SISUKORDSISSEJUHATUS 3
1.
ANDURID 4
1.1.
Induktiivandur 6
1.2.
Magnetväljaandur 9
1.3.
Optoelektroonilised andurid 13
1.4.
Mahtuvusandur 17
2.
MITTEELEKTRILISTE SUURUSTE MÕÕTMINE 20
2.1.
Temperatuur 20
2.1.1.
Termopaar 20
2.1.2.
Takistustermomeetrid 21
2.1.3.
Termistor 22
2.1.4.
NTC termistor 23
2.1.5.
PTC termistor 25
2.1.6.
KTY
andur 27
2.2.
Rõhk 29
2.3.
Jõud ning
pöördemoment 31
KOKKUVÕTE 33
KASUTATUD
MATERJALID 34
SISSEJUHATUSKäesolev aruanne annab ülevaate õppeaines „
Automaatjuhtimine ” sooritatud
labori-töödest. Lisaks katsete tulemustel kinnitust leidnud
teoreetilistele
teadmistele on aru-andesse lisatud
täiendavaid materjale
VIKO keskkonnast ning mujalt allikatest.
3
1.
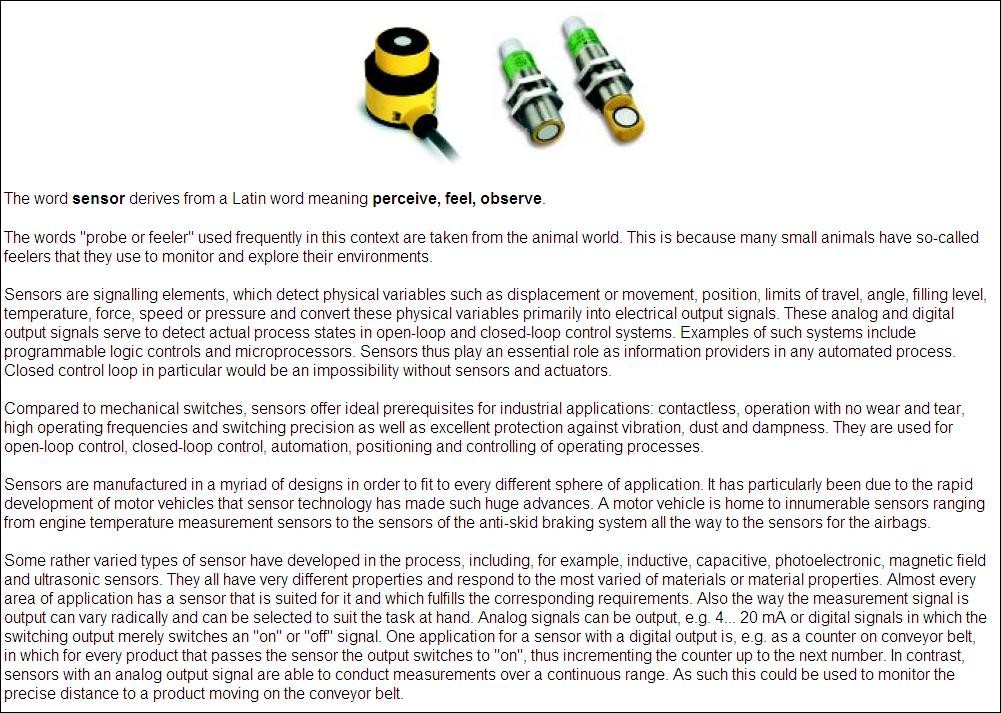
ANDURIDTootmisprotsesside
automatiseerimisel on nii automaatkontrolli, automaatjuhtimise kui ka
automaatreguleerimise ülesannete lahendamisel üheks olulisemaks
problee-miks informatsiooni saamine kontrollitava suuruse kohta.
Selleks kasutatavaid auto-maatikaelemente nimetatakse anduriteks.
Andur
on seade, mis muundab mõõdetava füüsikalise suuruse (näiteks
rõhu, kiiruse vms) teiseks suuruseks (signaaliks), mida on parem
võimendada, mõõta, edastada või töödelda.
Anduritelt
saadavad analoog -/digitaalsignaalid iseloomustavad tegelikku
protsessi olekut suletud automaatreguleerimissüsteemides, mida juhib
tööstuslik
loogika -kontroller (
PLC
ingl). Seega omavad andurid igas automatiseeritud protsessi
juhtimises info varustajana olulist rolli.
Esitatud
väljavõte andurite kohta on pärit
Lucas -Nülle tarkvarakeskkonnast
L@Bsoft.
4
Andurid
jagunevad oma ühendusviisilt kahejuhtmelisteks ning
kolmejuhtmelisteks. Kahejuhtmelised andurid lülitatakse koormusega
(elektromagnetilisereleega) jadami-si. Seepärast mõjutab neid
lahutatud olekus jääkvool (
residual current
ingl) ning su-letud olekus pingelang (
voltage drop
ingl). Kolmejuhtmelistel anduritel on peale kahe toitejuhtme veel
kolmas väljundjuhe, kuhu ühendatakse koormuse üks klemm (koor-muse
teine klemm ühendatakse toiteallikaga).
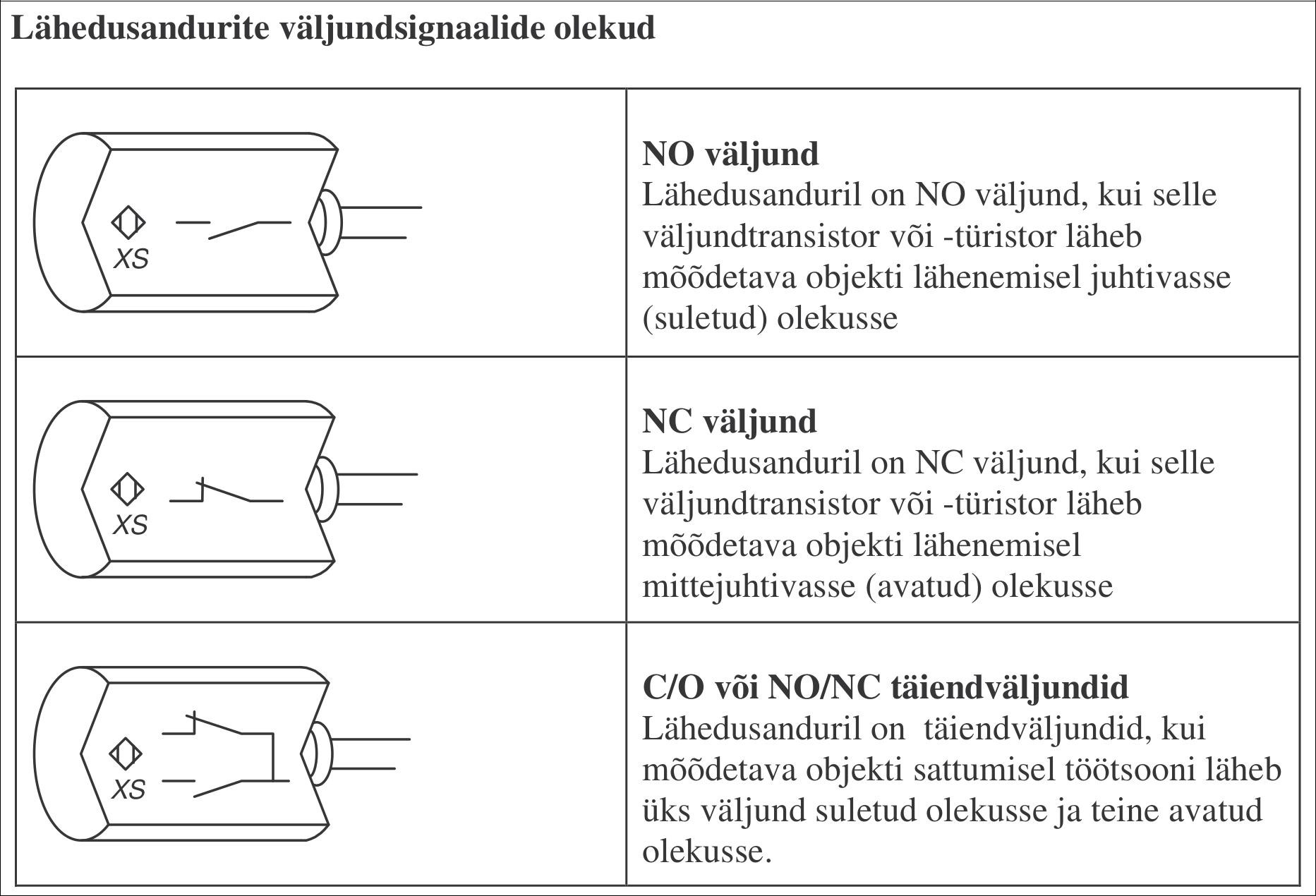
Erinevatel
anduritel võivad olla erinevad väljundsignaalid – NO või NC
kontaktid, või mõlemad. Seda asjaolu iseloomustab hästi alljärgnev
väljavõte
Tõnu Lehtla (1996) raamatust „Andurid”.
Anduritelt
saadava väärinformatsiooni saamise põhjuseid võib olla mitmeid.
Kindlasti mängib rolli anduri asend, kus peab arvestama anduri
tundlikkuse ulatusega. Kui andur väljastab analoogsignaali, võib
olla vea põhjus hoopis analoogväärtuse arvu-tustes juhtprogrammis.
Vastav lõik tarkvarakeskkonnast on esitatud järgmisel lehe-küljel.
5
1.1.
InduktiivandurEsimene
andur millega katseid sooritati, on induktiivandur.
Esmalt on
kirjeldatud induktiivse lähedusanduri tööpõhimõtet.
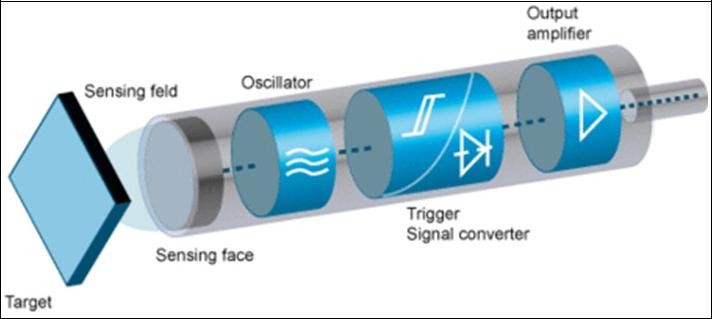
Induktiivse
lähedusanduri tajur põhineb kõrgsagedusgeneraatoril ehk
ostsillaatoril, mille töö sõltub tuvastatava objekti kaugusest.
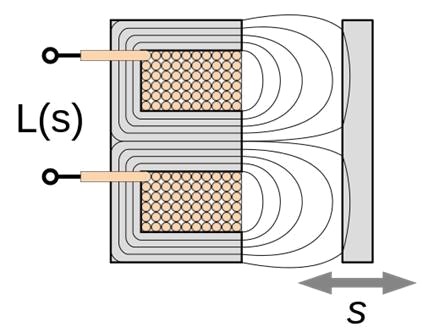
Generaatori
mähised moodustavad ta-
juri tundliku osa, mille lähedal
tekitatakse magnetväli.
Kui
metallist (elektrit juhtiv) objekt satub anduri mähiste magnetvälja
mõjupiirkonda, siis selles indutseeritud
voolud tekitavad
generaatorile lisakoormuse, mida on võimalik mõõta. Lisakoormuse
tõttu võib võnkumiste genereerimine katkeda ning rakendub
signaalimuunduri juhtlülitus (relee- või loogikalülitus).
Vastavalt vajadusele väljastatakse kas loogiline "0" või
loogiline "1" signaal, mis vastavad normaalselt la-hutatud
(N/O) või normaalselt suletud (N/C) kontaktidele.
Induktiivanduri
magnetvälja iseloomustav joonis asub järgmisel leheküljel.
6
Eelnenud info pärineb Automaatika mõõtmiste e-kursuselt.
Induktiivandurite
eeliseks on vastupidavus ja
usaldusväärsus , mille põhjuseks on
nende suletud
disain ja liikuvate osade puudumine. Induktiivandurit
valides tuleb arvestada, kuidas teda hakatakse kasutama. Neid
toodetakse erinevate tajumisula-tustega. Tuleb arvestada, kas andur
peab
tajuma lineaarselt või radiaalselt lähenevat objekti. Alati
tuleb kasuks põhjalikult tutvuda anduri andmelehega.
