1. Alalisvooluringide omadused.-
Vooluring koosneb 3:
toiteallikas , tarbija e koormus ja ühendusjuhtmed. Vooluringi graafilist kujutist nim skeemiks. Vooluringi osa, kus vool on ühe ja sama väärtusega nim haruks (3 või enam haru). Kalbaanilist ühenduskohta nim sõlmeks. Kui vooluringis oleva elemendi pinge ja
vooluline sõltuvus on lineaarne, siis nim selliseid elemente sisaldavaid vooluringe lin vooluringideks. Kui sõltuvus ei ole lineaarne, siis on tegemist mittelin vooluringiga. Kui vooluringivool ei muutu aja jooksul suuruselt ega suunalt nim seda vooluringi alalisvooluringiks. Suletud vooluringis eks vool, kui eks potensiaalide vahe ehk pingeallika klemm. Vool kulgeb vooluringis kõrgemalt madalamale potensiaalile 2. Alalisvooluringide arvutamine Ohmi ja
Kirchhoffi seaduste alusel. OHMi seadus: I = U/R (vool
juhtmes võrdeline pingega tema otstel ja pöördvõrdeline juhtme takistusega). Kirchhoffi I seadus: Hargnemispunkti suunduvate voolude summa on võrdne sealt väljuvate voolude
summaga I1+I2 = I3+I4+I5. Kirchhoffi II seadus: Igas kinnises vooluringis on elektromotoorjõudude algeline summa (Ek) võrdne kõikidel takistitel tekkivate pingelaengutega algebralise summaga (Ik*Rk)- Ek = Ik*Rk 3. Vahelduvvoolu väärtused.
Muutuva suuruse väärtus mingil hetkel nimetatakse hetkväärtuseks.
Keskväärtus-määratakse poolperjoodi kohta, kuna terves perjoodis võrdub nulliga, vahelduvvoolu keskväärtus
on võrdne siinuskõvera poolperjoodi ja aja telje vahele jääva pinnaga. Efektiivväärtus on võrdne sellise
alalisvoolu
tugevusega , mis läbides sama takistust mis vahelduvvoolgi, eraldab selles perioodi kestel sama
soojushulga. 4.
Aktiiv -,
induktiiv - ja mahtuvustakistuse jadalülitus.
Pingeresonants . Olukorda, mil vooluring sisaldab küll reaktiivtakistusi, kuid vool on faasis rakendatud pingega
nimetatakse resonantsiks. Resonantsi iseloomustatakse sagedustunnusjoontega (e. -karakteristikutega).
Kui vooluringi reaktiivtakistuste xL = xC suurused resonantsis ületavad takistuse r suuruse, siis
pinged UL ja
UC, mis on võrdsed ja vastassuunalised, võivad olla tunduvalt suuremad
pingest U, s.o. klemmipingest. Seetõttu
nimetataksegi resonantsi jadaühenduse puhul pingeresonantsiks. 5. Aktiiv-, induktiiv- ja mahtuvustakistuse rööplülitus.
Vooluresonants .
Kuna vooluringi hargnemata osa
voolI on kolme voolu geomeetriline summa, millest kaks IL ja IC on resonantsi
puhul võrdsed ja vastassuunalised, siis võivad resonantsi korral olla,
voolud induktiivsusel ja mahtuvusel
märgatavalt suuremad vooluringi summaarsest voolust I. Seetõttu nimetataksegi resonantsi rööpühenduse puhul
vooluresonantsiks. 6. Võimsused
vahelduvvooluringis .
Vahelduvvool- perioodiliselt muutuv vool, mille väärtused korduvad kindla ajavahemiku järel. 7. Kolmefaasiliste vooluringide tähtühendus.
