TTÜ EESTI MEREAKADEEMIA Laevanduskeskus Laevamehaanika lektoraat MEREPRAKTIKA ARUANNE Praktika algus: Kadett: Andrei Lichman Praktika lõpp: Rühm: MM42 Praktika koht: m/v Transdistinto Juhendaja: Jaan Läheb Tallinn 2016 2 3 SISUKORD 1.1. Üldandmed laeva kohta ................................................................................................... 6 1.2 Üldandmed laeva jõuseadme kohta .................................................................................. 7 1.2.1 Jõuseadmete tüüp ......................................................................................
12. Laeva peamõõtmed ja täidlustegurid. Laeva pikkus - L. Lmax - maksimaalne pikkus, vööri ja ahtri äärmiste punktide vahekaugus. Lgab - suurim pikkus arvestades väljaulatuvaid osi. L - pikkus mööda KVL, teoreetiline pikkus laevakere paksust atvestamata. LLL (ka LPP) - loodide (perpendikulaaride) vaheline pikkus, (ka arvestuslik pikkus), vöörilood - vertikaaljoon, mis läbib KVL ja vöörtäävi ahtripoolset serva, ahtrilood läbib sama ahtertäävil, kuis sagedamini läbib rooli pöörlemistelge, kusjuures pole arvestatud täävide ja välispladistuse paksust. Laius B B - teoreetiline või arvutuslik laius KVL tasapinnas (või laeva kõige laiemas kohas) laevakere paksust arvestamata s.o. laevakere plaadistuse sisepinnalt. Bmax - maksimaalne laius Bgab - maksimaalne laius koos väljaulatuvate osadega. Süvis T T - KVL kaugus kiilujoonest ehk alustasandist, Tv - vööri süvis, Ta - ahtri süvis, TM - keskmine süvis ehk süvis miidlil,
12. Laeva peamõõtmed ja täidlustegurid. Laeva pikkus - L. Lmax - maksimaalne pikkus, vööri ja ahtri äärmiste punktide vahekaugus. Lgab - suurim pikkus arvestades väljaulatuvaid osi. L - pikkus mööda KVL, teoreetiline pikkus laevakere paksust atvestamata. LLL (ka LPP) - loodide (perpendikulaaride) vaheline pikkus, (ka arvestuslik pikkus), vöörilood - vertikaaljoon, mis läbib KVL ja vöörtäävi ahtripoolset serva, ahtrilood läbib sama ahtertäävil, kuis sagedamini läbib rooli pöörlemistelge, kusjuures pole arvestatud täävide ja välispladistuse paksust. Laius B B - teoreetiline või arvutuslik laius KVL tasapinnas (või laeva kõige laiemas kohas) laevakere paksust arvestamata s.o. laevakere plaadistuse sisepinnalt. Bmax - maksimaalne laius Bgab - maksimaalne laius koos väljaulatuvate osadega. Süvis T T - KVL kaugus kiilujoonest ehk alustasandist, Tv - vööri süvis, Ta - ahtri süvis, TM - keskmine süvis ehk süvis miidlil,
EESTI MEREAKADEEMIA Laevamehaanika kateeder MEREPRAKTIKA ARUANNE Õppeliin: laeva jõuseadmed Õpperühm: MM41 Praktikant: Pjotr Muhhin Juhendaja: Jaan Läheb Praktika algus:02.05.2010 Praktika lõpp: 06.09.2010 Praktikakoht: M/S Ice Runner TALLINN 2010 Retsensioonid 2 Sisukord 1. Üldandmed laeva ja laeva seadmete kohta .................................4 1.1. Üldandmed laeva kohta ...........................................................4 1.2. Üldandmed laeva jõuseadmete kohta ......................................8 2. Laeva peamasin ........................................................................
