Tallinna Tehnikaülikool Automaatjuhtimissüsteemid, ISS0021 Labor nr. 1 Antenni mudel Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed [X1]- antenni nurk [rad] '[X2] - antenni nurga muutumise kiirus J - kõikide keerlevate osade inertsmoment [kg*m2] J = 20
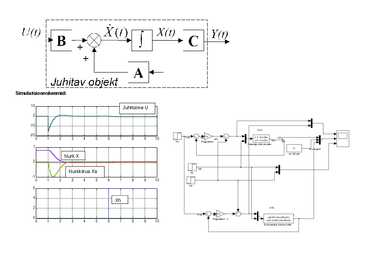
Tallinna Tehnikaülikool Automaatikainstituut Kodutöö 3 Pöördpendli mudel, järgimissüsteem Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed - pendli nurk [rad] 0.2 rad x käru asend M käru mass [kg] m pendli mass [kg] kaugus pendli raskuskeskmeni [m] g raskuskiirendus [m/s2] F liikumise jõud (mudeli sisend) B= G X0 A olekumaatriks, B sisendmaatriks, G häiringu ülekandemaatriks, X0 olekuvektor 2. Vormistatud eksperimendi lühiselgitus Eksperimendi eesmärk on tasakaalustada käru peal asetsevat pöördpendlit, samal ajal käru mingist asendist teise liigutades. Maksimaalne lubatud pendli kõrvalekalle ei tohi ületada 0,2rad; maksimaalne juhttoime 40V. Lubatud viga ei tohi ületada 5% Xs valitud seadesuurus, XS Seekord kasutatakse süsteemi juhtimise
Tallinna Tehnikaülikool Automaatjuhtimissüsteemid, ISS0021 Labor nr. 2 Pöördpendli modelleerimine ja juhtimine. Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed X0 = [-0.1; 0; 0; 0] - algolek Xs = [0; 0; 0,7; 0] seadesuurus X(t) - olek A = 0 1 0 0; 17.64 0 0 0; 0 0 0 1; -0.784 0 0 0 ] B = [0; -0.3333; 0; 0.2]
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut BORIS GORDON, EDUARD PETLENKOV ISS0010 SÜSTEEMITEOORIA ÜLESANNETE KOGU 2007 Parandatud 2009 Kaane kujundanud Ann Gornischeff Autoriõigus: B. Gordon, E. Petlenkov, 2007 ISBN 978-9985-59-688-3 2 EESSÕNA Käesolev ülesannete kogu on mõeldud kasutamiseks abimaterjalina õppeaines ISS0010 Süsteemiteooria. Kogu täiendab Hanno Sillamaa õpikut "Süsteemiteooria", millel on olnud juba neli trükki. Iga peatüki alguses on toodud viide selle õpiku (Hanno Sillamaa. Süsteemiteooria, TTÜ kirjastus) vastavatele teoreetilistele peatükkidele. Kui selles õpikus vastavat materjali ei ole, siis on antud viide teisele raamatule (K. Ogata. Modern control engineering, 2002). Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval- mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teoreetilise kursuse käigus
EESTI MEREAKADEEMIA RAKENDUSMEHAANIKA ÕPPETOOL MTA 5298 RAKENDUSMEHAANIKA LOENGUMATERJAL Koostanud: dotsent I. Penkov TALLINN 2010 EESSÕNA Selleks, et aru saada kuidas see või teine masin töötab, peab teadma millistest osadest see koosneb ning kuidas need osad mõjutavad teineteist. Selleks aga, et taolist masinat konstrueerida tuleb arvutada ka iga seesolevat detaili. Masinaelementide arvutusmeetodid põhinevad tugevusõpetuse printsiipides, kus vaadeldakse konstruktsioonide jäikust, tugevust ja stabiilsust. Tuuakse esile arvutamise põhihüpoteesid ning detailide deformatsioonide sõltuvuse väliskoormustest ja elastsusparameetritest. Detailide pinguse analüüs lubab optimeerida konstruktsiooni massi, mõõdu ja ökonoomsuse parameetrite kaudu. Masinate projekteerimisel omab suurt tähtsust detailide materjali õige valik. Masinaehitusel kasutatavate materjalide nomenklatuur täieneb pidevalt, rakendatakse efekti
3 ELEKTRIAJAMITE ELEKTROONSED SÜSTEEMID 4 Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene Toimetanud Evi-Õie Pless Kaane kujundanud Ann Gornischeff Käesoleva raamatu koostamist ja kirjastamist on toetanud SA Innove Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Ehitajate tee 5, Tallinn 19086 Telefon 620 3700 Faks 620 3701 http://www.ene.ttu.ee/elektriajamid/ Autoriõigus: Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene TTÜ elektriajamite ja jõuelektroonika instituut, 2008 ISBN ............................ Kirjastaja: TTÜ elektriajamite ja jõuelektroonika instituut 3 Sisukord Tähised............................................................................................................................5 Sümbolid .....................
V.Jaaniso Pinnasemehaanika 1. SISSEJUHATUS Kõik ehitised on ühel või teisel viisil seotud pinnasega. Need kas toetuvad pinnasele vundamendi kaudu, toetavad pinnast (tugiseinad), on rajatud pinnasesse (süvendid, tunnelid) või ehitatud pinnasest (tammid, paisud) (joonis 1.1). a) b) c) d) J o o n is 1 .1 P in n a s e g a s e o tu d e h i tis e d v õ i n e n d e o s a d .a ) p i n n a s e le t o e t u v a d ( m a d a l - j a v a iv u n d a m e n t) b ) p i n n a s t t o e t a v a d ( t u g is e in a d ) c ) p in n a s e s s e r a j a tu d ( tu n n e li d , s ü v e n d i d d ) p in n a s e s t r a j a tu d ( ta m m i d , p a is u d ) Ehitiste koormuste ja muude mõjurite tõttu pinnase pingeseisund muutub, pinnas deformeerub ja võib puruneda nagu kõik teisedki materjalid. See põhjustab
Veljed ja rehvid Auto on liiklusvahend, paljudele tööriist, mõnele hobi või lõbusõiduk. Meie ühiskonnas ka tihti imago tõstmise vahend. Ilmselt seetõttu on ta muutunud tihti ka omaniku mänguasjaks, mida ehitatakse, nühitakse ja ümber ehitatakse - tuunitakse. Auto välimust mõjutavad märkimisväärselt tema rattad. Auto ratas ei ole nii lihtne ja iseenesest mõistetav, nagu ta pealtnäha võib paista. Kui me tahame teada, kas velg sobib teatud autole, peame teadma velje läbimõõtu, laiust, nihutust (offset), poldiringi läbimõõtu, tsentriava läbimõõtu ja kinnituspoltide arvu. Poldiringi läbimõõdu mõõtmine. Vasakul nelja, kuue ja kaheksa poldiga, paremal viie poldiga velje puhul. Nihutus (offset) on velje keskjoone ja kinnitustasandi vaheline kaugus. Tavaliselt on kinnitustasand velje välisservale lähemal - sel juhul on tegu sissenihutusega (inset); kui aga kinnitustasand on velje välisservast kaugemal, on tegu vä



















Kõik kommentaarid