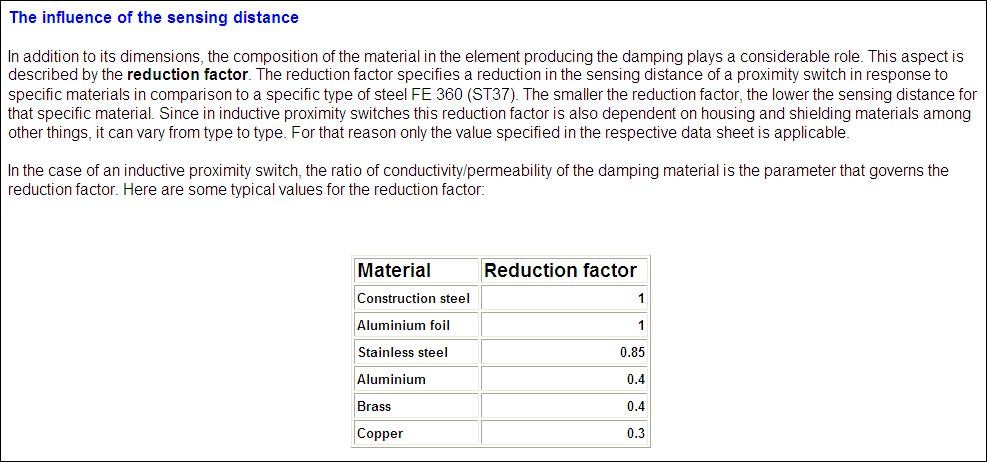
Samuti
tuleb arvesse võtta reduktsioonifaktorit, mis oleneb materjalist.
Induktiivanduri tööd (lülituskaugusele) mõjutab ka objekti
materjal. Mida suurem on materjali voolu-
läbivus , seda suurem on
anduri lülituskaugus. Teemakohane väljavõte tarkvarakesk-
konnast on toodud alljärgnevalt.
Induktiivanduri
lülituskaugus oleneb mitte üksnes materjali liigist, vaid ka
tuvastatava objekti
suurusest – mida väiksem objekt, seda väiksem
lülituskaugus.
7
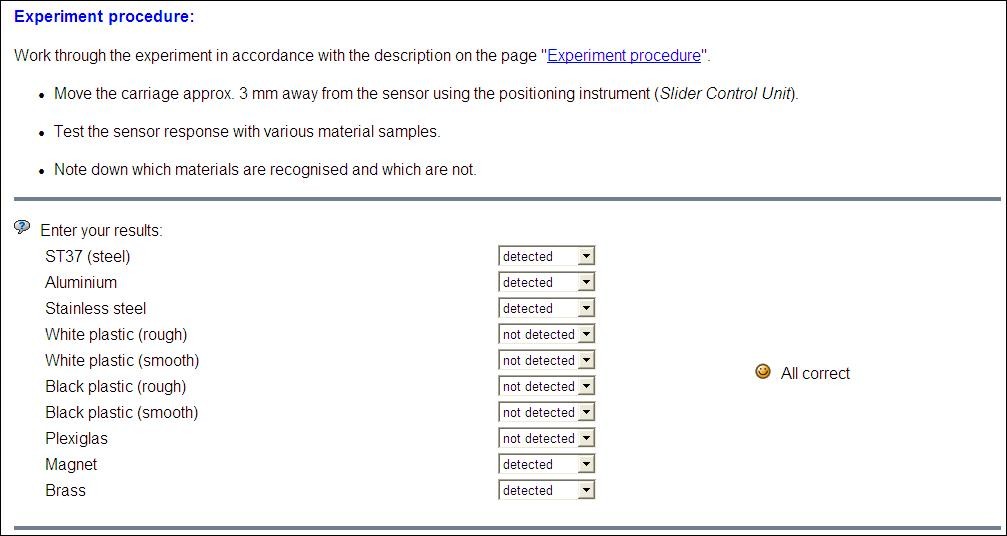
Järgnevalt
sooritati
eksperiment , kus erinevatest
materjalidest kalibreerimisplaate asetati induktiivandurist ~3 mm kaugusele.
Materjalid, mille tulemusel induktiivandur
edastas signaali, olid:
vask,
püsimagnet , roostevaba teras, alumiinium ja teras. Tule-
musi iseloomustab ka
allolev väljavõte.
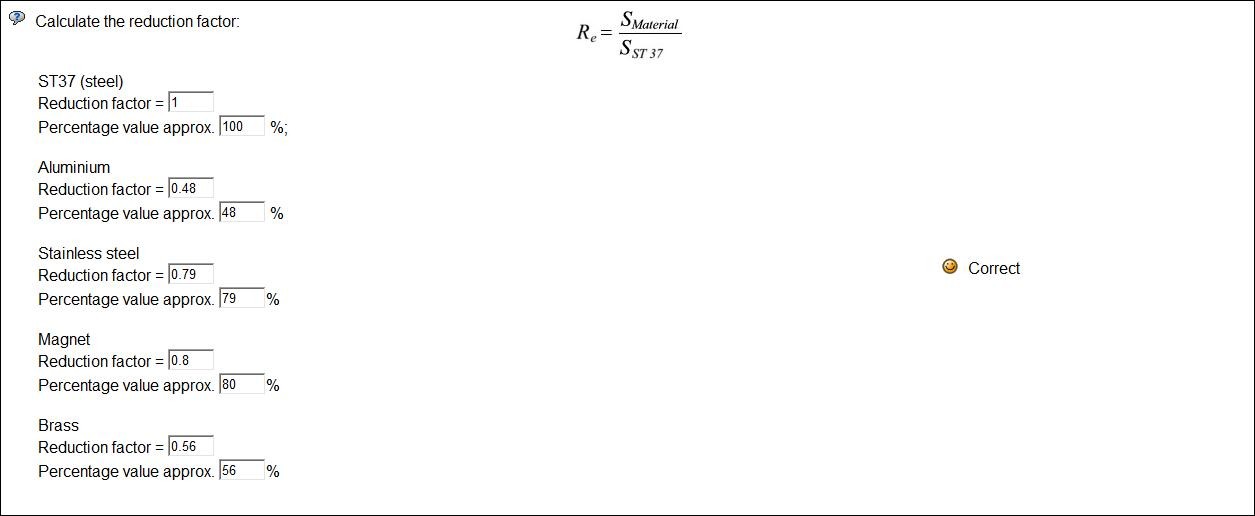
Lisaks
sooritati katseid erinevate materjalidega leidmaks anduri objekti
tuvastamise võime
piire . Saadud tulemuste põhjal leiti kõigi
elementide reduktsioonitegurid, mis olid sarnased teoreetilises
pooles esitatud andmetele. Reduktsiooniteguri leidmisel võeti
aluseks terase (ST37) lülituskaugus, millega jagati avaldatava
materjali lüli-tuskaugus.
8
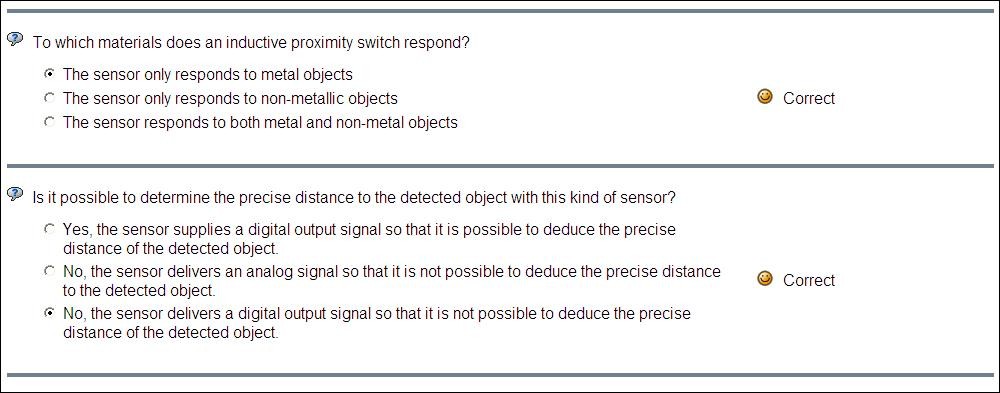
Kokkuvõtvalt:
induktiivse lähedusanduriga on võimalik tuvastada ainult
metallobjekte, mille kaugust ei ole võimalik määrata, kuna andur
väljastab ainult digitaalsignaale.
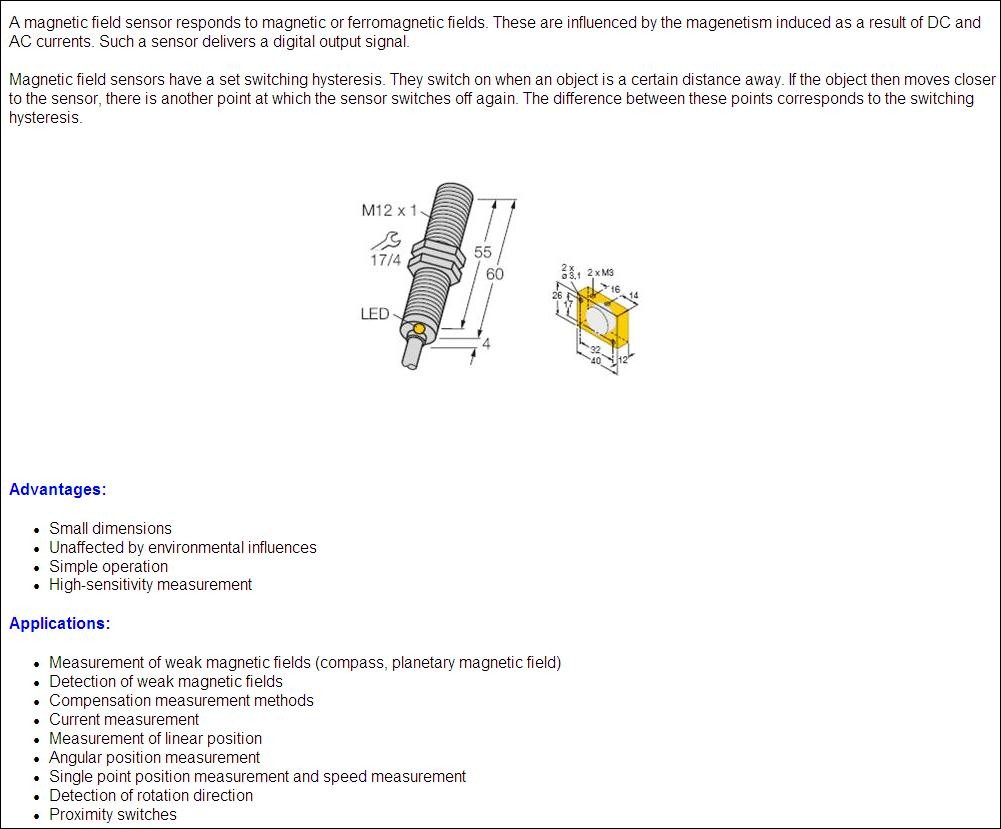
1.2.
MagnetväljaandurMagnetväljaandur
reageerib magnetväljale. Alljärgnevalt on esitatud vastav väljavõte
tarkvarakeskkonnast L@Bsoft.
9
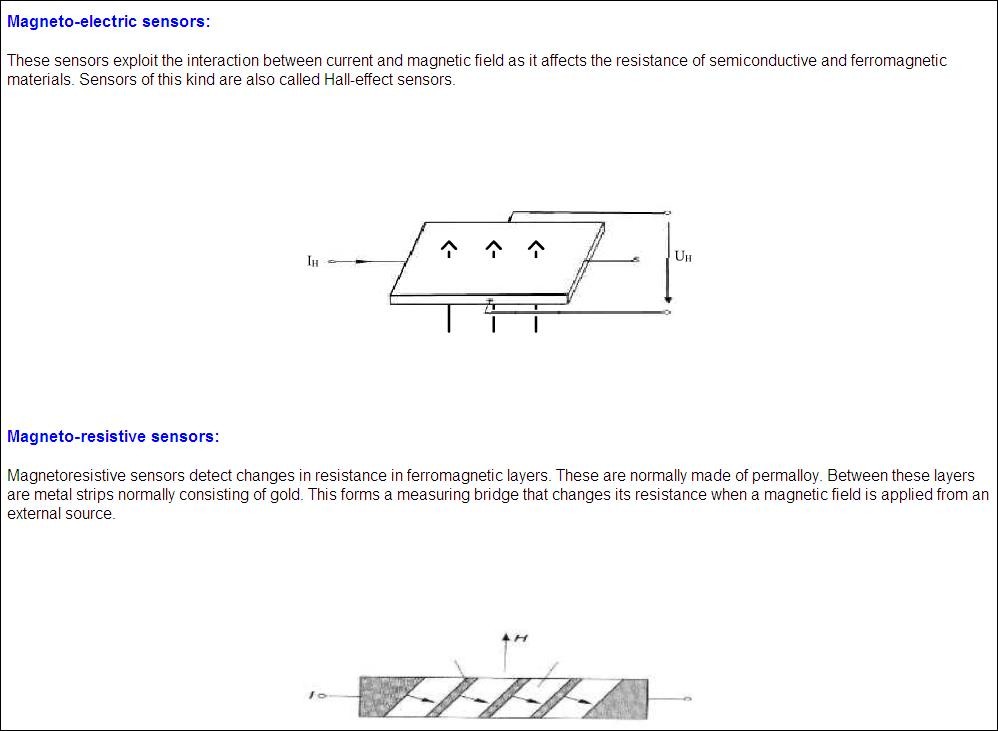
Magnetväljaandureid
leidub erinevate tööpõhimõtetega. Alljärgnevalt on esitatud
neist peamised.
