1.Lineaarse
võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad ,
vabaliikmed, lahend . Süsteemi maatriks ja laiendatud maatriks.Lineaarse
võrrandi all
mõistetakse võrrandit kujul
, (1)
kus
ja
b
on fikseeritud arvud ning
on
tundmatud.
Arvu
b
nimetatakse vaadeldava võrrandi
vabaliikmeks,
arve
aga tema
kordajateks.
Def.
1. Võrrandi (1)
lahendiks
nimetatakse selliseid tundmatute
väärtusi ,
et pärast nende paigutamist võrrandi (1) vasakusse poolde
tundmatute asemele kehtiks võrdus
Võrrandi
(1) lahend on
n
arvust
koosnev järjestatud lõplik jada. Seega saab teda vaadelda
aritmeetilise vektorina
kus
Mõnikord on
sobiv paigutada arvud
veergu ja vaadelda lahendit kui üheveerulist maatriksit
. (2)
Lahendi (2)
korral öeldakse ka, et arvud
rahuldavad
võrrandit (1).
Def.
2.
Lineaarseks
võrrandisüsteemiks
nimetatakse lõplikust arvust lineaarseist võrrandeist
koosnevat süsteemi. Tema üldkuju on
(3)
Arve
nimetatakse võrrandisüsteemi (3)
kordajateks,
arve
aga süsteemi (3)
vabaliikmeteks.
Def.
3. Arve ,
mis rahuldavad süsteemi (3) kõiki võrrandeid, nimetatakse
võrrandisüsteemi (3)
lahendiks.
Ka süsteemi
(3) lahendit vaadeldakse aritmeetilise vektorina ,
aga teda
kirjutatakse ka kujul (2).
Def.
4. Lineaarse võrrandisüsteemi (3) kordajatest moodustatud
maatriksit
nimetatakse
süsteemi (3) maatriksiks .
Maatriksi
A
täiendamisel vabaliikmete veeruga tekkinud maatriksit
nimetatakse
süsteemi (3)
laiendatud maatriksiks.
2.Substitutsiooni
definitsioon, näide. Inversiooni definitsioon, näide. N-järku
determinandi definitsioon.Determinandi
defineerimisel kasutatakse substitutsiooni mõistet.
Def.
1.
n-ndat
järku substitutsiooniks nimetatakse
n
esimese naturaalarvu 1, 2, ... ,
n
iga ümberjärjestust .
Näide
1. Kolmandat järku substitutsioone on 6:
1,
2, 3; 1, 3, 2; 2, 1, 3; 2, 3, 1; 3, 1, 2; 3, 2, 1.
Võib
veenduda (meie seda siin ei tee), et
n-ndat
järku substitutsioone on
tükki.
Kõigi
n-ndat
järku substitutsioonide hulka tähistatakse .
Def.
2. Olgu substitutsioonist
valitud kaks arvu
ja
selles järjekorras, nagu nad seal seisavad, s.t.
ehk .
Kui ,
siis öeldakse, et paar
moodustab
inversiooni
vaadeldavas
substitutsioonis.
Näide
2.
Neljandat järku substitutsioonis 4, 1, 3, 2 saab vaadelda paare
4,
1; 4, 3; 4, 2; 1, 3; 1, 2; 3, 2.
Nendest moodustavad inversiooni ainult paarid
4,
1; 4, 3; 4, 2; 3, 2.
Tähistagu
kõigi
inversioonide arvu substitutsioonis .
Näide
3. .
Determinantide
teeoria käsitlusel on vajalikud mõned substitutsioonide omadused,
mis on seotud inversioonide arvuga.
Seostame
iga substitutsiooniga
maatriksi
Vahetades
maatriksi
M
veerge nii, et selle teise rea arvud oleksid kasvavas järjekorras,
saadakse maatriks
mille
esimeseks
reaks on omakorda substitutsioon .
Kui paar
moodustab inversiooni substitutsioonis ,
siis
ja seetõttu paar
l,
k
moodustab inversiooni substitutsioonis .
Nii tekib üksühene vastavus substitutsioonide
ja
inversioone moodustavate paaride vahel. Seega kehtib
Lemma
1. Kui
on
n-ndat
järku substitutsioon ja substitutsioon
on saadud substitutsioonist
äsja kirjeldatud viisil, siis
Näide
4.
Vaatleme näites 2
esinevat neljandat järku substitutsiooni 4, 1,
3, 2. Siin
ja
esialgse substitutsiooniga 4, 1, 3, 2
seostatakse substitutsioon 2,
4, 3, 1. Maatriksi
M
veergude järjekorda muutes tekitab substitutsiooni 4, 1, 3, 2
inversiooni moodustav paar 4, 3 inversiooni moodustava paari 3, 1
substitutsioonis 2, 4, 3, 1 ehk sümboolselt
Nii
tekitatakse substitutsiooni 2, 4, 3, 1 iga inversiooni moodustav paar
substitutsiooni 4, 1, 3, 2 mingi inversiooni moodustava paari poolt:
ja
Lemma
2. Iga substitutsiooni
korral
(1)
ehk
, (2)
kus
on hulga
kõigi kaheelemendiliste hulkade hulk.
Tõestus.
Vaatleme korrutist
. (3)
Selles
korrutises esinevad lugejas teguritena kõikvõimalikud vahed ,
kus
ja .
