Navigatsioon Laeva triiv Tuule mõjul hakkab laev liikuma teatud nurga võrra allatuult. Seda nurka nimetatakse triivi nurgaks . Trrivi nurka mõõdetakse ja märgitakse juurde mis suunalisest tuulest ta on tingitud. Vasakpoolset tuule poolt tekitatud triivinurka . Loetakse positiivseks ja parem poolset triivinurka negatiivseks. Triivi mõjul hakkab laev kalduma kõrvale oma tõelisest kursist ja hakkab liikuma nn. Kaardikursi järgi. Kui muudetakse laeva kurssi, siis muutub ka triivi nurga väärtus. Praktiliselt on triivi nurka . Võimalik kindlaks määrata kas laeva asukoha kindlaks määramiste abil või ka ligikautselt laeva kiiluvee ja laeva diametraal tasapinna vahelise nurga mõõtmise abil. Laeva triiv Ng KrK TK TK KK 90´,5 (-0,5)=+5,0 19.05 ...
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut ANTENNI ASENDI (NURGA) JUHTIMINE KODUNE TÖÖ NR 1 aines "Automaatjuhtimissüsteemid" Miko Allikmäe 061643IASB IASB51 Juhendaja:Eduard Petlenkov Esitatud: 26.10.2008 Kaitstud: Õppejõud: Tallinn 2008 Tähistuste selgitused X(t) antenni nurk [rad] X2 antenni nurga muutumise kiirus [rad/s] X2max maksimaalne lubatud antenni nurga muutumise kiirus [rad/s] J kõikide keerlevate osade inertsmoment [kg*m2] Bs igasuguste sumbumiste summaarne koefitsient [kg*m2/s2] M mootori poolt arendatav mom...
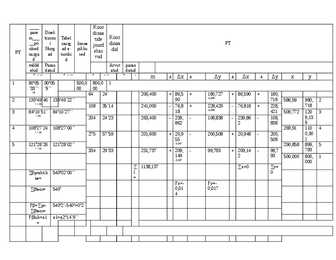
____ Koor pare Direk dinaa m___ tsioon Tabel tide Koor __po i inurg Joone juurd dinaa PT olsed Nurg ad e. pikku did PT ekas nurga ad rumbi sed vud d d mõõd Paran Arvut paran etud datud atud datud ° ' '' ° ' '' ° '" ° ' m ± x ± y ± x ± y x y 0 0 1 90 05 90 05 50...
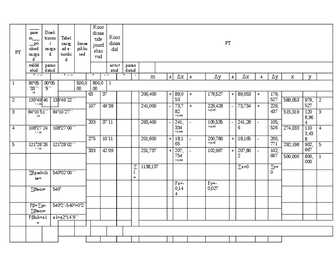
____ Koor pare Direk dinaa m___ tsioon Tabel tide Koor __po i inurg Joone juurd dinaa PT olsed nurga ad e. pikku did PT ekas nurga d rumbi sed vud d d mõõd paran arvut paran etud datud atud datud ° ' '' ° ' '' ° '" ° ' m ± x ± y ± x ± y x y 0 0 1 90 05 ...
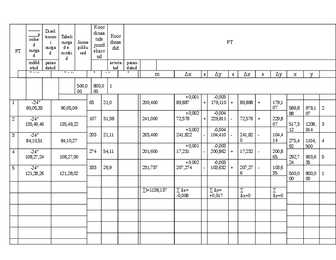
_____ Koor Direk dinaa ____p tsioon Tabeli Koor oolse tide i nurga Joone dinaa PT d juurd nurga d e. pikku did PT nurga ekasv d rumbi sed d ud d mõõd paran arvuta paran etud datud tud datud ° ' '' ° ' '' ° '" ° m x ± y ± x ± y x y ...
Tallinna Tehnikaülikool Automaatjuhtimissüsteemid, ISS0021 Labor nr. 1 Antenni mudel Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed [X1]- antenni nurk [rad] '[X2] - antenni nurga muutumise kiirus J - kõikide keerlevate osade inertsmoment [kg*m2] J = 20 Bs - igasuguste sumbumiste summaarne koefitsient [kg*m2/s] Bs = 16 M - mootori poolt arendatav moment [kg*m2/s2], M = k*U(t) Md - tuule häiringu moment [kg*m2/s2] e olekuhäiring Xh U(t) - mootori sisendpinge [V] A = 0 1.0000 - olekumaatriks 0 -0.4000 B=0 - sisendmaatriks 0.1945 C - väljundmaatriks D - otsesidemaatriks G - häiri...
MHE0042 MASINAELEMENDID I Kodutöö nr. 4 Variant nr. Töö nimetus: A -7 Liistliide ja hammasliide arvutus B -7 Üliõpilane (matrikli nr ja nimi) Rühm: Juhendaja: MASB-51 A.Sivitski Töö esitatud: Töö parandada: Arvestatud: KODUTÖÖ NR. 4 Liistliide ja hammasliide arvutus Projekteerida listliide võlli ja hammasratta ühendamiseks (pöördemomenti ülekandmiseks). Antud on võllile mõjuv pöördemoment M, võlli läbimõõt d1 ja rummu laius lv . Joonis 1.Liistliide Joonis 2. Hammasliide Koormus ja võlli läbimõõt valitakse vastavalt õppekoodi viimasele numbrile (): A 0 ...
Praktikum II Pöördpendel liikuval alusel ja süsteemi stabiliseerimine tagasisidega 1.Pöördpendli lihtsustatud mudel (vt demoks nt https://youtu.be/bENXhqIPkBs ) m l x F M Olekumudeli muutujad ja parameetrid: - pendli nurk [rad] x aluskäru asend [m] M aluskäru mass [kg] m pendli varda mass [kg] l - kaugus pendli varda raskuskeskmeni [m] g - raskuskiirendus [m/s2] F jõud aluskäru liigutamiseks [N] (mudeli sisend u) Olekumudel (olekuvõrrandi maatriksid) ja olekumuutujate vektor X x1 - nurk X& = A X + B U & x - nurga tuletis ...