Joonisel
esimesena kujutatu kirjeldab Halli tajuri tööpõhimõtet. Halli
tajuri töö põhineb Halli efektil, mis seisneb elektrivälja
tekkimises magnetväljas asetsevas vooluga ju-his.
Teisena kujutatud tööpõhimõte tugineb magnettakistuse omadusele.
Magnettakistus on materjali omadus muuta oma
elektrilist takistust
väikse magnetvälja rakendamisel.
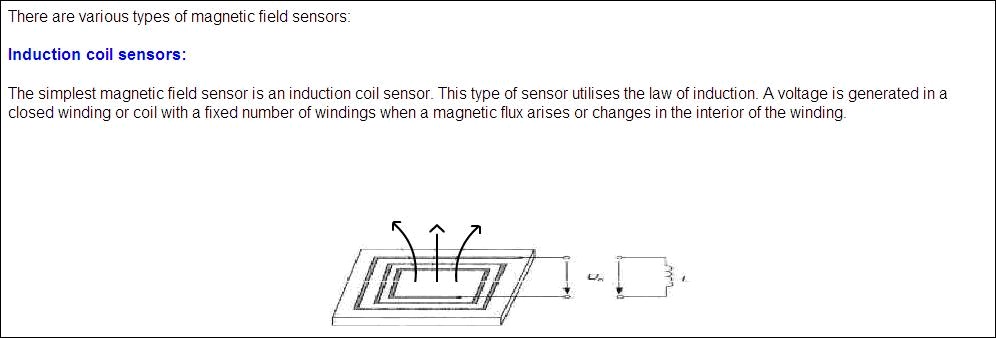
Kõige
lihtsamat tüüpi magnetväljaandur põhineb aga induktisoonil:
mähises tekib indutseeritud pinge kui magnetvälja tugevus kasvab.
Illustreeriv joonis asub järgmisel leheküljel.
10
Järgnevalt
sooritati eksperiment, kus erinevatest materjalidest
kalibreerimisplaate asetati magnetväljaandurist ~3 mm kaugusele.
Ainus materjal, mille tulemusel mag-netvälja andur edastas signaali,
oli püsimagnet. Tulemusi iseloomustab ka allolev väljavõte.
Samuti
tehti kindlaks magnetvälja anduri sisselülitumis- ning
väljalülitusmishetked. Tulemused (mm) on esitatud alljärgneval
joonisel.
11
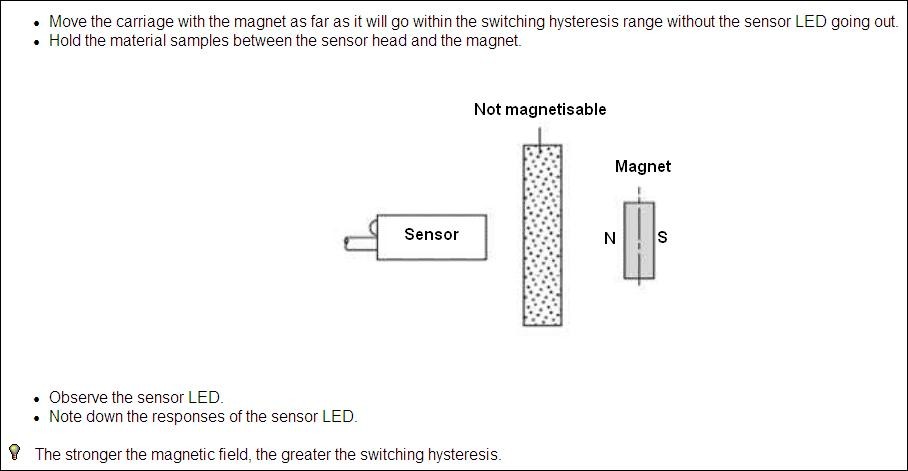
Järgnevalt
sooritati eksperiment, kus püsimagneti ning anduri vahele asetati
erine-vatest materjalidest kalibreerimisplaate. Eksperimendi olemust
iseloomustab allolev joonis.
Selgus,
et ainult
terasest kalibreerimisplaadiga oli võimalik mõjutada
katsetulemust. Teiste materjalide korral anduri väljundsignaal ei
muutunud. Katse tulemusi iseloo-mustab ka allolev joonis.
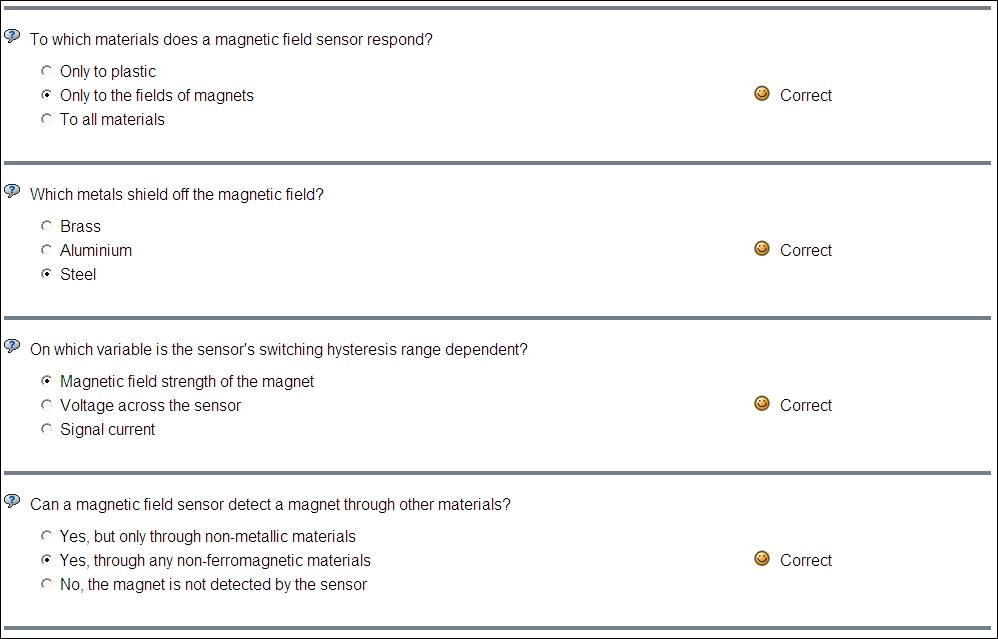
Kokkuvõtvalt:
magnetvälja andur reageerib ainult magnetväljale, terasest
materjaliga on võimalik magnetvälja varjata anduri eest, anduri
hüsterees sõltub otseselt magneti magnetvälja tugevusest.
Magnetvälja andur tajub magnetvälja ka läbi teiste materja-
lide ,
mis ei ole ferromagneetilised.
Kuvatõmmis
kokkuvõtvast testist on esitatud järgmisel leheküljel.
12
1.3.
Optoelektroonilised anduridOptoelektroonika
(kreeka keeles
optos
'nähtav') on
elektroonika haru, mis hõlmab valguskiirguse ja
elektrivoolu vastastikuse muundamisega seotud nähtusi ning nen-del
nähtustel põhinevaid optoelektronseadiseid. Niisuguste seadiste
talitluses osale-vad peale elektronide ka optilise kiirguse,
sealhulgas nähtava valguse kvandid –
footonid .
Informatsiooni
töötlemiseks, edastamiseks ja kuvamiseks ning energia muun-damiseks
kasutatavate optoelektronseadiste
põhiliigid on järgmised:
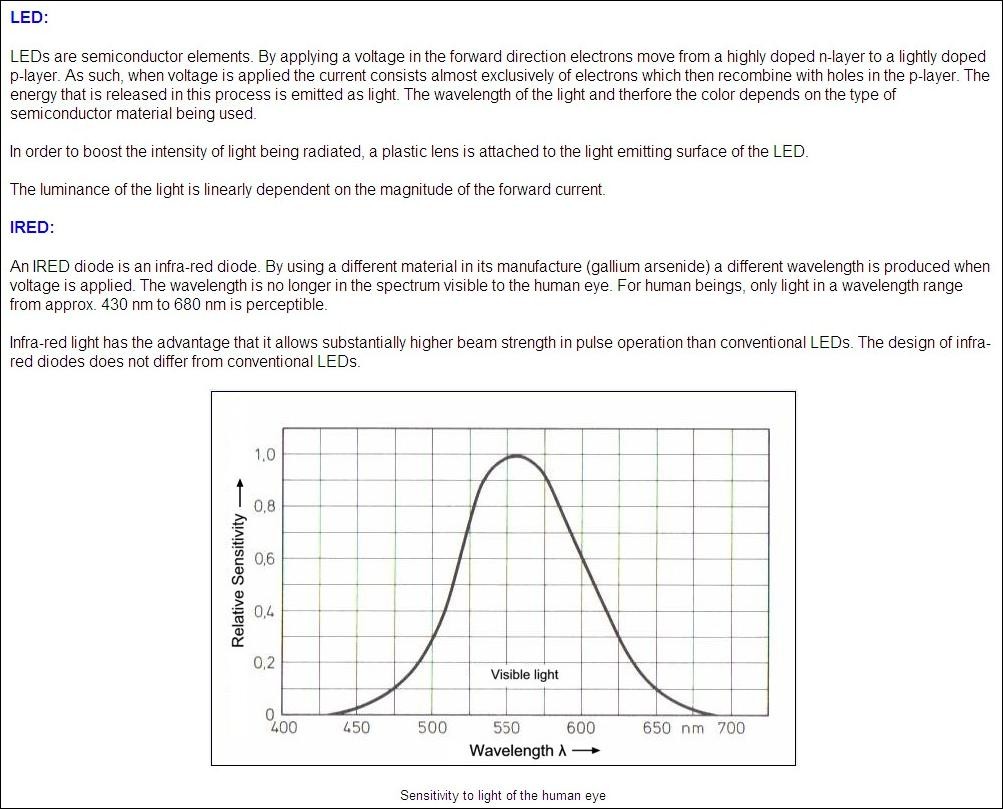
- optoelektroonilised kiirgusallikad ‒ pooljuhtseadised, mis muundavad elektri-energiat optiliseks kiirguseks, kusjuures kiirgusspekter võib olla nähtava või ka nähtamatu (infrapunase või ultravioletse) valguse alas ; seesugused kiirgurid on valgusdiood ja laserdiood;
- optoelektroonilised kiirgusvastuvõtjad ‒ pooljuhtseadised, mille elektrilisi omadusi mõjutab optiline kiirgus, näiteks fototakisti, fotodiood , fototransistor; kiirgusvastuvõtjate hulka kuulub ka mikrokiibina teostatud CCD- sensor .
13
Niisugust
optoelektronseadist, mis koosneb kiirgusallikast ja sellega
optiliselt si-
destatud
kiirgusvastuvõtjast, nimetatakse optroniks ehk optiliseks paariks
[5].
Optilisi
paare kasutatakse väga laialdaselt erinevate probleemide
lahendamiseks.
Kiirgusallikana
võidakse kasutada LED elemente või
infrapuna dioode. Alljärgnevalt
on esitatud vastav väljavõte tarkvarakeskkonnast L@Bsoft.
