Elektropneumaatika alused (0)
ELEKTROPNEUMAATIKA ALUSED
Õptķ
FESTO DIDACTIC
Tallinn 1997
Sisįįltõrd,,',,:, FESTO DIDACTiT
Sisukord
Į.SissejuĮratĮļS
3
5
2.Ltihitilevaade elektrotehnika põhialustest 6
saamine
2. I Elektrivoolu liigid ja elektrivoolu 6
2.Į .l Valrelduwool (AC) 6
2.l .2 AĮaļisvool (DC) 6
2'L.3 h.rĮseerįv vool 1
2.2 Elektrotelrnikas kasutatavad mõõtülrikud 7
2.3 Ohmi seadus g
2.4 Elektrilise võimsuse aryĮļtarnįne g
3. Elektropneumaatika põhiskeemid l0
3.l Loogikafunktsioonide realiseerimįne l0
("Aļ\ĮD")
3.l . l Loogiline "JA" l0
3.l.2 Loogiline "VÕr' ('.oR,') Į l
3 1.3 Loogiline "EI" ("NOT") I
(mälrr)
I
3.2 Bistabiiļsuse realiseerimirre |2
3.2.Llukusrus 12
3.2.2 Mälu domineeriva "SET'' funktsiooniga Į2
3.2.3 MäĮu domineeriva "RESET,' funktsiooniga l3
4. Elektromagnetiga juhitavad pneumojaotid l5
4.l Pneumojaotite üldine ehitus 15
4.2 Yahetu juhtimisega elektromagnetiga pneumojaotid 11
4.3 Kaudse (võimerrdusega) juhtirnisega pneumojaotid Į9
5. EĮektromaņretid ja nende kommuteerimine 24
5.1 EĮektromagneti tÖöpõhimõte 24
5.2 AlalisvooĮu elektrornaņetid 24
5.2.lAlakisvooļumaņetite iseloomustrrs 25
5.2.2AlaĮisvoolumaņetitekomrnuteerimine 25
5.3 Vaheįduwoolu elektromagnetid 27
5 3.1 Vahelduwoolu magnetite iseloomustus 2g
6 Lulitid ja releed 29
6.1 Ltilitite kirjeldamisel kasutatav tenninoloogia zg
6.2 Elektriltilitite juhtimine 3
lülitįd
I
6.2.l Mehaaniliselt juhitavad 3l
6.2.2 Maņetväljagajuhitavad lįilitid 3l
6.3 ElektromaņretreĮeed 32
7. Elektroonsed andurid 34
7.ļ Ülevaade elektroonsetest anduritest 34
I .1.1 Optilised andurid 34
7 .| .2 Įnduktiivandur 15
l
FESTO DIDACTIC
'Ī
Mahtuvusandur
.l.3 36
] .|.4 Rõltuattdrrr 36
7.2 Elekķoonsete andurite elektrįskeemi ühendamine 31
7.2.l Andurite väljundiskeemid 37
1.2.2 Anduri elektriliste pzįrameetrite arvestamine 39
8 Näiteid elektropneumaatikaskeemidest 39
tingmžirgid
9. ElektropneĮļmaatikas kasutatavad 4l
10. Kasutatud kirjandus 44
Sis'sejüĮrätg3:'' :"''
FESTO DtrDACT
: l:".'' !:':
"" " I.,
Į.Sissejuhatus
Kaasaegsetes automaatįkaseadmetes on laialdaselt kasutusel automaatika-
vahendid, mis ei baseeru ainult pneumaatika komponentideĮ, vaid sisaldavaa
lisaks ka elektrilisi komponente. SelĮine kombinatsioon annab mitrneicļ
eeĮiseid võrreldes nn. "puhaste'' pneumaatikaseadmetega nagu :
l. Seoses sellega, et elektropneumaatikaseadmetes otr täitruitena kastrtuseĪ
pneumoajamid säilitavad antud seadmed kõik pneumaatiliste ajamite
poolt pakutavad eelised (tundetus ülekoormusele, lineaarsete liiļąrmistt,
Įihtne realiseerįm ine, lihtne reņleeritavĮļS, jne. ) ;
2. Elektriliste juhtimiskomponentide kasutamine võimaldab välticiil
"puhaste" pneumaatikaseadtnete üht suurįmat puudust, nimelt seadrnc.
maksumuse kįiret kasvu seadme tÖÖ algoritmi keerukuse kasvuga, kuna
elektrįliste juhtimiskomponentide maksumus võrreldes pneumaatilistega
on märgatavalt madalarn;
3. Elektriliste juhtimiskomponentide kasutamine võimaldab suhteliseįi
lihtsalt koostada üksikutest seadmetest koosnevaid automatiseeritud
komplekse;
4. EĮektriliste juhtimiskomponentide kasutamine võimaldab realiseerida
üleminekut juhtimisarvutite kasutamisele;
5. Tänu eįektriliste andurite laįemale valikule võimaldab selliste
juhtimiskomponentide kasutamine realiseerįda "puhastest"
pneumaatikaseadmetest põhimõtteliselt erinevaid automaatikasūsteeme .
Antud õpiku kasutamine eeldab eeįnevalt kursuse "Pneumaatika põhialused"
läbimist ja vastava õpiku olemasolu, kuna antud õpikus käsitletaksę
põhiliselt elektropneumaatikaseadmetes kasutatavate elektriliste
komponentide ehitust.
iĮ'įihiūlĖ ĖĮ" Įpēhiüü Įll#iliĮi-iļl''#lilil::::lii:;l.l,įitiiill:illlll:l;lli.l.iiili,ii:,:lli,r,lrsņolDm*Gņlc
2. Luhįulevaade elektrotehnika põhialustest
2.l ElektrivooĮu liigld ja elektrivoolu saamine
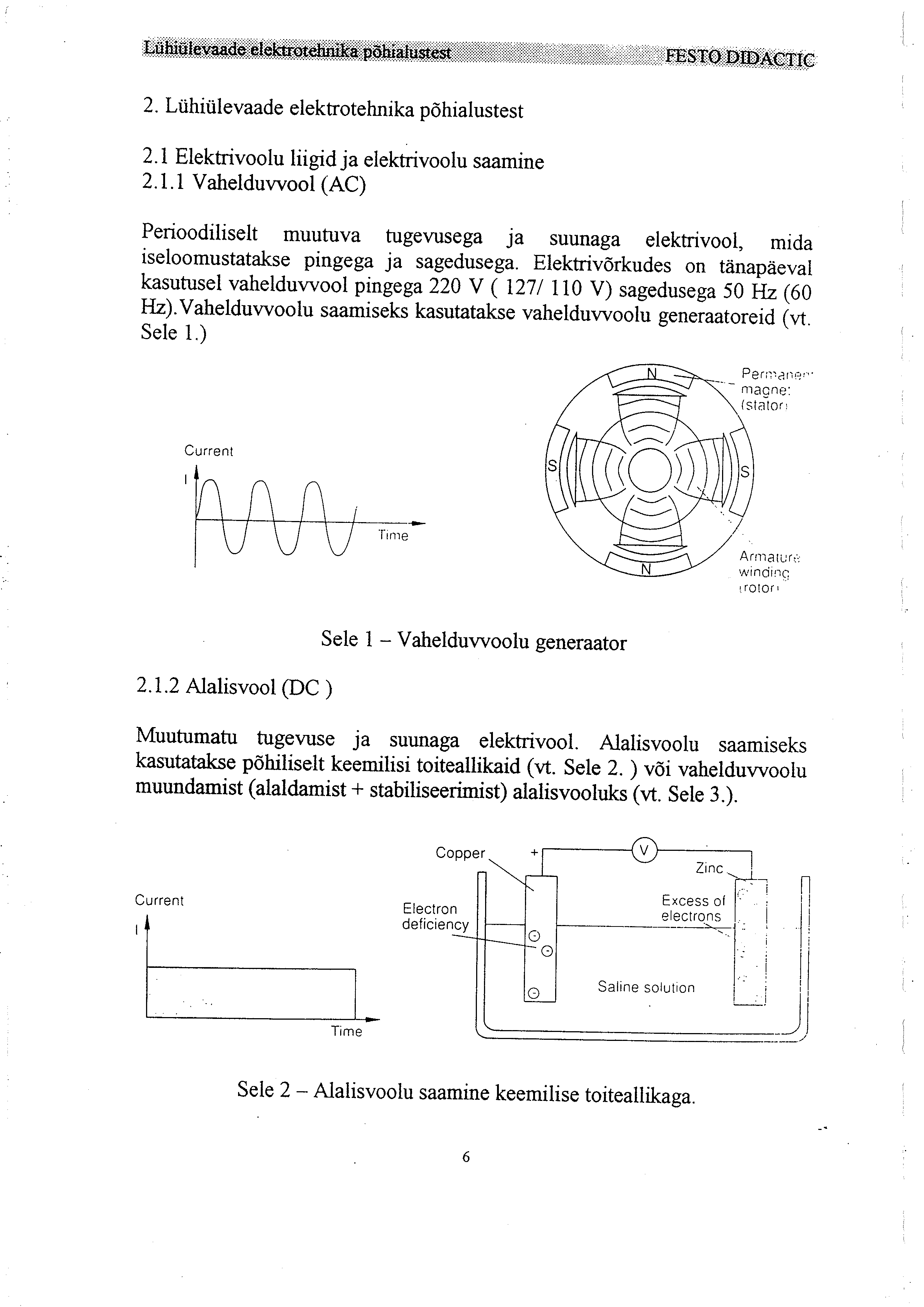
2.Į.Į VahelduwooĮ (AC)
PerįoodiliseĮt muufuva fugevusega ja
suunaga elektrivooĮ, mida
iseloomustatakse pingega ja sagedusega. Elektrivārkudes on tänapäevaĮ
kasutusel vahelduwool pinge ga 220 v ( ļ27l 1 10 v) sagedusega 50
Hz (60
Hz). VahelduwooĮu saamiseks kasutatakse vahelduwooū geneäatoreid
Sele 1.) įw.
Current
(ioį)
SeĮe 1 _ Vahelduwoolu generaator
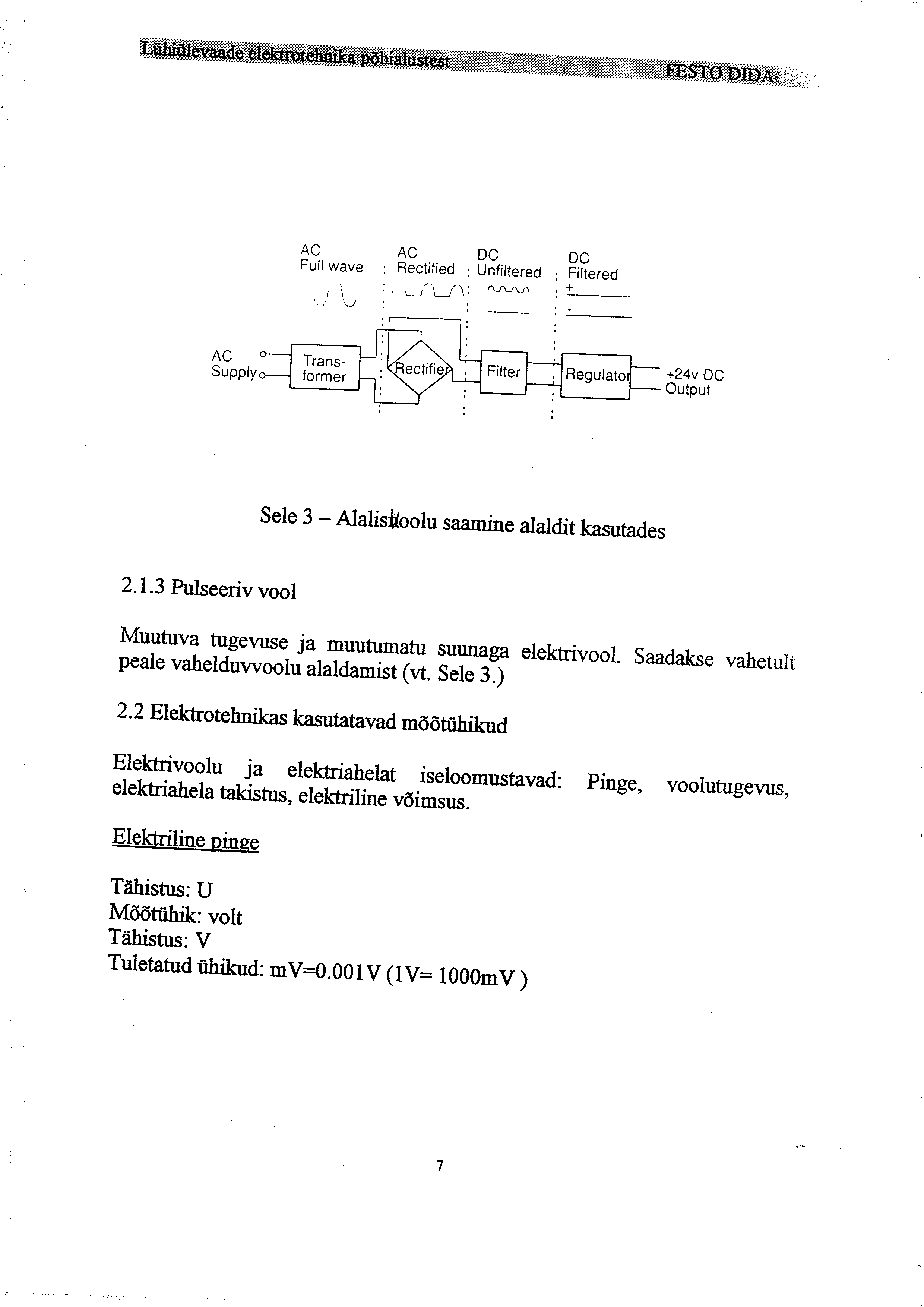
2.l.2 AlalisvooĮ (DC )
Muutumatu tugevuse ja
suunaga eĮektrįvool. Aļalisvoolu saamiseks
kasutatakse põhilisett keemilisi toiteaĮlikaid (vt. Se1e 2. või vahelduwooĮu
)
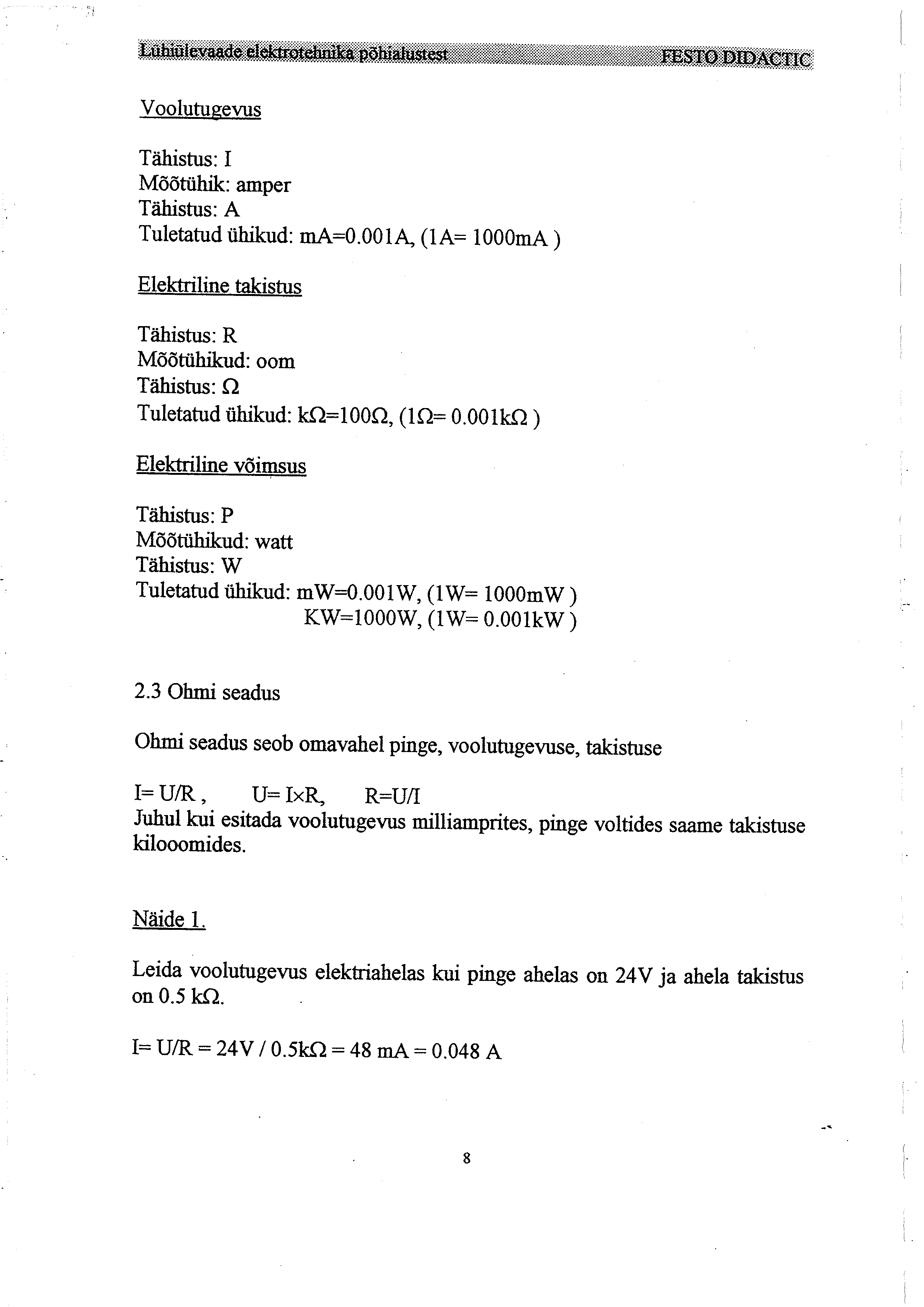
muundamist (alaldamist + 516Ļį1iseerimist) alalisvooluks
įvt. Sele 3. ).
