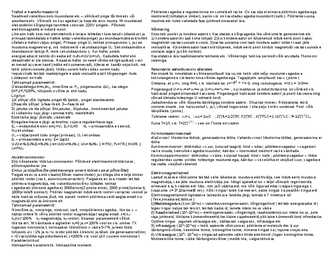
Aktiivtakistuse mõõtmine Ülekandetegurid Voltmeetri ülekandetegur SKEEM 0,05 Ampermeeteri ülekandetegur 0,001 A Mõõteaparaatidelt loetud näidud V U I R 15 35 20,5 30,5 71 20,5 45 105 20,5 61 142 20,5 Tegelikud mõõtmistulemused U I R 0,750 0,035 20,5 1,525 0,071 20,5 2,250 0,105 20,5 3,050 0,142 20,5 Arvutuslikud tulemused Aktiivtakistused Volt-ampermeetriga mõõdetud R, takistuste aritmeetiline keskmine 21,429 21,454 21,479 Te...
Suletud reguleersüsteem, struktuur, skeemi elemendid ja tööpõhimõte: Automaatreguleerimissüsteem (ARS) on seadmete kompleks, mis koosneb töömasinast ning reast abiseadmeist, mis on ette nähtud töömasina juhtimiseks. Abiseadmed moodustavad automaatregulaatori. Reguleerimist iseloomustab pidev kontroll reguleeritava suuruse üle. Kontrolli teostadakse tagasiside abil. Sektoriteks jagatud ringikestaga 2 tähistadakse signaalide liitmist. Valgesse sektorisse saabuv signaal loetakse positiivseks, musta sektorisse saabuv signaal negatiivseks. 1) Seadur annab välja võrdlussuuruse X0, millega määratakse vajalik reguleeritava suuruse väärtus 2) võrdleb seadurist X0 ja andurist y tulevaid signaale ning tekitab vajadusel veasignaali x= X0-y 3) ülesandeks on anda X0-ga samasuguse füüsikalise iseloomuga signaal y, mis on reguleeritava parameetriga võrdeline 4) muunduri ülesandeks on vajaduse...
Tiguülekanne Tiguülekanne on ülekanne, mida kasutatakse pöörlemisliikumise ülekandmiseks võllide vahel, mille teljed on kiivad. Telgede vaheline nurk on tavaliselt 90°. Võimalikud on ka teised nurgad, kuid selliseid ülekandeid kohtab harva. Tiguülekanne koosneb pöörlevast kruvist, mida nimetatakse teoks, ja tigurattast, mille pöial olevate hammastega hambuvad teo keermeniidid. Ülekande vedavaks lüliks on tigu. Tiguülekande eelised sujuv ja müratu töö võimalus saada väikeste gabariitide juures suuri ülekandearve isepidurduvus Tiguülekande puudused madal kasutegur hammasülekannetega võrreldes väike ülekantav võimsus (tavaliselt mitte üle 70 kW) suur kulumine vajadus kasutada kalleid materjale, nagu näiteks pronks Tiguülekandes nagu hammasülekandeski esinevad tigu ja tiguratta silindrilised algpinnad. Nende p...
Kaalu ümberjaotumise arvutus Rehvi laius 200 mm Rehvi profiil 59 % Veljemõõt 15 ' Teljevahe 2.7 m Rööbe Ees 1.4 m Taga 1.42 m Massikeskme kõrgus Ees 0.4 m Taga 0.4 m Rehvi koormamata raadius Ees 0.3085 m Taga 0.3085 m Rehvi vertikaalne jäikus Ees 300 N/mm Taga 300 N/mm Roll Centre kõrgus Ees -102 mm Taga 48 mm Vedru jäikus Ees 84.3 N/mm Taga 192.6 N/mm Vedru ülekandetegur Ees 0.988 Taga ...
Suletud reguleerimissüsteemi struktuurskeem ja tööpõhimõte. P Programmseade (nukkvõll, tiftidega ketas, perfolint või arvutimälu). Annab ette sätte y0(t). A - Andur muundab väljundsignaali ülekandmiseks ja võrdlemiseks sobivaks suuruseks. VE - VõrdlusElemendi väljundis tekib vea signaal (). V Võimendi võimendab veasignaali. TM Võimendi väljundsignaal mõjub TäituvMehhanismile, mille kaudu regulaator mõjutab Reguleerivat Elementi. RE Reguleeriv Element mõjutab Objekti, muutes sellelel antavalt ainet või energia hulka. Tagasiside. Tagasiside on väljundi mõju sisendile. Positiivse tagasiside korral on sisendisse tagasi antav signaal sisendsignaaliga samas faasis ja seega tugevdab üldist sisendsignaali. Negatiivse tagasiside signaal on sisendsignaaliga vastasfaasis ja seega nõrgendab üldis...
1 Milles seisneb elektromagnetilise induktsiooni nähtus? El mag indukts nähtuseks nimetatakse elektrivoolu tekkimist kinnises kontuuris, kui magnetväli milles see kontuur asetseb muutub. 2 Magnetvoo määratlus, vastav valem ja SI ühik. magnetvoog on mingit kontuuriga piiratud pinda läbivate magnetvälja jõujoonte arv f-magnetvoo ühikuks 1 weeber (WB) S-pindala mida vool läbib F=BS cos alfa B-magneetiline induktsioon(T) a-nurk induktsioonivektori ja normaali vahel 1 Weeber on magnet voog mis läbib kontuuri pindalaga 1 ruutmeeter sellega ristuvas magnetvälja mille magnetiline induktsioon on 1 Tesla 3. Faraday elektromagnetilise induktsiooni seadus. Kontuuris tekkiv elektromotoorjõud on võrdeline magnet voo muutumise kiirusega kontuuris. 4. Lenzi reegel, selle rakendamine induktsioonivoolu suuna määramiseks kontuuri läbiva kindla suunaga välja ...