14
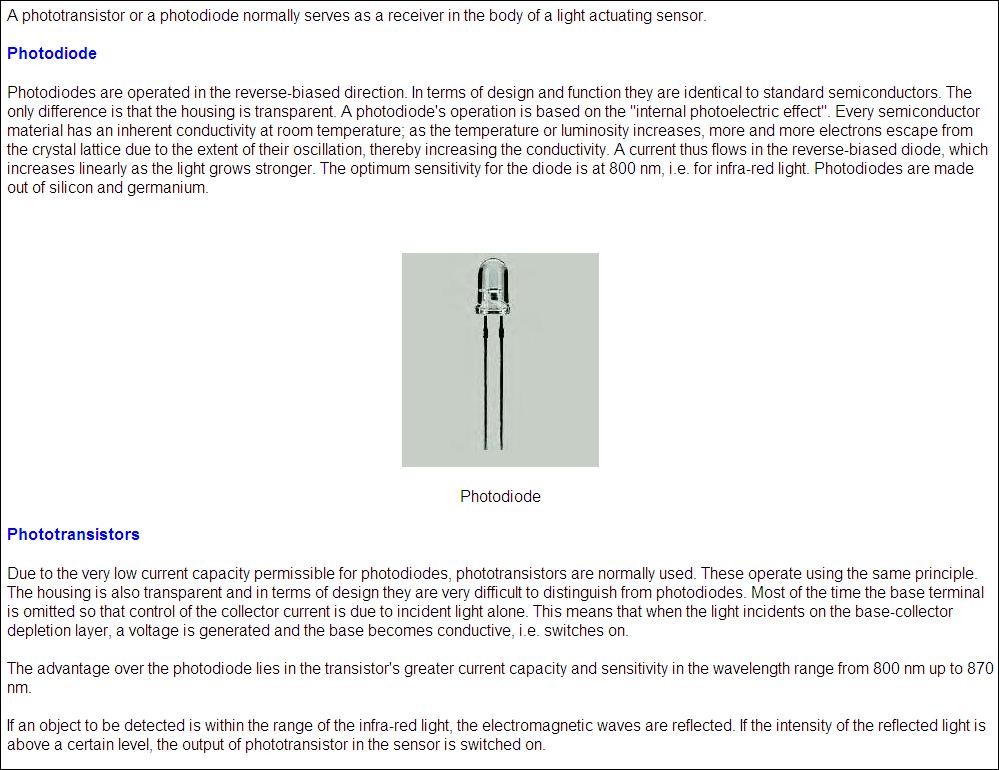
Kiirgusvastuvõtjana
võib kasutada näiteks fotodioodi või fototransistorit. Järgnevalt
on esitatud sellekohane väljavõte tarkvarakeskkonnast L@Bsoft.
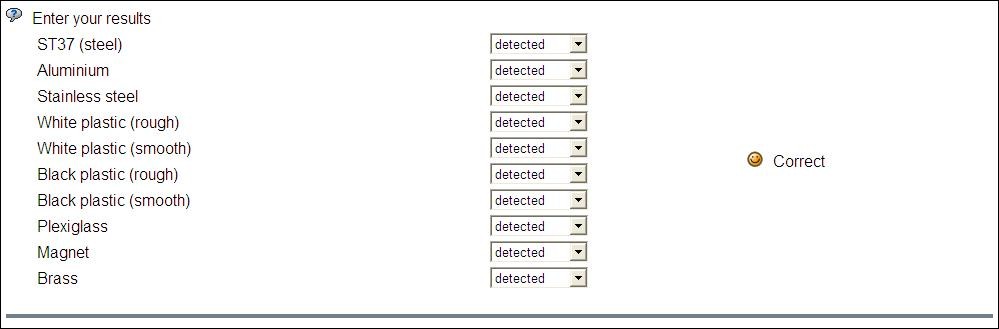
Järgnevalt
sooritati eksperiment, kus erinevatest materjalidest
kalibreerimisplaate asetati optoandurist ~40 mm kaugusele. Andur
edastas signaali iga
kalibreerimis -plaadi korral. Tulemusi
iseloomustab ka allolev väljavõte.
15
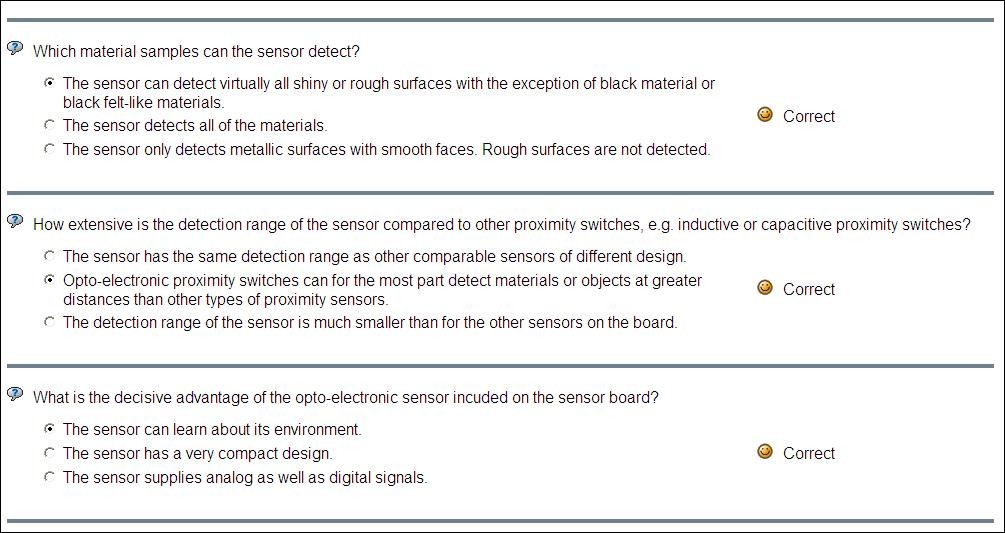
Katsetes
kasutatav andur tuvastas praktiliselt kõiki materjale. Raskusi võib
tekkida musta või mustadena tunduvate materjalidega.
Optoelektrooniliste lähedusandurite-ga on võimalik tuvastada
objekte märkimisväärselt
kaugemalt kui näiteks induktiiv-või
mahtuvusanduriga. Alljärgnevalt on esitatud kokkuvõtvad testi
küsimused.
Järgmisena
võeti kasutusele teine, fiiberoptiline lähedusandur, millele samuti
näidati erinevatest materjalidest detaile ~20 mm kauguselt. Tulemusi
iseloomustab allolev väljavõte.
16
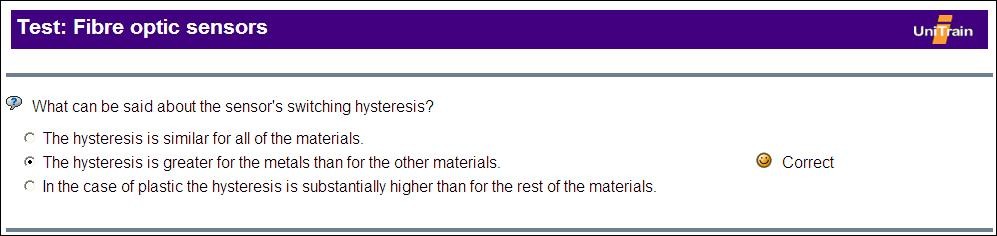
Sooritati
katsed leidmaks anduri sisselülitamise ning väljalülitamise
piirväärtuseid.
Ilmnes , et hüsterees on suurim metallist
materjalide puhul.
1.4.
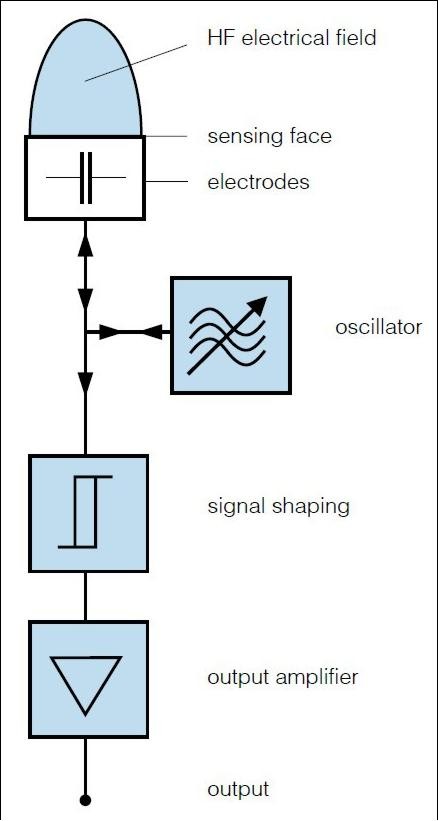
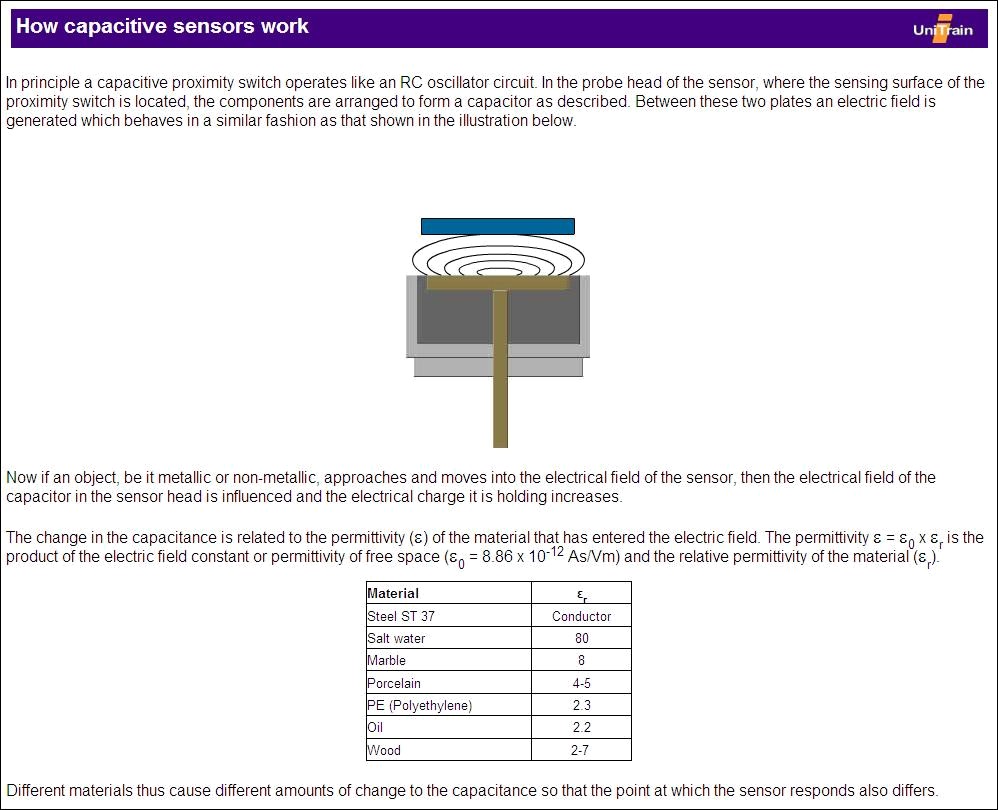
MahtuvusandurMahtuvusandurid
reageerivad ükskõik mis materja-list objekti lähendamisel.
Mahtuvusanduri konden-
saatori plaadid võimaldavad tunnistada
dielektrilisi tingimusi selle anduri pea vahetus läheduses.
Sõltu-valt tunnistatava objekti ja anduri vahelisest kaugu-sest,
muutub mõõtetsoonis
mahtuvus .
Mahtuvus
sõltub mitte ainult objekti kaugusest vaid ka objekti materjali
dielektrilisest läbitavusest ja objekti kujust.
Objekti
lähenemisel andurile, suureneb mahtuvus. Kui etteantud läviväärtus
on saavutatud, käivitatakse transistoril ostsillaator, mille abil
sisseehitatud elektroonika genereerib muutuvat voolu anduri
väl-jundis analoogsignaalina või
binaarse pingena.
Mahtuvusandureid
valmistatakse kas sünteetilisest materjalist või metallist
korpuses, kaetuna epoksiidkompaundiga.
Järgmisel
leheküljel on esitatud vastav väljavõte tarkvarakeskkonnast
L@Bsoft.
