3. PLANETAARREDUKTOR
Planetaarreduktor on automaatkäigukasti
mehaaniline osa, mille kaudu muudetakse
auto vedavatele ratastele antavat pöördemomenti. Planetaarreduktor paikneb
automaatkäigukasti
keres ja koosneb järgmistest osadest:
1) planetaarülekanded, mille kaudu muudetaksegi pöördemomenti (tavaliselt on neid
planetaarreduktoris kaks või kolm);
2)
sidurid , mille kaudu antakse pöördemoment edasi planetaarülekande üksikutele
osadele;
3)
pidurid , mille abil saab planetaarülekande üksikuid osasid kinni hoida;
4) vabajooksusidurid, mis võimaldavad planetaarülekande mõnel osal pöörelda ainult
ühes suunas. 3.1. Planetaarülekanne
Planetaarülekande eelisteks tavalise hammasülekande ees on suurema
pöördemomendi ülekandmine väiksemate mõõtmete juures ning
vedava ja veetava
võlli samatelgsus. Pöördemomenti on võimalik muuta hammasülekannet lahutamata,
mis teeb lihtsaks planetaarülekande
automatiseerimise . Planetaarreduktorites
kasutatakse kaht tüüpi planetaarülekandeid:
1)
tavalised planetaarülekanded,
2) laiendatud planetaarülekanded.
3.1.1. Tavaline planetaarülekanne
Tavaline planetaarülekanne on tänapäeva planetaarreduktorites enamlevinenud.
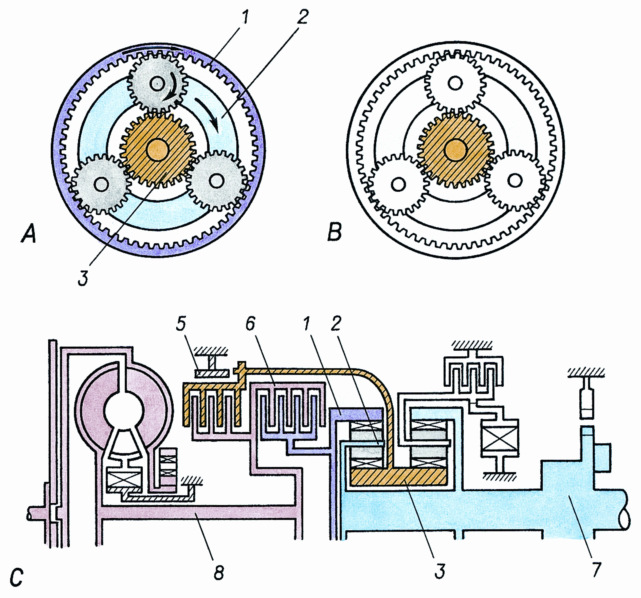
Seetõttu on käesolevas peatükis sellele ka rohkem tähelepanu pööratud. Joonisel 11
on toodud tavalise planetaarülekande põhimõtteline skeem.
Joonis 11.
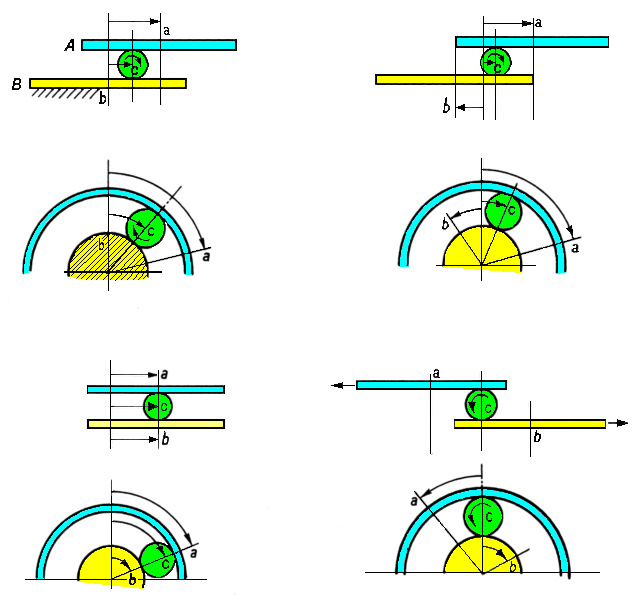
Joonis 12.
A skeem, B üldvaade, 1 kroonratas, 2
satelliidid , 3 päikeseratas, 4 satelliitide raam Joonis 12
12.2 12.1
12.3 12.4
Planetaarülekannete
skeemid : a kroonratta
joonkiirus b päikeseratta joonkiirus,
c satelliitide raami joonkiirus
Pöördemoment antakse sisselülitatud siduri abil ühele planetaarülekande
hammasratastest ja mingi käigu saavutamiseks tuleb reeglina mõnda teist
hammasratast
pidurdada . Joonisel 12 on planetaarülekannet võrreldud kahe
hammaslati ja nende vahel paikneva hammasrattaga. Kui alumist hammaslatti
hoitakse kinni ja ülemist liigutatakse (skeem 12.1), siis
hammasratas nende vahel
liigub kiirusega c, mis on kaks korda väiksem ülemise hammaslati liikumiskiirusest a.
Pidurdades planetaarülekande päikeseratast toimib sama põhimõte ka seal. Vedav võll
ühendatakse kroonrattaga, veetav võll aga satelliitide
raamiga . Ülekandearv ei ole sel
juhul mitte kaks nagu hammaslattide puhul, vaid sõltub ka kroon- ja päikeseratta
hammaste arvust. Selline ülekandeskeem on kasutusel planetaarülekande teisel käigul
(vt 3.5.5).
Skeemil 12.2 alumist hammaslatti ja vastavalt ka päikeseratast mitte ainult ei hoita
kinni, vaid isegi liigutatakse vastupidises suunas. Sel juhul muutub raami kiirus veelgi
aeglasemaks ja järelikult ülekande arv
suuremaks . Sellist ülekandeskeemi on
kasutatud planetaarreduktori esimese käigu puhul (vt 3.5.4). Vedava ja veetava võlli ühendus on sama kui teisel käigul, st vedav võll ühendatakse kroonrattaga, veetav võll
aga raamiga.
