TALLINNA TEHNIKAÜLIKOOL
Automaatikainstituut
BORIS GORDON,
EDUARD PETLENKOV
ISS0010 SÜSTEEMITEOORIA ÜLESANNETE KOGU
2007
Parandatud 2009 Kaane kujundanud Ann
Gornischeff Autoriõigus: B. Gordon, E. Petlenkov, 2007
ISBN 978-9985-59-688-3
2
EESSÕNA
Käesolev ülesannete kogu on mõeldud kasutamiseks
abimaterjalina õppeaines ISS0010
Süsteemiteooria. Kogu täiendab
Hanno Sillamaa õpikut “Süsteemiteooria”, millel on olnud
juba neli trükki. Iga peatüki alguses on toodud
viide selle õpiku (Hanno Sillamaa.
Süsteemiteooria, TTÜ kirjastus) vastavatele teoreetilistele peatükkidele. Kui selles õpikus
vastavat materjali ei ole, siis on antud viide teisele raamatule (K. Ogata. Modern control
engineering , 2002).
Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval-
mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teoreetilise
kursuse käigus läbivõetavate teemade kohta.
Igas peatükis on nn näidisülesanded (täieliku lahenduskäiguga) ja ülesanded iseseisvaks
lahendamiseks (mille kohta on ülesannete kogu lõpus toodud vastused ja mõnikord ka
vahetulemused).
Autorid on kasutanud samu tähiseid, mis on kasutusel H. Sillamaa raamatus, välja arvatud
diskreetsete süsteemide maatriksite tähistus, kus
F ja
G asemel kasutatakse kreeka tähti
Φ ja
Γ.
Selle aine õpetamise pikaajaline kogemus näitas sellise ülesannete kogu vajalikkust. Kõik
märkused, soovitused ja
teated avastatud vigadest on teretulnud.
Autorid tänavad oma kolleegi professor
Ennu Rüsterni asjalike märkuste ja soovituste eest
ülesannete kogu ettevalmistamise käigus.
3
SISUKORD
Eessõna ....................................................................................................................................... 3
1.
Laplace ’i
teisendus ................................................................................................................ 5
2. Ülekandemudel, hilistumisega süsteemide ülekandefunktsioonid ja
siirdeprotsessid .......... 8
3. Süsteemide
kompositsioon .................................................................................................. 13
4. Lineaarse
pidevaja süsteemi
olekumudel , selle
lahend ja maatrikseksponendi leidmine ... 18
5. Diferentsiaalvõrrandite süsteemi ja olekumudeli seos ........................................................ 22
6. Ülekandekarakteristikud ...................................................................................................... 26
7. Olekumudeli ja ülekandemudeli seos. Ülekandefunktsioonide, impulsskajade ja
hüppekajade
maatriksid ...................................................................................................... 29
8. Siirdeprotsesside arvutus diferentsiaalvõrrandist ................................................................ 32
9.
Diskreetaja süsteemide analüüs ........................................................................................... 39
10. Süsteemide stabiilsus, juhitavus ja jälgitavus .................................................................... 49
11. Stabiliseerimissüsteem ehk olekuregulaator ...................................................................... 54
12. Jälgimissüsteem ehk olekutaastaja ..................................................................................... 62
13. Mittelineaarsed süsteemid ja nende lineariseerimine ......................................................... 67
LISA 1 Operaatorteisendused ................................................................................................ 73
LISA 2 Operaatorteisenduste omadused ................................................................................ 74
LISA 3 Ülesannete vahetulemused ja vastused ...................................................................... 75
4
1. LAPLACE’I TEISENDUS
Antud peatükk, mis oma sisu poolest sobiks rohkem matemaatikaalasesse õppematerjali, on
toodud siin selleks, et oleks võimalus natukene
korrata Laplace’i teisendust, kuna meie
kursuse raames tuleb seda kasutada küllaltki tihti. Selle peatüki teoreetilisi aluseid saab leida
H. Sillamaa õpikust ptk. 2.3.
Laplace’i integraalne teisendusvalem loob üksühese vastavuse originaalfunktsioonide ja kuju-
tisfunktsioonide vahel. Originaali ja kujutise vastavust tähistame järgmiselt:
x(
t)
L
← →
X(
s)
või
X(
s) =
L(
x(
t)) või
x(
t) =
L-1(
X(
s)). Laplace’i
teisenduse ja tema omaduste
tabelid asuvad
vastavalt
lisas 1 ja lisas 2.
Näidisülesanne N 1.1 5 2
s + 5
s + 1 )
0
Leiame originaali
x(
t) , mis vastab Laplace’i kujutisele
X (
s) =
.
(
s + )
3 (
s + )
4 (
s + )
5
Lahenduskäik Lahutame kujutise
X (
s) osamurdudeks:
5 2
s + 25
s + 50
ABCX (
s) =
(
s + )
3 (
s + 4)(
s + )
5
(
s + )
3
(
s + 4)
(
s + )
5
A s + 4)(
s + )
5 +
B(
s + )
3 (
s + )
5 +
C(
s + )
3 (
s + 4)
(
s + )
3 (
s + 4)(
s + )
5
2
As + 9
As + 20
2
A +
Bs + 8
Bs + 15
2
B +
Cs + 7
Cs + 12
C =
(
s + )
3 (
s + 4)(
s + )
5
2
s (
A +
B +
C) +
s 9
(
A + 8
B + 7
C) + 20
A + 15
B + 12
C(
s + )
3 (
s + 4)(
s + )
5
Nüüd
paneme kirja lineaarsete võrrandite süsteemi. Meil on 3 tundmatut ja 3 võrrandit. Järeli-
kult laheneb süsteem üheselt.
A +
B +
C = 5
9
A + 8
B + 7
C = 25
20
A +15
B +12
C = 50
Lahendades süsteemi, saame
A = 1 ,
0
B = −3 ,
0
C = 25.
Seega,
5 2
s + 25
s + 50
10
30
25
X (
s) =
−
(
s + )
3 (
s + )
4 (
s + )
5
(
s + )
3
(
s + )
4
(
s + )
5
Kordajate A,
B ja
C leidmiseks, kui
nimetajad on ühekordsed
reaalsed poolused, eksisteerib ka
lihtsam leidmise viis resiidide kaudu (tihti saab
arvutust teha isegi peast):
5 2
s + 5
s +1 )
0
[5(− )32 + (5− )3+10]
A =
res s→ 3
−
(
s + )
4 (
s + )
5
[(− )
3 + 4][(− )
3 + ]
10
5
5
5 2
s + 5
s +1 )
0
[5(− )42 + (5− )4+10]
B =
res= −
s→ 4
−
(
s + )
3 (
s + )
5
[(− )
4 + ]
3 [(− )
4 + ]
30
5
5 2
s + 5
s +1 )
0
[5(− )52 + (5− )5+10]
C =
res s→ 5
−
(
s + )
3 (
s + )
4
[(− )
5 + ]
3 [(− )
5 + ]
25
4
Tänu Laplace’i teisenduse lineaarsuse omadustele
−
L 1 (∑λ
X (
s)) =
λ
L 1(
X (
s)) , kus λ on konstandid.
ii∑ −
iiiiiJärelikult,
−
−
5
25
50
−
10
30
25
1
s 2
1
sx t( ) =
L (
X (
s)) =
L=
L 1
−
(
s + )
3 (
s + 4)(
s + )
5
(
s + )
3
(
s + 4)
(
s + )
5
tabelist
−
1
−
1
−
1
1
1
1
−3
t−4
t−5
t= 10
L− 30
L+ 25
L= 10
e− 30
e+ 2
e5
(
s + )
3
(
s + 4)
(
s + )
5
Näidisülesanne N 1.2 Leiame funktsioonile
x t( ) = 10
e−2
t +
t( − 2)
e−5(
t−2) +
e−
t sin
t2
vastava Laplace’i kujutise
X (
s .
)
Lahenduskäik x(
t) = 10
x (
t) +
x (
t − 2) +
x (
t) , kus
−2
tx t( ) =
e,
5
−
tx t( ) =
te,
x t( ) =
e−
t sin
t2
1
2
3
1
2
3
X (
s) =
L(
x(
t)) =
L(10
x (
t) +
x (
t − )
2 +
x (
t)
10
L(
x (
t))
e s L(
x (
t))
L(
x (
t))
1
2
3
) =
+ −2
1
2
3
−2
stabelist tstte10
L( −
10
2
2
e)+ −2
eL( −5
te)+
L( −
e sin2
t) =
s + 2
(
s + 5)2 (
s + 2)
1
+ 2
2
10
2
−
e s2
s + 2
(
s + 5)2
2
s + 2
s + 5
6
Ülesanded iseseisvaks lahendamiseks
IL 1.1 − 8 2
s + 5
Leida
originaal x(
t) , mis vastab Laplace’i kujutisele
X (
s) =
.
(
s + )
1 ( 2
s + 4
s + 1 )
3
IL 1.2
Leida funktsioonile
x t( ) = 2
e 3
− (
t −3) +
t( − 2)
e 5
− (
t −2) +
e−
t cos
t2
vastava Laplace’i kujutise
X (
s .
)
IL 1.3 1 (
0
s + )
3 2
Leida originaal
x(
t) , mis vastab Laplace’i kujutisele
X (
s) =
.
s(
s + )
2 ( 2
s + )
1
IL 1.4 1 (
3
s + )
5 2
Leida originaal
x(
t) , mis vastab Laplace’i kujutisele
X (
s) =
.
s(
s + )
1 ( 2
s + 2 )
5
IL 1.5 2 (
0
s + )
4 2
Leida originaal
x(
t) , mis vastab Laplace’i kujutisele
X (
s) =
.
s(
s + )
2 ( 2
s +1 )
6
IL 1.6 26(
s + )
3 2
Leida originaal
x(
t) , mis vastab Laplace’i kujutisele
X (
s) =
.
s(
s + )
2 ( 2
s + )
9
7
2. ÜLEKANDEMUDEL, HILISTUMISEGA SÜSTEEMIDE ÜLEKANDEFUNKTSIOONID JA SIIRDEPROTSESSID Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 1.7.3, 2.4 ja 2.5.
Nagu näeme oma kursuse käigus, võib süsteemidel olla palju erinevaid
mudeleid . Üks
lihtsamatest mudelitest on nn ülekandemudel, mis seob omavahel ainult sisendeid ja
väljundeid. Seda mudelit saame kasutada vaid siis, kui süsteemil ei ole sisemisi akumu-
latsioone ehk siis juhul, kui
algolek on nulline. Kui need tingimused on täidetud, on süsteemi
sisendi ja väljundi kujutised seotud ülekandefunktsiooniga väga lihtsa seose kaudu:
Y (
s) =
U (
s)
H (
s)
kus
Y(
s) on väljundi kujutis,
U(
s) on sisendi kujutis ja
H(
s) on ülekandefunktsioon.
Eeldades nulliseid algolekuid, saab ülekandefunktsiooni kasutada siirdeprotsesside arvuta-
misel.
Näidisülesanne N 2.1
u(
t)
H(
s)
y(
t)
( 2
s + 2 )
5 (
s − )
8
Antud: sisendsignaal
u t( ) = 2 cos
t5 ja ülekandefunktsioon
H (
s) =
.
2
s ( 2
s +1 )
6
Leida
y(
t).
Kontrollida tulemust piirväärtusteoreemidega.