17
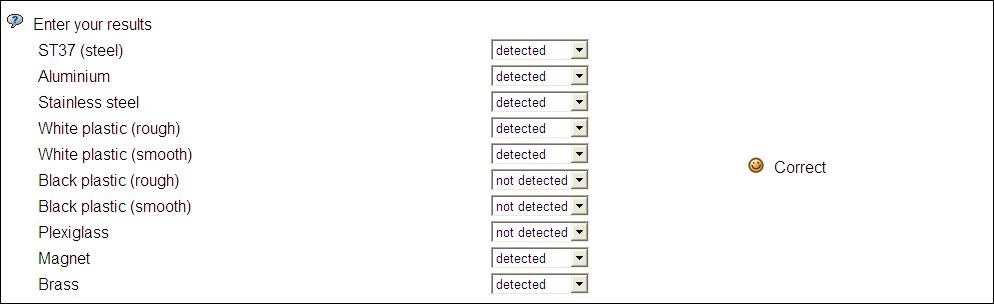
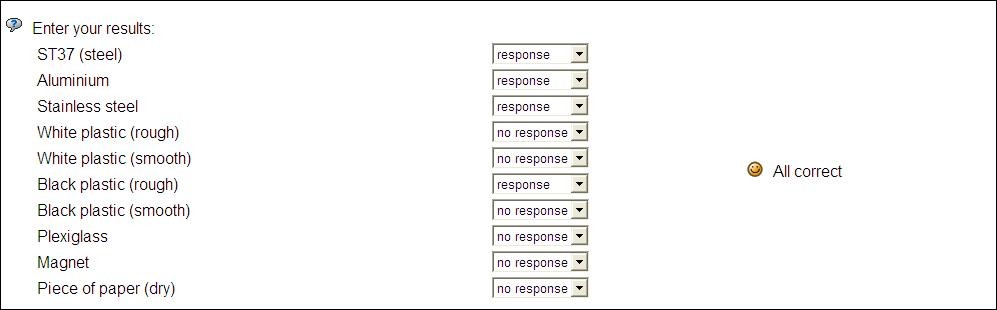
Järgnevalt
sooritati eksperiment, kus erinevatest materjalidest
kalibreerimisplaate astetati mahtuvusandurist ~5 mm kaugusele.
Tulemusi kajastab allolev väljavõte.
18
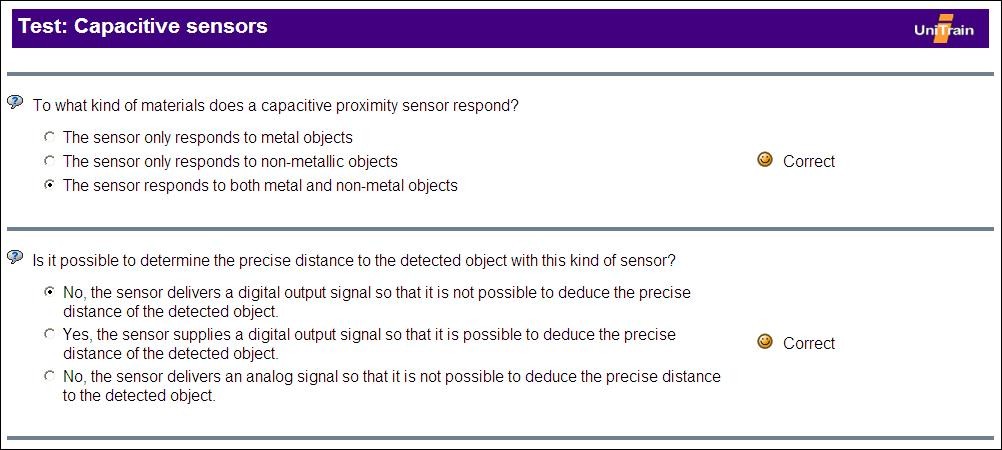
Lõpuks
sooritati teadmiste test, mille kohta on esitatud väljavõte
alljärgnevalt.
19
2.
MITTEELEKTRILISTE SUURUSTE MÕÕTMINEMitteelektrilistest
suurustest oleneb väga palju elektrilisi suurusi. Seega on võimalik
mõõta elektrilist suurust, mis on sõltuv mitteelektrilisest
suurusest ehk muundada mitteelektriline suurus
elektriliseks .
Elementi,
mis on ettenähtud mitteelektriliste suuruste muundamiseks
elektriliseks, nimetatakse anduriks. Andur koosneb tajurist,
mõõtelülitusest ja normeerivast sig-naalmuundurist. Tavaliselt
toimub andurites signaalide muundamine kahes etapis.
Tajurid , mida
nimetatakse ka primaarmuunduriks, muudavad signaali liiki, näiteks
mehaanilist suurust elektriliseks. Sekundaarmuundurid viivad
muundatud signaali standardsele
kujule . Nad kujutavad endast
erinevaid seadmeid nagu näiteks või-mendeid,
analoog-digitaalmuundureid,
digitaal -analoogmuundureid jms.
Andurid
jagunevad parameetrilisteks ja generaatoranduriteks. Parameetrilised
andu-rid muundavad mõõdetavat mitteelektrilist suurust anduri
mingiks parameetriks – ta-kistus,
induktiivsus või mahtuvus, mille
mõõtmiseks on vaja toiteallikat. Gene-raatorandurites muundatakse
mõõdetav mitteelektriline suurus elektromotoorjõuks [6].
2.1.
TemperatuurTemperatuur
on kõige laiemini mõõdetav ja reguleeritav tehnoloogilise
protsessi
muutuja . Temperatuuri mõõtmist ei tule ette mitte üksnes
tööstuses. Temperatuur mõ-jutab kõiki meie elu külgi nii kodus
kui ka tööl. Temperatuur on üks kolmest termodü-naamilise keha
termilisest olekuparameetrist.
Temperatuur
iseloomustab keha
kuumenemise astet, temperatuur määrab soojusvoo
suuna. Soojusvoog on alati suunatud kõrgema temperatuuriga kehalt
madalama tem-peratuuriga kehale [7].
2.1.1.
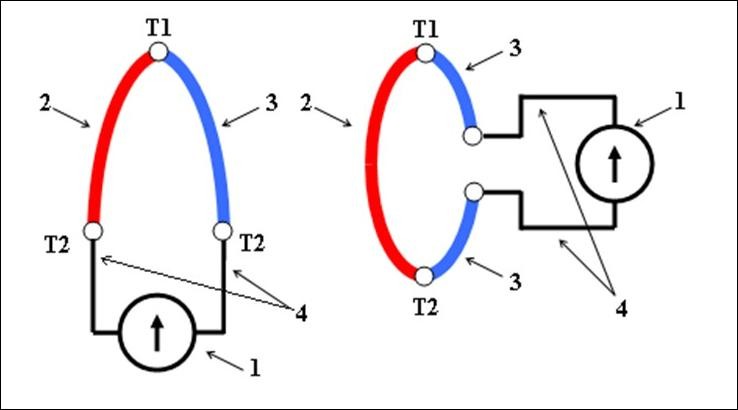
TermopaarTermoelektrilise
termomeetri moodustab termopaar koos termoelektromotoorjõu
mõõteriistaga – potentsiomeetri või millivoltmeetriga. Kahest
erisugusest elektrijuhist koosnevas kinnises ahelas tekib
elektrivool, kui ühenduskohtade temperatuurid eri-
20
nevad.
Vool tekibki termoelektrimotoorjõu mõjul.
Termopaare
valmistatakse metallidest, nende sulamitest (levinumad
põhikom-ponendid Fe, Cu, Ni, Pt), metallkeraamilistest ja
pooljuhtmaterjalidest trivool, kui ühenduskohtade temperatuurid
erinevad.
Termopaaride
ühendused : 1 – Mõõteriist; 2,3 – termoelektroodid; 4 –
ühendusjuht-med; T1, T2 – „külm ja soe" termopaari
ühendused.
2.1.2.
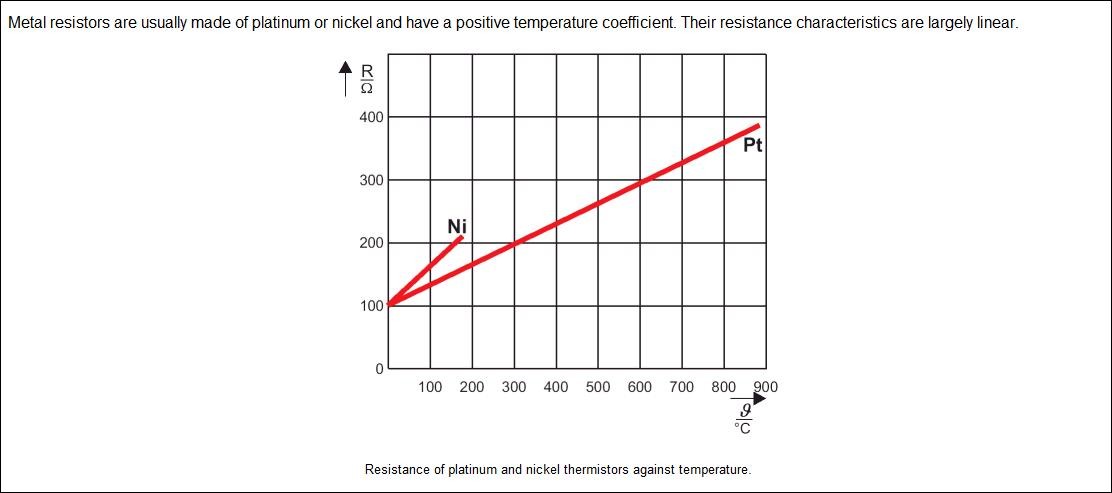
TakistustermomeetridTakistustermomeetride
töö põhineb metallide ja pooljuhtide elektrilise takistuse
muutumisel sõltuvalt temperatuurist. Takistuse ja temperatuuri
vaheline
sõltuvus R=f(T) on paljude materjalide korral stabiilne
ning suures ulatuses lineaarne. Kuna takistuse muutumist on võimalik
lihtsalt muundada pinge või voolu muutumiseks, on
termotakistustajurid suhteliselt lihtsa ehitusega.
Takistustermomeetritega saab mõõta temperatuuri alates absoluutse
nulli lähedalt kuni +1000 °C ja enam, täpsusega 0,001 °C.
Kasutatakse
takistuse suure temperatuuriteguriga materjale, milleks sobivad enam
mõningad puhtad metallid, mis on keemiliselt inertsed kogu
mõõdetavas temperatuu-rivahemikus. Metalli oksüdeerumine põhjustab
takistuse suurenemise ning rikub anduri gradueeringu. Kõige
sobivamad on materjalid, mille takistuse temperatuurite-gur sõltub
temperatuurist lineaarselt –
plaatina , vask,
nikkel ja raud. Kõige
enam sobib neist omakorda plaatina, mis on keemiliselt inertne ning
millel on lineaarne tun-nusjoon.
21
Plaatina
korral mõõdetav temperatuur on kuni 1200 °C (kõrgemal
temperatuuril algab metalli aurustumine).
Vask
on termotakistustajuris kasutatav kuni 180 °C (kõrgematel
temperatuuridel vask oksüdeerib väga kiiresti ning tal on vähene
keemiline vastupidavus agressiivsele keskkonnale. Vase eeliseks on
hea töödeldavus, odavus ning kättesaadavus.
Niklil
on suur takistuse temperatuuritegur α = 0,0064, alates
temperatuurist +370 °C toimuvad niklis struktuursed muutused,
mistõttu taksituse temperatuurisõltuvus on oluliselt
mittelineaarne.
Raua
(terase) takistuse temperatuuritegur on samuti suur, α = 0,0065 ning
sõltub vähesel määral lisanditest. Nii raua kui ka terase
peamiseks puuduseks tuleb lugeda keemilist aktiivsust, sest
temperatuuridel üle 100 °C korrodeerub raud väga kiiresti [7].
2.1.3.
TermistorTermistor
ehk
termotakisti on termoelektriline pooljuhtseadis, mille ta-kistus
sõltub tugevalt ja mittelineaarselt temperatuurist.
Seega
on termistoril suur takistuse temperatuuritegur. Seda tegurit
väljendab ta-kistuse suhteline muutus protsentides 1-kraadise
temperatuurimuutuse kohta.