Automaatika alused 1. Põhimõisted 1.1 Milles seisneb automaatjuhtimine? Automaatika on teaduse ja tehnika haru, mis tegeleb automaatseadmete ning automatiseeritavate tehniliste protsesside kontrollimise ja juhtimise meetodite ja vahenditega. Definitsiooni kohaselt on automaatikal kaks põhiharu: automaatkontroll ja automaatjuhtimine. 1.2 Milles seisneb süsteemi orienteeritus? Süsteemi orientatsioon e suunatoime väljendub süsteemi signaalipaaride vastastikuse toime olulises ebasümmeetrias, millel põhinebki süsteemi sisendsignaali (edaspidi sisend) ja väljundsignaali (edaspidi väljund) eristamine. Sisend mõjutab väljundit, viimase tagasimõju sisendile aga puudub (on reaalses süsteemis tühine). Orientatsioon on tarvilik igasuguse informatsiooni ülekandmisel. 1.3 Mis iseloomustab süsteemi sisendit? Sisend on süstee-mist sõltumatu ja peab süsteemi analüüsil olema teada. 1.4 Mis iseloomustab süsteemi väljundit? Väljund on orienteeritud sü...
LK 166 harjutus: 12)Milline nõue esitatakse ampermeetri takistuse kohta? Miks? Ampermeetri takistus RA peab olema võimalikult väike, et pingelang (delta) UA=IRA ja võimsusekadu (delta) PA=I2RA oleks temas väikesed. 15)Milline nõue esitatakse voltmeetri takistuse kohta? Miks? Voltmeetri takistus RV peab olema võimalikult suur, et tema vool IV=URV ja võimsuskadu (delta) PV=U2/RV oleks väike. 20)Millist mõju avaldab elektrimootorile pikemat aega väljas seismine? mähiste isolatsioonitakistus langeb alla 0,5 M ja mähised põlevad läbi Lk 187 Harjutus: 3)Miks valmistatakse trafo südamik elektrotehnilise terease lehtedest? Pöörisvoolude vähendamiseks kasutatakse elektrotehnilise terasest lehekesi mis on omavahel lakiga isoleeritud. 8)Mida tähendab järgmised mähiste nimetused:Primaarmähis, sekundaarmähis, ülempingemähis, alampingemähis? ...
• Nimeta kontakttakistust halvendavad tegurid. Väike kontaktpind, vähene kontaktsurve tugevus, kontaktpindade oksüdeerumine, isoleerkile, liiga kõvast/pehmest metallist kontaktid. • Kui vahelduvvoolu elektrikaar kustub, muutub pinge kaarevahemikus kaare kustumispingest võrgupinge hetkväärtuseni. Kuidas nimetatakse seda protsessi ja tekkivat pinget? Seda protsessi nimetatakse pinge taastumiseks ja tekkivat pinget taastuvpingeks. • Kas aktiivahela väljalülitamisel tekib taastuspinge ja miks? Aktiivahela väljalülitamisel taastuvpinget ei teki, sest vool ja pinge on faasis. • Millist protsessi nimetatakse adiabaatiliseks? Adiabaatiline protsess on protsess, mis ei oma soojus-, massi- või ainevahetust teda ümbritseva keskkonnaga. • Mida on elektrikaare kustutamiseks vaja? Elektrikaare kustutamiseks on vaja, et deionisatsioon toimuks kiiremalt, kui ionisatsioon. • Mida väljendab juhi püsitemeratuur jagatuna aja k...
Elektromagnetism Elektromagnetiline induktsioon · Elektromagnetilise induktsiooni nähtus nähtus, mille puhul muutuv magnetväli tekitab elektrivoolu · Magnetvoog (tähis, valem) - füüsikaline suurus, mis iseloomustab magnetvälja mõju kehale. Tähis: (Fii), ühik: 1 Wb (veeber), põhivalem · Elektromagnetilise induktsiooni seadus induktsiooni elektromotoorjõud on võrdne magnetvoo muutumise kiirusega · Elektromagnetilise induktsiooni nähtuse rakendused magnetsalvestuse lugemine, andurid, mikrofon, dünamo · Lenzi reegel magnetvälja muutused tekitavad voolu sellise suunaga, et tekkiva voolu magnetväli püüab tekkimist takistada · Eneseinduktsiooni nähtus ja seadus elektrivälja muutumisel tekib poolis täiendav elektrivool. Voolu muutumisest poolis tingitud elektomotoorjõud on võrdeline voolu tugevuse muutumise kiirusega. Vahelduvvool · Vahelduvvoolu mõ...
Küsimused „Elektrimootor. Elektriohutusest“ Mis on elektrimootori ülesanne? Mis on staator ja rootor? Missugune on kommutaatori ehitus? Millised on sagedasemad elektrikahjustused? Missuguseid kahjustusi võib põhjustada elektrilöök inimesele? Missugused elektrist tulenevate õnnetuste levinumad põhjused? Õpi selgeks mõisted Kondensaator - elektri- ja elektroonikakomponent, mille põhiomadus on mahtuvus C, s.o võime salvestada (mahutada ja säilitada) elektrilaengut ning seega ühtlasi energiat. Kondensaator koosneb kahest lähestikku paiknevast elektroodist, nn plaadist ja neid eraldavast dielektrikukihist. Induktiivpool - on elektroonikakomponent, mille põhiline tunnussuurus on induktiivsus L, st. ta on võimeline tekitama magnetvälja ja seoses sellega ka talletama energiat. Ta koosneb südamikust ja sellele mähitud isoleeritud traadist mähisest. Aktiivtakistus - elektritakistus vooluahelas, milles puudub induktiivne ja mahtuvuslik komponen...
Võnkering Teooria: Võnkering Koosneb kondensaatorist ja poolist. Kasutatakse elektromagnet lainete tekitamiseks ja raadio vastuvõtjates. Elektromagnetvõnkumiste periood võnkeringis Leitakse Thomsoni valemiga. Maksimaalne voolutugevus Kondensaator on tühi. Võnkumiste sumbumine Kondensaatori elektrivälja energia muutub voolu magnetvälja energiaks ja vastupidi. Toimub tänu takistile. Valemid: Kondensaatori energia Wp=C*U2/2 Pooli energia Wm=L*I2/2 Periood võnkeringis T=2L*C Sagedus võnkeringis F=1/T L*w=1/C*w Transformaator Teooria: Transformaator Seade vahelduvpinge ja voolutugevuse muutmiseks konstantsel sagedusel. Koosneb vähemalt kahest juhtmepoolist ehk mähisest, mis on keritud ühtsele raudplekilehtedest koostatud südamele. Lehed on pöörisvoolu vältimiseks. Kasutatakse auto süütepoolis ning elekrienerg...