Lahenduskäik Y (
s) =
U (
s)
H (
s)
sU (
s) =
L[
u(
t ]
2
) =
2
s + 25
2
s( 2
s + 2 )
5 (
s − )
8
2(
s − )
8
ABs +
CY (
s) =
=
=
( 2
s + 2 )
5
2
s ( 2
s +1 )
6
s( 2
s +16)
s( 2
s +16)
2(
s − )
8
Leiame
A resiididega
A =
res= −1
s→
( 2
0
s +16)
−1
Bs +
C− ( 2
s + 1 )
6 +
s(
Bs +
C)
=
s( 2
s + 1 )
6
s ( 2
s + 1 )
6
Kuna kahel võrdsel murrul on võrdsed nimetajad, saame võrdsustada ka lugejad:
2
s − )
8
− ( 2
s +1 )
6 +
s(
Bs +
C)
s( 2
s +1 )
6
s( 2
s +1 )
6
8
2
s −16 = −
s2 −16 +
Bs2 +
Cs Kuna kaks polünoomi on võrdsed, siis peavad olema võrdsed ka sama astmenäitajaga
s ees
olevad tegurid mõlemal pool võrrandit:
2
s 0 = −1+
B, siit
B = 1
s 2 =
C Vabaliikmete võrdsus on kontrolliks.
Märkus: peale osamurdudeks jagamist, kui osa tundmatuid õnnestub
lugejas leida resiidide
kaudu, saame alati võrrandeid rohkem kui tundmatuid. Seega on alati olemas ka kontrollimise
võimalus:
−1
s + 2
−1
s4
Y (
s) =
s( 2
s +16)
s( 2
s +16)
2( 2
s +16)
1
−
1
y t( ) =
L [
Y (
s)] = −
1 t( ) + cos
t4 +
sin
t4
2
Siin on
1(
t) Heaviside’i funktsioon
,
1 kui
t > 0
L1 t) =
1
1 t)
−
↔
s ,0 kui
t ≤ 0
Eespool saadud tulemused kontrollime piirväärtusteoreemidega:
1) lim
x(
t) = lim
sX (
s)
t→0+
s→∞
1
1
lim
y(
t) = lim − (
1 t) + cos 4
t +
sin 4
t = −1+1+
0 = 0
t → +
t → +
0
0
2
2
2
s16
2
16
−
−
2
s − )
8
2
2
0 − 0
ss∞ ∞
lim
sY (
s) = lim
s= lim
= 0
s→∞
s→∞
s( 2
s +
16
2
s→∞
s16
1 16
1+ 0
2
2
ss1
∞
Seega saime esimese piirväärtusteoreemi järgi, et 0 = 0.
Märkus: kui
s− >
∞ siis jagame nii lugeja kui ka
nimetaja polünoomide kõik liidetavad läbi
s -ga maksimaalses
astmes ja saame sõltuvalt polünoomide astmetest ühe kolmest variandist:
0 + 0 + 0
+ +
+ 0 +
1 0 0
k0
0 või
=1 või
=
k 1 + 0 + 0
1+ 0 + 0
1+ 0 + 0
2) lim
x(
t) = lim
sX (
s)
t→∞
s→0
1
lim
y(
t) = lim − (
1 t) + cos 4
t +
sin 4
t = −1+ 0 + 0 = −1
t→∞
t→∞
2
2(
s − )
8
−16
lim
sY (
s) = lim
s= −1
s→0
s→
s( 2
0
s +16)
16
Seega saime teise piirväärtusteoreemi järgi, et − 1 = −1.
Märkus: kaks piirväärtusteoreemi ei ole omavahel kuidagi seotud, seega ei maksa ülesande
kontrollimise juures üritada saavutada nende väärtuste omavahelist võrdsust.
9
Näidisülesanne N 2.2
u(
t)
H(
s)
y(
t)
(
s + )
1 −
e sAntud:
H (
s) =
(
s + 2)2 ( 2
s + 4)
u(
t) = δ (
t − )
1
Leida
y(
t),
y(0),
y(∞).
Siin on δ (
t) deltaimpulss ehk Diraci impulss.
Omadused ε
ε
1) ∫δ (
t)
f (
t)
dt =
f ( )
0
2) ∫δ (
t)
dt = 1,
t ∈[ ε
− ,ε ]
−ε
−ε
Lδ (
t) ↔1
Lahendus Y(
s) =
H(
s)
U(
s)
LU (
s) = [
L δ
t( − )
1 ]
−
s=
e , sest
L[δ (
t)] = 1 ja τ−
e s X (
s)
x(
t − τ )
↔
Seega,
(
s + )
1
−2
sY (
s) =
e (
s2
+ 2) (
s2 + 4)
L
s1
+1
Y (
s)
y ( − 2)
↔
t y(
t) =
y (
t − 2) , kus ~
y (
t) = −
L
2
2
(
s + )
2 (
s + )
4
s + 1
As +
BCs +
DY (
s) =
(
s + 2)2 ( 2
s + 4)
2
s + 4
s + 4
2
s + 4
3
As + 4
2
As +
Bs + 4
3
B +
Cs + 4
2
Cs + 4
2
Cs +
Ds + 4
Ds + 4
D =
(
s + 2)2 ( 2
s + 4)
(
A +
C) 3
s + (
B + 4
C +
D) 2
s + (4
A + 4
C + 4
D)
s + 4
B + 4
B(
s + 2)2 ( 2
s + 4)
Järelikult,
A +
C = 0
Lineaarsete võrrandite süsteem: 4 sõltumatut võrrandit, 4 tundmatut.
1
1
1
B + 4
C +
D = 0
Lahendades, saame
A =
,
B = 0 ,
C = −
,
D =
⇐
16
16
4
4
A + 4
C + 4
D = 1
KONTROLLIGE!
4
B + 4
D =1
10
1
s1
s − 4
1
s + 2 − 2
s2
Y (
s) =
−
−
16 (
s + 2)2
16 2
s + 4
16 (
s + 2)
2
2
2
s + 4
2
s + 4
1 1
2
s2
L
1
−2
t−2
t−
−
+ 2
(
e− 2
te− cos(2
t) + 2sin(2
t)) (
t) =
y(
t)
↔
116
s + 2 (
s + 2)2
2
s + 4
2
s + 4
16
Siin on
1(
t) Heaviside’i funktsioon
,
1
kui
t > 0
L1 t) =
,
1
1 t)
−
↔
s ,0 kui
t ≤ 0
1
y(
t) =
y (
t − 2) =
( −2(
t−2)
e− 2 −2(
t−2)
te− cos(2(
t − 2)) + 2sin(2(
t − 2)) (
1 t − 2)
1 16
1
y(0) = 0 , sest (−2) = 0
1
−
t2(
t −2)
1
−2(
t −2)
1
L'Hospita
l
y(∞) = lim
y(
t) =
(0 − lim 2
te− 0 + 0) = − lim
te= − lim
t→∞
16
t →∞
8
t→∞
8
2(
t −2)
t →∞
e L'Hospita
l
1
1
= − lim
= 0
8
t→∞ 2 2(
t−2)
eEespool saadud tulemused kontrollime piirväärtusteoreemidega.
lim
x(
t) = lim
sX (
s)
Piirväärtusteoreemid:
t →0+
s→∞
lim
x(
t)
lim
sX (
s)
t →∞
s→0
s(
s + )
1
2
−
sssy(0) = lim
sY (
s) = lim
2
e= lim
s→∞
s→∞ (
s + 2)2 ( 2
s + 4)
→∞ ( 4
s + 4 3
s + 8 2
s + 16
s + 16) 2
sse 1
1
+ −
s 1
= lim
= 0
−
−
→∞
ss
( 2
s + 4 1
s + 8 + 16 1
s+16 2
s ) 2
e∞
s(
s + )
1
−2
s0
y(∞) = lim
sY (
s) = lim
e= 0
s→0
s→
(
s + 2)2
0
( 2
s + 4)
16
11
Ülesanded iseseisvaks lahendamiseks
IL 2.1 Antud: väljund
y(
t) ja ülekandefunktsioon
H (
s)
−
2
s + )
2
t4
−
ty t( ) = 3 ×
1 t( ) − 2
e−
e H (
s) =
s (
s + )
1
Leida
sisend u(
t) ning selle alg- ja lõppväärtused.
IL 2.2 Antud: ülekandefunktsioon
H (
s) ja sisend
u(
t)
(
s + )
1
e−
sH (
s) =
,
u(
t) = (
1 t − 2)
(
s 2 + 4)
sLeida
y(
t),
y(0),
y(3)
IL 2.3 Antud: ülekandefunktsioon
H (
s) ja sisend
u(
t)
( 3
s + )
1
2
−
e sH (
s) =
,
u(
t) = δ (
t − )
1
s(
s + )
2 (
s + )
3
Leida
y(
t),
y(1),
y(∞)
IL 2.4 Antud: ülekandefunktsioon
H (
s) ja sisend
u(
t)
sH (
s) =
,
u(
t)
−(
t 4)
−
e1 t − 4)
(
s + )
1 ( 2
s + 5
s + 6)
Leida
y(
t),
y(0),
y(3),
y(4),
y(7),
y(6) y(∞)
IL 2.5 Antud: ülekandefunktsioon
H (
s) ja sisend
u(
t)
s + −
e sH (
s) =
,
u(
t) = (
1 t − )
1
2
s + 4
s + 5
Leida
y(
t),
y(0),
y(1),
y(∞)
12
3. SÜSTEEMIDE KOMPOSITSIOON
Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 2.4.
Kõige lihtsamad kahe süsteemi ühendamise viisid on järgmised:
• järjestikune, kus ülekandefunktsioonid korrutuvad:
Y (
s) =
H (
s)
H (
s)
U (
s)
2
1
• paralleelne, kus ülekandefunktsioonid liituvad:
Y (
s) = (
H (
s) +
H (
s))
U (
s)
1
2
•
H (
s)
tagasisidestatud , kus
Y (
s)
1
U (
s)
1−
H (
s)
H (
s)
2
1
Kasutades neid kolme ühendamisviisi, saame komponeerida küllaltki keerulisi süsteeme,
mille ühised ülekandefunktsioonid leiame nende valemite kaudu.
Näidisülesanne N 3.1
Kolm süsteemi on ühendatud järgmise skeemi järgi. On teada nende ülekandefunktsioonid
H1(
s),
H2(
s),
H3(
s) ja kaks
sisendit u(
t),
n(
t). Leida süsteemide kompositsiooni väljund
y(
t).
n(
t)
+
u(
t)
H+
1(
s)
H2(
s)
y(
t)
–
+
H3(
s)
40(
s + 50)
10
Antud:
H (
s) =
H (
s) =
H (
s) =
1
3
s + 40
2
s(
s + 50)
u(
t) = 2 ⋅ (
1 t)
n(
t) = δ (
t)
Leida
y(
t),
y(0),
y(∞)
Lahenduskäik H H1
1
2
H;
H uy1 +
H Hny1 +
H H2
3
2
3
Y (
s) =
H (
s)
U (
s) +
H (
s)
N (
s)
uyny400
400
2
s + 40
s + 400
H H =
H H =
; 1 +
H H = 1 +
1
2
2
3
s(
s + 40)
2
3
s(
s + 4 )
0
s(
s + 4 )
0
400
s(
s + 40)
400
H (
s) =
⋅
uys(
s + 40)
2
s + 40
s + 400
2
s + 40
s + 400
s(
s + 40)
H (
s) =
ny2
s + 40
s + 400
13
2
U (
s) =
L[
u t( )] = [
L 2 ⋅
1 t( )] =
sN (
s) = [
L n(
t)] = [
L δ (
t)] = 1
800
s(
s + 40)
Y (
s) =
s( 2
s + 40
s + 400)
2
s + 40
s + 400
800
ABs +
C⇒
A = 2 ;
B = −2 ;
C = 8
− 0 (Kontrollige!)
s( 2
s + 40
s + 400)
s( 2
s + 40
s + 400)
L800
2
s + 40
2
1
20
−20
t−20
t= − 2
= − 2
2 −
e2
− 4
t0
e
↔
s(
s 2 + 40
s + 40 )
0
s(
s2
+ 2 )
0
ss + 20
(
s2
+ 2 )
0
2
Ls(
s + 4 )
0
s + 40
s + 400 − 400
400
−20
t=1−
t( ) − 40
t0
e↔δ
s 2 + 40
s + 400
(
s2
+ 2 )
0
(
s2
+ 2 )
0
2
− 0
t2
− 0
t2
− 0
ty t( ) = 2 − 2
e− 4
t0
e+ δ
t( ) − 40
t0
e y( )
0 = lim(2 −
−
2 20
et −
−
40
20
tet + δ (
t) −
−
400
20
tet ) = 2 − 2 + limδ (
t) = 0 + limδ (
t) = ∞
t →0
t →0
t→0
y(∞) = lim(2 − 2 2
− 0
te− 40 2
− 0
tte+ δ (
t) − 400 2
− 0
tte) = 2
t→∞
Kontrollime piirväärtusteoreemidega:
800
2
s (
s + 4 )
0
3
s +
2
sy( )
0 = lim
sY (
s) = lim
= 0 +
40
lim
= ∞
s→∞
s→∞
2
2
s + 40
s + 400
s + 40
s +
s→∞
400
2
s + 40
s +
400
800
2
s (
s + 4 )
0
800
y(∞) = lim
sY (
s) = lim
= 2
s→
s→
2
0
0
s + 40
s + 400
2
s + 40
s + 400
400
14
Ülesanded iseseisvaks lahendamiseks IL 3.1 Kaks süsteemi ülekandefunktsioonidega
H1(
s)
ja H2(
s)
on ühendatud järjestikku. Leida
nendest koostatud süsteemi ülekandefunktsioon
H(
s), impulsskaja
h(
t) ja hüppekaja
g(
t) ning
nende väärtused kohal .
