1.Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Süsteemi maatriks ja laiendatud maatriks. Lineaarse võrrandi all mõistetakse võrrandit kujul a1 x1 + a2 x2 + ... + an xn = b , (1) kus a1 , a2 , ... , an ja b on fikseeritud arvud ning x1 , x2 , ... , xn on tundmatud. Arvu b nimetatakse vaadeldava võrrandi vabaliikmeks, arve a1 , a2 , ... , an aga tema kordajateks. Def. 1. Võrrandi (1) lahendiks nimetatakse selliseid tundmatute x1 , x2 , ... , xn väärtusi c1 , c2 , ... , cn R , et pärast nende paigutamist võrrandi (1) vasakusse poolde tundmatute asemele kehtiks võrdus a1c1 + a2c2 + ... + ancn = b . Võrrandi (1) lahend on n arvust c1 , c2 , ... , cn koosnev järjestatud lõplik jada. Seega saab teda vaadelda aritmeetilise vektorina
1. Kompleksarv kui reaalarvude paar. Tehted kompleksarvudega. Tehete omadused. Kompleksarvu algebraline kuju. Tuletatavad tehted ja nende omadused. Kompleksarvuks nimetatakse reaalarvude paari (x,y). C = {(x;y) | x, y R} Tehted kompleksarvudega: z1 = (x1; y1) C; z2 = (x2; y2) C 1. liitmine: z1 + z2 = (x1 + x2; y1 + y2) 2. korrutamine: z1 * z2 = (x1x2 - y1y2; x1y2 + x2y1) Kompleksarvudega tehete omadused 1. liitmine on kommutatiivne, st z1 + z2 = z2 + z1 z1, z2 C korral 2. liitmine on assotsiatiivne, st (z1 + z2) + z3 = z1 + (z2 + z3) z1, z2, z3 C korral 3. liitmise suhtes leidub nullelement (reaalarv 0, 0 + z = z + 0 = z z C korral), st leidub C, nii et z + = + z = z z korral; = (0; 0) = 0 4. igal kompleksarvul z = (x; y) = x + yi leidub (liitmise suhtes) vastandarv, st selline arv w C, et z + w = w + z = 0; w = -z 5. korrutamine on kommutatiivne, st z1z2 = z2z1 z1, z2 C korral 6. korrutamine on assotsiatiivne, st (z1z2)z3 = z1(z2z3) z1, z2, z3 C korral
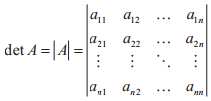
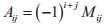
Kõrgema matemaatika kordamisküsimused 1. Maatriksi definitsioon. Maatriksi elemendid. Lineaarsed tehted maatriksitega (liitmine ja skalaariga korrutamine). Nullmaatriks. Transponeeritud maatriks 2. Maatriksite korrutise definitsioon. Korrutamise omadused ja seosed lineaarsete tehete ning korrutamise vahel. Ühikmaatriks. 3. Teist ja kolmandat järku determinandid. 4. Permutatsiooni definitsioon. Inversiooni definitsioon. n-järku determinandi definitsioon. Determinandi põhiomadused 5. Maatriksi elemendi minor. Alamdeterminant. Determinandi arendus rea ja veeru järgi. Determinantide teooria põhivalem. 6. Regulaarse maatriksi mõiste. Pöördmaatriksi definitsioon ja elementide leidmise eeskiri. Pöördmaatriksi omadused. 7. Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Vasturääkiv, kooskõlaline, määratu süsteem. Süsteemi maatriks ja laiendatud maatriks. 8. Süsteemi lahen
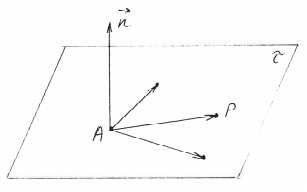
1 VEKTORALGEBRA PÕHIMÕISTEID DEFINITSIOON. Suurusi, mis on iseloomustatud oma 1) arvväärtuse (pikkuse), 2) sihi ja 3) suunaga, nimetatakse vektoriteks. Tähistame neid a, b,... . MÄRKUS. Geomeetriliselt on vektor a määratud kahe punktiga oma alguspunktiga A ja lõpp-punktiga B. Tähistame a = AB, kusjuures: 1) arvväärtuse määrab punktide vaheline kaugus, 2) sihi määrab punktidega antud sirge s(A,B), 3) suund on määratud punktide järjestusega. OLULISED VEKTORID: Vektoreid, mille arvväärtus (pikkus) on üks, nimetatakse ühikvektori- = 1. teks. Kasutatakse tähistust e, st e Vektoreid, mille arvväärtus (pikkus) on null, nimetatakse nullvektoriteks. Kasutatakse tähistust 0. Nullvektori siht ja suund on määramata. VEKTORITE VASTASTIKUSED SEOSED: Vektorid a ja b on võrdsed (a