(Komponendid1) 1. Elektroonikakomponendid Komponent/element elektroonikaseadme üksikosa. Liigitus: Ehituse järgi: diskreet- ja integraalkomponendid. Ülekande omaduste järgi: lineaar- ja mittelineaarkomponendid. Võimenduse järgi: passiivsed ja aktiivsed komponendid Rakenduse järgi: nõrkvoolu ja jõuelektroonika komponendid Keskkonna järgi: vaakum (elektronlambid, kineskoobid), plasma e.gaaslahendus (indikaatorid, valgustid, kuvarid), tahkis (pooljuhtseadised) Pooljuhtmaterjali järgi: Si, GaAs, SiC jt. ühendid 1.1. Passiivkomponendid a) Takistid (resistors) Takistuse mõiste: staatiline takistus R = U/I ja diferentsiaalne takistus r = du/di. Kasutusala: voolu piiramine, voolumuutused pingemuutusteks, pingejagurid jne. Liigitused: - Püsi- ja muuttakistid (reguleertakistid e. potentsiomeetri...
Piimatööstuse üldseadmed (kordamisküsimused 2017) 1. Püsi- ja demonteeritavad liited Liiteid kasutatakse masinaelementide omavaheliseks jäigaks ühendamiseks eelkõige masina ja selle sõlmede karkassi juures. Püsiliited ei ole lahti monteeritavad. Demonteeritavaid liiteid saab korduvalt lahti võtta ja kokku ühendada. Keevisliide ühendab elemendid keevisõmbluse abil. Keevitamisel sulatatakse detailide ühenduskohta metalli (või muud materjali). Tekkiva sulami ja metalli hangumisel saadakse detailide liitekohas püsiv ühendus. Neetliite teostamise oluliseks detailiks on neet ja olemasolevad kanalid (pesad). Neetliidet kasutatakse kohtades, kus ei ole võimalik teostada kuumutamist. Demonteeritavate (taasavatavate) liidete tüüpnäide on keermesliited, mis saadakse poltide ja mutrite või tikkpoltide ja korpuses olevate keermete abil. Piimatööstuse masinates leidub rohkesti keermesliiteid. Masinavõllide ja rataste ühendamiseks sobivad hästi ...
alternatiiv kavandatud tegevusest erinev viis sama vajaduse rahuldamiseks arendaja isik, kes kavandab tegevust ning soovib seda ellu viia bioakumulatsioon kahjulike ainete kogunemine organismi bioakumulatsioonitegur organismi ja keskkonna kemikaalisisalduse erinevust kirjeldav suhtarv ekspert või eksperdigrupp isik või isikute grupp, kellel on teatava keskkonnamõju hindamiseks vajalik kvalifikatsioon. Eestis peab keskkonnamõju hindamise ekspert tegutsemisõguse saamiseks taotlema keskkonnaministrilt tegevuslitsentsi. Ekspertgruppi võvad kuuluda ka litsentsita isikud, kes nõstavad eksperte mingis spetsiifilises valdkonnas eksponeeritus mõjuri ja sihtobjekti kokkupuude või sihtobjekti avatus mõjuri tekitatud kaudsele toimele eksponeerituse hindamine kontseptuaalse mudeli stsenaariumidel tuginev, võimalust mööda kvantitatiivne analüüs eksponeerituse iseloomustamiseks, mis lõpeb eksponeerituse koondkirjelduse koostamisega ekspo...
Põltsamaa Ametikool Jõuülekanne A3 Alvar Müür Kaarlimõisa 2010 1. Hammasülekanded 1.1 Eelised ja puudused · Eelised- kõrge kasutegur (kuni 98%). · väikesed mõõtmed (võrreldes hõõrd- ja rihmülekandega). · konstantne ülekandearv. · suur ülekantav võimsus (kümneid tuhandeid kilovatte) · võllide ja laagrite väike koormus. · eriseadmete vajadus hammaste lõikamiseks. · võimatu muuta ülekandearvu sujuvalt. · valmistamise ebatäpsusest tingitud müra. 1.2 Liigid Hammasülekannete liigitus telgede vastastikuse asendi järgi- · silinderhammasülekanded · koonushammasülekanded · hüpoidülekanded · hammaslattülekanded · kruvihammasülekanded Hammasülekannete liigitus hammaste paiknemise järgi ratta moodustaja suhtes- · sirghammastega · noolhammastega · kaldhammastega · kõverjooneliste hammastega Hamba kuju järgi- · evolventprofiiliga · tsükloidprofiiliga · r...
3.ANDURID JA NENDE MÕÕTEPRINTSIIBID. 3.1.Andurite definitsioon ja liigitus. Anduritele esitatavad nõuded, ideaalkarakteristikud. Andur on automaatsüsteemi osa, mis muundab kontrollitava suuruse mõõtmiseks, edastamiseks, säilitamiseks, registreerimiseks, võimendamiseks või juhitavasse seadmesse suunamiseks sobivasse vormi (optiliseks, mehaaniliseks või elektriliseks signaaliks). Andur koosneb tavaliselt tajurist (esmamuundurist) ja ühest või mitmest vahemuundurist. Mõnel juhul moodustab anduri ainult tajur (nt. termopaar, takistustermomeetri andur). Joonisel 0.2.1 on toodud tüüpilise anduri plokkskeem. Andurid liigitatakse füüsikalise tööpõhimõtte järgi: 1. elektrisuuruste muutusel põhinevad andurid : induktiivandurid, mahtuvusandurid, takistusandurid; 2. optilised, kasutavad elektrimagnetilisi protsesse lainepikkustel üle 10¹² Hz.; 3. mehaanilised, kasutavad tahkete kehade liikumist; 4. hüdraulilised, kasutavad vedelike mehaan...
Trafod e transformaatorid Pöörlemissageduse reguleerimine on suhteliselt raske. On kasutusel erineva pöörlmissagedusega Seadmed vahelduvvoolu muundamiseks põhiliselt pinge tõstmiseks või mootoreid (lülitatakse ümber), parim viis on kasutada sagedusmuundurit (kallis). Pöörlemissuuna alandamiseks. Võimalik on ka sagedust ja baaside arvu muuta. Nt muudavad muutmiseks tuleb vahetada faasijuhtmed omavahel ära. ülekandeliini kõrgepinge tarvititele sobivaks 220V pingeks. Põhineb elektromagnetilisel induktsioonil. Võnkering Lihtsaim trafo koosneb eletrotehnilise terase lehtedest koostatud südamikust ja Koosneb poolist ja kondensaatorist. Kasutatakse kõrgsageduslike võnkumiste genereerimiseks. primaar(rakendatakse trafole antav vahelduvpinge) ja sekundaarmähisest(millelt 1) kondensaatorid saab kohe...