Current
Saline soļulion
Time
Sele 2 _ AļalisvooĮu saamine keemilisę toiteallikaga.
Ąv
AT\
Uv DC
Full wave ; Rectified ; Unfiltered Fiļtered
;ļ \_/ \--_/ 'ĻJ ,'1, ^^/\,\ l
+
:
i,
ļ;
AC Trans-
Supply former Fiļter Regulato +24v DC
Output
Sele 3 _ Alalisįoolu saamine alaldit kasutades
2.1.3 Pulseeriv vool
Muufuva tugewse ja muufumatu suunaga elekhivool.
peale vahelduwootū -_-'_l saadakse vahetult
ahldamiJĪ"t. s.r" :]'
2.2 Elektotehnikas kasutatavad
mõõtühikud
3į:ff#"iļŲ3*:LĪffi;3Ļ,ä:*:"*avad: Pinge, voolutugews,
Elektritine pinge
Tįįhisfus: U
Mõõfūhik: volt
Tähisfus: V
Tuletatud uhikud: mV=0.001V
(lV: l000mV )
Voolutugevįļs
Tįüistus: I
Mõõtühik: amper
Tįįhistus: A
Tulętatud ühikud: rrA:0.001Ą (1A- 1000mA )
EĮektriline takistus
Tįüistus: R
Mõõtįįhikud: oom
Tįihistus: o
Tuletatud ühikud: kCļ:lO0Q, (1Q: 0.001kO )
Elektrįline võimsus
Tahisķ5' p
Mõõttüikud: watt
Tähisfus: W
Tuletafud ühikud: mW:0.001W, (lW: 1000mW )
KW:1000W, (1W: 0.00lkw )
2.3 Ohmi seadus
ohmi seadus sęob omavahel pinge, voolutugevĮĮse, takistuse
I: U/R, U: IxĻ R:U/I
Juhul kui esitada voolutugews milliamprites, pinge voltides sįuįmę takistuse
kilooomides.
Nriide l.
Leida voolutugevus elektriahelas kui pinge ahelas on 24Yja ahela takistus
on 0.5 kf).
I: UIR - 24Y / 0.5kO : 48 mA: 0.048 A
Nzįide 2.
Leida elektriahela takisfus kui kuį pinge 1l0 v juures läbib ahelat vooi
fugewseņ 800mA
R: U/I : 1lOV / 800 mA: 0.138 į
2.4 Elektrilise võimsuse arvutamine
Elektrilise võimsuse, pinge, voolu ja takistuse seovad omavahel järgnevaei
valem,
P:UxI:ūrn:12xĻ
Kus pinge on esitatud voltides, voolutugevus ampritęs, takistus oomides ja
võimsņ wattides.
Näide 3.
Milline on elektritarbijat täbiv voolufugews kui tarbija poolt tarbita'
võimsus pingel 24v võrdub 1.5 w.
I :P / U : 1.5 W / 24V : 0.063 A: 63 mA.
:nt ffiii,ĖiiĮ#ffiiftļilįffi*Įiii*iii*iiiiiiiiii:lg*gffi# ei
3'Elektopneumaatikas kasutatavad põhiskeemid
3. I Loogikafunktsioonide realiseerimine
Selleks et, realiseerida konkreetset juhtimisalgoritmi, kerkib esmaselt
vaj adus realis e eri da lo o gikafunktsioone eĮektriskeemi dena.
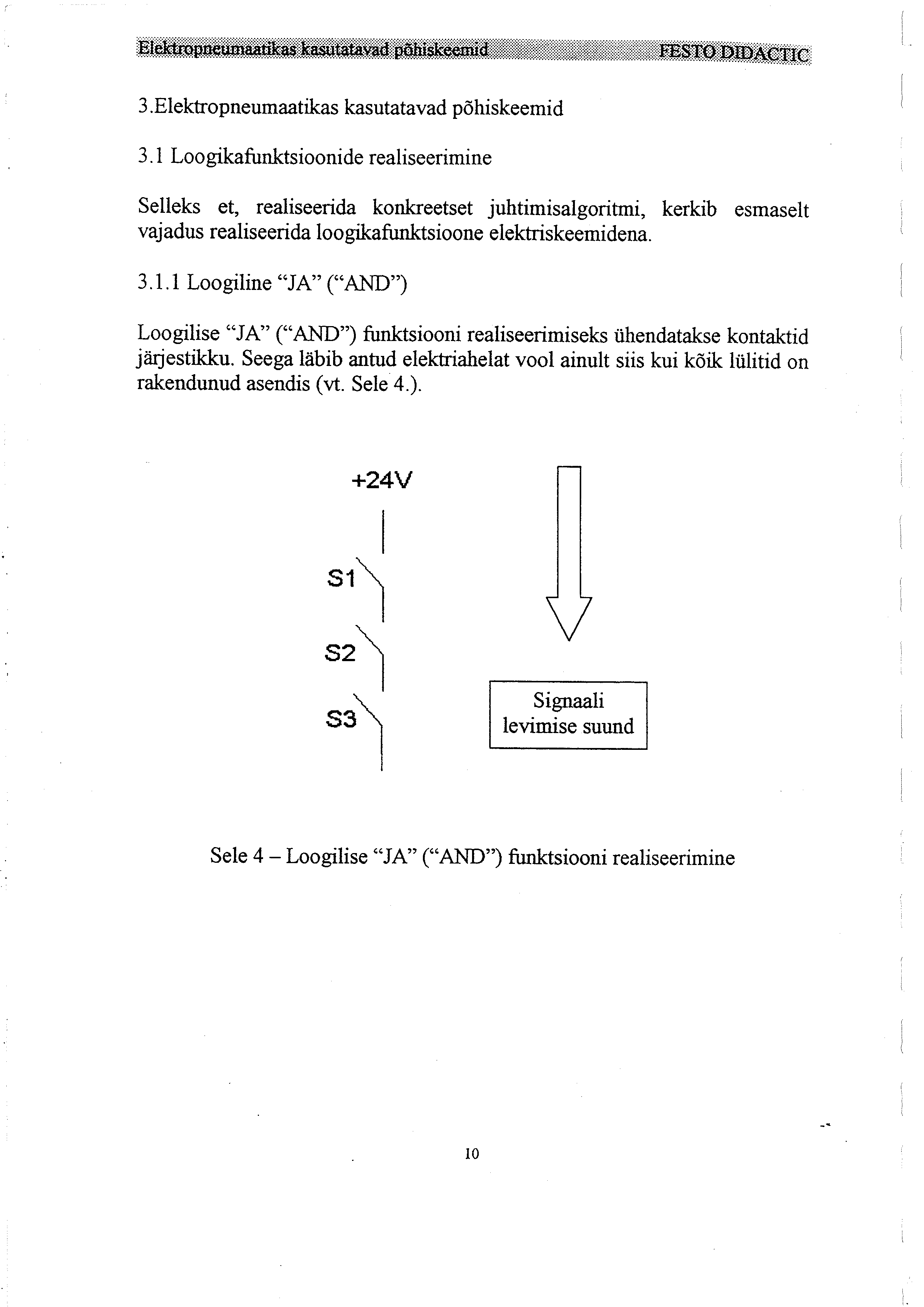
3.1 .1 Loogiline "JA" ("AND")
Loogilise "JA" ("AND") funktsiooni reaĮiseerimįseks ühendatakse kontaktid
jĘestikku. Seega läbib antud elektriaheĮat vool ainult siis kui kõik lulitid on
rakendunud asendis (vt. Sele 4.).
+24V
"r)
"r) Signaali
.) levįmise suund
Sele 4 - Loogilise "JA" ("AND") frrnktsiooni realiseerimine
t0
ffi ļ iiirrii#pr*ņģjg r;i
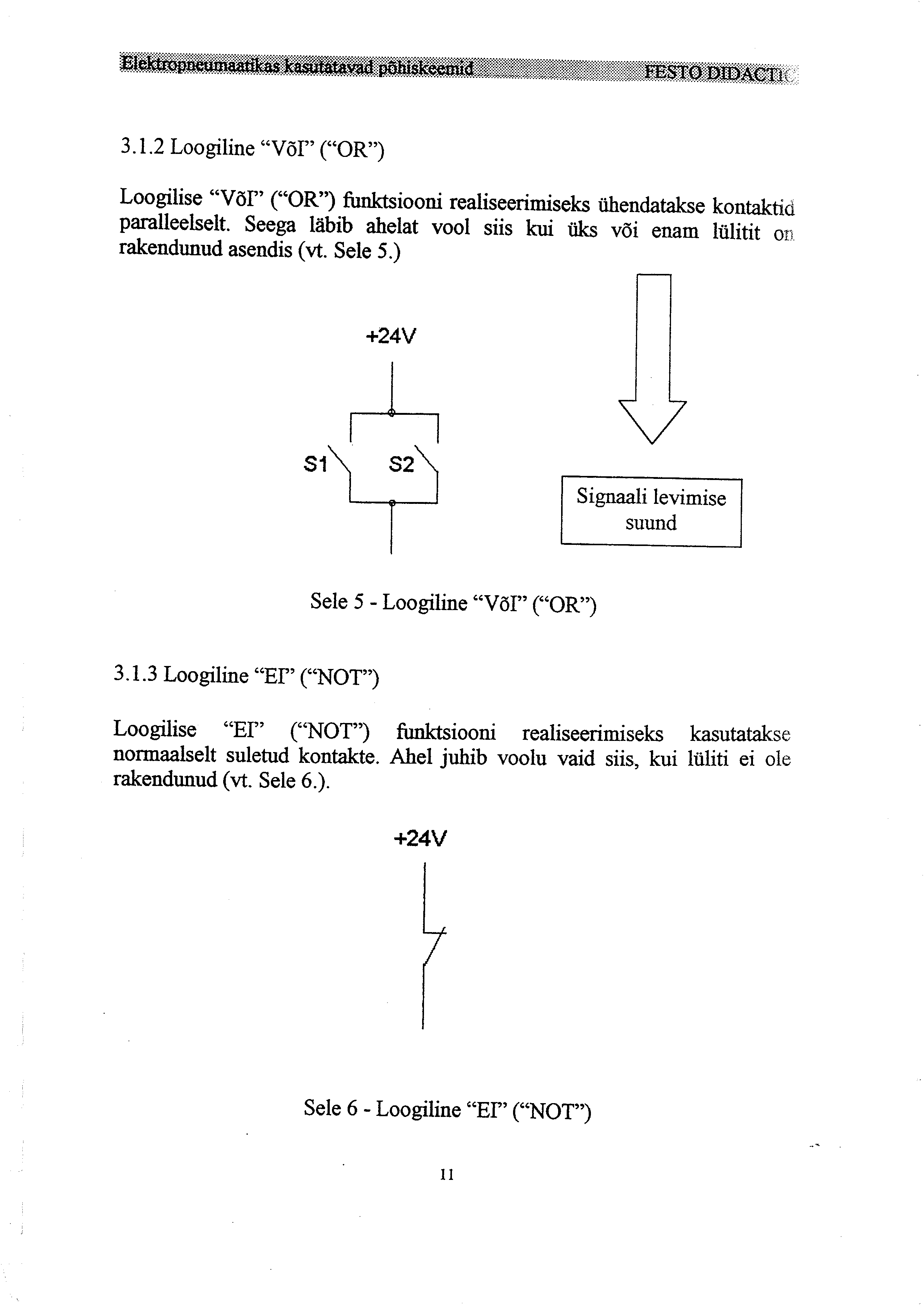
3.l.2 Loogiline "võr" ("oR")
Loogilise "võr' ("oR') funkķiooni ręaliseerįmiseks įüendatakse kontakticį
paralleelselt. Seega läbib ahelat vool siis kui üķ või enam
trilitit on
rakendunud asendis (vt. Sele S.)
+ZĻV Iļl
V
-r
Į
.r\ ,r\
Signaali levimise
suund
Sele 5 _ Loogiline "Võl' (.oR,)
3. 1.3 Loogiline "Ef' ("NOT,)
Loogilise "Er' ("NoT") funļtsiooni realiseerimiseks kasutatakse
normaalselt suletud kontakte. Ahel juhib voolu vaid siis, kui tüliti ei ole
rakendunud (vt. Sele 6.).
+24V
I
I
Ļ
/
I
ļ
I
Sele 6 - Loogiline "EI' ("NOT',)
ll
3.2 BistabiiĮsuse realiseerimine ( mälu )
EĮektropneumaatika skeemides kasutatakse mälufunktsiooni (bistabiilsuse)
realiseerimiseks tavaliselt elektrilisi komponente, kuid välistatud pole ka
realisatsioon pneumaatikas (bistabiilne pneumojaoti). Jžirņevalt on esitafud
kolm erįnevat võimalust mälu realiseerimiseks kasutades etekrilisi
komponente.
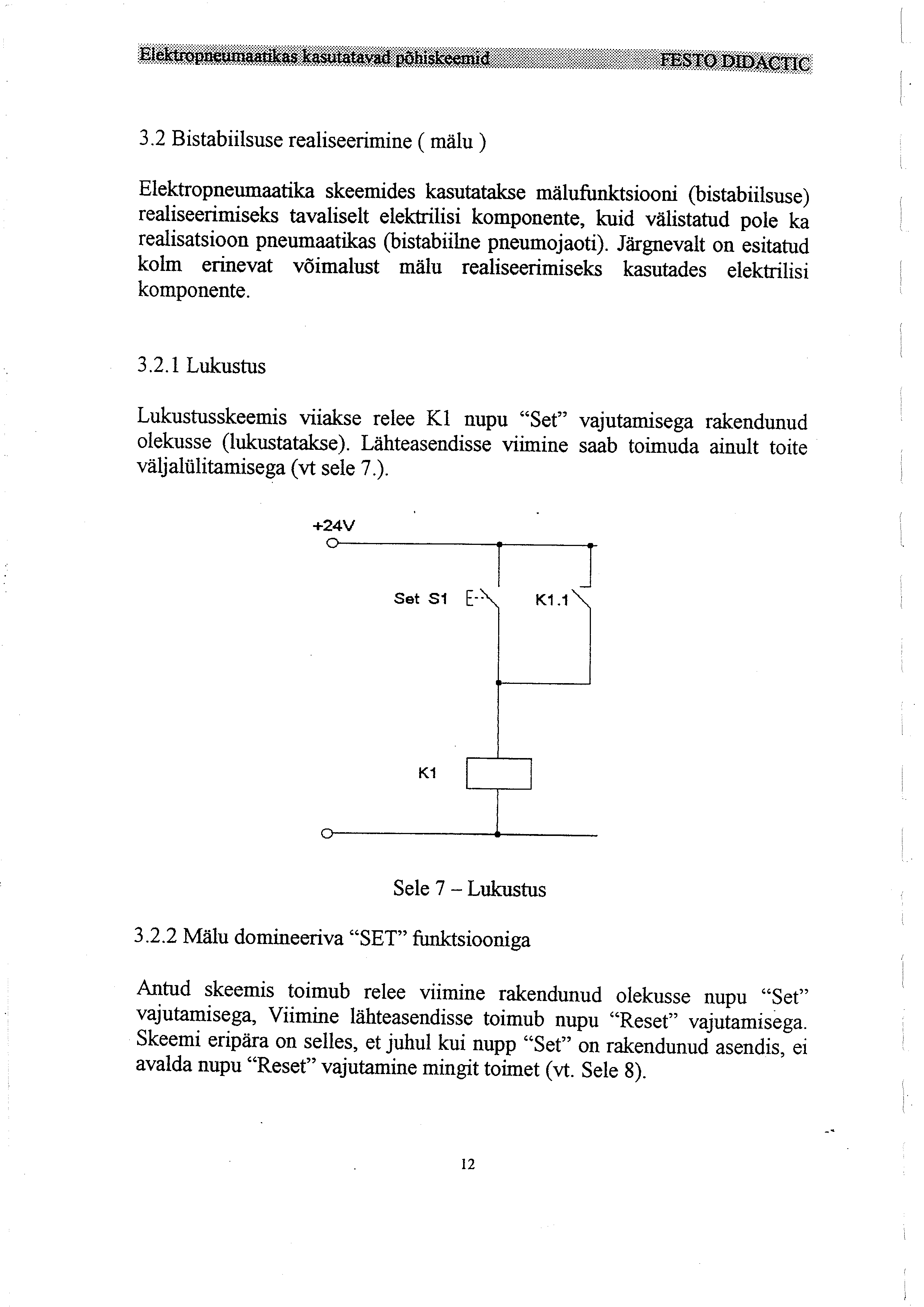
3 '2.Į Lukustus
Lukustusskeemis üiakse reĮee Kl
nupu "Set" vajutamisega rakendunud
oĮekusse (lukustatakse). Lähteasendisse üimine saab toimuda ainult toite
vaŲalülitamisega (r.t sele 7.).
