Contents 1.Kordse integraali mõiste. Kahekordne intgeraal. Kahekordse integraali omadused...............1 2.Regulaarsed ja normaalsed piirkonnad. Kaksikintegraal. Kahekordse integraali arvutamine kaksikintegraali abi..................................................................................................................... 1 3.Muutujavahetus kordses integraalis. Jakobiaan. Polaarkoordinaadid.....................................2 4.Kolmekordne integraal ja selle arvutamine rist-, silinder- ja sfäärkoordinaatides..................3 5.Teist liiki joonintegraal ja Greeni valem.................................................................................4 6.Diferentsiaalvõrrandi mõiste...................................................................................................5 7.Cauchy ülesanne ehk algväärtusülesanne................................................................................ 5 8.Eksaktne diferentsiaal...
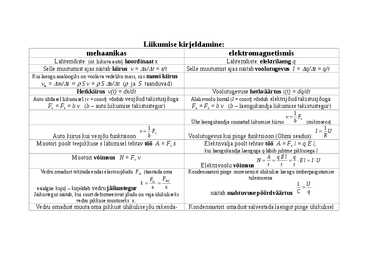
Liikumise kirjeldamine: mehaanikas elektromagnetismis Lähtemõiste: (nt. liikuva auto) koordinaat x Lähtemõiste: elektrilaeng q Selle muutumist ajas näitab kiirus v = x/t = s/t Selle muutumist ajas näitab voolutugevus I = q/t = q/t Kui laengu analoogiks on voolava vedeliku mass, siis massi kiirus vm = m/t = S v = S x/t ( ja S taanduvad) Hetkkiirus v(t) = dx/dt Voolutugevuse hetkväärtus i(t) = dq/dt Auto ühtlasel liikumisel (v = const) võrdub veojõud takistusjõuga: Alalisvoolu korral (I = const) võrdub elektrijõud takistusjõuga: Fv = Ft = b v (b auto liikumise takistustegur) Fe = Ft = b v (b laengukandja liikumise takistustegur) ...
Vektorruum Mittetühja hulka V nimetatakse vektorruumiks üle reaalarvude hulga R, kui sellel hulgal on defineeritud lineaarsed tehted: hulga V elementide liitmine ja korrutamine skalaaridega nii, et on täidetud järgmised tingimused: hulk V on kinnine elementide liitmise suhtes ja hulk V on kinnine skalaariga korrutamise suhtes Vektorruumi 1) leidub nullelement omadused 2) iga elemendi a korral leidub tema vastandelement a 3) (a+b)+c=a+(b+c) 4) a+b=b+a 5) k(a+b)=ka+kb 6) (k+l)a=ka+la 7) (kl)a=k(la) 8) 1a=a Vektorruumi Vektorruumi alamruumiks nimetatakse vektorruumi V mittetühja alamhulka U, alamruum kui U on vektorruumi V tehete suhtes vektorruum üle ...
1.Kordse integraali mõiste. Kahemuutuja funktsiooni integraalsumma ja kahekordse integraali definitsioonid. Kahekordse integraali geomeetriline sisu. Kahekordse integraali omadused. Kui eksisteerib , mis ei sõltu osapiirkondadeks Dj jaotamise viisist ega punktide Pj ϵ Dj valikust, siis seda piirväärtust nimetatakse funktsiooni f(x,y) kahekordseks integraaliks üle piirkonna D ja tähistatakse Olgu D kinnine tõkestatud piirkond ruumis R2. Olgu z = ƒ (x,y) piirkonnas D määratud pidev funktsioon. Jaotame piirkonna D n tükiks ∆S1,∆S2,…,∆Sn.Tähistagu ∆Si samaaegselt nii i- ndat tükki kui ka i-nda tüki pindala.Valime igalt tükilt ühe punkti P ja moodustame järgmise summa: Vn= ƒ (P1) ∆S1 + ƒ (P2) ∆S2+…+ ƒ (Pn) ∆Sn Seda summat Vn nim funktsiooni ƒ integraalsummaks piirkonnas D Kahekordse integraali geomeetriline sisu : Olgu ƒ(x,y)≥0. Vaatleme keha Q, mis on ülalt piiratud pinnaga z = (x,y) alt ...
J. Kirs Loenguid ja harjutusi dünaamikast 19 4. Näiteülesanded. Näide 4.1 Masspunkt massiga 2 kg liigub sirgjooneliselt jõu F mõjul, mille algväärtus on 8 N ja mis kasvab igas sekundis 2 N võrra. Leida punkti liikumise seadus kui v0 = 0 . Lahendus Suuname x-telje piki punkti liikumissirget. Kuna siin on tegemist ühedimen- N sionaalse juhtumiga, siis kasutame diferentsiaalvõrrandi üldkuju (4.7), kus Fkx k =1 on kõigi mõjuvate jõudude projektsioonide summa x-teljele, s.t N m x = Fkx (4.15) k =1 ...
Keha liikumisvõrrand r(t)=x(t)i+y(t)+z(t)k, kus x(t), y(t), z(t) on kolm sõltumatut funktsiooni. Teist järku diferentsiaalvõrrand (Newtoni II) r=a= d²r/dt² = 1/m *F Ruutpolünoomi r(t) = r0+v0+ a/2 *t² -ühtlaselt muutuva liikumise valemit, kus r0 algasend, v0 algkiirus, a kiirendus Keha pöörlemisvõrrand (t)=0 + 0 *t + /2 *t² - ühikud on radiaan Newtoni II seadus (kiirendus- ja impulssesitus) r=a= 1/m *F Impilss ehk liikumishulk p= mv Kulgliikumise diferentsiaalvõrrand a=1/m *F r= d²r/dt²=1/m *F Kulg diferentsvõrr lahendamine jõu puudumisel ning konstantse jõu korral (tuletusega) a) kui jõud on null, x=0 d/dt (dx/dt)=0 dx/dt=v0x=const, dx=voxdt voxdt=voxt+x0 , kus vox ja x0 on koordinadi väärtusega ajahetkel t=0. b) kui j]ud on konstantne (raskujõud: F=mg, hõõrdejõud: F=P), on võrrandi lahendiks polünoom x= x0 + vox*t + ax/2 *t²; ax=1/m *Fx Töö: skalaarkorrutis ja joonintegraal A=Fs=Fscos((Fs)), kus s=r=r2-r1 ning ((Fs)) tähistab vekt...