Vastused 1.1. Sissejuhatus, aine alusmõisted, skeemid, klassifikatsioonid 1. Tootmine on protsess mille käigus valmistatakse esemeid ja materjale.Tooted on tootmisprotsessis valmivad esemed ja materjalid. Ka mis tahes ese või esemete kogum,mida ettevõte (aga miks mitte ka üksikisik!) valmistab. Tooteid tarbib inimene vahetult või vajab tootmise edasiarendamiseks. Tooteks võib olla ka teenus, projekt, programm, telesaade jms. Põhitoode on selline toode, mida valmistatakse müügiks. Põhitoodeteks on näiteks masinad,arvutid, autod, laevad, telerid jms; samuti aga ka mitmesuguste seadmete koostisosad -- detailid(kruvid, mutrid, kirjaklambrid, rõngastihend jne.) ja koostud ehk lihtsalt - komponendid. Abitoodeteks loetakse aga sellised tooted, mis on tootjale vajalikud põhitoodete valmistamisel ja mida mujal ei valmistata või mida pole mingil põhjusel kasulik teistelt osta. Need on kõigepealt mitmesugused töövahendid, -abinõud ja -riistad, mõn...
MHE0040 MASINAELEMENDID Kodutöö nr. 4 Variant nr. Töö nimetus: Liist- ja hammasliite arvutus A -7 B -1 Üliõpilane: Rühm: Juhendaja: MATB Alina Sivitski Töö esitatud: Töö parandada: Arvestatud: 12.12.12 1.Ülesande püstitus: 1. Teha liistliite ja hammasliite joonis. Joonisele panna kõikide vajalike mõõtmed (tähised). 2. Liistu valikul pakkuda kõik liistliite mõõtmed koos tolerantsidega. 3. Teostada liistliite tugevusarvutused 4. Pakkuda alternatiivne hammasliite variant. 5. Analüüsida, mis on saadud liite eelised ja puudused. Milliseid seondliiteid oleks mõtekas kasutada antud koormuse ja konstruktsiooni korral. 6. Kuidas valitakse lubatav muljumispinge kui liistu, rummu ja võlli materjal on erineva voolepiiriga? Antud andmed: Võllile mõjuv pöördemoment ...
Ehitiste projekteerimise instituut Ehituskonstruktsioonide õppetool EEK0050 Puitkonstruktsioonid LABORATOORNE TÖÖ NR 2 LAUPTAPPÜHENDUSE KATSE Üliõpilane: Hanna Jakobson Matrikli number: 150873CTF Töö esitatud: 12.05.2015 Töö kaitstud: Juhendaja: Elmar-Jaan Just Tallinn 2015 1. Katsekeha eskiis, koormusskeem, katsetabel Joonis 1.1. Katsekeha eskiis Joonis 1.2. Koormusskeem Tabel 1.1 2 2. α, Fc, Ft ja Fv arvutus. Koostatud Fc-uc ja Fv-uv graafikud. α = arctan(500/500) = 45° = 45*π/180 = 0,785 rad Fc = P/(2*cos α) Ft = P/2 Fv = P/2 Graafik 2.1 30.0 25.0 ...
TTÜ Üliopilane: Teostatud: Üliopilane: Kaitstud: Too nr. 13 OT Silma omaduste tundmaõppimine ning pikksilma suurenduse määramine Tööeesmärk: Silma omaduste Töövahendid:Pikksilm suurendusega 7/50 tundmaõppimine ning pikksilma Joonlaud 1 ± 0,005 m suurenduse määramine. Joonlaud 30 ± 0,05 cm Skeem Teoreetilised alused Silma pimetähn Pimetähn on koht silma võrkkestal, kuhu suubub nägemisnärv. Seal puuduvad valgustundlikud närvirakud. Kui mingi eseme kujutis langeb pimetähnile, siis me seda ei näe. Sellele vaatamata ei taju me vaateväljas musta kohta. Valgusaisting antakse peaajule mõlemast silmast ning lisaks sellele aju töötleb valgustundlikest närvidest tulevaid signaale nii, et me näeme nähtamatu piirkonn...
TTÜ MEHHATROONIKAINSTITUUT MHE0041 - MASINAELEMENDID 1 MASINAELEMENTIDE JA PEENMEHAANIKA ÕPPETOOL KODUTÖÖ NR. 4 LIISTU ARVUTUS Valida liist võlli ja hammasratta ühendamiseks ning kontrollida selle tugevus. Võllile mõjuv pöördemoment M, võlli läbimõõt d ja võlli ja rummu ühenduspikkus (rummu laius) l valida tabelis õppekoodi viimase A ja eelviimase B numbrite järgi A 0 1 2 3 4 5 6 7 8 9 M, 130 250 420 650 1000 1400 1900 2600 3300 4300 (Nm) d, 20 25 30 35 40 45 50 55 60 65 (mm) B 0 1 2 3 4 5 6 7 8 9 l, 45 50 55 60 65 70 75 80 ...
Antsla Gümnaasium 8B klass CARL FRIEDRICH GAUSS Referaat Juhendaja: õpetaja 2008 Sisukord Sissejuhatus 3 Carl fr. Gauss 4 Kokkuvõte 7 Kasutatud allikad 8 Lisad 9 Sissejuhatus Valisime Carl Friedrich Gaussi sellepärast et ta tundus meile kõige sobivam matemaatik.Raamatust vaadates tundus just tema jutt ja nimi huvitavam kui teised. Gauss olevat ilmutanud oma matemaatilisi võimeid juba siis kui ta oli kolme aastane. Ta oli väga tark laps.Ta arvutas alati isaga koos arveid ja oli omapärane poiss. Gaussi aju kaalus kolm naela ehk 1492 grammi. Carl fr. Gauss Matemaatikute vürsti gaussi sugupuu oli kõike muud kui vürstilik. Ta sündis armetus hütis vaeste vanemate lapsena 30. aprill 1777 Braunschweigis. Isapoolne vanaisa Jürgen Gooss (1712-1774), vaene talunik oli kolinud Braunschweigi...
