TALLINNA
TEHNIKAÜLIKOOL
Matemaatika-loodusteaduskond
Meresüsteemide
Instituut
Erik
Illaste
YAEB-12
KAUGSEIRE RAKENDUSED OOKEANIDE
JA MEREDE UURINGUTESReferaat
Õppeaine:
Üldine okeanograafia ja
limnoloogia Õppejõud:
Prof . Urmas
Lips Tallinn
2015
SISUKORD
Sissejuhatus.........................................................................................................................2
1. Kaugseire
mõiste............................................................................................................2
1.1.
Passiivsed
seadmed ............................................................................................3
1.2.
Aktiivsed
seadmed...............................................................................................3
1.3
Kaugseire andmeid mõjutavad
tegurid.................................................................4
2.
Uurimisobjektid...............................................................................................................4
2.1. Klorofülli, heljumi
ja kollase aine
kaugseire........................................................4
2.2.
Pinnakihi
temperatuuri
määramine.....................................................................5
2.3.
Järvede
seire .......................................................................................................6
3.
Vahendid ja
meetodid.....................................................................................................6
3.1.
GPS - Üleilmse asukohamääramise
süsteem.....................................................7
3.2.
Satelliidid .............................................................................................................7
3.3.
Detektorid............................................................................................................8
3.4.
Radar ja
LIDAR ..................................................................................................10
3.5.
Andmete töötlus ja mudeliteks
integreerimine ....................................................11
Kasutatud
kirjandus...........................................................................................................12
SissejuhatusMaa pinnast katab
vesi 74%, millest omakorda 94% on
ookeanides . Vee hulk, selle
ringlus ja kvaliteet on inimestele elutähtsad nii
tarbevee seisukohalt kui
ka
kaudsemalt elukeskonda ja ilma puudutavate faktorite näol.
Veeringega seotud nähtuste paremaks tundmiseks on
paljudele jõgedele
paigaldatud veetaseme ja voolukiiruse mõõtjad; imajaamad koguvad
andmeid vihma ja lume kohta, tervisekaitse- ja keskkonnateenistused
analüüsivad veeproove.
Sealjuures pole alati võimalik koguda
piisavalt andmeid, et oleks reaalne statistiliselt usaldusväärsete
tulemuste saamine tähtsate hüdroloogiliste näitajate kohta, nagu
veekogude pindala, lume
veesisaldus , jääväljade pindala, jää
veesisaldus, pilvisus, sademed ja veeaur. Seetõttu on hakatud aina
enam välja töötama ja praktikas
rakendama vee kaugseire
meetodeid .
Füüsikalis-bioloogiliste teaduste edendajad on aastakümneid
seisnud silmitsi informatsiooni hankimise ja töötlemisega seotud
väljakutsetega, ning on identifitseerinud ja utiliseerinud
satelliit -kaugseire sensortehnoloogiaid tähtsate ja järjepidevate
informatsiooni ammutamise allikatena atmosfääri, ookeanide ja
maapinna uurimiseks erinevates ruumilis-ajalistes mastaapides.
Mitmeid teadusharusid hõlmav kaalukas hulk teaduslikku kirjandust
dokumenteerib kaugseire andmete analüüsi tehnikaid ja nende
praktilisust ning potentsiaali identifitseerimaks globaalseid muutusi
puudutavaid keskkondlikke atribuute ja füüsilis-bioloogiliste
protsesside monitooringut. Kiirelt arenev kaugseire metoodika on
tõestanud end väärtusliku vahendina meid ümbritseva maailma
mõistmisel ja pakub lahendusi mitmetes valdkondades [1]. Käesoleva
referaadi eesmärk on tutvustada kaugseire mõistet, erinevaid
kaugseire meetodeid ning nende rakendusi eelkõige ookeanide, merede
ja järvede uuringutes.
1.
Kaugseire mõisteKaugseire
näol on tegu informatsiooni kogumise ja interpreteerimisega
elektromagnetilise kiirguse abil [2],
sealjuures
pole mõõteaparatuurid uuritava objektiga füüsilises
kontaktis .
Lennukitelt ja satelliitidelt teostatud mõõtmised võimaldavad
koguda andmeid ohtlikest ja halvasti ligipääsetevatest
kohtadest .
Satelliitide, lennukite, poide, laevade ja helikopterite abil
koondatakse andmeid ja tehakse pilte, mille abi saab analüüsida
parajasti erinevaid kaugseiret rakendava teadusharu huviorbiidis
olevaid parameetreid. Orbiidil olevad platvormid koguvad ja edastavad
andmeid elektromagnetkiirguse spektri eri osadest, mis võimaldab
teadlastel uurida suuremõõtmelisi süsteeme. Kujutise
ruumilise lahutusvõime ja tundlikkuse suurendamiseks on kasutusele
võetud digitaalse salvestusega skaneerivad seadmed, mis jaotuvad
passiivseteks ja
aktiivseteks sensoriteks.