Tähtühenduse saamiseks ühendatakse mähiste lõpud ühte ühisesse punkti ehk sõlme N. Samasuguse sõlme N1
moodustab tarbija ehk koormuse kolme faasi ühendamine. Kahte sõlme N ja N1 ühendavat
juhet läbib vool, mis
on võrdne süsteemi kolme eri faasi voolude algebralise summaga s.o. vool neid kahte sõlme N ja N1 ühendavas
juhtmes on võrdne nulliga; seetõttu nimetataksegi seda juhet neutraaljuhtmeks. Sõlme, mida moodustavad
generaatori mähiste lõpud või tarbija
faaside lõpud, nimetatakse neutraalpunktiks . Kolme juhet, millega
koormus e. tarbija on ühendatud generaatori faasimähistega nimetatakse liinijuhtmeteks ja neid tähistatakse L1,
L2 ja L3. Liinijuhtmete vahelisi pingeid nimetatakse liinipingeteks ja tähistatakse·U . Liinipingete effektiiv- e.
tegevväärtust tähistatakse U-ga. Iga liinijuhtme ja neutraaljuhtme vahelist pinget nimetatakse faasipingeks ja
tähistatakse· U effektiiv- e. tegevväärtust aga Uf-ga. Faasivooludeks nimetatakse voole, mis kulgevad
generaatori faasimähistes või tarbija faasides. Liinijuhtmetes kulgevaid voole nimetatakse liinivooludeks.
Tähtühenduse korral on liini- ja
faasivoolud võrdsed. 8. Kolmefaasiliste vooluringide kolmnurkühendus.
Kolmnurka ühendatud vooluringide puhul puudub neutraaljuhe. Kolmnurkühenduse korral ühendatakse
generaatorimähiste algustega A, B ja C liinijuhtmed L1, L2 ja L3; esimese faasimähise lõpp X ühendatakse teise
faasimähise algusega B, teise faasimähise lõpp Y ühendatakse kolmanda algusega C ja kolmanda lõpp Z esimese
algusega. Selliseühendusviisi puhul on faaside emj-d suunatud ühesuguselt, mistõttu generaatoris toimib nende
algebraline summa. 9. Pinge, voolu, võimsuse ja energia mõõtmine
alalis - ja vahelduvvooluringis.
Voolu mõõtmine: Voolu mõõtmiseks mingis vooluahela osas lülitatakse sellesse jadamisi
ampermeeter , mille
sisetakistus peab olema väike. Mõõtmiseks alalisvooluahelas on levinuimaks magnetoelektrilised
ampermeetrid .
Harvem kasutatakse
elektromagnetilisi .
Vahelduvvooluahelate korral leiavad kasutamist peamiselt
elektrodünaamilised ampermeetrid. Ampermeetri mõõtepiirkonna laiendamiseks mõõtmistel alalisvooluahelas
kasutatakse sunti ning vahelduvvooluahelas voolutrafot.
Pinge mõõtmine: Pinge mõõtmiseks ahela mingis osas lülitatakse mõõteriist- voltmeeter selle osaga rööbiti. Et
voltmeeter võimalikult vähe mõjutaks ahela tööolukorda, peab tema sisetakistus olema küllalt suur, võrreldes
ahela takistusega. Alalisvooluahelais pinge mõõtmiseks kasutatakse magnetoelektrilisi voltmeetreid,
vahelduvvooluahelais elektromagnetilisi voltmeetreid. Väikeste vahelduvpingete mõõtmisel annavad paremaid
tulemusi elektronvoltmeetrid Mõõtmistel vahelduvvooluahelais tuleb arvestada mõõteriista ja lülituse
näivtakistusi. Voltmeetri mõõtepiirkonda laiendatakse eeltakistite ja pingejaguritega. Eeltakisti lülitatakse
mõõtemehhanismiga jadamisi
Pingejagur koosneb takistite kogumist, mis on valitud nii, et mõõtmisel ei langeks voltmeetri klemmidele pinget,
mis ületab riista
nimipinge . Kõrge
vahelduvpinge mõõtmisel laiendatakse voltmeetri mõõtepiirkonda pingetrafoga.
Trafo primaarmähis 1 ühendatakse rööbiti võrku, mille pinget on vaja mõõta. Voltmeeter ühendatakse sekundaarmähise 2 klemmidega. Pingetrafosid valmistatakse ühe ja kolmefaasilistena.