∞
y(
t)
u(
t)
H1(
s)
H2(
s)
10(
s + 20)
5
Antud:
H (
s) =
,
H (
s) =
1
s + 40
2
s + 20
Leida
H(
s),
h(
t),
g(
t),
h(∞),
g(∞)
IL 3.2 Kaks süsteemi ülekandefunktsioonidega
H1(
s)
ja
H2(
s)
on ühendatud paralleelselt. Leida
nendest koostatud süsteemi ülekandefunktsioon
H(
s), impulsskaja
h(
t) ja hüppekaja
g(
t) ning
nende väärtused kohal .
∞
H 1(
s)
u(
t)
y(
t)
H 2(
s)
s + 1
2
Antud:
H (
s) =
,
H (
s) =
1
s + 2
2
s + 5
Leida
H(
s),
h(
t),
g(
t),
h(∞),
g(∞)
IL 3.3 Kaks süsteemi ülekandefunktsioonidega
H1(
s)
ja
H2(
s)
on ühendatud positiivse
tagasisidega .
Leida nendest koostatud süsteemi ülekandefunktsioon
H(
s), impulsskaja
h(
t) ja hüppekaja
g(
t)
ning nende väärtused kohal .
∞
u(
t)
+ H1(
s)
y(
t)
+ H 2(
s)
15
10(
s + 20)
5
Antud:
H (
s) =
,
H (
s) =
1
s + 40
2
s + 20
Leida
H(
s),
h(
t),
g(
t),
h(∞),
g(∞)
IL 3.4 Kaks süsteemi ülekandefunktsioonidega
H1(
s)
ja
H2(
s)
on ühendatud negatiivse tagasisidega.
Leida nendest koostatud süsteemi ülekandefunktsioon
H(
s), impulsskaja
h(
t) ja hüppekaja
g(
t)
ning nende väärtused kohal .
∞
u(
t)
+ H1(
s)
y(
t)
– H 2(
s)
10(
s + 20)
5
Antud:
H (
s) =
,
H (
s) =
1
s + 40
2
s + 20
Leida
H(
s),
h(
t),
g(
t),
h(∞),
g(∞)
IL 3.5 Kolm diskreetaja süsteemi on ühendatud järgmise skeemi järgi.
u(
t)
H+
1(
z)
H2(
z)
y(
t)
–
–
H3(
z)
− (
3
z −
1
0
z − 9
0
z − 5
0
Antud:
H (
z) =
,
H (
s) =
,
H (
s) =
,
u(
k) = 1 ∀
k ≥ 0
1
z − 9
0
2
3
z + )2
1
z − 9
0
Leida
H (
z ,
) staatiline ülekandetegur,
y(
k k
ui
k =
∞
3
2
1
0
uy IL 3.6 Pidevaja MISO süsteem on koostatud
lihtsatest SISO süsteemidest.
16
u2(
t)
–
u1(
t)
H1(
s)
+
H2(
s)
H3(
s)
y(
t)
–
H4(
s)
s + 2
2
1
2
s + 4
Antud:
H (
s) =
,
H (
s) =
,
H (
s) =
,
H (
s) =
1
s + 4
2
s + 2
3
s4
s + 4
u (
t) = (
1 t)
n(
t) = 2δ (
t)
1
Leida
y(
t)
IL 3.7 Kolm diskreetaja süsteemi moodustavad süsteemide kompositsiooni.
u(
t)
+
H+
1(
z)
H2(
z)
y(
t)
–
–
H3(
z)
−
1
k =
3
z −
1
0
z −
9
0
z − 5
0
0
Antud:
H (
z) =
,
H (
z) =
,
H (
z) =
,
u(
k) =
1
z − 9
0
2
2
(
z + )
1
2
z − 9
0
,
0
k ≥ 0
Leida
Huy(
z), staatiline ülekandetegur,
y(
k),
kui
k = 0, 1, 2, 3, 4, ∞
17
4. LINEAARSE PIDEVAJA SÜSTEEMI OLEKUMUDEL, SELLE LAHEND JA MAATRIKSEKSPONENDI LEIDMINE Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 3.1–3.3.
Olekumudel avaldub üldkujul järgmise valemi kaudu:
X& (
t) = (
A t)
X (
t) +
B(
t)
U (
t)
Y (
t) =
C(
t)
X (
t) +
D(
t)
U (
t)
Selle võrrandisüsteemi lahendamisel saame
t
X (
t) =
eAt X (0) + ∫
A(
t−τ)
eBU (τ )
dτ
0
tAtA(
t −τ )
Y (
t) =
Ce X (0) +
C eBU (τ )
dτ +
∫
DU (
t)
0
Selles lahendis olevat maatrikseksponenti saame leida kahel meetodil:
1) kasutades Laplace’i teisendust
At
L1
e
←
→
sE)−
−
A 2) spektraallahutuse meetodil (Sylvester-
Lagrange ’i valem)
nAtλ
tie= ∑
Z e i1
i =1
n(
A − λ
E∏
kkus
kZ= 1
i1
n∏(λ − λ )
ikk =1
k ≠
iNäidisülesanne N 4.1 Antud: süsteemne
maatriks A 0 −5 4
A = 2 −5 2
1 1 −
3
Leida maatrikseksponent
Ate Lahenduskäik 1. Laplace’i teisenduse meetodiga:
0 − 5
4
ss− 4
A = 2 − 5 2
(
sE − )
A = − 2
s + 5 − 2
1
1
−
3
−1
−1
s +
3
det(
sE – A) = … = (
s + 3)(
s + 1)(
s + 4)
18
1
−
1
(
sE − )
A (
s + )
1 (
s + )
3 (
s + 4)
(
s + )
5 (
s + )
3 − 2
− (
5
s + )
3 + 4
−10 + 4(
s + )
5
2(
s + )
3 + 2
s(
s + )
3 − 4
2
s + 8
2 +
s + 5
s − 5
s(
s + )
5 +10
s2 + s
8 +13
− s
5 −11
s
4 +10
1
2
s
2 + 8
s + s
3 − 4
s
2 + 8
=...=
s
( + )
1 s
( + )
3 s
( + )
4 s + 7
s − 5
s2 + s
5 +
10
6 − 6 6
− 2
4
− 2
− 3
9
− 6
1
1
1
1
1
1
⋅
6
− 6 6 +
⋅
2
− 4
2
⋅
3
0
0
s +1 6
s + 3 − 2
s +
4 3
6
− 6 6
4
4
4
3
− 9
6
1 − 1
1
1
− 2
1
− 1
3
− 2
1
1
1
1
− 1 1 +
− 1
2
− 1 +
0
0
0
6
s + 3
s +
4
1
− 1
1
− 2
4
− 2
1
− 3
2
Vastus 1
1
− 1
1 −2 1
1
−
3
−2
At
L
1
−
At
t−
− t3
4
− t
e
← → s
( E− )
A ;
e = 1
1
− 1 ⋅e + 1
−
2
1
− ⋅e + 0
0
0 ⋅e
1
1
− 1
−2 4 −2
1 −3 2
2. Spektraallahutuse meetodiga (Sylvester-Lagrange’i valem):
At
e
∑n λ
t
z e
1
i
i=1
5
− 4
λE − A == − 2 λ + 5
− 2
−1
−1
λ + 3
det λE − A = (λ + )
3 (λ + )
4 (λ + )
1
λ = 3
−
1
λ = 4
−
2
λ = 1
−
3
4
− 5 4 1 − 5
4
2
−1 2 ⋅ 2 − 4
2
(
A − λ
E)(
A − λ
E)
1
1
1 1
1
− 2
i =
1
z =
2
3
=
1
i(λ − λ )(λ − λ )
(−3 + 4)(−3 + )
1
1
2
1
3
19
− 2
4
− 2
2
− 4
2
1
− 2
1
4
− 8
4
= −1
2
−1
− 2
− 2
4
− 2
3
− 5 4 1 − 5
4
2
− 2 2 ⋅ 2 − 4
2
(
A − λ
E)(
A − λ
E)
1
1
0 1
1
− 2
i =
,
2
z =
1
3
=
2
i(λ − λ )(λ − λ )
(−4 + )
3 (−4 + )
1
2
1
2
3
− 3
9
− 6
0
0
0
−1
3
− 2
3
− 9
6
= 0
0
0
3
1
− 3
2
3
− 5 4 4 − 5 4
6
− 6 6
2
− 2 2 ⋅ 2 −1 2
6
− 6 6
1 −1 1
(
A − λ
E)(
A − λ
E)
1
1
0 1
1
1
6
− 6 6
i = ,
3
1
2
z =
= 1 −1 1
3
i (λ − λ )(λ − λ )
( 1
− + )
3 (−1 + 4)
6
3
1
3
2
1 −1 1
Vastus nAteλ
tz e∑ 1
ii 1
1
− 2
1
−1
3
− 2
1 −1 1
−3
te−1
2
−1
−4
te0
0
0 + −
te 1 −1 1
− 2
4
− 2
1
− 3
2
1 −1 1
Nagu näha, saime kahel meetodil samad tulemused.
Märkus: nagu näha kahe meetodi võrdusest, võib omaväärtuste (polünoomi juurte)
nummer -
damise järjekord olla
suvaline . Sellest sõltub vaid lõpptulemuses olevate
liidetavate järjekord.
20
Ülesanded iseseisvaks lahendamiseks IL 4.1 Leida kahel meetodil maatrikseksponent
Ate maatriksi
А jaoks
0
1
0
A = 0
0
1
− 6 −11 − 6
IL 4.2 Leida maatrikseksponent
Ate maatriksi
А jaoks
− 2
0
0
A = 1 − 7 4
1
− 3 0
IL 4.3 Leida maatrikseksponent
Ate maatriksi
А jaoks
− 3 − 2 −1
A = 1
0
−1
0
0
− 4
IL 4.4 Leida maatrikseksponent
Ate maatriksi
А jaoks
− 2 −1
0
A = − 2 − 3 0
3
− 3 −
5
21
5. DIFERENTSIAALVÕRRANDITE SÜSTEEMI JA OLEKUMUDELI SEOS Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 2.1 ja K. Ogata raamatust
ptk. 3.5.
