PNEUMAATILISED JUHTIMISKOMPONENDID JA TÄITURID Iseseisev töö Juhendaja Tartu 2013 SISSEJUHATUS Selleks, et suruõhu abil teha meile vajalikke operatsioone on vaja täitureid, mille abil muudetakse elektriline, hüdrauliline või pneumaatiline energia valmistustööks kasuta- tava masina mehhaaniliseks liikumiseks (füüsikaliseks tööks). Pneumaatiliste täiturite rakendamiseks on vajalikud juhtimiskomponendid, mille ülesandeks on vajalike juhtimissignaalide tekitamine, täiturite liikumiskiiruse, suruõhu rõhu reguleerimine ja muude juhtimisoperatsioonide täitmine pneumosüsteemides. [1.] 1. PNEUMAATILISED JUHTIMISKOMPONENDID 1.1Pneumaatiliste juhtimiskomponentide klassifikatsioon · Pneumojaotid ehk suunaventiilid · Drosselid ehk vooluventiilid ehk kägiventiilid · Tagasilöögiklapid
6.1. Pneumojaotite paigaldus ja töökindel toimimine................................13 KOKKUVÕTE................................................................................................. 13 KASUTATUD KIRJANDUS............................................................................... 14 3 SISSEJUHATUS Pneumaatiliste täiturite rakendamiseks on vajalikud juhtimiskompoendid, mille ülesandeks on vajalike juhtimissignaalide tekitamine, täiturite liikumiskiiruse ja suruõhu rõhu reguleerimine ning muude juhtimisoperatsioonide tätmine pneumosüsteemides Üks pneumaatilisi juhtimiskomponentide liike on pneumojaotid. Penumojaotid on pneumokomponendid, mille abil muudetakse suruõhu liikumisteekonda pneumotorustikes. Antud töös tutvustatakse pneumojaotite asendeid ja tingmärke
................................................................... 6 2 3 Sissejuhatus Automaatika on teaduse ja tehnika haru, mis tegeleb automaatseadmete ja automatiseerivate protsesside kontrollimise ja juhtimise meetodite ning vahenditega. Automaatikasüsteemide töö rajaneb süsteemi kuuluvate ja süsteemiosade seisundit kirjeldaval informatsioonil, mida edastatakse elektrilisete, pneumaatiliste, hüdrauliliste, optiliste ja muude signaalide abil mis tagasisidestatuna saavad protsesse mõjutada.Signaalid juhitavast keskkonnast saadakse mitmesugustest anduritest. 3 4 Küttesüsteem Automaatika abil on väga lihtsalt võimalik erinevate kütterežiimide kasutamine vastavalt eelprogrammeeritud ajagraafikule. Näiteks öösel hoida jahedamat
- kõrgete hoonete krohvimisel tuleb kasutada ripptellinguid; - trepikodade krohvimisel kasutatakse spetsiaalseid töölavasid, mille esimesed ja tagumised toed on erineva kõrgusega. Välisseinte maalritööd tuleb teha tellingutelt või ripptöölavadelt või treppredelilt. Metallkonstruktsioonide värvimisel kõrgemal kui 1,3 m, samuti tornidest värvimisel peavad töölised kasutama kaitsevööd. Nõjaredeleid ei tohi toetada aknaraamidele. Tellingutel ja töölavadel pneumaatiliste tööriistadega töötades peab kasutama respiraatorit ja kaitseprille. Kõrvaliste isikute viibimine töökohal on keelatud.
Värvipüstolite pesuseadmed Värvipüstolid ja suruõhufiltrid Filtreerimine Keskmiselt imeb kompressor iga välisõhu kuupmeetriga sisse kuni 190 miljon mustuse osakest, süsivesinikku, viirust ja bakterit. Kompressor ise suudab kõrvaldada ainult suuremad mustuseosakesed ning enamus saasteaineid jääb suruõhku. See tähendab, et enamiku süsteemide korral tuleb suruõhku hoolikalt puhastada: Puhas ja kvaliteetne suruõhk pikendab suruõhul töötava seadme tööiga, tagab pneumaatiliste seadmete ja juhtsüsteemide töö tippvõimsusel ning hoiab torud & klapid saastevabad. Seega ei vähenda see üksnes hooldus- ja remondikulusid, vaid võib vähendada ka algseid investeerimiskulusid. POLEERIJAD Pilt ja tekst võetud: http://shop.smartservice.ee/products/Rupes-RA150A.html http://www.benefit.ee/seadmed-tookodadeprojekteerimine/seadmed-tooriistad/blowtherm- varvikambrid/10534/ http://www.google.ee/imgres?