Korrutise (3)
nimetajas esinevad iga
ja
jaoks aga tegurid kujul .
Siin märk ““ tekib vaid juhul, kui paar t, s moodustab inversiooni
substitutsioonis .
Seega tekib korrutisest (3) pärast taandamisi korrutis, kus
teguritena esinevad arvud 1 ja –1 teatav arv
kordi . Seejuures
ülalöeldu põhjal on arvu –1
tegurina esinemiste arv võrdne
inversioonide arvuga substitutsioonis .
Siit järeldubki võrdus (1). Kuna
siis
võrdus (2) järeldub vahetult võrdusest (1).
Näide
5. Näidetes 2 ja 4 vaadeldud substitutsiooni 4, 1, 3, 2 korral
Esitame
tõestuseta järgmise lemma.
Lemma
3. Kui substitutsioon
on saadud substitutsioonist
kahe arvu (näiteks
ja )
asukoha vahetamisel, siis
. (4)
3.Determinantide
10 omadust.Vaatleme
ruutmaatriksi
determinanti
Esitame
tõestuseta omadused 1 ja 2.
Omadus
1.
Maatriksite A ja
determinantide väärtused langevad kokku, s.t. determinandi
D
väärtus ei muutu, kui tema read paigutada vastavateks veergudeks ja
vastupidi:
See omadus
ütleb, et determinandi iga ridade puhul kehtiva omaduse jaoks saab
sõnastada analoogse omaduse veergude jaoks.
Omadus
2. Kui determinandil
vahetada omavahel kaks rida (või veergu), siis saadud determinandi
väärtus on
–D (
determinant muudab märki).
Selle
omaduse tõestuses kasutatakse lemmat 3 (§ 1).
Omadus
3. Kui determinandis
kaks rida (või veergu) langevad omavahel kokku, siis selle
determinandi väärtus võrdub nulliga.
Tõestus.
Langegu determinandis
D
kaks rida omavahel kokku. Nende ridade vahetamisel ühelt poolt
determinandi
D
väärtus ei muutu,
teiselt poolt aga omaduse 2 põhjal muutub tema
märk vastupidiseks. Seega ,
ja .
Omadused 4
ja 5 järelduvad summa märgi omadustest.
Omadus
4. Determinandi mis
tahes rea (või
veeru ) arvudest võib ühise teguri tuua tegurina
determinandi märgi ette.
Omadus
5. Kui determinandi
D
mingi rea, näiteks
k-nda
rea arvud
avalduvad
kahe liidetava summana
siis
determinant
D
avaldub kahe determinandi summana:
Analoogne väide kehtib determinandi
D
veergude jaoks.
Omadus
6. Determinandi väärtus ei muutu, kui tema mingi rea arvudele liita
mingi arvu
kordsed teise rea arvud.
Analoogne
väide kehtib determinandi veergude jaoks.
Tõestus.
Olgu
determinandi
D
reavektorid. Tähistagu
determinanti, mis on saadud determinandist
D
tema
k-nda
rea arvudele arvu
c
kordsete
l-nda
rea arvude liitmisel. Siis
eelmiste omaduste põhjal
omadus
5
omadus 4
omadus 3 .
Järgmise
omaduse saamiseks fikseerime determinandis
D
mingi rea, näiteks
k-nda
rea
ja vaatleme
determinandi definitsioonis antud
summat (1)
Selles
summas on
liidetavat. Valime
summast (1) välja liidetavad, milles on tegurina
k-nda
rea esimene element ,
s.t. liidetavad, mis vastavad substitutsioonidele ,
kus .
Kuna selliseid substitutsioone on
tükki, siis on summas (1)
liidetavat, mis sisaldavad tegurina k-nda rea esimest elementi .
Võttes nendest liidetavatest ühise teguri
sulgude ette ja tähistades sulgudesse jäävate arvude summat ,
on tegurina elementi
sisaldavate
liidetavate summa avaldises (1) avaldatav kujul .
Analoogselt on
k-nda
rea järgmist elementi
sisaldavate liidetavate arv
ja nende liidetavate summa on avaldatav kujul .
Nii saadakse
k-nda
rea iga elemendi jaoks
liidetavat summast (1). Need liidetavad on erinevad ja nende arv on
.
Seega peab saadud liidetavate summa võrduma
summaga (1) ehk
. (2)
Def.
Summat (2) nimetatakse determinandi
D
arendiks k-nda
rea järgi. Arvu
nimetatakse determinandi
D
elemendi
alamdeterminandiks
ehk
algebraliseks
täiendiks.
Leiame
nüüd eeskirja alamdeterminantide
väärtuste leidmiseks. Alamdeterminantide moodustamise eeskirjast
tuleneb, et alamdeterminantide
avaldistes
liidetava summana ei esine determinandi
D
k-nda
rea elemente .
Tähistagu
determinandist
D
tema
i-nda
rea ja
j-nda
veeru kõrvaldamisel tekkivat-st
järku determinanti.
Lemma
1. .
Tõestus.
Elementi
sisaldavad liidetavad summas (1) on kujuga
Seega
Tähistame
Ilmselt
Seetõttu
Lemma
2. .
Tõestus.
Valime determinandist
D
välja
i-nda
rea ja
j-nda
veeru elemendi .