3. Laeva püstuvus 3. LAEVA PÜSTUVUS 3.1. Üldmõisted Püstuvuseks nimetatakse laeva võimet vastu panna teda tasakaaluasendist hälvitavatele välisjõududele ja pöörduda pärast nende jõudude lakkamist tagasi algasendisse. Laevateoorias vaadeldakse eraldi: algpüstuvus (i.k. initial stability) püstuvus suurtel kreeninurkadel (i.k. stability at great angles of heel) Eraldamine on tingitud asjaoludest, et algpüstuvuse arvutamisel võib rakendada lihtsustusi ja kasutada matemaatilisi seoseid, aga suurtel kreeninurkadel saab püstuvust määrata vaid graafiliselt (või arvuti eriprogrammi abil). Laeva püstuvust jälgitakse kallutades teda kahe risttasandi suhtes ja nimetus on vastavalt: põiki püstuvus külgkalde ehk kreeninurga suhtes, piki püstuvus pikikalde ehk trimmi nurga suhtes. Euleri teoreemi järgi laeva kaldetelg lõpmatult väikesel kaldel läbib alati veejoonetasandi keset F. Praktikas on see teoreem ...
TTÜ MEHHATROONIKAINSTITUUT MHE0041 - MASINAELEMENDID I MASINAELEMENTIDE JA PEENMEHAANIKA ÕPPETOOL MHE0042 MASINAELEMENDID I Kodutöö nr. 4 Variant nr. Töö nimetus: A-0 B-5 Liisteliite ja hammasliite arvutus Üliõpilane (matrikli nr ja nimi) Rühm: Juhendaja: - - .......A.Sivitski.............. - ..................................... Töö esitatud: Töö parandada: Arvestatud: dets 2011 TTÜ MEHHATROONIKAINSTITUUT MHE0041 - MASINAELEMENDID I MASINAELEMENTIDE JA PEENMEHAANIKA ÕPPETOOL KODUTÖÖ NR. 4 Liistliide ja hammasliide arvutus Projekteerida ...
Tallinna Tehnikaülikool Laboratoorne töö 5 Metalli massi määramine reaktsioonis eralduva gaasi mahu järgi 25.09.13 Tallinn Töö eesmärk. Gaasiliste ainete mahu mõõtmine, gaaside segud ja gaasi osa rõhk, arvutused gaasidega reaktsioonivõrrandi põhjal. Kasutatud mõõteseadmed, töövahendid ja kemikaalid. · 10%-ne soolhappelahus; · 5,0...10,0 mg metallitükk (magneesium); · seade gaasi mahu mõõtmiseks; · mõõtesilinder (25cm3); · lehter; · filterpaber; · termomeeter; · baromeeter; · hügromeeter. Töö käik. 1. Eemaldada katseklaas ning loputada see hoolikalt destilleeritud veega. 2. Sättida büretid ühele kõrgusele ning kontrollida, et vee nivoo oleks mõlemas büretis silma järgi ühel kõrgusel ja büreti keskel. 3. Eemal...
EESTI MEREAKADEEMIA Laevamehaanika õppetool Kursusetöö Õppeaines Laeva abimehhanismid Rooli masin Kadett: Sergei Dombrovski Õppegrupp: MM42 Õppejõud: Jaan Läheb Kursusetöö: Laeva abimehhanismid 2 Sergei Dombrovski MM42 Tallinn 2013.a. Sisukord SISUKORD............................................................................................................................. 2 KURSUSETÖÖ ÜLESANNE................................................................................................ 3 1.SELGITAV OSA...................................................................................................
Newtoni I ehk inertsiseadus väidab, et keha liigub ühtlaselt sirgjooneliselt või seisab paigal, kui talle mõjuvate jõudude resultant võrdub nulliga. Newtoni II väidab, et kehale mõjuv resultantjõud on võrdne keha massi ja kiirenduse korrutisega. . Newtoni III väidab, et kaks keha mõjutavad teineteist jõududega, mis on suuruselt võrdsed ja suunalt vastupidised. Gravitatsiooniseadus kaks masspunkti tõmbuvad üksteise poole jõuga, mis on võrdeline nende massidega ning pöördvõrdeline nendevahelise kauguse ruuduga: G on gravitatsioonikonstant, m1 on esimese keha mass, m2 on teise keha mass, r on kehadevaheline kaugus. Gravitatsioonikonstandi eksperimentaalseks väärtuseks on saadud 6,674×10-11 N·m2·kg-2. Impulsi jäävuse seadus igasuguse kehade süsteemi impulss on jääv, kui sellele süsteemile ei mõju väliseid jõude. Impulsi jäävuse seadus kehtib nii Newtoni mehaanikas, erirelatiivsusteoorias kui kvantmehaanikas. See kehtib sõlt...
Tallinna Tehnikaülikool Automaatjuhtimissüsteemid, ISS0021 Labor nr. 2 Pöördpendli modelleerimine ja juhtimine. Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed X0 = [-0.1; 0; 0; 0] - algolek Xs = [0; 0; 0,7; 0] seadesuurus X(t) - olek A = 0 1 0 0; 17.64 0 0 0; 0 0 0 1; -0.784 0 0 0 ] B = [0; -0.3333; 0; 0.2] C=eyes(4) D=zeros(4,2) G = [0; 0; 0; 0] - olekuhäiringu sisendmaatriks M= 5 - mass X1 pendli nurk rad X2 - pendli nurga muutumise kiirus X3 - pendli asend X4 - pendli asendi muutmise kiirus U(t) - Jõud N, 2. Vormistatud eksperimendi lühiselgitus Ülesandeks oli pendli hoidmine püsti asendis nii, et juhtimine toimuks võimalikult kiiresti ja paramee...
SIDUR, DIFERENTSIAAL, PEAÜLEKANNE LABORATOORNE TÖÖ Õppeaines: JÕUÕLEKANNE III Tallinn 2018 SISUKORD 1. SIDUR..............................................................................................................................................3 2. PEAÜLEKANNE.............................................................................................................................5 3. DIFERENTSIAAL..........................................................................................................................6 4. POOLTELG.....................................................................................................................................7 5. VIIDATUD ALLIKAD.....................................................................................................................8 ...
SISUKORD KURSUSEPROJEKTI ÜLESANNE........................................................................... 3 SISSEJUHATUS..........................................................................................................4 1 ARHITEKTUURNE OSA......................................................................................... 5 1.1 Hoone üldiseloomustus.............................................................................................................. 5 1.2 Hoone tehnilised andmed .......................................................................................................... 5 1.3 Mahulis-plaaniline lahendus.......................................................................................................6 1.4 Tehnoökonoomilised näitajad.....................................................................................................7 1.5 Välisviimistlus..................................
