VEKTORARVUTUS 1. Vektori komponendid Erinevalt skalaarist on vektoril peale suuruse määratud ka suund. Vektori suurust nimetatakse tema absoluutväärtuseks. On olemas vaid üks vektor, millel pole suunda nullvektor. Vektorid on võrdsed, kui on võrdsed nende absoluutväärtused ja suunad. Olenemata suunast on ühikvektori absoluutväärtus 1. Siin ja edaspidi kasutame vektori tähistamiseks noolekest tähise peal. Nii kujutab a vektorit, aga a sellesama vektori absoluutväärtust. z k j y i x Cartesiuse koordinaadistik ja teljesuunalised ühikvektorid. Geomeetriliselt saab vektorit kujutada noolena, mis näitab vektori suunda ja mille pikkus vastab vektori absoluutväärtusele. Vektori komponentideks nimetatakse tema projektsioone koordinaattelgedel, mis on läbi korr...
Vektorid Skalaarsed ja vektoriaalsed suurused Suurusi mis on kirjeldatavad üksnes arvulise väärtusega nagu aeg, lõigu pikkus, kujundi pindala jne, nim skalaarseteks suurusteks ehk skalaarideks. Suurusi mille iseloomustamiseks on vaja teada peale arvulise väärtuse ka suunda nagu jõud, kiirus jne, nim vektoriaalseteks suurusteks ehk vektoriteks. Vektori pikkus Iga vektorit võime geomeetriliselt kujutada kindla pikkuse ja suunaga sirglõiguna. Vektori pikkuseks ehk moodduliks nim vektori kui lõigu pikkust. *Vektorit, mille moodul võrdub ühega nim ühikvektoriks. Nullvektoriks nim vektorit mille alguspunkt ja lõpp-punkt ühtivad. Vektorite võrdsus Kaht vektorit nim võrdseteks kui nad on võrdse pikkusega ja samasuunalised ja vektorite võrdsus erineb lõikude võrdsusest. Vabavektor- see on veektorid mille alguspunkti valik ei ole millegagi kitsendatud. Vektorite kollineaarsus ja komplanaarsus Vektoreid nim kollineaarseteks, kui peale ühisesse alg...
Sirged ja tasandid Joonte ja pindade võrrandite mõiste Võrdust F(x,y,z)=0 nim pinna S võrrandiks antud koordinaatide süsteemis, kui selle pinna kõikide punktide koordinadid rahuldavad seda võrdust ja nende punktide koordinadid, mis ei asu sellel pinnal, ei rahulda seda võrdust. Sfäär on niisuguste punktide hulk, milliste kaugus keskpunktist on võrdne raadiusega r. Tähistades sfääri meelevaldse punkti M koordinadid (x,y,z) ning avaldades võrduse |OM| =r koordinatide kaudu. Võrdust (x-a)² + (y-b) ² + (z-c)² = r² nim sfääri võrrandiks vaadeldavas koordinaatide süsteemis. Kui pinna võrrand on esitatav kujul F(x,y,z)=0, kus F(x,y,z) on n-astme polünoom, siis nim pinda n-järku algebraliseks pinnaks. Algebralistest pindadest lihtsaim on esimest järku pind ehk tasand. Sfäär on teist järku pind, sest selle võrrandis esinevad tundmatud on teisel astmel.Võrdust F(x,y)=0 nim joone L võrrandiks antud koordinaatide süsteemis tasandil, kui teda rahuld...
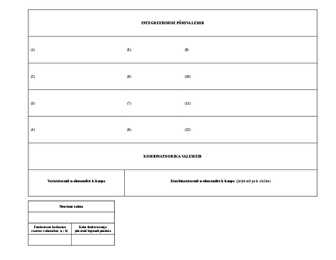
INTEGREERIMISE PÕHIVALEMID (1) (5) (9) (2) (6) (10) (3) (7) (11) (4) (8) (12) KOMBINATOORIKA VALEMEID Variatsioonid n-elemendist k-kaupa Kombinatsioonid n-elemendist k-kaupa (järjekord pole oluline) Newtoni valem Funktsiooni keskmine Kahe funktsiooniga väärtus vahemikus [a ; b] piiratud kujundi pindala Lineaarne 1. järku DV DIFERENTSIAALVÕRRANDID ...
1. Mida uurib klassikaline füüsika ja millistest osadest ta koosneb? Uurib aine ja välja kõige olulisemaid omadusi ja liikumise seadusi. Füüsikaline seos, katse, hüpotees, mudel Klassikaline füüsika koosneb staatikast, kinemaatikast ja dünaamikast. 2. Mis on täiendusprintsiip? Tooge näide! ükski uus teooria ei saa tekkida täiesti tühajele kohale. Vana teooria on uue teooria piirjuhtum. Nii on omavahel seotud erinevad valdkonnad. Puudub kindel piir valdkondade vahel. Nt. Einsteini relatiivsusteooria täiendas Galilei koordinaatide teisendusi väga suurte kiiruste korral. 3. Mis on mudel füüsikas? Tooge kaks näidet kursusest. mudel on keha või nähtuse kirjeldamise lihtsustatud vahend, mis on varustatud matemaatilise tõlgendusega. füüsikaline mudel võimaldab kirjeldada füüsikalise objekti või nähtuse antud hetkel vajalikke omadusi lihtsustatult. näited: punktmass, ideaalse gaasi mudel 4. Mis on mateeria ja millised on tema osad? Mateeria ...
Crameri teoreem lineaarsete võrrandisüsteemide lahendamiseks See teoreem kehtib meelevaldsete lineaarsete võrrandisüsteemide lahendamiseks, kus võrrandite ja tundmatute arvud on võrdsed. Lisaks peavad võrrandisüsteemid olema korrastatud. Kui lineaarse võrrandisüsteemi maatriksi determinant on nullist erinev, siis avalduvad tundmatud murdudena, mille nimetajaks on süsteemi maatriksi determinant ja mille lugejad on maatriksi, mis saadakse süsteemi maatriksist vastava tunmatu kordajate veeru asendamisel vabaliikmete veeruga, determinandid. Kui maatriks täidab Crameri teoreemi eeldusi, siis öeldakse, et tegemist on Crameri peajuhtumiga. Seega Crameri peajuhtumil 1) m=n, 2) |A| 0. Tähendab, Crameri peajuhul on lineaarsel võrrandisüsteemil üksainus lahend, mis avaldub valemitega x1=|A1|/|A| x2=|A2|/|A| .. xn=|An|/|A| Determinantide omadused, determinandi arendus rea (veeru) järgi Omadus 1. Transponeerimisel (r...