Põhikäepidemesse on paigutatud lülitusseadmed ja sellesse siseneb toitekaabel või kinnitatakse selle alumisse otsa akupesa. Löök- ja vibrotoimeliste masinate käepidemed on varustatud amortiseerivate elementidega. *lülitus- ja juhtimisseadmed – masina töö alustamises ja lõpetamiseks ning tööparameetrite operatiivseks muutmiseks või nende eelvalikuks (tüüp 1 – vajutatavad nupplülitid; tüüp 2 – ümber lülitatavad klahvlülitid) 5. Pneumaatiliste käsimasinate liigitus konstruktsiooniliste lahenduste alusel, nende kasutusala. – rootormootorid kasut peamiselt pöörleva liikumise saamiseks, enimkasutatavad. Turbiinmootorid – kasut peamiselt suurt töökiirus nõudvate operatsioonidega lihvimispoleerimismasinais. Kolbmootoritest löök- või pöördtoimelise liikumise saamiseks. 6. Põhilised pneumaatiliste käsimasinate tüübid. pneumodrell, pneumaatiline naelapüstol
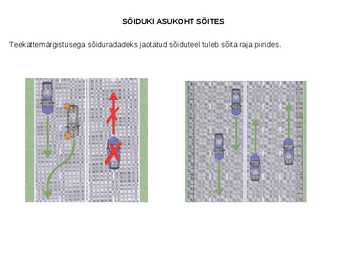
sõita nimetatust kiiremini, tuleb sõita äärmisel parempoolsel rajal, kui käesoleva määrusega ei ole sätestatud teisiti. Mootorsõidukil või autorongil, mis ei tohi või mis ei saa sõita kiiremini, kui 40 km/h, peab olema taga vasakul äärel või keskel käesoleva määruse lisa 4 kohane aeglase sõiduki tunnusmärk: Kattega teel tohib sõita ainult mootorsõidukiga, mis toetub tee pinnale pneumaatiliste või elastsest materjalist rehvide või roomikutega. SÕIDUKI ASUKOHT SÕITES Trammiliiklust takistamata tohib rööbasteta sõidukiga sõita või seisma jääda sõiduteega samal tasandil asuval pärisuunalisel trammiteel ainult siis, kui sõiduradade arv ei ole määratud liiklusmärgiga "Sõidurajad ja suunad". Kui trammiliiklust takistatakse, tuleb trammitee vabastada. Kõrvalasuvad juhid peavad seda võimaldama.
Ülaltoodud võimalus kehtib ainult siis, kui on kindel, et koormusskeemi tulevikus ei muudeta. Dünaamiline koormus, mida põhjustavad tavaliselt kahveltõstukid ning veokid on teine koormuste liik, mis määrab põrandakonstruktsiooni. Oluline on tähelepanu pöörata ratastele rakenduvatele koormustele. Kahveltõstukid võivad olla kahekordsete ratastega või ilma. Sama oluline on tähelepanu pöörata ka tõstukirataste materjalile. Rattad võivad olla kas pneumaatiliste kummiratastega või täiskummist ratastega, metallist või vulkollaanist. Miks eelpooltoodud info nii oluline on selleks, et määrata ratta kontaktpind betoonplaadiga. Vulkollaan ja metallrattad on põrandatele kõige ohtlikumad, kuna oma jäikuse tõttu on kontaktpind väike ja seega kontaktsurve põrandale väga suur (isegi kuni 10 N/mm²). Teine suur oht jäikade rataste puhul on see, et nad lõhuvad betoopõrandate deformasioonivuuke
Andurite kasutusala kuulub automaatika ja mõõtetehnika valdkonda. Andureid võib lugeda nii automaatika- kui ka mõõtevahenditeks. Automaatika on omakorda teadus- ja tehnikaharu, mis tegeleb automaatseadmete ja automatiseeritavate tehnoloogiliste protesside kontrollimise ja juhtimise meetodite ning vahenditega. Automaatikasüsteemide töö rajaneb süsteemi kuuluvate seadmete ja süsteemiosade seisundit kirjeldaval informatsioonil, mida edastatakse elektriliste, pneumaatiliste, hüdrauliliste, optiliste jm. signaalide abil. Süsteemi talitluse kohta informatsiooni saamise üheks võimaluseks on juhtimisobjekti väljundite mõõtmine. Seadmete, masinate või protsesside juhtimiseks tuleb mõõta mitmesuguseid füüsikalisi, nt. mehaanilisi, soojuslikke, optilisi, elektromagnetilisi vms. suurusi. Automaatika nüüdissüsteemides edastatakse ja töödeldakse informatsiooni aga valdavalt elektriliste ja optiliste signaalidena