Merepinna mõõtmiseks
sobivad skaneerivad raadiomeetrid said kosmoses kasutamiseks
tehniliselt kõlbulikuks alles 1972. aastal, mil neid rakendati
esmakordselt satelliidi
LANDSAT pardal. Kogutud
infot saab kasutada
kaartide koostamiseks, andmete analüüsiks või
pikaajaliste
kui ka operatiivsete
prognooside
teostamiseks.
1.1
Passiivsed seadmedPassiivsete
meetodite tööks vajaliku kiirguse näol on tegu maapinnalt,
atmosfäärist või ookeanist tagasi peegeldunud päikesevalgusega.
Passiivsed
andurid on kasutusel näiteks fotograafias,
laengsidestusseadistes ja radiomeetrites ning
infrapunakiirguse mõõtevahendites. Kuna
värvuse järgi on võimalik eristada erinevaid aineid ja materjale,
tuleb kasuks registreerida võimalikult paljude erinevate
spektrivahemike sensorini jõudnud signaali
tugevust. Spektrivahemike arvu järgi eristatakse monokromaatilisi,
multispektraalseid ja hüperspektraalseid
sensoreid . Kanalite arvu
kasvuga kahaneb aga ka paraku ühte
kanalisse jõudev
kiirgusenergia ,
mille kompenseerimiseks tuleb suurendada
piksli mõõtmeid ehk
vähendada resolutsiooni. Näiteks ühe kõrgeima lahutusvõimega
satelliidil IKONOS monokromaatilise režiimi suurus on 1 m,
multispektraalses režiimis aga 4 m. Päikeselt
pärineva ja maalt peegeldatud kiirguse kõrval mõõdetakse ka Maa
süsteemist pärinevat pikalainelist kiirgust. Maalt
emiteeritud soojuskiirguse mõõtmisel on määravaks Plancki seadus
absoluutse musta keha kiirgusvõimsuse kohta ja Wieni nihke seadus,
mille kohaselt on kõrgema temperatuuri korral kiirgusvõimsus suurem
ja kiirgus-spektri tipu lainepikkus lühem. Päikesekiirguse spektri
tipp on kõrge temperatuuri tõttu lainepikkusel 0.5 μm,
ent Maa poolt emiteeruv
infrapuna kiirgus tipneb
10 μm juures [3].
1.2 Aktiivsed seadmedAktiivsete seadmete
korral kiirgavad seadeldised ise kiirgust ning võtavad selle ka
vastu.
Võib luua analooge
radariga: kosmoses asuv seade paiskab välja mikrolainete voo ning
registreerib tagasipeegeldunud signaali,
kusjuures on võimalik
varieerida kiiratavate impulsside arvu, kestust, polarisatsiooni,
kiire laiust, sagedust, ning langemisnurka. Lainepikkusi on võimalik
valida nõnda, et need muudavad segavad faktorid nagu pilved ja udu
läbipaistvateks. Aktiivsed kaugseire meetodid on näiteks Radar ja
LIDAR, mis võimaldavad tänu kiirgamise ja kiirguse tagasi jõudmise
vahelise ajahulga arvestamisele hankida teavet objekti asukoha,
kõrguse, kiiruse ja suuna kohta.
Veepinna kõrgust mõõdab
altimeetria ning sagedust skatteromeetria. Huviorbiidis on veetaseme
kõrguste hälbed tasakaaluasendist, mis võimadavad pinnahoovuste,
Rossby lainete, sünoptiliste keeriste ja teiste dünaamiliste
nähtuste määramist, kuna veetaseme ja selle poolt tekitatud rõhu
gradient ning voolukiirus on geostroofilises seoses [4].
Skatteromeetria tuumikpõhimõtte kohaselt peegeldub radari signaal
kareda vee või jää pinna tõttu tagasi intensiivsemalt. See meetod
aitab määrata lisaks meretuule kiirusele, jääkattele ja
lainetusele ka
naftareostuse piirkonda, mille kohal on
lainetus maha
surutud.
1.3 Kaugseire andmeid mõjutavad
teguridKaugseire andmeid
mõjutavad välised tegurid.
Optilist signaali mõjutavad eeskätt
okeanograafilistes mõõtmistes atmosfääris hajunud kiirgus; müra,
ehk veepinnalt peegelduv, häiriv päikesekiirgus; veest tagasituleva
kiirguse transformeerumine,
neeldumine ja
hajumine atmosfääris.
Veest tagasitulevat signaali mõjutab otsese ja hajunud kiirguse
edasine hajumine vee molekulides kui ka vees lahustunud ning
hõljuvates ainetes.