Skeemil 12.3 on näidatud otseülekanne, kus pöörlemine antakse võrdselt mõlemale
hammaslatile või nii kroon- kui ka päikeserattale ning satelliitide raam (veetava võlli
rollis) peab nendega koos liikuma. See skeem on kasutusel kolmanda käigu saamiseks
(vt 3.5.6).
Skeemil 12.4 näidatakse tagasikäiku. Vedavaks osaks on alumine hammaslatt või
päikeseratas. Satelliitide raami hoitakse kinni ning ülemist hammaslatti või
kroonratast
sunnitakse liikuma vastupidises suunas. See liikumine antaksegi veetavale
võllile (vt 3.5.2).
Planetaarreduktori ülekandearvu leidmine osutub küllalt tülikaks, sest pöördemoment
kantakse läbi mitme planetaarülekande ning igas ülekandes tuleb arvestada satelliitide
suhtelist liikumist kroon- ja päikeseratta suhtes. Valemi koostamisel aga saab
kasutada üldist seaduspärasust, kus ühe ülekande piirides jääb iga
hammasratta pöörlemissageduse korrutis tema hammaste arvuga konstantseks:
(n kr - n r ) Tkr = n s Ts = (n p + n r ) T p ,
kus n kr on kroonratta pöörlemissagedus;
nr - satelliitide raami pöörlemissagedus;
(n kr - n r ) - kroonratta
tinglik pöörlemissagedus, mis
arvestab satelliitide liikumist
kroonratta suhtes;
Tkr kroonratta hammaste arv;
n s satelliitide pöörlemissagedus;
Ts satelliidi hammaste arv;
n p päikeseratta pöörlemissagedus;
(n p + n r ) päikeseratta tinglik pöörlemissagedus, mis arvestab satelliitide pöörlemist
päikeseratta suhtes;
T p päikeseratta hammaste arv.
Üksikute käikude ülekandearvu leidmiseks tuleb arvestada, et pöördemomenti võib
edasi anda läbi mitme planetaarülekande ja samas ka seda, et mingi hammasratas võib
mõne ülekande puhul olla kinni pidurdatud, st n = 0 (vt 3.5). Näiteks on punktis 3.5
toodud kahe planetaarülekandega kolmekäigulise planetaarreduktori ülekandearvud
järgmised. Esimese käigu ülekandearv: Tp
i1 = 2 + Tkr
kus T p on päikeseratta hammaste arv,
Tkr kroonratta hammaste arv.
Teise käigu ülekandearv: Tp
i2 = 1 + Tkr
Kolmanda käigu ülekandearv:
i3 = 1,0 Tkr
Tagasikäigu ülekandearv: itag = Tp Nagu juba öeldud, on planetaarreduktoris vähemalt kaks planetaarülekannet ja siis on
tegemist kolmekäigulise käigukastiga: kaks aeglustavat käiku ( I ja II käik),
otseülekanne ja tagasikäik. Kiirendavate käikude (IV ja V käik) saamiseks lisatakse
planetaarreduktorile veel üks planetaarülekanne. Automaatkäigukastide tormilise
arengu perioodil, s.o 1970. 1980. aastatel, olid väga levinenud nn Simpsoni
planetaarreduktorid, kus kasutati kahte ühesuguste parameetritega tavalist
planetaarülekannet. Selline lahendus ongi võetud aluseks ülaltoodud ülekandearvude
arvutusvalemites ning ka hilisemas planetaarreduktori ehituse ja töötamise selgituses.
Simpsoni planetaarreduktori eelisteks loetakse tema lihtsamat konstruktsiooni ja
ühesuguseid detaile hammasülekannetes. Peale selle antakse I käigu ülekanne läbi
kahe planetaarülekande, mis vähendab tunduvalt hammasrataste koormust. Puuduseks
on aga väike ülekannete arvude varieerimise võimalus, sest I ja II käigu ülekannete
arvud erinevad teineteisest ainult ühe võrra (vt käesoleva peatüki ülekannete arvude
valemeid) ja III käik on otseülekanne. Selle puuduse vähendamiseks on
planetaarreduktorites hakatud kasutama erinevate parameetritega planetaarülekandeid.
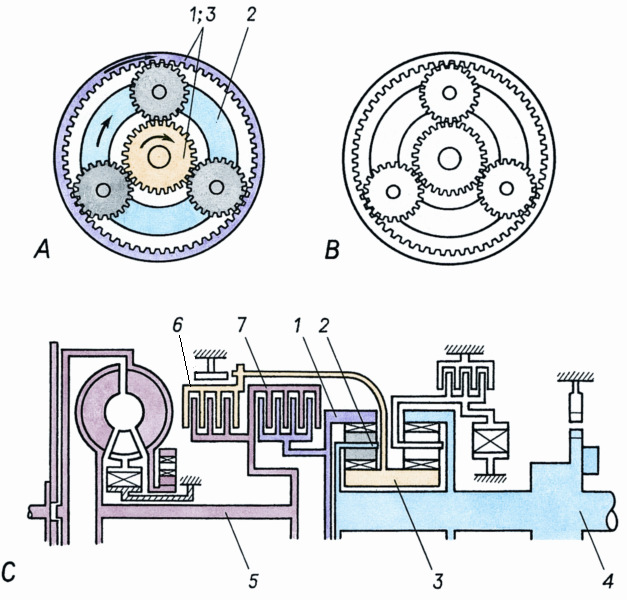
3.1.2. Simpsoni planetaarreduktor
Simpsoni planetaarreduktoris kasutatakse teineteisega seotult kahte
planetaar -
ülekannet, millel on ühine päikeseratas (5) ja (7) [Ühes tükist valmistatud kaks
hammasratast].
Reduktor on kujutatud joonisel 13. Vedav võll (1) annab
pöördemomendi reduktori sisemise planetaarülekande kroonrattale (9) ja sealt edasi
kulgeb pöördemoment vastavalt sisselülitatud siduritele ja piduritele veetavale võllile
(10). Joonis 13.