Viime
i-nda
rea determinandi esimeseks reaks, jättes ülejäänud ridade
järjekorra muutmata. Selleks tuleb vahetada
i-nda
rea
asukohtaeelneva
reaga . Saadud determinandi
j-nda
veeru viime tema esimeseks veeruks. Selleks tuleb vahetada
j-nda
veeru asukohta
eelneva veeruga. Tekkinud determinandi
esimese rea ja esimese veeru
elemendiks on :
Omaduse 2
põhjal
. (2)
Determinandi
i-nda
rea ja
j-nda
veeru elemendile vastavat alamdeterminanti tähistame .
Rakendades lemmat 1 determinandile ,
saame
, (3)
kus
on determinant, mis tekib determinandist
D
i-nda
rea ja
j-nda
veeru kõrvaldamisel.
Võttes
determinandi
arendise esimese rea järgi ja determinandi
D
arendise
i-nda
rea järgi, saadakse võrdusest (2)
(4)
Kuna
alamdeterminantide
ja
arvutuseeskirjades ei esine determinandi
D
i-nda rea elemente
,
siis kehtib võrdus (4) mis tahes arvude
korral. Valides
ja ,
kui ,
siis saadakse ,
kust võrduse (3) põhjal .
Saadud võrdusest saadakse arvuga
korrutades lemma väide.
Sõnastame
nüüd tõestatud lemma 2 ja valemi (2)
järgmise omadusena.
Omadus
7. (
Determinandi
arendis rea või veeru järgi)
Determinandi
D
mis tahes reanumbri
i
korral kehtib
(arendis
i-nda
rea järgi) ja mis tahes veerunumbri
j korral kehtib
(arendis
j-nda
veeru järgi), kus
ja
on determinant, mis tekib determinandist
D
i-nda
rea ja
j-nda
veeru kõrvaldamisel.
Omadus
8. Kui determinandi mingis reas või
veerus on kõik arvud nullid,
siis determinandi väärtus võrdub nulliga.
See omadus
järeldub eelmisest omadusest, kui vaadelda determinandi arendit
selle rea või veeru järgi, kus on kõik arvud nullid.
Omadus
9. Ruutmaatriksi
determinandi
mis tahes reanumbrite
i
ja
k
korral kehtib võrdus
(5)
kus
on determinandi elemendi
alamdeterminant. Analoogselt mis tahes veerunumbrite
j
ja
k
korral
(6)
Tõestus.
Fikseerime determinandis
D
kaks reanumbrit
i
ja
k.
Kui ,
siis võrdus (5) kehtib omaduse 7 põhjal. Seepärast eeldame, et .
Tähistagu
determinanti, mis tekib determinandist
D
tema
k-nda
rea arvude asendamisel
i-nda
rea
arvudega .
Arendades determinandi
tema
k-nda
rea järgi, saame:
Omaduse
3 põhjal ,
sest determinandi
i-s
rida ja
k-s
rida langevad kokku. Siit järeldub võrdus (5) juhul .
Analoogselt tõestatakse valem (6).
Omadus
10. Kui
A
ja
B
on ühte ja sama järku ruutmaatriksid, siis
4.Pöördmaatriksi
definitsioon ja elementide leidmise eeskiri . Regulaarse ja
singulaarse maatriksi mõisted.Def.
1. Maatriksi
A
pöördmaatriksiks
nimetatakse sellist maatriksit
B,
mille korral
, (1)
kus
E
on
sobivat järku ühikmaatriks.
Võrdustes
(1) on
korrutamine võimalik, kui
A
on ruutmaatriks. Seega pöördmaatriks võib leiduda ainult
ruutmaatriksil.
Teoreem
1. Maariksi
A
pöördmaatriks, juhul, kui ta eksisteerib, on üheselt määratud.
Tõestus.
Olgu
ja
maatriksi
A
pöördmaatriksid. Siis
ja
s.t.
ning teoreemi väide kehtib.
Maatriksi
A
pöördmaatriksit tähistatakse .
Seega
Osutub, et
mitte kõik ruutmaatriksid ei oma pöördmaatriksit.
Teoreem
2. Ruutmaatriksil
leidub pöördmaatriks
parajasti siis, kui tema determinant ei võrdu
nulliga. Kui ,
siis
, (2)
kus
on maatriksi
A
determinandi
elemendi
alamdeterminant.
Tõestus.
Oletame, et maatriksil
A
leidub
pöördmaatriks. Siis
ning omaduse 10 (VI peatükk § 3) põhjal
Siit
järeldubki, et .
Vastupidi,
eeldame, et .
Moodustame maatriksi
ja
veendume determinantide teooria valemeid kasutades, et :
Analoogselt
tõestatakse võrdus .
Ongi näidatud, et .
Sellega on teoreem tõestatud.
Def.
2. Ruutmaatriksit
A,
mille determinant ei võrdu nulliga, nimetatakse
regulaarseks.
Vastandjuhul nimetatakse ruutmaatriksit
A
singulaarseks.
Teoreemi 2
kohaselt leidub pöördmaatriks ainult regulaarsetel
ruutmaatriksitel.
5.Skalaarkorrutise
definitsioon vektorruumis . Vektori pikkuse definitsioon. Vektorite
vahelise nurga definitsioon. Vektorite ristseisu tunnus.Afiinses ruumis
pole võimalik arvutada nn. meetrilisi suurusi: vektori pikkust,
punktide vahelist kaugust, vektorite vahelist nurka jne. Meetriliste
suuruste sissetoomiseks kasutatakse skalaarkorrutise mõistet, mille
üldine definitsioon on järgmine.
