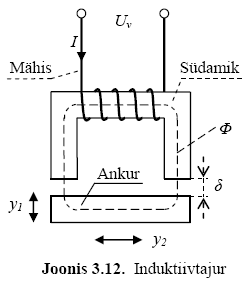
Juhtimine ja automaatjuhtimine.Küberneetika? Juhtimiseks nim mingi saada tajureid, mille mahtuvus C on lineaarses sõltuvuses paagis oleva vedeliku masina või protsessi mõjutamist, nii et selle töö annaks soovitatud tulemuse. ruumalast V, s. t. C = c V, kus c on tajuri erimahtuvus Juhtida võib inimene või masin ise. Käsitsijuhtimise korral on kõik Induktiivtajurid?-Induktiivtajuriteks nimetatakse suurt rühma tajureid, kus juhtimisfunksioonid usaldatud inimesele. Automatiseeritud juhtimisel on need sisendsuuruse (deformatsiooni, nihke, jõu, momendi) muutus põhjustab jaotatud inimese ja automaatide vahel. Automaadid täidavad funksioone ,mida elektromagnetilise süsteemi induktiivsuse muutumist. Lugedes suhteliselt inimene pole füüsiliselt võimeline täitma, või pole inimesle vastuvõetavamad. väikese õhupiluga ferromagnetilises süsteemis puistevoo tühiseks, võib mähise Automaatjuhtimisega
3.ANDURID JA NENDE MÕÕTEPRINTSIIBID. 3.1.Andurite definitsioon ja liigitus. Anduritele esitatavad nõuded, ideaalkarakteristikud. Andur on automaatsüsteemi osa, mis muundab kontrollitava suuruse mõõtmiseks, edastamiseks, säilitamiseks, registreerimiseks, võimendamiseks või juhitavasse seadmesse suunamiseks sobivasse vormi (optiliseks, mehaaniliseks või elektriliseks signaaliks). Andur koosneb tavaliselt tajurist (esmamuundurist) ja ühest või mitmest vahemuundurist. Mõnel juhul moodustab anduri ainult tajur (nt. termopaar, takistustermomeetri andur). Joonisel 0.2.1 on toodud tüüpilise anduri plokkskeem. Andurid liigitatakse füüsikalise tööpõhimõtte järgi: 1. elektrisuuruste muutusel põhinevad andurid : induktiivandurid, mahtuvusandurid, takistusandurid; 2. optilised, kasutavad elektrimagnetilisi protsesse lainepikkustel üle 10¹² Hz.; 3. mehaanilised, kasutavad tahkete kehade liikumist; 4. hüdraulilised, kasutavad vedelike mehaanilisi omadusi; 5. pneum
Süsteemi mõiste. Süsteemimudel. Muutujad ja parameetrid. Sisend-, oleku- ja väljundmuutujad. Millest sõltub süsteemi käitumine. Süsteemi matemaatiline mudel ja selle koostamine. Algolek ja selle sisu. Dünaamiline süsteem. Pidev- ja diskreetaja süsteemid. Süsteemi mõiste: Süsteem on omavahel seotud objektide terviklik kogum. Süsteem on see, mida saab vaadelda süsteemina (süsteem on subjektiivne – kui tahan, vaatan süsteemina, kui ei taha, ei vaata). Süsteem on funktsioon sisendist ja siseolekust, kui see võrrand teada, siis see võrrand on süsteem ehk süsteemimudel. Süsteemi omadused: element/objekt, sidemed (mistahes seosed elementide vahel, võivad olla orienteeritud, vastastikused, muutlikud, juhuslikud jne), terviklikkus, süsteemil on hierarhia, süsteemil on kindel käitumine. Põhiülesanded: süsteemide modelleerimine (mudelite koostamine), süsteemide analüüs (meetodid süsteemide uurimiseks), süsteemide süntees (meetodid süsteemide loomiseks). Sü
parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaatset käivitust, reverseerimist ja peatamist. Võimaldavad hoida mingit parameetrit kindlal tasemel või muuta seda teatud programmi järgi, hoida parameetreid min. või maks. tasemel ja muuta ühte parameetrit nii, et ta jälgiks teist parameetrit, mis võiks muutuda juhuslikult. Automaatjuhtimissüsteemi klassifikatsioon.
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e.
Kontrolltöö nr.1D 1.Põhimõisted (defineeri): Andur. Tajur. Reguleeriv organ. Võimendi. Täitur. Andur on automaatsüsteemi osa, mis muundab kontrollitava füüsikalise suuruse (parameetri) teiseks suuruseks, mida on parem võimendada, mõõta või juhtimiseks kasutada. Tajur on välistoimele tundlik ning sellele vahetult reageeriv anduri osa Reguleeriv organ element, mis vahetult mõjub reguleerimisobjektile reguleeritava suuruse hoidmiseks nõutud tasemel. Võimendi on seade milles teostatakse sisendsignaali võimsuse suurendamine välise energiaallika abil. Täitur on regulaatori element, mis läbi anduri ja võimendi tulevale signaalile (korraldusele) reageeri. Selleks võib olla elektri-, hüdro-, või pneumomootor, solenoidventiil, kraan, siiber jne. 2. Automaatsüsteemide klassifikatsioon (defineeri): Automaatsignalisatsioonisüsteemid (ASS). Laeva automaatikaseadmed klassifitseeritakse: A. Otstarbe järgi: 1.Juhtimisseadme
Lisakoormuse tõttu võib võnkumiste genereerimine katkeda ning rakendub signaalimuunduri juhtlülitus (relee- või loogikalülitus). Vastavalt vajadusele väljastatakse kas loogiline "0" või loogiline "1" signaal, mis vastavad normaalselt la-hutatud (N/O) või normaalselt suletud (N/C) kontaktidele. Induktiivanduri magnetvälja iseloomustav joonis asub järgmisel leheküljel. 6 Eelnenud info pärineb Automaatika mõõtmiste e-kursuselt. Induktiivandurite eeliseks on vastupidavus ja usaldusväärsus, mille põhjuseks on nende suletud disain ja liikuvate osade puudumine. Induktiivandurit valides tuleb arvestada, kuidas teda hakatakse kasutama. Neid toodetakse erinevate tajumisula-tustega. Tuleb arvestada, kas andur peab tajuma lineaarselt või radiaalselt lähenevat objekti. Alati tuleb kasuks põhjalikult tutvuda anduri andmelehega.
vahendi konspektiivne iseloom. Seega on õpilastel vajalik aktiivselt osaleda tundides ja soovitavalt ka konspekteerida õppejõu täiendavaid selgitusi. Ja loomulikult ei sisalda õppevahend sellist materjali või on see esitatud väga napilt, mida on võimalik leida teistest kättesaadavatest allikatest, millistele on õppevahendi tekstis vihjatud ja mis on ära toodud kirjanduse loetelus või mida on põhjalikult käsitletud teistes õppeainetes nagu näiteks automaatika alused, digitaaltehnika, elektrimasinad, elektri- ajamid jne. Kuna käesolev õppevahend on autori teada esimene selleteemaline kutsekeskharidus- koolidele koostatud üllitis, ei ole välistatud selles ka ebatäpsused ning vead ja autor on juba ette tänulik kõikide märkuste ja täpsustuste eest. Rein Kask Jaanuar 2007.a. Sisukord Sissejuhatus ................................................................................ 6 S1. Põhimõisteid ..........
























Kõik kommentaarid