Sander Schmidt KODUSED ÜLESANDED Õppeaines: TOLELEERIMINE JA MÕÕTETEHNIKA Mehaanikateaduskond Õpperühm KMI-21 Juhendaja: lektor Mait Purde Tallinn 2011 Ülesanne nr. 1 Lähteandmed: Ø90N6/h5 Lahenduskäik: N 6 0 , 016 1. Ø90 0 , 038 h5 0 , 015 2. Nimetus Ava Võll Tähistus Suurus mm Tähistus Suurus mm 1. Nimimõõde D 90 d 90 2. Ülemine piirhälve ES -0,038 es 0 3. Alumine piirhälve EI -0,016 ei -0,015 4. Suurim piirmõõde Dmax ...
TTÜ ehituskonstruktsioonide õppetool Raudbetoonkonstruktsioonide üldkursus I Vello Otsmaa Johannes Pello 2007.a Raudbetoonkonstruktsioonide üldkursus 1 SISSEJUHATUS 1 Raudbetooni olemus Raudbetoon on liitmaterjal (komposiitmaterjal), kus koos töötavad kaks väga erinevate oma- dustega materjali: teras ja betoon. Neist betoon on suhteliselt odav kohalik materjal, mis töö- tab hästi survel, kuid üsna halvasti tõmbel (betooni tõmbetugevus on 10-15 korda väiksem survetugevusest). Teras seevastu töötab ühteviisi hästi nii survel kui ka tõmbel, kuid tema hind on küllalt kõrge. Osutub, et survejõu vastuvõtmine betooniga on kordi odavam kui tera- sega, tõmbejõu vastuvõtmine on kordi odavam aga terasega. Siit tulenebki raudbetooni ma- janduslik olemus: võtta ühes ja samas konstruktsioonis esi...
Keevitus, pealesulatus, termolõikamine, jootmine. NB! Meil oli see viimane test ja ei tulnud need küsimused! Tulid hoopis jpg-failidena (KMT lõikamise test) toodud küsimused. 1) Termomehaaniliseks keevituseks loetakse: joonkeevitust (joonkontaktkeevitust) 2) Keevituse vooluallika välistunnusjoon väljendab: keevitusvoolu ja keevituspinge vahelist sõltuvust. 3) Keevitamisel vahelduvvooluga keevitustrafo keevitusvoolu reguleeritakse: primaar- ja sekundaarmähiste vahelise vahekauguse muutmise teel. 4) Käsikaarkeevituse vooluallikate iseloomulikumaks tunnuseks on: voolu reguleerimisvõimalus. 5) Keevituse vooluallika tühijooksupinge on: 220-380 või 60-90(vahelduvool ja alalisvool) 6) Madalsüsinikterastel asub kõige kõrgemate mehaaniliste omadustega ala keevitamisel termomõjutsoonis: normaliseerimispiirkonnas. 7) Keevitatava materjali ebaühtlane kuumenemine termomõju tsoonis keevitamisel põhjustab: termopingeid 8) Keevitatavate materjalide ett...
Lõiketõõtluse KT. NR. 2 1. Instrumendi kulumine Kulumine mehaanilisel kulumisel o Peamine nähtus lõikeprotsessis, põhjustab lõikevõime vähendamist. o Kantakse lõikeriista tööpindadelt ära materjali osakesi. o Suurenevad lõikejõud, temperatuur o Halvenevad pinnasiledus ning teriku vastupanu lõikejõududele. Instrumendi eluiga o Instrumendi eluiga on funktsioon lõikekiirusest Vc ja ettenihkest fn. o Mida suuremad lõiketöötlus režiimid seda väiksem on instrumendi eluiga o Instrumendi elueaks loetakse maksimaalsetel lubatud režiimidel 15 min tööaega. Kulumise liigid o Abrasiivne kulumine – Tekib kahe pinna omavahelisel hõõrdumisel, kõvad osakesed (karbiidid) kriimustavad pinda ning kannavad osakesi minema. o Difusioonkulumine – Keemiline protsess kõrgel temperatuuril ja rõhul, mille käigus toimub ainete iseeneslik segunemin...
TALLINNA TEHNIKAÜLIKOOLI TALLINNA KOLLEDZ Kinnisvara haldamine NIMI SILIKAATTELLISTEST MÜÜRITIS Referaat Õppejõud: NIMI Tallinn 2011 SISUKORD SISSEJUHATUS Silikaattellis on tellis, mis on valmistatud lubja ja liiva segu kokkupressimisel ja sellele järgneva kuumutamisel autoklaavis, veeaurus, nii et moodustub hüdrosilikaatidest side- ainel põhinev tehiskivi. Tehnoloogia pärineb 1880. aastatest, Eestis valmistatakse silikaattelliseid 1910. aastast. Silikaattellise tavamõõtmed on 88x120x250 mm. Müüritis on ettenähtud seotisega ja mördiga kokku liidetud müürikivide ühendus. Antud referaadis on müürikiviks silikaattellis. Seotis on silikaattelliste asetus müüris, mis kindlustab müüri töötamise ühtse tervikuna. Silikaattellistest müüritiseks võib olla elamu välisseinad, korstnapitsid (...
6. ELEKTRIAJAMITE ÜLESANDED Tootmises kasutatakse töömasinate käitamiseks rõhuvas enamuses elektriajameid. Ka pneumo- ja hüdroajamid saavad oma energia ikka elektrimootoritega käitatavatelt kompressoritelt ja hüdropumpadelt. Elektriajam koosneb elektrimootorist ja juhtimissüsteemist, mõnikord on vajalik veel muundur ja ülekanne. Elektriajamite kursuse põhieesmärk on valida võimsuse poolest otstarbekas elektrimootor, arvestades ka kiiruse reguleerimise vajadust ja võimalikult head kasutegurit. Järgnevad ülesanded käsitlevad selle valikuprotsessi erinevaid külgi. 6.1. Rööpergutusmootori mehaaniliste tunnusjoonte arvutus Ülesanne 6.1 Arvutada ja joonestada rööpergutusmootorile loomulik ja reostaattunnusjoon. Mootori nimivõimsus Pn = 20 kW, nimipinge Un = 220 V, ankruvool Ia = 105 A, nimi- pöörlemissagedus nn = 1000 min-1, ankruahela takistus (ankru- ja lisapooluste mähised) Ra = 0,2 ja ankruahelasse on lülitatu...