12. Laeva peamõõtmed ja täidlustegurid. Laeva pikkus - L. Lmax - maksimaalne pikkus, vööri ja ahtri äärmiste punktide vahekaugus. Lgab - suurim pikkus arvestades väljaulatuvaid osi. L - pikkus mööda KVL, teoreetiline pikkus laevakere paksust atvestamata. LLL (ka LPP) - loodide (perpendikulaaride) vaheline pikkus, (ka arvestuslik pikkus), vöörilood - vertikaaljoon, mis läbib KVL ja vöörtäävi ahtripoolset serva, ahtrilood läbib sama ahtertäävil, kuis sagedamini läbib rooli pöörlemistelge, kusjuures pole arvestatud täävide ja välispladistuse paksust. Laius B B - teoreetiline või arvutuslik laius KVL tasapinnas (või laeva kõige laiemas kohas) laevakere paksust arvestamata s.o. laevakere plaadistuse sisepinnalt. Bmax - maksimaalne laius Bgab - maksimaalne laius koos väljaulatuvate osadega. Süvis T T - KVL kaugus kiilujoonest ehk alustasandist, Tv - vööri süvis, Ta - ahtri süvis, TM - keskmine süvis ehk süvis miidlil,
1. 4- ja 2-taktilise diiselmootori ringprotsessid, Kuna sisselaskeklapp (klapid) avaneb enne ÜSS-u , toimub Ülelaadimiseta (sundlaadimiseta ) mootorite täiteaste avaldub arvutuslik ja tegelik indikaatordiagramm. põlemiskambri läbipuhe ( nn. klappide ülekate ). valemiga SPM ringprotsesside arvestus. v = / ( - 1)* Pa / P0 * T0/Ta * 1/ (r+1) Erinevalt teoreetilistest ringprotsessidest saadakse tegelikus 2-TAKTILISE MOOTORI TEGELIK Kui mootor on ülelaadimisega (sundlaadimisega ),siis parameetrite sisepõlemismootoris soojust kütuse põletamisel kolvipealses INDIKAATORDIAGRAMM P0 ja T0 asemele pannakse ülelaadimise õhu pa
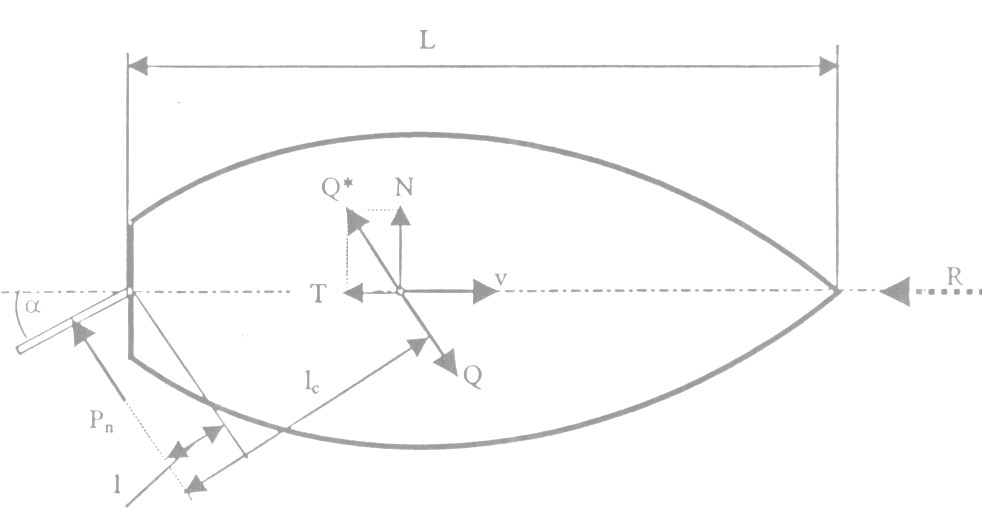
lainete pealejooksu perioodi. Suurimad ohud on seotud ahtri "kaasahaaramisega" laine poolt, millele järgneb juhitavuse kaotus, laeva pööramine põiki lainet selle esiküljel ja laineharja langemine laevale, mis viimase ümber lükkab (inglise keeles broaching-to). See nähtus tekkib siis kui laine pikkus on suurem laeva pikkusest ja tema jooksukiirus peaaegu sama laeva enda kiirusega. Laeva kannab mõnda aega laineharjal lainega kaasa. Veest peaaegu välja ulatuv rool koos sõukruviga ei saa hakkama laeva liikumise suuna kontrolli all hoidmisega. Kui laev vajub laine esiküljele, ahter tõuseb veest välja ja lainehari samal ajal murdub, langedes ahtrile, haaratakse kogu laev murduva lainega kaasa (laev hakkab surfama). Vöör tungib lainepõhjas sügavale vette ning pidurdub, juhitamatu ahter aga haaratakse murduva laineharjaga kaasa. Laev pööratakse pardaga laine poole ja saab tugeva kreeni. Kui nüüd lainehari lõplikult
pööratakse traktorite juhtrattaid füüsilise jõuga. Juhi töö kergendamiseks lisatakse mehhaanilisele rooliseadmele roolivõimendi. Siis nimetatakse seda hüdromehhaaniliseks rooliseadmeks. Kasutatakse ka hüdraulilisi rooliseadmeid, kus rattaid pööratakse jõusilindri(te) abil. Roolivõimendi või hüdraulilise rooliseadme tööle panekuks on traktorile paigaldatud eraldi hüdrosüsteem. Selle hüdrosüsteemi jaoturi siibri asendit juhitakse rooli pööramisega. Hüdromehaanilise rooliseadme korral juhitakse jaoturit otse rooliga ja hüdraulilise rooliseadme korral juhitakse jaoturit dosaatorpumbaga, mille võlli pööratakse rooliga. Hüdrosüsteemis pannakse õli liikuma hammasratas või rootorpumbaga, mis saab jõuülekande mootori väntvõllilt või vaheülekande võllilt. Süsteemi kaitseks on hüdrosüsteemis kaitseklapp, mis rakendub ülerõhu korral. Rooliseadme töötamise

































Kõik kommentaarid