TALLINNA POLÜTEHNIKUM Päevane osakond ELEKTRIMOOTORI KIIRUSE AUTOMAATREGULEERIMISE SÜSTEEM Kursusetöö Õppeaine automaatreguleerimine Juhendaja: V. Purro Konsultant: V. Purro Tallinn 2010 2 Sisukord KURSUSETÖÖ ÜLESANNE..............................................................................................3 KURSUSETÖÖ ANDMED................................................................................................. 4 Sissejuhatus.......................................................................................................................... 6 2. SÜSTEEMI FUNK...
VIII ELEKTROMAGNETVÕNKUMISED. ELEKTROMAGNETLAINED. 1. Elektromagnetvõnkumised a) Mõiste: emv-ks nimetatakse laengu, voolutugevuse ja pinge perioodilist muutumist Elektromagnetvõnkumised jagunevad: Vabad elektromagnetvõnkumised Sunnitud magnetvõnkumised b) Võnkering süsteem, milles toimuvad vabad emv. Koosneb poolist ja kondensaatorist. Võnkeringi joonis. C kondensaatori mahtuvus L pooli induktiivsus c) Thomsoni valem - saab arvutada võnkumiste perioodi võnkeringis. T= T- võnkumiste periood [s] ; L- induktiivsus [H] ; C- mahtuvus [F] d) Vahelduvvool sunnitud emv, mille puhul voolutugevus muutub ajas harmooniliselt. Vahelduvvoolu tekitakse generaatorite abil. Generaatori põhiosad: Magnetväljas pöörlev juhtme keerd indutseeritakse emj Püsimagnet tekit...
ELEKTROONIKA 2003 KORDAMISKÜSIMUSED 1. ÜLDOSA....................................................................................................................1 1.1.Elektroonika ajaloo põhietapid.............................................................................1 1.2.Mis on elektronlamp.............................................................................................2 1.3.Elektronkiiretoru.................................................................................................. 2 1.4.Mis on võimendi...................................................................................................2 1.5.Analoog ja digitaalelektroonika erinevus..........................................................3 1.6.Elektroonika passiivkomponendid..........................................................................
1. Releekaitse toimimispõhimõtted(tunnussuurus, põhi-reservkaitse, üle-alakaitse, hetk-viitekaitse. Tunnussuurus on füüs. suurus millele releekaitse mõõteosa reageerib. Jagatakse: elektrilised, el suuruse funktsioonid, el. suuruste erinevus, mitteelektrilised. Ahela reservkaitse saab mõõtetulemused sama ahela trafodest, AJ oma sama AJ omadest, kaugreservkaitse erinevast AJ-st. 2. Releekaitse toimimispõhimõtted (absol. ja suht. selektiivsus, hõlmatavus, töökindlus, tõrked). Abs. selektiivsusega on kaitse, mis võrdleb el. suurust mõlemas otsas (pikidif-, võrdluskaitse). Vajab toimimiseks sidekanalit. Üldjuhul üheastmeline Suht. sel. võrdleb suurusi ühes otsas ja on tihti mitmeastmeline (voolu-, dist. kaitse). Hõlmatavus- kaitse peab haarama kõiki elektrivõrgu seadmeid. Tundlikkus- kaitse võime reageerida võimalikult väiksele muutusele. 3. Rekeejautse toimimispõhimõtted (elemendi- ja süste...
Tallinna Polütehnikum Raadiovastuvõtjad konspekt Raadiovastuvõtjad Kirjandus 1. A, Isotamm “Raadiovastuvõtuseadmed”, 1968 2. “Raadioamatööri käsiraamat 3. L, Abo “Raadiolülitused” Raadioülekandeks kasutatavad sagedusalad Raadiosagedusliku spektri jaotus Sagedusala Sagedusala Laineala Laineala nimetus Tähis ulatus nimetus ulatus 3...30 kHz Väga madalad 100...10 km Ülipikklained ÜPL raadiosagedused 30...300 kHz Madalad 10...1 km Pikklained PL raadiosagedused 300...3000kHz Keskmised 1000....100 m Kesklained KL raadiosagedused 3...30 MHz Kõrged 100...10 m Lühilained LL raadiosagedused 30...300 MHz ...
tulevad baasiahelast ja moodustavad baasivoolu IB. IEp = IKp + IBp ; = IKp/IEp ülekandetegur (0,996), näitab, palju auke on jõudnud kollektorini. . 29 Bipolaartransistor vooluga tüüritav seadis! Välispingete eesmärk on organiseerida transiitne laengukandjate voog. Vooluülekandetegur = IKp/IE = (IEp/IE)·(IKp/IEp) = Kuna kollektorsiire on vastupingestatud, tekib vastuvool IK0, mis sõltub temperatuurist. IK0 soojuslik vool. IB = IEn + IBp IK0 IE = IK + IB IK = IE + IK0 IB = (1 )IE IK0 ÜB lülitus 30 ÜE lülitus. 1 IK = IB + I Ko = I B + (1 + )I K 0 1- 1-
Rubiinlaser Peremeeskeskkond: safiir (Al2O3, anisotroopne dielektrik), dopeeritakse Cr2O3 (0,05 kaaluprotsenti). Lainepikkused: 694,3 nm & 692,9 nm A21 = 333 s-1, 2 = 3 ms, 21 = 2,5E-20 cm2 = 3,3E11 s-1 Nõrga signaali võimendus 0,2 cm-1 Optiline pumpamine: neeldumisribad 404 & 554 nm, = 50 nm (4A24F2, 4F1) Rubiinlaser, selle töö ja ehitus Pööratud jaotuse põhimõte realiseeriti esmakordselt rubiinlaseris (praegu kõige levinumad laserid), sünteetilisest rubiinist kristallvardas, millele on valmistamise ajal lisatud tühine hulk kroomi. Rubiin on alumiiniumoksiidi kristall teatud lisandiga, mis tingib tema suurepärase värvuse. Safiir on sama kristall, ainult teise lisandiga. Neid kristalle osatakse nüüd tehislikult valmistada pikkade varraste kujul, mille kristallivõre on väga hea kvaliteediga. Puhas, lisanditeta alumiiniumoksiidi kristall on värvitu ja läbipaistev. Kui kasvatamise ajal lisada talle veidi titaani, omandab kristall he...