2. UurimisobjektidKaugseirele leiab
ookeanide ja rannikumerede
uurimises laialdasi rakendusi. Teostatakse
veekogude
seisundit määravaid ja rannajoonte muutusi puudutavaid
monitooringuid, jälgitakse setete transporti, kaardistatakse
ranniku tunnuseid, hoidmaks piirkonniti ära erosiooni ohtu.
Mõõdetakse vee temperatuuri, lainete kõrgust, jäätumise taset ja
jää liikumist. Globaalsel tasandil vaadeldakse ka ookeanide
tsirkulatsiooni ning
hoovuste süsteemi. Saadud andmeid kasutatakse
ookeanide ning merede paremaks mõistmiseks kui ka mereliste
maavarade paremaks majandamiseks.
Rannikumere
kaugsire on Eestis riikliku seireprogrammi osa alates 2005. aastast
[5]. Selle põhieesmärk on välja töötada meetodeid vee omaduste
hindamiseks. Selle hulka kuuluvad fütoplanktoni, hõljumi ja kollase
aine hulga määramine ning vee läbipaistvuse hindamine Läänemeres
ja järvedes. Kaugseiret rakendatakse põhjataimestiku katvuse ja
selle liigilise koosseisu kaardistamiseks madalates rannavetes,
potentsiaalselt toksiliste tsüanobakterite õitsengute tuvastamiseks
ja seiramiseks. Rannikumere seire tulemuste põhjal analüüsitakse
lühi- ja pikaajalisi muutusi rannikumeres.
2.1. Klorofülli, heljumi ja
kollase aine kaugseireLäänemeres on
aastakümneid olnud probleemiks eutrofeerumine ehk
toitainetega rikastumine ja vetikate liigvohamine. Veepinnalt tagasipeegeldunud
elektromagnetkiirguse värvus on aga tihedalt seotud vetikate
klorofülli sisaldusega. Hüperspektraalse sensori HYPERION
mõõteandmete põhjal ilmneb tõsiasi, et sinivetikate vohamise ajal
varieerub klorofülli
konsentratsioon sensorite 1 x 1 km piksli sees
märgatavalt. Laevadele lähedal paiknev
pinnavesi on läbi segatud
ning veeproovidesse sattuv vetikate konsentratsioon on laevateedest
eemal olevatest vetest oluliselt madalam. Kaugseire spektraalsete
kanalite andmetest oleks tarvilik luua bio-
optilised mudelid, mis
aitaksid paremini määrata klorofülli, primaarproduktsiooni,
heljumi ja hõljuva
orgaanika sisaldust. Kuna Läänemeri on elustiku
ja sissevoolu
kohapealt üsna
unikaalne , pole tihtipeale võimalik
kasutada teiste piirkondade algoritme ning sageli tuleb luua
lokaalseid kaugseire rakendusi. Näiteks on ühes ja samas ajahetkes
ning Läänemere piirkonnas aset leidnud sinivetikate vohamise
mõõtmistel, milleks rakendati erinevaid satelliitsensoreid
(Hyperion, SeaWiFS, Modis/Aqua ja MERIS) ilmnenud mõõtmistulemustes
olulisi erinevusi.
Lisaks
klorofüllile mõjutab veepinnalt tagasipeegelduva valguskiirguse
värvi ka näiteks merepõhjast üles tõstetud hõljuv
sete ehk
heljum , mis on
eristatav pruunide värvitoonidena. Sensorit MODIS on
näiteks siinsete sadamate süvendustööde käigus rakendatud
heljumi leviku määramiseks. Heljumi levik paotab valgust süvendustöödega kaasnevate keskkonnamõjude ulatusele, ent paiguti
võib lainetuse tekitatud heljum olla süvendustööde omast
domineerivam. Lisaks
eelmainitutele on oluliseks merevee karakteristikuks, eriti
süsinikuringe seisukohalt, ka jõgede poolt sissekantav nn kollane
aine ehk huumusaineid sisaldav lahustunud orgaaniline aine, mis
põhjustab võrreldes Põhjamerega Läänemeres jõevete osakaalu
suuruse tõttu kõrgemaid fooniväärtusi. Põhjataimestik
on veekeskkonna ökoloogilise seisundi indikaator ning muutused
põhjakoosluste ruumilises levikus ning liigilises koosseisus aitavad
hinnata rannikumere keskkonna seisundit. Senini on põhjataimestikku
Läänemeres kaardistatud sukeldumismeetodil, mis on aga suhteliselt
kallis, aeganõudev ning uuritava ala suurus on väga väike
võrreldes Eesti rannikuvete kogupindalaga. Kaugseiremeetod
võimaldaks kaardistada laialdasemaid alasid võrreldes
sukeldumismeetodiga. Suure
põhjataimestiku varieeruvuse tõttu on Eesti
rannikumere põhjatüüpide kaardistamisel eelistatumad suure
ruumilise lahutusvõimega
sensorid . Kuna selliste satelliitide
spektraalne lahutus ei ole mitmete oluliste põhjatüüpide
eristamiseks piisav, siis võib järeldada, et optimaalseim riist
põhjataimestiku ulatuse ja tüübi ning vee sügavuse
kaardistamiseks Eesti rannavetes on lennuvahendil paiknev suure
ruumilise ja spektraalse lahutusvõimega spektromeeter [6].