ergutab kudede talitlust. Vibratsiooni vähendamine: vibratsiooni tekitava protsessi asendamine mõne teise tehnoloogilise protsessiga, näiteks neetimise asendamine keevitusega käsiinstrumendi vibratsiooni vähendamine vedrudest või kummist amortisaatorite abil, mis monteeritakse tööriista korpuse ja käepideme vahele töödeldava detaili kinnitamine: näiteks kummist alus töödeldava detaili all vähendab vibratsiooni kui ka müra raskete pneumaatiliste instrumentide kinnitus statiivile konstruktsioonide jäikuse vähendamine vahelagede vibratsiooni nõrgendamiseks masinate ümberpaigutamine tööruumis isikukaitsevahendite kasutamine. Füüsikaliselt iseloomustatakse vibratsiooni võnkesagedusega f, Hz amplituudiga A, mm vibratsiooni kiirusega v, mm/s. Võnkesageduse >16-20 Hz puhul kaasneb vibratsiooniga müra. Analoogselt müraga iseloomustatakse vibratsiooni võnkekiiruse nivooga Lv
tõstmiseks trükimasinas. Selleks kasutatakse forgreifereid ja lükkavaid rulle. Nende abil võib siis sujuvalt muuta poogna kiirust ja anda ta edasi, kas ülekandesilindrile või trükisilindrile, kus poogen fikseeritakse silindri haarajate poolt. Kuidas toimub poognate üleandmine pealepanemisaparaadist trükisektsiooni? Milliseid forgreifereid tunnete? 1. Liikumise viisi järgi: Kiikuva liikumisega Rotatsioonliikumisega 2. Poogna haaramise viisi järgi eristatakse: Mehaaniliste haarajatega Pneumaatiliste haarajatega 3. Olenevalt asukohast transporditava poogna suhtes: Ülemised Alumised 4. Konstruktiivselt eristatakse haarajaid olenevalt nende ehitusest: Liikuva peaga Liikumatu peaga Liikumatu võlliga Ektsentrilise võlliga Kuidas toimub trükitud poognate vastuvõtt? Poognate väljatoomiseks vajalik kett-transportöör Kett-transportöör on omapärasteks mehaanilisteks poognate kiiruse vähendamise seadeteks. Kiiruse vähendamine poognate väljatoomisel on aga kindlasti vajalik
1.4 VIBRATSIOONI VÄHENDAMINE Vibratsiooni tekitava protsessi asendamine mõne teise tehnoloogilise protsessiga,näiteks neetmiseimise asendamine keevitusega.Käsiinstrumendi vibratsiooni vähendamine vedrudest või kummist amortisaatorite abl,mis monteeritakse tööriista korpuse ja käepidamise vahele.Töödeldava detaili kinnitamine:näiteks kummist alus töödeldava detaili all vähendab nii vibratsiooni kui ka müra. Raskete pneumaatiliste instrumentide kinnitus statiivile .Konstruktsioonide jäikuse vähendamine vahelagede vibratsiooni nõrgendamiseks.Masinate ümberpaigutamine tööruumis.Isikukaitsevahendite kasutamine. Füüsikaliselt iseloomustatakse vibratsiooni võnkesegadusega f,Hz,amplituudiga A,mm; vibratsiooni kiirusega v,mm/s.Võnkesegaduse>16-20Hz puhul kaasneb vibratsiooniga müra .Analoogiliselt müraga iseloomustatakse vibratsiooni vönkekiiruse nivooga L: L=20x1gv/v=20x1gv/5x10, kus v ühik on mm/s
Tingmärgid Ülesanne: • Eemaldada jääkmustus • Rõhu seadistamine masinale sobivaks • Vajadusel õlitamine Koosneb: Õhufilter(Eemaldab tahkeid osakesi ja kondensaati) • Rõhuregulaator(Hoiab töörõhku )• Õliti (ainult vajadusel)( Lisab õhule õli) 7. Kolvivarreta silindrite eelised, omadused (võrreldes kolvivarrega silindritega).Loetleda tüübid. Pikad liikumised vähema ruumikasutusega Tross-silindrid • Pilutihendiga silindrid • Püsimagnetiga silindrid 8. Pneumaatiliste pöördsilindrite tüübid ja tööpõhimõtted. Pöördsilindrid (piiratud pöördenurgaga): Hammaslatiga (pöördemoment u. 150 Nm) Labaga (pöördemoment u. 20 Nm) 9. Haaratsid, nende omadused ning tööpõhimõtted. Kasutatakse objektide haaramiseks ja hoidmiseks. • Haaratsi konstruktsiooni määravad teisaldatava objekti kuju, mõõtmed. 10. Suunaventiilid, nende ülesanne ning tingmärgid. Suunaventiilide tähistamine ning juhtimisviisid. Pidev- ning impulssjuhtimine.