[vaata | 1. Füüsikaliste suuruste mõisted, definitsioonid ja ühikud muuda] Voolu töö ja võimsus. Joule-Lenzi seadus. Potentsiaal ja pinge. Elektriväli, suund ja tugevus. Voolu tugevus ja tihedus. Takistus, selle sõltuvus juhi mõõtmetest. Eritakistus. Laeng ja mahtuvus. Induktiivsus. Vooliuallika elektromotoorjõud, lühisvool ja sisetakistus. Voolu töö ja võimsus. Voolu töö on võrdeline voolutugevusega I, pingega U juhi otstel ja ajaga t. [ J ] Võimsus on ajaühikus tehtud töö. [ W ] A p= t Joule-Lenzi seadus. Joule-Lenzi seadus : elektrivoolu toimel juhis eralduv soojushulk Q on võrdeline voolutugevuse I ruuduga, juhi takistusega R ja voolu kestusega t ning ku...
Juhtimine ja automaatjuhtimine.Küberneetika? Juhtimiseks nim mingi saada tajureid, mille mahtuvus C on lineaarses sõltuvuses paagis oleva vedeliku masina või protsessi mõjutamist, nii et selle töö annaks soovitatud tulemuse. ruumalast V, s. t. C = c V, kus c on tajuri erimahtuvus Juhtida võib inimene või masin ise. Käsitsijuhtimise korral on kõik Induktiivtajurid?-Induktiivtajuriteks nimetatakse suurt rühma tajureid, kus juhtimisfunksioonid usaldatud inimesele. Automatiseeritud juhtimisel on need sisendsuuruse (deformatsiooni, nihke, jõu, momendi) muutus põhjustab jaotatud inimese ja automaatide vahel. Automaadid täidavad funksioone ,mida elektromagnetilise süsteemi induktiivsuse muutumist. Lugedes suhteliselt inimene pole füüsiliselt võimeline täitma, või pole inimesle vastuvõetavamad. väikese õhupiluga ferromagnetilises süsteemis puistevoo tühiseks, võib mäh...
Piimatööstuse üldseadmed (kordamisküsimused 2009) 1. Püsi- ja demonteeritavad liited. Keevisliide, neetliide ja keermesliide, hammasliide, kiilliide, (aku)klemmliide 2. Võllid, teljed ja sidurid. Telg jäik, ei liigu. Võll laagritel. Sidur- silinder, mis ühendab kahte võlli nt jäigalt kiiludega. 3. Hüdroajami (hüdromootori) tööpõhimõte: elektripump, ventiil, vedelik(õli) hüdromootor (turbiin), õlimahuti, pump... Ventiili abil hea regul. Pöörlemiskiirust. 4. Ülekanded: regul. Pöörlemiskiirust, suurend-vähend jõumomenti. Hõõrdetakistus, kasutegur,veere-liug(material) laagrid, määrimine. Kiilrihm-hammas-kett-tigu. N=R/r 5. Hammas- ja tiguülekanne. Vedav ja veetav ratas(latt) hambuvad igal ajahetkel hamba pinnaga risti paiknevas tasandis- evolventprofiil (vältimaks hõõrdumist ja hambaid murdvat pinget). Tiguülekandel suurem ülekandetegur 6. Reduktorid: mitmeastmeline hammas-tigu- ülekanne. Vedavad ja veetavad võllid võivad olla varustatud ...
Kontrolltöö nr.1D 1.Põhimõisted (defineeri): Andur. Tajur. Reguleeriv organ. Võimendi. Täitur. Andur on automaatsüsteemi osa, mis muundab kontrollitava füüsikalise suuruse (parameetri) teiseks suuruseks, mida on parem võimendada, mõõta või juhtimiseks kasutada. Tajur on välistoimele tundlik ning sellele vahetult reageeriv anduri osa Reguleeriv organ element, mis vahetult mõjub reguleerimisobjektile reguleeritava suuruse hoidmiseks nõutud tasemel. Võimendi on seade milles teostatakse sisendsignaali võimsuse suurendamine välise energiaallika abil. Täitur on regulaatori element, mis läbi anduri ja võimendi tulevale signaalile (korraldusele) reageeri. Selleks võib olla elektri-, hüdro-, või pneumomootor, solenoidventiil, kraan, siiber jne. 2. Automaatsüsteemide klassifikatsioon (defineeri): Automaatsignalisatsioonisüsteemid (ASS). Laeva automaatikaseadmed klassifitseeritakse: A. Otstarbe järgi: ...
1. Kirjeldada magnetelektrilise, elektromagnetilise ja elektrodünaamilise mõõteriista ehitust ning tööpõhimõtet. 2. Milline on volt- ja ampermeetri sisetakistus ning kuidas ühendatakse need mõõteriistad vooluringi? 3. Kirjeldada ampermeetri lülitust voolutrafoga ja -sundiga. 200 4. Mida tähendab ampermeetrile märgitud tingtähis 5 ja mille poolest erineb selle ampermeetri lülitus ilma sellise tähistuseta mõõteriista omast? Missuguseks kujuneb selle ampermeetri mõõtepiirkond voolutrafota lülitamisel? 5. Kuidas muutub ampermeetri mõõtepiirkond, kui valida talle teistsuguse nimivooluga sunt, kuid millel on endine nimipingelang? Missuguseid mähiseid sisaldab vattmeetri mõõtesüsteem ning kuidas need lülitatakse vooluringi? 6. Mida tähendavad vattmeetril tärnikestega tähistatud klemmid ja kuidas neid arvestada vattmeetri lülituse koostamisel? 7. Kuidas laiendataks...