Selles peatükis
vaatleme seda, kuidas teisendada süsteemi kirjeldust diferentsiaalvõrrandite
süsteemi kaudu kirjelduseks olekumuutujate kaudu. Samas tuletame meelde ka
matemaatika -
kursusest teadaolevate diferentsiaalvõrrandite süsteemide teisendusi (
n järku diferentsiaalvõr-
randi teisendamine esimest järku võrrandite süsteemiks, milles on
n võrrandit).
Näidisülesanne N 5.1 Süsteem on antud diferentsiaalvõrrandite süsteemi abil:
2
d y (
t)
1
= −
u(
t) +
y (
t)
2
2
dt 2
d y (
t)
2
= 2
u(
t)
2
dtLeida selle süsteemi olekumudel
X& =
AX +
BU
Y =
CX +
DUkui kaks olekut on valitud järgmiselt:
x (
t) =
y (
t)
1
1
(*)
x (
t) =
y (
t)
2
2
Lahenduskäik Määrame antud süsteemi järgu. Selleks on 4 (kõigi võrrandite maksimaalsete järkude summa).
Seega, kuna 2 olekut meil juba on, võime valida veel 2 olekut, kuid mitte meelevaldselt.
Näiteks loogiline on valida neid
olekuid nii:
( )
( )
x t( ) =
dx t1
=
dy t1
3
dtdt (**)
dx t( )
dy t( )
2
2
x t( ) =
4
dtdtMärkus: seda
laadi valik ei ole ühene, seega ka kogu lahenduskäik ei ole ühene, vastus ei ole
ühene ja järelikult ka olekumudel ei ole ühene. Kuid need mudelid on alati sama järku!
Kui puuduvat kahte olekut valida just sel moel (**), siis diferentseerides neid kahte võrrandit
ja võrdsustades esimesed ja
kolmandad liikmed, saame
dx (
t)
2
d y t3
( )
1
= −
u(
t) +
y (
t) = −
u(
t) +
x (
t)
2
2
2
dtdt (***)
dx (
t)
2
d y (
t)
4
2
= 2
u(
t)
2
dtdt22
Pannes võrrandid (**) ja (***) kokku, saame süsteemi:
dx (
t)
1
=
x (
t)
3
dt
dx (
t)
2
x (
t)
4
dt
dx (
t)
3
= −
u(
t) +
x (
t)
2
dt
dx (
t)
4
= 2
u(
t)
dtSellele võrrandisüsteemile lisame võrrandisüsteemi (*)
y (
t) =
x (
t)
1
1
y (
t) =
x (
t)
2
2
ja läheme üle maatrikskujule
x&1 0 0 1 0
x1 0
x&2 0 0 0 1
x2 0
u
x& 0 1 0 0
x −
1
3
3
x&4 0 0 0 0
x4 2
x1
y1 1 0 0 0
x2
0
u
y0
1
0
0
x
2
3
0
x4
Kokku saame süsteemi kujul
X& =
AX +
BU
Y =
CX +
DUmis ongi otsitav olekumudel, kus maatriksid on vastavalt
0 0 1 0
0
0 0 0 1
0
1 0 0 0
0
A =
,
B =
,
C =
ja
D =
0
1
0
0
−
1
0 1 0 0
0
0 0 0 0
2
Näidisülesanne N 5.2 Süsteemi kirjeldab diferentsiaalvõrrandite süsteem
dx (
t)
1
= 10
x (
t) − 2
x (
t) + 7
u(
t)
1
2
dt
dx (
t)
2
=
x (
t) +12
u(
t)
1
dt
y (
t) = 2
x (
t)
1
2
y (
t) = 11
x (
t) + 3
x (
t)
2
1
2
23
Leiame selle süsteemi olekumudeli
X& =
AX +
BU
Y =
CX +
DUTähistused
n – süsteemi siseolekute arv;
r – süsteemi sisendite arv;
m – süsteemi väljundite arv;
xx t1
( )
1
X =
–
n ×1 süsteemi siseolekute
vektor ;
xx t2
( )
2
U =
u =
u(
t) –
r ×1 süsteemi sisend;
yy t1
( )
1
Y =
–
m ×1 süsteemi väljundite vektor;
yy t2
( )
2
dx t( )
1
x&
x&
t( )
1 1
X& =
=
dt
–
n ×1 siseolekute tuletiste vektor;
x&
2
x t( )
2
dx t( )
2
dt
A –
n ×
n olekutemaatriks (süsteemimaatriks);
B –
n ×
r sisenditemaatriks;
C –
m ×
n väljunditemaatriks;
D –
m ×
r otsesidemaatriks.
Lahenduskäik
x& = 10
x − 2
x +
7
u
x&1 10 − 2
x1 7
1
1
2
u
x& =
x + 0
x +
u12
maatriksk ju ul
x&2 1
0
x2 12
2
1
2
⇒
y = 0
x + 2
x +
u0
y1 0 2
x1 0
1
1
2
u
y =
x11
+ 3
x +
u0
y11 3
x0
2
1
2
2
2
järelikult,
10 − 2
7
X& =
X +
U
1
0
12
10 − 2
7
0 2
0
ning seega
A =
,
B = ,
C =
ja
D =
0 2
0
1
0
12
11 3
0
Y =
X +
U
11 3
0
24
Ülesanded iseseisvaks lahendamiseks IL 5.1 3
d y(
t)
Leida süsteemi
= −2
u(
t) olekumudel, valides olekumuutuja
x (
t) järgnevalt:
3
1
dtx (
t) =
y(
t)
1
IL 5.2 4
d y(
t)
Leida süsteemi
= 3
u(
t) olekumudel, valides kaks olekumuutujat järgnevalt:
4
dt
x t( ) =
y t( )
1
dx t( )
x t( ) =
1
2
dtIL 5.3
dx (
t)
1
− 2
x (
t) =
x (
t) + 3
u(
t)
1
2
dtLeida süsteemi
olekumudel, valides väljundi
y(
t) järgnevalt:
2
d x (
t)
dx (
t)
2
2
+ 4
=
x (
t)
1
2
dtdt2
d x (
t)
2
y(
t) =
+ 3
x 2
1
dtIL 5.4
x& (
t) =
x (
t) + 2
x (
t) +
u (
t)
1
1
2
2
x& (
t) =
x (
t) + 3
x (
t) +
u (
t)
Leida süsteemi 2
2
3
3
olekumudel.
x& (
t) =
x (
t)
3
2
y(
t) =
x (
t) +
x (
t) +
x (
t) +
u (
t) + 2
u (
t)
1
2
3
1
3
IL 5.5
x& (
t) =
x (
t) +10
x (
t) + 2
u (
t) −
u (
t)
1
1
2
1
2
x& (
t) = 2
x (
t) −
x (
t) + 2
u (
t)
2
1
3
3
Leida süsteemi
x& (
t) = 3
x (
t) +
u (
t)
olekumudel.
3
3
2
y (
t) =
x (
t) +
u (
t)
1
2
1
y (
t) = 2
x (
t) +
x (
t) − 5
u (
t) +
u (
t)
2
1
3
3
1
25
6. ÜLEKANDEKARAKTERISTIKUD
Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 2.6.
Süsteemide omaduste
uurimisel süsteemi sisendisse antakse tihti järgmisi testsignaale:
• ühikhüppe, seega
u(
t) = (
1 t .
) Sellisel juhul nimetatakse väljundit hüppekajaks ja
tähistatakse
g (
t ;
)
• δ-impulss ehk Diraci impulss, seega
u(
t) = δ (
t). Sellisel juhul nimetatakse väljundit
impulsskajaks ja tähistatakse
h(
t).
1
−
( )
LH sTänu sellele, et
L1
1 t)
−
← →
s , saame
g t( )
← →
s H (
s) =
sTänu sellele, et δ ( )
←
Lt→1, saame
h(
t)
L
← →
H (
s)
Hüppekaja ja impulsskaja on omavahel seotud järgmiselt:
dg(
t)
th(
t) =
+
g(0)δ (
t)
g t( ) =
g( )
0 + ∫
h(τ )
dτ
dt0
mis g(0) = 0 puhul lihtsustub kujuni
dg t( )
th t( ) =
ja
g t( ) =
h(τ ) τ
d∫
dt0
Näidisülesanne N 6.1 Leiame ülekandefunktsiooni järgi hüppekaja ja impulsskaja ning nende alg- ja lõppväärtused.
12 5
(
s − )
8
Antud:
H (
s) =
2
s + 20
s + 96
Leida
g(
t ,
)
h(
t ,
)
g(0 ,
)
h(0 ,
)
g(∞ ,
)
h(∞)
Lahenduskäik Hüppekaja on süsteemi väljundreaktsioon
g(
t) sisendisse (hetkel
t = 0) antud ühikhüppe-
lisele signaalile
u(
t) = (
1 t .
)
1
Sisendi Laplace’i teisendus annab
U (
s) =
L(
u t( )) =
L(
1 t( )) =
s12 5
(
s − )
8
1
Y (
s) =
H (
s) ⋅
U (
s) =
⋅
s 2 + 20
s + 96
sSeega,
1
H (
s)
g t( ) = −
L
s
H (
s)
12 5
(
s − )
8
1
18
17
L= − +
−
⇔
g(
t) = (−1+18 −8
e t −17 1
− 2
et ) (
1 t)
ss(
s + )
8 (
s +12)
ss + 8
s +12
g(0) = 1
− +18 −17 = 0
26
g(∞) = −1 + 18 ⋅ 0 − 17 ⋅ 0 = −1
Kasutades piirväärtusteoreeme, saame
H (
s)
12 5
(
s − )
8
g(0) = lim
g(
t) = lim
sG(
s) = lim
s= lim
H (
s) = lim
= 0
2
t→+0
s→∞
s→∞
s→∞
s→∞
ss + 20
s + 96
12 5
(
s − )
8
12 ⋅ 8
g(∞) = lim
g(
t) = lim
H (
s) = lim
= −
= 1
−
2
t→∞
s→0
s→0
s + 20
s + 96
96
Impulsskaja on süsteemi väljundreaktsioon
h(
t) sisendisse ajahetkel
t = 0 antavale ideaalsele
impulsile
u(
t) = σ (
t .
)
Sisendi Laplace’i teisendus
U (
s) =
L(
u(
t)) =
L(σ (
t)) = 1
Y (
s) =
H (
s) ⋅
U (
s) =
H (
s)
h(
t)
1
L−
(
H (
s))
12 5
(
s − )
8
144
204
LH (
s) =
= −
⇔
h(
t) = (−144 8
e−
t + 204 1
− 2
et ) (
1 t)
(
s + )
8 (
s + 12)
s + 8
s + 12
h(0) = 1
− 44 + 204 = 60
h(∞) = 0
Kontrollime piirväärtusteoreemidega:
12
s 5
(
s − )
8
60 2
s − 96
sh(0) = lim
sH (
s) = lim
= lim
= 60
2
s→∞
s→∞
s + 20
s + 96
2
s→∞
s + 20
s + 96
60 2
s − 96
sh(∞) = lim
sH (
s) = lim
= 0
2
s→0
s→0
s + 20
s + 96
Märkus: kui hüppekaja on teada, siis impulsskaja leidmine on väga lihtne.
Impulsskaja on
hüppekaja tuletis . Seda seost on väga mugav kasutada ka tulemuste kontrollimiseks.
Kontrollime:
′
g′
t( ) = (
8
−
t1
− 2
t−1+1
e8
−17
e−8
t1
− 2
t−8
t1
− 2
t= 0 − 8 ⋅1
e8
−12 ⋅ (−17)
e= −14
e4
+ 20
e4
m.o.t.t.