Kõrgema matemaatika kordamisküsimused eksamiks 1. Kahe vektori skalaar- ja vektorkorrutis Vektoriks nim suunaga ja pikkusega sirglõiku. Tähistatakse , kus A ja B tähistavad vastavalt vektori algus- ja lõpp-punkti. Vektori mooduliks nim vektori pikkust. Tähistatakse . Ühikvektoriks nim vektorit, mille pikkus võrdub ühega. . Nullvektoriks nim vektorit, mille alguspunkt ja lõpppunkt ühtivad. . Vabavektoriks nim vektorit, mille alguspunkt ei ole fikseeritud, st vektori asendit võib paralleellükke abil muuta. Kahte vektorit nim võrdseks, kui nad on võrdsete moodulitega ning samasuunalised. Vektorite võrdsus erineb lõikude võrdsusest. Vektoreid nim kollineaarseteks, kui nad pärast ühisesse alguspunkti viimist asuvad ühel ja samal sirgel. Võivad olla sama või vastassuunalised. . Vektoreid nim komplanaarseteks, kui nad pärast ühisesse alguspunkti viimist asuv...
1. Kompleks arvude põhimõiste,põhilised definatsioonid. K.arvude liitmine,korrutamine,jagamine algebralisel kujul. DEF. k.arvuks nim. Arvufoori (a,b) kus a,bR. esitatakse z=a+bi (a-reaalosa,b- imaginaar osa,i- imaginaar ühik). Põhimõiste olgu z1=a1+b1i,z2=a2+b2i z1=z2 kui a1= a2 ja b1=b2, z=0 kui a=0 ja b=0,k-arvu z1=a1-b1i nim.kaas k-arvuks z1=a1+b1i. Arvutamine z1+z2= (a1+a2)+(b1+b2)i, z1-z2= (a1-a2)+(b1-b2), z1*z2= (a1+b1i)*(a2+b2), 2. K.geomeetriline kujutamine, trigonomeetriline kuju.korrutamine ja jagamine trigonomeetrilisel kujul. geomeetriline kujutamine k-arv/reaalarvu paar (a,b).saab k-arvu z=a+bi kujutada xy tasandil kus kordinaadid a-reaal osa, b- imaginaar osa ja vastavalt X-telg k-arvu reaal telg ja Y-telg imaginaar telg.XY tasandi iga punkt M(x,y) ongi z=x+iy trigonomeetriline kuju tähistame nurk X-teljel ja vektori pikkus r ,siis a=rcos ja b=rcos.avaldist z=r(cos+isin) ongi trigon...
3. Mis on mudel füüsikas? Tooge kaks näidet kursusest. Mudel on keha või nähtuse kirjeldamise lihtsustatud vahend, mis on varustatud matemaatiliste võrranditega. Mudel võimaldab kirjeldada füüsikalise obiekti antud hetkel vajalikke omadusi tõsiteaduslikult. Näiteks: ainepunkt, absoluutselt elastne keha 14. Mis on vektorite vektorkorrutis? Joonis ja kaks näidet kursusest. 18. Lähtudes kiirenduse ja kiiruse definitsioonist, tuletage liikumisvõrrand. 38. Tõestage, et isoleeritud süsteemi koguenergia on jääv, lähtudes alljärgnevast süsteemi määratlusest. 65. Kasutades alljärgnevat joonist, tuletage harmooniliselt võnkuva keha võrrand so. liikumisvõrrand ja perioodi arvutamise valem. 93. Lähtudes alljärgnevatest seostest, tuletage Boltzmanni jaotusseadus. Ellimineerige ka gaasi universaalkonstant.
MLF 1121 Geofüüsikaline hüdrodünaamika (Matemaatika ülevaade I) Jüri Elken Kursuses vajalik matemaatika Lineaarne algebraliste võrrandite süsteem Olgu n tundmatuga m võrrandist koosnev süsteem a11 x1 + a12 x 2 + ... + a1n x n = f 1 a 21 x1 + a 22 x 2 + ... + a 2 n x n = f 2 ................................... a m1 x1 + a m 2 x 2 + ... + a mn x n = f m maatrikskujul AX = F , a11 a12 ... a1n a a 22 ... a 2 n kus A = 21 , ... ... ... ... a am2 ... a mn m1 x1 f1 x ...
Kompleksarvud Kompleksarvu mõiste. Kompleksarve on kombeks tähistada väikese tähega z. Kompleksarvudel on mitmeid esitusviise ehk kujusid. Kõige levinum on kompleksarvu algebraline kuju. Def Kompleksarvuks (algebralisel kujul) nimetatakse arvu z = a + ib, kus a ja b on reaalarvud ja i on imaginaar ühik. Imaginaarühik, mida tähistatakse i, defi'kse võrdusega i2 = -1.Kõigi kompleksarvude hulka tähistatakse C. Def Kompleksarvu z = a + ib C korral nim arvu a R selle kompleksarvu reaalosax ja arvu b R nim selle kompleksarvu imaginaarosaks. Kaks kompleksarvu on võrdsed parajasti siis, kui 1) on võrdsed nende reaalosad, 2) on võrdsed nende imaginaarosad. Algebraline kuju on kompleksarvu kujudest kõige levinum. Kuid on ka teisi esitusviise. Kompleksarve nim arvudex, sest nendega saab sooritada aritmeetilisi tehteid: liitmist, lahutamist, korrutamist, jagamist. Komar liitmine ja lahutamine on kõige otstarbekam teha algebralisel kujul. Def. Ko...
ANALÜÜTILINE GEOMEETRIA RUUMIS, VEKTORID VEKTORI MÕISTE, MOODUL JA SUUND Neid suurusi, mida on võimalik iseloomustada ühe arvuga, nimetatakse skalaarseteks (temperatuur, mass, töö). Suurusi, mille iseloomustamiseks on vaja arvu ja suunda, nimetatakse vektoriaalseteks (jõud, kiirus, kiirendus). Definitsioon. (Geomeetriliseks) vektoriks nimetatakse suunatud sirglõiku, lõiku, millel tehakse vahet alguse ja lõpu vahel. Kui vektori algus on punktis A ja lõpp punktis B, siis tähistatakse AB , a . Vektor on kindla sihi, suuna ja pikkusega lõik. Siht on teda kandva sirge siht. Suund on alguspunktist lõpp-punkti poole. Definitsioon. Vektori mooduliks nimetatakse tema pikkust, see on lõigu AB pikkust ja tähistatakse AB AB , a a . Vektori moodul on skalaarne mittenegatiivne suurus. Definitsioon. Nullvektoriks nimetatakse vektorit, mille algus- ja lõp...
