põhimõisted – jõud, mass, impulss, energia ja võimsus. Jõud on
kehade liikumise põhjus.
Kaudselt tema mõju kehade liikumisele,
mille väljenduseks on keha kiiruse ja/või kiiruse suuna muutus või
deformatsoonile. Kiirendus on võrdeline rakendatud jõuga ja toimub
jõu suunas. Mass on mateeria omadus, mis väljendub keha inertsis
ehk vastupanus liikumisoleku muutusele ja raskuses ehk
omaduses osaleda gravitatsioonilistes vastastikmõjudes. Keha raskus ja keha
kaal on erinevad. Mõlemad on jõud, aga erinevad rakenduspunkti
poolest. Kaal on keha mass gravitatsioonijõu kaudu mõõdetuna.
Impulss on keha liikumise hulk (p=mv). Impulsi muutus on võrdeline
jõuga ja selle mõjumise
ajaga ning toimub jõu suunas. Töö on
ühelt kehalt teisele energia ülekande viis. Energia on jääv.
Energia=kehade/väljade töövaru. Potentsiaalne ja kineetiline
energia.
Siseenergia on keha osakeste pot ja kin en. summa.
Mehaaniline energia on kin ja pot energia summa. A=Ek=f*s=m*a*s.
Võimsus on töö ajaühikus.
Fundamentaaljõud
– tugev vastastikmõju, nõrk vastastikmõju, elektromagnetiline
vastastikmõju, gravitatsiooniline vastastikmõju
Inertne
ja raske mass – Inertne mass väljendab keha inertsi e. vastu
panna
liikumisele. Raske mass väljendab keha võimet tõmmata teisi kehi
(gravitatsioonivõime).
Massi
sõltuvus kiirusest – mida suurem kiirus, seda suurem mass.
Impulss
– liikumshulk. p=mv. Impulsi jäävuse seadus: suletud süsteemi
kuuluvate kehade liikumishulkade geomeetriline summa on nende kehade
igasuguse vastasmõju korral jääv. Sul. süs. on süs, mis pole
vastastikuses mõjutuses süs.väliste
kehadega . Dünaamika
põhiseadused – Newtoni I – keha liigub ühtlaselt
sirgjooneliselt või on paigal, kui talle mõjuvate jõudude
resultant on null. Newtoni II – kehale mõjuv resultantjõud on
võrdne keha massi ja kiirenduse korrutiega. Newtoni III – 2 keha
mõjutavad end teineteist jõududega, mis on suuruselt võrdsed ja
suunalt vastupidised. Fr=0; Fr=m*a; F1=-F2
Keha
raskus ja kaal – raskus ehk omadus osaleda
gravitatsioonilistes vastastikmõjudes. Keha raskus ja keha kaal on
erinevad. Mõlemad on jõud, aga erinevad rakenduspunkti poolest.
Kaal on keha mass gravitatsioonijõu kaudu mõõdetuna
Impulsi
jäävuse seadus – kehade süsteemi impulss on jääv, kui sellele
ei mõju väliseid jõude.
Reaktiivliikumine
– Reaktiivliikumine on selline liikumine, mida
põhjustab
kehast eemale paiskuv keha osa.




















Kõik kommentaarid