8 9 7 5 6 4 10
3
2 1
1 vedav võll; 2 päikeserataste
telg ; 3 välimise ülekande satelliitide raam;
4 välimise ülekande kroonratas; 5 välimise ülekande päikeseratas; 6 välimise
ülekande satelliidid; 7 sisemise ülekande päikeseratas; 8 sisemise ülekande
satelliidid; 9 sisemise ülekande kroonratas; 10 veetav võll. Joonisel 13 A on näidatud Simpsoni reduktori töötamise skeem esimesel käigul 7 8 9 6 5 10 4 3
2
Joonis 13 A 1
1 vedav võll; 2 päikeserataste telg; 3 välimise ülekande satelliitide raam;
4 välimise ülekande kroonratas; 5 välimise ülekande päikeseratas; 6 välimise
ülekande satelliidid; 7 sisemise ülekande päikeseratas; 8 sisemise ülekande
satelliidid; 9 sisemise ülekande kroonratas; 10 veetav võll.
Esimesel käigul kulgeb pöördemoment vedavalt võllilt (1) sisemise planetaarülekande
kroonrattale (9) ja paneb pöörlema satelliidid (8). Need omakorda käitavad
päikeserattad (7) ja (5). Päikeseratas (5) käitab satelliitide (6) kaudu kroonratta (4),
mis on otseselt ühendatud veetava võlliga (10). Kinni on pidurdatud välimise
planetaarülekande satelliitide raam (3).
Joonisel 13 B on näidatud Simpsoni planetaarreduktori töötamise skeem teisel käigul:
kinni on pidurdatud päikeserataste (5) ja (7)
plokk . Pöördemoment sisestatakse
vedava võlli (1) kaudu sisemise planetaarülekande kroonrattale (9) ja sealt
satelliitidele (8). Kuna päikeseratas (7) on kinni pidurdatud, hakkavad satelliidid (8)
koos oma raamiga pöörlema ümber päikeseratta. Satelliitide (8) raam on kokku
ehitatud veetava võlli (10) korpusega ning seega raami pöörlemine on ka veetava (10)
võlli pöörlemine. Teise käigu puhul pöörlevad välimise planetaarülekande
hammasrattad ja raam tühjalt, ilma pöördemomenti edastamata. 8 9 7 6 5 10 4 3
Joonis 13 B 2
1
1 vedav võll; 2 päikeserataste telg; 3 välimise ülekande satelliitide raam; 4 välimise ülekande kroonratas; 5 välimise ülekande päikeseratas; 6 välimise ülekande satelliidid; 7 sisemise ülekande päikeseratas; 8 sisemise ülekande satelliidid; 9 sisemise ülekande kroonratas; 10 veetav võll.
Joonisel 13 C on esitatud reduktori töötamine kolmandal käigul (otseülekanne). Sellisel juhul antakse pöördemoment üheaegselt nii sisemise planetaarülekande kroonrattale, kui ka päikeserattale (plokile). Kuna planetaarülekande päikese- ja kroonratas pöörlevad ühesuguse kiirusega, siis satelliidid ümber oma
telgede ei pöörle ning satelliitide raam liigub sama kiirusega, kui päikese- ja kroonratas. See kiirus on ka veetava võlli kiiruseks (kogu reduktor pöörleb ühe paketina). Joonis 13 C
8 9
1 vedav võll; 7
2 päikeserataste telg; 5 6
3 välimise ülekande 4 10 satelliitide raam;
4 välimise ülekande kroonratas; 3
5 välimise ülekande 2 päikeseratas;
6 välimise ülekande 1 satelliidid;
7 sisemise ülekande päikeseratas;
8 sisemise ülekande satelliidid;
9 sisemise ülekande kroonratas;
10 veetav võll. Joonis 13 D näitab reduktori tööd tagasikäigul: töötab ainult välimine planetaar-
ülekanne. Pöördemoment sisestatakse päikeserataste plokile. Kuna välimise
planetaarülekande satelliitide raam (3) on kinni pidurdatud, siis päikeserattalt (5) läbi
satelliitide (6) kroonrattale (4) edasiantav pöördemoment muudab oma suunda.
Kroonratas (4) on ühendatud veetava võlliga (10), millele nüüd ongi antud mootori
väntvõlli pöörlemisele
vastupidine pöörlemise suund.
9 8 7 10 6 5 4 3
2
Joonis 13 D 1
3.1.3. Laiendatud planetaarülekanded
Laiendatud planetaarülekandeid kasutatakse nn Ravigneaux reduktorites. Nende
eeliseks on suurem ülekandearvude
diapasoon . Puuduseks loetakse, võrreldes
Simpsoni reduktoriga, hammasrataste suuremat koormatust madalamatel ülekannetel:
esimesel käigul jaguneb edasiantav pöördemoment väiksema arvu hammasrataste
vahel. Joonisel 14 on näitena toodud ühe laiendatud planetaarülekande võimaliku
variandi joonis. Planetaarülekanne koosneb kahest päikeserattast (4 ja 5), millest
suurem on jäigalt kinnitatud vedavale võllile ja väiksem saab vastavalt vajadusele kas
vabalt pöörelda või on lukustatud. Raamil (6) pöörlevad satelliidid on paigutatud
paarikaupa: üks satelliitidest on lai ja see hambub korraga kahe hammasrattaga: suure
päikeserattaga (4) ja kitsama satelliidiga (2). Kitsam
satelliit (2) ühendab omavahel
väiksemat päikeseratast (5), laia satelliiti (3) ja kroonratast (1). Kõik nimetatud osad
paiknevad kroonratta (1) sees, mis ka on ülekande veetavaks osaks. Joonis 14. 1 5 2 3
6
4
2
Laiendatud planetaarülekande töötamine. Joonis 14 A kujutab laiendatud
planetaarülekande töötamist skeem esimesel käigul. Pöörlemine antakse vedavalt
võllilt
suurele päikeserattale (4), millega on hambumises laiad satelliidid (3).
Viimased on omakorda hambumises kitsaste satelliitide (2) hammastega. Satelliitide
raam (6) on lukustatud.