Võimsuse mõõtmine: Aktiivvõimsust mõõdetakse elektrodünaamiliste vattmeetritega. Need mõõteriistad leiavad
samuti rakendamist võimsuse mõõtmisel alalisvooluahelais. Kui vattmeetri ühe mähise
otsad ümber vahetada,
muutub pöördemomendi suund. Õige ühendamise tagamiseks on kõigil vattmeetreil üks voolu- ja üks
pingemähise klemm märgitud tärniga. Need on nn generaatoriklemmid. Mõõtmistel
viimased tavaliselt
ühendatakse omavahel. Õigesti ühendatud vattmeetri mähistes on voolud suunatud generaatoriklemmidelt
mittegeneraatoriklemmidele. Võimsuse mõõtmisel kolmefaasilises ahelas kasutatakse mitmeid võtteid. Kui
tegemist on sümmeetrilise koormusega,
piisab aktiivvõimsuse P mõõtmiseks ühest vattmeetrist.
Kolmnurklülituse korral tuleb luua tehisnullpunkt. Selleks vajalike lisatakistite r takistus valitakse võrdne
vattmeetri pingemähise takistusega. Üldine ahelas
tarbitav aktiivvõimsus P=3PPW , kus PPW on vattmeetrilt
loetud ühe faasi aktiivvõimsus. Mittesümmeetrilise koormuse korral võib võimsust mõõta kolme vattmeetri abil.
Iga vattmeeter mõõdab vastava faasi võimsust ning kogu ahela võimsuse saamiseks liidetakse faasivõimsused
kokku. Reaktiivvõimsuse mõõtmiseks kolmefaasilistes süsteemides kasutatakse mitmesuguseid võtteid. Valiku
määrab asjaolu, kas tegemist on sümmeetrilise või mittesümmeetrilise olukorraga. Üldiselt püütakse toime tulla
tavaliste vattmeetritega. Vattmeeter ühendatakse mõõdetavasse ahelasse nii, et jälgitava voolu ja pinge vaheline
faasinihkenurk oleks 90 kraadi. Sümmeetrilise koormuse korral saab reaktiivvõimsust Q kolmefaasilises
süsteemis mõõta ühe vattmeetriga.
Elektrienergia mõõtmine: Elektrienergia mõõtmiseks vahelduvvooluahelais kasutatakse ühe-, kahe- ja
kolmeelemendilisi induktsioonsüsteemi arvesteid, alalisvooluahelais on kasutatavamad elektrodünaamilised
arvestid. Hõlpsamalt saab aktiivenergiat Wa kolmefaasilises ahelas mõõta kahe- või kolmeelemendilise
arvestiga. Kolmejuhtmelises ahelas tehakse mõõtmised kaheelemendilise arvestiga. Reaktiivenergiat Wr, juhul
kui koormus on sümmeetriline, saab määrata kahe ühefaasilise
arvesti abil. Energia Wr leidmiseks tuleb arvestite
näitude vahe korrutada 3.
10. Elektrimasina mõiste, teetähiseid ajaloost, areng.
Seadmeid, mis on määratud
mehhaanilise energia muundamiseks elektrienergiaks või vastupidi nim. ele ktrimasinateks. Kuni XIX sajandi lõpuni valitses tööstuses ajamimootorina aurumasin, mille kõrvale
ilmus sajandi lõpus
auruturbiin . Elektriajam sai alguse esimestest elektrimootoritest. 1834. a. konstrueeris M. H.
Jacobi kasutuskõlbliku alalisvoolumootori, mida ta hiljem kasutas Neeval paadimootorina. Tööstuselektriajamite
arengus sai määravaks kolmefaasilise asünkroonmootori loomine 1889. a. M. O. Dolivo-
Dobrovolski poolt.
Tööstuselektriajamite arengus oli oluliseks tähiseks üksikajami kasutuselevõtt 20-ndail aastail, mille tulemusena
lihtsustus ülekanne elektrimootori ja töömasina vahel, suurenes masinate jõudlus ja kiiruse reguleerimise
võimalus. 11. Elektrimasinate osatähtsus, liigitus.
Eesti põllumajanduses kasutati esialgu elektrienergiat ainult valgustuseks.
Kuid juba 30-ndatel aastatel oli üksikutes suurtaludes kasutusel ka elektrimootoreid.