2.2. Pinnakihi temperatuuri
määramineÜsna
tõhusalt määratakse
kaugseire
abil ka
vee pinnakihi temperatuuri. Seda uuritakse infrapunases piirkonnas
mõõdetud signaali järgi. Siinjuures mõjutab tulemust oluliselt
atmosfääris sisalduv veeaur. Et veeauru mõju vähendada,
arvutatakse temperatuur vee
pinnakihis kahe spektrikanali suhtena.
Saadud tulemusi saab edukalt rakendada mereuuringutes, näiteks
selgitades hoovuste liikumist, aga ka kalade arengut
ja toitumistingimusi määratledes.
Samuti annab vee pinnakihi temperatuur teavet nii merel oleva ilma
kui ka atmosfääri dünaamika ning ilmastiku kohta laiemalt.
Ookeanides
ulatub temperatuuri märgatavate
muutustega kiht mitmesaja meetri
sügavusele. Veesamba soojushulga muutused sõltuvad muu hugas El
Nino, Atlandi termohaiinse ümberpöörava tsirkuatsiooni ning teiste
nähtuste faasist ja tugevusest, mille tagajärjeks on muutused El
Nino lõunaostsillatsiooni, Põhja-
Atandi ostsillatsiooni ja teistes
klimaatilistes indeksites. Veepinna temperatuuri kaugseire andmeid
selliste hinnangute tegemiseks kasutatakse, kuid suure ettevaatusega,
sest ülakihi temperatuur ei tarvitse olla heas korrelatiivses seoses
kogu veesamba
omaga . Ookeanide soojenemise tõestamiseks kasutatakse
eelkõige XBT-sondide andmeid, mis mõõdavad temperatuuri vähemalt
0.7 km sügavuseni. AVHRR ja MetOp sensorite digitaalkaartideks
töödeldud andmeid analüüsides selgus 1990-2008 aastal läbiviidud
uuringus, et Läänemere veepinna temperatuur tõuseb.
2.3. Järvede seireMeie
arvukad siseveekogud, nagu näiteks järved, mida on umbes
1450 ,
vajavad jälgimist ja hoolt. Euroopa
Liidu veepoliitika raamdirektiiv [7]
sätestab vajaduse jälgida veekogusid, mis on suuremad kui 0.5 km
ning teha kindlaks nende ökoloogiline seisund olenevalt
tüübi-spetsiifilistest algtingimustest. Seisundi hindamisel
lähtutakse peamiselt bioloogilistest kvaliteedinäitajatest.
Suuremate järvede puhul on kasutatav
satelliitkaugseire, aga väiksemate järvede puhul peab kasutama
lennuvahendil paiknevaid kaugseire sensoreid. Vetikaõitsengute
seiret
suuremates järvedes on
võimalik teostada operatiivselt. Samas näiteks kalda- ja
põhjataimestikuga kaetud alade muutuste jälgimiseks
piisab kord
aastas kogutavast informatsioonist. Teatud maismaa
uurimiseks konstrueeritud satelliitide rakendamisel oleks
võimalik järvede puhul jälgida ka teatud
parameetrite pikaajalisi muutusi, näiteks
roostike levikut, fütoplanktoni
hulka, ning rannajoonte
muutusi.
3. Vahendid ja meetodidPlatvorm
on alus või kandur, millele seireaparatuur on monteeritud. Põhilised
platvormid ülalt alla seiramiseks on lennuk ja satelliit. Lisaks
sellele kasutatakse vähesel määral torne, õhupalle,
mudellennukeid ja tuulelohesid. Juhitav liikumine on oluline eelis
platvormi valikul enamiku kaugseireülesannete puhul. Kuna kõrgemalt
vaadates on korraga nähtav ala suurem ja detailsus vastavalt
väiksem, siis sõltub platvormi valik suuresti sellest, mida ja kui
detailselt seirata. Lennuki ja helikopter pealt toimuvat kaugseiret
iseloomustab võimalus kanda mõnekümmend kilo kuni mitu tonni
kaaluvat aparatuuri, lennata madalal kui ka mitmekümne kilomeetri
kõrgusel, varieerida lennukiirust nullist kuni mitmesaja meetrini
sekundis ning
paindlikkus lennumarsruudi ja lennuaja valimisel.