Kitsad satelliidid (2) annavad pöörlemise edasi kroonrattale
(1), mis on ühenduses veetava võlliga. Planetaarülekande väikene päikeseratas (5)
pöörleb vabalt, ega ei võta pöördemomendi ülekandmisest osa. Ülekandearv sõltub
kroonratta ja suure päikeseratta hammaste arvude
suhtest . 1 5 3 2
6
Joonis 14 A
4 Joonisel 14 B on näidatud planetaarülekande töötamine teisel käigul. Sellel käigul on
lukustatud väikene päikeseratas (5), kroonratas (1) on vabastatud ega ei võta
pöördemomendi ülekandmisest osa. Pöörlemine antakse vedavalt võllilt suurele
päikeserattale (4) ja
sellelt laiadele satelliitidele (3). Laiad satelliidid (3) annavad
pöördemomendi kitsastele satelliitidele (2). Kitsad satelliidid omakorda on
hambumises väikese päikeserattaga (5), mis on aga lukustatud, ja seetõttu peab kitsas
satelliit oma pöörlemisega liikuma ümber väikese päikeseratta. See liikumine on
tegelikult satelliitide raami (6) pöörlemine, mis antakse edasi veetavale võllile.
Ülekande arv sõltub suure päikeseratta ja väikese päikeseratta hammaste arvu suhtest. 1 5
6 3 2
Joonis 14B
4
Joonisel 14 C on kujutatud planetaarülekande kolmas käik otseülekanne. Omavahel
on kokku ühendatud väikene päikeseratas (4) ja satelliitide raam (6). Sellisel juhul on
lukustunud kitsad satelliidid (2), sest need ei saa pöörelda ümber oma telgede. Sellest
omakorda järeldub, et lukustunud on ka kitsaste satelliitidega hambumises olevad
laiad satelliidid (3) ning kogu planetaarülekanne pöörleb ühtse
tervikuna koos vedava
võlli ja suure päikeserattaga. Ülekande arv on 1,0.
1 4 3 6 2
Joonis 14 C 5 Joonisel 14 D on välja toodud Ravigneaux planetaarreduktori neljas, kiirendav käik.
Pöördemoment antakse reduktorile satelliitide raami (6) kaudu, väikene päikeseratas
(5) on lukustatud. Satelliitide raam (6) sunnib kitsaid satelliite (2) pöörlema ümber
väikese päikeseratta (5). Kuna päikeseratas (5) on lukustatud, peavad kitsad satelliidid
hakkama pöörlema ka ümber oma telgede, sundides kroonratast (1) pöörlema suurema
kiirusega, kui pöörleb satelliitide raam (6). Kroonratas (1) annab oma
pöörlemissageduse edasi veetavale võllile.
1 4 3 6 2
Joonis 14 D
5
Joonisel 14 E on näidatud planetaarülekande tagasikäik. Lukustatud on satelliitide
raam (6). Pöördemoment antakse väikese päikeseratta (4) kaudu kitsastele
satelliitidele (2). Need sunnivad kroonratast (1) pöörlema väikesele päikeserattale (5)
vastupidises suunas. Kroonratas(1) on aga ühendatud veetava võlliga. Ülekande arv
sõltub kroonratta ja väikese päikeseratta hammaste arvude suhtest. Laiad satelliidid
(3) ja suur päikeseratas (5) pöörlevad vabalt ega võta osa pöördemomendi ülekandest.
4 1 3 2 6
Joonis 14 E
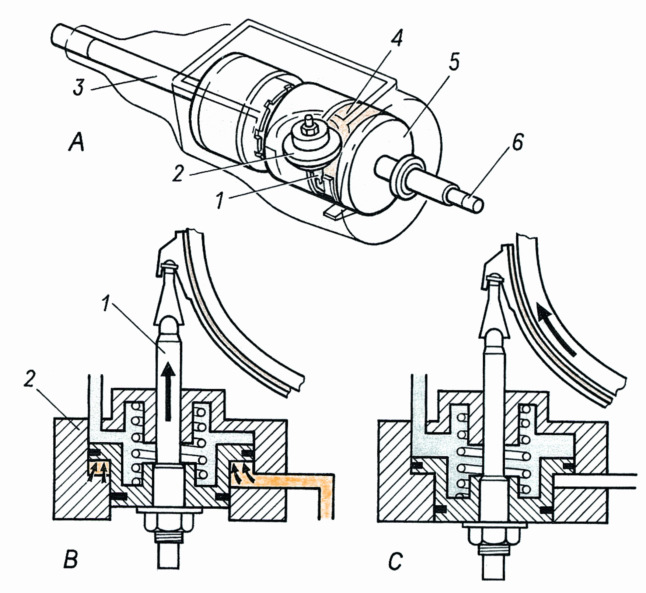
5 3.2. Sidurid
Planetaarreduktoris kasutatakse mitmekettalisi õlis töötavaid sidureid. Joonisel 15 on
kujutatud automaatkäigukastide
sidurite ehitust ja tööpõhimõtet, mis erinevatel
automudelitel oluliselt ei erine. Siduri tähtsaimad detailid on
vedavad (8) ja veetavad
kettad (9). Vedavad kettad on mõlemalt poolt kaetud hõõrdekatetega. Vedavad kettad
on oma siseservades olevate nukkidega ühendatud siduri rummuga (12), veetavad
kettad on aga oma välisservas olevate nukkide kaudu ühendatud siduri trumliga (1).
Kettaid
surub kokku
kolb (3). Kui
sidur pole sisse lülitatud, on siduri kolb (3) vedrude
(4) jõul surutud vasakpoolsesse asendisse ning siduri vedavad ja veetavad kettad on
üksteisest lahutatud.
Siduri sisselülitamiseks antakse õlirõhk siduri trumli ja kolvi vahele ning surveklapi
kuul (11) surutakse õlirõhu toimel tihedalt oma pessa. Õlirõhk lükkab kolbi (3)
paremale ning kolb omakorda surub siduri kettad tihedalt kokku. Siduri (12)
rumm ja
trummel (1) hakkavad koos pöörlema ja sidur on ühendatud.
Siduri uuesti lahutamiseks katkestatakse õlirõhk siduri trumli ja kolvi vahel,
surveklapi kuul paiskub tsentrifugaaljõu toimel oma pesast välja ning seetõttu saab
kolb vedrude survel kiiremini
liikuda vasakpoolsesse asendisse.
Joonis15.
3.3. Pidurid
Planetaarreduktoris kasutatakse kahte tüüpi pidureid:
ketas - ja lintpidureid.
Ketaspidurid on oma ehituselt sarnased siduritega, erinevus on ainult selles, et
ketaspidurites ei ühendata veetavaid kettaid mitte trumli, vaid planetaarreduktori
kere külge. Kui vedavad ja veetavad kettad omavahel ühendada, siis osutub ketaspiduri
rumm kere külge blokeerituks ja
pidur töötab.