MLF 1121 Geofüüsikaline hüdrodünaamika (Matemaatika ülevaade I) Jüri Elken Kursuses vajalik matemaatika Lineaarne algebraliste võrrandite süsteem Olgu n tundmatuga m võrrandist koosnev süsteem a11 x1 + a12 x 2 + ... + a1n x n = f 1 a 21 x1 + a 22 x 2 + ... + a 2 n x n = f 2 ................................... a m1 x1 + a m 2 x 2 + ... + a mn x n = f m maatrikskujul AX = F , a11 a12 ... a1n a a 22 ... a 2 n kus A = 21 , ... ... ... ... a am2 ... a mn m1 x1 f1 x ...
I kursus. Mehaanika Mehaaniline liikumine ühtlane sirgjooneline liikumine keha läbib mistahes võrdsetes ajavahemikes võrdsed teepikkused. (lk.30) ühtlaselt muutuv liikumine 1) liikumine, kus kiirus muutub mistahes võrdsete ajavahemike jooksul ühesuguste väärtuste võrra. 2) masspunkti või keha mehaaniline liikumine, mille korral kiirendus on konstantne ehk jääv/muutumatu suurus. (lk.37) taustsüsteem mingi kehaga (taustkehaga) seotud ruumiliste ja ajaliste koordinaatide süsteem. Taustsüsteem koosneb taustkehast ja koordinaatteljestikust koos aja mõõtmise süsteemiga. (lk.19) teepikkus trajektoori pikkus, mille liikuv keha või punktmass läbib mingi ajavahemiku jooksul. s = v · t, kus s - teepikkus, v - kiirus, t - aeg. (lk.17) nihe keha algasukohast lõppasukohta suunatud sirglõik, vektoriaalne suurus, tähis . (lk.17) hetkkiirus kiirus vaadeldaval hetkel või kiirus vaadeldavas trajektoori punktis. (lk.35) kiirendus väl...
Tõestamisülesanded (1) 1. Osata tõestada, et mingi antud funktsioon on pidev etteantud piirkonnas (loengus näide e funktsiooni y = sin x kohta). 2. Tuletada funktsiooni y = sin x tuletise valem. 3. Tuletada funktsiooni y = cos x tuletise valem. Valem 1: + - cos - cos = -2 sin sin 2 2 y= cos (x+x) cos x= (kasutad nüüd valemit 1) : = - 2 sin (x+x+x / 2) * sin (x+x x / 2) = -2 sin (2x/2 + x/2) * sin x/2= =-2 sin (x + x/2) * sin x/2 y/x= - 2 sin (x + x/2) * sin x/2 = - sin x/2 * sin (x+ x/2) x x/2 y'= lim - sin x/2 * sin (x+ x/2) = lim - sin x/2 * lim sin (x+ x/2) = - sin x x -> 0 x/2 -> 0 x -> 0 x/2 x/2 See ringi sees = -1 4. Tuletada funktsiooni y = arc sin x tulet...
1. Mis on nihe ja vääne? keha liikumise alg- ja lõpp-punkti ühendav vektor.; varda tööseisund, mille puhul sisejõududena esinevad ainult väändemomendid. 2. Sõnastage Hooke’i seadus nihkedeformatsiooni korral. Suhteline nihe on elastsel deformatsioonil võrdeline deformatsiooni põhjustava pingega 3. Defineerige nihkemoodul ja väändemoodul. Nihkemoodul G näitab, kui suur tangentsiaalpinge tekib kehas ühikulise suhtelise nihke korral. Väändemoodul võrdub arvuliselt jõumomendiga, mis tekitaks traadis üheradiaanilise väändenurga. 4. Nimetage nihkemooduli ühikud ja leidke ühikutevahelised seosed. Paskal ehk N/ruutmeetrikohta – jõud, mis on kehal ühe ruutmeetri kohta. 5. Mis on mehaaniline pinge? Mis on tangentsiaalpinge? Mehaaniline pinge näitab, kui suur jõud mõjub kehas lõikepinna ühiku kohta. Kui aga jõud mõjub piki pinda, on tegemist tangentsiaalpingega. 6. Mis on nihke põhjuseks? Nihke põhjus on keha ...
Seadused ja valemid Loeng 11. Coulomb'i seadus (vektorkujul!). Kaks punktlaengut mõjutavad teineteist jõuga, mis on võrdeline nende kehade laengutega ning pöördvõrdeline nende vahelise kauguse ruuduga. , Seda saab kirja panna, kui kasutada meile juba tuntud vektorsümboolikat: Väljatugevus ja potentsiaal, seos nende vahel. Mida tugevam on väli (tihedamalt jõujooned) seda kiiremini muutub potentsiaal (seda lähemal on üksteisele samapotentsiaalipinnad). Elektrivälja kohta kehtivad kaks teoreemi: Elektriväljad on sõltumatud; laengule mõjub summaarne väli. Elektrivälja tugevuse voog läbi kinnise pinna on võrdne selle pinna sisse jäävate laengute summaga. Gauss'i teoreem. Elektrivälja tugevuse voog läbi kinnise pinna...
AATOMIFÜÜSIKA Aatom (vana-kr atomus jagamatu) on keemilise elemendi väiksem osake. 19.saj. lõpus avastati et aatom ei ole jagamatu. 1897.a. avastati ELEKTRON(-), väike osake, mis pesitseb aatomis. J.J.Thompson. Th aatomimudel e. Rosinakukkel. E.Rutherford palus pommitada õhukest kuldlehte alfaosakestega. Avastas aat tuuma 1911 selle katsega. Planetaarne mudel e RUTHERFORDI mudel on vastuolus klassikalise füüsikaga 1) Tiirlev elektron peaks tekitama elektromagnetlaineid 2)kiirgav elektron peaks kiirgama energiat ja kukkuma vastu tuuma. DE BROGLIE HÜPOTEES Igal osakesel on olemas laine omadused, mille lainepikkust saab arvutada valemist =h/(mv) h=6,63*10-34Js Hiljem leidis see hüpotees katselist kinnitust. Tänapäeval ei loeta mitte elektroni ennast laineks, vaid elektroni käitumine on tõenäosluslik ja vastava tõenäosusfunktiooni kuju on laineline. Seda fn´i nim LAINEFUNKTSIOONIKS. Rutherfordi aatomi täiustamisega tegeles Taani füüsik NIL...