Crameri peajuhtumi korral Maatriksite jagamisest ei saa on suunatud lõik. Tehted avalduvad lin. Võrrandi süsteemi rääkida! vektoritega: Summa, vahe, tundmatud murdudena, mille 1. Maatriksi astak, selle korrutamine skalaariga (arvuga) nimetajates on süsteemi maatriks leidmine. Näide Koordinaatidega antud vektorid, determinant , lugejas maatriks kus Kui maatriksis leidub vähemalt tehted nendega Olgu antud tundmatute veerg on asendatud üks nullist erinev r –järku miinor, vektorid a1, a2, ..., ak. Siis iga vabaliikmetega, determinant. kuid mitte ühtegi nullist Erinevat vektorit b kujul b _ a1a1 _ a2a2 Determinantide omadused, kõrgemat järku miinorit, siis _. . ._akak, kus a1, a2, . . . , ak on determinandi arendus rea (veeru) ...
1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega: Maatriksi järk tähistab maatriksi mõõtmeid: A on m*n järku maatriks. Liigid: · Ruutmaatriks (m=n) · Diagonaalmaatriks ruutmaatriks, mille peadiagonaalis arvud, muud elemendid 0-d. · Ühikmaatriks diagonaalmaatriksi erijuht. Peadiagonaali elemendid 1-d. Täh E. · Nullmaatriks kõik nullid. Täh . 2. Tehted maatriksitega (korrutamine arvuga, liitmine, lahutamine, korrutamine). · Korrutamine arvuga: korrutades maatriksit reaalarvuga, muutuvad kõik elemendid, selle arvu korra suuremaks. · Maatriksite liitmine: mõõtmed peavad olema samad. Ühemaatriksi elemendid liidetakse teise maatriksi vastavate elementidega: A = (a ij) ja B = (bij) A+B =(cij) kus cij =...
Jõu sidemed ja nende süsteemid J'ika keha nim vabaks kui teda saab antud asendist üle viia mistahes uude asendisse. tingimusi mis kitsendavad keha liikumist nim. sidemeteks. Sideme reakt. on suuantud vastupidiselt suunale milles side takistab keha liikumist. Kuna reakt. jõud ilmnevad alles kehade tegelikult toimuvate jõudude mõjul siis nim neid kak passiivseteks jõududeks. Aktiivsete jõudude allkõistame aga kõiki neid jõude mis ei ole reakts. jõu. Kolme mitteparalleelse jõu tasakaalutingimused - Kolm mitteparal. jõudu on tasakaalus siis ja ainult siis kui nende mõjusirged lõikuvadühes punktis. et neist saab moodustada kinnise hulknurga kindlaümberkäigu suunaga. Et jõudude hulknurga saab moodustada üksnes ühes tasapinnas olevate jõudude puhul siis ilmselt mitu mitte tasapinnas asuvat jõudu taskaalus olla ei saa. Jõu lahutamine komponentideks - Jõu asendamist temaga ekvivalentse jõusüsteemiga nim. jõu lahutamiskes komponentideks. Koondu...
Jõu sidemed ja nende süsteemid J'ika keha nim vabaks kui teda saab antud asendist üle viia mistahes uude asendisse. tingimusi mis kitsendavad keha liikumist nim. sidemeteks. Sideme reakt. on suuantud vastupidiselt suunale milles side takistab keha liikumist. Kuna reakt. jõud ilmnevad alles kehade tegelikult toimuvate jõudude mõjul siis nim neid kak passiivseteks jõududeks. Aktiivsete jõudude allkõistame aga kõiki neid jõude mis ei ole reakts. jõu. Kolme mitteparalleelse jõu tasakaalutingimused - Kolm mitteparal. jõudu on tasakaalus siis ja ainult siis kui nende mõjusirged lõikuvadühes punktis. et neist saab moodustada kinnise hulknurga kindlaümberkäigu suunaga. Et jõudude hulknurga saab moodustada üksnes ühes tasapinnas olevate jõudude puhul siis ilmselt mitu mitte tasapinnas asuvat jõudu taskaalus olla ei saa. Jõu lahutamine komponentideks - Jõu asendamist temaga ekvivalentse jõusüsteemiga nim. jõu lahutamiskes komponentideks. Koondu...
1.Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Süsteemi maatriks ja laiendatud maatriks. Lineaarseks võrrandisüsteemiks nimetatakse lõplikust arvust lineaarseist võrrandeist koosnevat a11 x1 + a12 x 2 + ...a1n xn = b1 süsteemi. Tema üldkuju on: (3) a 21 x2 + a 22 x 2 + ...a 2 n x n = b2 Arve a ij nimetatakse võrrandisüsteemi .................... a m1 x1 + a m 2 x 2 + ...a mn x n = bm kordajateks, arve b1 , b2 ,..., bm aga süsteemi vabaliikmeteks. Arve c1 , c 2 ,..., c n , mis rahuldavad süsteemi kõiki võrrandeid, nimetatakse võrrandisüsteemi lahendiks. Lineaarse võrrandisüsteemi (3) kordajatest moodustatud maatriksit nimetatakse süsteemi (3) maatriksiks. Maatriksi A täiendamisel vabaliikmete veeruga tekkinud maatriksit nimetatakse süsteemi (3) laiendatud maatriksiks. 2. ...
1. Kuidas leida kahe vektori liitmisel tekkiva vektori pikkust kui on teada liidetavate vektorite pikkused. Liidetavad vektorid on: a) samasuunalised; b) vastassuunalised; c) üksteisega risti ? a) Kui vektorid on samasuunalised, siis liitmiseks tuleb nad üksteise otsa panna. b) Kui vektorid on vastassuunalised, siis liitmiseks tuleb nad lahutada. c) Kui vektorid on risti, tuleb liitmiseks kasutada rööpküliku reeglit ( vektorite alguspunktid paigutatakse nii, et alguspunktid ühtivad. Kui soovitakse rohkem kui kahte vektorit kokku liita, tuleb kasutada kolmnurga reeglit; uue vektori algupunkt pannakse eelmise vektori lõpp-punkti. Tuleb arvestada suundasid, saab kuitahes palju vektoreid kokku liita) 2. Kuidas peavad olema vektorid suunatud, et nende: a) skalaarkorrutis oleks 0; b) vektorkorrutis oleks 0 ? a) Selleks et skalaarkorrutis oleks null peavad vektorid risti olema. b) Selleks et vektorkorrutis oleks null peab vektorid olema samasi...