27
Ülesanded iseseisvaks lahendamiseks IL 6.1 On teada süsteemi ülekandefunktsioon:
2
s + 3
H (
s) =
2
s + 2
s + 5
Leida selle süsteemi impulsskaja ja hüppekaja ning nende alg- ja lõppväärtused.
IL 6.2 On teada süsteemi ülekandefunktsioon:
10
s 2 − 32
s + 96
H (
s) =
s 4 + 2
s3 +16
s 2 + 32
sLeida süsteemi impulsskaja ning selle alg- ja lõppväärtused.
IL 6.3 Süsteemi sisendisse ülekandefunktsiooniga
H(
s) anti deltafunktsioon
δ(
t). Milline signaal on
süsteemi väljundis? Leida selle signaali väärtused ajahetkel
t = 0 ja
t =
∞
( 3
s −8 2
s − 48
s + 64)
H (
s)
=
s(
s + 2)( 2
s + 16)
IL 6.4 Leida hüppekaja
g(
t) ülekandefunktsiooni
H(
s) järgi.
(9 3
s +20 2
s +78
s +8 )1
H (
s)
= (
3
s + 3 2
s + 9
s + 27)
28
7. OLEKUMUDELI JA ÜLEKANDEMUDELI SEOS. ÜLEKANDEFUNKTSIOONIDE, IMPULSSKAJADE JA
HÜPPEKAJADE MAATRIKSID Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 3.5.
Kui on tegemist süsteemiga, millel on mitu sisendit ja mitu väljundit, siis sellel süsteemil on
ülekandefunktsiooni, impulsskaja ja hüppekaja asemel ülekandefunktsioonide, impulsskajade
ja hüppekajade maatriksid.
Ülekandefunktsioonide maatriks:
H (
s) =
C(
sE −
A −1
)
B +
D Impulsskajade maatriks:
H (
t) =
Ce At B +
D Hüppekajade maatriks:
G t( ) =
CA−1(
e At −
B)
B +
D Näidisülesanne N 7.1 Antud: süsteem on antud oma olekumudeliga:
3 2
0 1
1
−
1
A =
B =
C =
2
3
1
0
−1 1
Leida süsteemi impulsskajade maatriks
H (
t .
)
Lahenduskäik 1. Leiame kõigepealt maatrikseksponendi Laplace’i teisenduse kaudu:
s − 3
− 2
det(
sE −
A =
det
= ( − )
3 2
s− 4 =
(
s − )
1 (
s − )
5 ;
s = ,
1
s = 5
− 2
s −
3
1
2
s − 3
− 2
1
s − 3
−
2
(
s − )
1 (
s − )
5
(
s − )
1 (
s −
At
L1
5
e
←
→
sE)−
−
A 1
(
sE)−
−
A =
=
=
(
s − )
1 (
s − )
5 − 2
s −
3
− 2
s − 3
(
s − )
1 (
s − )
5
(
s − )
1 (
s − )
5
1
1
1
1
−
2 +
2
2 + 2
1 1
−
1
1 1
1
= (
s − )
1
(
s − )
5
(
s − )
1
(
s − )
5
←
L→
te +
te5 =
Ate
1
1
1
1
2 −1 1
2 1
1
−
2
2
2
2
(
s − )
1
(
s − )
5
(
s − )
1
(
s − )
5
2. Nüüd leiame spektraallahutuse meetodil maatrikseksponendi ja näitame, et mõlemad mee-
todid annavad sama tulemuse:
λ − 3
− 2
det(
λE −
A =
det
= ( − )
3 2
− 4 =
(λ − )
1 (λ −
5 λ = ,
1 λ = 5
− 2
λ −
3
1
2
29
n(
A − λ
E∏
kkZ= 1
i1
n∏(λ −λ )
ikk =1
k ≠
i− 2
1
−
1
2
1
Ζ =
1
11
1− 5
2 2
2
2
5
Ζ =
2
21
5 − 1
n1 1
−
1
1 1
1
Atλ
tie= ∑
Z e ;
Ate =
te +
te5
1
i
2 −1
1
2 1 1
i 1
3. Nüüd leiame süsteemi impulsskajade maatriksi
H (
t .
)
1
−
1
1 1
−
1
1 1
1
0 1 −1 1
H t( )
Ce AtB =
(
te +
te5 )
=
te +
−1 1 2 −1 1
2 1
1
1 0 1
−
1
0 0
−1 1
+
te5 =
te 0 0
1
−
1
Märkus: antud süsteemil on 2 sisendit ja 2 väljundit, seega on ka loogiline, et me saime
impulsskajade maatriksi, mis koosneb neljast elemendist:
Η ( )
Ηt(
t)
11
12
H (
t) =
Η ( )
Ηt(
t)
21
22
H (
t)
esimesest sisendist esimesse väljundisse,
11
H (
t) teisest sisendist teise väljundisse,
22
H (
t) teisest sisendist esimesse väljundisse,
12
H (
t) esimesest sisendist teise väljundisse.
21
30
Ülesanded iseseisvaks lahendamiseks IL 7.1 Antud: süsteem on antud oma olekumudeliga:
−1 − 2
1
1 −1
A =
B =
C =
2
− 6
0
2 −
3
Leida süsteemi impulsskajade maatriks
H (
t .
)
H t( )
Ce AtB IL 7.2 Antud: süsteem on antud oma olekumudeliga:
−1
0
1
2
2
1
A =
B =
C =
3
− 3
0
− 6
0 −
1
Leida süsteemi ülekandefunktsioonide maatriks
H (
s .
)
H (
s) =
C(
sEA 1
)−
−
B IL 7.3 Antud: süsteem on antud oma olekumudeliga:
3 1
0 1
3
− 6
A =
B =
C =
2
2
1
0
− 6
3
Leida süsteemi impulsskajade maatriks
H (
t .
)
H t( )
Ce AtB IL 7.4 Antud: süsteem on antud oma olekumudeliga:
−1 1
0 1
−1 1
A =
B =
C =
0
2
1
0
1
−
1
Leida süsteemi impulsskajade maatriks
H (
t).
H t( )
Ce AtB 31
8. SIIRDEPROTSESSIDE ARVUTUS DIFERENTSIAALVÕRRANDIST
Selle peatüki teoreetilisi aluseid saab leida K. Ogata raamatust ptk. 2-7.
Sisendi ja väljundi omavahelisi
seoseid kirjeldab pidevaja süsteemi puhul diferentsiaalvõrrand
dyd n ydud mu
f y,
,K,
,
u,
,K,
= 0
(*)
dtdtdtdt
kus
m ≤
n Kui diferentsiaalvõrrand (*) on
n-ndat järku, siis öeldakse, et süsteem on
n-ndat järku.
Lähtudes funktsioonist (*), on võimalik süsteemi täielikult analüüsida ning arvutada siirde-
protsessid ka mittenulliste algtingimuste puhul.
n-ndat järku diferentsiaalvõrrandi lahenda-
miseks on vaja
n algolekut.
Kui
f on lineaarne funktsioon, siis diferentsiaalvõrrandi (*) poolt kirjeldav süsteem on
lineaarne
n-ndat järku pidevaja süsteem.
n-ndat järku diferentsiaalvõrrand on esitatav ka
n esimest järku diferentsiaalvõrrandite süs-
teemi abil.
Süsteemi kirjeldav mudel jaguneb kaheks osaks. Süsteemi sisend tekitab sundliikumist ning
vabaliikumine on põhjustatud mittenulliste algtingimuste poolt (
y(0) ≠ 0 ja
x(0) ≠ 0 ).
Sundliikumise Laplace’i teisendus on ülekandefunktsioon korda sisendi Laplac’i teisendus:
Y (
s) =
H (
s) ⋅
U (
s)
sNäidisülesanne N 8.1 Süsteem on antud diferentsiaalvõrrandiga
3
2
d y t( )
d u t( )
du t( − )
1
+
y t( ) = 2
+ 3
dt3
dt2
dt
y( )
0 = 1
y&( )
0 =
0
u t() = sin
t Leida impulsskaja
h(
t), hüppekaja
g(
t), sundliikumise võrrand
y (
t ,
) vabaliikumise võrrand
sy (
t ,
) süsteemi väljund
y(
t) ning väljundi alg- ja lõppväärtused
y(0 ,
)
y(∞ .
)
vLahenduskäik nd x(
t)
n−2
n 1
−
L⇔
dxdxdxns X (
s)
n 1
−
−
s x(0)
n−2
−
s(0) − K −
s(0) −
(0)
nn−2
n 1
−
dtdtdtdt3
d y(
t)
L3
2
3
2
⇔
s Y (
s) −
s y(0) −
sy&(0) −
y(
& 0) =
s Y (
s) −
s 3
dt u(
t) = sin
t ⇒
u(0) = sin 0 = 0
u&(
t) = sin′
t = cos
t ⇒
u&(0) = cos 0 = 1
32
2
d u(
t)
L 2
⇔
s U (
s) −
su(0) −
u&(0)
2
=
s U (
s) −1
2
dtdu(
t − )
1
L−
sdu(
t)
⇔
e L
=
e−
s (
sU (
s) −
u(0)) =
e−
s sU (
s)
dt
dt
Rakendades Laplace’i teisendust diferentsiaalvõrrandile, saame
d 3
y t( )
d 2
u t( )
du t( − )
1
+
y t( ) = 2
+ 3
dt 3
dt 2
dt ⇓
L 3
s Y (
s)
2
−
s +
Y (
s) = 2 2
s U (
s) − 2 + 3
e−
s sU (
s)
Y (
s)( 3
s + )
1 =
U (
s)(2 2
s + 3
−
se s )
2
+
s − 2
2 2
s + 3
−
s2
ses − 2
Y (
s) =
U (
s) +
3
s + 1
3
s + 1
L1
u(
t) = sin
t ⇔
U (
s) =
2
s + 1
2 2
s + 3
−
s2
ses − 2
Y (
s) = (
3
s + )
1 ( 2
s + )
3
s +
1 4
4 2 4
4 3
1
3
2
1 1
vabaliikum ine
sundliikumine
Sundliikumine näitab, kuidas süsteemi sisend mõjutab tema väljundit. Vabaliikumine näitab
süsteemi väljundi sõltuvust algtingimustest. Ülekandekarakteristikute
eelduseks on nullised
algtingimused. Järelikult, hüpekaja ja impulsskaja arvutamisel me ei arvesta vabaliikumist.
Ainult sundliikumine, kus
u(
t) = (
1 t) hüppekaja puhul ja
u(
t) = σ (
t) impulsskaja puhul.
Järelikult,
2
−
s2
s + 3
se2 1
2
s −1
1
s +1
−
sH (
s) =
=
+ −
e =
s3 +1
3
s +1
s2 −
s +1
s +1
s2 −
s +1
2 1
s − 5
0
+ 2
3
s2
1
2
3
s − 5
0 ) +
2
3
1
s − 5
0
2
−
s+ −
+ 3
e
s2
2
1
2
3
2
3
s − 5
0 ) +
(
s − 5,
0 ) +
2
2
−
−
tt
h(
t)
1
=
L (
H (
s)) 2
0,5
3
=
e + 2
ecos
t ⋅ (
1 t) +
2
3
−(
t− )
t −
t −
1
0,5( 1)
3
+ −
e+
ecos
(
t − )
0,5( 1)
3
1 + 3
esin
(
t − )
1 ⋅ (
1 t − )
1
2
2
2
h(0) =
(1+ 2) = 2
3
h(∞) = ∞
33
2
s−
H ssse1
( )
−1
2
−
3
g(
t) =
L
=
L
s
s( 3
s + )
1
2
−
s−
sH (
s)
2
s + 3
se2
se3
2
1
s +1
1
s − 2
= −
+
−
− =
ss(
s3 + )
se1
s3 +1
s3 +1
3
s +1
s2 −
s +1
s +1
s2 −
s +1
3
2 1
2
s −
= −
5
0
+ 2 3
2
3
s +
2
2
1
3 (
3
2
3
2
3
s − 5
0 ) +
(
s − 5,
0 ) +
2
2
3
L 1
s − 5
0
2
−
s−
+ 3
e ⇔
s2
2
1
2
3
2
3
s − 5
0 ) +
(
s − 5,
0 ) +
2
2
L 2 −
t 2
0,5
t
2 3
⇔
g t =
3
0,5
t 3
( )
−
e +
ecos
t +
esin
t
⋅ (
1 t) +
2
2
3
3
3
−(
t−
t−
t −
1)
0,5(
1
3
+
e−
ecos
(
t − )
0,5(
1
3
1 + 3
esin
(
t − )
1 ⋅ (
1 t − )
1
2
2
Saab kontrollida, et
h(
t) =
g (
′
t .)