Def.
1.
Skalaarkorrutiseks
vektorruumis
V
nimetatakse reeglit, mis igale kahele vektorile paneb vastavusse
parajasti ühe
reaalarvu , mida tähistatakse
ja nimetatakse
vektorite
ja
skalaarkorrutiseks,
kusjuures on täidetud järgmised tingimused:
1°
iga
korral;
2°
parajasti siis, kui
(
nullvektor )
3°
iga
korral (kommutatiivsus);
4°
iga
ja
korral (homogeensus);
5° ,
iga
korral (distributiivsus).
Näide
1.
Aritmeetilises vektorruumis
vaadeldakse tavaliselt II peatükis § 2 määratud skalaarkorrutist:
. (1)
Selliselt defineeritud korrutise jaoks on täidetud definitsioonis 1 esitatud
nõuded .
Näide
2. Igas lõplikumõõtmelises vektorruumis on võimalik defineerida
skalaarkorrutis . Selleks tuleb fikseerida ruumis mingi baas
ja defineerida
vektorite
ja
skalaarkorrutis
analoogselt
reegliga (1):
Kui
V
ei ole nullruum, siis on vektorruumis
V
lõpmata palju baase ja seega ka erinevaid skalaarkorrutisi.
Def.
2.
Vektorruumi V
koos temas fikseeritud skalaarkorrutisega nimetatakse
eukleidiliseks
vektorruumiks.
Eukleidilises
vektorruumis võrdub nulliga iga vektori
skalaarkorrutis nullvektoriga :
. (2)
Järgnevalt
olgu
V
mis tahes eukleidiline vektorruum. Defineerime skalaarkorrutise abil
vektori pikkuse ja vektoritevahelise nurga.
Def.
1. Vektori
pikkuseks
nimetatakse arvu .
Vektori
pikkust tähistatakse .
Seega
ehk .
Skalaarkorrutise
aksioomi
põhjal on igal vektoril pikkus ja see on üheselt määratud.
Aksioomist
järeldub, et
parajasti siis, kui
on nullvektor.
Teoreem.
Mis tahes arvu
c
ja kahe vektori
ja
korral eukleidilisest vektorruumist
V
kehtivad järgmised omadused:
, (1)
, (2)
. (3)
Tõestus.
Kuna ,
siis
ja võrdus (1)
kehtib.
Tõestame
nüüd võrratuse (2). Kui
või ,
siis võrratus (2) kehtib. Seepärast eeldame, et
ja .
Valime suvalise reaalarvu
x
ja moodustame vektori .
Aksioomi
põhjal ,
s.t.
. (4)
Avame
skalaarkorrutise aksioome kasutades sulud:
(5)
Kuna
,
siis on võrratus (5) ruutvõrratus. Võrratus (5) kehtib iga
reaalarvu
x
korral, mistõttu peab tema vasakul pool esineva ruutkolmliikme
diskriminant
D
rahuldama võrratust :
(6)
Teisendame seda
võrratust:
kust järeldubki
võrratus (2).
Võrratuse (3)
näitamiseks arvutame
(kasutati
võrratust (2)). Siit saabki pärast juurimist võrratuse (3).
Def.
2. Olgu
ja
nullvektorist erinevad
vektorid eukleidilisest vektorruumist
V.
Vektorite
ja
vaheliseks nurgaks
nimetatakse nurka .
mis on määratud võrdusega
. (7)
Kui
ja ,
siis võrduse (7) paremal pool esineva murru väärtust saab leida
ning Cauchy-Bunjakovski võrratuse põhjal ei ületa selle
absoluutväärtus arvu 1.Seega saab vaadeldav
murd olla mingi nurga
koosinuseks. Koosinusfunktsiooni omaduste tõttu pole nurk
üheselt määratud. Võib nõuda, et .
Siis on nurk üheselt määratud.
Vektorid
on risti, kui nendevaheline nurk on .
Kuna ,
siis peab sel korral skalaarkorrutis
võrduma nulliga.
Def.
2. Öeldakse, et vektorid
ja
on omavahel
risti
ehk
ortogonaalsed
ja tähistatakse ,
kui .
6.Vektorkorrutise
definitsioon. Teoreem vektorkorrutise ristseisust ja pikkusest
(tõestuseta). Segakorrutise definitsioon.Vaatleme
kolmemõõtmelises eukleidilises ruumis vektoreid
mis on antud
koordinaatidega
xyz-teljestikus.
Def.
1. Vektorite
ja
vektorkorrutiseks
nimetatakse
vektorit ,
mis on määratud võrdusega
. (1)
Tähistades
koordinaattelgede suunalisi ühikvektoreid vastavalt ,
ja ,
on avaldis (1) esitatav kujul
(2)
(sest kasutati
viimase kolmandat järku determinandi arendist esimese rea järgi).
Võrdust (2) on sobiv kasutada vektorkorrutise arvutamiseks.