+24V
Sele 7 - Lukustus
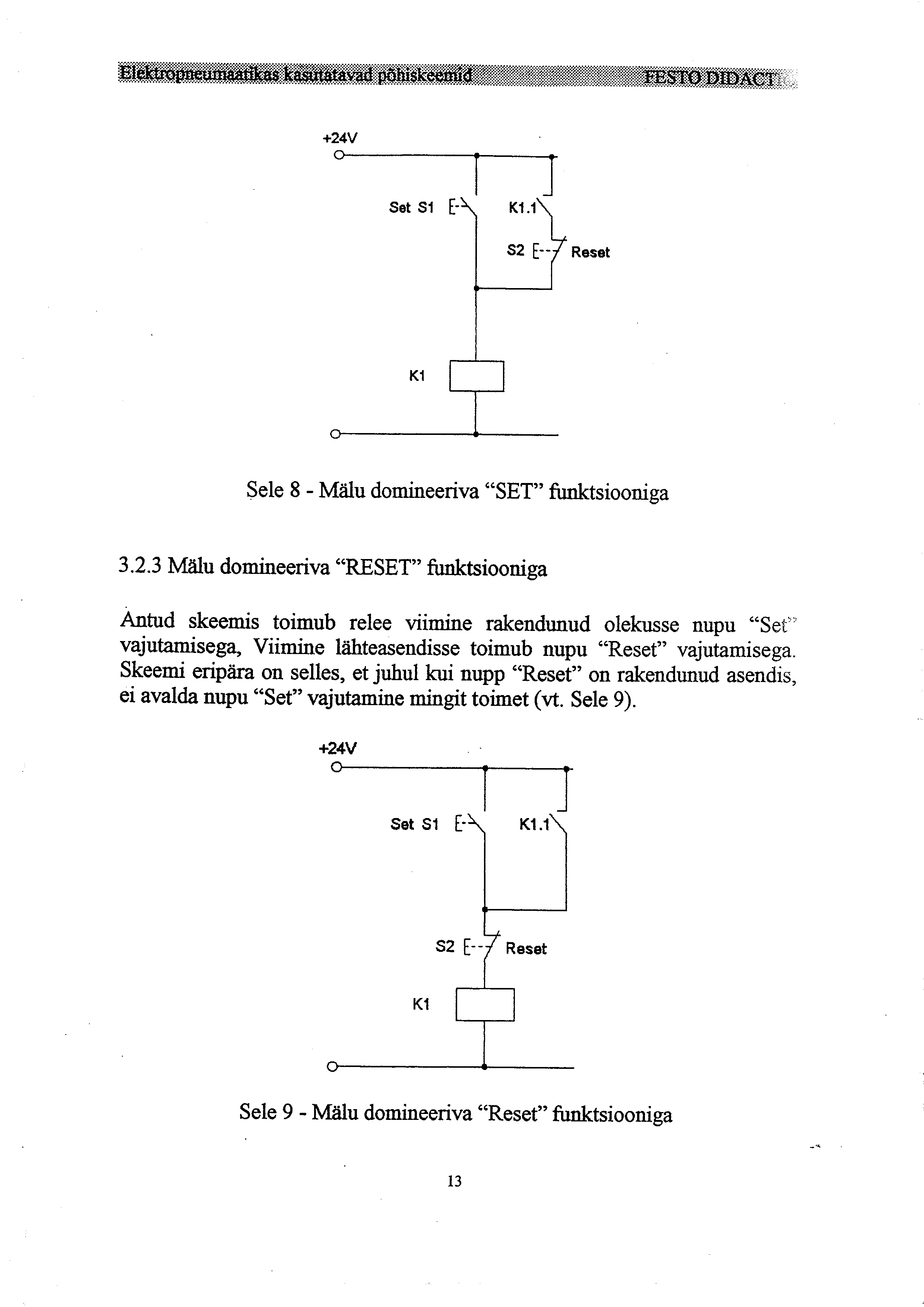
3 .2.2 Mälu domineeriva "SET" fiurktsiooniga
Anfud skeemis toimub ręlee viimine rakendunud olekusse nupu "Set"
vajutamisega, viimine lahteasendisse toimub nupu,.Reset,, vajuiamisega.
Skeemi eripära on selles, et juhul kui nupp "Set" on rakendunud asendis, ei
avalda nupu "Reset" vajutamine mingit toimet (vt. sele s).
t2
Kl.1
Sele 8 - Mälu domineeriva "SET" funktsiooniga
3 .2.3 lvIälu domin eeriva "RESET" funktsiooniga
Antud skeemis toimub relee üimine rakendunud olekusse nupu "Set"
vajutamisegą Viimine lžįhteasendisse toimub nupu "Reset" vajuūmisega.
Skeemi eripžira on selles, et juhul kui nupp "Reset" on rakendunud asendis,
ei avalda nupu "Set" vajutamine mingit toimet (vt. Sele 9).
Sele 9 _ Mįlu domineęriva "Reset" funktsiooniga
t3
*įļį#ltilffi ĮĮrfi $.ņg#.m*ęffi ei
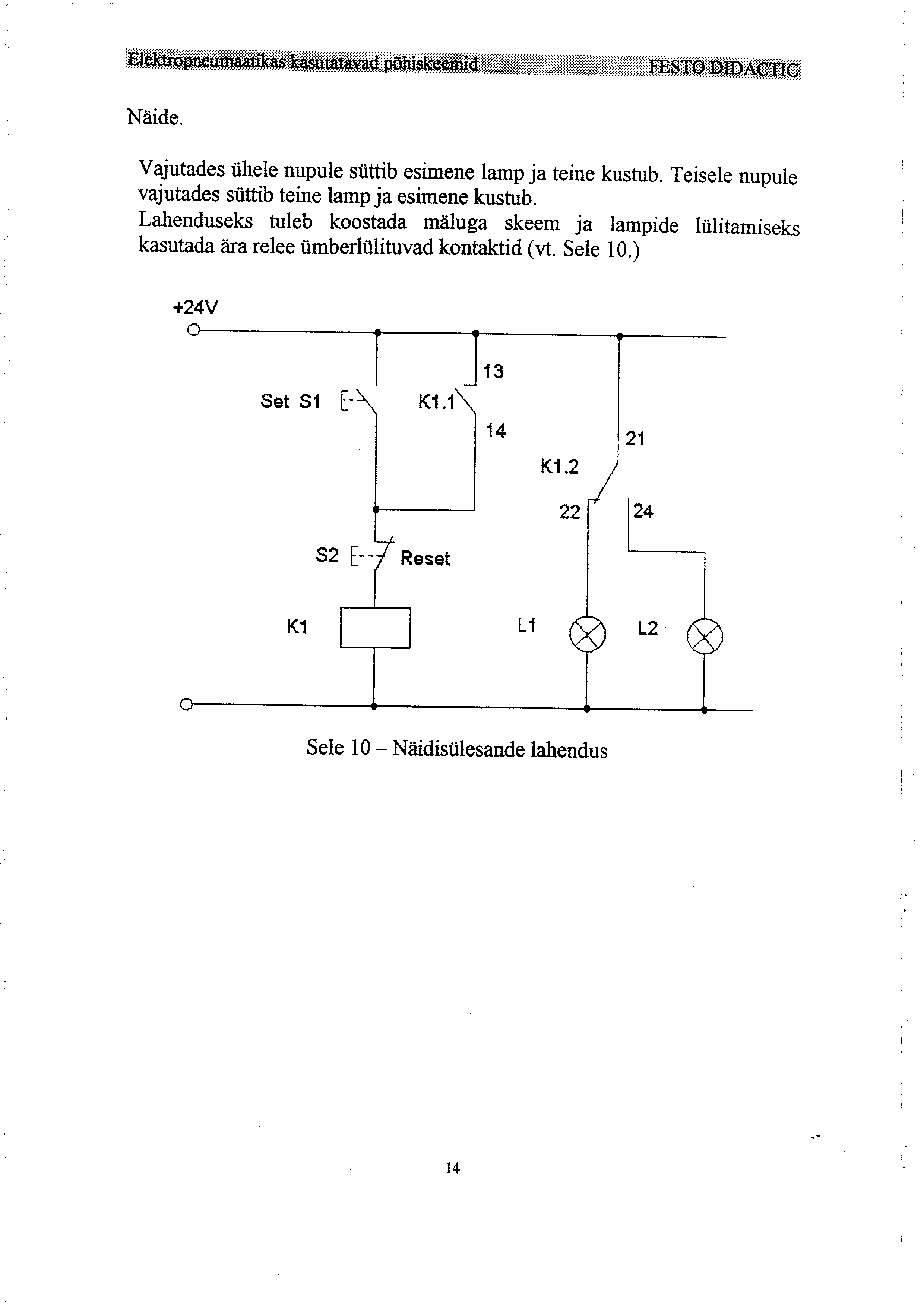
Nįilde.
Vajutades ühele nupule sütlib esimene lamp ja teine kustub. Teisele nupule
vajutades süttib teine lamp ja esimene kusfub.
Lahenduseks tuleb koostada mäĮuga skeem ja Įampide Įülitamiseks
kasutada žįra relee umberlulituvad kontaktid (vt. Sele l0.)
+24V
Sele l0 _ Nįüdisülesande lahendus
t4
4 Elekūomagnetiga juhitavad pneumojaotid
4.l Pneumojaotite üldine ehitus
Elekhomagnetiga juhitavatel pneumojaotitel on elektropneumaatika*
skeemides kaks furktsiooni
:
pneumoajami juhtimine,
- elektrisignaali muundamine pneumaatiliseks.
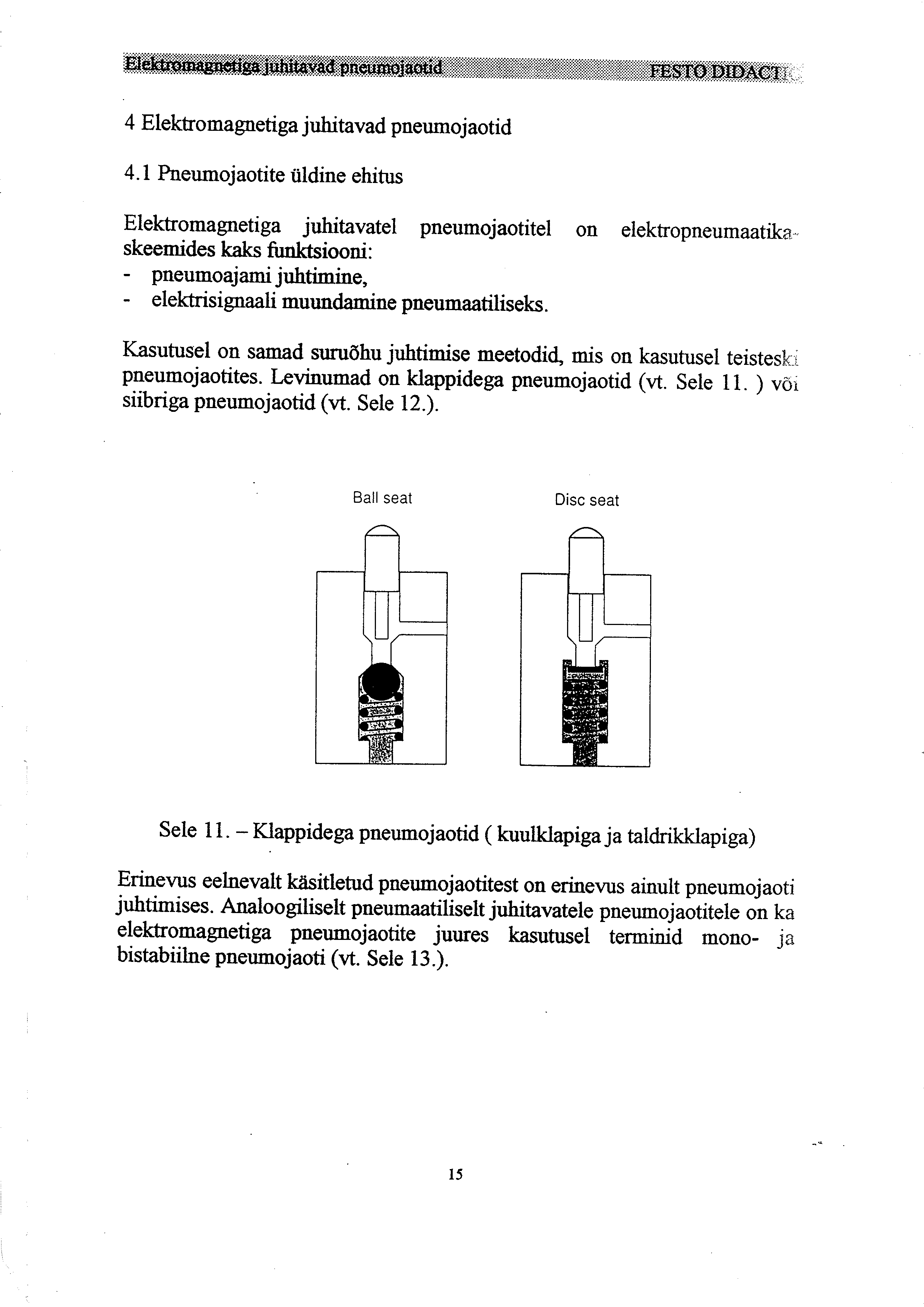
Kasutusel on samad srrruõhu juhtimise meetodiģ mis on kasufusel teistesk-i
pneumojaotites. Levinumad on klappidega pneumojaotid (vt. Sele ll. voi
)
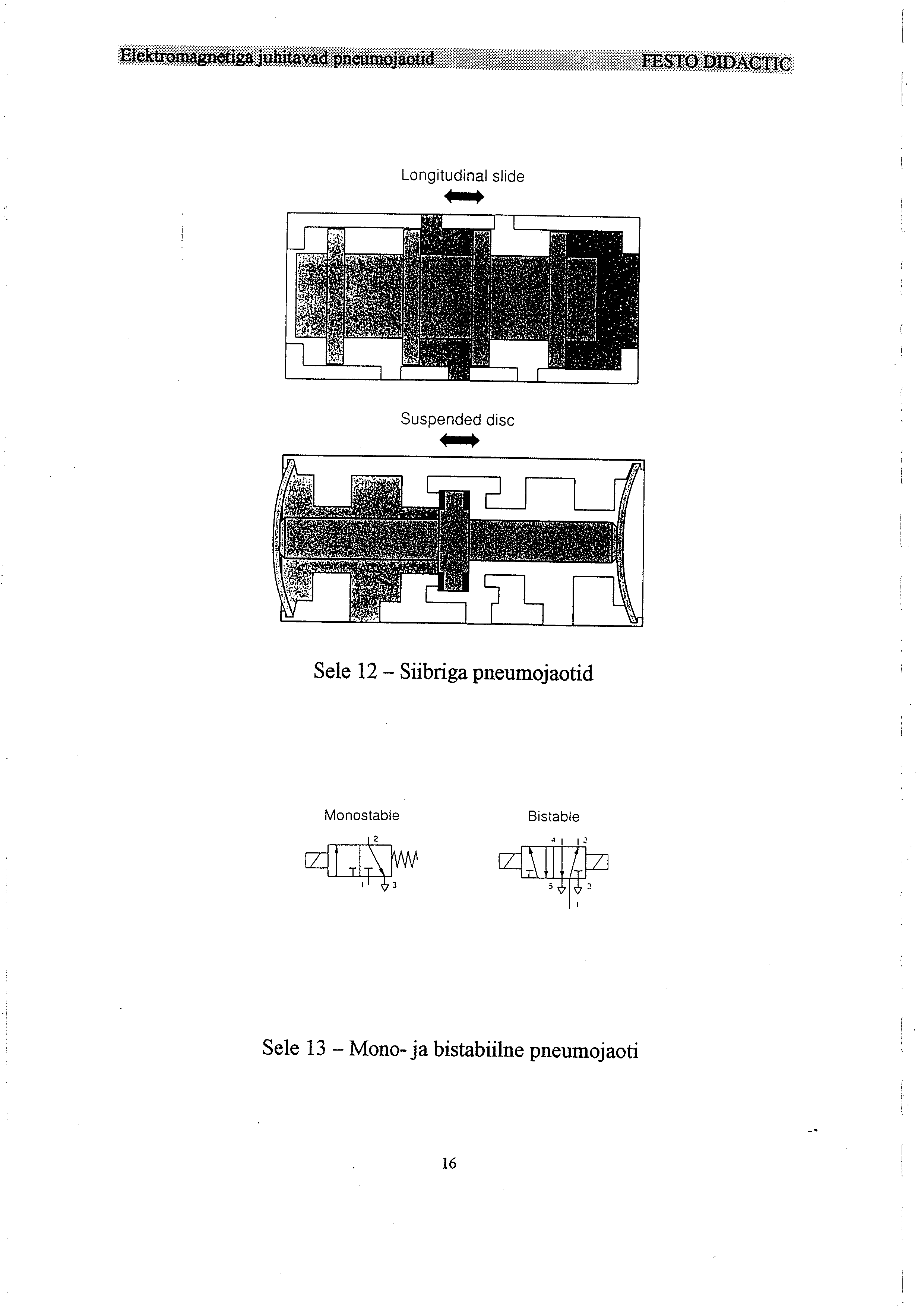
siibriga pneumojaotid (vt. Sete 12.).