Lintpiduri tähtsamaks osaks on ümber siduri trumli (5) (jn 16) paiknev
lint (4). Selle
pingutamisel pidurdatakse siduri trumliga koos ka planetaarülekandega ühendatud
osa.
Kui lintpiduri töösilindri (2) kolvi alla tekitatakse õlirõhk, siis töösilindri kolb koos
vardaga (1) tekitabki lintpiduri lindile vajaliku pingutusjõu. Joonis16.
Joon.16.
Lintpidur : A lintpiduri
paiknemine automaatkäigukastis, B lintpiduri
töötamine
pidurdamisel , C lintpidur on vaba
1 kolvi varras, 2 töösilinder, 3 automaatkäigukasti veetav võll, 4 piduri lint, 5 siduri
trummel, 6 automaatkäigukasti vedav võll
3.4. Vabakäigusidur
Vabakäigusiduri ülesanne on võimaldada planetaarülekande mingil osal pöörelda
ainult ühes suunas. Automaatkäigukastides kasutatakse põhiliselt kahte tüüpi
vabakäigusidureid: rull- ja
nukksidur . Nende ehitust ja tööpõhimõtet kirjeldab joonis
17. Kui näiteks vabakäigu rullsiduri vedavaks osaks on tema välisvõru (1) ja ta
pöörleb noolega näidatud suunas, siis pöörlevad hõõrdejõudude toimel
rullid (3) oma
kiilukujulisest pesast välja ja välisvõru pöörlemine eraldatakse rummust (2). Kui aga
välisvõru peaks pöörlema vastupidises suunas, siis blokeeruvad rullid oma
kiilukujulistesse pesadesse, ühendades sel viisil välisvõru ja rummu, ning kogu
vabakäigusidur pöörleb ühes suunas. Analoogselt töötab vabakäigu nukksidur: kui
välisvõru pöörleb noolega näidatud suunas, siis on vabakäigusidur vaba, sest
hõõrdejõudude toimel kalduvad nukkide (4) ülemised
otsad välisvõruga samas suunas, võimaldades välisvõrul pöörelda rummust eraldi. Kui välisvõru pöörleb
vastupidises suunas, siis kiiluvad
nukid hõõrdejõudude toimel tihedalt välisvõru ja
rummu vahele kinni ning vabakäigusidur pöörleb ühtse tervikuna.
Joonis 17.
Joon.17.Vabakäigusidurid: A rull-tüüpi vabakäigusidur, B
nukk -tüüpi
vabakäigusidur, 1 välisvõru, 2 rumm, 3 rullid, 4 nukid
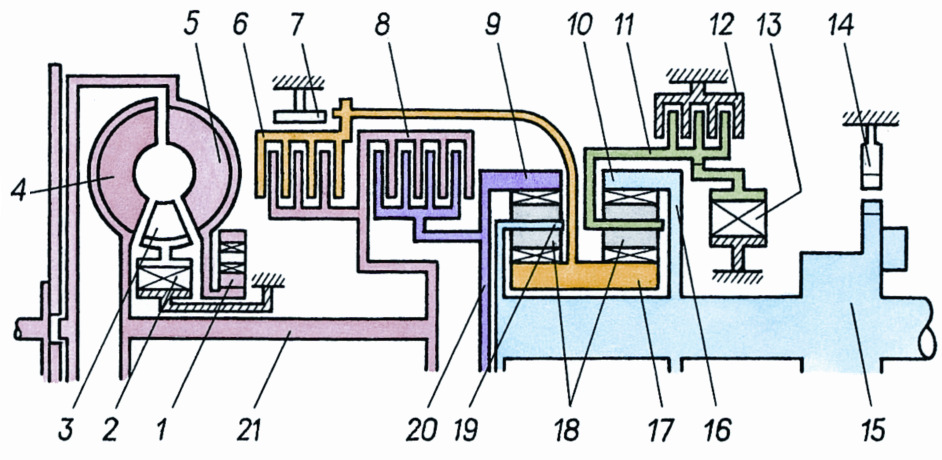
3.5. Planetaarreduktori töötamine üksikutel käikudel
Näitena on joonisel 18 esitatud kahe tavalise planetaarülekandega kolmekäigulise
planetaarreduktori skeemid ja tööpõhimõte. See on nn. Simpsoni planetaarreduktori
skeem, mida kasutatakse paljude autode automaatkäigukastides. Selles
planetaarreduktoris on kaks planetaarülekannet, kaks sidurit, üks lint- ja üks
ketaspidur ning üks vabakäigusidur. Mõlemal planetaarülekandel on ühine
päikeseratas. Reduktor on kolmekäiguline,
neljanda või viienda käigu saamiseks
tuleks sellisele reduktorile lisada veel üks planetaarülekanne. Joonis 18.
Tagarattaveolise auto automaatkäigukasti planetaarreduktori skeem: 1 hüdrosüsteemi õlipump, 2
juhtratta vabakäigusidur, 3 hüdrotrafo
juhtratas , 4 hüdrotrafo
turbiinratas , 5 hüdrotrafo pumpratas, 6
eesmine sidur, 7 lintpidur, 8
tagumine sidur, 9 eesmine planetaarülekanne, 10 tagumine planetaarülekanne, 11 tagumise planetaarülekande satelliitide raam, 12 ketaspidur, 13 vabakäigusidur,14 parkimislukusti, 15 veetav võll, 16 tagumise planetaarülekande kroonratas, 17 ühine päikeseratas mõlemale planetaarülekandele, 18 satelliidid, 19 eesmise planetaarülekande satelliitide raam, 20 eesmise planetaarülekande kroonratas, 21 vedav võll
Tabelis 1 on toodud andmed sidurite ja pidurite lülituste kohta üksikutel käikudel.