Aatomimudelid I Thomson Avastas elektroni Thomson tegi esimese aatomi mudeli. Rosina kukli mudel. Aatom koosneb elektronidest ja prootonitest, mis on jaotunud mööda aatomit laiali II Rutherford Kuldlehekatse - Rutherford pommitas kulla-aatomeid alfaosakestega(suure massiga heeliumi aatomi tuum, + laenguga). Suurem enamus läbis kuldlehte ilma takistusteta. Mõned üksikud põrkusid tagasi. Järeldus : 1) Aatom koosneb enamasti tühjusest 2) Aatomis peab olema miskit positiivselaenguga ehk tuum.. pisike ja väike Järeldas sellest, et Thomsoni aatomi mudel on vale! Aatomi tuuma järeldas sellest, et positiivse laenguga alfaosakesed põrkusid aatomist tagasi, sama märgilised laengud tõukuvad. Rutherfordi aatomi tuuma omadused: suure tihedusega positiivne laeng III Bohr Bohri teooria - Bohri aatomiteooria on ühe-elektroniliste aatomite poolklassikaline mudel. Bohri postulaadid: 1. Aatomis leiduvad olekud, m...
Tallinna Tehnikaülikool Elektriajamite ja Jõuelektroonika Instituut Automaatjuhtimine Tunni tööde aruanded Õpilane Juhendajad: Tõnu Lehtla Rainer Kährik Tallinn 2008 Lineaarsete süsteemide tüüplülid Töö eesmärk: Tutvuda integreerimis-, võnke- ning aperioodilise lüliga alljärgneva kava alusel. Integreerimislüli: 1)Teoreetiline ülevaade: Integreerimislüli nimetatakse ka astaatiliseks lüliks ning I-lüliks. Ideaalne integreerimislüli väljundsignaal kasvab (või kahaneb pidevalt püsiva kiirusega, kui xs 0 ja on konstantne. Kiiruse määrab hüppe suurus sisendil. Reaalsel integreerimislüli (kirjeldatav IT1-lüliga) on väljundsignaali kasvamiskiirus alghetkel null ja tõuseb pikkamööda lõpliku kiiruseni. · Diferentsiaalvõrrand: v (t)=Ku (t) · Ülekandefu...
TALLINNA TEHNIKAÜLIKOOL Mehhatroonikainstituut JÜRI KIRS INSENERIMEHAANIKA III Loenguid ja harjutusi dünaamikast Tallinn 2004 J. Kirs Loenguid ja harjutusi dünaamikast 2 III osa. DÜNAAMIKA §1. Sissejuhatus 1. Dünaamika aine ja põhikategooriad Dünaamikaks nimetatakse mehaanika osa, milles uuritakse materiaalsete kehade liikumist neile rakendatud jõudude mõjul. Staatikas uuritakse ainult jõudusid ja jõusüsteeme ning seal ei uurita seda, kuidas liiguks materiaalne osake või jäik keha kui sellele need jõud rakendada. Kinemaatikas uuritakse ainult liikumist, kuid seda puht geomeetrilisest aspektist, jättes täielikult välja jõud, mis selle liikumise põhjustavad. Dünaamikas uuritakse materiaalsete osakeste ja jäikade kehade liikumist neile rakendatud jõudude toimel ning ka...
Mitmemuutuja funktsiooni mõiste. Mitmemuutuja funktsiooni piirväärtuse definitsioon. Pideva mitmemuutuja Kui funktsiooni z=f(x,y) on diferentseeruv kohal (x,y), siis funktsioon f on pidev sellel kohal. funktsiooni definitsioon. Kahemuutuja funktsiooni pidevuse geomeetriline sisu. Funktsioon z=f(x,y) on diferentseeruv kohal (x,y) siis, kui funktsioonil z=f(x,y) on pidevad osatuletised fx ja fy kohal (x,y). Kui hulga Rn igale punktile P(x1, . . . , xn) on vastavusse seatud muutuja u R kindel väärtus, siis öeldakse, et hulgal on Kui funktsiooni f(x,y) osatuletised fx(x,y) ja fy(x,y) on diferentseeruvad kohal (x,y), siis fxy = fyx kohal (x,y). defineeritud n-muutuja (skalaarväärtusega) funktsioon. Suurust df:=fx(x,y)dx + fy(x,y)dy, kus dx:= x...
1. Mitmemuutuja funktsiooni lokaalsete ekstreemumite mõisted. Statsionaarne punkt. Kriitiline punkt. piirkonna D rajajoon. Eeldame, et piirkonnas D on täidetud tingimus f(x,y)>=g(x,y). Kahekordse integraali 𝑥 = 𝜌 𝑐𝑜𝑠𝜑 Mitmemuutuja funktsiooni lokaalse ekstreemumi tarvilik tingimus. Definitsioon 1. Öeldakse, et kahe omaduse tõttu ∬𝐷[𝑓(𝑥, 𝑦) − 𝑔(𝑥, 𝑦)]𝑑𝑥𝑑𝑦 = ∬𝐷 𝑓(𝑥, 𝑦)𝑑𝑥𝑑𝑦 − ∬𝐷 𝑔(𝑥, 𝑦)𝑑𝑥𝑑𝑦. Mõlemad kahekordsed 𝑦 = 𝜌 𝑠𝑖𝑛𝜑 muutuja funktsioonil on punktis P1(x1, y1) lokaalne maksimum, kui sellel punktil leidub niisugune ümbrus teisendus on kujul 𝑧=𝑧 .Tavaliselt € [0, +lõpmatus) φ € [0, 2π). ∭Ω 𝑓(𝑥, ...
