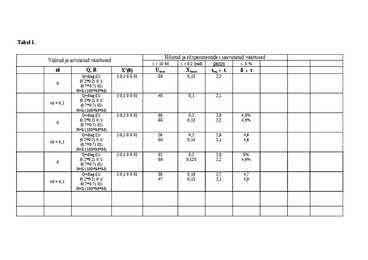
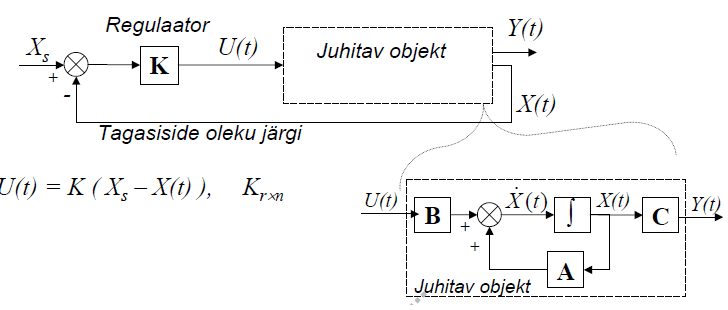
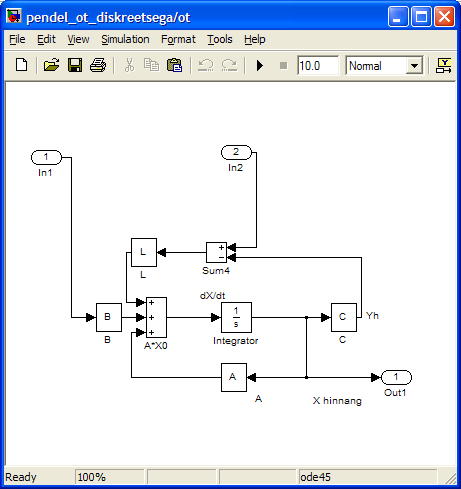
Tallinna Tehnikaülikool Automaatikainstituut Kodutöö 3 Pöördpendli mudel, järgimissüsteem Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed - pendli nurk [rad] 0.2 rad x käru asend M käru mass [kg] m pendli mass [kg] kaugus pendli raskuskeskmeni [m] g raskuskiirendus [m/s2] F liikumise jõud (mudeli sisend) B= G X0 A olekumaatriks, B sisendmaatriks, G häiringu ülekandemaatriks, X0 olekuvektor 2. Vormistatud eksperimendi lühiselgitus Eksperimendi eesmärk on tasakaalustada käru peal asetsevat pöördpendlit, samal ajal käru mingist asendist teise liigutades. Maksimaalne lubatud pendli kõrvalekalle ei tohi ületada 0,2rad; maksimaalne juhttoime 40V. Lubatud viga ei tohi ületada 5% Xs valitud seadesuurus, XS Seekord kasutatakse süsteemi juhtimise
Tallinna Tehnikaülikool Automaatjuhtimissüsteemid, ISS0021 Labor nr. 1 Antenni mudel Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed [X1]- antenni nurk [rad] '[X2] - antenni nurga muutumise kiirus J - kõikide keerlevate osade inertsmoment [kg*m2] J = 20 Bs - igasuguste sumbumiste summaarne koefitsient [kg*m2/s] Bs = 16 M - mootori poolt arendatav moment [kg*m2/s2], M = k*U(t) Md - tuule häiringu moment [kg*m2/s2] e olekuhäiring Xh U(t) - mootori sisendpinge [V] A = 0 1.0000 - olekumaatriks 0 -0.4000 B=0 - sisendmaatriks 0.1945 C - väljundmaatriks D - otsesidemaatriks G - häiringu ülekande maatriks G=0 0.0250 2.