Ball seat Disc seat
Sele l l. - Klappideņ pneumojaotid ( kuulklapi ga jataĮdrikklapiga)
Erinevus eelnevalt käsitletud pneumojaoütest on erinevus ainuĮt pneumojaoti
juhtimises. Analoogitiselt pneumaatiliselt juhitavatele pneumo3aätitele
_ on ka
9Įektr9magnetiga pnerrmojaotite juures kasutusel terminįd mono- ja
bistabiilne pneumojaoti (vt. Sele 13.).
t5
Longitudinal slide
-)
Suspended disc
-)
Sele 12 - Siibriga pneumojaotid
Monostable Bistabte
,. :r rl
r.ļ
ar\ \ ĮlĻ llv
lll lr?
'ü;ü .,
lr
-
Sele 13 - Mono- ja bistabiilne pneumojaoti
t6
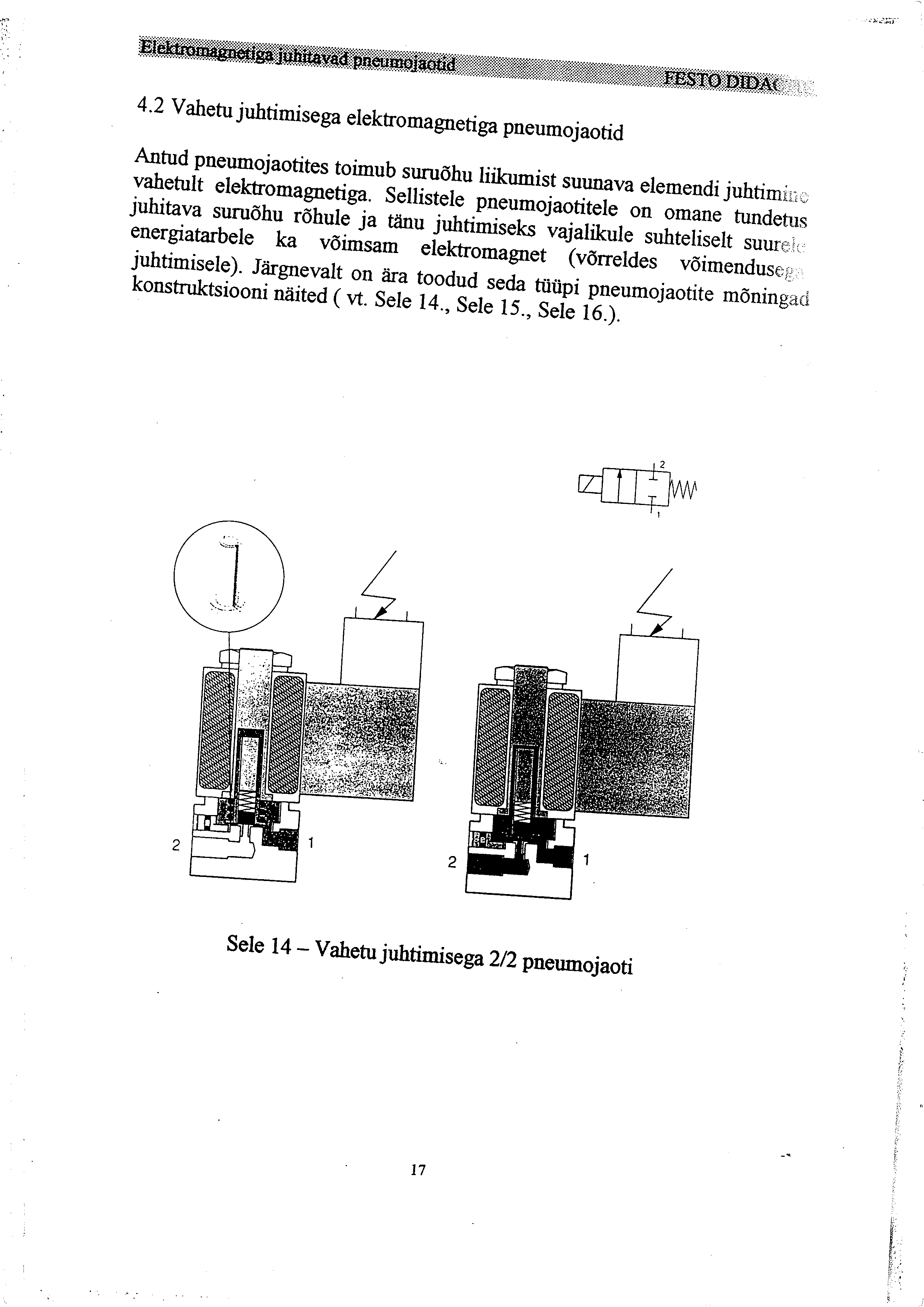
4' 2 Vahefu jūtimiseņ elektomaņetiņ
pneumojaotid
AĮtud pneumoiaotites
vahefult etektomaņedga' ,u*ņ liikumist suunava elemendi juhhmtl+
toimub
juhitava suruõhu'õnurJju s.]ķķķ
energiatarbele ka
ņĖr-.*Ie
īÄĮ'1ņtimiseks Ļajalrkūeon o*un.' tundefus
sūteĮiselt
voimsam-;ĖkürÄr"'r"õrreldes suurę,'jl'
į:i:ffi:fļ;iffiJ;ĮĪHįn*įJ't*į;1;umojaotitemõning;*ii
"ā'ir*rousęi]]:
Sele 14 - Vahetu juhtimise gaU/2pneumojaoti
t7
i;.
f,
I
ļ
r_1-f jļ ī-.,
r---1 |
,.,
7l I r_i..\_ "'
\ ,ļ;l,l1
:....'
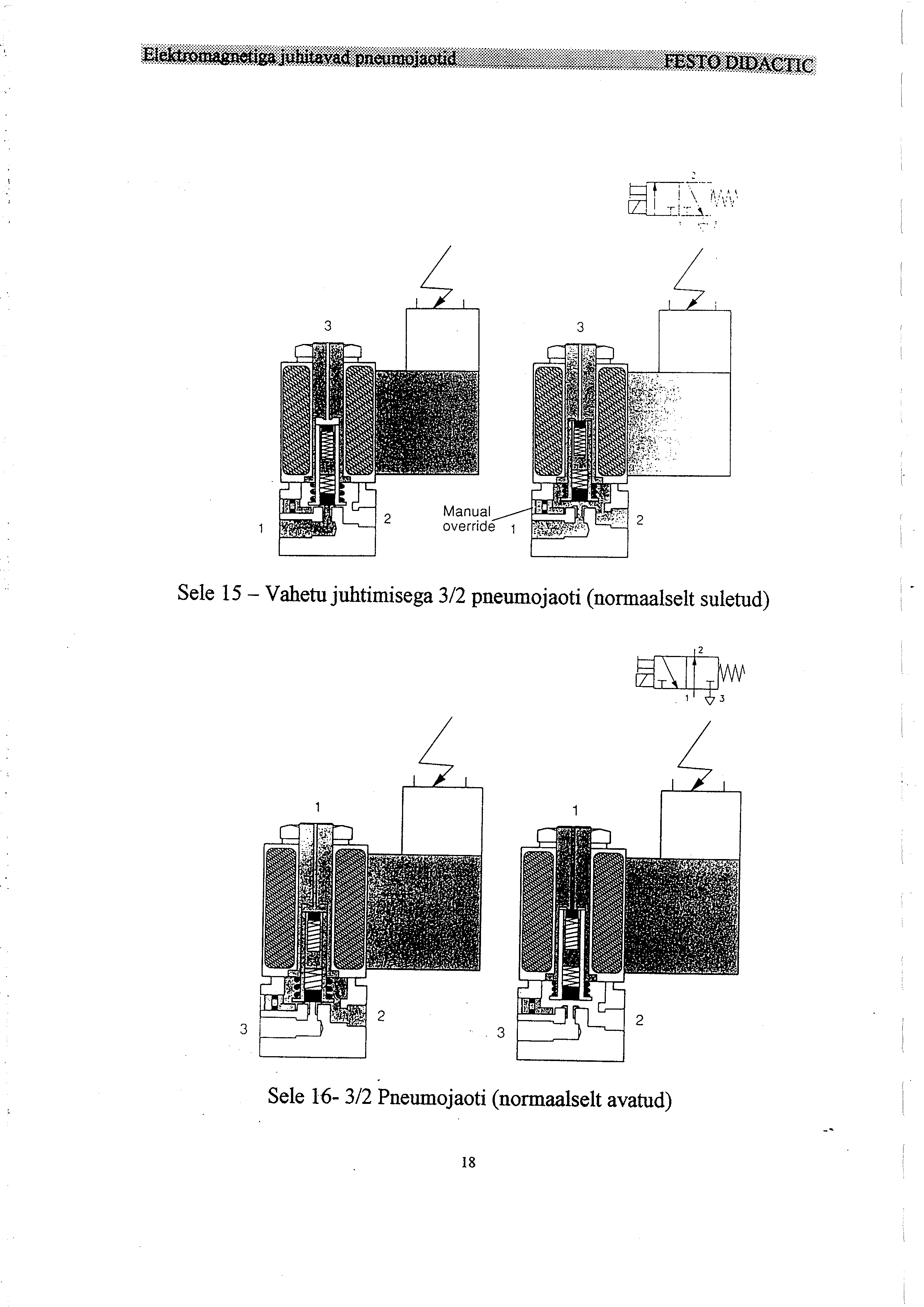
Sele 15 _ Vahetu jūtimisega3/2 pneumojaoti (normaalseĮt suletud)
Sele 16- 3/2 Pneumojaoti (normaalselt avatud)
I8
.Ēj ĮĮiliĮi1iffi įiļiiirffi iiiįļiįffi iffi F,fr i;,
4. 3 Kaudse (võimendusega) juhtimisega pneumoj aotid
EĮektromagnetiga pneumojaotite juures on kasutusel nii vahetu (vt. Sei,,,
17.), kui ka kaudne ( võimenduseņ ) jūtimine (vt. Sele 18.).
Selleks, et
vähendada pneumojaoti juhtimiseks vajalikku energiat
kasutatakse eĮekūomaņeŲaotite juhtimisel (analoogiliseĮt pneumaatilirr,
juhtimisega j aotite puhul), kaudset (võimendusega) juhtimist.
trĪ.FKTRJSIGNAAL
MõruTAB
ELEKTROMAGNETIT
ELEKTROMAGNET
MõruTAB VAHETULT
PNEUMOJAOTI
JUHTIMISELEMENTI
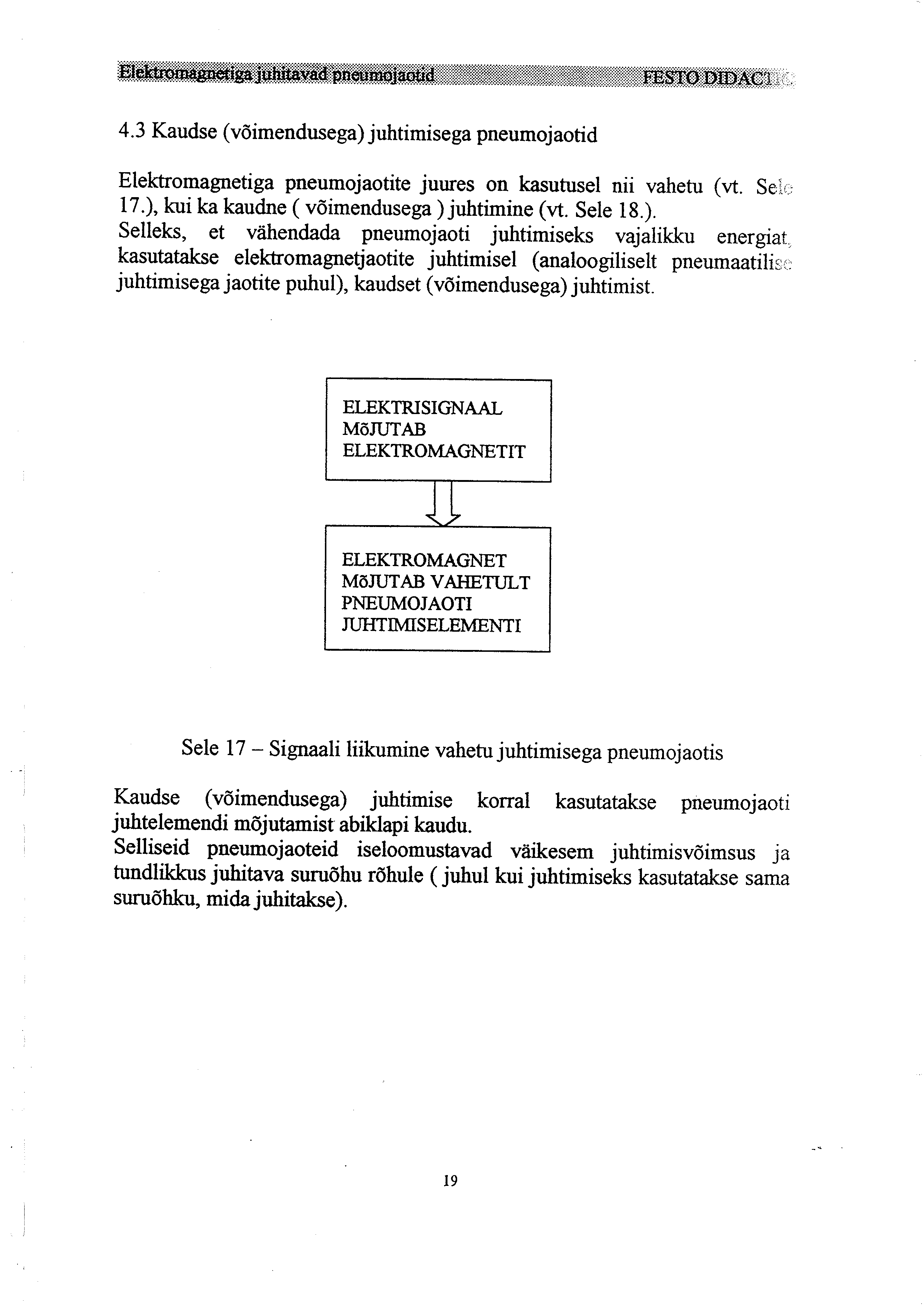
sele 17 - Signaali liikumine vahetu juhtimisega pneumojaotis
Kgudse (võimendusega) jūtimise korral kasutatakse pneumojaoti
jūtelemendi mõjutamist abiklapi kaudu.