Olenevalt
valmistamiseks kasutatud materjalidest võib see tegur olla
positiivne (lü-
hend PTC ing k
positive temperature coefficient)
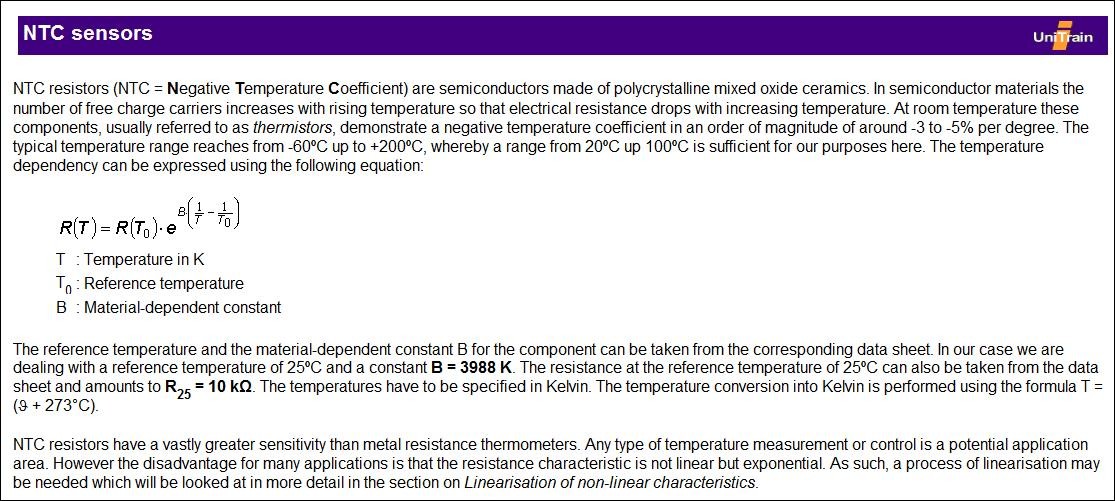
või negatiivne (NTC
negative tem-perature coefficient).
Positiivse temperatuuriteguriga termistoride ehk PTC-termistori
takistus
temperatuuri tõustes kasvab (vooluahelasse ühendatud termistori
läbiv vool vastavalt väheneb). NTC-termistoride takistus
soojenemisel väheneb. Tem-peratuuriteguri absoluutväärtus on
PTC-termistoridel enamasti kuni 30 %/K, NTC-ter-mistoridel ehk
NTC-termistoridel 2 …10 %/K.
22
2.1.4.
NTC termistorEsimese
katsena uuriti negatiivse temperatuuriteguriga termistori.
Alljärgnevalt on esitatud vastava teema sissejuhatuse väljavõte
tarkvarakeskkonnast L@Bsoft.
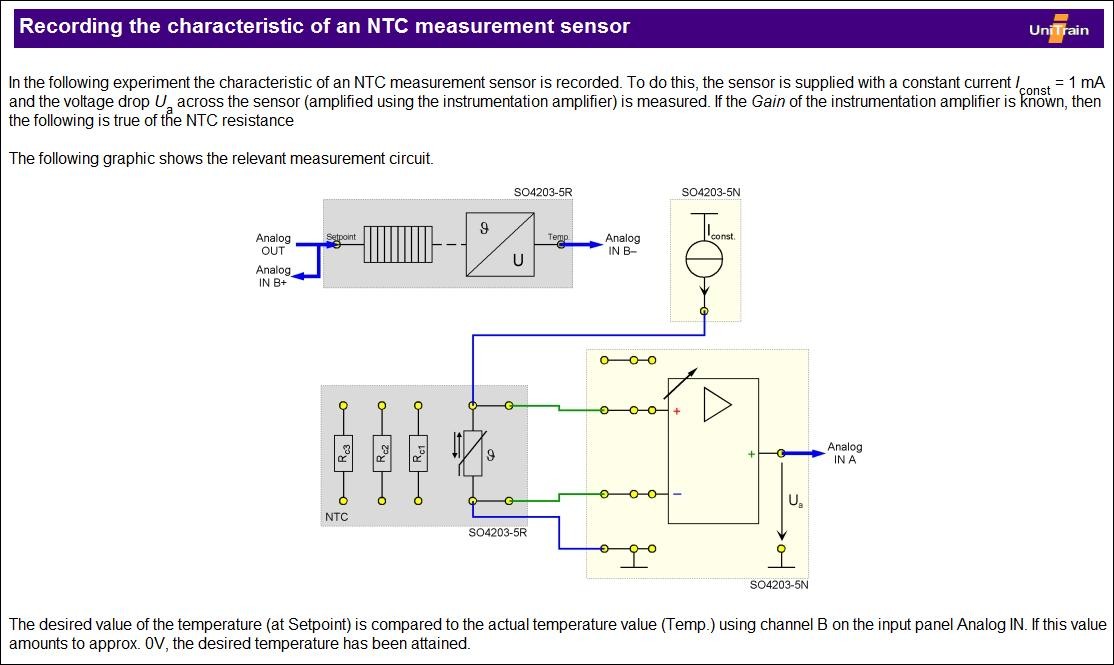
Katse
eesmärgiks oli talletada NTC termistori
tunnusjoon , mida tehti
alljärgnevalt esitatud juhistele.
23
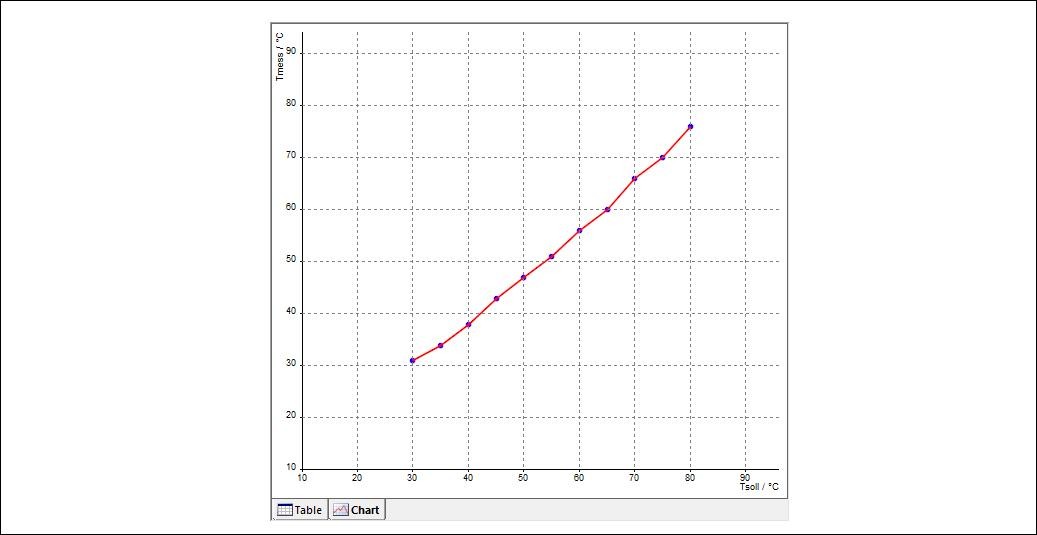
Tulemustest
selgus, et tekkinud tunnusjoon on praktiliselt lineaarne ehk
temperatuuri tõustes tõuseb lineaarselt ka materjali takistus.
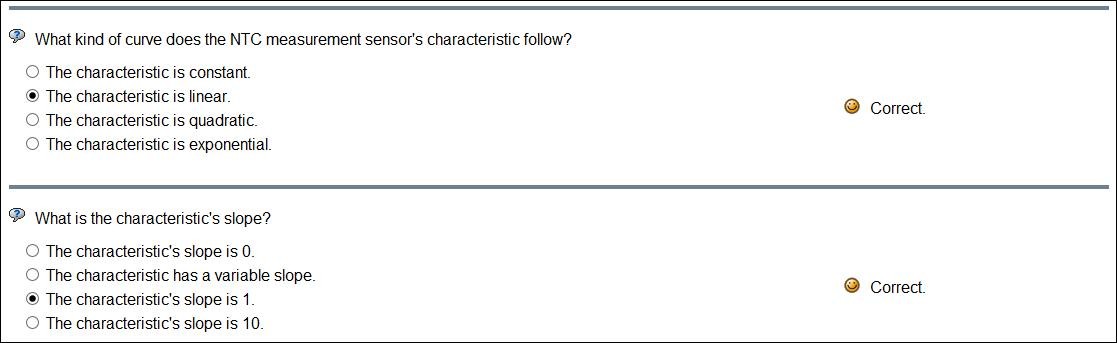
Alljärgnevalt
on esitatud testi tulemused.
24
2.1.5.
PTC termistorTeise
katsena uuriti positiivse temperatuuriteguriga termistori.
Alljärgnevalt on esita-tud tunnusjoon raua ning plaatina takistuse
sõltuvus temperatuurist.
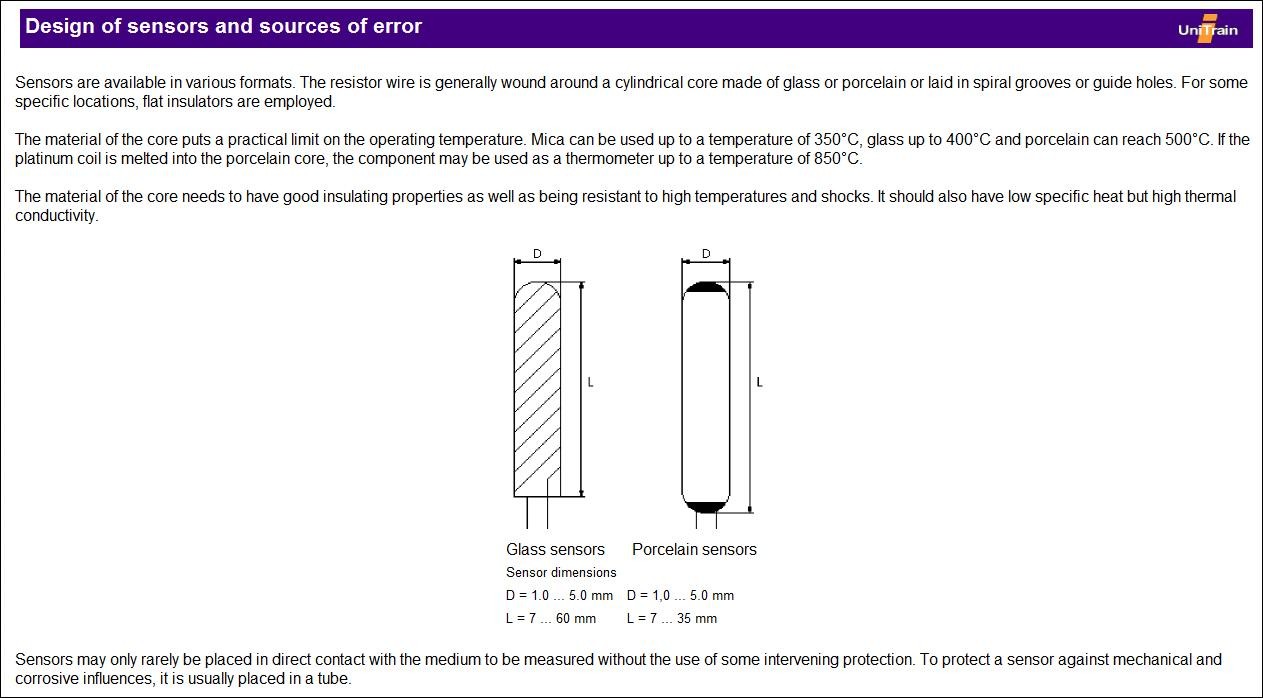
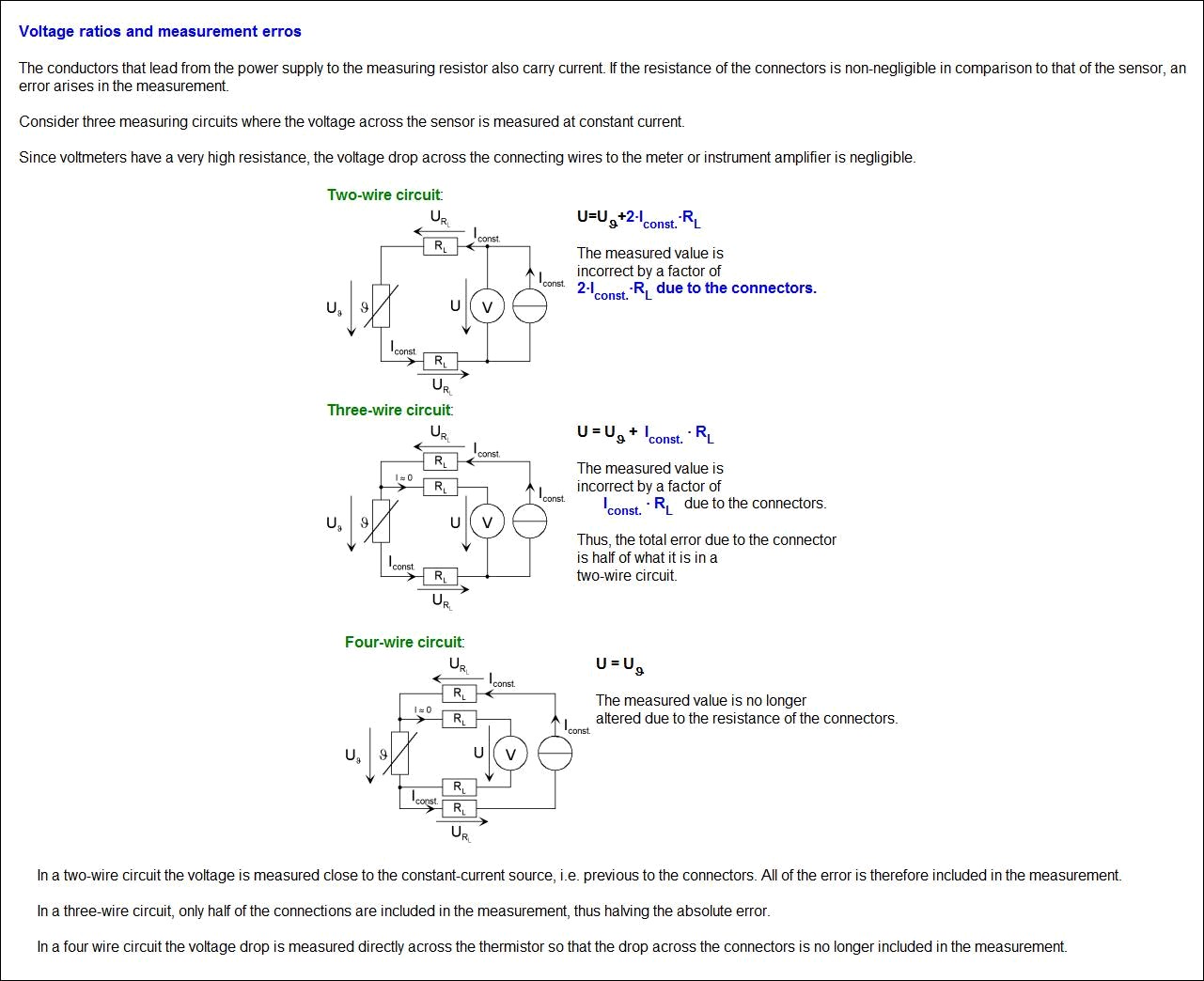
PTC
termistori ehitust iseloomustab alljärgnev väljavõte
tarkvarakeskkonnast L@B-
soft .