energiaks) ning ümbruses hajuvaks soojuseks. Ventilaatori peamisteks tehnilisteks näitajateks on tootlikkus Q (m3/s) ja rõhk p (Pa). Õhu liikumiskiirus ja massikonsentratsioonitegur valitakse sõltuvalt materjalist, ehk siis tuleb leida materjali ja tema õhukulu suhe, seda tähistan µ . Ülesande esimeseks leitavaks suuruseks määran tema tootlikkuse Q ehk siis seadme jõudluse kg/h. Kuna on teada, et mustika lehe kaal on kusagil 1,7 g siis on võimalik pneumaatiliste määratud suuruste järgi võtta V- kiirus m/s. Kasutatud tähised: · P-võimsus kW · V-kiirus · V õ -õhukulu m/s · Q p - masina jõudlus kg/h · µ - massikonsentratsioon · De- ristkülikukujulise õhukanali läbimõõt · Q- õhu mahukulu · p- rõhk · vh- hõljumiskiirus · 2 - materjali erimass tonni/m3; · p k = rõhukadu pa · p mh =
8 sooritamist kiires tempos. (kordinatsioonineuroosi) vormid. masinakirjutajad, telegrafistid, arvutusmasinate operaatorid. Paikne ja üldine vibratsiooni Vibratsioontõbi (angioneuroos, Töötamine pneumaatiliste toime, süstemaatiline angiotrofo-neuroos) ja teiste instrumentidega, liigjahtumine. mis genereerivad üld- ja paiksest vibratsiooni (neetijad, neetija-abid, valu puhastajad,
, Į.Sissejuhatus Kaasaegsetes automaatįkaseadmetes on laialdaselt kasutusel automaatika- vahendid, mis ei baseeru ainult pneumaatika komponentideĮ, vaid sisaldavaa lisaks ka elektrilisi komponente. SelĮine kombinatsioon annab mitrneicļ eeĮiseid võrreldes nn. "puhaste'' pneumaatikaseadmetega nagu : l. Seoses sellega, et elektropneumaatikaseadmetes otr täitruitena kastrtuseĪ pneumoajamid säilitavad antud seadmed kõik pneumaatiliste ajamite poolt pakutavad eelised (tundetus ülekoormusele, lineaarsete liiļąrmistt, Įihtne realiseerįm ine, lihtne reņleeritavĮļS, jne. ) ; 2. Elektriliste juhtimiskomponentide kasutamine võimaldab välticiil "puhaste" pneumaatikaseadtnete üht suurįmat puudust, nimelt seadrnc. maksumuse kįiret kasvu seadme tÖÖ algoritmi keerukuse kasvuga, kuna elektrįliste juhtimiskomponentide maksumus võrreldes pneumaatilistega on märgatavalt madalarn;
taaral valmistajatehase märgistus ja kasutataval värvipartiil valmistajatehase poolt informatsioon värvmaterjali kahjulikkusest (ohukaart). · Üksteisega reageerivaid värvaineid tuleb hoida lahus. · Värve, lakke, lahusteid tuleb hoida hermeetiliselt suletavas taaras. · Enne pihustiga värvimise alustamist tuleb kontrollida voolikute, värvipaagi, värvipihusti, manomeetri, kaitseklapi, üksikkaitse-vahendite ja ventilatsiooni korrasolekut. · Pneumaatiliste värvimisseadmete voolikuid võib lahutada alles pärast suruõhu juurdevoolu katkemist.Värvimisseadme õhuvoolikud peavad olema tugevasti ühendatud, et õhusurve neid lahti ei rebiks. Keelatud on survevoolikutel kasutada isevalmistatud traatklambreid. Töö ajal tuleb perioodiliselt jälgida manomeetri näitu. Rõhku survepaagis ei tohi tõsta üle töörõhu. · Vertikaalpindade katmisel tuleb pihustit hoida risti värvitava pinnaga ja nii, et pihusti kaugus
1. Paberipakk. 2,3,4. Haarajate liikumistee. 5. Kallaklaua surveratas. 6. Transportööri lint. 7. Kallaklaud.8. Esitõkised ja haarajad 1. Paberipakk. 2. Puhur ja käpp. 3. Tagumised iminapad 5. Eesmised poognat liigutavad iminapad. 6. Poogna veorull. 7. Raskusrattad kallaklaual. 8. Veorihm. 9. Haarajad ja esitõkis Milliseid forgreifereid tunnete? 1. Liikumise viisi järgi: Kiikuva liikumisega Rotatsioonliikumisega 2. Poogna haaramise viisi järgi eristatakse: Mehaaniliste haarajatega Pneumaatiliste haarajatega 3. Olenevalt asukohast transporditava poogna suhtes: Ülemised Alumised 4. Konstruktiivselt eristatakse haarajaid olenevalt nende ehitusest: Liikuva peaga Liikumatu peaga Liikumatu võlliga Ektsentrilise võlliga Kuidas toimub trükitud poognate vastuvõtt? Poognate väljatoomiseks vajalik kett-transportöör Kett-transportöör on omapärasteks mehaanilisteks poognate kiiruse vähendamise seadeteks. Kiiruse vähendamine poognate väljatoomisel on aga kindlasti vajalik