Selliseid pneumojaoteid iseloomustavad väikesem juhtimisvõimsus ja
tundlikkus juhitava suruõhu rõhule ( juhul kui juhtimiseks kasutatakse Sama
suruõhku, mida jūitakse).
t9
g-t iiįį#fiuj*uįi:ąį,r+firt+*i iļįi*iiiįĮffi i
ELEKTRISIGNAAL
MõruTAB
ELEKTROMAGNETĮT
tt
]Į
ELEKTROMAGNET
MõruTAB VAHETULT
PNEUMOJAOTI
ABIKLAPPI
ll
ABIKLAPI KAUDU
MõruTATAKSE
PNEUMOJAOTI JUHT-
ELEMENTI
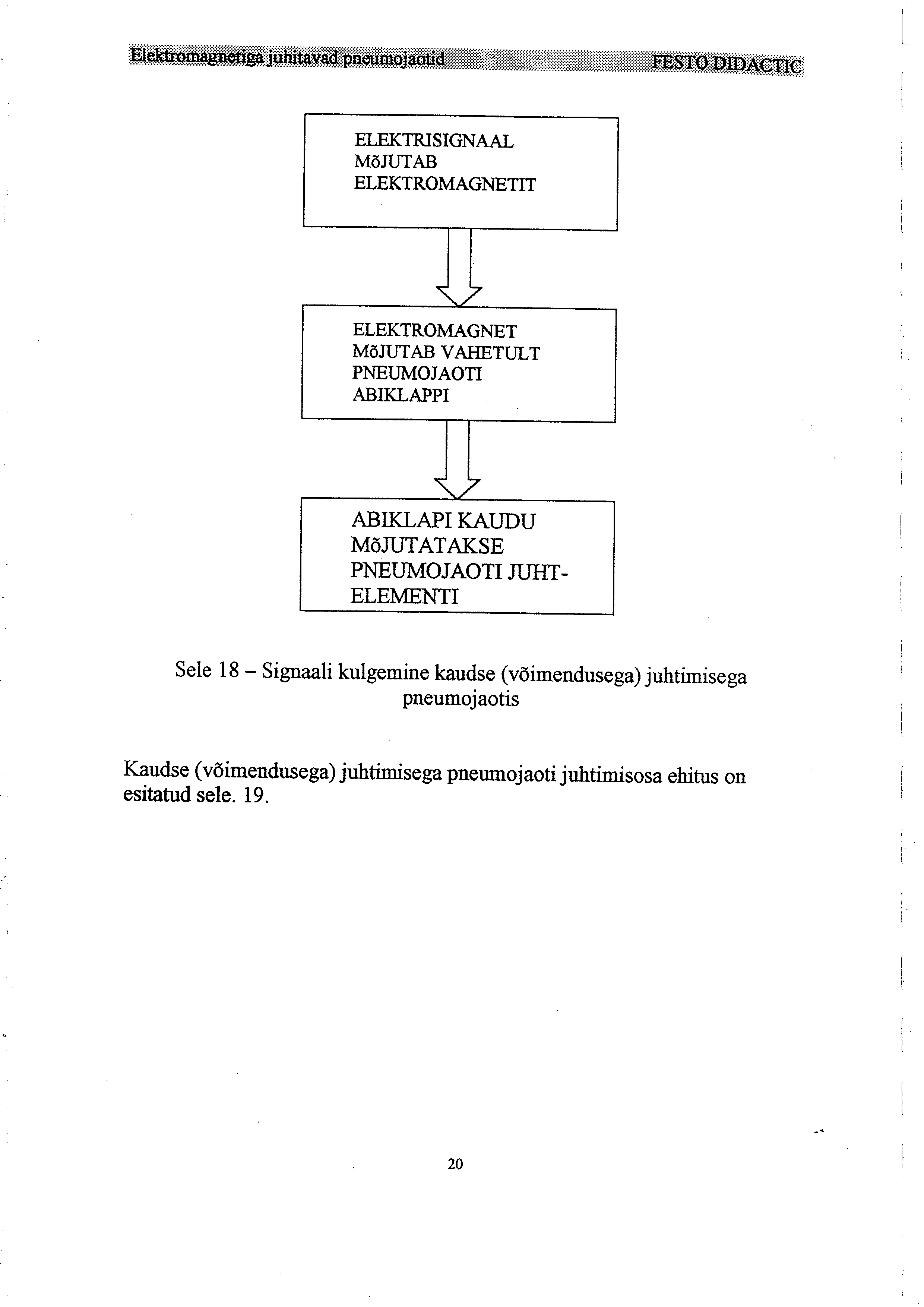
Sele 18 _ Signaali kulgemine kaudse (võimendusega) juhtimisega
pneumojaotis
Kaudse (võimendusega) jūtimisega pneĮļnįoj aoti j ūtimisosa ehitus on
esitatud sele. 19.
20
ņl #ii *jĮl*ri+iiiįt*lffi +
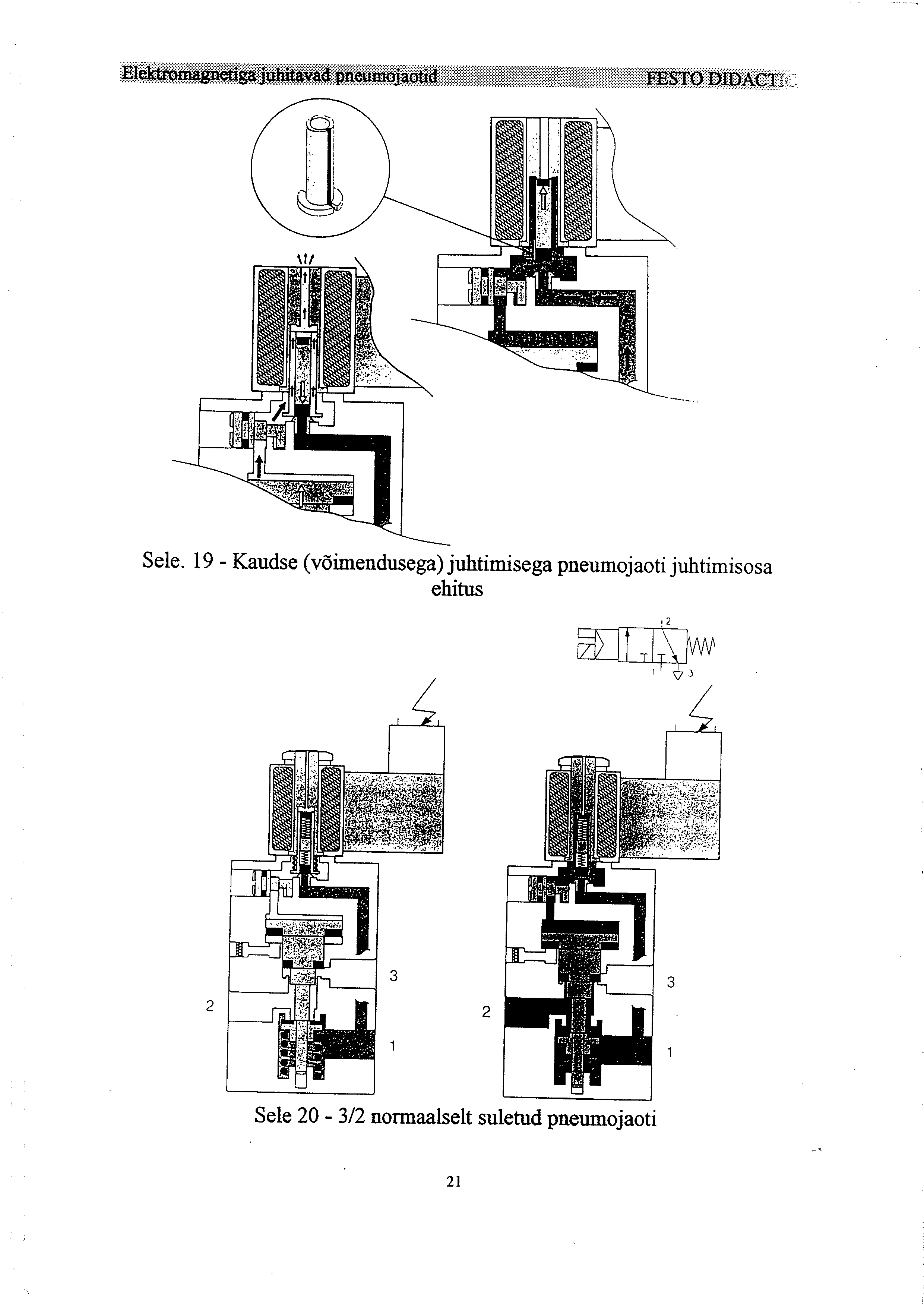
Sele. 19 - Kaudse (võimendusega) juhtimisega pneumojaoti juhtimisosa
ehitus
r_--īr_]+Ļ
'fu-ļl ,lĮ ļ.il^/
1',VJ
--.f-.r
Seįe 20 - 3/2 normaaĮselt suletud pneumojaoti
2t
iD-$" €ffie,
Z
1
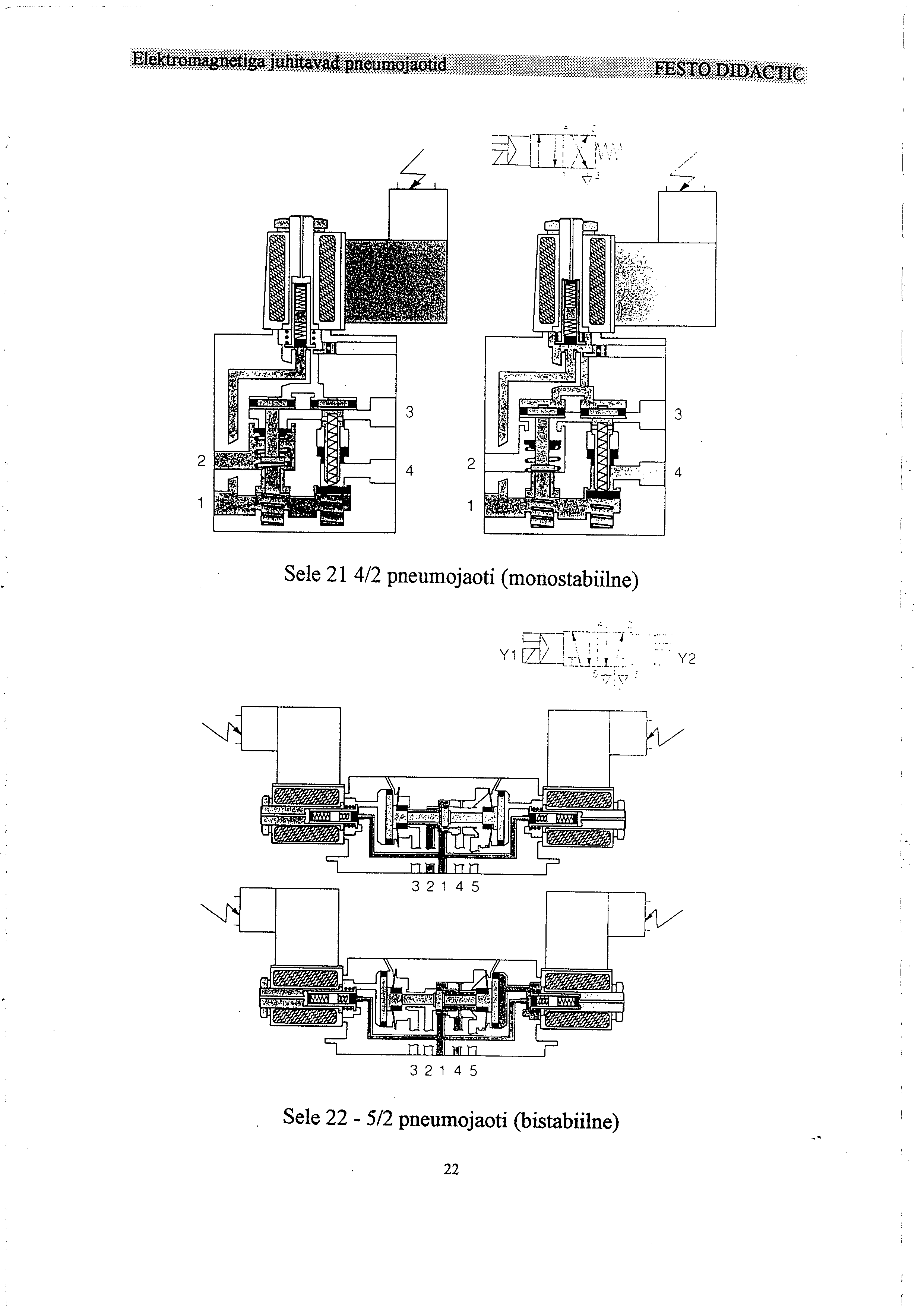
Selę 2l 4l2 pneumojaoti (monostabiilne)
32145
Sele 22 - 5/2 pneumojaori (bistabiilne)
Į:ftiįiii:ffiffig.įfi" ,
32145
3 214 5
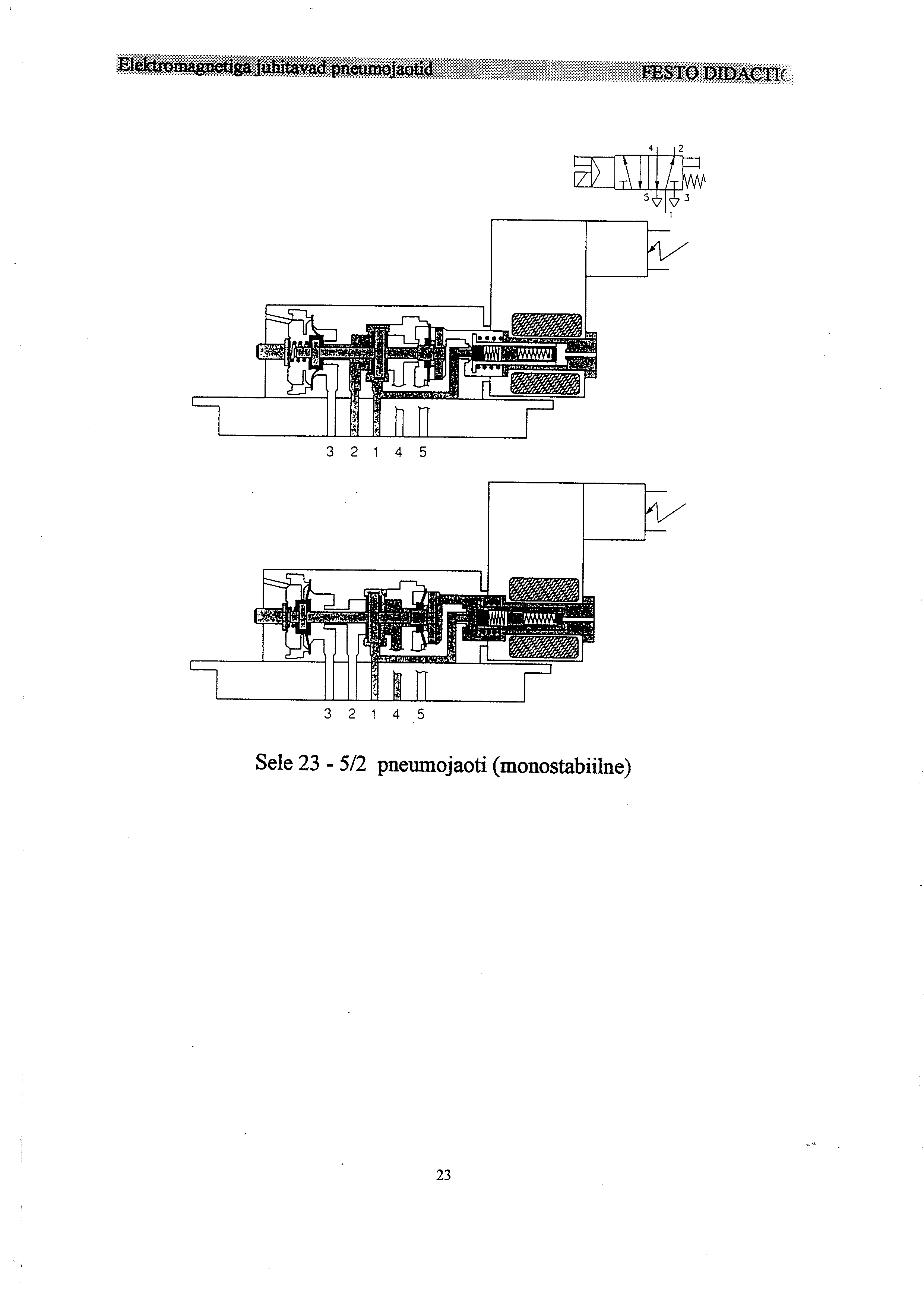
Sele 23 - 5/2 pneumojaoti (monostabiilne)
23
5 Elekromaņetid ja nende kommuteerimine
5. 1 Elekūomaņeti tÖÖpõhimõte
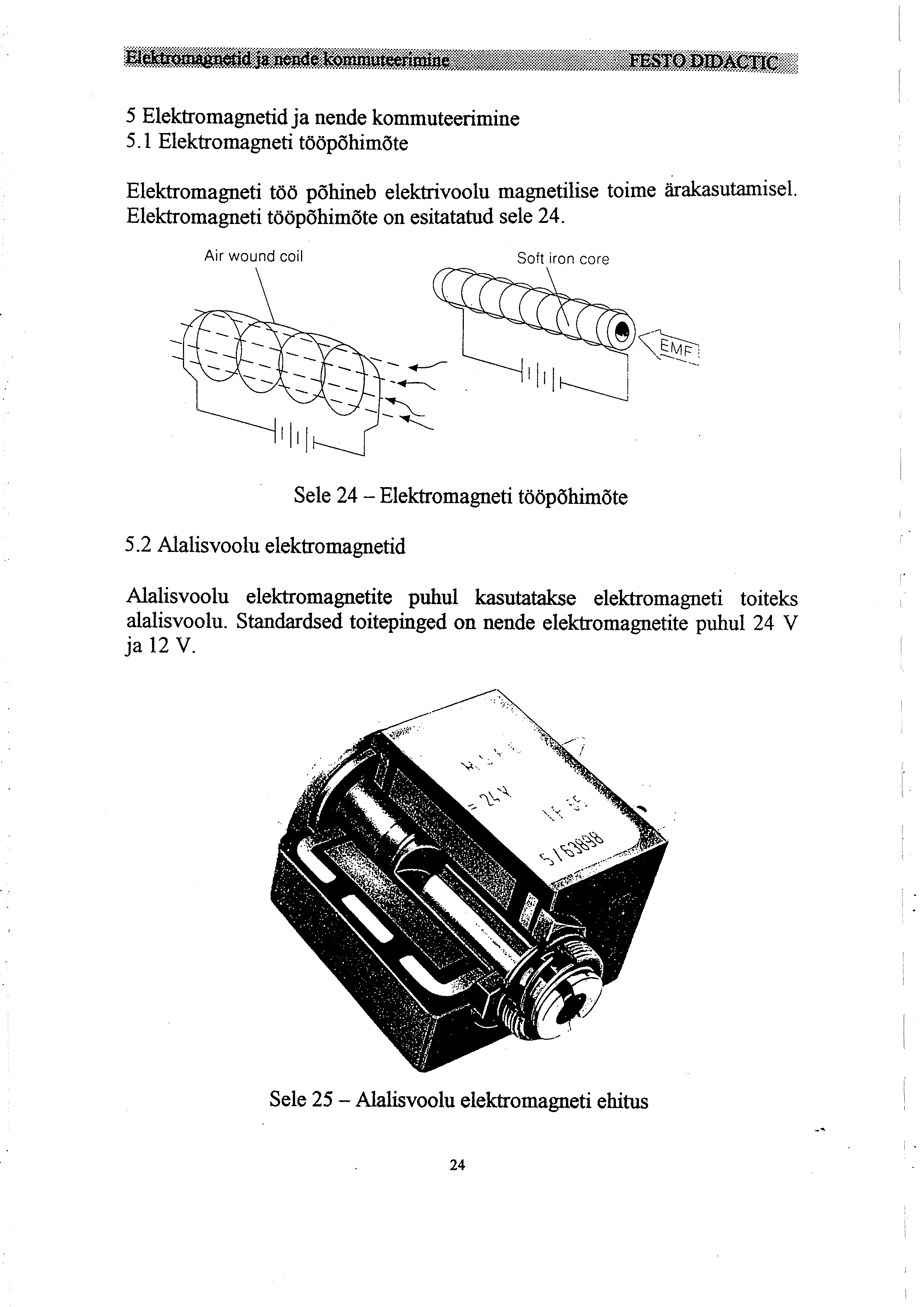
Elektromagneti töö põhineb elektrįvoolu magnetilise toįme įirakasutamisel.