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut ANTENNI ASENDI (NURGA) JUHTIMINE KODUNE TÖÖ NR 1 aines "Automaatjuhtimissüsteemid" Miko Allikmäe 061643IASB IASB51 Juhendaja:Eduard Petlenkov Esitatud: 26.10.2008 Kaitstud:
Praktikum II Pöördpendel liikuval alusel ja süsteemi stabiliseerimine tagasisidega 1.Pöördpendli lihtsustatud mudel (vt demoks nt https://youtu.be/bENXhqIPkBs ) m l x F M Olekumudeli muutujad ja parameetrid: - pendli nurk [rad] x aluskäru asend [m] M aluskäru mass [kg] m pendli varda mass [kg] l - kaugus pendli varda raskuskeskmeni [m] g - raskuskiirendus [m/s2] F jõud aluskäru liigutamiseks [N] (mudeli sisend u) Olekumudel (olekuvõrrandi maatriksid) ja olekumuutujate vektor X x1 - nurk X& = A X + B U & x - nurga tuletis e nurkkiirus
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut BORIS GORDON, EDUARD PETLENKOV ISS0010 SÜSTEEMITEOORIA ÜLESANNETE KOGU 2007 Parandatud 2009 Kaane kujundanud Ann Gornischeff Autoriõigus: B. Gordon, E. Petlenkov, 2007 ISBN 978-9985-59-688-3 2 EESSÕNA Käesolev ülesannete kogu on mõeldud kasutamiseks abimaterjalina õppeaines ISS0010 Süsteemiteooria. Kogu täiendab Hanno Sillamaa õpikut "Süsteemiteooria", millel on olnud juba neli trükki. Iga peatüki alguses on toodud viide selle õpiku (Hanno Sillamaa. Süsteemiteooria, TTÜ kirjastus) vastavatele teoreetilistele peatükkidele. Kui selles õpikus vastavat materjali ei ole, siis on antud viide teisele raamatule (K. Ogata. Modern control engineering, 2002). Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval- mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teoreetilise kursuse käigus
...........................................................................................................19 2.1. Stone-Weierstrassi teoreem ....................................................................................19 2.2. Kolmogorovi teoreem ............................................................................................22 3. Mitmekihiline pertseptron ja vea tagasilevi meetod ..........................................................24 4. Modelleerimine tehisnärvivõrkudega ................................................................................28 5. Juhtimine tehisnärvivõrkudega ..........................................................................................30 5.1. Ennustamisega juhtimine .......................................................................................30 5.2. Närvivõrgu õpetamine regulaatori realiseerimiseks ...............................................31 5.3
...........................................................................................................19 2.1. Stone-Weierstrassi teoreem ....................................................................................19 2.2. Kolmogorovi teoreem ............................................................................................22 3. Mitmekihiline pertseptron ja vea tagasilevi meetod ..........................................................24 4. Modelleerimine tehisnärvivõrkudega ................................................................................28 5. Juhtimine tehisnärvivõrkudega ..........................................................................................30 5.1. Ennustamisega juhtimine .......................................................................................30 5.2. Närvivõrgu õpetamine regulaatori realiseerimiseks ...............................................31 5.3
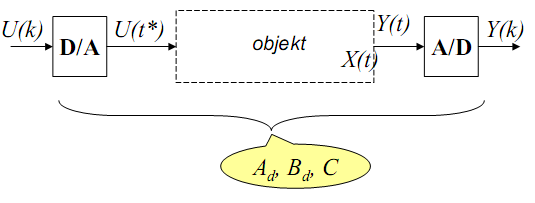
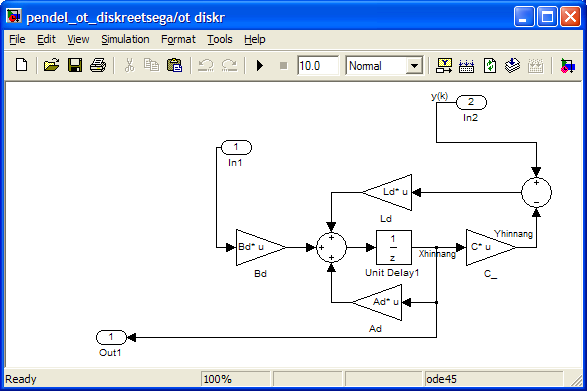
kasutatakse juba kodumasinates, üha harvemini puutume kokku tööpinkidega, kuhu mikroprotsessorid pole veel jõudnud. Digitaal- ja mikroprotsessortehnika areng jätkub peadpööritava kiirusega. Vaevalt leidub teist tehnikaala, kus seadmete töökiirus ja efektiivsus, hind ja mõõtmed muutuksid mõne aasta jooksul 10 ja enam korda. Mikroprotsessorist on saanud inseneride käes universaalne vahend paljude probleemide lahendamiseks. Energia- ja tööstusseadmete juhtimine, kontrolli-, mõõte-, bürootehnika jms on vaid väike loetelu aladest, kus tänapäeval mikroprotsessoriteta läbi ei saada. Kooselu arvutitega on muutnud meie arusaamu ja mõttemalle. Pidevatoimeliste protsesside juhtimiseks kasutatakse üha enam diskreetseid juhtseadmeid, sest nii paraneb süsteemi tundlikkus, täpsus ning töökindlus. Signaalide kvantimine ja kodeerimine võimaldab rakendada numbrilise infotöötluse meetodeid ja programmjuhtimise põhimõtteid ning




















![X0 = [-0.1; 0; 0; 0] - algolek](./mpic/110356/Backup-2_1.png)




Kõik kommentaarid