Kõrgem matemaatika 1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks ristkülikukujuline arvudega tabel, milles on m-rida ja n-veergu. Tähistused: (maatriksit tähistatakse suure tähega) a11 a12 ... a1n a 21 a 22 ... a2n i =1,2,..., m = A( aij ), ... ... ... ... j =1,2,..., n a m1 am2 ... a mn Maatriksi järk tähistab maatriksi môôtmeid; A on m*n järku maatriks. Maatriksi liigid: 1) Ruutmaatriks: m=n; 2) Diagonaalmaatriks: a11, a22, amm - peadiagonaal (diagonaalil ei ole 0; muud elemendid 0-d); 3) Ühikmaatriks (diagonaalmaatriksi erijuht): a11 = a22 ... = amm = 1; (Täh. E); 4) Nullmaatriks: aij = 0, iga i ja j korral; (Täh ). 2. Tehted maatriksitega (korrutamine arvuga, liitmine, lahutamine, korrutamine). 1) Korrutamine arvuga: A=(aij), kR; kA=C; C=(cij), kus cij = kaij. 2) Maatriksite liit...
Eksami kordamisküsimused Lineaaralgebra ja analüütiline geomeetria (2015- 2016 aasta sügis) Ristkoordinaadid. Kui ruumis on antud ristkoordinaadisüsteem, siis ruumi iga punkt P on üheselt määrastud ristkoordinaatidega x, y, z, kus x on punkti P ristprojektsioon abstsissteljele, y on punkti P ristprojektsioon ordinaatteljele ja z on punkti P ristprojektsioon aplikaateljele. Kirjutame P(x, y, z). Kahe punkti vaheline kaugus. Kui P1(x1, y1, z1), P2(x2, y2, z2) on ruumi punktid, siis kaugus d punktide P1 ja P2 vahel on määratud valemiga Vektori mõiste Vektor on suunatud lõik alguspunktiga punktis A ja lõpp-punktiga punktis B. Nullvektor Eukleidilises ruumis (näiteks tasandil) on nullvektoriks määramata suunaga vektor, mille pikkus on null. Ühikvektor Kui vektori pikkus on 1, siis teda nimetatakse ühikvektoriks. Vektorite liitmine ja lahutamine Lahutamine toimub sama põhimõtte järgi. Reaalarvu ja vektori korrutis. Vektori pikk...
Küsimused YFR0011 kordamiseks ja eksamiks. 1. Mida uurib klassikaline füüsika ja millisteks osadest ta koosneb? Füüsika uurib aine ja välja kõige üldisemaid omadusi ja liikumise seadusi. Füüsika ei uuri ennustamist, hiromantiat, astroloogiat...Füüsika valdkonda kuuluvad: Kvantmehaanika, relativistlik kvantmehaanika, Newtoni ehk klassikaline mehaanika, erirelatiivsusteooria, üldrelatiivsusteooria. 2. Mis on täiendusprintsiip? Ükski uus teooria ei saa tekkida täiesti tühjale kohale. Vana teooria on uue teooria piirjuhtum Nii on omavahel seotud erinevad valdkonnad. Puudub kindel piir valdkondade vahel. 3. Mis on mudel füüsikas? Tooge kaks näidet kursusest. Mudel on keha või nähtuse kirjeldamise lihtsustatud vahend, mis on varustatud matemaatiliste võrranditega. Mudel võimaldab kirjeldada füüsikalise objekti antud hetkel vajalikke omadusi tõsiteaduslikult. (Absoluutselt elastne keha, absoluutselt mitteelastne keha, absoluutselt jäik keha, ...
1.*** Mida uurib klassikaline füüsika ja millistest osadest ta koosneb? Mis on täiendusprintsiip? Mis on mudel füüsikas? Tooge kaks näidet kursusest. Uurib aine ja välja omadusi ja liikumise seadusi. Klassikaline füüsika koosneb staatikast, kinemaatikast ja dünaamikast. Niels Henrik David Bohr (1885 1962, Taani, Nobeli preemia 1922): Ükski uus teooria ei saa tekkida täiesti tühjale kohale. Vana teooria on uue teooria piirjuhtum. Nii on omavahel seotud erinevad valdkonnad. Puudub kindel piir valdkondade vahel. Mudel on keha või nähtuse kirjeldamise lihtsustatud vahend, mis on varustatud matemaatilise tõlgendusega. näiteks: punktmass, ideaalse gaasi mudel, absoluutselt elastne keha, ainepunkt. 2.Mis on mateeria ja millised on tema osad? Mis on ruum ja aeg? Mida tähendab aja ja ruumi homogeensus? Loetlege vastastikmõjud tugevuse kahanemise järjekorras. ...
KORDAMISKÜSIMUSED 2015/2016 Kõrgem matemaatika MTMM. 00.145 (6EAP) 1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega. Kui aij on reaalarvud ning i = 1; 2;...;m ja j = 1; 2;...; n, siis tabelit: nimetatakse täpsemalt (m x n)-maatriksiks ja kasutatakse tähistusi Am x n või Amn. Arvupaari (m; n) nimetatakse maatriksi A mõõtmeteks. Tabelis paiknevaid arve aij nimetatakse maatriksi elementideks. i reaindeks; j veeruindeks. reamaatriks (1 x n); veerumaatriks (m x 1); ruutmaatriks m = n Tähistused: maatriksi järk naturaalarvude paar m x n (ridade ja veergude arv). ruutmaatriksi korral järk n (n = ridade arv = veergude arv). maatriksi liigid: nullmaatriks kõik elemendid 0. tähistus teeta ...
1.Skalaarid ja vektorid - Suurused (ntx aeg ,mass,inertsmom),mis on määratud üheainsa arvu poolt. Seda arvu 3.Ühtlaselt muutuv ringliikumine - Nurkkiirus pole konstantne sellepärast et on olemas nurkkiirendus ,mille nim antud füüsikalise suuruse väärtuseks.Neid suurusi aga skalaarideks.Mõnede suuruste määramisel on lisaks väärtusele vaja näidata ka suunda (ntx jõud ,kiirus,moment).Selliseid füüs suurusi nim vektoriteks.Tehted: a) vektori * skalaariga av-=av-- b)v liitm v=v1+v2 c)kahe vektori skalaarkorrutis on skalaar, mis on võrdne nende vektor on nurkkiiruse vektoriga samasuunaline e aksiaalvektor. ...