Siiski on atmoosfäärilennul tehtava kaugseire puhul ka omad
puudused. Lennu kestus on lühike, mistõttu on raske saada pidevat
pikaajalist vaatlusriba. Võrreldes kosmoseseirega on geograafiline
ulatus väiksem. Atmosfääri liikumise tõttu on keeruline määrata
täpset asukohta ja asendit.
3.1.
GPS - Üleilmse asukohamääramise süsteemSensori täpse
asukoha saab määrata kasutades globaalset positsioneerimissüsteemi
(Gobal
Positioning System, GPS) või kontrollpunkte maapinnal, sageli
omavahel kombineerituna. Kontrollpunktid võivad olla kas hästi
identifitseerivad objektid maapinnal või spetsiaalselt maastikule
paigutatud esemed. Atmosfääri turbulentsist tingitud lennuki
kõikumine kõigis kolmes tasapinnas põhjustavab moonutusi pildi
kujus võrreldes ideaalse horisontaallennuga. Kaasaegseis
seiresüsteemides detekteeritakse neid kõrvalekaldeid ja vähemalt
osaliselt korrigeeritakse arvutuslikult.
GPSi
ehk Ülemaailmset Asukohamääramise Süsteem arenes välja
raadiolokatsioonist. Tegu on universaalse, kõikjal kättesaadava ent
keeruka tehnoloogiaga. GPSi komponendid on kosmosesegment (mille alla
kuulub 24 satelliiti), kontrollsegment (jälgimisjaam, peamine
kontrollkeskus, maapeased
antennid ) ning kasutajasegmendi osad.
Kosmosesegment asub
maapinnast 20 000 km kõrgusel ning selle
tiirlemisperiood on 12 tundi. Pardal on ülitäpsed aatomkellad ning
nii
militaar - kui üldakasutatavad saatjad. Kontrollsegment
koosneb püsikontrolljaamast, alternatiivsest püsikontrolljaamast ja
erinevatesse
kohtadesse paigaldatud antennidest ning
ekraanijaamadest. Erinevatesse maailma otstesse paigaldatud antennid
sünkroniseerivad üksteise aatomkellasid nanosekundi täpsuseni.
Selleks kasutatakse maapealseid keskusi,
kosmosest tulevat ilma infot
ja paljusid teisi lähteandmeid.
Kasutajasegmendid võtavad vastu satelliitidelt saadetava info, ja
arvutavad
selle alusel oma asukoha. GPS
võimaldab siduda andmeid konkreetse asukohaga ruumiandmebaasis –
GIS.
Lisaks
saab seadmeid ja masinaid jälgida reaalajas ning salvestada nende
teekonda ja huvipakkuvaid parameetreid.
3.2.
SatelliididSatelliidilt
tehtava seire ruumiline ulatus on palju suurem kui lennukilt ja
keskkonna mõjud palju väiksemad (hõredad gaasid, päikesetuul),
kuid lennutrajektoor on rangelt kindlaks määratud. Lennu ajal
saab seda
korrigeerida vaid väikeses ulatuses, sõltuvalt sellest,
kui palju on selleks kütust. Maalähedane
orbiit on ligikaudu
ringikujuline ja maapinnast umbes 500-2000 kilomeetri kaugusel. Kõige
odavam on satelliit viia ekvatoriaalsele orbiidile, kuid sellisel
juhul on satelliidi nägemiskaugus piiratud. Kui satelliit viia
polaarsele orbiidile siis iga umbes pooleteisttunnist tiiru on Maa
pöörlemise tõtu aluspind vahetunud ja satelliit skaneerib uut ala.
Enamik Maa pinna seiramiseks mõeldud satelliite
liiguvad lähispolaarsetel
orbiitidel . Väiksema lahutusvõimega,
kuid
suurema nägemiskaugusega geostatsionaarne orbiit, kaugusega 42 170
km Maa keskpunktist, on teine rohkesti kasutatav orbiit
seiresatelliitide jaoks. Teoreetiline
vaatevälja poollaius Maa
kumerust arvestades on 81°,
kvantitatiivseks analüüsiks kõlblik on 55° ja kvalitatiivseks
65°. Nagu
eelnevast nähtub, on Eesti vaatluskõlbuliku ala
piiril (põhjalaius 57–59°). Suureks eeliseks on see, et mitme satelliidi
olemasolul geostatsionaarsel orbiidil saab jälgida suuremat osa
Maast pidevalt, mis on väga oluline suhteliselt kiirete
meteoroloogiliste protsesside vaatlemisel. Kahjuks
ei saa geostatsionaarsel orbiidil tiirleva satelliidi abil jälgida
polaaralasid . Üks võimalus seda puudust kompenseerida on nn Molnia
orbiit. Molnia puhul on Maast
kaugeim punkt 42 000 km kaugusel Maa
keskmest ja lähim punkt 6900 km kaugusel. Selline satelliit veedab
suurema osa ajast kaugeima punkti lähedal ja tema nurkkiirus valitud
suurel
laiuskraadil asuva punkti suhtes on sel ajal väike. Pideva
kvaliteetse vaatlusrea saamiseks piisab kolmest niisugusest
satelliidist. Siiani pole sellist orbiiti kaugseires kasutatud, kuid
potentsiaali oleks.