Diferentsiaalvõrrand: Laplace'i teisendus: Astmelise muutumise korral: Lahutusteoreem: kus si on funktsiooni Saadud nullkohad: ; ja Ci on leitav valemiga kus . Saadud väärtused on: Kujutise uus kuju: Siirdefunktsioon: Siirdefunktsiooni väärtused (eeldusel, et kui siis ): Tabel 1. Siirdefunktsiooni väärtused. t x(t) t x(t) t x(t) 2,04 0 56,04 1,4932 110,04 1,9037 4,04 0,0186 58,04 1,5206 112,04 1,9105 6,04 0,0822 60,04 1,5466 114,04 1,9170 8,04 0,1670 62,04 1,5714 116,04 1,9232 10,04 0,2567 64,04 1,5949 118,04 1,9290 12,04 0,3448 66,04 1,6172 120,04 1,9346 14,04 0,4294 68,04 1,6384 122,04 1,9399 16,04 ...
Kordamisküsimused 1. Funktsioon - Olgu X mingi reaalarvude hulk. Kui muutuja x igale väärtusele hulgas X vastab muutuja y üks kindel väärtus, siis öeldakse, et y on muutuja x funktsioon. Funktsiooni esitusviis: tabelina, graafikuna. Funktsiooni analüütiline esitusviis on ilmutatud, ilmutamata, parameerilisel kujul. 2. Funktsioonide liigitus (paaris- ja paaritud funktsioonid, perioodilised funktsioonid, monotoonsed funktsioonid, tõkestatud funktsioonid). Tuua näiteid. paarisfunktsioon - Funktsiooni y = f (x) nimetatakse paarisfunktsiooniks, kui f (-x) = f (x) Paarisfunktsiooni graafik on sümmeetriline y-telje suhtes paaritu funktsioon - Funktsiooni y = f (x) nimetatakse paarituks funktsiooniks, kui f (-x) = -f (x). paaritu funktsiooni graafik on 0 punkti suhtes sümmeetriline perioodiline funktsioon - Funktsiooni f (x) nimetatakse perioodiliseks, kui l...
Sissejuhatus Erinevad ühikud rad rad 1 2 = 1Hz 1 = Hz s s 2 Vektorid r F - vektor r F ja F - vektori moodul Fx - vektori projektsioon mingile suunale, võib olla pos / neg. r Fx = F cos Vektor ristkoordinaadistikus Ükskõik millist vektorit võib esitada tema projektsioonide summana: r r r r F = Fx i + Fy j + Fz k , millest vektori moodul: F = Fx2 + Fy2 + Fz2 Kinemaatika Kiirus Keskmine kiirus Kiirus on raadiusvektori esimene tuletis aja t2 järgi. s v dt s v = - võimalik leida ühtlase liikumise kiirust vk = = t1 t t t ds ...
Aatomifüüsika Aatomifüüsika: Bohri aatomimudel: peakvantarv, energianivoo, Bohri postulaadid. Kvantmehaanika teke ja põhiideed. Kaasaegne aatomimudel. Energiatasemed tahkises: metall, pooljuht, dielektrik. Aatomifüüsika · Aatomifüüsika käsitleb keemiliste elementide algosakestes - aatomites toimuvaid protsesse. · Aatomifüüsika kitsamas mõttes tegeleb aatomite elektronkatete uurimisega; aatomituumas toimuvaid protsesse uurib tuumafüüsika. Aatomimudel · Mis on mudel? Sõnaga "mudel" tähistavad teadlased mitte harjumuspärast odavat vähendatud koopiat, vaid originaaliga sarnaselt funktsioneerivat süsteemi. Aatomimudelid · Demokritos 5. saj. e.Kr. andis aatomile nime jaotamatu, katkilõikamatu. · Rosinakukli mudel Thomson · Planetaarmudel · Bohri mudel · Pilve mudel Aatomimudelid · Thomsoni aatomimudel kujutas endast sfäärilise sümmeetriaga homog...
Dün, klassikaline dün-punktmasside ja jäikade liikumiss(nt s=f(t)ja leida tuleb punktm-le on inertsimom antud teljega paralleelse ja Kin en tuletis aja järgi =mõjuva jõu võimsusega kehade dün-on staatika ja kinemaatika rakendatud F, mis põhjustab selle liikumise. masskeset läbiva telje suhtes ning teine Rööpl korral: T=m*vc²/2 Pöörleva l korral: kokkupandult. Käsitletakse liikumise 2.On teada punktm-le mõjuv F.Leida tuleb liidetav=keha massi ja telgedevahelise kauguse T=Iz*z²/2 Tasap l korral: T= m*vc²/2+ põhjustajaid(jõude), mis alati tekitab kehale punktm-i liikumiss. ruudu korrutisega. Ümarmat korral: Iz*z²/2 kiirenduse. Punktmassi liikumise diferentsiaalvõrrand e Ix=Iy=m*r²/4 Rõnga/toru korral: Ix=Iy=m*r²/2 Keha pot en suurendamiseks on vaja teha töö...
Sisujuht 16. Esimest liiki katkevuspunkt - niisugust katkevuspunkti, kus funktsioonil f on olemas ühepoolsed piirväärtused f ( a+) = lim f(x); x a+ ja f( a- ) = lim f(x); x a - nimetatakse 1. liiki katkevuspunktiks. ( hüppekoht, kõrvaldatav katkevuskoht, ................................................... 3 17. Teist liiki katkevuspunkt - arvu a nimetatakse funktsiooni y = f(x) teist liiki katkevuspunktiks, kui lim f(x); x a - on lõpmatu või ei eksisteeri ............................................ 4 20. Diferentseeruv funktsioon - kui funktsioonil y = f(x) on tuletis punktis x = x0, siis ütleme, et funktsioon on diferentseeruv punktis x0. Kui funktsioon on aga diferentseeruv mingi piirkonna igas punktis, öeldakse, et funktsioon on diferentseeruv selles piirkonnas. ..................................... 4 1. Arvuhulgad: naturaal-, täis-, ratsionaal-, reaal- ja kompleksarvud. Nende omadused. ...............6 2. Reaalarvu absoluutväärt...
