Põltsamaa
Ametikool
Jõuülekanne
A3
Alvar
Müür
Kaarlimõisa
2010
Sisu
1. Hammasülekanded 3
1.1 Eelised ja puudused 3
1.2 Liigid 3
ringkiiruse järgi 4
Hammasülekannetest üldiselt 4
1.3
Diferentsiaal 5
1.3.1 Planetaarülekanne 5
1.3.2 Tiguülekanne 9
2. Rihmülekanne 11
11
2.1 Rihmülekande eelised: 11
2.2 Rihmülekande puudused: 11
2.3 Rihmülekannete klassifikatsioonid 12
3. Võllid ja teljed 13
4. Kettülekanne 14
1.
Hammasülekanded
1.1
Eelised ja puudused
- Eelised- kõrge kasutegur (kuni 98%).
- väikesed mõõtmed (võrreldes hõõrd- ja rihmülekandega).
- konstantne ülekandearv.
- suur ülekantav võimsus (kümneid tuhandeid kilovatte)
- võllide ja laagrite väike koormus.
- eriseadmete vajadus hammaste lõikamiseks.
- võimatu muuta ülekandearvu sujuvalt .
- valmistamise ebatäpsusest tingitud müra.
1.2
Liigid
Hammasülekannete
liigitus
telgede vastastikuse asendi järgi-
- silinderhammasülekanded
- koonushammasülekanded
- hüpoidülekanded
- hammaslattülekanded
- kruvihammasülekanded
Hammasülekannete
liigitus hammaste paiknemise järgi ratta moodustaja suhtes-
- sirghammastega
- noolhammastega
- kaldhammastega
- kõverjooneliste hammastega
Hamba
kuju järgi-
- evolventprofiiliga
- tsükloidprofiiliga
- ringjoonelise profiiliga
Konstruktiivse
kujunduse järgi-
- lahtised hammasülekanded:
- kinnised hammasülekanded
ringkiiruse
järgi
- väga aeglasekäigulisteks ( ringkiirus alla 0,5 m/s )
- aeglasekäigulisteks ( ringkiirus 0,5-3 m/s )
- keskkäigulisteks ( ringkiirus 3-15 m/s )
- kiirekäigulisteks ( ringkiirus üle 15 m/s )
Hammasülekannetest
üldiselt
Ülekandetegur
on üks tähtsamaid hammasülekannet iseloomustavatest
parameetritest.
Valdav
osa hammasülekannetest
teostab pöörlemise ülekandmist ühelt
võllilt teisele tingimustes, kus võllide asend on fikseeritud ning
ei muutu. Sellisel juhul võib hammasrataste pöörlemist käsitleda
lihtliikumisena.
Vajadus
hammasülekande järele tekib tavaliselt siis kui on vaja muuta
võllide pöörlemiskiirust,
kusjuures üldjuhul on
töömasinat
käitav
jõumasin
(
elektrimootor)
liialt suure pöörete arvuga ja temaga ühendamiseks on vaja vahele
asetada pöördeid
alandav hammasülekanne ehk
reduktor .
Seetõttu tekib vajadus pöörlemiskiiruse mutest iseloomustamiseks
mingi konkreetse parameetriga. Selleks on
ülekandetegur
ehk ülekandesuhe.
Joonis
1. Hammasülekanne
1.3
Diferentsiaal
1.3.1
Planetaarülekanne
Planetaarülekandeks
nimetatakse
hammasülekannet,
kus on liikuvate
telgedega
hammasrattaid.
Planetaarülekanded koosnevad välis- ja sisehambumisega
hammasratastest. Planetaarülekandes on keskratas välishambumises
satelliitidega, mis pöörlevad raami paigutatud telgedel, kusjuures
ka raam ise pöörleb. Teisest küljest on
satelliidid sisehambumises
liikumatu hammasrattaga ning pöörlevad koos
raamiga ümber
keskratta.
Vedav
lüliVedavaks
lüliks võib planetaarülekandes olla kas keskratas või siis raam.
See võimaldab ülekande ühe ja sama skeemi juures saada erinevaid
ülekandearve.
Lihtsaimal planetaarülekandel, millel on liikumatu ratas ning vedav
keskratas võib ülekandearvu leida järgmise valemiga.
kus
zliikumaturatas
on sisehammastega liikumatu ratta hammaste arv,
zvedavkeskratas
on
vedava keskratta hammaste arv.