3.3.
DetektoridOptilise
kiirguse detektorid jagunevad fotograafilisteks ja
elektro-optilisteks, mis omakorda jaotatakse lainepikkuse diapasooni
järgi nähtava ja lähis-infrapuna kiirguse ehk VIR detektoriteks ja
soojusliku infrapuna ehk TIR detektoriteks. Viimase kahe füüsikalised
printsiibid osaliselt kattuvad. Fotograafilist meetodit kasutatakse
peamiselt seireks lennukilt, sest fotomaterjali ilmutamiseks on vaja
tuua see laborisse. Tüüpiline aerofotoaparaat kasutab filmi
laiusega 230 mm ja ruumilise lahutusega u. 50 punkti millimeetril,
filmirullis on tavaliselt kuni 1000 kaadrit. Tavaline nn.
Pankromaatiline film on tundlik valgusele lainepikkusega alla 720 nm.
Alumise piiri seab lääts, mis tavalise klaasi korral laseb läbi
valgust alates 350 nm ja kvartsklaasi korra alates 300 nm.
Lähis-infrapuna kiirguse jaoks saab filmi ülemise tundlikkuspiiri
tõsta 900 nanomeetrini. Kasutatakse mustvalgeid filme, värvifilme
ja valevärvides filme infrapunakiirguse jaoks.
Fotokordisti on väga
tundlik kiiretoimeline mõõteriist. Tema puudused on tundlikkus
mehhaanilistele vigastustele, suured mõõtmed ja kõrge tööpinge.
Fotodiood on
diood , millele rakendatud
pinge toimel tekib vooluimpulss kui selles neeldub
footon . Pidev
valgus annab tulemuseks pideva voolu, mis sõltub valguse
intensiivsusest. Fotodiood on fotokordistist väiksemate mõõtmetega,
põrutuskindlam ja madalama tööpingega, seega kaugseires kõlblikum.
Kujutise saamiseks tuleb moodustada maatriks üksikutest
valgustundikest elementidest või skaneerida ühe elemendiga üle
vaatevälja. Maatriksi moodustamiseks kasutatakse enim CCD
vastuvõtjaid, mis on fotodioodist kompaktsemad. See on
pooljuhtseade , mis koosneb
paljudest ühesugustest elementidest järjestikühendustest.
Igas elemendis
tekkivad valguse toimel laengud, mis säilivad.
Laenguid saab sobiva pingevalikuga liigutada ühest elemendist teise
kuni ahela otsani, kus need arvestatakse.
Termiline infrapuna piirkond on lainepikkus vahemikus 3 – 15 mm, millele
vastavad footoni
energiad 0.1-0.4 eV. Et sensori enda tekitatud
soojuslikud footonid ei varjutaks signaali, tuleb see jahutada vedela
lämmastiku või vedela heeliumi temperatuurini. TIR-sensorites
kasutatakse ka termistorbolomeetri põhimõtet – see on
pooljuht ,
mille takistus sõltub temperatuurist, mida mõjutab pealelangev
infrapunakiirgus . Kui on vaja mõõta kiirgust lainepikkusega üle 15
mm, siis kasutatakse termopaari.
Kujutamise
saamiseks salvestatakse kahemõõtmelise maatriksi korral kogu
kujutis eelistatult korraga. Kui aga elemendid ei reageeri küllalt
kiiresti võrreldes seireplatvormi liikumiskiirusega, siis
seadistatakse moonutuste vältimiseks detektor jälgima teatud ajal
kindlat
maastikut mille järel
kaader vahetatakse. Ühemõõtmelise
detektori korral peab liikuv süsteem skaneerima üle vaatevälja
laiuse . Nullmõõtmelise detektori puhul aga üle nii laiuse kui
pikkuse. Tavaliselt
saavutatakse see võnkuva või pöörleva peegli
abi, mis skaneerib hetkelist vaatevälja. VIR-piirkonnas on
põhiliseks rakenduseks üleujutuste, lume ja jää, ning madalamate
veekogude sügavuse kaardistamine. Meie fütoplanktoni hulka saab
mõõta valguse peegeldumise põhjal klorofülli neeldumisribas 500 –
600 nm juures. TIR-piirkonnas saadud kujutistelt saab määrata
veepinna soojust. Objekti
heleduse kujundavad objekti temperatuur,
kiirgusvõime ja muutused kiirguses atmosfääri läbimisel.