voolukandjaid, kollektor kogub, baas reguleerib. Planetaartehnoloogia K(n), selle sees B(p) kanal, mille sees E(n) kanal. baasi paksus 1um. Võimendus võimsuse järgi, mitte voolu. PNP trans pingestamata nagu 2 dioodi: baasi kohal pot 0, dün tasakaal: p-n siirdeid läbivad Jdif=Jtr. =IEp/IE-injektsiooni tegur 0,995. El-de rekomb tulevad baasiahelast ja moodustavad baasivoolu. Välispingete eesmärk tagada transiitne laengukandjate voog. Vooluülekandetegur =IKp/IE=. Kuna kollektori siire vastupinges, siis vastuvool IKo-soojuslik IB=IEn+IBp-IKo. !! IE=IK+IB | IK=IE+IKo | IB=(1-)IE-IKo!! Lülitused ÜE,ÜB,ÜK- emitterjärgur 2. PTS tõstab võimendustegurit, aga kaotab stabiilsuses. Vaja näiteks generaatoris, PTS vähendab Rsists=Rsis*K/Kts, suurendab Rvaljts=Rvalj*Kts/K. PTS-ga komparaator (Schmitti trigger). Sagedusriba kitseneb 3. . Rakendamis pinge Ur=Utg+(U+valjmax-Utg)/(R1+R2)*R1, lahti laskmine Ull=Utg-(U-
Tallinna Polütehnikum Energeetika õppesuund Rein Kask ELEKTRIAJAMITE JUHTIMINE Õppevahend TPT energeetika õppesuuna õpilastele Tallinn, 2007 Saateks Erialaainete õpikute ja muude õppevahendite krooniline puudus on juba palju aastaid raskendanud kutsehariduskoolide õpilastel omandada erialaseid teadmisi. Käesolev kirjatöö püüab mingilgi määral leevendada seda olukorda Tallinna Polütehnikumi energeetika õppesuuna õpilastele sellise õppeaine kui ,,Elektriajamite juhtimine" õppimisel. Elektriajamid on üheks põhiliseks elektritarvitite liigiks ja neid kasutatakse laialdaselt kõikides eluvaldkondades. On selge, et tulevased elektriala spetsialistid peavad neid hästi tundma ja oskama neid ka juhtida. Elektriajamite juhtimine ongi valdkonnaks, mida käsitleb käesolev õppevahend. Selle koostamisel on autor lähtunud põhimõttest selgitada probleeme nii põhjalikult kui vajalik ja nii napilt kui võimalik ...
Soojusautomaatika eksamiküsimuste vastused 1. Põhimõisted automatiseeritud tootmise alalt. Automaatikasüsteemide klassifikatsioon nende otstarbe järgi. Näited. Automatiseeritud tootmise põhimõisted: 1. Objekt 2. Regulaator 1. Andur 2. Tajur 3. Automaatikasüsteem Automaatikasüsteemide klassifikatsioon otstarbe järgi: 1. Automaatreguleerimise süsteemid (ARS) 2. Distantsioonjuhtimise süsteemid (DJS) 3. Tehnoloogilise kaitse süsteemid 4. Automaatblokeeringu süsteemid (ABS) 5. Reservseadme automaatse käivitamise süsteem (RAKS) 6. Automaatsed tehnoloogilise kontrolli süsteemid (ATKS) 7. Signalisatsioonisüsteemid (SS) valgus ja helisüsteemid 1. Tehnoloogiline SS andmed seadmete töö ja üksikute parameetrite kohta 2. Avarii SS teatavad võimalikest avariilistest olukordadest ja juba tekkinud avariidest 3. tsentraalsed SS on ette nähtud signalisatsioonisüste...
Float state "ujuv potentsiaal". Kasutatakse seal, kus on Välispingete eesmärk tagada transiitne rakendatud siinisüsteem. Kui mõlemad puhvrid korraga hakkavad saatma andmeid andmesiinile, laengukandjate voog. tekib siinikonflikt (üks saadab "1" ja teine "0"). See on lubamatu. Kõik puhvrid peale ühe peavad Vooluülekandetegur =IKp/IE= . Kuna olema HiZ olekus. Ainult üks saab töötada info edastamise reziimis. Missugune nendest? Seda kollektori siire vastupinges, siis määrab keskne kontroller (arbiter) aadr.siini kaudu läbi aadressi desifraatori. Aadressi desifraator vastuvool IKo-soojuslik IB=IEn+IBp-IKo. !
jõua baasi elektroodini vaid sisenevad kollektorsiirdesse Seal aga valitseb el.väli, mis suunab nad kollektorisse Seega jaguneb emittervool Ie Baasivooluks IB ja kollektorvooluks Ic IE = I C + I B TÖÖ - Aladid, sild alaldid (skeemid ) pinge voolu graafikud, stabilisaatorid, arvutus, operatsioonvõimendid, kasutus, rakendus, parameetridega. IB on palju väiksem kui iC Baasivool moodustav kollektorvoolust 1-8% IC on peaaegu võrdne IE Vooluülekandetegur IK = * IE kus = 0,92....0,99 Avasuunareziim 1.Kui emittersiirde päripingestamise olukorras (transistori norm. Tööreziim), Rakendada emitteri ja baasi vahele lisaks alalispingele ka vahelduv sisenpinge, siis tekitavad väiksesed sisendpinge muutused suhteliselt suuri emittervoolu muutuseid. 2.Peaegu sama suured voolumuutused kanduvad üle ka kollektorvoolule, kuna vooluülekandetegur = ... 1 3.Kollektorringi takistus on aga suur, kuna kollektorsiire on vastupingestatud .
Pilet 1. 1. Valgusdioodid Valgusdiood on pn-siirdega diood, mis muudab elektrienergiat optiliseks kiirguseks tavaliselt spektri nähtavas või infrapunases osas. Teatud ainete kristallis moodustatud pn-siirde päripingestamisel (pluss p-kihil) injekteeruvad augud n-kihti ning elektronid vastassuunas. Need injekteerunud augud ja elektronid rekombineeruvad pn-siirdes ja selle läheduses vastasmärgiliste laengukandjatega ning osa vabanevast energiast eraldub kiirgusena. Kuna p-kiht on kõigest mõne mikromeetri paksune, siis väljub kiirgus kristallist. Kiirguse värvuse määrab pooljuhtmaterjali koostis. Toodetakse ka kahevärvilise kiirgusega valgusdioode. Nendel on tavaliselt kaks eri materjalist siiret ja kolm viiku. Siirdeid läbivate voolude muutmise teel saab siis valida mitmeid värvivarjundeid, näiteks punase ja rohelise korral punakaskollasest kollakasroheliseni. Valgusdioode valmistatakse peamiselt galliumarseniid-fosfiidist. Valguse lainep...