Sisselülitatud Ülekan- Sidur Ketas- Lint- Vabakäigu
Parkimis -
käik de arv Eesmine Tagumine pidur pidur sidur lukusti
P -
Parkimine X X
R - Tagurpidi 2,182 X X
N - Vabakäik
D - Auto liikumine D1 2,458 X X
automaatse käi- D2 1,458 X X
guvahetusega D3 1 X X
2 - Ainult "1" või "2" käik 1,458 X X
1 -
Ajutiselt sisselülitunud "12" 1,458 X X
1 - Ainult "1" käik 2,458 X X
"X" on tähistatud planetaarreduktori sisselülitatud osa 3.5.1. Töötamine käiguvalitsa P-asendis
Käiguvalitsa P-asendit (park) kasutatakse auto
pikemaajalisel seismajätmisel. Selles
asendis lukustatakse automaatkäigukasti veetav võll (15) lukusti (14) abil. See on
täienduseks seisupidurile. Samas aga tuleb arvestada, et P-asendit ei tohi sisse lülitada
auto liikumise ajal, sest siis võib lukustusmehhanism puruneda. Lukustusmehhanism
koosneb veetaval võllil paiknevast hammasrattast ja lukustushoovast. Vabas olekus on
lukustushoob vedru jõul hammasrattast eemaldatud. Käiguvalitsa viimisel P-asendisse
tõmmatakse käiguvalitsa ajami ühendusvarda
koonuspind lukustushoova alla ja
lukustushoob surutakse üles, hambumisse hammasrattaga. Veetav võll on sellega
lukustatud.
Planetaarreduktoris on sisse lülitatud ketaspidur (12) (jn 18), et vähendada mootori
võimalikku jõudu lukustusmehhanismile, näiteks uute siduriketaste puhul võivad
sidurid mittetäielikult lahutuda ja anda pöördemomendi edasi. Joonisel 19 on näidatud
lukustusmehhanismi töötamine. Joonis 19.
Parkimisasendi lukustusmehanism: A lukustusmehhanismi vaba asend, B lukustus-
mehhanismi lukustatud asend, 1 hammasratas veetaval võllil, 2 lukustushoob, 3
ühendusvarras, 4 koonuspind
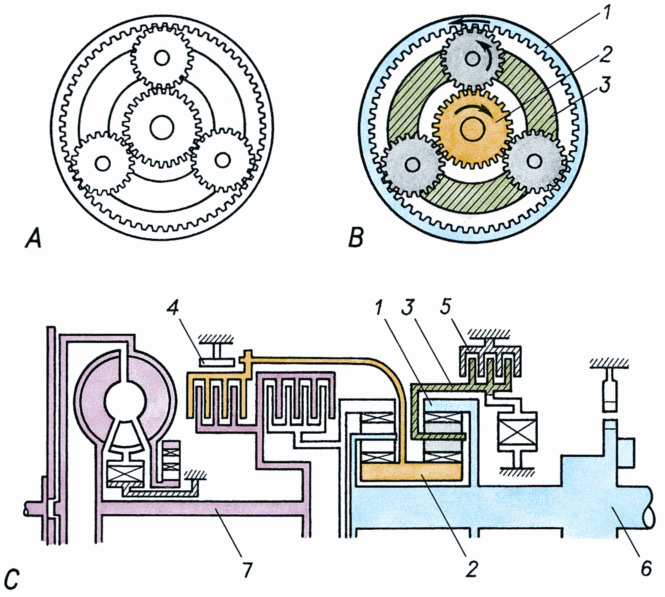
3.5.2. Töötamine käiguvalitsa R-asendis
Käiguvalitsa R-asend (
revers ) annab tagasikäigu. Järelikult tuleb mootorilt veetavale
võllile antav pöörlemissuund muuta vastupidiseks ja ka suurendada edasiantavat
pöördemomenti. Tabelist 1 on näha, et sisse on lülitatud eesmine sidur (4) ja
ketaspidur (5) (jn 20). Tööle hakkab ainult tagumine planetaarülekanne. Pöörlemine
antakse vedava võlli (7) ja sisselülitatud eesmise siduri (4) kaudu edasi tagumise
planetaarülekande päikeserattale (2). Kuna tagumise planetaarülekande satelliitide (3)
raam on lukustatud ketaspiduriga (5), siis päikeseratta (2) pöörlemine paneb
satelliitide kaudu kroonratta (1)
vastassuunas pöörlema (vt ka 3.1 skeem 12.4).
Tagumise planetaarülekande kroonratas (1) on aga ühenduses veetava võlliga (6) ja
nii hakkabki veetav võll vedavale võllile vastupidises suunas pöörlema. Ülekandearv
on 2,18. Joonis 20.
Planetaarreduktori töötamine tagasikäigul R: A eesmine planetaarülekanne ei tööta,
B tagumine planetaarülekanne: 1 kroonratas, mis on ühendatud veetava võlliga, 2
päikese-ratas, mis saab pöörlemise eesmiselt sidurilt, 3 satelliitide raam, mida
hoitakse kinni ketaspiduri abil, C automaatkäigukasti skeem: 4 sisselülitatud
eesmine sidur, 5 sisse-lülitatud ketaspidur, 6 veetav võll, 7 vedav võll
3.5.3. Töötamine käiguvalitsa N-asendis
Käiguvalitsa N asend (
neutral ) on automaatkäigukasti vabakäigu asend. Selles asendis
ei tööta ükski planetaarreduktori sidur, pidur ega ülekanne. Lukustusmehhanism on
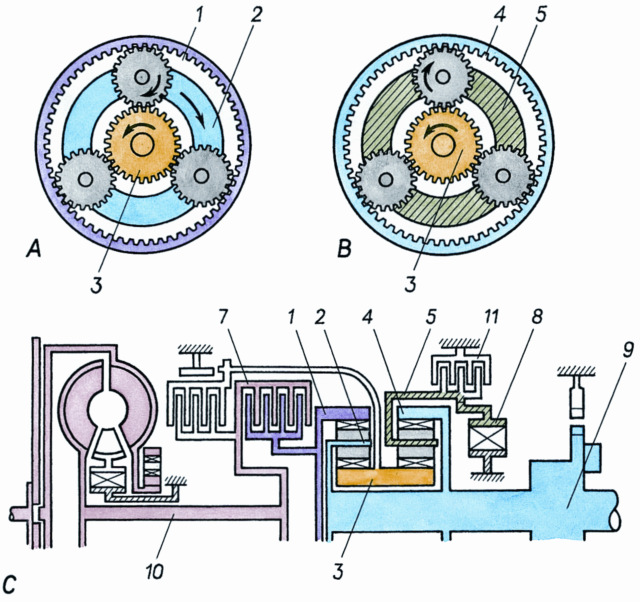
vabastatud. 3.5.4. Töötamine käiguvalitsa D-asendis, sisselülitunud 1. käiguga
Auto liikumahakkamiseks pannakse käiguvalits D-asendisse ja planetaarreduktoris
lülitub automaatselt 1. käik: ühendatud on tagumine sidur (7) (jn 21) ja töötab ka
vabakäigusidur (8), mis ei luba tagumise planetaarülekande satelliitide raamil (5)
pöörelda soovitud suunas, mida järelikult hoitakse kinni.