1. Skalaarid ja vektorid - Suurusi(aeg, mass, inertsmoment), mille määramiseks piisab üheainsast arvväärtusest, nimetatakse skalaarideks. Suurusi, mida iseloomustab arvväärtus(moodul) ja suund, nimetatakse vektoriteks. Tehted vektoritega: a)Vektori korrutamine skalaariga. av = av Vastuseks uue pikkusega, kuid samasuunaline vektor. b)Vektorite liitmine. v=v1+v2 Vastuseks uus vektor, ei olene vektorite järjekorrast. c)Kahe vektori skalaarkorrutiseks nimetatakse skalaari, mis on võrdne nende vektorite moodulite ja nendevahelise nurga koosinuse korrutamisega.v1v2cosα=vˉˉ1∙vˉˉ2 d)Kahe vektori vektorkorrutis on vektor, mille moodul on võrdne vektorite moodulite ja nendevahelise siinuse korrutisega, siht on risti tasandiga, milles asuvad korrutatavad vektorid ja suund on määratud parema käe kruvi järgi. v1xv2sinα=vˉˉ1∙vˉˉ2 2. Kinemaatika - a)Ühtlane kulgliikumine v=s/t=...
Kordamisküsimused 1) Kompleksarvu mõiste. Kompleksarvu algebraline kuju ja tehted algebralisel kujul. DEF. k.arvuks nim. Arvufoori (a,b) kus a,bR. esitatakse z=a+bi (a-reaalosa,b-imaginaar osa,i- imaginaar ühik). Põhimõiste olgu z1=a1+b1i,z2=a2+b2i z1=z2 kui a1= a2 ja b1=b2, z=0 kui a=0 ja b=0,k- arvu z1=a1-b1i nim.kaas k-arvuks z1=a1+b1i. Arvutamine z1+z2= (a1+a2)+(b1+b2)i, z1-z2= (a1-a2)+(b1-b2), z1*z2= z 1 ( a1 +b 1 i ) (a 2+b 2 i) (a1+b1i)*(a2+b2), = z 2 ( a2 +b 2 i ) (a 2+b 2 i) 2) Kompleksarvu trigonomeetriline kuju ja tehted trigonomeetrilisel kujul. geomeetriline kujutamine k-arv/reaalarvu paar (a,b).saab k-arvu z=a+bi kujutada xy tasandil kus kordinaadid a-reaal osa, b- imaginaar osa ja vastavalt X-telg k-arvu reaal telg ja Y- telg imaginaar telg.XY tasandi iga punkt M(x,y) ongi z=x+iy ...
Füüsikalise looduskäsitluse alused Füüsika üldmudelid Füüsikalised objektid ja suurused • Füüsika üldmudelid: • - keha (kindlad piirjooned, mõõtmed, mass) • -- punktmass (keha mass koondununa ühte punkti) • - füüsikalised suurused (kirjeldab mingi loodusobjekti ühte kindlat omadust) • Füüsikalised objektid on olemas objektiivselt, st sõltumatult mistahes vaatlejast või koguni inimkonnast tervikuna. • Füüsikalised suurused on vaatlejate ühised kujutlused, üldmudelid, mille abil on mugav füüsikalisi objekte kirjeldada. Füüsikalised objektid ja suurused • Väljad – mitteainelised objektid, mõjutavad kehi ja omavad energiat, ei saa kasutada ruumi ja aja mõistet. • Kehad – ainelised objektid, saab uurida nende kuju, värvust, mõõtmeid, koostist, omavahelist liikumist, vastastikmõju, saab kasutada ruumi ja aja mõisteid. • Nähtused – aineliste ja väljeliste objektidega toimuvad muutused. Füüsi...
1. Ristkoordinaadid- kui ruumis on antud ristkordinaadisüsteem, siis ruumi iga punkt P on üheselt määratud ristkordinaatidega x,y,z, kus x on punkti P ristprojektsioon absissteljele, y on punkti P ristprojektsioon ordinaattelele ja z on punkti P ristprojektsioon aplikaattelele P(x,y,z) 2. Kahe punkti vaheline kaugus- Kui P1(x1,y1,z1), P2(x2,y2,z2) on ruumi punktid siis kaugus d punktide P1 ja P2 vahel on määratud valemiga √ 2 2 d= ( x 2−x 1 ) + ( y 2− y 1 ) + ( z 2 + z 1) 2 3. Vektori mõiste-Vektor on suunatud lõik millel on kindel algus- ja lõpp-punkt. 4. Nullvektor-Vektorit, mille pikkus on null, nimetatakse nullvektoriks ja tähistatakse sümboliga . Nullvektori suund on määramata. 5. Ühikvektor- Kui vektori pikkus on 1 6. vektorite liitmine-rööpkülikureegel: Vektorite a ja b summaks nimetatakse niisugust v...
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z...
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z...
1. Vektorarvutused. 1. Murdmaasuusataja sõidab 1.00 km põhja poole ja siis 2.00 km itta. Maa on horisontaalne. Kui kaugel ja mis suunas asub ta lähtepunktist? Lahendus: Skeem.... Phytagorase teoreemi järgi saame kauguse - Ja nurga tangensi definitsiooni järgi leiame nurga Vastus: Suusataja kaugus alguspunktist on 2,24 km ja ta asub 63,4⁰ põhjast itta (võib ka öelda 90: - 63,4: = 26,6⁰ idast põhja) 2. Vektori pikkus on 3.00 m ja ta on suunatud x-teljest 45˚ päripäeva. Kui suured on selle vektori x- ja y-komponendid? Lahendus: Joonis Komponentide leidmiseks kasutame Valemeid ja kus D on vektori pikkus ja α vektori ja tema kompo...
1.Mida uurib klassikaline füüsika ja millistest osadest ta koosneb? Mis on täiendusprintsiip? Mis on mudel füüsikas? Tooge kaks näidet kursusest. Uurib aine ja välja kõige olulisemaid omadusi ja liikumise seadusi. Füüsikaline seos, katse, hüpotees, mudel. Klassikaline füüsika koosneb staatikast, kinemaatikast ja dünaamikast. Niels Henrik David Bohr (1885 -1962, Taani, Nobeli preemia 1922): Ükski uus teooria ei saa tekkida täiesti tühjale kohale. Vana teooria on uue teooria piirjuhtum. Nii on omavahel seotud erinevad valdkonnad. Puudub kindel piir valdkondade vahel. Mudel on keha või nähtuse kirjeldamise lihtsustatud vahend, mis on varustatud matemaatilis...