Tallinna Tehnikaülikool Keemia- ja materjalitehnoloogia teaduskond Keemiatehnikainstituut Ainetöö reaktsiooniprotsessidest Pöörduv reaktsioon membraanreaktoris Üliõpilane: Marija Gnatjuk Juhendaja: Enn Tali Kaitsud: Tallinn 2013 a. Sisukord Sisukord....................................................................................................................................... 2 1.Tähiste ja lühendite loetelu....................................................................................................... 3 2.Sissejuhatus............................................................................................................................. 4 2.1 Membraanreaktor.......................................................................................
Kordamisküsimused 1. Siinuskõveraid iseloomustavad suurused 2. Siinusvoolu hetkväärtus, efektiivväärtus ja amplituudväärtus. 3. Võimsustegur ja selle parendamine. Seda, kui suure osa moodustab aktiivvõimsus näivvõimsusest, näitab võimsustegur P cos = . S 4. Resonantsinähtus elektriahelates. Kui induktiiv- ja mahtuvustakistused on võrdsed. 5. Vahelduvvoolu võimsus. Vahelduvvoolu tugevuse efektiivväärtuseks nimetatakse sellise alalisvoolu tugevust, mille korral aktiivtakistusel eraldub vaadeldava vahelduvvooluga võrreldes ühesugune võimsus. Aktiivvõimsuseks nimetatakse vahelduvvooluahelas aktiivtakistusel eralduvat võimsust. 6. Magnetväli. Magnetvaljaga on tegemist pusimagneteid ja vooluga juhet umbritsevas keskkonnas. Magnetvalja kujutatakse magnetvalja joujoontega, mis on alati kinnised. Pusimagnetite ja ka elektromagnetite puhul on magnetvalja joujooned suunatud valjaspool magnetit pohjast lounasse ja sees vastup...
1. Alalisvooluringide omadused.- Vooluring koosneb 3: toiteallikas, tarbija e koormus ja ühendusjuhtmed. Vooluringi graafilist kujutist nim skeemiks. Vooluringi osa, kus vool on ühe ja sama väärtusega nim haruks (3 või enam haru). Kalbaanilist ühenduskohta nim sõlmeks. Kui vooluringis oleva elemendi pinge ja vooluline sõltuvus on lineaarne, siis nim selliseid elemente sisaldavaid vooluringe lin vooluringideks. Kui sõltuvus ei ole lineaarne, siis on tegemist mittelin vooluringiga. Kui vooluringivool ei muutu aja jooksul suuruselt ega suunalt nim seda vooluringi alalisvooluringiks. Suletud vooluringis eks vool, kui eks potensiaalide vahe ehk pingeallika klemm. Vool kulgeb vooluringis kõrgemalt madalamale potensiaalile 2. Alalisvooluringide arvutamine Ohmi ja Kirchhoffi seaduste alusel. OHMi seadus: I = U/R (vool juhtmes võrdeline pingega tema otstel ja pöördvõrdeline juhtme takistusega). Kirchho...
Elektrotehnika kordamisküsimused: 1. Milliseid eeliseid annab elektrotehnika tundmine insenerile? See annab oskusi muundada looduslikku energiat ning oskusi saada ja edastada elektrilist informatsiooni. Elektrotehnilised seadmed annavad võimaluse tootmist kompleksselt automatiseerida ning võtta kasutusele tehnoloogiaid, mille rakendamine näiteks kõrge temperatuuri, rõhu või ohtliku kiirguse tõttu oleks muidu võimatu. Elektronarvutite abil saab töödelda ning salvestada informatsiooni. Elekter on meie igapäevaelu vältimatu osa. 2. Milliseid eeliseid annab elektroonika tundmine insenerile? Elektroonika tundmine annab oskuse käsitleda keskmise ning suure võimsusega seadmeid, mille ülesandeks on ühe vooluliigi muundamine teiseks. Neid muundussüsteeme kasutatakse värviliste metallide elektrolüüsil, elektertranspordis, tõstemasinates, elektriajamites ning energia alalisvoolu ülekandel suurtele kaugustele. 3. Kes peaks olema õppimi...
Du BE Pikkov lk 64 Siin vaadeldakse transistori ÜE-lülituse lihtsat aseskeemi ja tuletatakse valem lülituse pingevõimendusteguri arvutamiseks. h11E ja h21E on nn hübriidparameetrid (transistori kui neliklemmi parameetrid h- parameetrite süsteemis). Need võetakse transistori spetsifikatsioonist või vajaduse korral mõõdetakse. h11E on transistori sisendtakistus ja h21E tema vooluülekandetegur (tuntud ka kui b » IK / IB). RK» tähistab koormustakistust vahelduvvoolule; see võrdub kollektortakisti RK ja koormustakistuse Rt paralleelühenduse takistusega (tähistatakse kui RK|| Rt). Elektroonika alused. Teema 3 Pooljuhtseadised 9 Tabel 6.1. ÜE-lülituse ligikaudsed arvutusvalemid ja orienteerivad väärtused [3]
Mehaanika. 1. Elastsusjõud. Hooke seadus Elastsusjõud esineb kehade deformeerimisel ja on vastassuunaline deformeeriva jõuga. Hooke'i seadus: Väikestel deformatsioonidel on elastsusjõud võrdeline keha deformatsiooniga. F e = -k l k-jäikus l-keha pikenemine 2. Raskuskese on punkt, mida läbib keha osakestele mõjuvate raskusjõudude resultandi mõjusirge keha igasuguse asendi korral Punktmass on keha, mille mõõtmeid antud liikumistingimustes ei tule arvestada. 3.Kulgliikumise korral liiguvad keha kõik punktid ühtemoodi (läbivad sama aja jooksul sama teepikkuse) 4. Nihe. Nihke ja lõppkiiruse võrrand. Nihe on suunatud sirglõik, mis ühendab keha algasukoha lõppasukohaga. x =Vot + at2/2; v=vo+at 5.Taustsüsteem koosneb taustkehast, koordinaatsüsteemist ja kellast. Keha kiirus on suhteline: keha kiirus sõltub selle taustsüsteemi valikust, mille suhtes kiirust mõõdetakse. Tavaliselt valitakse taustsüsteemiks maapind. 6. Hõõrdejõud- jõudu, mis tekib...