5.19. Vedrude lahtivõtmisel või kokkupanekul tuleb kasutada asjakohaseid pigistusklambreid. 5.20. Kui agregaatide ja detailide mahavõtmiseks on vaja füüsilist pingutust või on neid maha võtta ebamugav, tuleb kasutada ohutut tööd võimaldavaid tõmmitsaid. 5.21. Töötamisel vasaraga või haamriga tuleb igati hoiduda end või juuresolijaid vigastamast. 5.22. Töötamisel pneumaatiliste töövahenditega tuleb täpselt järgida suruõhukäsitööriistadega töötamise ohutusjuhendit. 5.23. Ei tohi lubada olla teistel ega ka ise mitte olla kalluri ülestõstetud veokasti all, kui kasti alla ei ole paigutatud alustugesid, mis välistaks kasti allalaskumise. Selle otstarbeliste alustugede asemel ei tohi kasutada juhuslikke esemeid (kangid, metallitükid jt.) 5.24
100 80 88 140 128 150 200 425 448 250 2005 2337 Tabel 3. FESTO silindrite "surnud ruumala" leidmine. Märkus: 1000cm3 = 1dm3 Sele 60 Silindri tööks vajaliku õhu kulu leidmine 56 6 Pneumaatilised juhtimiskomponendid 6.1 Sissejuhatus Pneumaatiliste täiturite rakendamiseks on vajalikud juhtimiskomponendid, millede ülesandeks on vajalike juhtimissignaalide tekitamine, täiturite liikumiskiiruse, suruõhu rõhu reguleerimine ja muude juhtimis-operatsioonide täitmine pneumosüsteemides. Juhtimiskomponendid on: 1. Pneumojaotid ehk suunaventiilid 2. Drosselid ehk vooluventiilid ehk kägiventiilid 3. Reduktsiooniklapid 4. Sulgurklapid 5. Taimerid 6. Rõhutundlikud elemendid 7. Sammjuhtimismoodulid 8. jne. 6
100 80 88 140 128 150 200 425 448 250 2005 2337 Tabel 3. FESTO silindrite “surnud ruumala” leidmine. Märkus: 1000cm3 = 1dm3 Sele 60 – Silindri tööks vajaliku õhu kulu leidmine 56 6 Pneumaatilised juhtimiskomponendid 6.1 Sissejuhatus Pneumaatiliste täiturite rakendamiseks on vajalikud juhtimiskomponendid, millede ülesandeks on vajalike juhtimissignaalide tekitamine, täiturite liikumiskiiruse, suruõhu rõhu reguleerimine ja muude juhtimis-operatsioonide täitmine pneumosüsteemides. Juhtimiskomponendid on: 1. Pneumojaotid ehk suunaventiilid 2. Drosselid ehk vooluventiilid ehk kägiventiilid 3. Reduktsiooniklapid 4. Sulgurklapid 5. Taimerid 6. Rõhutundlikud elemendid 7. Sammjuhtimismoodulid 8. jne. 6
Haardesse võetud materjali tunneb robot ära. Tarkvara võimaldab robotil koguaeg õppida ja sorteerimisoskusi parandada. Robot on kohandatud tööks karmides ja tolmustes tingimustes. Joonisel 5 on toodud ZenRobotics Recycleri skeem. [17,18] Joonis . ZenRobotics Recycler skeem [23] 5. HOONE LAMMUTAMINE 5.1. Ehitise lammutamise võimalused Lammutustöödeks on einevaid võimalusi, kuid üldisemad meetodi jagunevad järgnevalt: 1. pneumaatiliste ja hüdrauliliste lammutajate kasutamine; 2. hoone demonteerimine; 3. surve abil lõhkumine, mehaaniline ja keemiline lõhkumine; 4. mehaaniline lammutamine ja demonteermine; 5. õhkimine; 6. betoonkonstruktsioonide lammutamine kuuli ja kraana abil. [19] 5.1.1. Pneumaatilised ja hüdraulilised lammutajad Pneumaatilisi ja hüdraulilisi lammutajaid kasutatakse üldsiselt silla plaatide, vundamentide ja kõnniteede lammutamiseks. [19]
Kasutatavatel värvidel peab olema taaral valmistajatehase märgistus ja kasutataval värvipartiil valmistajatehase poolt informatsioon värvmaterjali kahjulikkusest (ohukaart). 4.2. Üksteisega reageerivaid värvaineid tuleb hoida lahus. 4.3. Värve, lakke, lahusteid tuleb hoida hermeetiliselt suletavas taaras. 4.4. Enne pihustiga värvimise alustamist tuleb kontrollida voolikute, värvipaagi, värvipihusti, manomeetri, kaitseklapi, üksikkaitse-vahendite ja ventilatsiooni korrasolekut. 4.5. Pneumaatiliste värvimisseadmete voolikuid võib lahutada alles pärast suruõhu juurdevoolu katkemist. Värvimisseadme õhuvoolikud peavad olema tugevasti ühendatud, et õhusurve neid lahti ei rebiks. Keelatud on survevoolikutel kasutada isevalmistatud traatklambreid. Töö ajal tuleb perioodiliselt jälgida manomeetri näitu. Rõhku survepaagis ei tohi tõsta üle töörõhu. 4.6. Vertikaalpindade katmisel tuleb pihustit hoida risti värvitava pinnaga ja nii, et pihusti kaugus