1.Skalaarid ja vektorid:Suurusi mille määramiseks piisab ainult arvväärtustest,nimetatakse skalaarideks. 18.Harmooniliste võnkumiste liitmine: -Kahe (aeg,mass,inertsimoment jne) Suurusi ,mida ühesuguse sagedusega(),samasihiliste,kuid erinevate iseloomustab arvväärtus(moodul) ja suund, nimetatakse amplituudidega ja algfaasidega võnkumise liitmisel on 31.Molekulaarkineetilise teoooria põhivõrrand: all vektoriks.1.Vektori korrutamine skalaariga: summaks jäle sama sagedusega harmooniline mõistetakse avaldist,mis seob gaasi molekulide 2.Vektorite liitmine: võnkumine.-Kahe samasihilise,kuid erineva sagedusega kineetilise energia gaasi rõhu ja ruumalaga.Molekulide 3.Vektorite skalaarne korrutamine: kahe vektori harmoonilise võnkumise liitmisel on tulemuseks keskmise kinetilise energia s...
FÜÜSIKA I PÕHIVARA Põhivara on mõeldud üliõpilastele kasutamiseks õppeprotsessis aines FÜÜSIKA I . Koostas õppejõud P.Otsnik Tallinn 2003 2 1. SISSEJUHATUS. Mõõtühikud moodustavad ühikute süsteemi. Meie kasutame peamiselt rahvusvahelist mõõtühikute süsteemi SI ( pr.k. Syste`me Internatsional) mis võeti kasutusele 1960 a. Selle süsteemi põhiühikud on : meeter (m), kilogramm (kg) , sekund (s), amper (A), kelvin (K), kandela (cd) ja mool (mol). Skalaarid ja vektorid. Suurusi , mille määramiseks piisab ainult arvväärtusest,nimetatakse skalaarideks. Näiteks: aeg , mass , inertsmoment jne. Suurusi , mida iseloomustab arvväärtus (moodul) ja suund , nimetatakse vektoriks. Näiteks: kiirus , jõud , moment jne. Vektoreid tähistatakse sümboli kohal oleva noolekesega v , F . Tehted vektoritega: 1. Vektori korrutamine skaalariga. av = av 2. Vektorite liitmine. ...
TÄIENDÕPPE KORDAMISKÜSIMUSED NB! Kontrolltöös teoreetiliste küsimuste vastustes kirjutatud valemite korral tuleb selgitada kasutatud sümbolite tähendust. Joonistele tuleb kanda peale ka füüsikaliste suuruste sümbolid. 1. Ühtlase liikumise definitsioon. Ühtlane liikumine liikumine, mille korral keha läbib mistahes võrdsete ajavahemike vältel võrdsed teepikkused. 2. Ühtlase liikumise kiiruse valem ja ühikud. [] = [] = =1 [] 3. Kiiruste liitmise seadus paralleelsete ja ristuvate kiiruste korral. Omavahel ristuvad kiirused liidetakse Pythagorase teoreemi kasutades: = 12 + 22 samasihilisi kiirusi liidetakse ja lahutakse nagu tavalisi arve, kusjuures märk valitakse vastavalt liidetavate kiiruste suunale: = 1 ± 2 4. Keha hetkkiiruse definitsioon tuletise kaudu. () = = = 0 5. Ühtlaselt muutuva liikumise definitsioon. Ühtlasel...
Mehaaniline liikumine Taustsüsteem. Koordinaadid. Raadiusvektor. Tehted vektoritega. Liikumisvõrrand. Trajektoor. Kulg- ja pöördliikumine. Nihe ja teepikkus. Nurknihe. Ainepunkt-mõnikord võib liikumise uurimisel jätta kehade mõõtmed arvestamata: siis kui need on palju väiksemad kõikidest teistest mõõtmetest, millega antud ülesandes on tegemist. Ainepunkti asukoha ruumis saab määrata raadiusvektori r abil. Punkti liikumisel muutub vektor r üldjuhul nii suuruse kui ka suuna poolest. Taustsüsteem- taustkeha, sellega seotud koordinaadistik ja aja arvestamise alghetk mood. taustsüsteemi. Koordinaadid Keha koordinaadid võimaldavad määrata tema asukohta ruumis. Liikumise kirjeldamisel tuleb arvestada ka aega. Raadiusvektor- Punkti raadiusvektoriks nimetat. koordinaatide alguspunktist antud punkti tõmmatud vektorit . Raadiusvektor r määrab üheselt punkti asukoha ruumis. Vektoriks nim. sellest liiki suurust nagu nihe, s. o. suurus, mida iselo...
I kontrolltöö kordamisküsimused (YFR 0011) 1. Kuidas leida kahe vektori liitmisel tekkiva vektori pikkust kui on teada liidetavate vektorite pikkused. Liidetavad vektorid on o a) samasuunalised; liitmine nt a(2;3;4) + b(2;4;1) = c(4;7;5) o b) vastassuunalised; sama o c) üksteisega risti. 2. Kuidas peavad olema vektorid suunatud, et nende o a) skalaarkorrutis oleks 0; risti o b) vektorkorrutis oleks 0? Samas suunas/ vastassuunas 3. Mis on kohavektor? Mis on nihkevektor? Kuidas nad on omavahel seotud? Kohavektor on vektor, mis on tõmmatud koordinaadi alguspunktist etteantud punkti. Nihkevektor on vektor, mis on tõmmatud liikumise alguspunktist liikumise lõpp-punkti. Nihkevektor on kohavektorite muut, nihkevektor tähistab kohavektori juurdekasvu ajavahemikus delta-t 4. Mis on nihkevektor? Mis on trajektoor? Millal ühtib keha trajektoor nihkevektoriga? Nihkevektor on ...
1.Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Süsteemi maatriks ja laiendatud maatriks. Lineaarse võrrandi all mõistetakse võrrandit kujul a1 x1 + a2 x2 + ... + an xn = b , (1) kus a1 , a2 , ... , an ja b on fikseeritud arvud ning x1 , x2 , ... , xn on tundmatud. Arvu b nimetatakse vaadeldava võrrandi vabaliikmeks, arve a1 , a2 , ... , an aga tema kordajateks. Def. 1. Võrrandi (1) lahendiks nimetatakse selliseid tundmatute x1 , x2 , ... , xn väärtusi c1 , c2 , ... , cn R , et pärast nende paigutamist võrrandi (1) vasakusse poolde tundmatute asemele kehtiks võrdus a1c1 + a2c2 + ... + ancn = b . Võrrandi (1) lahend on n arvust c1 , c2 , ... , cn koosnev järjestatud lõplik jada. Seega saab teda vaadelda aritmeetilise vekt...