Kordamisküsimused 1. Mis on Ohmi seadus? U=R*I 2. Mis on pingejagur? Etteantud parameetritega pingejaguri arvutamine. Pingejagur – alalis- või vahelduvpinget osadeks jagav elektriseade. 3. Elektriahela võimsus. U2 2 P=U∗I = =I ∗R R 4. Edissoni efekti olemus? 5. Elektronlambid (diood, triood, tetrood …) ja nende tööpõhimõte? diood ‒ kahe elektroodiga (katood, anood); triood ‒ kolme elektroodiga (katood, võre, anood); pentood ‒ viie elektroodiga (katood, tüürvõre, varivõre, sulgvõre, anood). Tetrood – nelja kanaliga Dioodi tööpõhimõte Töötamisel lastakse vool läbi nikroomist hõõgniidi, mis kuumutab katoodi 800...1000 °C kraadini. Kuum katood eraldab elektrone vaakumisse, protsess, mida nimetatakse termoemissiooniks. Katood on kaetud leelismuldmetalli (nt.baarium või strontsium) oksiidiga, millest elektronid väljuvad suhteliselt kerg...
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi ...
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaa...
1.Alalisvooluringi seadused.Voouring koosneb: 1) toiteallikas; 2) tarbija e koormus: 3) ühendusjuhtmed. Faasirootoriga asünkr. Lühisrootoriga, kahe- ja ühefaasilised asünkroonmootorid. Graafilist kujutist nim skeemiks. Vooluring kus vool on ühe ja sama väärtuseks nim haruks. 3 või enama haru Asünkroonmootori ehitus: staator(koosneb välisest teraskerest, millesse on pressitud uuretega kalvaanilist ühenduskohta nim sõlmeks. Kui pinge ja vooluvaheline sõltuvus on lineaarne siis nim staatorisüdamik, mis koostatakse stantsitud terasplekist), rootor(koosneb terasplekkidest on mähitud) lineaarseteks vooluringiks. Suletud vooluringis eksisteerib vool kui eksisteerib potentsiaalide vahe e pinge 19. Asünkroonmootori tööpõhimõte- Töö põhineb pöördmagnetvälja ja rootori voolu vastastikusel toimel. alikate klemmidel. Vool kulgeb vooluringis alati kõrgemalt madalamale potensiaalile. Tarbijate koormust ...
Rakenduselektroonika 1. Võimendid 1.1. Võimendite liigid ja neid iseloomustavad parameetrid Võimendiks nimetatakse seadet mille abil toimub signaali amplituudi suurendamine võimalikult väikeste signaali kuju moonutustega. E + Usis Võimendi Uvälj Joon.1.1 Võimendil on alati kaks sisend-, kaks väljundklemmi ja temaga peab olema ühendatud alati energiaallikaks olev alalispinge allikas (joon.1.1). Sisendklemmidega ühendatakse signaaliallikas mille signaal vajab võimendamist. Väljundklemmidega aga ühendatakse see tarbija, millele antakse võimendatud signaal, milleks võib olla kas valjuhääldi, mingi relee mähis, mingi täiturmehhanismi juhtmähis jne. Nimetatud objektid on elektriliselt vaadeldavad takistustena ja seepärast me räägime üldistatult võimendi koormu...
3.VASTUVÕTJA INFORMATIIVNE TRAKT- Informatiivse trakti struktuur sõltub: projekteerimise lähteandmetest (mida on eelnevalt teada signaalist, müradest), optimaalsuskriteeriumitest. kirjanduses on palju tuntud optimaalseid lahendusi teatud tüüpsituatsioonide kohta. Samas on need tüüpsituatsioonid suhteliselt lihtsad ning ei pruugi tegelike vajadustega kokku langeda. sellegipoolest taandub informatiivse trakti optimaalse projekteerimise lähtelahendused suurel määral lihtsustatud optimaalsete tüüpstruktuuride leidmisele. Informatsioonitraktis lahendatakse klassikalisi signaalitöötluse ülesandeid, milledeks on mürade, häirete taustal oleva signaali:Demodulatsioon (detekteerimine);Regeneratsioon (signaali taastamine tavaliselt impulss-kood modulatsiooni korral; Otsimine (sageduse, amplituudi, modulatsiooni liigi, faasi järgi); Avastamine; Sünkronisatsioon (sageduse, faasi, kandevlaine viiteaja, alamkandesageduse, taktsageduse, koodi järjest...
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut BORIS GORDON, EDUARD PETLENKOV ISS0010 SÜSTEEMITEOORIA ÜLESANNETE KOGU 2007 Parandatud 2009 Kaane kujundanud Ann Gornischeff Autoriõigus: B. Gordon, E. Petlenkov, 2007 ISBN 978-9985-59-688-3 2 EESSÕNA Käesolev ülesannete kogu on mõeldud kasutamiseks abimaterjalina õppeaines ISS0010 Süsteemiteooria. Kogu täiendab Hanno Sillamaa õpikut "Süsteemiteooria", millel on olnud juba neli trükki. Iga peatüki alguses on toodud viide selle õpiku (Hanno Sillamaa. Süsteemiteooria, TTÜ kirjastus) vastavatele teoreetilistele peatükkidele. Kui selles õpikus vastavat materjali ei ole, siis on antud viide teisele raamatule (K. Ogata. Modern control engineering, 2002). Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval- mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teor...
Skeemitehnika. SS-98. 1. M.Tooley “Everyday electronics data book” 2. Hessin “Impulsstehnika” 3. Horowits “The art of electronics” Skeemitehnika põhilised mõõtühikud Nimetus Tähistus Sümbol Kirjeldus Amper A I Voolutugevus juhtmes on 1A, kui juhtme ristlõiget läbib elektrilaeng 1 kulon 1. sekundi jooksul Kulon C Q Elektrilise laengu ühik e. Elektrihulk Farad F C Mahtuvus on 1F, kui potensiaalide vahe 1V tekitab mahtuvuse elektroodidel laengu. Henry H L Induktiivsus on 1H, kui voolumuutus kiirusega 1A sekundis tekitab induktiivsusel pinge 1V. Jaul J E Energiaühik. Oom R Takistuseühik. Siemens S G Juhtivuseühik. Sekund s...