Vektor - ja
skalaarkorrutise abil on esitatav kolmandat järku determinandi
arvutamise eeskiri. Determinandi
mille
reavektorid on
väärtuse
arvutamiseks arendame selle determinandi kolmanda rea järgi ja
kasutame seejärel vektor- ja skalaarkorrutise definitsiooni:
ehk
. (3)
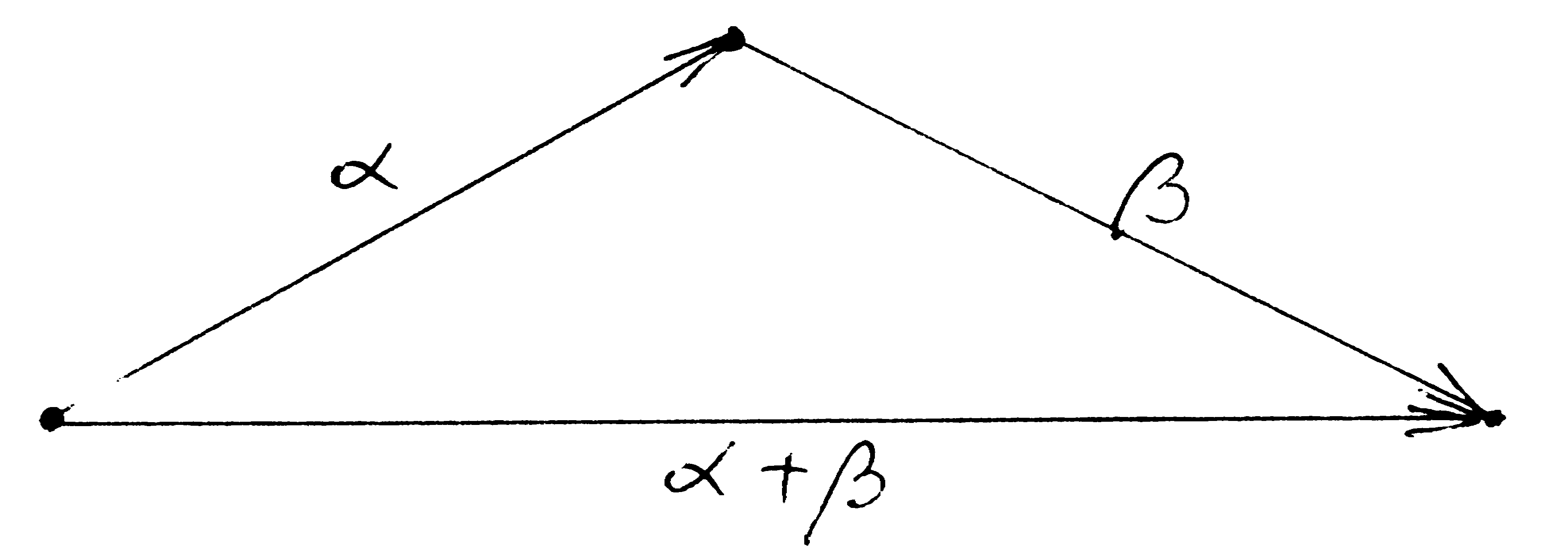
Teoreem.
Vektorkorrutison risti mõlema
tegurigaja .
Vektorkorrutise
pikkus
on arvuliselt võrdne vektoritele
ja
ehitatud rööpküliku pindalaga.
Tõestus.
Vaatleme vektorite
ja
vektorkorrutist .
Võrduse (3) kohaselt
(selle
determinandi väärtus võrdub nulliga, sest ta sisaldab kaks
võrdsete elementidega rida). Seega
saime , et .
See aga tähendab, et vektorid
ja
on risti. Analoogselt põhjendatakse vektorite
ja
ristseis.
Teoreemi teise
väite tõestuseks kasutame kolmandat järku determinandi
geomeetrilist tähendust:
kus
V
on vektoritele ,
,
ehitatud rööptahuka ruumala ning
on vektorite
ja
vaheline nurk. Selle rööptahuka kõrgus
h
on aga (vt.
eelmist joonist ja arvestada, et vektor
on paralleelne vektoriga ).
Seega .
Siit järeldub, et arv
võrdub vaadeldava rööptahuka põhja pindalaga. See on samaväärne
teoreemi teise väitega.
Järeldus.
Vektorkorrutis
võrdub nullvektoriga parajasti siis, kui vektorid
ja
on kollineaarsed.
Ütleme
tõestuseta, et vektorid ,
ja
moodustavad nn.
parema käe kolmiku
(vektori
suunda saab määrata ka nn.
kruvireegliga).
Eeltoodu
põhjal saab vektorkorrutisele anda teise definitsiooni:
Def.
2. Vektorite
ja
vektorkorrutiseks
nimetatakse vektorit ,
mis on risti vektoritega
ja ,
mille pikkus ühtib vektoritele
ja
ehitatud rööpküliku pindalaga ning mille suund on antud
kruvireegliga.
Selles
definitsioonis pole vaja teada vektorite
ja
koordinaate. Ühtlasi näitab see, et definitsiooniga 2 määratud
vektor
ei sõltu teljestiku valikust vaadeldavas kolmemõõtmelises
eukleidilises ruumis.
Def.
3. Kolmemõõtmelise eukleidilise ruumi vektorite ,
ja
segakorrutiseks
nimetatakse vektorite
ja
vektorkorrutise
skalaarkorrutist vektoriga ,
s.t. arvu .
Paragrahvis 2
toodud teoreemi ja võrduse (3) tõttu on vektorite ,
ja
segakorrutise absoluutväärtus võrdne nendele vektoritele ehitatud
rööptahuka ruumalaga. Valem (3) annab eeskirja segakorrutise
arvutamiseks.