Kõrgema matemaatika kordamisküsimused 1. Maatriksi definitsioon. Maatriksi elemendid. Lineaarsed tehted maatriksitega (liitmine ja skalaariga korrutamine). Nullmaatriks. Transponeeritud maatriks 2. Maatriksite korrutise definitsioon. Korrutamise omadused ja seosed lineaarsete tehete ning korrutamise vahel. Ühikmaatriks. 3. Teist ja kolmandat järku determinandid. 4. Permutatsiooni definitsioon. Inversiooni definitsioon. n-järku determinandi definitsioon. Determinandi põhiomadused 5. Maatriksi elemendi minor. Alamdeterminant. Determinandi arendus rea ja veeru järgi. Determinantide teooria põhivalem. 6. Regulaarse maatriksi mõiste. Pöördmaatriksi definitsioon ja elementide leidmise eeskiri. Pöördmaatriksi omadused. 7. Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Vasturääkiv, kooskõlaline, määratu süsteem. Süsteemi maatriks ja laiendatud ma...
10. Kuidas lahutatakse vektoreid komponentideks ja miks see on Leiame seose nende koordinaatide vahel, eeldusel, et aeg kulgeb ühteviisi mõlemas taustsüsteemis st . Aega ...
6variant 1.Ühtlaselt muutuv ringliikumine- Nurkkiirus pole konstantne sellepärast et on olemas nurkkiirendus ,mille vektor on nurkkiiruse vektoriga samasuunaline e aksiaalvektor. 2.Harmooniline võnkumine- nimetatakse mis tahes võnkumist, mida saab kirjeldada siinusfunktsiooni või koosinusfunktsiooni abil. x=A*sin(fi); x-hälve tasakaaluasendist;A-max hälve(võnkumise amplituud);fii-vnkumise faas(fii= t);wnurkkiirus 4variant 1.Mitteühtlaselt muutuv sirgliikumine- See on niisugune liikumine, kus kiirendus ka muutub. Võnkumiseks nim protsesse,milledel on iseloomulik teatud korduvus .Siinuseliselt v 2.Jõumoment- Jõumoment on jõud mida rakendatakse pöördliikumises.Jõumoment on koosinuseliselt toimuvaid füüsikalisi suurusemuutusi ajas nim harm võnk.H v amplituudiks nim suurus, mis on ...
6variant 2 vastastikku ristuva võnkumise liitmisel oleneb tulemus võnkumiste sagedusest ja 1.Ühtlaselt muutuv ringliikumine- Nurkkiirus pole konstantne sellepärast et on faasidest: a) kui võnked on sama sagedusega ja samas faasis, siis summarne olemas nurkkiirendus ,mille vektor on nurkkiiruse vektoriga samasuunaline e liikumine toimub mööda sirget. b) kui võnked on sama sagedusega, kuid faasis aksiaalvektor. nihutatud, siis toimub liikumine mööda ellipsit. c) kui sagedused on erinevad, siis 2.Harmooniline võnkumine- nimetatakse mis tahes võnkumist, mida saab täisarvkordsete sageduste suhete puhul kirjeldavad liitvõnkeid nn Lissajous` kirjeldada siinusfunktsiooni või koosinusfunktsiooni abil. x=A*sin(fi); x-hälve kujundid. tasakaaluas...
6variant 1.Ühtlaselt muutuv ringliikumine- Nurkkiirus pole konstantne sellepärast et on olemas nurkkiirendus ,mille vektor on nurkkiiruse vektoriga samasuunaline e aksiaalvektor. 2.Harmooniline võnkumine-Võnkumiseks nim protsesse,milledel on iseloomulik teatud korduvus .Siinuseliselt v koosinuseliselt toimuvaid füüsikalisi suurusemuutusi ajas nim harm võnk.H v amplituudiks nim keha max hälvet tasakaaluasendist. Võnkuva punkti koguenergia = igal ajahetkel kineetilise energia ja pottesnisaalse summaga. Harmoniline võnkumine on protsess, kus punktmass liigub mööda sirget ning tema asukohta kirjeldav koordinaat(X) muutub ajas siinus(või koosinus) funktsiooni järgi. Harmooniliselt võngubnäiteks ühtlaselt nurkkiirusega() mööda ringjoont liikuva punkti(m 3.Akustika-käsitleb häält ja tema seost teiste füüsikaliste nähtustega..Heli isel kõrgus,tämber ja valjus. Gaasides ja vedelikes levib heli pikilainetel ja tahketes nii piki kui ristil.Helid j...
6variant 2 vastastikku ristuva võnkumise liitmisel oleneb tulemus võnkumiste sagedusest ja 1.Ühtlaselt muutuv ringliikumine- Nurkkiirus pole konstantne sellepärast et on faasidest: a) kui võnked on sama sagedusega ja samas faasis, siis summarne olemas nurkkiirendus ,mille vektor on nurkkiiruse vektoriga samasuunaline e liikumine toimub mööda sirget. b) kui võnked on sama sagedusega, kuid faasis aksiaalvektor. nihutatud, siis toimub liikumine mööda ellipsit. c) kui sagedused on erinevad, siis 2.Harmooniline võnkumine- nimetatakse mis tahes võnkumist, mida saab täisarvkordsete sageduste suhete puhul kirjeldavad liitvõnkeid nn Lissajous` kirjeldada siinusfunktsiooni või koosinusfunktsiooni abil. x=A*sin(fi); x-hälve kujundid. tasakaaluas...
Tallinna Tehnikaülikool YFR0011 Füüsika I eksamiküsimused ja vastused 2011 1. Mida uurib klassikaline füüsika ja millistest osadest ta koosneb? Klassikaline füüsika uurib aine ja välja kõige üldisemaid omadusi ja liikumise seaduspärasusi. Valdkonda kuuluvad kvantme- haanika, relativistlik kvantmehaanika, Newtoni (ehk klassikaline) mehaanika, erirelatiivsusteooria ja üldrelatiivsusteooria. Uurimisprotsess algab vaatlustest/eksperimentidest, jätkub hüpoteesi püstitamisega, selle igakülgse tõestamisega ja lõpuks teadusliku teooria koostamisega. 2. Mis on täiendusprintsiip? Põhimõte, mis väidab, et ükski uus teooria ei saa tekkida täiesti tühjale kohale, vaid tekib vana teooria asemele või selle ül- distuseks. Vana teooria on seega uue teooria piirjuhtum. Nii on omavahel seotud erinevad valdkonnad. 3. Mis on mudel füüsikas? Tooge kaks näidet kursusest. Mudel o...