Pöörlemine tuleb planetaarreduktorisse vedava võlli (10) kaudu ja antakse
sisselülitatud tagumiselt sidurilt (7) edasi eesmise planetaarülekande kroonrattale (1).
Kuna eesmise planetaarülekande kõik hammasrattad ja satelliitide raam võivad vabalt
pöörelda, ühtegi neist kinni ei hoita, siis hakkavad nad pöörlema joonisel 21 A
näidatud suundades. Eesmise planetaarülekande päikeseratta (3) vastupidine
pöörlemissuund
saavutatakse sellega, et tema satelliitide raami (2) pöörlemine antakse
üle veetavale võllile (9), sealt omakorda tagumise planetaarülekande kroonrattale (4).
Kuna tagumise planetaarülekande satelliitide raami (5) hoitakse kinni vabakäigusiduri
(8) abil, siis sunnibki kroonrattas (4) satelliitide kaudu päikeseratast (3) vastupidises
suunas pöörlema. See päikeseratas on ühine nii eesmisele kui ka tagumisele
planetaarülekandele ja seetõttu pöörleb ka eesmise planetaarülekande päikeseratas
ajamile vastupidises suunas, s.o kroonratta 1 pöörlemisele. Esimesele käigule vajalik
ülekanne saadaksegi eesmiselt planetaarülekandelt, teine planetaarülekanne aitab
muuta päikeseratta pöörlemissuunda. Viimane on vajalik suurema ülekandearvu
saamiseks (vt 3.1 skeem, 12.2). Ülekandearv on 2,458. Joonis 21.
Planetaarreduktori töötamine esimesel käigul D1 : A eesmine planetaarülekanne: 1 tagumiselt sidurilt käitatav kroonratas, 2 veetava võlliga ühendatud satelliitide raam, 3 tagumise planetaarülekandega ühine päikeseratas B tagumine planetaarülekanne: 4 veetavalt võllilt käitatav kroonratas,5 vabakäigu-
siduriga kinnihoitav satelliitide raam, 6 mõlemale planetaarülekandele ühine päikeseratas, C automaatkäigukasti skeem: 7 sisselülitatud tagumine sidur, 8 lukustunud vabakäigu sidur, 9 veetav võll, 10 vedav võll, 11 ketaspidur 3.5.5. Töötamine käiguvalitsa D-asendis, sisselülitunud 2. käiguga
Kui auto on liikumisel esimese käiguga saavutanud teiseks käiguks vajaliku kiiruse,
siis automaatkäigukasti hüdrauliline
juhtplokk lülitab planetaarülekandes automaatselt
sisse teise käigu. Selleks rakendatakse tööle lintpidur (5) ja tagumine sidur (6) (jn 22).
Lintpidur hoiab kinni mõlemale planetaarülekandele ühist päikeseratast (3). Tagumise
siduri (6) kaudu antakse pöörlemine edasi eesmise planetaarülekande kroonrattale (1)
ja sealt satelliitide vahendusel
raamile (2), mis on aga ühenduses veetava võlliga (7).
Töötab ainult eesmine planetaarülekanne, tagumine on vaba. Ülekande üldine
selgitus on toodud punktis 3.1, skeem 12.1, täpsem selgitus aga on joonisel 22. Ülekandearv
on 1,458. Joonis 22.
Planetaarreduktori töötamine teisel käigul D2 : A eesmine planetaarülekanne: 1 ta-
gumiselt sidurilt käitatav kroonratas, 2 veetava võlliga ühendatud satelliitide raam, 3
lint-piduri abil kinnihoitav päikeseratas.
B mittetöötav tagumine planetaarülekanne
C automaatkäigukasti skeem: 5 sisselülitatud lintpidur, 6 sisselülitatud tagumine
sidur, 7 veetav võll, 8 vedav võll 3.5.6. Töötamine käiguvalitsa D-asendis, sisselülitunud 3. käiguga
Tavaliselt on kolmekäiguliste automaatkäigukastide kolmas käik otseülekanne. Kui
auto kiirus ja mootori drosselklapi asend vastavad kolmanda käigu tingimustele, siis
lülitab automaatkäigukasti hüdrauliline juhtplokk planetaarreduktoris sisse kolmanda
käigu. Sel juhul töötavad planetaarreduktori mõlemad sidurid (6) ja (7) (jn 23).
Pöörlemine antakse planetaarreduktori vedavalt võllilt (5) edasi nii eesmise
planetaarülekande kroonrattale (1) kui ka päikeserattale (3). Kui kroon- ja
päikeseratas pöörlevad ühesuguse sagedusega, siis satelliidid ümber oma telgede ei
pöörle ja satelliitide raam (2) sunnitakse pöörlema sama sagedusega kui kroon- ja
päikeseratas (vt 3.5, skeem 12.3). Eesmise planetaarülekande satelliitide raami 2
pöörlemine antakse edasi veetavale võllile (4). Ülekande täpsem selgitus on joonisel
23. Ülekandearv on 1,0. Joonis 23.