meetmeid rakendada. (17) Vaatamata nõudmisele informeerida vanemmehaanikut käesoleva paragrahvi lõikes (16) nimetatud juhtudel, peab vahimehaanik viivituseta, kui olukord seda nõuab, kasutusele võtma meetmed laeva, selle mehhanismide ning laevapere ohutuse tagamiseks. (18) Vahimehaanik on kohustatud andma vahipersonalile asjakohased juhised ja teabe, mis on vajalikud masinavahil. Remonditöid, sealhulgas elektriseadmete, mehaaniliste, hüdrauliliste, pneumaatiliste või elektrooniliste seadmete remonti tohib laeval teha ainult vahi- ja vanemmehaaniku teadmisel. (19) Vahimehaanik peab tagama pideva õhu või auru surve helisignaalide andmiseks. (13) Vahimehaanik peab tagama kõigi laeva manööverdamiseks ettenähtud seadmete kohese üleviimise käsijuhtimisele, kui selleks antakse vastav korraldus seoses sellega, et laev sõidab intensiivse laevaliiklusega vetes. Vahimehaanik peab tagama, et manööverdamise vajaduseks, sealhulgas roolimasina tarbeks on
pistik pistikupesast eemaldatud. Akutrellil tuleb eemaldada aku. - Tö ö tavat trelli ei tohi kä est panna. Kä ivitada tuleb trell alles siis, kui ta on kindlalt kä es. - Kruvide keeramisel tuleb jä lgida, et kruvikeeraja ots oleks tä pselt kruvi sä lgus ja seejä rel alles suruda trellile ning tõ sta astmeliselt kiirust. Kui kruvikeeraja hakkab libisema, tuleb trell kohe seisata. 12. KOMPRESSORI KASUTAMINE Kompressori ja pneumaatiliste tö ö riistadega võ ivad tö ö tada isikud, kes tunnevad kompressori ja tö ö riistade ehitust ning on lä binud juhendamise tehtavateks tö ö deks. Enne kompressori kä ivitamist tuleb kontrollida kompressori korrasolekut, milleks: - kontrollida õ li taset karteris (peab olema õ livarda miinimumi ja maksimumi mä rgi vahel) - tuleb kindlustada piisav ventilatsioon, milleks tuleb jä lgida, et kompressor oleks
304-Nimetage käsimasinais kasutatavate pneumomootorite tüübid? -rootormootorid (vt tv lk 44 joon 3.1); -turbiinmootorid (vt tv lk 44 joon 3.2); -kolbmootorid 306-Millistest allikatest toidetakse hüdraulilisi käsimasinaid? - teiste ehitusmasinate hüdrosüsteemidest; - individuaalsetest kergesti teisaldatavatest SPM-iga käitatavatest pumbajaamadest. 307-Nimetage hüdrauliliste käsimasinate peamised puudused. Nende puudusteks elektriliste ja pneumaatiliste masinatega võrreldes on: - kõrgem maksumus tänu koostisosade valmistamise täpsusele ja tugevusele; - kõrge keskkonnaohtlikkuse tase . 308-Millise jõuallikaga on varustatud motoriseeritud käsimasinad? Motoriseeritud käsimasinad on varustatud individuaalse väikeselitraazilise sisepõlemismootoriga. Vastavalt masina kasutusvaldkonnale ja vajalikule võimsusele kasutatakse enamikel juhtudel käsitsikäivitusega õhkjahutusega kahetaktilisi
a) mehhaanilised, b) pneumaatilised, c) hüdraulilised, d) elektrilised,e) kombineeritud. 68-Nimetage mehaaniliste juhtimissüsteemide tüübid konstruktsiooni järgi. a) sarniir-hoob süsteemid, b) tross ja tross-plokk süsteemid, c) mehhaaniliste ülekannetega süsteemid. 69-Nimetage hüdrauliliste juhtimissüsteemide tüübid tööpõhimõtte järgi. a) pumbata süsteemid ja b) pumbaga süsteemid. 70-Millised on pneumaatiliste juhtimissüsteemide eelised võrreldes hüdrosüsteemidega? Pneumaatiliste juhtimissüsteemide eelised on sujuv lülitus, võimalus energia akumuleerimiseks resiiverisse, madalamad tugevusnõuded elementidele ja tihenditele, lihtsam hooldada, lekkimise korral ei saasta keskkonda. Puudusteks on elementide suured gabariidid, töö ebatäpsus ja reageerimise Hüdrauliliste juhtimissüsteemide eelisteks on nende suur töökindlus ja pikaealisus, töö täpsus, suured arendatavad juhtimisjõud ja seadmete suhteliselt väikesed mõõtmed
nukki st kumbagi mootori pöörlemissuuna jaoks üks nukk, samas mitte reverseeritaval mootoril on õhujagaja käivitamiseks ainult üks komplekt nukke II ketasõhujagajad Suruõhu süsteem Suruõhku kasutatakse laevades SPM käivitamiseks PM reverseerimiseks Pneumaatiliste juhtimissüsteemide käivitamiseks Tifooni käivitsmiseks Kinkstonite läbipuhumiseks Katelde käivitamiseks Majandus otstarbeks. Laevades võivad olla eraldi kompressorid käivitusõhuballoonide ja majandus – õhuballoonide täitmiseks. Majandusõhu kompressorid on tavaliselt üheastme – lised ( 10 bar) REGISTRI NÕUDED: 1. Reverseeritavatele PM peab käivitusballoonis õhku jätkuma 12 X