Elektromagneti tÖÖpõhimõte on esitatatud sele 24.
Air wound coil Soft iron core
\
z'-Ļ-
tūĒ)
Sele 24 _ Elektromaņeti tÖöpõhimõte
5.2 Alalisvoolu elekķomaņetid
Aļalisvoolu elektromagnetite puhul kasutataļse elektromagileti toiteks
alalisvoolu. Standardsed toitepinged on nende elekūomagnetite puhul 24 v
ja 12 Y.
'i.. "
Sele 25 _ Alalisvoolu eįekfomagneti ehitus
ffi ffiffi"trtfffffi
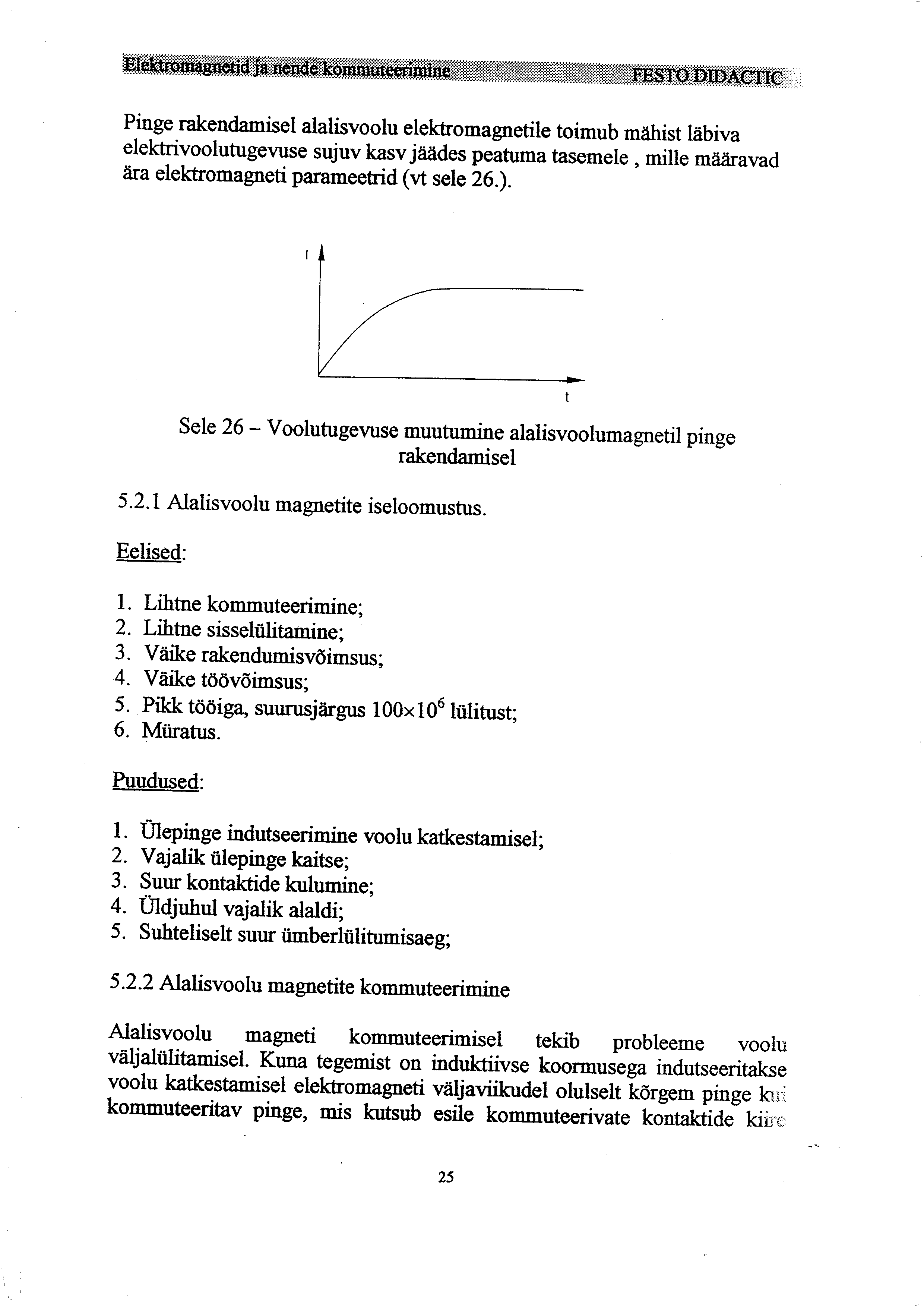
Pinge rakendamisel alalisvoolu elelctromaņetile toimub
mähist läbiva
elektrivoolutugevuse sujuv kasv jääd.' p"āto*a tasernele
, mille mäĮįravad
įįra elekf,romagneti parameefid (vt sete žo.;.
Sele 26 - Voolutugevįļse muutumine alalisvoolumagnetil pinge
rakendamisel
5 .2.I Alalisvoolu magnetite iseloomustus.
Eelised:
t. Lihtne kommuteerimine;
2. Lihtne sisselülitamine;
3. Väike rakendumisvõimsus;
4. Vtįike tÖÖvõimsų5;
6.
|ikk toöiga, suurusjĖirgus l00x106 lu.litust;
Mįįratus.
Puudused:
ļ ų"p.ge
2.
indutseerimine
Vajalik ülepinge
voolu katkestąmisel;
kaitse;
3. Suur kontaktide kulumine:
4. üdjūul vajalik al.aldi;
5. Suhteliselt suur timberlUlitumisaeg;
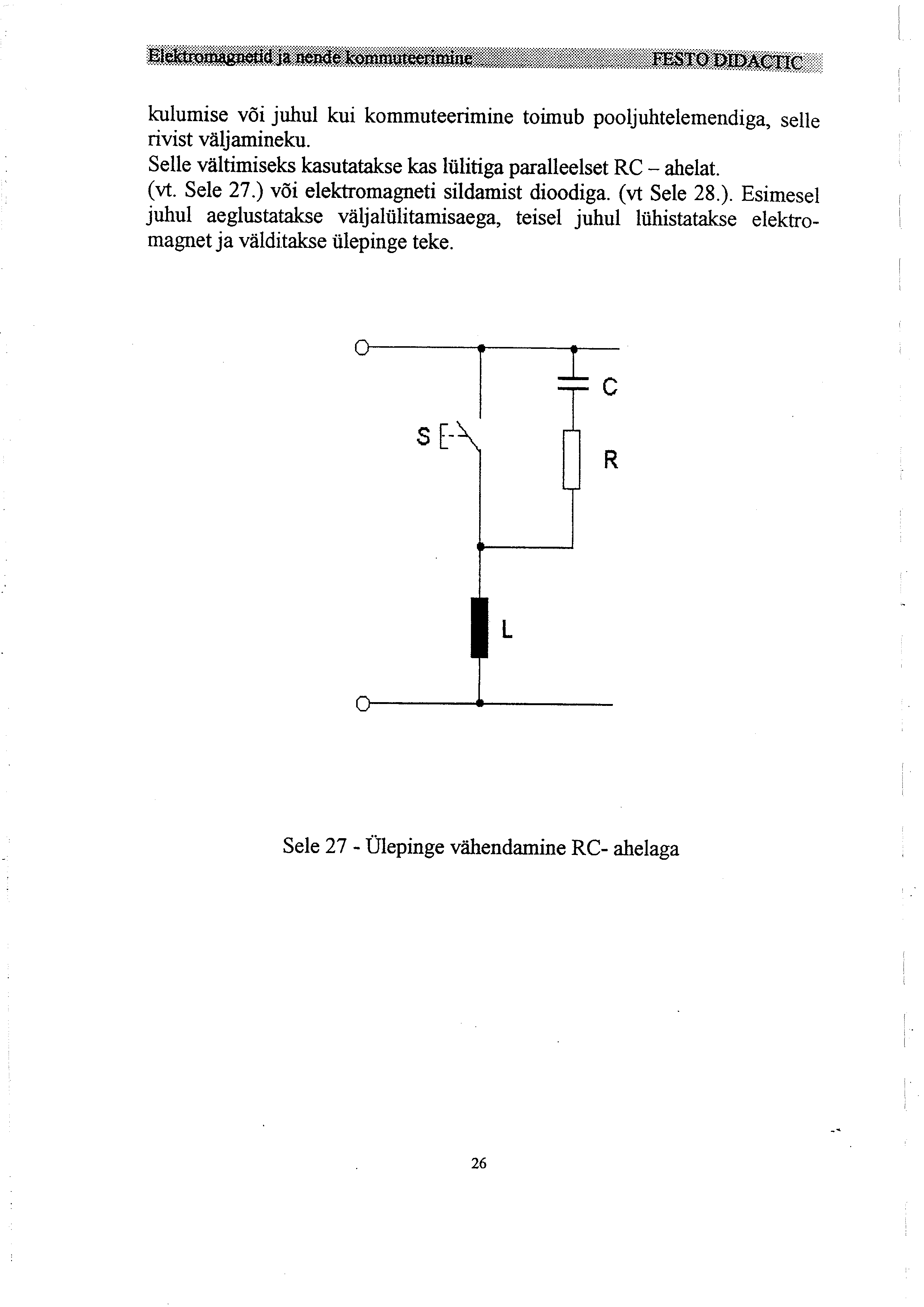
5 .2.2 AlaĮisvoolu magnetite kommuteeriminę
AlaĮisvoolu magneti kommuteerimiseĮ tekib probleeme voolu
vĒiljalütitamisel. K9na tegemist on indulf,iivse koormusega
indutseerįtakse
voolu katkestamisel elektromaņeti väŲaüikudet olulselt
Įo.g.- pinge lcii
kommuteeritav pinge, mis krrįsub kommuteerivate kontaktide kiire:
".ū"
kulumise või juhul kui kommuteerimine toimub pooĮuhtelemendiga, selle
rįvist väljamineku.
Seįle vältimiseks kasutatakse kas lütitiga paralleelset RC _ atrelat.
(vt. Sele 27.)või elektromaņeti sildamist dioodiga. (vt Sele 28.). Esimesel
juhuĮ aeglustatakse valjalulitamisaega, teisel juhul lühistatakse elektro_
maņet ja välditakse ülepinge teke.
Sele 27 _ Ulepinge vähendamine RC_ ahelaga
26
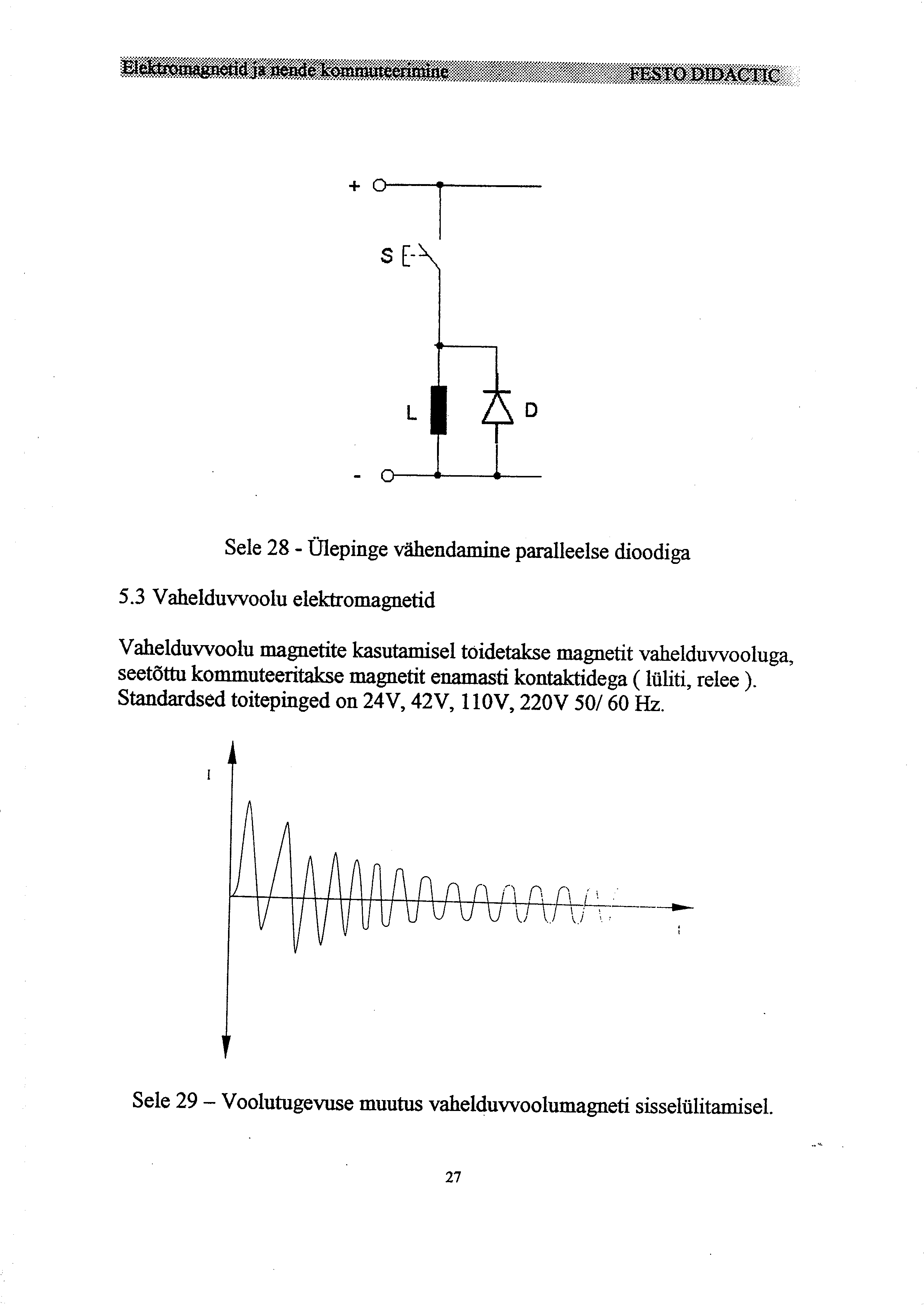
Sele 28 _ üepinge vähendamine paralleelse dioodiņ
5.3 Vahelduwooįu elektromagnetid
Vahelduwoolu magnetite kasutamisel toidetakse magnetit vahelduwooluga,
seetõttu kommuteeritakse maņetit enamasti kontaktidega ( lliliti, relee
).
