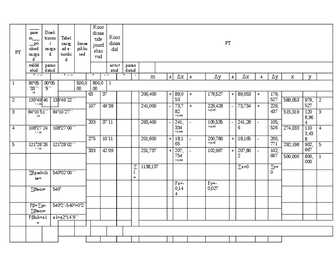
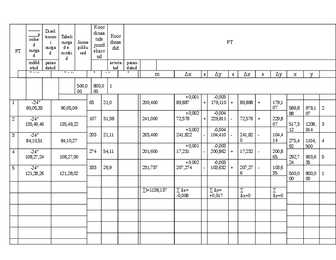
____ Koor pare Direk dinaa m___ tsioon Tabel tide Koor __po i inurg Joone juurd dinaa PT olsed nurga ad e. pikku did PT ekas nurga d rumbi sed vud d d
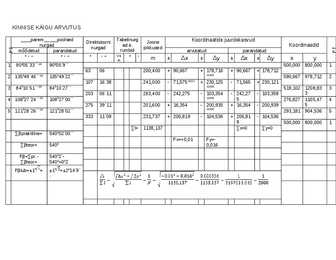
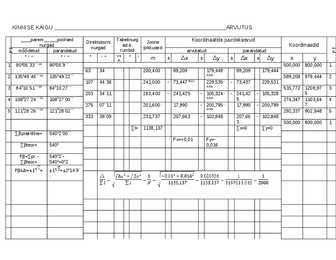
KINNISE KÄIGU ARVUTUS ____parem_____poolsed Tabelinurg Koordinaatide juurdekasvud Direktsiooni Joone nurgad nurgad ad e. pikkused Koordinaadid PT PT mõõdetud parandatud rumbid arvutatud parandatud
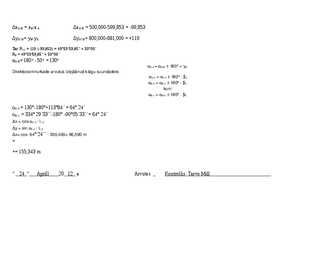
l=1138,137 x= y= -0,008 +0,017 x=0 y=0 KINNISE KÄIGU 1-2-3-4-5-1 ARVUTUS " 30 " detsember 2011. a Arvutas: Kristo Nõmm . Kontrollis: . Yb=113°2100" 1-2= a-b±180°+ Yb =63°21' fs/=fx +fy2/l=1/N=0,018788294/ 2 pr=1+2 +3 +4 +5=540°200" 2-3= 1-2±180° - 2=107°31'38" /1138,137=1/605771/2000 teor =180°(n-2)=180°(5-2)=540°000" 3-4= 2-3±180° - 3=203°21'11"
KINNISE KÄIGU ARVUTUS ____parem_____poolsed Tabelinurg Koordinaatide juurdekasvud Direktsiooni Joone nurgad nurgad ad e. pikkused








Kõik kommentaarid