Peeter Raesaar ÕHULIINIDE PROJEKTEERIMISE KÜSIMUSI ELEKTRIRAJATISTE PROJEKTEERIMINE III osa 1. Sissejuhatus. Normatiivdokumendid. Üldpõhimõtted. 2. Õhuliinidele mõjuvad koormused 3. Juhtmete ja piksekaitsetrosside arvutus 4. Mastide arvutusest 5. Vundamentide arvutusest 6. Isolaatorid 7. Õhuliinide tarvikud 8. Trassi valik, mastide paigutus trassil 2006 ÕHULIINIDE KONSTRUKTIIVOSA PROJEKTEERIMINE 1. SISSEJUHATUS 1.1 NORMDOKUMENDID. Lähtuda tuleb reast normdokumentidest. Olulisemad: • EVS-EN 50341-1:2001: Elektriõhuliinid vahelduvpingega üle 45 kV /Overhead electrical lines exceeding AC 45 kV/ – Eesti versioon etteval- mistatud ja kuulub peatselt kinnitamisele Eesti Standardikeskuse käskkir- jaga. Hõlmab õhuliinide ja tema komponentide (juhtmed ja piksekaitsetrossid, ...
Loeng nr 4. Ehitusprojekt ja ehituskulud, ehituskulude liigitamine ja töömahtude arvutamine 4.1. Ehitusprojekt ja ehituskulude prognoosimine Omanik kannab kõik ehitusprojekti elluviimisega seotud kulud ning projekti alustamisotsuse tegemiseks tuleb tal kulud võimalikult täpselt määratleda (prognoosida), et veenduda hanke korraldamise otstarbekuses. Ehituskulude prognoosimine projekti arengu varases staadiumis toimub üldjuhul analoogmeetodil kavandatava ehitise põhiparameetrite alusel; hoonete puhul lähtutakse ruumiprogrammist ja soovitud pinna- või mahunäitajatest. Hoone ehitusprojekti (EVS 811:2012) kohaselt on ehitusprojekt jaotatud staadiumiteks, mille puhul liigutakse üldpõhimõtetest detail-lahendusteni. Sama kehtib ehitusprojekti maksumuse prognoosimisel ja vastava tasemega kulueelarvete koostamisel - esimesed ehitusprojekti kulude esmased prognoosid põhinevad vaid ideekäsitlusel ja on hinnangulised, järgnevatel projekti areng...
Millised on nivelleerimise viisid? Nivelleerimiseks (kõrguslikuks mõõdistamiseks) nimetatakse selliseid mõõtmisi, mille järgi määratakse maapinna punktide omavahelisi kõrguslikke erinevusi ehk kõrguskasve. Kõrguskasvude järgi arvutatakse samade punktide kõrgused. Mis on geomeetriline nivelleerimine? Geomeetrilisel nivelleerimisel määratakse punktidevaheline kõrguskasv horisontaalse viseerimiskiire ja vertikaalsete lattide abil. Horisontaalse viseerimiskiire tagab instrument, milleks on nivelliir. Mis on trigonomeetriline nivelleerimine? Trigonomeetriline nivelleerimine on punktidevahelise kõrguskasvu määramine viseerimiskiire vertikaalnurga suuruse ja punktidevahelise kauguse järgi, arvestades instrumendikõrgust ja viseerimiskõrgust. Mis on nivelliir? Nivelliir on instrument, mis annab horisontaalse vaatekiire ning koos nivelleerimislattidega võimaldab määrata maastikupunktide kõrguslikke erinevusi ehk kõrguskasve. Millised on nivelliir...
MÕÕTMESTAMINE JA TOLEREERIMINE 2 ×16 tundi Teema Kestvus h 1. Sissejuhatus. Seosed teiste aladega 2 Mõisted ja terminiloogia. GPS standardite maatriksmudel 2. Geometrilised omadused. Mõõtmestamise 2 üldprintsiibid. Ümbrikunõue, maksimaalse materjali tingimus 3. ISO istude süsteem. Tolerantsiväljad 2 4. Istud. Võlli ja avasüsteem 2 5. Soovitatavad istud. Istude rahvuslikud süsteemid 2 6. Istude kujundamise põhimõtted 2 Istude analüüs ja süntees 7. Liistliidete tolerantsid. 2 Üldtolerantsid 8. Geomeetrilised hälbed. Kujuhälbed. 2 Suunahälbed 9. Viskumise hälbed. Asetsemise hälbed. Lähted 2 Nurkade ja koonuste hälbed ja tol...
Eksamiabimees 1.Geodeetiline otseülesanne. Geodeetiliseks otseülesandeks on ülesanne, kus on antud punkti A koordinaadid (xA, yA), kaldenurk punktilt A punkti B (AB) ning kahe punkti vaheline kaugus dAB. Antud: xA, yA, AB, dAB X yAB B Leida: xB, yB ? XB xB =xA+ xAB AB yB =yA+ yAB x,y- koordinaatide juurdekasvud, "+" vôi "-". dAB xAB Tuleb arvestada millise veerandi nurgaga on tegemist. XA A xAB = dAB *cosAB yAB = dAB *sinAB xB =xAB + xA 0 YA YB Y yB =yAB + yA 2.Geodeetiline vastuülesanne. Antud on 2 punkti koordinaadid (xA,yA,xB,yB) IV veerand I veerand ja leida tuleb nurk (AB) ja punktidevaheline kaugus dAB. x + x + Antud: xA, yA, xB, yB ...