Standardsed toitepinged on 24v, 42v l 10v, 220v 50/ 60 Iļz.
'
Sele 29 _ Voolutuge\Ąļse muutus vaheldrrwoolumagneti sisselülitąm i seį.
5.3. t Vahelduwoolumagnetite iseloomustus
Vahelduwooluma snetite eelised :
1. Lühike rakendumisaeg;
2. Suur tõmbejõud;
3. üaiurru puudub vajadus sädelemise summutamiseks:
4. Puudub vajadus aĮaldi jžirele.
Vaheįduwooluma gnetite puudused :
1. Tugev mehaaniline look;
2. Kuumenemine lülirunud olekus; Suurem võimsustįįrve;
3. Lühem ekspluatatsiooniaeg;
4. Lülifumiste piiratud arv, mis sõltub ankru liikumisulatusest;
5. Vibratsioonist tekitatud müra;
6. Tundlįk ülepingele, alapingele.
28
6 Lulititd ja releed.
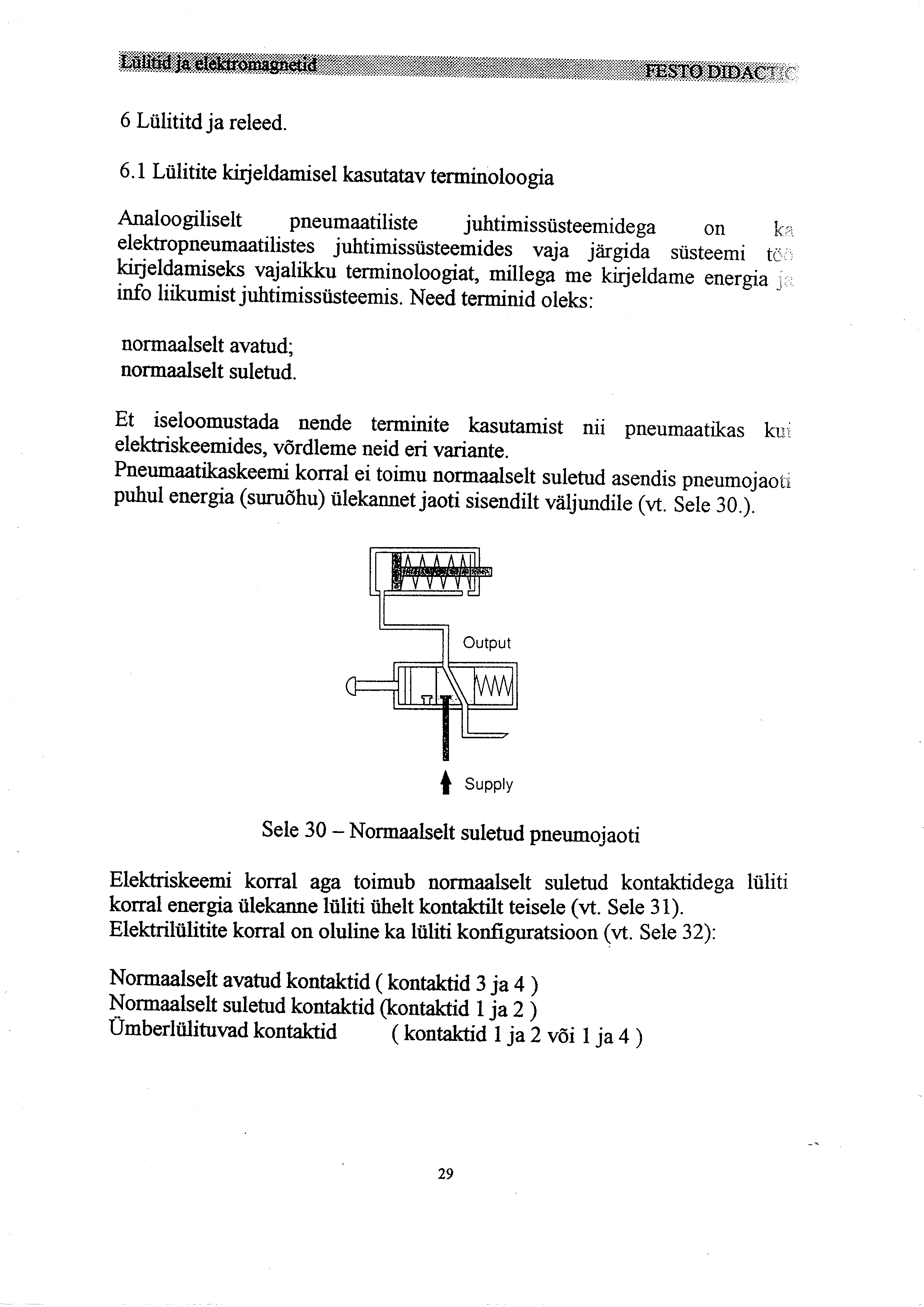
6. l Lülitite kif etdamisel kasutatav terminoloogia
Analoogiliselt pneumaatiliste juhtimissüsteemidega on k,.
elektropneumaatilistes juhtimissįisteemides vaja järgid; süsteemi
tÖl:<.j
i,i.lR:
ffi
ffi
it+ti
ifĮIi
iįĮll
iif$
i|i:i|i:iļ^
iįrįiri:
:il,t:lr.'
iji:i:::lļi
:::iįi::::l:
:::*:::,:
ü:;::l:I
::::::i::.lr
itli'j:j:'i
ü:i.:L+
i:tiliįĪiffi
i.ļļi.įļiš
iiiļiļtN
.ii]i:Ņ
illilĮ
::i::į::iį;<įi
iļĮĮ:::;į
::1:i::.:ļi
ļĮļ:iiit
:::i:ii.Ņ
Į$:įtI
*tti
iii.ffii
ļliĖįi
:įĮr
55
l:ifi!!
ļ::iĖ}:
ffi
t
itr
įiį}i
iļ #
:įā
įļĖį:
TJ#i
l:įt'į:
l:ilE:
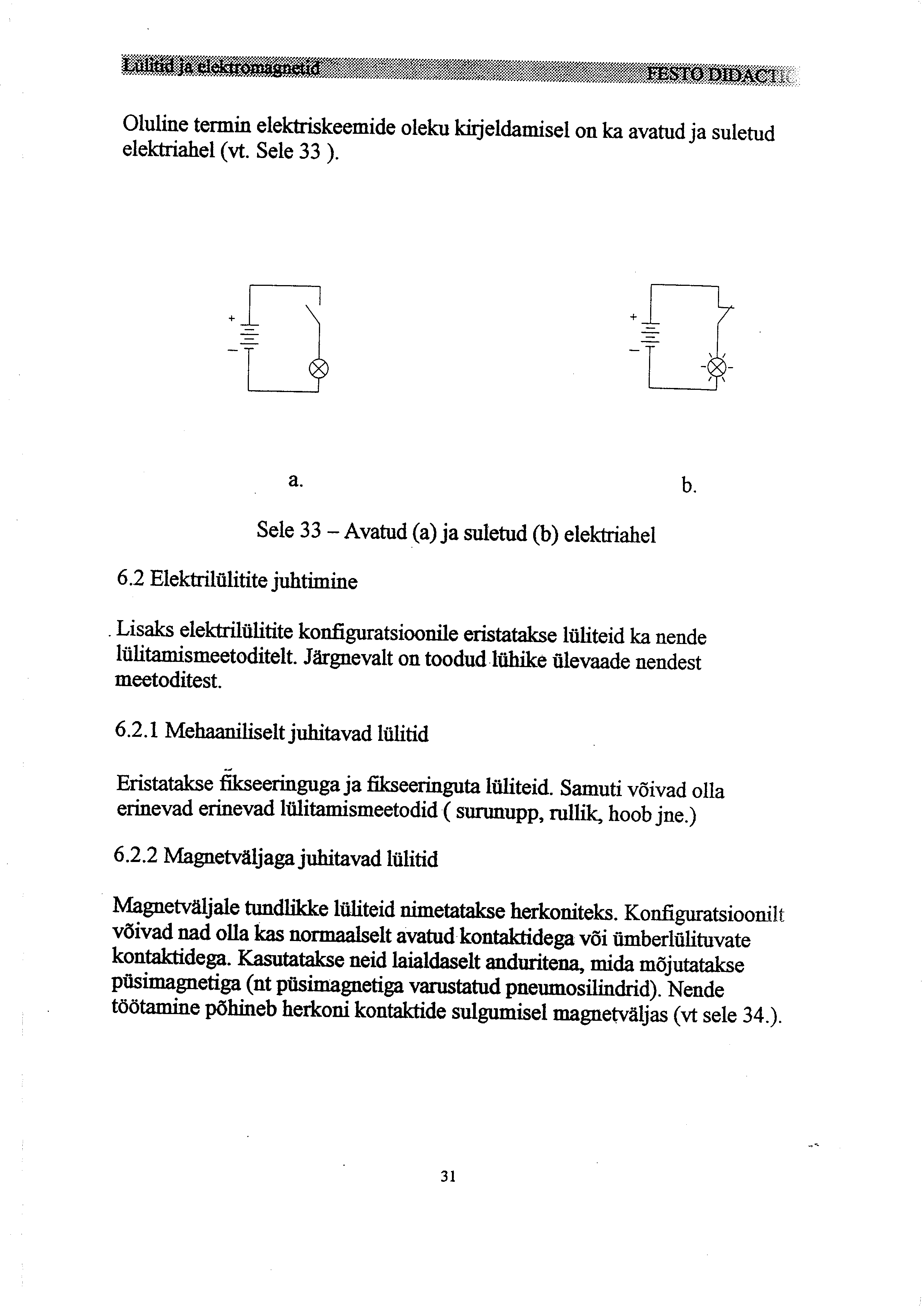
oluline termin elektriskeemide oleku kĘeldamiseį on ka avatud ja suĮefud
elektriahel (vr. Sele 33 ).
f
i--r
-L\ I
Tļ
ļ
t
L__9
a. b.
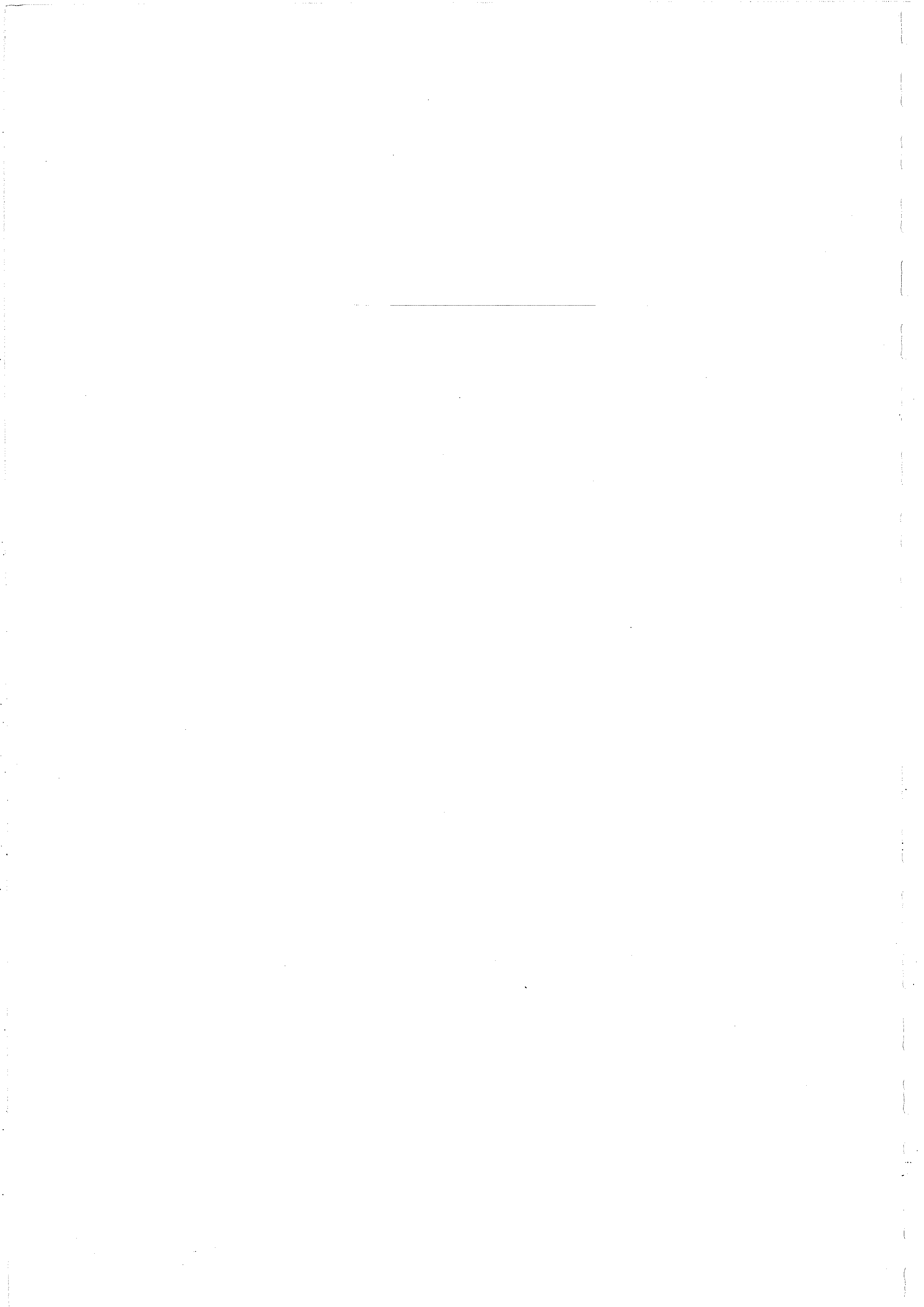
Sele 33 - Avarud (a) ja sulerud (b) elektriahel
6.2 Elektriįülitite juhtimine
. Lisaks elektrįĮulitite konfiņratsioonile eristatakse įüįiteid ka nende
lüütamismeetoditelt. Jžlrgnevalt on toodud lįįhike ūlevaade nendest
meetoditest.
6.2.I Meharnilisett juhitavad tütitid
Erįstatakse frkseeringuga ja filseeringuta lįiliteid. Samuti võivad oĮla
erinevad erinevad lįįlitamismeetodid ( surunupp, rulliĻ hoob jne.)