Ühtlaselt muutuv ringliikumine on ringjooneline liikumine, mille puhul keha kiirus mistahes võrdsetes ajavahemikes muutub võrdse suuruse võrra, st kiirendus on jääv. Nurkkiirus pole konstantne sellepärast, et on olemas nurkkiirendus, mille vektor on nurkkiirusega samasuunaline e aksiaalvektor. Ühtlane ringliikumine keha punktide liikumistrajektooriks on ringjooned, millede keskpunktid asuvad ühel sirgel- pöörlemisteljel . ühtlase ringliikumise korral on nii joonkiirus kui nurkkiirus konstantsed. Ühtlane sirgjooneline liikumine keha või masspunkti sirgjooneline liikumine, mille puhul keha massikese või masspunkt läbib liikumise kestel mis tahes võrdsete ajavahemike jooksul võrdsed teepikkused. Liikumine on ühtlane sirgjooneline parajasti siis kui kiirusvektor ei muutu. Inertsiseaduse järgi säilitab keha või masspunkt oma ühtlase sirghoonelise liikumise, kui talle mõjuvate jõudude resultant on null. Mitteühtlaselt muutuv sirgliik...
Lineaarvõrrandsüsteem-nim. Võrrandisüsteemi kujul {a11x1+..+a1nxn=b1 ; am1x1+.. +amnxn=bm. Arve aij nim lvs kordajateks, arvud b1..bm on vabaliikmed ja x1..xn on tundmatud. Süsteemi võrrandite arv m ja tundmatute arv n on sõltumatud. Sellist võrrandisüsteemi nimetatakse lineaarseks võrrandisüsteemiks, sest otsitavad suurused x1.. xn esinevad ainult lineaarsetes tehetes, st neid on vaid liidetud ja skalaariga korrutatud. Def. Arvude järjendit c1.. cn nim lvs lahendiks, kui tundmatute asendamisel nende arvudega (loomulikus järjekorras, st x1 = c1.. xn = cn) on süsteemi kõik võrrandid rahuldatud. Võrrsüsteemi nim kooskõlaliseks, kui tal leidub vähemalt 1 lahend. Kui lahendid puuduvad, nim sõsteemi vasturääkivaks. Võrrsüs kõigi lahendite hulka nim võrrsüs lahendihulgaks e üldlahendiks. Igal lvs-l kas lahend puudub, on ühene lahend või on lõpmata palju lahendeid. Cramer. Def. Öeldakse, et lvs-i korral on tegemist Crameri peajuhuga, kui 1)tun...
MAATRIKS: Maatriks nimetatakse ümarsulgudesse paigutatud reaalarvude tabelit, milles on eristatavad read ja veerud. Maatriksi mõõtmed Maatriksit, milles on m rida ja n veergu nimetatakse täpsemalt (m,n)- maatriksiks ning arvupaari (m,n) selle maatriksi mõõtmeteks. Maatriksi järk Omadus, mis esineb ainult ruutmaatriksil: Näiteks Mat(n,n) nim. n-järku maatriksiks. Maatriksi elemendid nimetatakse reaalarve, milledest maatriks koosneb. Maatriksi ja maatriksite hulga tähistused Maatrikseid tähistatakse tavaliselt suurte ladina tähtedega: A, B,....X, Y, Z. Maatriksite elemente tähistatakse vastavate väikeste ladina tähtedega, mis võivad olla varustatud ka indeksitega: a, b, c, jne. Kõigi (kõikvõimalike mõõtmetega) maatriksite hulka tähistame edaspidi Mat abil ning kõigi (m, n)-maatriksite hulka tähistame edaspidi Mat(m, n) abil. Ruutmaatriks maatriks, mille ridade arv on võrdne veergude arvuga, s.t. m=n Ristkülikmaatriks maatriks,...
1. Mida uurib klassikaline füüsika ja millisteks osadest ta koosneb? ´Uurib aine ja välja kõige üldisemaid omadusi ja liikumise seadusi. Koosneb: Relativistlik kvantmehaanika, kvantmehaanika, erirelatiivsusteooria, klassikaline mehaanika, üldrelatiivsusteooria. 2. Mis on täiendusprintsiip? Ükski uus teooria ei saa tekkida tühjale kohale. Vana teooria on uue teooria piirjuhtum. Nii on omavahel seotud erinevad valdkonnad. Puudub kindel piir valdkondade vahel. 3. Mis on mudel füüsikas? Tooge kaks näidet kursusest. Mudel on keha või nähtuse kirjeldamise lihtsustatud vahend, mis on varustatud matemaatiliste võrranditega. Mudel võimaldab kirjeldada füüsikalise obiekti antud hetkel vajalikke omadusi tõsiteaduslikult. Näiteks: ainepunkt, absoluutselt elastne keha. 4. Mis on mateeria ja millised on tema osad? Mateeria on kõik meid ümbritsev loodus. Mateeria esineb aine ja välja kujul. 5. Mis on ruum ja aeg? Ruum ja aeg on mateeria ja selle liiku...
1) Mida uurib klassikaline füüsika ja millistest osadest ta koosneb? Füüsika uurib mateeria kõige üldisemaid liikumisvorme ja muundumisi. Ta koosneb staatikast, kinematikast ja dünaamikast. 2) Mis on täiendusprintsiip? Ükski uus teooria ei saa tekkida täiesti tühjale kohale. Vana teooria on uue teooria piirjuhtum. Nii on omavahel seotud erinevad valdkonnad. Puudub kindel piir valdkondade vahel. 3) Mis on mudel füüsikas? Tooge kaks näidet kursusest. Füüsikaline mudel on keha või nähtuse kirjeldamise lihtsustatud vahend, mis on varustatud matemaatilise tõlgendusega. füüsikaline mudel võimaldab kirjeldada füüsikalise objekti või nähtuse antud hetkel vajalikke omadusi lihtsustatult. Näited: punktmass, ideaalse gaasi mudel. 4) Mis on mateeria ja millised on tema osad? Mateeria on kõik meid ümbritsev loodus. Mateeria esineb aine ja välja kujul. 5) Mis on ruum ja aeg? Ruum ja aeg on mateeria ja selle liikumi...