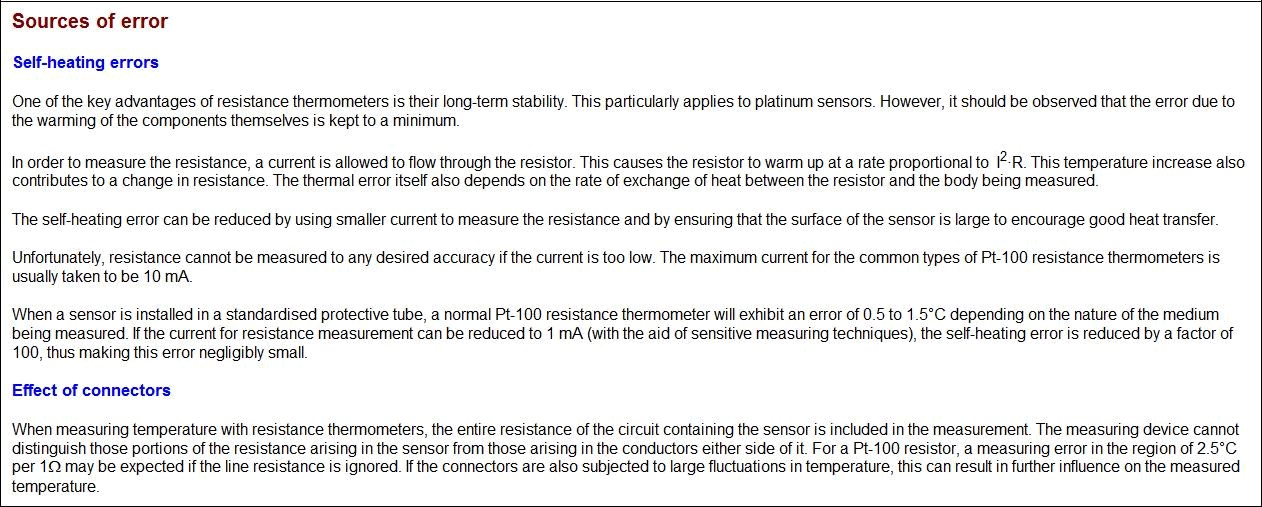
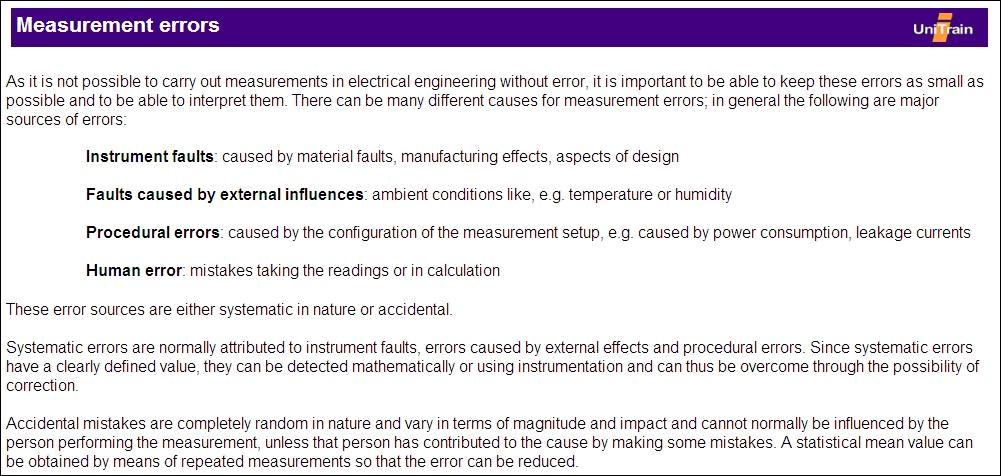
Samuti
on esitatud väljavõte esinevate mõõtmisvigade kohta.
25
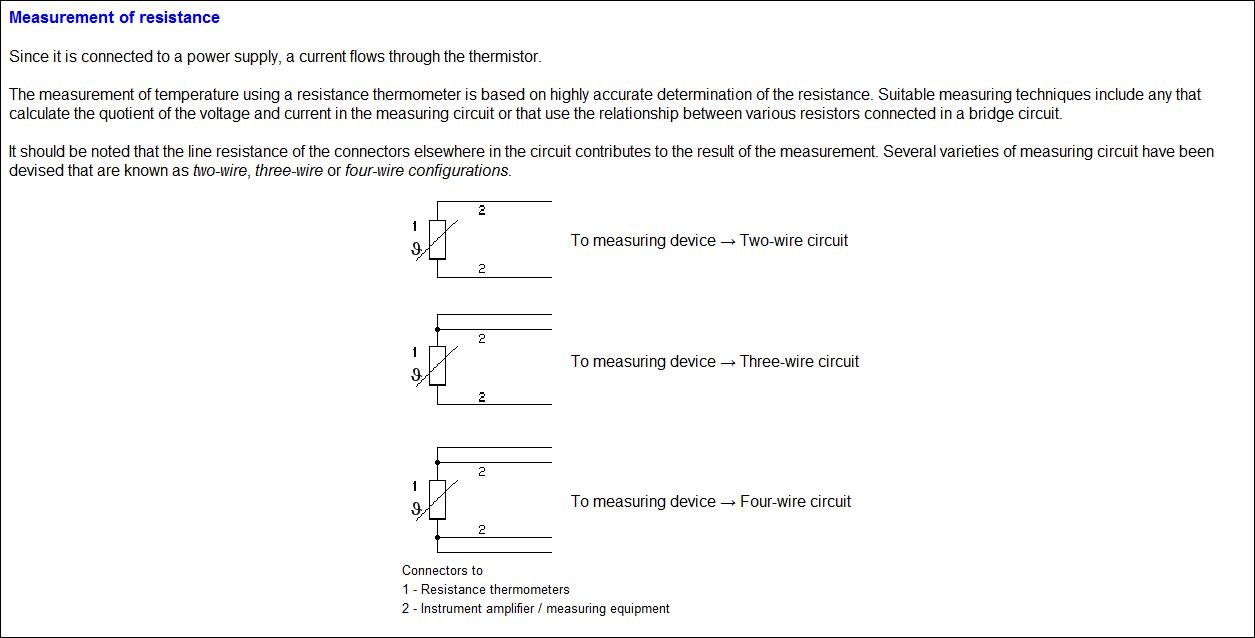
Järgnevalt
on esitatud väljavõtted erinevatest termistori
kasutus-/ühendusviisidest.
26
Väljavõttes
esitatud ühendusskeemide põhjal viidi läbi
eksperimendid katsestendil, mis kinnitasid teooriat.
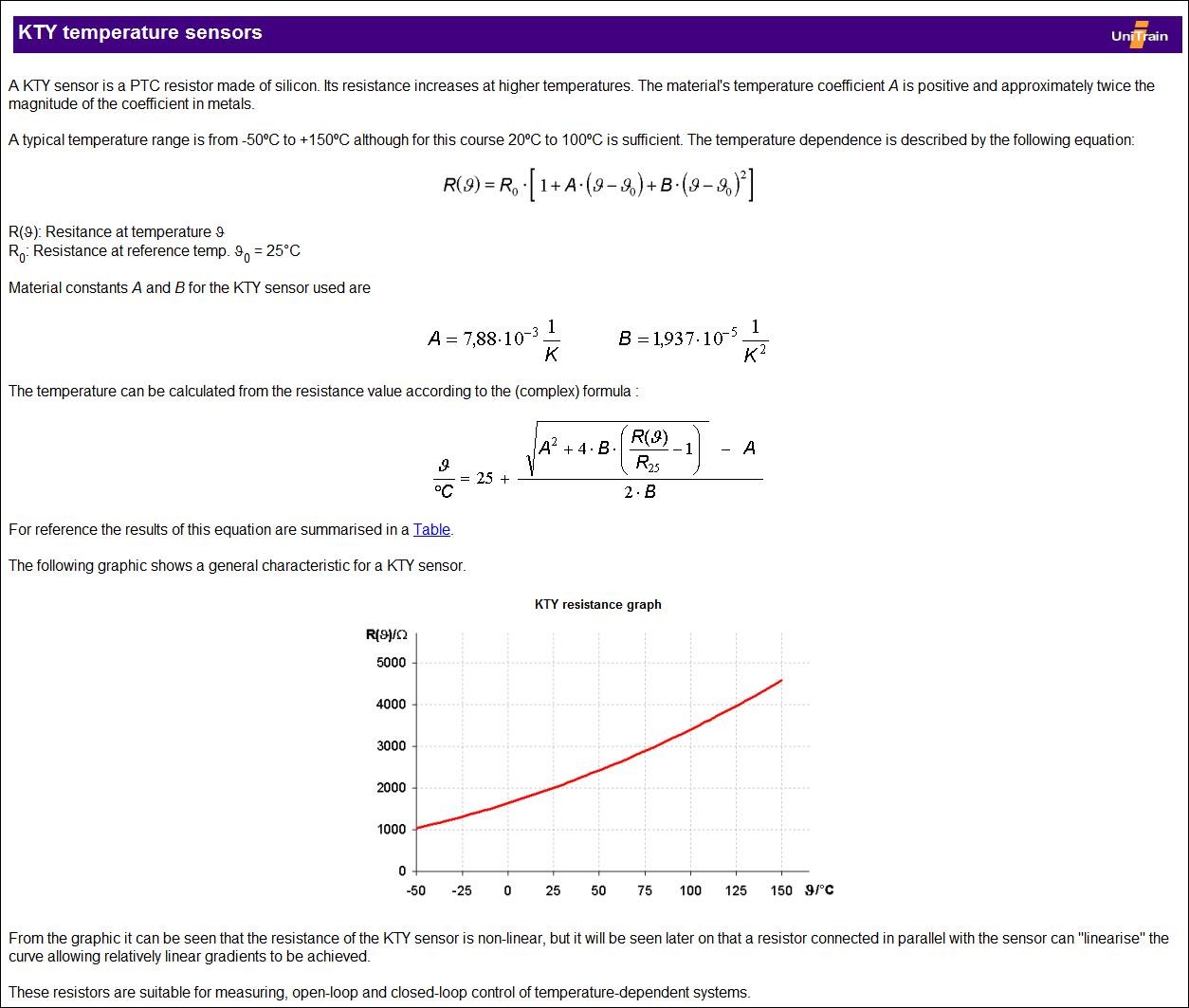
2.1.6.