Planetaarreduktori töötamine kolmandal käigul D3 : A eesmine planetaarülekanne: 1
kroonratas saab pöörlemise tagumiselt sidurilt, päikeseratas eesmiselt sidurilt ja
pöörlemissagedused on võrdsed, 2 kroon- ja päikeserattaga sama sagedusega pöörlev
satelliitide raam, annab pöörlemise veetavale võllile, 3 päikeseratas,
B mittetöötav tagumine planetaarülekanne,
C automaatkäigukasti skeem: 4 veetav võll, 5 vedav võll, 6 sisselülitatud eesmine
sidur, 7 sisselülitatud tagumine sidur 3.5.7. Planetaarreduktori töötamine käiguvalitsa 2. ja 1. käigu asendis
Automaatkäigukasti käiguvalits viiakse 2. käigu asendisse raskemates
sõidutingimustes, näiteks mägiteedel, lumes jm. Käiguvalitsa sellises asendis valib
automaatkäigukast sõltuvalt sõidutingimustest kas 1. või 2. käigu, aga mitte kunagi
kolmandat. Planetaarreduktori 21 ja 2 2 lülitustes võrreldes D1 või D2 lülitustega
mingeid erinevusi ei ole, erinevused on ainult hüdraulilise juhtploki töös selleks, et
sisse ei lülituks 3. käik.
Käiguvalitsa 1. asend valitakse auto liikumisel eriti rasketes tingimustes, kui
soovitakse vältida isegi teise käigu sisselülitumist. Planetaarreduktoris on sel juhul
võrreldes D1 lülitusega erinevuseks see, et vabakäigusiduri (8) asemel on töösse
lülitatud ketaspidur (11) (jn 21). Viimane hoiab samuti kinni tagumise
planetaarülekande satelliitide raami (5), kuid ketaspidur ei luba mootoripidurdusel
muidu tekkivat vabakäiku. Käiguvalitsa 1. asendis on siiski võimalus ka teise käigu
lülituseks ( 12 ) ja see toimub siis, kui
suuremal kiirusel lülitatakse D 1.
Lühiajaliselt lülitub siis sisse teine käik, kuni auto kiirus
alaneb 1. käigule lubatud
tasemele . Planetaarreduktoris lülitus 12 ei erine lülitusest D2 .
Käesolevas peatükis on seni kirjeldatud ühte lihtsamat, tagarattaveolise auto
kolmekäigulise automaatkäigukasti planetaarreduktorit. Järgnevalt käsitletakse
esirattaveolise auto, samuti kolmekäigulise automaatkäigukasti planetaarreduktorit.
Kuigi oma väliselt kujult erineb selline automaatkäigukast tunduvalt tagarattaveolisest
käigukastist, on tema kinemaatiline skeem ja tööpõhimõte praktiliselt samad.
Esirattaveolise automaatkäigukasti planetaarreduktorisse lisandub peaülekande ajam.
Peaülekanne ise paikneb samuti automaatkäigukasti keres. Joonisel 24 esitatud
skeemil on veel üks erinevus võrreldes eelmise planetaarülekande
skeemiga : kahe
planetaarülekande ühisele päikserattale (11) on lisatud vabakäigusidur F1 ja
ketaspidur B2 . Kui ketaspidur on vaba, siis vabakäigusidur ei tööta ja päikeseratas
saab mõlemas suunas vabalt pöörelda. Ketaspiduri sisselülitumisel hoitakse kinni
vabakäigusiduri välisvõru ja sellisel juhul sisevõru ehk päikeseratas (11) saab vabalt
pöörelda ainult ühes suunas päripäeva, teises suunas on päikeseratas lukustunud.
Ketaspidur lülitatakse sisse planetaarreduktori käikude D2 , D3 ja 2 ajal. Käikude D2
ja D3 puhul võimaldab päikeseratta ühes suunas vaba pöörlemine saavutada auto
liikumise ajal vabakäigu. Käiguvalitsa asendis 2 aga lülitub lisaks veel sisse lintpidur B1 , mis lukustab päikeseratta täielikult, nii nagu on kirjeldatud käesoleva peatüki
punktis 3.5.5. Sellisel juhul on võimalik ka mootoripidurdus.
Üldiselt on aga planetaarülekandes kõigi vabakäigusidurite funktsioon käiguvahetuse
ajal tekkivaid lööke pehmendada. Näiteks tagarattaveolise automaatkäigukasti
planetaarreduktori kinemaatilises skeemis (punkt 3.5.5.) puuduvad vabakäigusidur F1
ja selle lülituspidur B2 . Kui selles planetaarreduktoris vahetub käik D3 D2 , siis
käiguvahetuse ajal tekkiva löögi ärahoidmiseks peab täpselt eesmise siduri
lahtiühendumise hetkel sisse lülituma lintpidur (vt punktid 3.5.5 ja 3.5.6). Sellist
täpsust on aga raske tagada ja seetõttu on sellise skeemi puhul käiguvahetuslöögid
mõnikord paratamatud. Käesoleval skeemil (joonised 24 ja 25) on päikeseratas
ühendatud vabakäigusiduriga F1 ja selle lülituspiduriga B2 . Kolmanda käigu
töötamise ajal on vabakäigusidur F1 ketaspiduri B2 abil sisse lülitatud, kuid
vabakäigusidur
laseb päikeserattal päripäeva pöörelda. Teise käigu sisselülitamiseks
tuleb ainult eesmine sidur C 2 vabastada, vabakäigusidur hoiab ise päikeseratast kinni,
kuna eesmisele planetaarülekandele antav pöördemoment püüab päikeseratast vastupäeva pöörata. Tänu sellele toimub käiguvahetus
sujuvalt . Analoogiliselt
toimivad ka kõik ülejäänud planetaarreduktori vabakäigusidurid.
Kaasaegsetel, elektroonilise juhtimisega automaatkäigukastidel saavutatakse kõikide
käikude sujuv ühendamine sellega, et mingi käigu sisselülitamise hetkel ei lahutata
eelmist käiku täielikult, vaid sellele käigule vastava siduri või piduri tööks vajalikku
õlirõhku hakatakse vähendama. Samal ajal hakatakse sisselülitatava käigu siduri või
piduri õlirõhku sujuvalt suurendama. Järelikult on mingi lühikese aja jooksul kaks
käiku korraga sees ja üleminek ühelt käigult teisele toimub sujuvalt, vastavalt sellele,
kuidas ühe käigu siduri või piduri rõhk väheneb ja teisel tõuseb. Sellega aga kaasneb
sidurite ja pidurite hõõrdekatete intensiivsem kulumine ja õli
kuumenemine .




















































Kõik kommentaarid