Mehaaniline liikumine Taustsüsteem. Koordinaadid. Raadiusvektor. Tehted vektoritega. Liikumisvõrrand. Trajektoor. Kulg- ja pöördliikumine. Nihe ja teepikkus. Nurknihe. Ainepunkt-mõnikord võib liikumise uurimisel jätta kehade mõõtmed arvestamata: siis kui need on palju väiksemad kõikidest teistest mõõtmetest, millega antud ülesandes on tegemist. Ainepunkti asukoha ruumis saab määrata raadiusvektori r abil. Punkti liikumisel muutub vektor r üldjuhul nii suuruse kui ka suuna poolest. Taustsüsteem- taustkeha, sellega seotud koordinaadistik ja aja arvestamise alghetk mood. taustsüsteemi. Koordinaadid Keha koordinaadid võimaldavad määrata tema asukohta ruumis. Liikumise kirjeldamisel tuleb arvestada ka aega. Raadiusvektor- Punkti raadiusvektoriks nimetat. koordinaatide alguspunktist antud punkti tõmmatud vektorit . Raadiusvektor r määrab üheselt punkti asukoha ruumis. Vektoriks nim. sellest liiki suurust nagu nihe, s. o. suurus, mida iselo...
Elektrotehnika ja elektroonika 1. Elektrivälja potentsiaal, pinge, elektromotoorjõud. Elektrivälja punkti potentsiaal on mingisse punkti paigutatud positiivse ühiklaengu q potentsiaalne energia, mis tekib, sest ta võib hakata väljajõu mõjul liikuma, mille puhul see jõud teeb tööd. Pinge – elektrivälja kehe punkti vaheline pinge on suurus, mida mõõdetakse tööga, mis kulub positiivse ühiklaenug ühest punktist teise üleviimiskeks. U=A/q Elektromoroorjõud on mitteelektrivälja mööduks; toiteallika kogupinge. Elektromotoorjõud on töö, mida teevad vooluallikas toimivad kõrvaljõud ühikulise laengu (1 C) üleviimisel. Elektromotoorjõud on võrdne potentsiaalide vahega vooluallika klemmidel välise ahela puudumisel. 2. Elektrivool: ühik, suund, valem Elektrivool on elektrilaengute suunatud liikumine. Voolu suunaks loetakse positiivselt laetud aineosakeste suunda, ehk elektroonide liikumise vastassuunda. Üh...
Meresõidu omadused. 1.ujuvus Ujuvuseks nim laeva võimet seista vee peal ( ujuda) teatud asendis ja kanda endal ettenähtud lasti. Rahulikul (vaiksel) veel mõjuvad laevale tema enda raskusjõud ja temal paiknevate lastide rakusjõud. Nende jõudude ühisnäitaja P rakenduspunkt asub punktis G , mida nim raskuskeskmeks ( tähistatakse sümboliga G) See raskusjõud P on suunatud vertikaalselt allapoole Raskusjõud tasakaalustatakse vee rõhuga laevakerele ( või teisisõnu vee tõstejõududega). Nende ühisnäitaja (kolmnurgamärk) rakenduspunktis on punkt B , mida nim ujuvuskeskmeks või veeväljasurve keskmeks ( ka suuruskeskmeks) See jõud on suunatud vertikaalselt üles. Laev ujub tasakaalus , kus on täidetud tingimused P=(kolmnurgamärk) XG=XB ehk Xg=Xb ja Yg=Yb See tähendab , et iga veepinnalujuv laev kaalub nii palju kui palju kaalub tema poolt välja tõrjutud vesi Kui vesi ei ole mage ja omab teist erikaalu (tihedust) p kui magevesi siis (valem) Kolm...
1. Raudbetooni olemus. Betoon- ja raudbetoontala töötamise erinevus Raudbetoon on komposiitmaterjal, kus koos töötavad kaks väga erinevate omadustega materjali: teras ja betoon. Betoon on suhteliselt odav kohalik materjal, mis töötab hästi survel, kuid üsna halvasti tõmbel (betooni tõmbetugevus on 10-15 korda väiksem survetugevusest). Teras seevastu töötab ühteviisi hästi nii survel kui ka tõmbel, kuid tema hind on küllalt kõrge. Osutub, et survejõu vastuvõtmine betooniga on 3-4 korda odavam kui terasega, tõmbejõu vastuvõtmine on samavõrra odavam aga terasega. Siit tulenebki raudbetooni majanduslik olemus: võtta ühes ja samas konstruktsioonis esinevad survepinged vastu betooniga, tõmbepinged aga terasega. Betoontala koormamisel tekivad nulljoonega teineteisest eraldatud surve- ja tõmbetsoon. Suurimad normaalpinged on mõlemas tsoonis enam-vähem võrdsed. Kui väliskoormuse suurenedes tõmbepinged suurima paindemomendiga ristlõikes (kriitil...
1. Mis on geodeesia? Geodeesia on õpetus maa-alade mõõtmisest ja kaardistamisest, samuti maa kuju ja suuruse määramisest. Rakendusteadusena on geodeesia tähtsal kohal sõjanduses, katastrimõõdistamisel, metsanduses ja muus. 2. Nimeta geodeesia harud. Topograafia- maa-alade mõõdistamine ja kujutamine plaanil Kartograafia- tegeleb Maa, st kumera pinna kujutamisega tasapinnal Kõrgem geodeesia- tegeleb Maa kuju ja suuruse määramise ning plaanilise ja kõrgusliku põhivõrgu loomisega Aerofotogeodeesia- topograafiline mõõdistamine aerofotode järgi fotogramm- meetriliste instrumentide abil. Rakendusgeodeesia- käsitleb ehitiste (hooned, teed, sillad jne) rajamisel rakendatavaid mõõtmismeetodeid ja mõõteriistu. Üheks haruks on ehitusgeodeesia. 3. Nimeta põhilised geodeetilised instrumendid. Nivelliir on instrument, mis annab horisontaalse vaatekiire ning koos nivelleerimisla...
Eksamiküsimuse õppeaines ,,Soojustehnilised mõõtmised", õ-a 2006/2007 Mõõtmiste üldküsimused 1. Mõõtmise mõiste. Mõõtmise meetodid. Mõõtevahendid. Mõõteriist. Mõõteandurid ja mõõturid. Mõõteriistade klassifikatsioon. Mõõtmine on füüsikalise suuruse kvantitatiivne võrdlemine mõõteseadme poolt reprodutseeritava mõõtühikuga. Mõõtmine võib olla otsene või kaudne. Otsesel mõõtmisel määratakse mõõdetava suuruse arvväärtus just selle füüsikalise suuruse mõõtmiseks valmistatud mõõtevahendi abil, kaudsel arvutatakse otsitav suurus mõõdetud otseste suuruste järgi. Mõõtevahend, mis näitab mõõdetava suuruse väärtust, on mõõteriist. Mõõteriist võib olla otselugemmõõteriist, mille lugemisseadis esitab mõõtetulemuse mõõdetava suuruse ühikutes, või võrdlusmõõteriist, mis hangib mõõtetulemuse mõõdetava suuruse mõõtudega võrdlemise teel (nt lauakaal vihtide komplektiga). Mõõteandur tajub...