1) Impulss ehk liikumishulk on füüsikaline suurus, mis on võrdne keha massi ning kiiruse korrutisega. Kehtib ka liikumishulga jäävuse seadus, mis ütleb: suletud süsteemi kuuluvate kehade liikumishulkade geomeetriline summa on nende kehade igasuguse vastastikmõju korral jääv. Suletud süsteem on süsteem, mis ei ole vastastikkuses mõjus süsteemiväliste kehadega. 2) Staatiline hõõre - (keha seisab paigal) Dünaamiline hõõre - (keha liigub ühtlase kiirusega) 3) Kineetiline energia on liikuva keha energia, mis on võrdne poole ()antud keha massi ja tema kiiruse ruudu korrutisega. . Kineetilise energia tuletis aja järgi on keha võimsus 4) Konservatiivsed jõud on sellised, mille töö liikumisel 1 2 ei sõltu trajektoorist, vaid punktide 1 ja 2 asukohast ruumis. Konservatiivsete jõudude alla kuuluvad nt potentsiaalne energia (gravitatsiooni jõud ja vedru jõud ) 5) Energia jäävuse seadus on üks olulisimaid jäävusseaduseid ...
KT2 Energia Mehaaniline töö ja võimsus meh tööd tehakse siis kui kehale mõjub jõud ja keha sooritab jõu mõjul nihke, tööd teeb alati jõu liikumissihiline komponent. Energia muutmise protsessi jõudude toimel nim tööprotsessiks. Energia muutust sellel protsessil nim jõudude poolt tehtud tööks. dA=Fdr. Võimsus f.s. mis näitab kui suur töö tehakse ühes ajaühikus P=dw/dt= dA/dt=Fdr/dt=Fv. Kineetiline energia kulgliikumisel mõõtub tööga, mida tuleks teha, et keha täielikult peatada. dWk= dA=Fdr=dmv *dr/dt=dmv * vdt/dt -> dWk=dA=v*dmv || keha relativistlik mass on ühtlasi tema koguenergia mõõt. Mass ja energia on ekvivalentsed suurused dWk=c2dm; Wk=mc2 m0c2 Gravitatsiooniseadus jõud, millega kaks keha tõmbuvad, võrdeline nende kehade massidega ning pöördvõrdeline nendevahelise kauguse ruuduga. Gravi võlja isel suurused väli on ainest erinev mateeria eksisteerimise vorm, mille kaudu aine osakesed mõjutavad teineteist. Välja isel välj...
TARTU KUTSEHARIDUSKEKSUS RÕIVAÕMBLUS MO13 Evelin Rahuorg NEWTONI SEADUSED Referaat Juhendaja: Dmitri Luppa Tartu 2013 SISUKORD Sissejuhatus...................3 1. Newtoni seadused........................4 2. Newtoni esimene seadus...................5-6 3. Newtoni teine seadus................................7 4. Newtoni kolmas seadus.....................................8 5. Isaac Newton...........................................................9-11 Kokkuvõte............12 Kasutatud allikad.......13 2 SISSEJUHATUS Mu referaadi teemaks on Newtoni seadused. Nad jagunevad kolmeks seaduseks, mida tänapäeval kasutatakse füüsikas. Newtoni kolm seadust panevad aluse klassikalisele mehaanikale. Newtoni seadused avastas Isaac Newton, kes oli inglise füüsik, matemaatik, astronoom, teoloog...
Tallinna Polütehnikum Isaac Newton Värviõpetuse referaat Koostas: Relika Viilas Trükitehnoloogia TA-08 Saku 2009 Sisukord 1. Issaac Newtoni elulugu........................................................................................................3-5 2. Newtoni seadused................................................................................................................5-6 3. Newtoni panus optikasse.....................................................................................................6-7 4. Kasutatud allikad.....................................................................................................................8 2 Isaac Newtoni elulugu ...
1. Ainepunkti kinemaatika a. Ainepunkti kiirus b. Ainepunkti kiirendus c. Ringliikumine. Nurkkiirus ja –kiirendus d. Pöörlemist kirjeldavate suuruste vektoriseloom e. Tahke keha kulgev ja pöörlev liikumine A)Ainepunkti kiirus Kõige lihtsam mehaaniline liikumine on ainepunkti liikumine. Mõõtmed ja kuju võib jätta arvestamata tema liikumise kirjeldamisel. Kas lihtsustus on õigustatud või mitte, see oleneb liikumisülesandest. Näiteks Maad võib liikumisel ümber Päikese vaadelda ainepunktina, kuid pöörlemisel ümber oma telje mitte. B)Ainepunkti kiirendus Kiirenduseks nimetatakse kiiruse muutumise kiirust. Sellest definitsioonist järgneb, et kiirendus arvutud analoogiliselt kiirusega – tuletise abil. Kiiruse puhul � = lim ∆�→0 ∆� ∆� = �� �� = � = � ′ leidsime tuletise kohavektorist aja järgi ja saime selle muutumise kiiruse ehk lihtsalt kiiruse. Võttes tuletise kiirusest, saame kiiruse muutumise kiiruse � = lim ∆�→0 ∆� ∆� = �� �� = ...
Matemaatika põhimõisted ja - definitsioonid 1. Funktsioon- kui muutuva suuruse x igale väärtusele, mis kuulub tema muutumispiirkonda, vastab teise suuruse y üks kindel väärtus, siis öeldakse, et y on x funktsioon. 2. Elementaarne põhifunktsioon- elementaarseteks põhifunktsioonideks nim. järgmisi analüütiliselt antud funktsioone: konstantne funktsioon y = c; astmefunktsioon y = xa ; eksponentfunktsioon y = ax , kus a on ühest erinev pos. arv; logaritmfunktsioon ; trigonomeetrilised funktsioonid; arkusfunktsioonid; 3. Elementaarfunktsioon- funktsioon, mis saadakse põhielementaarfunktsioonidest lõpliku arvu aritmeetiliste tehete ja liitfunktsioonide moodustamise tulemusena. 4. Tõkestatud funktsioon- funktsiooni f(x) nim. tõkestatuks piirkonnas A, kui leidub selline reaalarv k, nii et | f(x) | <= k iga x A korral. 5. Perioodiline funktsioon- funktsiooni f(x) nim. perioodiliseks, kui leidub selline nullist eri...