Peale
rööptahuka ruumala arvutamise võib segakorrutist kasutada ka kahe
mitteparalleelse sirge vahelise kauguse arvutamiseks kolmemõõtmelises
eukleidilises ruumis
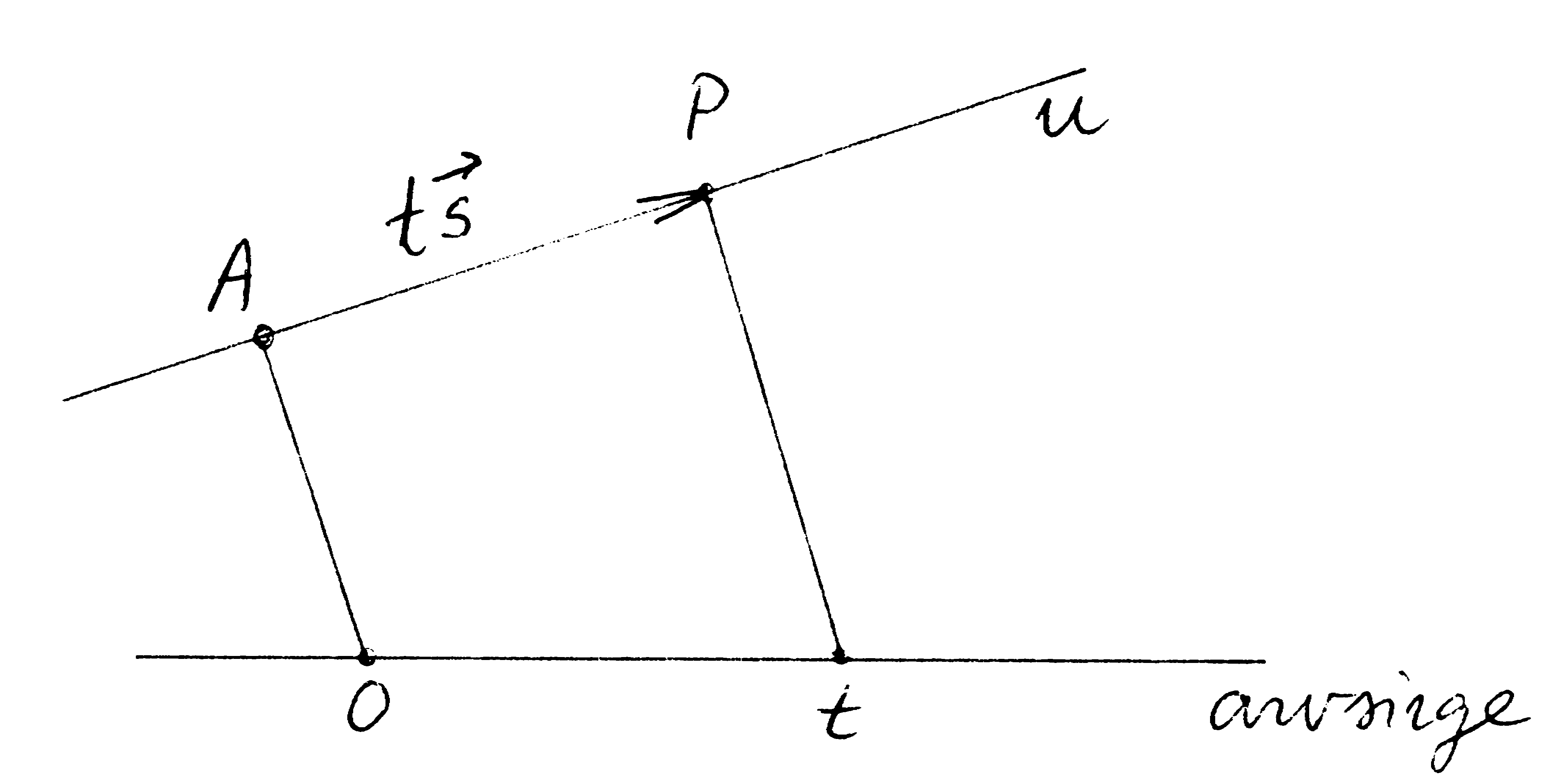
7.Sirge
parameetrilised ja kanoonilised võrrandid. Kolmemõõtmelise ruumi
tasandi võrrand, tasandi normaalvektor.Defineerime
sirge mõiste mis tahes afiinses ruumis nii, et et erijuhuna saaksime
sirge, mida
tunneme kooligeomeetriast. Selleks vaatleme mis tahes
sirget
u
tasandil.
Sirge
u
on üheselt määratud
temal asuva
punktiga A
ja mingi nullvektorist
erineva vektoriga ,
mis on paralleelne sirgega
u
.
Sirge
u
koosneb parajasti
sellistest punktidest
P,
mille korral vektor
on paralleelne vektoriga :
Vektorite
ja
paralleelsus on aga samaväärne nõudega, et vektor
on vektori
kordne ehk leidub selline ,
et .
Seega on sirge
u
järgmine punktide hulk:
mingi
korral. (1)
Sirge
selles esituses ei ole ruumi mõõdet
n.
See võimaldab üldistada sirge mõiste mis tahes afiinsele ruumile
(ka ruumi eukleidilisus pole vajalik).
Olgu
A
= (
V;
P)
afiinne ruum.
