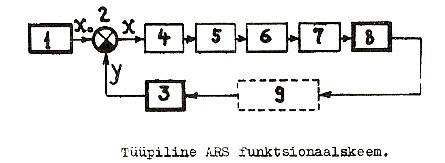
spetsiaalsetest anduritest, nt. alalisvoolu signaal vahemikus 4÷20 mA või 0÷5 mA. Oluline pole mitte andur, vaid anduri väljundsignaali suurus. Andurid peavad töötama koos täiturmehhanismidega, mis on väga erinevad. Tänapäeval on põhiliselt elektrilised, vahelduvpinge asünkroonmootorid, mis pannakse tööle impulssreziimis. 12 13 Reguleerimisteooria alused 10. Lineaarsed ja mittelineaarsed ARS. Tüüpilised mittelineaarsed karakteristikud. ARS uurimise ülesanded ja meetodid. Protsessid dünaamilistes süsteemides. Staatika ja dünaamika karakteristikute ja võrrandite mõisted. Igas reguleerimissüsteemi lülis kulgeb signaal elemendi sisendist väljundile. Kuna elemendi sisend- ja väljundsignaali kandjateks võivad olla mitmesugused füüsikalised suurused, siis ei tarvitse sisend- ja väljundsignaalide mõõtühikud
parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaatset käivitust, reverseerimist ja peatamist. Võimaldavad hoida mingit parameetrit kindlal tasemel või muuta seda teatud programmi järgi, hoida parameetreid min. või maks. tasemel ja muuta ühte parameetrit nii, et ta jälgiks teist parameetrit, mis võiks muutuda juhuslikult. Automaatjuhtimissüsteemi klassifikatsioon.
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e.
Elektroonika Loengute materjalid: skeemid, diagrammid, teesid. 1 Sisukord 1. Elektroonika ajaloost (arengu etapid, elektroonika osad, elektronlambid, elektronkiiretoru, elektronseadmete montaazi tüübid)............................................................................................... 3 2. Elektroonika passiivsed komponendid.......................................................................................... 14 3. Pooljuhtseadised (dioodid, bipolaartransistorid, väljatransistorid, türistorid)............................... 23 4. Optoelektroonika elemendid, infoesitusseadmed.......................................................................... 42 5. Analoogelektroonika lülitused....................................................................................................... 60 5.1. Elektrisignaali võimend
vahendi konspektiivne iseloom. Seega on õpilastel vajalik aktiivselt osaleda tundides ja soovitavalt ka konspekteerida õppejõu täiendavaid selgitusi. Ja loomulikult ei sisalda õppevahend sellist materjali või on see esitatud väga napilt, mida on võimalik leida teistest kättesaadavatest allikatest, millistele on õppevahendi tekstis vihjatud ja mis on ära toodud kirjanduse loetelus või mida on põhjalikult käsitletud teistes õppeainetes nagu näiteks automaatika alused, digitaaltehnika, elektrimasinad, elektri- ajamid jne. Kuna käesolev õppevahend on autori teada esimene selleteemaline kutsekeskharidus- koolidele koostatud üllitis, ei ole välistatud selles ka ebatäpsused ning vead ja autor on juba ette tänulik kõikide märkuste ja täpsustuste eest. Rein Kask Jaanuar 2007.a. Sisukord Sissejuhatus ................................................................................ 6 S1. Põhimõisteid ..........
TTÜ elektriajamite ja jõuelektroonika instituut, 1995 Kopli 82, 10412 Tallinn Tel 620 3704, 620 3700. Faks 620 3701 ISBN 9985-69-006-0 TTÜ trükikoda. Koskla 2/9, Tallinn EE0109 Tel 552 106 3 Sisukord Saateks 5 Digitaal- ja mikroprotsessortehnika arengut kajastavaid aastaarve 6 1. DIGITAALELEKTROONIKA ALUSED 7 1.1. Diskreetsed ja arvsignaalid 7 1.1.1. Kvantimine 7 1.1.2. Kodeerimine, dekodeerimine ja koodide liigid 8 1.1.3 Kümnendarvude teisendamine kahend-, kaheksand- ja kuueteistkümnendarvudeks 12 1.1.4. Informatsiooni hulk ja signaali viga 13 1
3 ELEKTRIAJAMITE ELEKTROONSED SÜSTEEMID 4 Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene Toimetanud Evi-Õie Pless Kaane kujundanud Ann Gornischeff Käesoleva raamatu koostamist ja kirjastamist on toetanud SA Innove Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Ehitajate tee 5, Tallinn 19086 Telefon 620 3700 Faks 620 3701 http://www.ene.ttu.ee/elektriajamid/ Autoriõigus: Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene TTÜ elektriajamite ja jõuelektroonika instituut, 2008 ISBN ............................ Kirjastaja: TTÜ elektriajamite ja jõuelektroonika instituut 3 Sisukord Tähised............................................................................................................................5 Sümbolid .....................





























Kõik kommentaarid