Merepinda saab TIR-piltidelt määrata otseselt, sest vee kiirgavus
on püsiv ja hästi teada. Teatav probleem on moonutus atmosfääri
läbimisel. Tuleb ka silmas pidada, et kuna
soojuslik infrapunakiirgus neeldub kõigest 0.02-millimeetrises veekihis, siis
ei ole nii mõõdetud temperatuur sama, mis termomeetriga kasvõi
mõnesentimeetrisest pinnakihist mõõdetu. Põhjuseks on kiirguslik
soojenemeine ja
jahtumine aurumise tõttu.
Maa
soojuskiirguse energiamaksimum on soojuslikus infrapunases
piirkonnas, kuid energiat on mõõdetaval hulgal ka veel
mikrolainepiirkonnas. Passiivse mikrolaineradiomeeter on mõõteriist,
mis mõõdab kiirgust selles spektrivahemikus (0.3 – 6 cm) Sellise
kiirguse footonite energia on vaid mõni meV, mistõttu nad ei tekita
elektron-auk
paare pooljuhtides. Neid saab detekteerida metallist
antenniga, milles hakkavad vahelduvvälja mõjul liikuma vabad
elektronid. Antenn on tavaliselt paraboolse kujuga, mis koondab
pealelangevad paralleelsed kiired vastuvõtjasse. Põhimõttelise
piirangu radiomeetri ruumilisele lahutusvõimele seab antenni suurus.
Väikseim eristatav pildiosa lainete difraktsiooni tõttu on
võrdeline lainepikkuse ja antenni läbimõõdu jagatisega.
Mikrolaineradiomeetri tundlikkus kiirgusele sõltub temperatuurist.
Kui kiirguse allikas ja vastuvõtja on samal temperatuuril, siis
antenni omamüra on signaalist tugevam ja detekteerimine peaaegu
võimatu. Signaali-müra suhet saab parandada ajalise
keskmistamisega. Passiivse mikrolaineradiomeetria põhiline
rakendus on merepinna temperatuuri määramine. Erinevalt soojuslikust
infrapunakiirgusest neeldub mikrolainekiirgus alles umbes 1 cm
paksuses vee pinnakihis. See võimaldab määrata tõelist
veetemperatuuri pinnakihist täpsusega umbes 1K. Teiseks saab mõõta
veepinna
karedust ehk lainekõrgust kiirguse polarisatsiooni põhjal.
Karedusest omakorda saab hinnata tuule tugevust, mille mõõtmise
täpsus sellel meetodil on umbes 2 m/s. Kuna jää kiirgamisvõime
sagedustel alla 30 GHz on palju suurem kui vee oma, siis saab heleduse järgi
mikrolainealas eristada jääd ja vaba vett kui
ka eri vanusega merejääd.
3.4. Radar ja LIDARRadar
on kaugseire mõõteriist, mis kasutab kiiratud raadiolainete
tagasipeegeldumist uuritavalt objektilt. Praktikas kasutatavad
radarid on enamasti monostaatilised - raadiolainete
saatja on ühtasi
ka vastuvõtja (bistaatilise
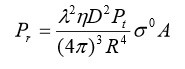
korral on saatja ja vastuvõtja eraldi). Kiirguse võimsust Pr, mille
radar pindalalt A vastu võtab, kirjeldab radarivõrrand:
kus
Pt on radari võimsus, R objekti kaugus radari antennist, λ
kiirguse lainepikkus ja η antenni
efektiivsus ehk sisuliselt kasutegur, mis on antenni oomilise
takistuse tõttu ühest väiksem. D on antenni suunatus, mis näitab,
kui palju kordi on kiirguse võimsustihedus tugevaima kiirguse suunas
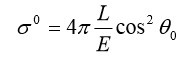
suurem kui keskmiselt üle sfääri. σ on
tagasihajumiskoefitsent:
kus
E on pealelangeva ja L peegeldunud kiirguse energeetiline heledus ja
θ kiirguse langemise
seniitnurk. Suurus, mis kannab endas informatsiooni aluspinna kohta
on L, mis üldjuhul sõltub nii kiirguse langemise seniitnurgast θ
kui ka asimuutnurgast φ. Saab
eristada σ kiirguse erinevate polarisatsioonitasandite jaoks, mis
annab täiendavat informatsiooni objekti kohta.
Mikrolaineskateromeetria on meetod σ määramiseks, mis ei
eelda signaali põhjal kujutise loomist. Varieerides seniitnurka θ ja
uurides σ sõltuvust, saame rohkem teavet aluspinna omaduste kohta.
Seda saab teha platvormi liikumisel uuritava piirkonna jälgimisel
eri seniitnurkade alt, eri nurkade alt peegelduva kiirguse doppleri
nihke erinevuse järgi ja ala skaneerimisel eri suundades saadetavate
kiirgusimpulsside abil.