Eksamiküsimuse õppeaines ,,Soojustehnilised mõõtmised", Mõõtmiste üldküsimused 1. Mõõtmise mõiste. Mõõtmise meetodid. Mõõtevahendid. Mõõteriist. Mõõteandurid ja mõõturid. Mõõteriistade klassifikatsioon. Mõõtmine on füüsikalise suuruse kvantitatiivne võrdlemine mõõteseadme poolt reprodutseeritava mõõtühikuga. Mõõtmine võib olla otsene või kaudne. Otsesel mõõtmisel määratakse mõõdetava suuruse arvväärtus just selle füüsikalise suuruse mõõtmiseks valmistatud mõõtevahendi abil, kaudsel arvutatakse otsitav suurus mõõdetud otseste suuruste järgi. Mõõtevahend, mis näitab mõõdetava suuruse väärtust, on mõõteriist. Mõõteriist võib olla otselugemmõõteriist, mille lugemisseadis esitab mõõtetulemuse mõõdetava suuruse ühikutes, või võrdlusmõõteriist, mis hangib mõõtetulemuse mõõdetava suuruse mõõtudega võrdlemise teel (nt lauakaal vihtide komplektiga). Mõõteandur tajub oma tundliku elemendi...
Geodeesia II Tahhümeetriline mõõdistamine 1. Põhimõte Kontuurmõõdistamise tulemusena saadakse plaan, millel on kõik maastiku kontuurid ja objektid kujutatud topograafiliste leppemärkidega, kuid projekteerijal on tarvis saada ettekujutust ka maapinna reljeefist s.t. on tarvis määrata maapinna punktide kõrgused. Kõrguste saamiseks on kaks meetodit: trigonomeetriline nivelleerimine; geomeetriline nimelleerimine (kasutatakse horisontaalset vaatekiirt ja vertikaalseid mõõtelatte, mille abil määratakse punktide vahelised kõrguskasvud). Nivelleerimisega määratakse maapinna punktide kõrguste erinevused.ehk kõrguskasvud. Geomeetrilist nivelleerimist kasutatakse just tahhümeetrias kõrguskasv määratakse kauguse ja maapinna kaldunurga järgi. Tahhümeetria topograafilise mõõdistamise meetod, mille puhul määratakse korraga punkti plaaniline esend ja kõrgus. Topograafiline mõõdistamine tähendab tööde kompleksi, mille tu...
6 Vahelduvvool 6.1 Vahelduvvoolu mõiste Vahelduvvooluks nimetatakse voolu, mille suund ja tugevus ajas perioodiliselt muutub. Tänapäeva elektrijaotusvõrkudes on kasutusel vahelduvvool. Alalisvoolu kasutatakse seal, kus on vaja võrgust sõltumatut toiteallikat akut autol või taskutelefonis, toiteelementi käe- või seinakellas. Alalisvooluga töötab praegu veel enamus transpordivahendeid elektrirong, tramm, trollibuss. Elektrienergia saadakse nende jaoks aga vahelduvvooluvõrgust alaldusalajaamade kaudu. Alalisvooluga töötavad ka elektrokeemilised ja galvaanikaseadmed. Alalisvool, mida seni vaatlesime, on ajalooliselt varemtuntud ja lihtsam. Lihtsamad on ka teda kirjeldavad matemaatilised seosed. Paljud neist kehtivad ka vahelduvvoolu korral, palju on ka erinevusi. Vahelduvvoolu saamiseks enamkasutatav on siinuspinge, raadiotehnikas kasutatakse näiteks ka saehammaspinget. Käesolevas peatükis tuleb vaatluse ...
Kapten Rein Raudsalu MNI Loengud Eesti Mereakadeemias Teema 5. Koostatud 30.12..2001. Laevade ehitus. Täiendatud 23.11.2004. Laevade ehitus. Teema 5. Laeva ujuvus ja mereomadused. 5.1. Ujuvus. Ujuvuseks nimetatakse laeva võimet seista vee peal (ujuda) teatud asendis ja kanda endal ettenähtud lasti. Rahulikul (vaiksel) veel mõjuvad laevale tema enda raskusjõud ja temal paiknevate lastide raskusjõud. Nende jõudude ühisnäitaja P rakenduspunkt asub punktis G, mida nimetatakse raskuskeskmeks (RK). See raskusjõud P on suunatud vertikaalselt allapoole. (Vt. Joon. 5.1.) Joon. 5.1. Raskusjõud tasakaalustatakse vee rõhuga laevakerele (või teisisõnu vee tõste- jõududega). Nende ühisnäitaja ehk D rakenduspunktiks on punkt B, mida nimetatakse suuruskeskmeks (SK) või ve...
TALLINNA TEHNIKAÜLIKOOL Elektroenergeetika instituut ALAJAAMAD AEK3025 5,0 AP 6 4-1-1 E K (eeldusaine AES3045 "Elektrivõrgud") TALLINN 2008 Loengukursus AEK 3025 ii Rein Oidram _____________________________________________________________________ SISUKORD 1. Sissejuhatus 2. Alajaama struktuur ja side elektrivõrguga 2.1. Alajaama põhitüübid 2.2. Alajaamade talitlustingimused 2.3. Elektrijaamade sidumine elektrivõrguga. 3. Alajaama põhiseadmed 3.1. Trafo ja autotrafo 3.1.1. Trafode ja autotrafode kasutamine elektrisüsteemis 3.1.2. Trafo soojuslik talitlus 3.1.3. Trafo isolatsiooni kulumine ja koormusvõime 3.1.4. Trafole lubatavad ülekoormused 3.1.5. Elektrivõrgu neutraali ühendamine maaga 3.1.5.1. Isoleeritud neutraaliga elektrivõrk ...