Kui
panna aga pöörlema ka üldjuhul liikumatu sisehammastega ratas,
siis sõltub raami
nurkkiirus
ühtaegu keskmise ja välimise ratta nurkkiirustest ning ülekanne
muutub
diferentsiaalülekandeksPlanetaarülekande
astmete- ja ülekandearv
Planetaarülekanded
võivad olla ühe- ja mitmeastmelised
ülekandearvuga
kuni 1000 ja rohkem.
Planetaarülekande
eelised:Planetaarülekande
kasutamine võimaldab vähendada
konstruktsiooni
massi kahe- ja enamkordselt.
Satelliitide
ühtlane
paigutus raamis võimaldab omavahel tasakaalustada
planetaarülekandes rataste hambumisel tekkivate jõudude
radiaalkomponente.
Võimaldab
saada suuri ülekandearve 1000 ja rohkem.
Planetaarülekande
puudused:Kõrgendatud
täpsusnõuded rataste valmistamisel ja
koostamisel.
Madal
kasutegur,
eriti suurte ülekandearvude korral.
Planetaarülekande
konstrueerimisele eelnev arvutus
Planetaarülekannete
hammasrattaid arvutatakse
tugevusele samade valemitega
mis
tavaliste ülekannete hammasrattaidki.
Planetaarülekande
konstrueerimist alustatakse kinemaatikaarvutustest. Lähtesuurus on
nõutav ülekandearv. Kinaemaatikaarvutus seisneb hammasrataste
hammaste arvu
valikus . Sisselõike vedava keskratta hamba jalal peab
tema hammaste arv
za
olema suurem kui 17. Enamasti võetakse
za
= 18
(kasutatakse ka nihutust ja ).
Teiste rataste hammaste arvusid
valides arvestatakse kolme tingimust:
ühistelgsust,
satelliitide
paigutust võrdsete nurkade all (sümmeetrilisust),
heanaaberlikkust.
Planetaarülekande
kinemaatikaarvutus
Planetaarülekande
kinemaatikaarvutus tehakse järgmiste valemitega:
Ülekandesuhe:
hammaste
arvud za≥18;
zb=za(i-1);
zg=0,5(zb-za;
Ühistelgsuse
tingimus (kui lähtekontuuri ei nihutata):zb
=
za
+ 2
zgSümmeetrilisustingimus
(koostamistingimus):ja
ehk
kus
nω
on satelliitide arv ülekandes (tavaliselt 3), e aga
suvaline täisarv;
heanaaberikkustingimus:
,kus
aω
on ülekande telgede vahe, 0,5
dsatelliidipeaderingjoon
on satelliidi peaderingjoone läbimõõt.
Pärast
kinemaatikaarvutusi tehakse jõuarvutus.
Planetaarülekande
jõuarvutus
Planetaarülekande
jõuarvutuse esimestes järkudes (materjali ja termotöötluse valik,
lubatud pingete määramine) toimitakse üldiselt
silinderhammasülekannete
arvutamiseks antud soovituste järgi. Erinevused on järgmised:
Lubatud
pingete määramisel leitakse eategurid
KHL
ja
KFL
rataste suhtelise liikumise järgi, st. ja
,
kus on
pingevaheldustsüklite arv rataste suhtelisel liikumisel.
Pingevaheldustsüklite
arv vedaval rattal: ,
kus on
vedava keskratta suhteline nurkkiirus, ω
vedav
ja ω
raam
on vedava ratta ja raami nurkkiirused.
Satelliitidel ,
kus on
raami suhteline nurkkiirus.
Planetaarülekande
telgede vahe
Planetarrülekande
telgede vahe määratakse järgmise valemiga:
,
kus
Ω
= 1,1...1,2
on koormusvoogude ebaühtluse tegur,
ψ
a
on
hammasratta laiustegur, mis korral
on 0,5
i
> 6,3
korral aga 0,315.< väärtus asendatakse lähima suurema väärtusega
standardreast.
Suurratta
laius planetaarülekandes
Suurratta
laius planetaarülekandes arvutatakse valemiga
b2
= ψ
aaω
Väikeratta
läbimõõtÜlekande moodul Arvutatud
mooduli väärtus asendatakse lähima väärtusega standardreast
Pärast seda määratakse hammasrataste läbimõõdud, selgitatakse
toorikute
sobivus ja arvutatakse hambumisjõud.