KTY andurKTY
andur on PTC termistor, mis on tehtud ränist. KTY
andureid kasutatakse peami-selt õhu, gaasi ning vedeliku temperatuuri
mõõtmiseks vahemikus -50ºC kuni 150ºC. Antud andurit
iseloomustab:
- praktiliselt lineaarne tunnusjoon
27
Alljärgnevalt
on esitatud väljavõte KTY anduri kohta tarkvarakeskkonnast L@Bsoft.
28
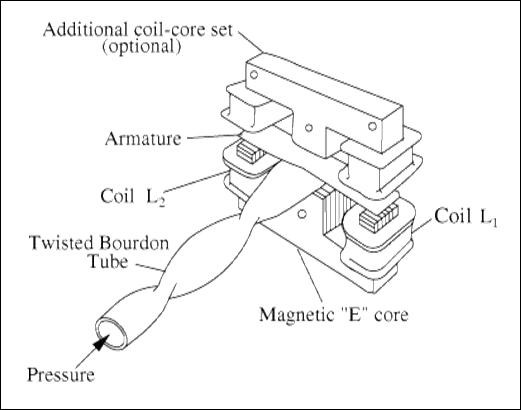
2.2.
RõhkElektrilistes
rõhumõõteriistades muundavad rõhuandurid rõhu elektriliseks
signaaliks. Selliseid manomeetreid kasutatakse kiiresti muutuva rõhu
mõõtmiseks tööstusauto-maatika
seadmetes .
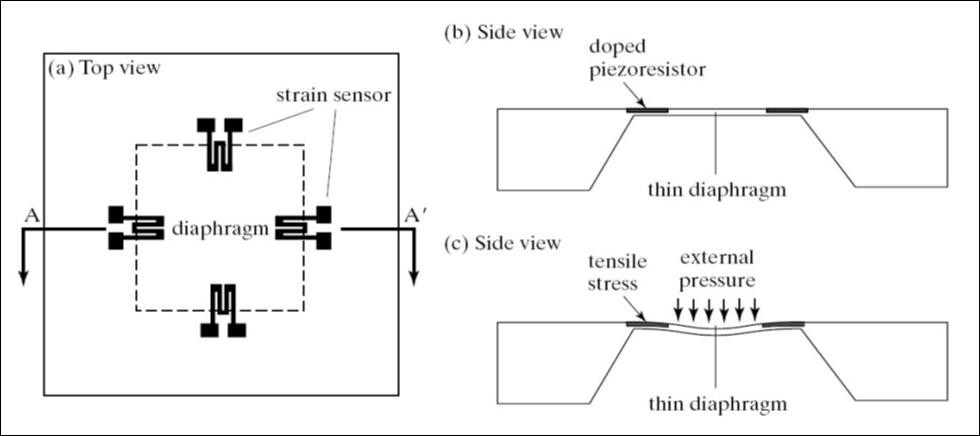
Tensotajuritega
elektriliste manomeetrite tööpõhimõtte seisneb selles, et rõhu
mõjul deformeerub
membraan koos sellesse paigaldatud
tensotakistitega.
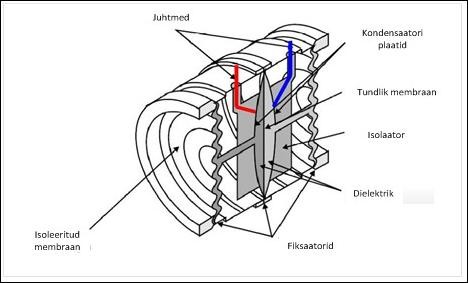
Mahtuvuslikus
rõhuanduris põhjustab tundliku membraani deformeerimine
konden-saatori mahtuvuse muutumise.
29
Induktiivrõhuanduris
tekitab rõhk elektromagnetsüsteemi induktiivsuse muutumise (rõhu
mõjul muutub õhupilu suurus).
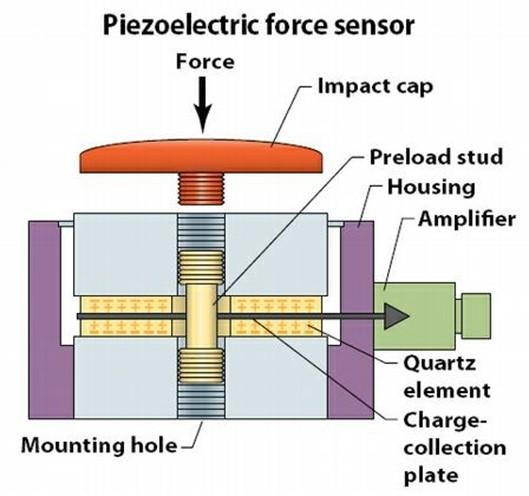
Piesoelektrilistes
andurites tekitab
mehaaniline surve kristallis elektrilaengu.
30
2.3.
Jõud ning pöördemomentEnimkasutatavad
jõu- ja mehaanilise pinge andurite tüübid on järgmised:
- piesoelektrilised andurid;
Tensoandurid
on
kas
elektrijuht - või pooljuhtmuundurid. Nende talitlus põhineb
veni -tusefektile.
Venitusefekt
on anduri aktiivtakistuse muutus selle geomeetrilise suuruse ja
vastupa-nu muutuse tõttu
elastsel mehaanilisel deformatsioonil. Sel
viisil saadud muutust iseloomustavad suhteliselt väikesed väärtused.
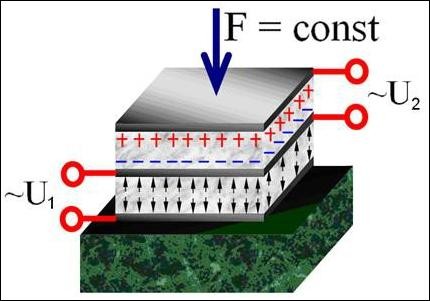
Piesoelektrilised
anduridNende
andurite töö põhineb piesoelektrilisele efektile, mis esineb
mõnedes dielektri-listes materjalides. Kui sellisest materjalist
lõigatud plaati mehaaniliselt koormata, see
polariseerub ja tema
pinnal tekivad rakendatud jõuga võrdelised elektrilaengud. Koormuse
eemaldamisel polarisatsioon ja laengud kaovad. Seda nähtust
nimeta-takse otseseks piesoelektriliseks
efektiks .
Kui
selline plaat asetada elektrivälja, tekib temas mehaaniline pinge
või muutuvad
geomeetrilised mõõtmed. Seda nimetatakse kaudseks
piesoelektriliseks efektiks.
Laialdaselt
kasutatavate piesoelektrikute tüüpiliseks näiteks on moonutusteta
kristalli-võrega kvarts. Seignette sool ja mõned keraamilised
materjalid: piesoelektrikutena kasutatakse ka kunstlikult
polariseeritud baariumtitanaati, plii-tsirkoonium-titanaati jne.
Piesoelektrilised
andurid on generaatori tüüpi.
Elektrilised laengud tekivad välise
jõu mõjul.
Jõudude
mõõtmiseks
kasutatava anduri tekitatud laengud ja pinge jäävad
samaks ai-nult siis, kui mõõteahelal on lõpmata suur
sisendtakistus, mis on praktiliselt võimatu.
Piesoandurite
minimaalsed talitlussagedused on tavaliselt (1 ... 0,5) Hz.
Staatiliste
31
jõudude
mõõtmiseks kasutatakse nn piesotrafosid.
Magnetoelastsed
anduridMagnetelastsed
muundurid põhinevad magnetoelastsel efektil, mis avaldub
fer-romagnetiliste materjalide
magnetilise läbitavuse muutuses
välistest jõududest põh-justatud mehaaniliste pingete toimel.
On
olemas ka vastupidine nähtus, mida nimetatakse magnetostriktiivseks
efektiks, mis avaldub magnetvälja paigutatud ferromagnetiliste
materjalide geomeetriliste
mõõtmete muutuses. Seega, kui
ferromagnetilise eseme mõõtmed suurenevad, on see positiivne
magnetostriktsioon, kui väli vähendab eseme mõõtmeid –
negatiivne magnetostriktsioon. Raual ja enamusel rauasulamitel esineb
positiivne magnet-ostriktsioon, kuid nikkel jt on negatiivse
magnetostriktsiooniga.
Magnetoelastse
efekti abil saab mõõta jõude, mehaanilisi pingeid ja momente.
Mag-netostriktiivse efekti põhjal on välja töötatud
ultrahelilainete
allikaid .
32
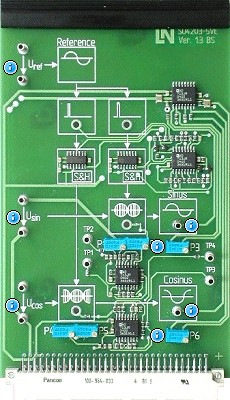
RiistvaraInduktiivanduri:
Tööpinge on 15V
Anduri
signaali nullitakse potentsiomeetriga.
Pinge
luuakse mõõtesillal ja võimendakse kõrgsagedus vahelduvoolu
pingega.
Amplituudi
ja faasi pinge (0° või 180 °) sõltub raudsüdamiku positsioonist.
Väljundit
kontrollib takt-
generaator .
Mahtuvusandur:
Tööpinge 15V, 5V
Efektiivne
plaadi pindala määrab mahtuvuse. Kondensaator on osa resonantsi ja
määrab resonantssagedus f väljalülitamiseks. Sagedusega pinge (f
/ V) muundurit on ühendatud pärast seda võrku ja see aitab muuta
sagedust proportsionaalseks väljundpingega. Diferentsiaalvõimendi
reguleeritav offset ja
gain muudab väljundit konverterist pakkuda
viimast väljundit, väljundi pessa.
Asendi
ja kiiruse andur: Tööpinge 15V, 5V
Sellele
plaadile on erinevaid kettaid.
Töötab
hall sensori abil (hall sensor
lülitus ).
Magnetvälja
tekimisel lülitub ehk annab loogilit ühte,
Sellel
plaadil on 3 lülitit mille abil
same tuvastda pöörlemiskiirust ja
asendit ja seda saab teha läbi encoder.
Väljastab
binaar kujus.
Võimendi :
Tööpinge 15V, 5V
(100-kHz
sinusoid )
Võimendab
signaali et neid oleks parem lugeda nii
sinus kui
cosinus .
KOKKUVÕTEKatsete
käigus õppisin tundma andureid ja
meetodeid , kuidas mõõdetakse
mitte-elektrilisi
suuruseid . Mõningad asjad oleks võind
tarkvara poolt rohkem lahti selgitatud olla.
Plaanis
on veel iseseisev õppe anduri vea
tuvastamine .
33
KASUTATUD
MATERJALID1
– Andurid. A.
Annus , H.Lind, M.Tarma. Valgus. Tallinn 1968
2
– Vikipeedia artikkel: Andur [
https://et.wikipedia.org/wiki/Andur ]
(14.03.2014)
3
– Andurid. T. Lehtla.
[
http://www.ene.ttu.ee/elektriajamid/oppeinfo/materjal/AAR3340/Andurid.pdf ]
(14.03.2014)
4
-
http://www.e-ope.ee/_download/euni_repository/file/4380/AUTOMAATIKA %20MOOOTMISED.zip/
induktiivandurid .html
5
-
https://et.wikipedia.org/wiki/Optoelektroonika 6
-
http://opiobjektid.tptlive.ee/Elektrimootmised_e-kursus/mitteelektriliste_suuruste_m%C3%B5%C3%B5tmine.html 7
-
http://www.e-ope.ee/_download/euni_repository/file/4380/AUTOMAATIKA %20MOOOTMISED.zip/temperatuuri_mtmine.html
8
-
https://et.wikipedia.org/wiki/Termistor 34
























































Kõik kommentaarid