Elektriajami kasutamine oli võimalik neis
taludes , kus lähedal oli
elektrijaam või
elektriliin. Enamik elektrijaamu ehitati sel ajal linnade lähedusse, varustamaks neid
peamiselt valgustusenergiaga. Elektriajamite kasutamine meiereides, veskites ja põllumajandustootmises laienes
1948.1949. a. põllumajanduslike hüdroelektrijaamade ja põllumajanduslike elektrivõrkude ehitamise järel.
Viiekümnendate aastate lõpus, kuuekümnendate alguses ehitati juba elektrifitseeritud lüpsilautu ja sigalaid, kus
kasutati üksikelektriajameid vaakumpumpade ja külmamasinate ning sigalate söödaköögis purustite, segistite ja
muidugi veevarustuspumpade käitamiseks. Veevarustusseadmed olid esimesed automaatjuhtimisega
elektriajamid põllumajanduses.
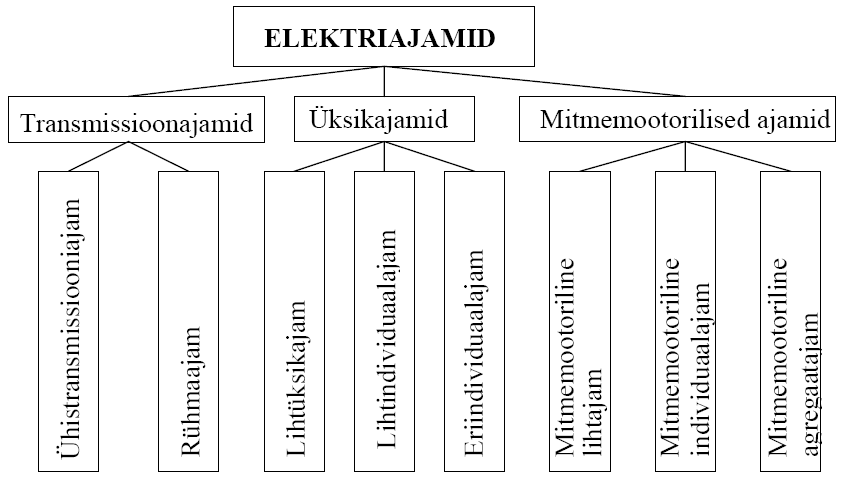
Transmissioonajamis käitab üks elektrimootor mitut töömasinat. Transmissioonajamid
võivad olla ühistransmissioon- või rühmaajamid.
Ühistransmissioonajam on selline, kus elektrimootorilt antakse liikumine
peatransmissioonivõllidele ja sealt edasi töömasinatele.
Rühmaajam on selline
ajam , kus elektrimootorilt antakse liikumine töömasinate
rühmale.
Üksikajamiks nimetatakse sellist ajamit, kus iga masinat või täiturmehhanismi
käitab üks elektrimootor.
Individuaalajamis on töömasin ja mootor seotud mõlema ehituse muutmise teel. Lihtindividuaalajam on selline ajam,kus elektrimoori ja töömasina vahel säilivad mehaanilised ülekanded
(paindvõll, hammasrattad,
sidur jne.).
Eriindividuaalajam on selline ajam, kus ülekanded puuduvad täielikult
ja mootori üksikud osad (
rootor , võll) kuuluvad töömasina hulka.
Mitmemootoriliseks nimetatakse sellist elektriajamit, kus töömasina üksikuid
lülisid või tööorganeid käitatakse eraldi elektrimootoriga.
Mitmemootoriline lihtajam on selline, kus
keeruka töömasina eri sõlmedel on
omaette elektrimootorid , mis paigaldatakse tööorganitest eraldi või on nendega
mehaaniliselt sobitatud ilma ehitust muutmata.
Mitmemootoriline individuaalajam on selline, kus elektrimootorid on ühendatud
vahetult täiturmehhanismidega. Kadunud on mehaanilised ülekanded, muudetud
on töömasina ehitust
Mitmemootoriline agregaatajam on selline elektriajam, kus koos töötab terve
mootorite ja töömasinate süsteem, täites ühtset tootmisülesannet. 12. Trafo tühijooks, emj., ülekandetegur.