MATEMAATIKA EKSAM. 1. Muutuvad suurused (üldiselt). 1)konstantsed suurused 2)muutuvad suurused NT: ühtlase liikumise korral on kiirus konstante suurus, teepikkus aga muutuv suurus. Funktsiooni mõiste (definitsioon, tähistused, näited). Funktsiooni esitusviise (piltlik, valemiga, tabelina, nooldiagrammina, sõnadega jne). Ühesed, paaris- ja paaritud, perioodilised, kasvavad ja kahanevad funktsioonid (definitsioonidega). Definitsioon: muutuvat suurust y nimetatakse muutuva suuruse x funktsiooniks, kui suuruse x igale väärtusele on vastav y üks väärtus Tähistused: argument(muutuja) x; argument(muutuja) y; määramispiirkond X; muutumispiirkond Y Näited: 2. Funktsiooni graafik (definitsioon, piltlik esitus). Definitsioon: funktsiooni graafik= {(x,f(x)): x∈X} Piltlikult: 3. Pöördfunktsioon (definitsioon). Näiteid. Kuidas leida pöördfunktsioone? Defin...
FÜÜSIKA EKSAM 1. VEKTORID Vektorid ja skalaarid Suurusi, mida saab esitada ühe arvuga, nimetatakse skalaarseteks suurusteks Suurust, mille täielikuks määramiseks on peale arvväärtuse vaja ka sihti ja suunda, nimetatakse vektoriaalseks suuruseks Vektoriks nimetatakse suunatud sirglõiku sellist sirglõiku iseloomustavad siht, suund ja pikkus: siht näitab, kuidas vektor asetseb suund näitab, kummale poole on vektor sihil suunatud pikkus on vektori arvväärtuseks Vektori koordinaatide arvutamine: Kui A(x1;y1) ja B(x2;y2), siis vektor AB = (x2-x1;y2-y1) Nullvektor Vektorit O = (0; 0) nimetatakse nullvektoriks o nullvektori pikkus on võrdne nulliga o nullvektori alguspunkt ja lõpp-punkt ühtivad o nullvektori siht ja suund ei ole määratud Vektorite liitmine Vektorite summa koordin...
Soojusautomaatika eksamiküsimuste vastused 1. Põhimõisted automatiseeritud tootmise alalt. Automaatikasüsteemide klassifikatsioon nende otstarbe järgi. Näited. Automatiseeritud tootmise põhimõisted: 1. Objekt 2. Regulaator 1. Andur 2. Tajur 3. Automaatikasüsteem Automaatikasüsteemide klassifikatsioon otstarbe järgi: 1. Automaatreguleerimise süsteemid (ARS) 2. Distantsioonjuhtimise süsteemid (DJS) 3. Tehnoloogilise kaitse süsteemid 4. Automaatblokeeringu süsteemid (ABS) 5. Reservseadme automaatse käivitamise süsteem (RAKS) 6. Automaatsed tehnoloogilise kontrolli süsteemid (ATKS) 7. Signalisatsioonisüsteemid (SS) valgus ja helisüsteemid 1. Tehnoloogiline SS andmed seadmete töö ja üksikute parameetrite kohta 2. Avarii SS teatavad võimalikest avariilistest olukordadest ja juba tekkinud avariidest 3. tsentraalsed SS on ette nähtud signalisatsioonisüste...
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi ...
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaa...
Kordamisküsimused : TEST: Loeng 11 Elektriväli ja magnetväli. Suurused: · Elektrilaeng - q (C) · elektrivälja tugevus E-vektor (1N / C) · elektrivälja potentsiaal = töö, mida tuleb teha (positiivse) ühiklaengu viimiseks antud väljapunktist sinna, kus väli ei mõju. (J) · magnetiline induktsioon B-vektor · Coulomb'i seadus kui pöördruutsõltuvus - Kaks punktlaengut mõjutavad teineteist jõuga, mis on võrdeline nende kehade laengutega ning pöördvõrdeline nende vahelise kauguse ruuduga. · Elektrivälja tugevuse valem ja väljatugevuste liitumine (vektorkujul!). Elektrivälja tugevus = sellesse punkti asetatud positiivsele ühiklaengule (+1C) mõjuv jõud. · Juhi potentsiaali ja mahtuvuse vaheline seos. Mahtuvus - juhile antud laeng jagatud juhi potentsiaaliga. Farad (F) - juhi mahtuvus, kui laeng 1 C tõstab tema potentsiaali 1 V võrra. Loeng 1...
Kordamisküsimused : TEST: Loeng 11 Elektriväli ja magnetväli. Suurused: · Elektrilaeng - q (C) · elektrivälja tugevus E-vektor (1N / C) · elektrivälja potentsiaal = töö, mida tuleb teha (positiivse) ühiklaengu viimiseks antud väljapunktist sinna, kus väli ei mõju. (J) · magnetiline induktsioon B-vektor · Coulomb'i seadus kui pöördruutsõltuvus - Kaks punktlaengut mõjutavad teineteist jõuga, mis on võrdeline nende kehade laengutega ning pöördvõrdeline nende vahelise kauguse ruuduga. · Elektrivälja tugevuse valem ja väljatugevuste liitumine (vektorkujul!). Elektrivälja tugevus = sellesse punkti asetatud positiivsele ühiklaengule (+1C) mõjuv jõud. · Juhi potentsiaali ja mahtuvuse vaheline seos. Mahtuvus - juhile antud laeng jagatud juhi potentsiaaliga. Farad (F) - juhi mahtuvus, kui laeng 1 C tõstab tema potentsiaali 1 V võrra. Loeng 1...
KORDAMISKÜSIMUSED 2015/2016 Kõrgem matemaatika MTMM. 00.145 (6EAP) 1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega. Kui aij on reaalarvud ning i = 1; 2;...;m ja j = 1; 2;...; n, siis tabelit: nimetatakse täpsemalt (m x n)-maatriksiks ja kasutatakse tähistusi Am x n või Amn. Arvupaari (m; n) nimetatakse maatriksi A mõõtmeteks. Tabelis paiknevaid arve aij nimetatakse maatriksi elementideks. i reaindeks; j veeruindeks. reamaatriks (1 x n); veerumaatriks (m x 1); ruutmaatriks m = n Tähistused: maatriksi järk naturaalarvude paar m x n (ridade ja veergude arv). ruutmaatriksi korral järk n (n = ridade arv = veergude arv). maatriksi liigid: nullmaatriks kõik elemendid 0. tähistus teeta ...
10. Kuidas lahutatakse vektoreid komponentideks ja miks see on Leiame seose nende koordinaatide vahel, eeldusel, et aeg kulgeb ühteviisi mõlemas taustsüsteemis st . Aega ...