Keskkonnakaitse õppetool Ressursside ebaefektiivne kasutus ja tulevased põlvkonnad Essee Tööstusökoloogia erialal Üliõpilane: Triin Rist Juhendaja: Tiina Niine Tartu, 2014 Erinevaid ressursse mida ebaefektiivselt tarvitatakse on palju, näiteks naftasaadused ja ka erinevad loodusvarad. Majanduslikult mõtleva inimese puhul, on tähtsaks see, et ise saaks kasu ning tahaplaanile jääb see, kas ja kui palju ressursse tulevastele põlvkondadele jääb. Majanduslikult mõtleva inimese jaoks on eelkõige tähtis ise kasu saada nind seeläbi rikastuda. Kuna praegune majandus on üles ehitatud tarbimisele, siis seeläbi ongi inimkonnale ette nähtud tarbida ebaefektiivselt. Eesmärgiks on tarbida võimalikult palju, kuna seeläbi majandus kasvab. Seega ei üldjoontes ei tahe...
Eesti oludes, kus pinnasevesi on sageli maapinna lähedal, on see probleem suurem peenteristel ja tolmliivadel. Kapillaarjõud on põhjuseks, miks niiske liiv ja hulgast, ka vedeliku viskoossusest. Filtratsioonimooduli suurus sõltub palju ka väga oluline. halvasti tiheneb võrreldes kuivaga. Kapillaarjõududest tingitud teradevahelised pinnaseosakeste mõõtmetest, pinnase poorsus ja vee temp. V ei ole võrdne Sissejuhatus - Geotehnika - ehitustehnika haru, mis tegeleb pinnasega sidemed kaovad niipea kui pinnas küllastub veega (sademed, pinnasevee tegeliku vee liikumise kiirusega pinnases. Kuna tegelik voolamine toimub läbi seotud ehitiste või nende üksikosade projekteerimise ja ehitamisega, see taseme tõus). Pinnaseosakesed võivad olla liidetud looduslike tsementidega, pooride, siis tegelik vooluk...
Füüsika osa koolieksamist 1. SI põhimõõtühikus ja nende teisendamine 1 31556925,9747 Aeg: Sekund (s) on ligikaudu troopilisest aastast 1900. aastal. 1 s võrdub 133 Cs aatomi teatud kahe energianivoo vahelisele üleminekule vastava kiirguse 9 192 631 770 perioodiga. 1 40000000 Pikkus: Meeter (m) on ligikaudu Pariisi läbiva Maa meridiaani pikkusest. 1 m 86 on võrdne Kr aatomi kiirguse oranži spektrijoone 1 650 763, 73 lainepikkusega. Meeter 1 299792458 võrdub kaugus...
I 1. Mis ja kui suur on kuuldelävi? Minimaalse intensiivsusega heli Imin, mis tekitab kuulmisaistingu kannab nime kuuldelävi. Viimase suurus on individuaalne ning sõltub väga tugevasti heli sagedusest. 2. Mis ja kui suur on vaevuslävi? Tekib kõrvus puutumis-, surve-, rõhumis-, vaevus-jne tunne, heli on otsekui muutunud liiga raskeks. See tähendab et heli intensiivsus on jõudnud normaalse kuulmise piirini, mina nim vaevusläveks. 3. Milline sagedusvahemik on parima kuulmise piirkond? Enam vähem 1-5 kHz. Sellest suurematel ja väiksematel sagedustel on kõrva tundlikkus väiksem ja kahaneb nii vanusega kui väga valjusid helisid kuulates. 4. Kuidas arvutatakse heli valjust? Leiame nii kuuldeläve kui valuläve logaritmilises skaalas, bellides ja detsibellides: kuuldelävi tavalises, lineaarses skaalas, kuuldelävi logaritmilises skaalas, Valulävi ...
Eksamiküsimused: 1. Kirjeldage kolme mitteparalleelse jõu tasakaalutingimusi Kuna jõud on libisev vektor, siis kanname jõud F1 ja F2 nende mõjusirgete lõikumise punkti. Tasakaaluaksioomi kohaselt on F12 ja F3 tasakaalus, kuinad on võrdvastupidised ja neil on sama mõjusirge. Viimane tingimus on täidetud, kui F1, F2 ja F3 mõjusirged lõikuvad ühes punktis. Jõuvektorid peavad moodustama kinnise jõukolmnurga kindla ümberkäigusuunaga. Järeldus: 1. Kolm mitteparalleelset jõudu on tasakaalus vaid siis, kui nende mõjusirged lõikuvad ühes punktis ja neist saab moodustada kinnise kolmnurga kindla ümberkäigusuunaga. 2. Jõudude kolmnurga saab moodustada vaid üksnes ühes tasapinnas asuvate jõudude vahel- seega need jõud tasakaalus olla ei saa. 2. Jõu sidemed ja nende süsteemid Tingimusi, mis kitsendavad keha liikumist, nimetatakse sidemeteks. Nad kitsendavad keha liikumisvabadust ja muudavad liikumist võrreldes sellega, mida nad sooritaksid samade jõ...
Hoonete soojussüsteemid. R.Randmann 1. Niiske õhk ja omadused 1.1 Omadused ja põhiparameetrid - Hapnik - Lämmastik - Argoon - CO2 Leitolt maha kirjutada. Niiske õhu absoluutne, tehniline niiskus ja suhteline niiskus. On omavahel seotud suurused st olenevad teineteisest. Avaldame veeauru tihetuse ja kuiva auru tiheduse iseaalse gaasi oleku põhjal. (valemid 4 ja 5 ) Asendades valemis 5 veeaurude patsiaal rõhu samale temp-ile p 0 a saame maxi tehnilise niiskuse arvutamiseks järgmise seose: (valem 6) pa 0 dmax = Järeldus: max niiskuse sisaldus sõltub parameetrilisest p - pa 0 rõhust ja õhu temp-ist. Sellepärast et pa 0 sõltub temp-ist ja samuti ka dmax Õhu temp-I suurenemisel dmax suureneb kusjuures niiske õhu kriitilisel temp-il mille puhul küllastus rõhk võrdub õhu...