Siirdeprotsessi kirjeldavates
valemites esineb
eksponent positiivses astmes 0,5
te, järelikult on
antud süsteem mittestabiilne ja piirväärtusteoreemid ei kehti.
Kui
u(
t) = sin
t, siis leiame süsteemi väljundi
y(
t ,
) eeldades mittenulliseid algtingimusi:
y(
t) =
y (
t) +
y (
t)
sv2
−
s2
s + 3
se2
s 2
3
sY (
s) =
e−
s(
s3 + )1(
s2 + )1 (
s3 + )1(
s2 + )1 (
s3 + )1(
s2 + )
s1
2
s 2
1 1
2
s + 2
3
s + 3
1 1
s − 5
0 + 5
1
s +1
=
−
=
+ 2
− 3
s3 + )
1 (
s2 + )
1
3
s +1
s2 −
s +1
s2 +1
3
s +1
2
2
s −
) 3
5
0
s +1
4
3
1 1
2
s − 5
0
2 3
sL1
2
−
−
⇔
3
s +1
3
2
2
2
2
2
3
2
1
1
s −
3
5
0
+
(
s − )
ss3
5
0
+
2
2
L1 −
2 0,5
2 3
⇔
e t +
e t3
cos
t +
e0,5
t3
sin
t − cos
t − sin
t2
2
3
3
3
34
3
s1
1
s − 2
3
s − 3
2
s3 + )
1 (
s2 + ) = −
−
=
1
2
s +1
s 2 −
s +1
s 2 +1
1
1
s − 5
0 − 5
1
s1
−
− 2
+ 3
− 3
2
s +1
2
2
2
s − 5
0 )
3
s +1
s +
1
4
1
1
s − 5
0
3
s1
−
− 2
+ 3
− 3
2
2
2
2
2
s +1
2
2
s +1
s +
1
s − 5
0 )
3
+
(
s − 5,
0 )
3
+
2
2
3
1
1
s − 5
0
s1
2
L−
− 2
+ 2 3
+ 3
− 3
⇔
2
2
2
2
2
s +1
s +1
s +
1
s − 5
0 )2
3
+
(
s − 5,
0 )2
3
+
2
2
L1
−
t0,5
t 3
0,5
t 3
⇔ −
e − 2
ecos
t + 2
e3
sin
t + 3cos
t − 3sin
t
2
2
2
2
s−
−
s +
−
se
y (
t)
1
=
Ls(
Y (
s)
s1
2
3
=
L (
3
s + )
1 ( 2
s + )
1
1
−
tt
t
0,5
3
0,5
3
= 3
e + 2
ecos
t + 2 3
esin
t − 3cos
t − 3sin
t ⋅ (
1 t) +
2
2
3
1
−(
t 1
− )
0,5(
t 1
− )
3
+
t −
−
e− 2
ecos
(
t − )
0,5(
1
3
1 + 2 3
esin
(
t − )
1 + 3cos(
t − )
1 −
2
2
2
− 3sin(
t − )
1 ⋅ (
1 t − )
1
2
s − 2
1
1
4
s − 5
Y (
s) =
v −
=
3
s +1
3
s +
2
1
s −
s +1
3
1
1
s − 5
0
2
= −
+ 4
− 2 3
2
2
3
s +
1
(
s − 5,
0 )2
3
+
(
s − 5,
0 )2
3
+
2
2
LY (
s) ⇔
y (
t)
vv1
−
t0,5
t3
0,5
t3
y (
t) =
−
e + 4
ecos
t − 2 3
esin
t ⋅ (
1 t)
v2
2
3
1
−
tt
0,5
3
y(
t) =
y (
t) +
y (
t) =
1sv 2
e + 6
ecos
t − 3cos
t − 3sin
t ⋅ (
t) +
2
3
1
−(
t 1
− )
0,5(
t 1
− )
3
+
t −
−
e− 2
ecos
(
t − )
0,5(
1
3
1 + 2 3
esin
(
t − )
1 + 3cos(
t − )
1 −
2
2
2
− 3sin(
t − )
1 ⋅ (
1 t − )
1
1
y(0) =
(2 + 6 − ) 5
3 =
3
3
y(∞) = ∞
35
Näidisülesanne N 8.2 sLineaarse pidevaja süsteemi ülekandefunktsioon
H (
s) =
. Leiame selle süsteemi
2
s + 3
s + 2
vabaliikumise võrrandi
y (
t ,
) kui on teada, et
y(0) = 1 ja
y&(0) = −1 ning
u(
t) = sin
t.
vLahenduskäik sY (
s)
H (
s) =
, kui
y(0) =
y&(0) =
u(0) = 0
2
s + 3
s + 2
U (
s)
2
s Y (
s) −
sy(0) −
y&(0) + (
3
sY (
s) −
y(0)) + 2
Y (
s) =
sU (
s) −
u(0)
Y (
s)( 2
s + 3
s + 2)−
sy(0) −
y&(0) − 3
y(0) =
sU (
s) −
u(0)
Y (
s)( 2
s + 3
s + 2) =
sU (
s) +
sy(0) +
y&(0) + 3
y(0) −
u(0)
ssy(0) +
y&(0) + 3
y(0) −
u(0)
Y (
s) =
U (
s) +
2
s + 3
s + 2
2
s + 3
s + 2
sY (
s)
sTõepoolest, kui
y(0) =
y&(0) =
u(0) = ,
0 siis
Y (
s) =
U (
s) ja
.
2
s + 3
s + 2
U (
s)
2
s + 3
s + 2
Kui algtingimused on mittenullised, siis tekib vabaliikumine:
sy(0) +
y&(0) + 3
y(0) −
u(0)
s − 1 + 3 − 0
s + 2
s + 2
1
Y (
s) =
v2
s + 3
s + 2
2
s + 3
s + 2
2
s + 3
s + 2
(
s + 2)(
s + )
1
s + 1
−
ty t( ) =
e v36
Ülesanded iseseisvaks lahendamiseks IL 8.1 Süsteem on antud diferentsiaalvõrrandiga
2
d y(
t )
dy(
t)
=
u(
t − )
2
2
dt dt
y( )
0 = 2
y&( )
0 = 0
u(
t) =
−(
t− )
1
e Leida sundliikumise võrrand
y (
t ,
) vabaliikumise võrrand
y (
t ,
) väljundi
avaldis y(
t ,
)
svväljundi väärtused
y1
y(0 ,
)
y(∞) avaldisest
y(
t ,
)
y(0 ,
)
y(∞) kontrolliks kasutage
piirväärtusteoreeme.
IL 8.2 Süsteem on antud diferentsiaalvõrrandiga
2
d y(
t)
du(
t)
+ 4
y(
t) =
2
dtdt
y )
0
= 1
y& )
0
= 2
u(
t) = (
1 t − )
2
Leida diferentsiaalvõrrandi Laplace’i kujutis
Y (
s ,
) impulsskaja
h(
t), hüppekaja
g(
t), sundlii-
kumise võrrand
y (
t ,
) vabaliikumise võrrand
y (
t ,
) süsteemi väljund
y(
t) ning väljundi väär-
svtus
alghetkel y(0 .
)
IL 8.3 Süsteem on antud diferentsiaalvõrrandiga
3
2
2
d y(
t)
d y(
t)
d u(
t − )
3
+ 2
) =
3
2
2
dtdtdt
y( )
0 = 1
y&( )0 =
0
y(
0 =
0
−2(
t−1)
u(
t) =
e
Leida diferentsiaalvõrrandi Laplace’i kujutis
Y (
s ,
) sundliikumise võrrand
y (
t ,
) vabalii-
skumise võrrand
y (
t ,
) süsteemi väljundi avaldis
y(
t ,
) väljundi alg- ja lõppväärtused
y(0 ,
)
vy(∞) avaldisest
y(
t ,
)
y(0 ,
)
y(∞) kontrolliks kasutage piirväärtusteoreeme.
37
IL 8.4 s + 2
On antud lineaarse pidevaja süsteemi ülekandefunktsioon
H (
s) = (
Leida selle
s + )
1 (
s + ) .
3
süsteemi väljundi Laplace’i kujutis
Y (
s) ja piirväärtus
y(∞ ,
) kui
y(0) = 1 ja
y&(0) = 1 ning
u(
t) = 1
−
t−
e .
38
9. DISKREETAJA SÜSTEEMIDE ANALÜÜS
Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 4.
Sisendi ja väljundi omavahelisi seoseid diskreetaja süsteemis kirjeldab
n-ndat järku
diferent -
siaalvõrrand
f (
y(
k),K,
y(
k −
n),
u(
k),K,
u(
k −
m)) = 0 (*)
Lähtudes funktsioonist (*), on võimalik diskreetaja süsteemi täielikult analüüsida ning
arves -
tada ka mittenulliseid algtingimusi.
Kui
f on lineaarne funktsioon, siis diferentsiaalvõrrandi (*) poolt kirjeldatav diskreetaja süs-
teem on lineaarne
n-ndat järku diskreetaja süsteem.
n-ndat järku diferentsiaalvõrrand on esitatav ka
n esimest järku diferentsiaalvõrrandite süs-
teemi abil ja süsteem on esitatav ka olekumudeli kujul. Eeldades nulliseid algolekuid, saame
leida ka ülekandemudeli ning ülekandekarakteristikud.
Näidisülesanne N 9.1 Diskreetset süsteemi kirjeldab lineaarse diferentsiaalvõrrandite süsteem. On antud ka
olekute algväärtused ja
diskreetne sisendsignaal:
1
x ( )
0 = 1
x (
k + )
1 =
x (
k) +
u(
k)
1
2
1
4
x ( )
0 = 0
2
1
x (
k + )
1 = −
x (
k) +
x (
k) +
u(
k )
2
2 1
2
u(
k) = ,
1
k ≥ 0
y(
k) =
x (
k) +
x (
k)
1
2
Leiame selle süsteemi olekumudeli, väljundi väärtused [
y 0 ,
]
1
y [
y 2 ,
]
3
y ja [
y ∞] ning
diskreetse ülekandefunktsiooni.