Trafo tühijooksuks nimetatakse sellist tööolukorda, kus primaarmähis on ühendatud toitevõrguga, katkestatud
sekundaarmähises aga voolu pole. Trafo elektromotoorjõud on pinge tühijooksul. Suurema ja väiksema emj e1 E1 1 k12 e2 E 2 2
suhet nimetatakse ülekandeteguriks: 13. Trafo koormusolukord, pinge- ja vooluvõrrandid (voolude tasakaal).
Kuna
koormusel on mõlemas mähises nullist erinev vool siis tekitavad terassüdaamikus magnetvoo üheaegselt
primaar ja sekunadaar magneetimisergutus
kusjuures sekundaar- magneetimisergutus on südamiku demagneetiva
toimega.
Selgub et magneetimisergutuste vektorsumma on konstantnesuurus ja võrdne tühijooksu
magneetimisergutusega.I1=I2+I0
Primaarne U1=-E1+I1(r1+jx1)
I1=I2+I0
Sekundaarne U2-I2(r2+jx2) 14. Trafo pingemuutus, välistunnusjoon. Pingelangu tõttu trafo sekundaarmähise takistusel muutub sekundaarpinge U2 Sõltuvust U2 =f(I29 nimetatakse trafo väliskarakteristikuks. Sarnase sõltuvuse saame ka koormusteguri kaudu U2= f() Otstarbekohane on pingemuutus leida konstantse nimipinge suhtes. Arvestades seda, et U20=U1n , saame protsentuaalse pingemuutuse U=(Ua*cos2+Ur*sin2) Trafo väliskarakteristiku leiame U2=f(,cos2) 15. Trafo energeetiline diagramm, kasutegur.
Trafo kasutegur-nim tarviteile antava väljundvõimsuse P2 ja võrgust tarbitava sisendvõimsuse P1 suhet.Kasutegur
= P2 /P1 100% = P2 *100%/ P2 +Pt+Pv,kus pt on
terasekadu ja pv vasekadu
Treafo kasutegur sõltub koormusest.Teraskadu on
konstantne , vasekadu on võrdeline voolu
ruuduga .Kasutades
koormusteguriks nimetatavat suurust =S2/S2n, saame trafo
kasuteguri avaldada kujul = P2 /P1= S2n,cos2 / S2n,cos2+P + 2 Pvn kus Pvn on vasekadu nimivoolu korral
Arvutused ja katsed on näidanud et trafo kasutegur on kõigesuurem siis kui
koormustegur =0,7...0,8 mispuhul
vasekadu on väärtuselt lähedane teraskaoga. 16. Autotrafod, voolude võrrand, ülekandetegur.
Säästetrafo e.
Autotrafo üks mähis moodustab osa teisest. Selle trafo primaar ja sekundaarahel ei ole elektriliselt
isoleeritud. Et autotrafo mähised ei ole elektriliselt teineteisest isoleeritud, siis ei valmmistata neid suure
ülekandeteguriga ohutustehnilistel põhjustel. Autotrafosid valmistatakse ka kolmefaasilistena Tihti on autotrafod muudetava sekundaarpingega. Levinuim on laboratoorne autotrafo. Selle trafo saab lülitada primaarpingele 220 või 127V. 17. Keevitustrafod, välistunnusjoon.
Kaarkeevitusel kasutatakse trafosid sellise sekundaarpingega, mis kindlustav kaare kindla süttimise ja stabiilse
põlemise. Käsikaarkeevitusel kasutatakse trafosid tühijooksupingega 60..75 V, mis nimikoormusel langeb 30 V-
ni.
Keevitusvoolu piiramiseks lühisel ning kaare stabiilseks põlemiseks peab trafol olema järsult langev
väliskarakteristik U2=f(I2) keevitusahelas aga
tunduv induktiivsus (cos=0.4...0.5). keevitusvoolu suuruse
reguleerimiseks peab trafo induktiivsus olema reguleeritav.