Hammasrataste
läbimõõdud planetaarülekandes
Hammasrataste
toorikute sobivus planetaarülekandes
Et
termotöötlusega saada arvutamisel eeldatud hammasrataste
mehaanilisi omadusi, ei tohi toorikud olla lubatust suuremad.
Ringjõud
Seejärel
kontrollitakse painde- ja kontaktpingeid.
Hammaste
paindekontrollHammaste
kontroll kontaktpingete järgiPlanetaarülekande konstrueerimine Arvutustele
järgneb konstrueerimine. Nagu tavalisegi
reduktori
korral, koostatakse algul
eskiisprojekt .
Planetaarülekande
eskiisprojekt
Eskiisprojekti korral planetaarülekandes määratakse:
detailide
põhimõõtmed ja vastastikune asend,
võllide
esialgsed mõõtmed,
detailide
vahekaugused,
detailide
toereaktsioonid,
valitakse
laagrite
tüübid ning mõõtmed. Keskrataste võllid toetatakse kerge
seeria radiaalkuullagritele,
satelliidid aga keskmise seeria sfäärilistele
kuul-
või
rulllaagritele.
Saadud
tulemuste põhjal tehakse esialgne eskiisprojekt koos esialgsete
eskiisjoonistega.
Planetaarülekande
projektPlanetaarülekande
lõpliku projekti tegemisel võetakse arvesse kõiki eelnevalt
arvutustega leitud tulemusi ning lisaks eelnevatele arvutustele
tehakse veel järgnevat.Valitud
veerelaagritele tehakse
kontrollarvutus
toereaktsioonidega, mis leitud jooniselt. Arvestades suurimat
võimalikku pöördemomenti jaotuse ebaühtlust voogude vahel,
määratakse see jõud
kiirel (vedaval) võllil
,
kus d1
on
hammassiduri
jaotusläbimõõt. Aeglasel vedaval võllil ,
kus Th
on moment väljundvõllil (raamil), aω
ülekande telgede vahe. Kõige rohkem ongi
koormatud satelliitide
laagrid . Nende vajalik dünaamiline kandevõime Cvajalik
leitakse jõu
Fr
= 2
Ft
järgi, kus
Ft
on eelnevalt arvutataud ringjõud.
1.3.2
Tiguülekanne
EhitusTiguülekanne
koosneb
pöörlevast
kruvist, mida nimetatakse teoks, ja tigurattast, mille pöial olevate
hammastega hambuvad teo keermeniidid.
Ülekande
vedavaks lüliks on
tigu .
Tiguülekande
eelised
- sujuv ja müratu töö
- võimalus saada väikeste gabariitide juures suuri ülekandearve
- isepidurduvus
Tiguülekande
puudused:
- madal kasutegur
- hammasülekannetega võrreldes väike ülekantav võimsus (tavaliselt mitte üle 70 kW)
- suur kulumine
- vajadus kasutada kalleid materjale, nagu näiteks pronks
Tiguhambumise geomeetria Tiguülekandes
nagu hammasülekandeski esinevad tigu ja tiguratta silindrilised
algpinnad. Nende pindade kokkupuutumiskoht on hambumispoolus.
Tiguülekande
jagunemine pinna kuju järgiOlenevalt
pinna
kujust , millele lõigatakse keermeniidid, eristatakse:
- silindertigusid
- globoidtigusid
Tiguülekande
jagunemine keermeniidi profiili järgiKeermeniidi
profiili järgi telglõikes, eristatakse:
- sirgjoonelise profiiliga tigu
- kõverjoonelise profiiliga tigu
2.
Rihmülekanne
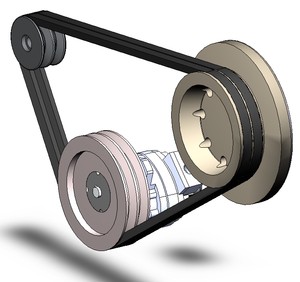
Joonis
2.
Klassikaline kiilrihmülekanneRihmülekanne
koosneb kahest või rohkemast rihmarattast, mis on kinnitatud
võllidele,
ja nendele asetatud lõputust rihmast. Rihmülekannet kasutatakse
põhiliselt siis, kui
võllide
vahekaugus on suur ning ülekanded ei nõua
rangelt konstantset
ülekandearvu
(välja arvatud
hammasrihmülekanne).