Lahenduskäik Diskreetse olekumudeli üldkuju:
X (
k + )
1 =
ΦX (
k) +
ΓU (
k)
Y (
k) =
CX (
k) +
DU (
k)
Vaadeldav süsteem on teist järku SISO (ühe sisendiga ja ühe väljundiga) süsteem. Selle
süsteemi puhul
x (
k)
1
1
X (
k) =
– siseolekute vektor,
X (0) = – algolek
x (
k)
0
2
1
0
1
1
X (
k + )
1 =
4
X (
k) +
U (
k)
0
1
Φ4
− 1
, järelikult
,
Γ =
,
C = [1
]1,
D = [0]
1
1
1
1
2
−
1
2
Y (
k) = [1
]1
X (
k) + [0]
U(
k)
39
Esimene võimalus, kuidas leida väljundväärtusi, on kasutada olekumudelit:
Y (0) =
CX (0) = [1
] 1
1 ⋅
= 1
0
1
0
1
1
1
ΦΓ4
X )
1
( =
X (0) +
U (0) =
⋅
⋅1 =
1
0
1
1
−
1
2
2
1
Y )
1
=
CX )
1
= [1 ]
3
1
⋅ 1 =
2
2
1
0
1
9
ΦΓ4
1
X (2) =
X )
1
( +
U )
1
( =
⋅
⋅1 =
1
1
1
8
−
1
2
1
2
9
Y (2) =
CX (2) = [1
17
1
⋅ 8 =
8
1
1
5
0
9
1
ΦΓ4
X3
=
X )
1
( +
U )
1
( =
⋅ 8 +
⋅1 = 4
1
−
1
1
23
1
2
16
5
Y3
=
CX )
3
= [1 ] 4
43
1 ⋅
=
jne
23
16
16
Seega,
y(0) = ,
1
y )
1
( =
5
1
y(2) =
1
2 2 ,
5
y )
3
≈ ,
2 69 jne. Selle meetodiga võib
y(∞)
leidmine osutuda mõnikord väga keeruliseks.
Teine võimalus on rakendada
Z-teisendust:
Zx(
k + )
1 ⇔
zX (
z) −
zx(0)
Rakendame Z-teisendust olekumudelile:
X (
k + )
1 =
ΦX (
k) +
ΓU (
k)
Z
zX (
z) −
zX (0) =
ΦX (
z) +
ΓU (
z)
⇔
Y (
k) =
CX (
k)
Y (
z) =
CX (
z)
Siit saame
zX (
z) −
ΦX (
z) =
ΓU (
z) +
zX (0)
Y (
z) =
CX (
z)
−
ΦzE)
X (
z) =
ΓU(
z) +
zX (0)
, kus
E on ühikmaatriks
Y (
z) =
CX (
z)
X (
z) = ( −
ΦzE)−1
ΓU(
z) + ( −
ΦzE)−1
zX (0)
Y (
z) =
CX (
z)
40
Järelikult,
−
−
Y (
z) =
C(
−
ΦzE) 1
ΓU(
z) +
C( −
ΦzE) 1
1
4
4
4
2
4
4
4
3
1
4
4
4
2
zX4
4
4
3
(0)
sundliikumine
vabaliikum ine
0
Ülekandefunktsioon on süsteemi karakteristik nullistel algolekutel. Kui
X (0) =
siis
0
Y (
s)
H (
z) =
.
U (
s)
Järelikult,
−
H (
z) =
C(
−
ΦzE) 1
Γ
1
1 −
1
z−
z −1
( −
1
1
ΦzE)−
4
4
1
1
1
z −
1
z(
z − )
1 +
−
z
2
8
2
1
1
1
z −1
z −1−
+
zC(
−
ΦzE)−1 =
1
[1 ]
4
1
2
4
=
z(
z − )+ 1
1
− 1
z
2
z −
z + 1
2
z −
z + 1
8
2
8
8
3
1
z −
z +
=
2
4
2
z −
z + 1
2
z −
z + 1
8
8
3
1
z −
z +
−
z −
H (
z) =
C(
−
ΦzE1
1
2
1 25
2
4
Γ =
⋅
z −
z +
z −
z +
z −
z +
2
1
1
1
2
2
125
0
8
8
Siis leiame selle diskreetse süsteemi väljundi
Z-teisenduse
Y (
z) :
−
Y (
z) =
H (
z)
U (
z) +
C(
−
ΦzE) 1
zX (0)
2
3
2
1
z −
zz +
zC(
−
ΦzE
−
1
2
z −
1
5
1
2
4
zzX ( )
0 =
⋅
z −
z +
z −
z +
z −
z +
2
1
2
1
0
2
125
0
8
8
Zzu(
k) = ,
1
k ≥ 0 ⇔
U (
z) =
z − 1
2
z − ,
1 25
2
zz − 5
1
zz(2
z − ,
1 25)+
z(
z − )
1 (
z − 5
1 )
Y (
z) =
⋅
2
z −
z + 1
0 25
z −1
2
z −
z + 1
0 25
( 2
z −
z + 1,
0 25)(
z − )
1
2 2
z − ,
1 25
3
z +
z − 5
2
2
z + 5
1
3
zz − 5
0
2
z + ,
0 25
z8 3
z − 4 2
z + 2
z2
z −
z + 1
0 25)(
z − )
1
3
z − 2 2
z + 1
1 25
z − 1
0 25
8 3
z −16 2
z + 9
z −1
Jagades siis lugeja nimetajaga, esitame
Y (
z) kujul
∞
−1
−2
−
Y (
z) =
y +
y z+
y z + K +
ny z+ K =
iy z, kus
y(
k) =
y ∀
k ≥ 0
0
1
2
n∑ −
iki=0
41
k on
takti number ja järelikult on see täisarv.
8 3
z − 4 2
z + 2
zJagame siis
avaldise Y (
z) =
lugeja nimetajaga läbi.
8 3
z − 16 2
z + 9
z − 1
Tulpjagamine:
3
2
8 3
z −16 2
z + 9
z −
1
8
z − 4
z + 2
z−
3
1
−
17 −2
43 −
3
2
z −
z +
z −
1
3
+
z +
zz+K
8
16
9
1
2
8
16
12 2
z − 7
z +
1
−
2
27
3
12
z − 24
1
z +
−
−
z2
2
25
3
17
z −
+
1
−
z 2
2
−
153
1
−
17
17
z − 34 +
z−
8
8
43
141
1
−
17
−
z 2
8
8
K
Y (
z) = 1 + 3 −
17
43
1
z−2
z−3
z+ K ning
2
8
16
3
17
43
y(0) = ,
1
y )
1
= =
5
1
y(2) =
= 1
2 2 ,
5
y )
3
≈ ,
2 69
2
8
16
Väärtuse
y(0) kontrollimiseks ning
y(∞) leidmiseks kasutame piirväärtusteoreeme.
z −1
lim
x(
k) = lim
X (
z)
k →0+
z→∞
zPiirväärtusteoreemid diskreetaja süsteemide jaoks:
z −1
lim
x(
k ) = lim
X (
z)
k →∞
z1
→
zz − 1
8 3
z − 4 2
z + 2
zz − 1
8 3
z − 4 2
z + 2
z8 2
z − 4
z + 2
8
y(0) = lim
⋅
= lim
⋅
= =
z→∞
z8 3
z − 16 2
z + 9
z − 1
z→∞
z(8 2
z −8
z + )1(
z − ) lim
1
1
z→∞ 8 2
z − 8
z + 1
8
z − 1
8 3
z − 4 2
z + 2
z8 2
z − 4
z + 2
8 − 4 + 2
y(∞) = lim
⋅
=
z1
→
z(8 2
z −8
z + )1(
z − ) lim
6
1
z1
→ 8 2
z − 8
z + 1
8 − 8 + 1
Näidisülesanne N 9.2 Diskreetaja süsteemi kirjeldav diferentsiaalvõrrandite süsteem:
x (
k + )
2 =
x (
k) +
u(
k)
,
1
k ui k = 0
1
2
u(
k) =
x (
k + )
1 =
x (
k) − 2
u(
k)
2
1
0 ∀
k > 0
y(
k) =
x (
k)
2
x ( )
0 = 2
1
x )
1
= 1
1
x ( )
0 = 0
2
42
Leiame selle süsteemi olekumudeli, ülekandefunktsiooni ja väljundi väärtused
y(
k) ,
k = ,
0 K 5
,
Lahenduskäik Kuna
x (
k + )
2 =
x (
k) +
u(
k) on teist järku diferentsiaalvõrrand, peame kolmanda siseoleku
1
2
sisse viima.
Olgu
x (
k + )
1 =
x (
k + ,
1 siis
3
1
x (
k + )
1 =
x (
k)
1
3
x ( )
0 = 2
x (
k + )
1 =
x (
k) − 2
u(
k)
1
2
1
x ( )
0 = 0
2
x (
k + )
1 =
x (
k) +
u(
k)
3
2
x ( )
0 =
x1
= 1
y(
k) =
x (
k)
3
1
2
Seega, olekumudel
0 0 1
0
2
X (
k + )
1 = 1
0
0
X (
k) + − 2
U (
k)
X ( )
0 = 0
0 1 0
1
1
Y (
k) = [0 1 0]
X (
k)
Ülekandefunktsioon:
−
H (
z) =
C(
−
ΦzE) 1
Γ T
z0
− −1
1
2
zz1
2
z1
z
( −
ΦzE)−1
1
1
2
2
= −1
z0
1
zz
zz1
3
3
z −1
z −
1
0
−1
z
2
2
z1
z
1
zz
2
z1
z 0
0
C(
−
ΦzE)−
−
z +
1
1
Γ =
2
0 1 0]
2
1
zz1
− 2 =
[ 2
zz2
1
1 − 2 =
3
z −1
3
z −1
3
z −1
1
2
zz 1
1
− 2 2
z + 1
H (
z) =
3
z − 1
−
Väljundi leidmiseks kasutame valemit
Y (
z) =
H (
z)
U (
z) +
C(
−
ΦzE) 1
zX (0) :
2
C(
−
ΦzE2
−
z
z +
1
zzX ( )
0 =
[ 2
zz2
1 0 =
3
z −1
3
z −1
1
Zu(
k) = δ (
k) ⇔
U (
z) = 1
−
2
2
z +
2
1
2
z +
zz +
Y (
z) =
1 =
1
= −2
z+ −3
z+ −5
z+ K
3
z −
3
1
z −
3
1
z −
2
1
z −
z + 1
See tähendab, et
y(0) =
y )
1
( =
y(4) = ,
0
y(2) =
y )
3
=
y )
5
= 1
43
Näidisülesanne N 9.3 Leida impulsskaja viis esimest diskreeti
h1
h(2 ,
)
h3
h(4 ,
)
h )
5
neljal erineval meetodil,
kui diskreetne süsteem on antud oma olekumudeliga:
X (
k + )
1 =
ΦX (
k ) +
ΓU (
k )
Y (
k ) =
CX (
k ) +
DU (
k )
kus on teada maatriksid:
4
2
1
Φ =
,
Γ = ,
C = [2
]1,
D = 0
− 5
3
− 4
−
1
0
,
1
k = 0
algolek
X (0) = ja sisendsignaal
u(
k) =
0
,
0
k ≠ 0
Lahenduskäik Meetod A (iteratsiooni meetod, kasutades olekumudelit)
X (
k + )
1 =
ΦX (
k) +
ΓU (
k)
h(
k) =
CX (
k)
Kuna tegemist on impulsskajaga, siis väljundsignaali tähistasime mitte üldkujul
Y (
k ,
) vaid
h(
k .