b) Pneumaatilised c) Hüdraulilised d) Elektrilised e) Kombineeritud 68-Nimetage mehaaniliste juhtimissüsteemide tüübid konstruktsiooni järgi. a) Sarniir-hoob juhtimissüsteem b) Tross ning trossplokk juhtimissüsteem c) Mehaaniliste ülekannatega juhtimissüsteem 69-Nimetage hüdrauliliste juhtimissüsteemide tüübid tööpõhimõtte järgi. a) Pumbaga juhtimissüsteem b) Pumbata juhtimissüsteem 70-Millised on pneumaatiliste juhtimissüsteemide eelised võrreldes hüdrosüsteemidega? Sujuv lülitus; võimalus energia akumuleerimiseks ressiiverisse; madalamad tugevusnõuded elementidele ja tihenditele; lihtsam hooldada; lekke korral ei saasta keskkonda 71-Milleks kasutatakse masinais jälgivat juhtimissüsteemi? Jälgitavat süsteemi kasutatakse nende elementide juhtimiseks, millel on vaja muuta nende asendit, neid selles asendis hoida ning
masinaruumist tulekahju korral ning tõenäolistele tuleleviku suundadele. Vahimehhaanik on kohustatud andma vahipersonalile vajalikud juhised ja teabe, mis on vajalik ohutu masinavahi tagamiseks. Tavapärast mehhanismide tehnilist hooldust, mida täidetakse kui lisaülesannet, tuleb käsitleda kui ühte osa ohutu vahiteenistuse korraldusest. Remonttöid, kaasa arvatud elektriseadmete, mehhaaniliste, hüdrauliliste, pneumaatiliste või elektroonsete seadmete remonti, tohib terve laeva ulatuses teha 31 ainutl vahi- ja vanemmehhaaniku teadmisel. Selliste remonttööde kohta tuleb teha vastav sissekanne masina päevaraamatus. Kõik masinavahi liikmed peavad teadma oma kohustusi. Vahimehhaanik peab olema veendunud, et iga masinavahi liige teab laeva kohta järgnevat, kuid mitte sellega piirnevat: - oskama kasutada laeva siseside vahendeid
e) Vulkaniseerimine. Keemiline protsess, kus lisatakse tavaliselt väävlit, et muuta kummi omadus. Suurenevad tugevus, elastsus, vastupidavus hõõrdele, kuumusekindlus ja keemiline vastupidavus. Peaaegu täielikult kaob kautsuki plastilisus. Eristatakse kuuma ja külma vulkaniseerimise protsessi. (Vulcan Rooma tulejumal) 6. Värvi-lakikihi pinnale kandmise tehnoloogilised võtted. a) Pneumaatiliste seadmete abil. Laialdaselt kasutatav, väikesed värvi tilgad koos õhuga suunatakse värvitavale pinnale. b) Värvimine elektriväljas. Värvi või laki mikroosakesed laetakse negatiivselt ja kõrge pingega alalisvoolu väljas liiguvad mööda välja jõujooni kaetavale pinnale. c) Värvimine kastmise teel. Detailide kastmine vastava viskoossusega materjali ja sellele järgneb nõrgutamine elektriväljas. d) Joa all üle valamine
tolmpõlevkivituhale hakati Kundas tootma kõrvalsaadusena tolmtuhka. Seda hakati nimetama klinkritolmuks. 20 Väetamise põhimõtted, väetised ja väetamine Katrin Uurman 2014 Esialgu oli suureks probleemiks tolmjate lubiväetiste põllule toimetamine, sest puudus vastav tehnika ja tehnoloogia. Lahendus tuli 1964. aastal, kui nende transport ja külvamine lahendati pneumaatiliste tsemendiveotsisternide baasil. Nõukogude aastatel jõuti Eestis teha kuni 6 lupjamise ringi ja näiteks 1968. aastal lubjati 70000ha, mis rahuldas täielikult happeliste muldade lupjamise vajaduse. Kuna tolmpõlevkivituhas on neutraliseerivaid ühendeid enamasti oksiididena, siis soovitatakse mulda lubjata tolmpõlevkivituhaga vähemalt 2 nädalat enne kultuuride külvamist või taimede istutamist. Taludes kasutamiseks on eriti perspektiivsed killustikutööstuse saadused paekivi- ja
Vibratsiooni vähendamine: · Vibratsiooni tekitava protsessi asendamine mõne teise tehnoloogilise protsessiga, näiteks neetimise asendamine keevitamisega. · Käsiinstrumendi vibratsiooni vähendamine vedrudest või kummist amortisaatorite abil, mis monteeritakse tööriista korpuse ja käepideme vahele · Töödeldava detaili kinnitamine: näiteks kummist alus töödeldava detaili all vähendab vibratsiooni kui ka müra · Raskete pneumaatiliste instrumentide kinnitus statiivile · Konstruktsioonide jäikuse vähendamine vahelagede vibratsiooni nõrgendamiseks · Masinate ümberpaigutamine tööruumis · Isikukaitsevahendite kasutamine Vibratsioonitõbi on Eestis praegu kõige sagedamini diagnoositav kutsehaigus ja moodustab kõigist kutsehaigustes umbes 1/3. peamiselt avastatakse seda endisel traktoristidel ja teistel põllumajandustöötajatel, samuti autojuhtidel, teedeehituse masinistidel.