Rihmülekanded on
mehaanilistest
ülekannetest
ühed vanimad. Tänapäeva rihmülekannete
võimsus
ei ületa tavaliselt 50 kW, kuid leidub ka ülekandeid võimsusega
1000 kW.
2.1
Rihmülekande eelised:
- Võimalus kanda võimsusi üle suurte vahemaade (kuni 15 meetrit)
- Sujuv ja müratu töötamine
- Lihtne ehitus ja kasutamine
- Võime taluda purunemata suuri väheajalisi ülekoormusi
2.2
Rihmülekande puudused:
- Suhteliselt suured mõõtmed
- Rihma väike tööiga
- Rihma libisemisest tingitud muutuv ülekandearv
- Rihma pingusest tingitud suured koormused võllidele ja laagritele
2.3
Rihmülekannete klassifikatsioonid
Lamerihmülekanded
on
kiilrihmülekannetest
eelistatavamad suuremate
pöörlemiskiiruste,
telgede suure vahe ning ülekande maksumuse võimaliku vähendamise
korral. Ülekantav võimsus on tavaliselt 0,5...50kW, kuid esineb ka
lamerihmülekandeid võimsusega 1000kW ja rohkem
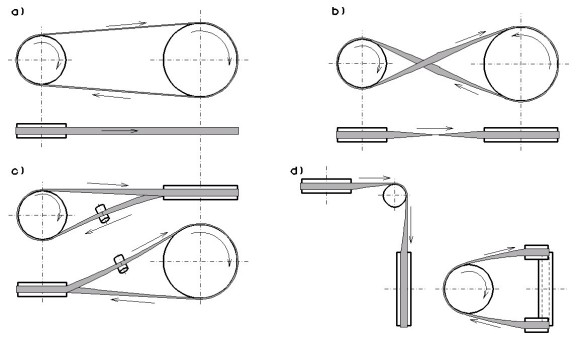
Lamerihmülekannete erikujud : Praktikas
kasutatakse mitmesuguste
skeemide järgi kujundatud
lamerihmülekandeid.
- Lahtist ülekannet kasutatakse, kui võllid on paralleelsed ja pöörlevad samas suunas.
- Ristuva rihmaga ülekannet kasutatakse, kui võllid on paralleelsed, kuid pöörlevad vastassuunas .
- Poolristuva rihmaga ülekannet kasutatakse kiivate võllide puhul.
- Juhtrullidega ülekannet kasutatakse samuti kiivate võllide puhul, kusjuures rihma liikumissuunda muudetakse juhtrullidega.
Joonis
3. a-lahtine
ülekanne; b-ristuva rihmaga ülekanne; c-poolristuva rihmaga
ülekanne; d-juhtrullidega ülekanneHammasrihm:
Hammasrihma õige
pingsuse määrab tavaliselt pingutusrulli
hoidevedru. Rihma saab kontrollida kui selle katted eemaldada. Katete
eemaldamiseks tuleb eemaldada generaatori
rihm jne.
rihmad . Sammuti
ka mootori väntvõlli rihma seib. Rihm ei tohi olla õline, kui on
siis vahetada ja nukkvõlli otsatihend. Enne rihma eemaldamist leidke
kõik pöörlevate rataste märgid. Kui märgid on leitud siis
vabastada regulaatori kinnituspoldid ja eemaldada rihm (oleks hea kui
saaks eelnevalt kõik rihma rattad fikseeritud, peale rihma
eemaldamist mootorit mitte keerata). Kui vana rihm tagasi panna siis
ta peaks jääma samas suunas pöörlema, visuaalselt kontrollitakse
eelnevalt rihma seisundit kontrollitakse rihma laiust ja võrreldakse
autodata andmetega. Tavaliselt
vahetatakse koos rihmaga ka tugi- ja
pingutusrullid. Tugi- ja pingutusrulli laagrid ei tohi käega
pöörates häälitseda. Uue rihma paigaldamisel lugeda eelnevalt
vana rihma hammaste arv ja võrrelge seda uuega. Mõnedel
mootoritel fikseeritakse nukkvõll, väntvõll ja kõrgrõhupump, enne seda kui
uus rihm on paigaldatud kontrollitakse nukkvõllide ja väntvõlli
otsatihendite leket (et õline ei ole) kui esineb õlis, siis
vahetage see.