) Kuna
D = ,
0 siis olekumudeli teine võrrand lihtsustus.
k = ;
0
x )
1
=
ΦX (0) +
ΓU (0) =
4
2 0
1
1
0
+ 1 = ;
h( )
0 =
CX ( )
0 = [2
]1 = 0
− 5
3
− 4 0 −
1
−
1
0
k = ;
1
x( )
2 =
ΦX )
1
( +
ΓU )
1
( =
4
2 1
1
2
1
+ 0 =
h )
1
=
CX )
1
= [2
]1 = 1
− 5
3
− 4 −
1
−
1
5
0
−
1
k = ;
2
x )
3
=
ΦX (2) +
ΓU (2) =
4
2 2
1
9
2
+ 0 =
h( )
2 =
CX ( )
2 = [2
]1 = 4,5
− 5
3
− 4 5
0
−
1
− 9
5
0
k = ;
3
x(4) =
ΦX3
+
ΓU )
3
=
4
2 9
1
18
9
+ 0 =
h )
3
=
CX )
3
= [2
]1 = 9
− 5
3
− 4 − 9 −
1
5
4
− 9
k = ;
4
x )
5
=
ΦX (4) +
ΓU (4) =
4
2 18
1
81
18
+ 0 =
h( )
4 =
CX ( )
4 = [2
]1 = 40,5
− 5
3
− 4 5
4
−
1
− 8
1
5
4
81
k = 5
h )
5
=
CX )
5
= [2
]1 = 81
− 8
1
Meetodite B ja C ühine algus (diskreetse ülekandefunktsiooni leidmine)
−
H (
z) =
C [
−
ΦzE] 1
Γ
z −
−
det[
−
ΦzE4
2
= det
= (
z − 4)(
z + 4)+ 7
2
=
z − 9 = (
z − 3)(
z + 3)
5
3
z + 4
44
1
1
z
4
2
−
ΦzE]−
+
= (
z − 3)(
z + 3)
− 3,5 z − 4
−
+
z +
H (
z)
=
C[ −
ΦzE] 1
Γ = [2 ] 1 z 4
2
1
5
4
1
= ... =
det − 3,5
z − 4 −1
(
z −3)(
z + 3)
Meetod B1 (korrutades
Z-ga ja kasutades
Z-teisendust)
ZZzKuna
H (
z) ⇔
h(
k) ja
Z-teisenduse tabelis on olemas selline rida
k⇔
a , siis tuleks üle-
z −
akandefunktsioon jagada osamurdudeks (näiteks resiidide kaudu) nii, et lugejas oleks
Z:
z +
5
4
1 25
0 25
H (
z) = (
−
z − 3)(
z + 3)
z − 3
z + 3
Korrutame võrrandi mõlemad pooled
Z-ga. Hiljem (et midagi ei muutuks) tuleks teha jaga-
mine
Z-ga. Sellele aga vastab aja vallas nihutamine ühe takti võrra “tagasi”.
zzzH (
z) = ,
1 25
− ,
0 25
z − 3
z + 3
h(
k ,
) mis
vastaks Z-teisenduse
kaudu
zH (
z) - le, on ,
1 25 × 3
k − ,
0 2 (
5 − 3)
k ; kui teeme
nihutamise ühe takti võrra “tagasi”, siis saame, et
h(
k ,
) mis vastab
Z-teisenduse kaudu
H (
z) - le, on ,
1 25× 3
k 1
−
k −
− ,
0 2 (
5 − 3) 1.
Arvutame meid huvitavaid impulsskaja diskreete saadud valemi kaudu:
h(
k) = ,
1 25× 3
k 1
−
k −
− ,
0 2 (
5 − 3) 1, kui
k > 0
k = 1
h )
1
= ,
1 25 × 30 − ,
0 2 (
5 − 3)0 = ,
1 25 − ,
0 25 = 1
k = 2
h(2) = ,
1 25 × 31 − ,
0 2 (
5 − 3)1 =
1
3 25 + ,
0 2 )
5 =
5
4
k = 3
h )
3
= ,
1 25 × 32 − ,
0 2 (
5 − 3)2 = 9 ,
1
( 25 − ,
0 2 )
5 = 9
k = 4
h(4) = ,
1 25 × 33 − ,
0 2 (
5 − 3)3 = 27 ,
1
( 25 + ,
0 2 )
5 = 40 5
,
k = 5
h )
5
= ,
1 25 × 34 − ,
0 2 (
5 − 3)4 = 81 ,
1
( 25 − ,
0 2 )
5 = 81
Meetod B2 (jagades
Z-ga ja kasutades
Z-teisendust)
Selleks et rakendada
Z-teisendust, saab kasutada ka teist moodust – jagada ülekandefunkt-
siooni avaldise mõlemad pooled
Z-ga läbi, tükeldada saadud avaldis osamurdudeks ja
avaldada siis sellest avaldisest
H (
z) :
1
5
2
5
1
−
z +
5
4
H (
z)
z +
5
4
H (
z) =
2
6
18
z − 3)(
z + 3)
zz(
z − )
3 (
z + )
3
zz − 3
z + 3
1
5
2
5
1
−
1
1 25
z0 25
2
6
18
zH (
z) =
z+
z+
z= − +
) +
)
zz − 3
z + 3
2
3
z − 3
3
z + 3
Rakendame saadud avaldisele
Z-teisendust ja saame
1 25
0 25
kh(
k) =
3 +
(−3)
k 3
3
45
Märkus: Z-teisenduse
kasutamisel kadus esimene liige ära
δ funktsiooni omaduste tõttu:
1
kui
k = 0
δ (
k) =
0
kui
k ≠ 0
On kerge näidata, et saadud valem on
h(
k) arvutamiseks kergesti teisendatav kujule, mis
saadi meetodiga
B1. Seega on ka tulemused samad, mis meetodil
B1.
h )
1
( = 1
h(2) = 4,5
h )
3
= 9
h(4) = 40,5
h )
5
= 81
Meetod C (arendades diskreetse ülekandefunktsiooni Lorani
ritta )
Meetod rajaneb valemil
∞
−1
−2
−
H (
z) =
h )
1
(
z+
h(2)
z + K +
h(
n)
nz+ K = ∑
−
h(
i)
iz i=0
Sellisele kujule saame ülekandefunktsiooni teisendada, jagades lugeja nimetajaga (nn
tulp -
jagamine):
z +
5
4
2
z −
9
−
−
−
−
−
−
z +
0 − 9 1
z1 1
z+ 4,5 2
z+ 9 3
z+ 40,5 4
z+ 81 5
z K
_ 5
4 + 9 1
−
z 5
4 + 0 1
−
z− 40 5
−2
z _
9 1
−
z+ 40 5
−2
z 9
1
−
z + 0
−2
z− 81 −3
z _
40 5
−2
z+ 81 −3
z 4
0 5
−2
z + 0
−3
z− 364 5
−4
z _ 81 −3
z+ 364 5
−4
z 8
1 −3
z + 0
−4
z− 729 −5
z L
Nagu näha, annavad kõik neli meetodit samu tulemusi:
h )
1
( = 1
h(2) = 4,5
h )
3
= 9
h(4) = 40,5
h )
5
= 81
46
Ülesanded iseseisvaks lahendamiseks IL 9.1 On antud diskreetaja süsteemi ülekandefunktsioon
z − 5
0
H (
z) = (
z −
1
0 (
z − 3
0 )(3 2
z + 2
z + )
1
Leida selle süsteemi hüppekaja
g(
k) väärtused punktides
k =
3
2
1
0
∞
IL 9.2 On antud diskreetaja süsteemi olekumudel
1
0 2
1
x(0) =
x(
k + )
1 =
x(
k) +
u(
k)
0
1 3
1
y(
k) = [1
]1
x(
k)
u(
k) = ,
1
k ≥ 0
Leida
y(
k),
k = 0, 1, 2, 3; ülekandefunktsioon
H(
z); hüppekaja punktides
g(0),
g(1),
g(2),
g(3),
g(4).
IL 9.3 On antud ühe sisendiga ja ühe väljundiga diskreetaja süsteemi kirjeldav diferentsiaalvõrrand
x(
k + )
3 = 2
u(
k) − 5
0
x(
k + )
2
y(
k) =
x(
k)
Leida selle süsteemi olekumudel, ülekandefunktsioon ja hüppekaja väärtused taktidel
k =
3
,
2
,
1
,
0
∞
IL 9.4 Leida impulsskaja viis esimest diskreeti
h1
h(2 ,
)
h3
h(4 ,
)
h )
5
neljal erineval meetodil,
kui diskreetne süsteem on antud oma olekumudeliga:
X (
k + )
1 =
ΦX (
k ) +
ΓU (
k )
2
− 2
− 2
kus
Φ =
,
Γ =
,
C =
[1 2]
Y (
k ) =
CX (
k )
5
1
− 2
1
0
x =
0
tingimusel, et
,
1 kui
k = 0
u(
k) =
,
0 kui
k ≠ 0
IL 9.5 Leida impulsskaja viis esimest diskreeti
h1
h(2 ,
)
h3
h(4 ,
)
h )
5
neljal erineval meetodil,
kui diskreetne süsteem on antud oma olekumudeliga:
X (
k + )
1 =
ΦX (
k ) +
ΓU (
k )
3
− 3
−1
kus
Φ =
,
Γ =
,
C =
[2 4]
Y (
k ) =
CX (
k )
− 2 − 2
2
47
0
x =
0
tingimusel, et
,
1 kui
k = 0
u(
k) =
,
0 kui
k ≠ 0
IL 9.6 Leida impulsskaja viis esimest diskreeti
h1
h(2 ,
)
h3
h(4 ,
)
h )
5
neljal erineval meetodil,
kui diskreetne süsteem on antud oma olekumudeliga:
X (
k + )
1 =
ΦX (
k ) +
ΓU (
k )
1
− 3
2
kus
Φ =
,
Γ =
,
C =
[−1 ]1
Y (
k ) =
CX (
k )
−1 −1
− 3
0
x =
0
tingimusel, et
,
1 kui
k = 0
u(
k) =
,
0 kui
k ≠ 0
48
10. SÜSTEEMIDE STABIILSUS, JUHITAVUS JA JÄLGITAVUS
Selle peatüki teoreetilisi aluseid saab leida H. Sillamaa õpikust ptk. 5.1, 5.3 ja 5.4.
Süsteemi stabiilsus näitab, kas süsteemi siseolekud, kui sisend puudub (või on võrdne nulliga)
ja süsteemi algolek erineb tasakaaluolekust, lähevad teatud tasakaaluolekusse või mitte.
Juhitavus näitab, kas süsteemi saab viia etteantud olekusse suvalisest algolekust lõpliku aja
jooksul. See omadus on väga oluline olekuregulaatori sünteesil (vt. peatükk 11).
Jälgitavus näitab, kas on võimalik määrata kõikide süsteemi olekute väärtused lõpliku aja
jooksul, kui on teada ainult sisendi ja väljundi väärtused. See omadus on väga oluline
olekutaastaja sünteesil (vt. peatükk 12).
Näidisülesanne N 10.1 On teada süsteemi diskreetaja olekumudel
1
1
1
X (
k + )
1 = 1
X (
k) +
−
U (
k)
0
1
4
Y(
k) = [1 0]
X (
k)
Määrame selle süsteemi juhitavust, jälgitavust ja stabiilsust.
Lahenduskäik Juhitavuse määramiseks peame leidma juhitavuse maatriksi.
Juhitavuse maatriks
Q2
1
−
K
, kus
n on süsteemi järk.
c[
Γ ΦΓ Φ ΓΦ n Γ ]
Kuna antud juhul on tegemist teist järku süsteemiga (
n = 2 ), siis
1
2
Q =
c[
Γ ΦΓ]=
1
1 −
4
Kui juhitavuse maatriksi
astak on võrdne süsteemi järguga
rank (
Q ) =
n, siis süsteem on täie-
clikult juhitav.
Kui juhitavuse maatriksi astak on süsteemi järgust väiksem
rank(
Q )

































































































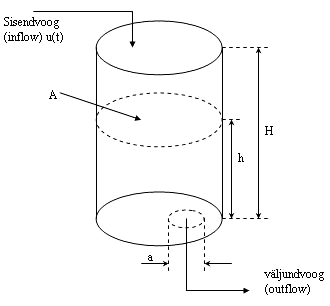




Kõik kommentaarid