1 VEKTORALGEBRA PÕHIMÕISTEID DEFINITSIOON. Suurusi, mis on iseloomustatud oma 1) arvväärtuse (pikkuse), 2) sihi ja 3) suunaga, nimetatakse vektoriteks. Tähistame neid a, b,... . MÄRKUS. Geomeetriliselt on vektor a määratud kahe punktiga oma alguspunktiga A ja lõpp-punktiga B. Tähistame a = AB, kusjuures: 1) arvväärtuse määrab punktide vaheline kaugus, 2) sihi määrab punktidega antud sirge s(A,B), 3) suund on määratud punktide järjestusega. OLULISED VEKTORID: Vektoreid, mille arvväärtus (pikkus) on üks, nimetatakse ühikvektori- = 1. teks. Kasutatakse tähistust e, st e Vektoreid, mille arvväärtus (pikkus) on null, nimetatakse nullvektoriteks. Kasutatakse tähistust 0. Nullvektori siht ja suund on määramata. VEKTORITE VASTASTIKUSED SEOSED: Vektorid a ja b on võrdsed (a
KORDAMISKÜSIMUSED 2015/2016 Kõrgem matemaatika MTMM. 00.145 (6EAP) 1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega. Kui aij on reaalarvud ning i = 1; 2;...;m ja j = 1; 2;...; n, siis tabelit: nimetatakse täpsemalt (m x n)-maatriksiks ja kasutatakse tähistusi Am x n või Amn. Arvupaari (m; n) nimetatakse maatriksi A mõõtmeteks. Tabelis paiknevaid arve aij nimetatakse maatriksi elementideks. i reaindeks; j veeruindeks. reamaatriks (1 x n); veerumaatriks (m x 1); ruutmaatriks m = n Tähistused: maatriksi järk naturaalarvude paar m x n (ridade ja veergude arv). ruutmaatriksi korral järk n (n = ridade arv = veergude arv). maatriksi liigid: nullmaatriks kõik elemendid 0. tähistus teeta ruutmaatriks rida
1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega: Maatriksi järk tähistab maatriksi mõõtmeid: A on m*n järku maatriks. Liigid: · Ruutmaatriks (m=n) · Diagonaalmaatriks ruutmaatriks, mille peadiagonaalis arvud, muud elemendid 0-d. · Ühikmaatriks diagonaalmaatriksi erijuht. Peadiagonaali elemendid 1-d. Täh E. · Nullmaatriks kõik nullid. Täh . 2. Tehted maatriksitega (korrutamine arvuga, liitmine, lahutamine, korrutamine). · Korrutamine arvuga: korrutades maatriksit reaalarvuga, muutuvad kõik elemendid, selle arvu korra suuremaks. · Maatriksite liitmine: mõõtmed peavad olema samad. Ühemaatriksi elemendid liidetakse teise maatriksi vastavate elementidega: A = (a ij) ja B = (bij) A+B =(cij) kus cij = aij + bij. ·
Crameri teoreem lineaarsete võrrandisüsteemide lahendamiseks See teoreem kehtib meelevaldsete lineaarsete võrrandisüsteemide lahendamiseks, kus võrrandite ja tundmatute arvud on võrdsed. Lisaks peavad võrrandisüsteemid olema korrastatud. Kui lineaarse võrrandisüsteemi maatriksi determinant on nullist erinev, siis avalduvad tundmatud murdudena, mille nimetajaks on süsteemi maatriksi determinant ja mille lugejad on maatriksi, mis saadakse süsteemi maatriksist vastava tunmatu kordajate veeru asendamisel vabaliikmete veeruga, determinandid. Kui maatriks täidab Crameri teoreemi eeldusi, siis öeldakse, et tegemist on Crameri peajuhtumiga. Seega Crameri peajuhtumil 1) m=n, 2) |A| 0. Tähendab, Crameri peajuhul on lineaarsel võrrandisüsteemil üksainus lahend, mis avaldub valemitega x1=|A1|/|A| x2=|A2|/|A| .. xn=|An|/|A| Determinantide omadused, determinandi arendus rea (veeru) järgi Omadus 1. Transponeerimisel (ridade ja veergude ringivahetami
























Kõik kommentaarid