jõudlusega aga ka kiiresti pöörlevate mehhanismide käitamiseks. Pneumaatilised täiturid ei sobi õhu kokkusurutavuse tõttu positsioneerimiseks ja täpseteks liikumisteks. Hüdraulilised täiturid töötavad tihtipele rõhu all oleva õliga, mis ei ole kokkusurutav. Hüdraulilised täiturid võivad arendada väga suuri jõude ning omada suurt kolvikäiku. Hüdrauliliste täiturite puuduseks pneumaatiliste täiturite ees on nende keeruline ehitus ning suur hooldusvajadus. Nendele lisaks kasutatakse tänapäeval selliseid täiturmehhanisme, kus jõud saadakse teatud materjalide deformatsioonil elektromagnetvälja või soojuse toimel. Nendeks on näiteks piesoelektrilised täiturid, mis deformeeruvad elektrilise pinge rakendamisel sellele. Samuti kasutatakse magnetostriktiivseid täitureid, mis deformeeruvad kui asetada nad magnetvälja
Liiver aset. liivrikonveierile vet.kontrolliks. Lihakeha poolitamine. Eristatkse 2 meetodit: · Klassikaline ogajätked ja selgroolülid saetakse pooleks keskjoonelt ning teiselt poolt jäävad ogajätked seotuks seljalihaste, sidekoe ja pekiga. Soov. Ene läbi lõigata seljalihased saagimine sirgjooneline · Ralimine eesmärgiks on eraldada selja pikim lihas koos seda katva sidekoelise kelmega. Sigade lihakehad saetakse pooleks elektri- või pneumaatiliste saagidega. Pea on soovitav poolitada hüdraulilise peapoolitaja abil. Tapajärgne vet.kontroll. Läbi viib vet.inspektor. Vaadatakse: · Pead · Nähtavaid lihaseid eriti reie- ja seljalihaseid, kõhuõõne seina · Liigeseid · Nähtavaid luid ja lümfisõlmi · Nahka · Rasvkude · Rinna- ja kõhukelmet · Vahelihast · Vajadusel palpeeritakse, tehakse sisselõikeid Samal ajal ka kontroll liivri ja soolekonveieril
..0,7 MPa. Toodetakse ka seadmeid (naela löömiseks betooni ja terasesse, kus õhurõhk on kuni 3 MPa. Mootori konstruktiivse lahenduse poolest on pneumomootorid: -rootormootorid; -turbiinmootorid; -kolbmootorid . Rootor- ja turbiinmootoreid kasutatakse peamiselt pöörleva liikumise saamiseks. Kolbmootoritest on enam kasutatavad silindris vabalt liikuva kolviga mootorid löök- või löökpöördtoimelise liikumise saamiseks. Pneumaatiliste käsimasinate eeliseks elektriliste ees on eelkõige nende ohutus ja konstruktsiooni lihtsus, mistõttu on nende hind tunduvalt madalam. Lisaks väike gabariit ja mass, suur töökindlus, kannatavad lühi- ja pikaajalist ülekoormust, võima- lus kasutada igasugustes tingimustes (tolm, niiskus, vesi). Paremad ekspluata- tsioonilised parameetrid (eriti lööktoimega seadmetel) võrreldes elektrilistega. Olulisemaks puuduseks on pneumomootorite suhteliselt väike võimsus ja väga suur
päästab vaid iseennast unustades koostöö ja teiste abistamise. Distsipliini, organiseerituse ja korra hoidmiseks võib osutuda otstarbekaks osale ohvitseridest, kes juhivad evakueerimist ja inimeste paatidesse paigutamist, välja anda relvad (kui neid laevas on), mille olemasolu nad ei pea varjama. Katastroofide statistika näitab, et ajafaktor omab avarii korral teatud rolli selles mõttes, et aja möödumisega kasvab ka laeva hukkumise tõenäosus. Pääsemise tõenäosust aga suurendab pneumaatiliste parvede kasutamine organiseeritud grupis 4-7 korda, päästepaadi kasutamine aga isegi 47 korda. Käitumise moraalsete ja eetiliste normide aluseks on nende otstarbekus. Mängude teooria seisukohast on nende normide täitmine kasulik kõigile: neile kelle suhtes neid järgitakse kui ka neile kes neid järgivad, kuna küsimus seisneb lõpuks optimaalses tegevuse strateegias. Laevaavariid on selle teooria õigsust tõestanud.