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut BORIS GORDON, EDUARD PETLENKOV ISS0010 SÜSTEEMITEOORIA ÜLESANNETE KOGU 2007 Parandatud 2009 Kaane kujundanud Ann Gornischeff Autoriõigus: B. Gordon, E. Petlenkov, 2007 ISBN 978-9985-59-688-3 2 EESSÕNA Käesolev ülesannete kogu on mõeldud kasutamiseks abimaterjalina õppeaines ISS0010 Süsteemiteooria. Kogu täiendab Hanno Sillamaa õpikut "Süsteemiteooria", millel on olnud juba neli trükki. Iga peatüki alguses on toodud viide selle õpiku (Hanno Sillamaa. Süsteemiteooria, TTÜ kirjastus) vastavatele teoreetilistele peatükkidele. Kui selles õpikus vastavat materjali ei ole, siis on antud viide teisele raamatule (K. Ogata. Modern control engineering, 2002). Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval- mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teor...
XVII Miks ei saa ainult jõuga kirjeldada pöörlevat liikumist? ( jõumoment, rakenduspunkt)Pöörlevale kehale rakendades jõu tekib kiirendus, katsed näitavad et see ei olene vaid jõu suurusest vaid ka jõurakenduspunkti asukohast ja jõu suund on tähtis. Järelikult ei piisa pöörlevale kehale avaldatava mõju kirjeldamisel ainult jõu mõistest. Tuleb kasutada jõumomenti. ( näitena võib tuua ukselingi ) Galilei kiiruse teisendusvalemid? x x ut ( Vx,Vy,Vz ) Midagi seoses kella ja realativistku aegruumiga??????????????? y y Sündmuste on samaaegsed samas süsteemis kui nad toimuvad ühes ja samas kohas. XIX Kahes erinevas kohas sündmuse Sündmuste samaaegsus?Sündmuste on samaaegsed samas z z samaaegs...
XVII 1) Miks ei saa ainult jõuga kirjeldada pöörlevat liikumist?( jõumoment, rakenduspunkt) Pöörlevale kehale rakendades jõu tekib kiirendus, katsed näitavad et see ei olene vaid jõu suurusest vaid ka jõurakenduspunkti asukohast ja jõu suund on tähtis. Järelikult ei piisa pöörlevale kehale avaldatava mõju kirjeldamisel ainult jõu mõistest. Tuleb kasutada jõumomenti. ( näitena võib tuua ukselingi ) 2) Galilei kiiruse teisendusvalemid? ( Vx,Vy,Vz ) x = x + ut y = y z = z 3) Midagi seoses kella ja realativistku aegruumiga??????????????? Sündmuste on samaaegsed samas süsteemis kui nad toimuvad ühes ja samas kohas. Kahes erinevas kohas sündmuse samaaegsust saax kui mõlemas kohas asuks sünkroniseeritud kellad. Seega tuleb relativislikus aegruumis toimuvate sündmuste kirjeldamiseks sinna paigutada veel, lisaks koordinaatsüsteemile ,kellad ,mis kõik o...
Süsteemi mõiste. Süsteemimudel. Muutujad ja parameetrid. Sisend-, oleku- ja väljundmuutujad. Millest sõltub süsteemi käitumine. Süsteemi matemaatiline mudel ja selle koostamine. Algolek ja selle sisu. Dünaamiline süsteem. Pidev- ja diskreetaja süsteemid. Süsteemi mõiste: Süsteem on omavahel seotud objektide terviklik kogum. Süsteem on see, mida saab vaadelda süsteemina (süsteem on subjektiivne – kui tahan, vaatan süsteemina, kui ei taha, ei vaata). Süsteem on funktsioon sisendist ja siseolekust, kui see võrrand teada, siis see võrrand on süsteem ehk süsteemimudel. Süsteemi omadused: element/objekt, sidemed (mistahes seosed elementide vahel, võivad olla orienteeritud, vastastikused, muutlikud, juhuslikud jne), terviklikkus, süsteemil on hierarhia, süsteemil on kindel käitumine. Põhiülesanded: süsteemide modelleerimine (mudelite koostamine), süsteemide analüüs (meetodid süsteemide uurimiseks), süsteemide süntees (meetodid süsteemide loomi...
TE.0568 Kõrgema matemaatika põhikursus (4 EAP) 2011/2012 sügis 1. Determinandid: omadused, miinorid, alamdeterminandid. Crameri meetod lineaarvõrrandisüsteemi lahendamiseks. Determinant on lineaaralgebras funktsioon, mis seab igale ruutmaatriksile vastavusse skalaari, ning on üks olulisemaid matemaatilisi konstruktsioone lineaarvõrrandsüsteemi uurimisel. Determinandiks nimetatakse ruutmaatriksiga seotud arvu, mis on arvutatud teatud eeskirja kohaselt. Determinante tähistatakse DA Maatriksi A determinanti tähistatakse tavaliselt , või . Determinant on defineeritud vaid ruutmaatriksile. Determinandi põhiomadused 1. Maatriksi determinandi väärtus ei muutu maatriksi transponeerimisel: det(A) = det(AT). 2. Determinant on null, kui determinandi 1 rida või veerg : 1. koosneb nullidest 2. on võrdne mõne teise...
MATEMAATILINE ANALÜÜS I. KORDAMISKÜSIMUSED 1. Muutuvad suurused (tähistus, jaotus). Matemaatilises analüüsis tähistatakse muutujad väikeste tähtedega (x, y, a jne). Näiteid muutujate vahelistest suhetest: „Patsiendi vererõhk sõltub ravimite manustamise hulgast“, „Ringi pindala sõltub raadiusest“ Jaotus: a) Konstantsed suurused – ei muutu, omavad alati ühte ja sama väärtust N: ühtlane liikumine – kiirus on konstantne, teepikkus on muutuv suurus) b) Muutuvad suurused N: mitteühtlane liikumine – nii kiirus kui teepikkus muuutvad 2. Funktsiooni mõiste (definitsioon, tähistused, näited). DEF. Muutuvat suurust y nimetatakse muutuva suuruse x funktsiooniks, kui mingi eeskirjaga on suuruse x igale väärtusele seatud vastavusse suuruse y üks väärtus. Asjaolu, et y on x-i funktsioon, tähistatakse y = f(x) • Muutujat x nimetatakse sõltumatuks muutujaks (ehk argumendiks). • Muutujat y nimetatakse sõltuvaks muutujaks. • ...