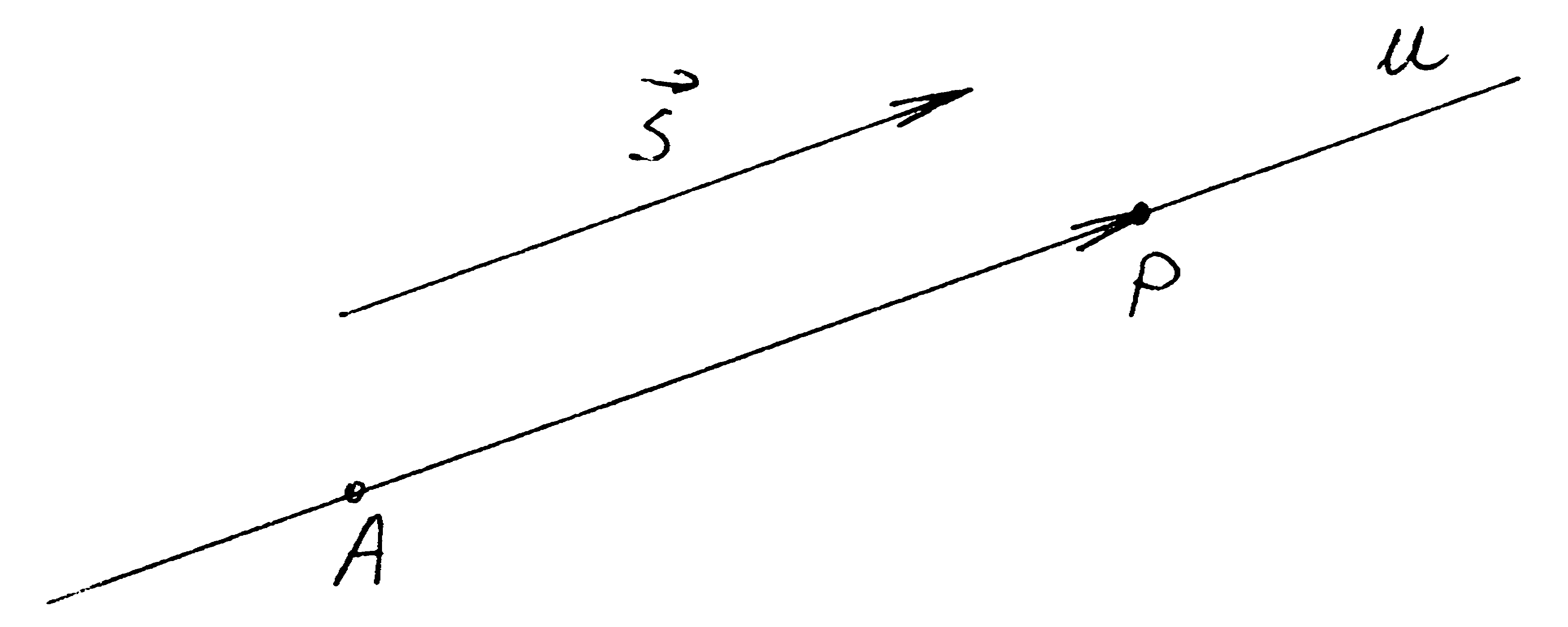
Def.
1. Olgu
P
ja .
Sirgeks läbi punkti
A
ja sihivektoriganimetatakse kõigi selliste punktide
P
hulka
u,
mille korral
mingi
korral:
P,
mingi
korral. (2)
Võttes selles
võrduses ,
näeme, et ka punkt
A
ise asub sirgel u .
Iga reaalarvu
t
korral leidub afiinse ruumi aksioomi
põhjal parajasti üks punkt
P
nii, et .
Seega tekib üksühene vastavus kõigi
reaalarvude hulga ja sirge
u
punktide vahel: arvule
t
vastab punkt P
sirgelt u,
kus .
Esitame
tõestuseta järgmise teoreemi.
Teoreem.
Iga kahe erinava punkti
A
ja
B
korral afiinsest ruumist leidub parajasti üks sirge
u,
millel need punktid asuvad (s.t.
ja ).
Def.
2. Olgu
U
mingi punktide hulk afiinsest ruumist
A
(
UP).
Punktide hulga
U
võrranditeks
nimetatakse
n
tundmatut
sisaldavat võrrandisüsteemi, mida rahuldavad parajasti tundmatute
sellised väärtused, mis on mingi hulka
U
kuuluva punkti
P koordinaatideks (ehk võrrandisüsteem, mille lahendite hulgaks on
U).
Erijuhul võib
võrrandisüsteem koosneda ainult ühest võrrandist. Siis räägitakse
vaadeldava punktide hulga võrrandist.
Olgu
u
punkti
A
läbiv sirge sihivektoriga
ning
Vaadeldava
n-mõõtmelise
afiinse ruumi mis tahes punkt olgu
Siis
ja punkt
P
kuulub sirgele
u
parajasti siis, kui leidub selline ,
et ,
s.t.
ehk
(3)
Avaldisi (3)
nimetatakse vaadeldava sirge
u
parameetrilisteks
võrranditeks. Arvu
t
avaldistes (3) nimetatakse
parameetriks.
Sirge
u
parameetrilisi võrrandeid (3) tuleb mõista järgnevalt: kui
parameetrit
t
muuta üle reaalarvude hulga, siis punkt
P
koordinaatidega
muutub üle sirge
u.