Laialdaselt kasutatakse keevitustrafosid täiendava reguleeritava paispooliga. Vastava mehhanismi abil õhupilu vähenemisel pooli magnetahelas induktiivsus kasvab.
Käsikaarkeevitusel kasutatavaid ilma paispoolita trafosid valmistatakse võimsusega kuni 20 kVA,
automaatkeevituseks kuni 100 kVA ja rohkem. 18. Asünkroonmootorid, liigitus, ehitus.
Asünkroonmootorites muundatakse elektrienergia mehaaniliseks energiaks pöördemomendi näol.
Asünkroonmootor koosneb staatorist, mis on terasplekkidest koostatud õõnessilinder ja mille
sisepind on
uurestatud. Uuretes paikneb
kolmefaasiline staatorimähis pöördmagnetvälja tekitamiseks. Teiseks põhi
komponendiks on pöörlev rootor, mis asub võllil, on terasplekkidest
silinder , mis on samuti varustatud uuretega.
Uurdes asub rootormähis, staatori ja rootori vahel on väike õhupilu.
Liigitus:
Faasirootoriga asünkroonmootorid, lühisrootoriga asünkroonmootorid, kahefaasiline asünkroonmootor,
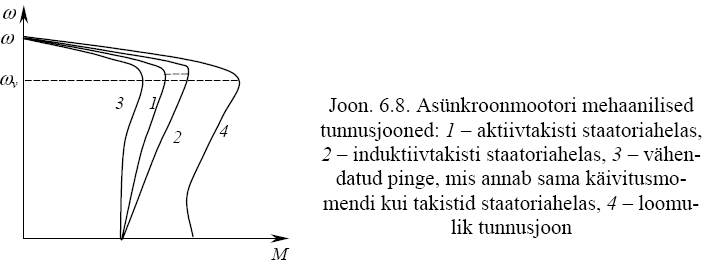
ühefaasiline asünkroonmootor 19. Asünkroonmootori tööpõhimõte,
libistus , pöörlemissagedus. Asünkroonmootor töö põhineb pöördmagnetvälja ja rootori voolu vastasikusel toimel. Pöördmagnetvälji, mille
tekitab kolmefaasiline vool staatorimähistes, läbib õhupilu ja aheldub rootorimähisega. Rootorivoolu põhjuseks
on pöördmagnetvälja poolt rootorimähises indutseeritud elektromootorjõud, mis on võrdeline rootori suhtelise
kiirusega pöördmagnetvälja suhtes. Asünkroonmootoris pöörleb rootor alati samas suunas, kuid aeglasemalt
sünkroonselt pöörlevast staatori magnetväljast.
Staatorimähises loodava magnetvälja pöörlemiskiiruse ja rootori pöörlemiskiiruse erinevust iseloomustab
libistus. Libistust võib vaadelda kui rootori suhtelist mahajäämust sünkroonkiirusega pöörelvast staatori
magnetväljast. Rootor pöörleb mittesünkroonselt ehk asünkroonselt, millest ka mootori nimetus.
Libistus- Suhtelise kiiruse ja sünkroonkiiruse suhet nimetatakse libistuseks.
Libistust võib tõlgendada ka rootori suhtelise mahajäämusena sünkroonselt pöörlevast staatori magnetväljast. Pöörlemissagedus- Kui asünkroonmootor pöörleb, siis sagedus f2









































































































































































































































































































































Kõik kommentaarid