1. RAHVUSVAHELINE MÕÕTÜHIKUTE SÜSTEEM SI. PÕHIÜHIKUD, ABIÜHIKUD JA TULETATUD ÜHIKUD SI-süsteem kasutab 7 füüsikalist suurust põhisuurustena ning nende suuruste ühikuid nimetatakse põhiühikuteks. Ülejäänud füüsikaliste suuruste mõõtühikud SI-süsteemis on tuletatud ühikud, need on määratud põhiühikute astmete korrutiste kaudu. Põhiühikud: m, kg, s, A, K, mol, cd. Abiühikud: rad, sr (steradiaan). Tuletatud ühikud: N, Pa, J, Hz, W, C 2. KLASSIKALISE FÜÜSIKA KEHTIVUSPIIRKOND. MEHAANIKA PÕHIÜLESANNE. TAUSTSÜSTEEM Seda makromaailma kirjeldavat füüsikat, mille aluseks said Newtoni sõnastatud mehaanikaseadused, nimetatakse klassikaliseks füüsikaks. Mehaanika põhiülesandeks on leida keha asukoht mistahes ajahetkel. Taustsüsteem on mingi kehaga (taustkehaga) seotud ruumiliste ja ajaliste koordinaatide süsteem. Taustkeha, koordinaatsüsteem ja ajamõõtmisvahend (kell) moodus...
AATOMI JA TUUMAFÜÜSIKA 12. KL Mikro ja makro Mikro ja makro1 Mikromaailma all tuleb mõista aine elementaarosakesi ja nendega toimuvaid füüsikalisi protsesse. Vastav füüsikaosa kannab nimetust mikrofüüsika. Teadusharu on tekkinud 20. Sajandil. Eelduseks oli radioaktiivsuse, aatomi ja tuuma avastamine. Põhiliseks uurimismeetodiks on siin kaudne katse. Makromailm on see, mida me oma meeltega vahetult tajume. Selles maailmas kehtib klassikaline füüsika oma seadustega. Alused pärinevad 17. Sajandist. Mateeria ja aine · Ld. k materia algollus · Vanakreeka filosoofias algaine · Loodusteadustes aine · Kaasaegses füüsikas mateerial kaks vormi aine ja väli Millest koosneb aine? · Demokritos V-IV sajand eKr atomus jagamatu · XVII sajandil aatomi idee taassünd inglise keemik John Dalton käsitles keemilist elementi ainena, mis koosneb ainult üht tüüpi aatomit...
1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega: Maatriksi järk tähistab maatriksi mõõtmeid: A on m*n järku maatriks. Liigid: · Ruutmaatriks (m=n) · Diagonaalmaatriks ruutmaatriks, mille peadiagonaalis arvud, muud elemendid 0-d. · Ühikmaatriks diagonaalmaatriksi erijuht. Peadiagonaali elemendid 1-d. Täh E. · Nullmaatriks kõik nullid. Täh . 2. Tehted maatriksitega (korrutamine arvuga, liitmine, lahutamine, korrutamine). · Korrutamine arvuga: korrutades maatriksit reaalarvuga, muutuvad kõik elemendid, selle arvu korra suuremaks. · Maatriksite liitmine: mõõtmed peavad olema samad. Ühemaatriksi elemendid liidetakse teise maatriksi vastavate elementidega: A = (a ij) ja B = (bij) A+B =(cij) kus cij =...
Kui jõusüsteemiga on ekvivalentne üksainus jõud, siis seda jõudu nimetatakse süsteemi resultandiks. 1. Tasakaaluaksioom. Kaks absoluutselt jäigale kehale rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on samal sirgel ja võrdvastupidised 2. Superpositsiooniaksioom. Tasakaalus olevate jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha tasakaalu või liikumist. Järeldus: jäiga keha tasakaal ei muutu, kui kanda jõu rakenduspunkt piki mõjusirget üle keha mistahes teise punkti. 3. Jõurööpküliku aksioom. . Kui keha mingis punktis on rakendatud kaks jõudu, siis neid saab keha seisundit muutmata asendada resultandiga, mis võrdub nende geomeetrilise summaga. Aksioom kehtib ka deformeeruva keha juhul. 4. Mõju ja vastumõju aksioom (Newtoni III seadus ). Kaks keha mõjutavad teineteist võrdvastupidiste jõududega, millel on ühine mõjusirge. 5. Jäigastamise aksioom. . Deformeeruva keha tasakaal ei mu...
163 Tugevusanalüüsi alused 11. DETAILIDE PAINDEDEFORMATSIOONID 11. DETAILIDE PAINDEDEFORMATSIOONID 11.1. Varda elastne joon Elastne joon = painutatud varda telje (ehk Elastse joone igat punkti neutraalkihi) kujutis peatasandil iseloomustavad selle läbipaine ja puutuja pöördenurk (Joon. 11.1): Läbipaine = varda elastse joone Pöördenurk = elastse joone puutuja (telje) siire telje ristsihis (vB) tõusunurk (B) Painutatud konsool Konsooli ...
Eksamiküsimused Staatika, kinemaatika ja dünaamika 1. Mida nimetatakse jõuks? Jõud on vektoriaalne suurus, mis väljendab ühe materiaalse keha mehaanikalist toimet teisele kehale ja mille tulemuseks on kas kehade liikumise muutus või keha osakeste vastastikuse asendi muutus (deformatsioon). 2. Mis on jõu mõjusirge? Sirget, mida mööda on jõud suunatud, nim jõu mõjusirgeks. Jõu mõjusirge saadakse jõuvektori sirge pikendamisel mõlemale poole. 3. Mida nimetatakse absoluutselt jäigaks kehaks? Absoluutselt jäigaks kehaks nim sellist keha, mille mistahes kahe punkti vaheline kaugus jääb alati muutumatuks. 4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks? Kui ühe jõusüsteemi võib asendada teisega nii, et keha liikumises või tasakaalus mitte midagi ei muutu, siis neid jõusüsteeme nim ekvivalentseteks. 5. Millal võib kahte jõusüsteemi n...