Rihma pingutakse nii, et rihma pikem haru käega
pöörates ei võimalda rohkem kui 90 kraadi pöörata.
Pingutusrullidel on vedru sees, mis määrab keti pingutuse.
Pärast
koostamist keeratakse mootorit käsitsi vähemalt 2 ringi, et
kontrollida/veenduda rihma/keti paigaldamise õigsuses. Rihm kaetakse
plastik
katetega ja keti korral suletakse klapikambrikaan. Mootor
käivitatakse ja veendutakse tulemuse õigsuses.
3.
Võllid ja teljed
Teljed
on pöörlevate detailide kandjad,
võllid
lisaks sellele veel ka pöördemomenti edastavad.
Seega
töötavad võllid lisaks paindele alati ka väändele.
Enamik
võlle ja
telgi on sirged. Kolbmasinais vajatakse
murtud geomeetrilise
teljega väntvõlle,
peamiselt aparaadiehituses veel ka
paindvõlle.
astmeline
sirge võll, paindvõll,
Teljed
on kas liikumatud või koos neile kinnituvate detailidega pöörlevad.
Osi,
millega võllid ja teljed laagritele toetuvad, nimetatakse
tappideks.
Radiaaltapid
on enamasti silindrilised, harvem koonilised või sfäärilised.
Telgkoormust vastuvõtvad
tapid on kas
tasapinnalised või nn.
kammtapid.
Koonustapi
eripäraks on laagrilõtku reguleerimisvõimalus telgnihutust
kasutades. On levinud peamiselt peenmehaanika-seadmeis.
a-
silindriline, b- kooniline, c- sfääriline e. keratapp,
d-
tugi e. aksiaaltapp, e-
kammtapp 4.
Kettülekanne
Kettülekanne
on
ülekanne,
mis põhineb lõputa
keti
kujulise vedava lüli
hambumisel
ketiratastega,
mis kujutavad endast spetsiaalselt selle ülekande jaoks toodetud
hammasrattaid.
Lihtne
Pukskettülekanne
Kettülekannet
kasutatakse juhtudel kui
pöörlemisliikumist
tuleb
libisemata
üle kanda teineteisest kaugel (kuni 8 meetrit)
asetsevate võllide
vahel. Kettülekandes kasutatavaid kette nimetatakse ka
ajamikettideks.
Kettülekande
klassifikatsioon: - Pukskettülekanne
- Rullpukskettülekanne
- Hammaskettülekanne
- Kujulülikettülekanne
Kettülekande
eelised rihmülekande ees: - väiksemad mõõtmed.
- Võllide väiksem koormus sest keti eelpingus on väike.
- Suur kasutegur ( 0,96...0,98%).
Kettülekande
puudused: - Keti väljavenimine šarniiride kulumise tagajärjel.
- Võllide täpse montaaži vajadus.
- Keti ebaühtlane kiirus, eriti ketirataste väiksema hammaste arvu puhul. See põhjustab täindavaid koormusi .
- Kettülekanne on rihmülekandest kallim.
Kettülekande
kasutamine:Ketid
jagunevad kasutusalade järgi:
- ajamikettid
- veoketid
- lastiketid
AjamiketidAjamiketid
kannavad kettajamis võllilt
võllile üle pöördemomenti.
Et jõudu kantakse üle hambumisega, mitte aga suurt eelpingutust
nõudva
hõõrdega,
siis
piisab elementide sidestuse hoidmiseks tavaliselt keti vaba haru
kaalust ,
mis põhjustab läbiripet. Ajamikettülekanne on võrreldes
rihmülekandega
kompaktsem, koormused
laagritele
on väiksemad ning kett on rihmast tugevam. Oluline eelis on ka
libisemise täielik puudumine ja püsiv keskmine
ülekandearv.
Ajamiketid võimaldavad
võimsusi
üle kanda suures vahemikus (kilovati murdosast kuni tuhandete
kilovattideni),
ent kõige sagedamini kasutatakse neid
võimsustel
kuni 100kw, sest üle selle kasvab järsult ülekande
maksumus.
Tavaliselt on
ülekandearv
i










































Kõik kommentaarid