Lidar
on valguskiire tagasipeegeldumisel põhinev aktiivse kaugseire
meetod, seega radari optiline
analoog . Laseraltimeetria on lidari
lihtsaim rakendus. Ülal paiknev laser
saadab lühikesi
valgusimpulsse alla, mis peegelduvad maapinnalt. Peegeldumise aja ja
valguse kiiruse järgi saab leida pinna kauguse seireplatvormist.
Seireplatvormi liikumisel registreerib lidar aluspinna profiili.
Lidari suurim eelis radari ees on väga peen kiir, mis võimaldab
väga suurt ruumilist täpsust aluspinnal [8].
3.5.
Andmete töötlus ja mudeliteks
integreerimineAndmete
kogumisele järgneb nende töötlemine, mis
on omamoodi kunst (selle põhjalik käsitlus ei mahu käesoleva
referaadi mastaapi). Okeanograafias
ei piisa tervikpildi sünteesimisest sõnalise kirjelduse abil, vaid
praktiliste kasutuste jaoks on tarvis toota võimalikult
kvaliteetseid andmeprodukte. Valmis kaartide ja graafikute asemel
hakkavad üha rohkem levima numbrilised produktid, sealhulgas
horisontaalkoordinaatide, sügavuse/kõrguse ja aja järgi
diskretiseeritud andmed, mille saamise metoodika peab olema
kirjeldatud ja täpsus kontrollitud. Satelliitidelt määratavad
andmed esitatakse enamasti just digitaalsetes formaatides, kust iga
kasutaja saab endale vajalikud töötlused teha.
Kaugseire andmete
puuduseks on
vertikaalse
mõõte
puudumine.
Veepinnal
nähaolevad mustrid sõltuvad
olulisel määral
sellest, mis toimub sügavamates veekihtides. Andmete
täiustamiseks on tarvis
kaugseire andmed ning erinevatelt vaatlusplatvormidelt mõõdetavad
in situ
vaatlusandmed integreerida andmeid assimileerivatesse mudelitesse.
Sellised integreeritud observatooriumid leiavad üha rohkem
tähelepanu ja finantseerimist. Näiteks Eesti teadustaristu
teekaardi raames käivitati mahukas investeerimisprojekt „Eesti
Keskkonnaobservatoorium”, kus Urmas Lips Tallinna Tehnikaülikooli
Meresüsteemide Instituudist koordineerib Keri saare lähedale sügava
mere uuringute automaatjaama väljaehitamist ning Georg Martin Tartu
Ülikooli Eesti Mereinstituudist koordineerib rannikumere välibaasi
kaasajastamist Kõigustes [9].
Euroopas on mereseisundi
vaatluste ja prognooside arendamisel alates 2009. aastast käimas
suuremahuline projekt MyOcean, mille on ellu kutsunud Euroopa Liidu
Kosmoseprogrammi algatus
COPERNICUS . Kolm komponenti – kaugseire,
in situ
vaatlused ja mudelid – on sealgi
esindatud suhteliselt võrdse
kaaluga. Eesti teadlased on aktiivsed nii MyOcean liinis kui ka
laiemalt.
Kasutatud kirjandus[1]
Peterson,
U.,
Eerme K., Lang M.,
Nilson T., Kuusk A., Väljataga K. (2014)
„Kaugseire
koht ja tähendus loodusandmete kogumises ning andmetöötluses.”
Kaugseire Eestis
2014, lk 8
[2]
(2012)
Keskkonnauuringu meetodid 12
Kättesaadav:
http://euroakadeemia.ee/materjalid/KU-meetodid-12.pdf [3]
Elken J. (2013) „
Kosmosest merele
vaadates ehk mida sealt on näha ja mis on peidetud.” Horisont
nr 3, 1967 – 2015.
[4]
Ibid [5]
Kutser
T. (2011)
„
Riikliku keskkonnaseire mereseire allprogrammi
rannikumere kaugseire alaprogrammi aruanne 2011”, TÜ Eesti
Mereinstituut.
[6]
Vahtmäe
E., Kutser T., (2014) „Vee
sügavuse ja merepõhja tüüpide kaardistamine optiliselt madalates
rannavetes”
Kaugseire Eestis 2014,
lk 166 – 173.
[7]
(
2000) Euroopa Liidu
veepoliitika raamdirektiiv, Kättesaadav:
http://www.envir.ee/sites/default/files/veepoliitika_raamdir32000l0060et.pdf [8]
(2012)
Keskkonnauuringu meetodid 13
Kättesaadav:
http://euroakadeemia.ee/materjalid/KU-meetodid-13.pdf [9]
Elken
J. (2013) „
Kosmosest
merele vaadates ehk mida sealt on näha ja mis on peidetud.”
Horisont
nr 3, 1967 – 2015.






























Kõik kommentaarid