Järelikult iga
korral saadakse avaldistes (3) sirge
u
punkt
ja sirge
u
iga punkti
korral leidub selline ,
et punkti
P
koordinaadid avalduvad kujul (3).
Elimineerides
võrdustest (3) parameetri
t,
saadakse
(4)
(neid murde
tuleb vaadelda suhtena). Võrdustesse (4) on ühendatud mitu erinevat
võrrandit ja neid nimetatakse vaadeldava sirge
kanoonilisteks
võrranditeks.
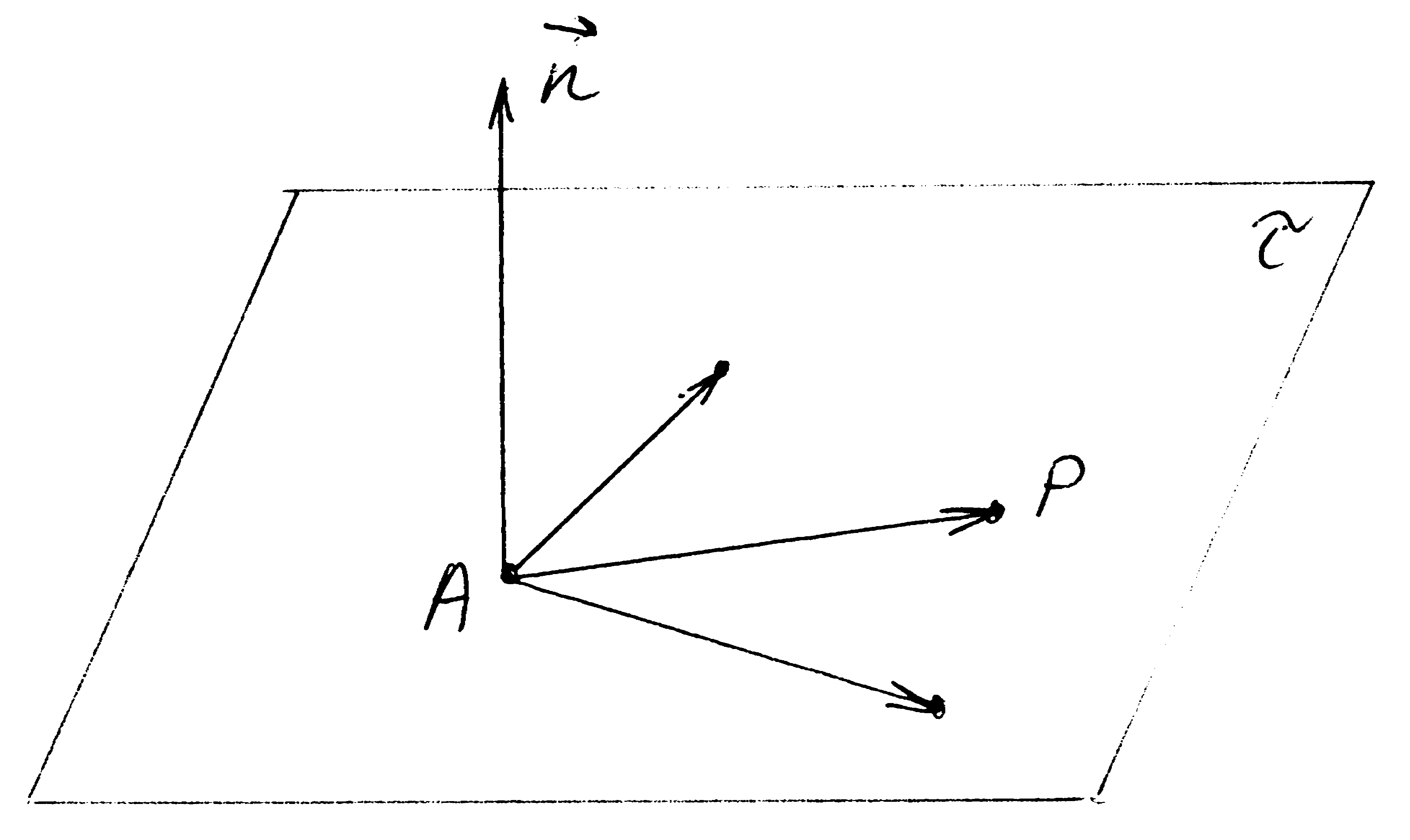
Kolmemõõtmelises
eukleidilises ruumis on hüpertasandiks (2) punkti
A
läbiv ja vektoriga
risti olev tasand.
Tähistades
sel korral
ja muutes arvude
ning
b
tähistusi, saadakse tasandi võrrandiks kolmemõõtmelises
eukleidilises ruumis
. (3)
Kordajad
a,
b,
c
võrrandis (3) ei tohi võrduda samaaegselt nulliga ning nendest
moodustatud vektor
on risti selle tasandiga. Vektorit
nimetatakse vaadeldava tasandi
normaalvektoriks.
Üldiselt:
Def.
3. Vektorit nimetatakse
hüpertasandi (1)
normaalvektoriks.
Võrdusest
(2) järeldub, et iga kahe punkti
P
ja
Q
korral hüpertasandil
on vektor
risti hüpertasandi
normaalvektoriga .































Kõik kommentaarid