6 .2.2 Magnetväljaga juhitavad lülitid
}vIagnetväljale tundįikke luįiteid nimetatat
võivad nad olla kas normaalselt avatud kontaļcideņ või ūmber1ūlituvate
kontaktideņ. Kasutatakse neid laiatdaselt anduntJną mida mõjutatakse
pusimagnetigu ("! pusimaņetiga vanrstatud poe,r.oiiĮindrid). Nende
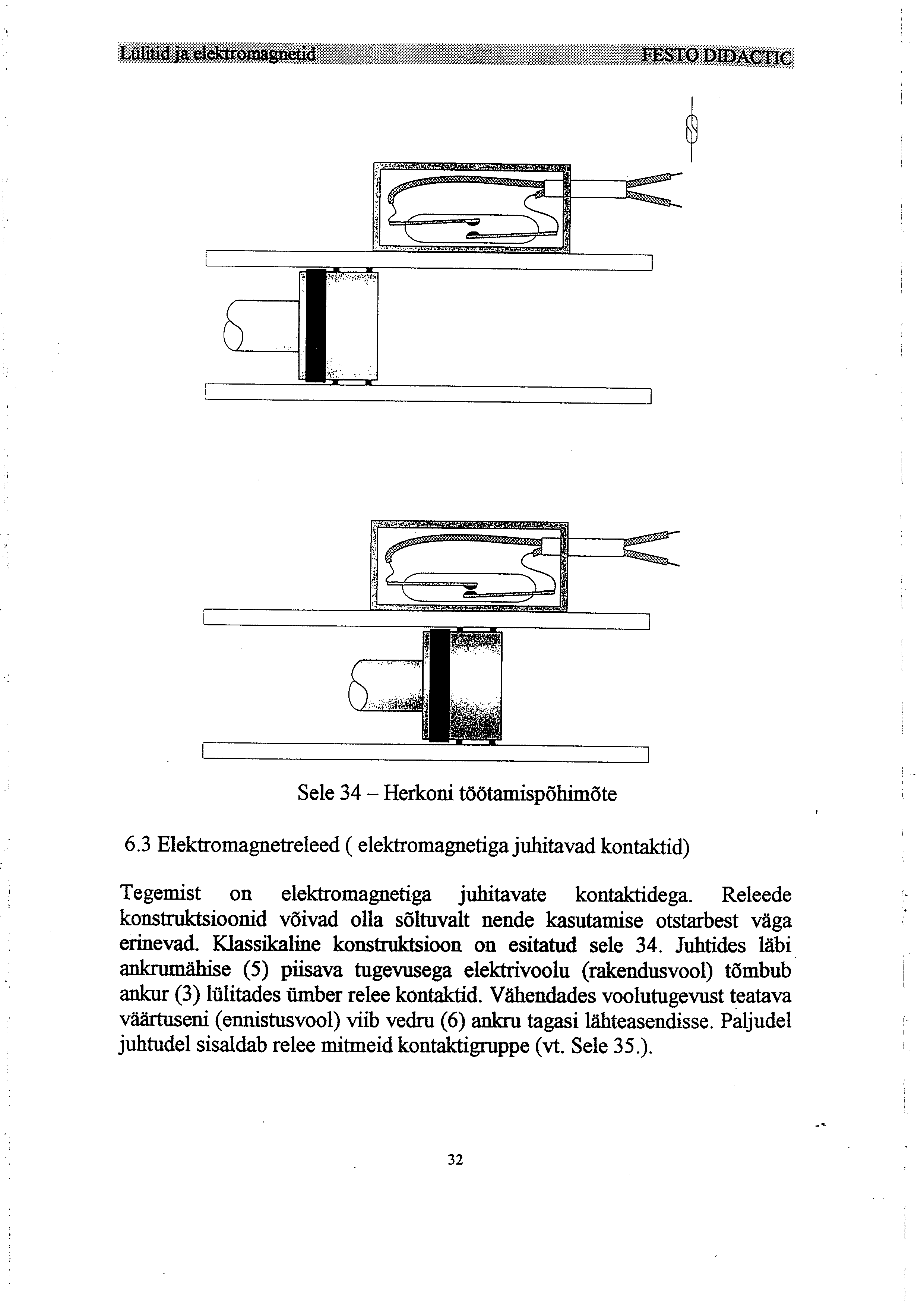
töötamine põhineb herkoni kontaktide sulņmisel magnetvätjas (vt sele 34.).
3t
Sele 34 _ Herkoni tÖÖtamispõhimõte
6. 3 Elekūomagnetreįeed ( elektromaņetiga j uhitavad kontaktid)
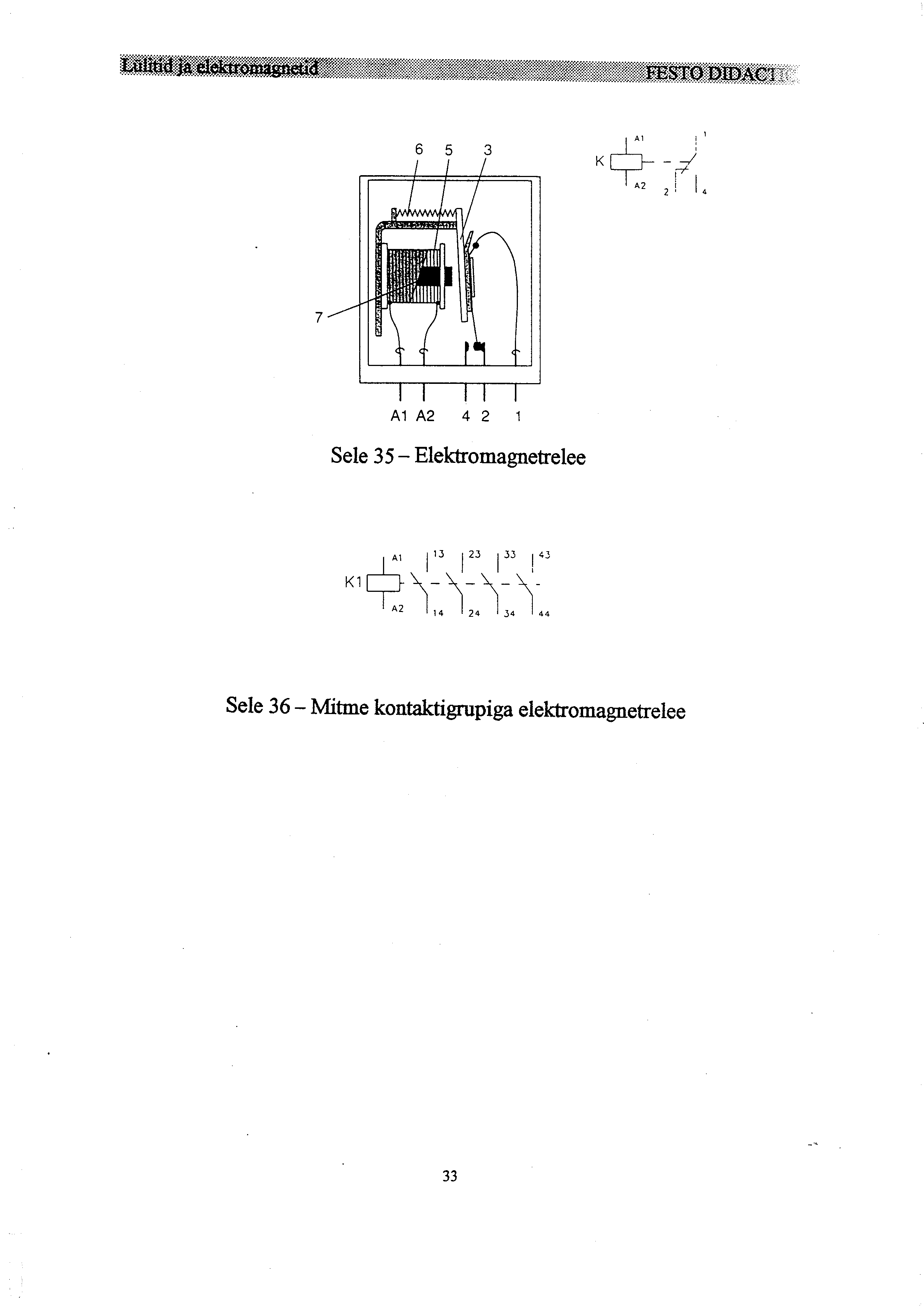
Tegemist on elektromaņetiga juhitavate kontaktidega. Releede
konstruktsioonid võivad olla sõltuvalt nende kasutamise otstarbest väga
erinevad. Klassikaline konstrrrktsioon on esitatud sele 34. Jūtides läbi
ankrumähise (5) piisava tugevusega eĮektrivoolu (rakendusvool) tõmbub
ankur (3) lūlitades ūmber relee kontaktid. Vžįhendades voolutugewst teatava
vžiįįrhrseni (ennisfusvooĮ) üib vedru (6) ankru tagasi lįihteasendisse. PaljudeĮ
jūtudel sisatdab reįee mitmeid kontaktignrppe (vt. Sele 35.).
32
A1A2 42 1
Sele 35 - Elek&omaņeūelee
lo' l't l" l" l"
Klņ\-\-\_\
-Ę, l,. ),. ),. )".
SeIe 36 - Mitme kontaktigrupiga elektromaņetrelee
JJ
7 Eįekūoonsed andurid
7. l Ülevaade elektoonsetest anduritest.
Automaatikaskeemides on ĮaiemaĮt kasutuseį optilised-, induktiiv-, magnet_,
mahtuvus- ja rõhuandurid. Kuna suuremat osa siņaalidest automaatika-
seadmes saab esitada binaarsel kujul ( andur väĮjastab signaati "1", andur ei
väljasta siņaali ..0" ) siis jlirņevalt vaatleme ltihidalt just seda hiüpi
andurite kasutamist.
7 .I.I Optilised andurid
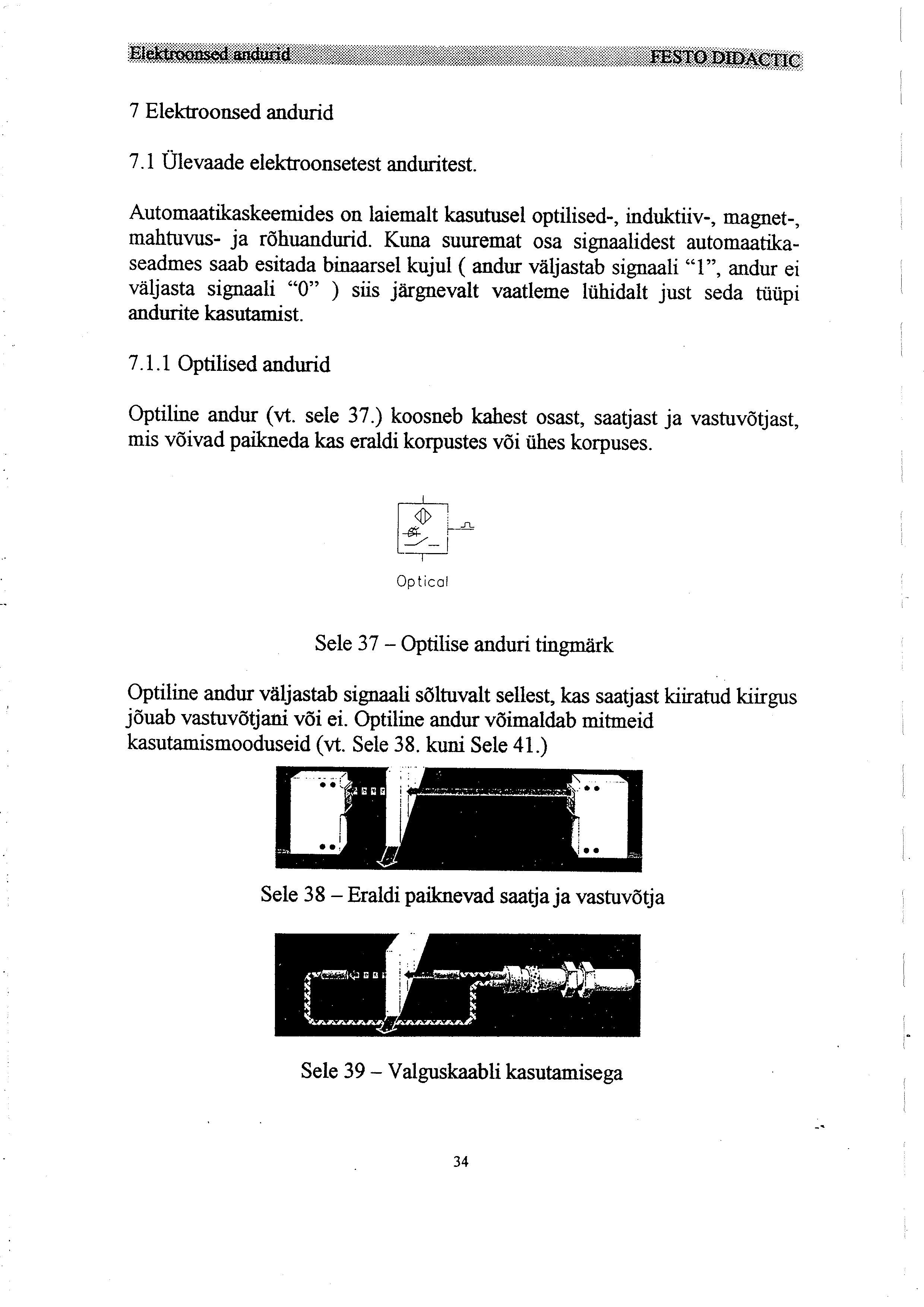
optiline andur (vt. sele 37.) koosneb kahest osast, saatjast ja vastuvõtjast,
mis võivad paikneda kas eratdi koņustes või ühes koņuses.
Sele 37 _ optilise andurį tingmärk
optitine andur väŲastab signaaĮi sõltuvalt sellest, kas saatjast kiįratud kiirņs
jõuab vastuvõŲani või ei. optiĮine andur võimaldab mitmeid
kasutamismooduseid (vt. Setę 38. kuni SeĮe 41.)
Sele 38 _ Eraldi paiknevad saaģa ja vastuvõtja
Sele 39 _ ValņskaabĮi kasutamisega
34
iĖĮ ruffiu+iļĪĮiifiiļļĮiĮįiĮ:iiiifiiiiĮfiiiiii:iiiiifliįĮiiiiii:j iļįļļiiffiiliiiliiiiuĮiii::iii.iiiiiiĮlr.e8-. giiüĮD*ē. r
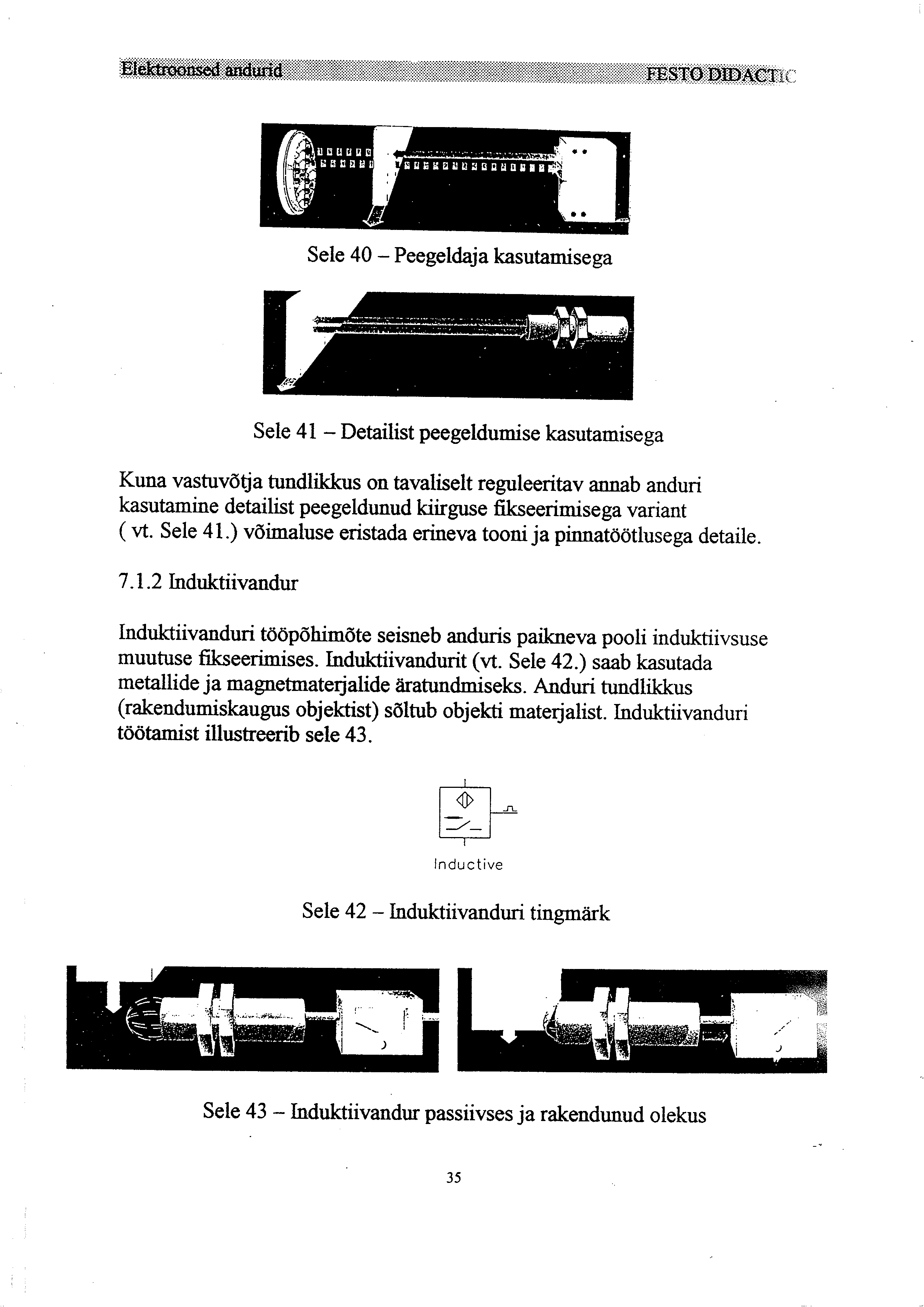
Sele 40 _ PeegeĮdaja kasutamisega
Sęle 41 - Detailist peegeldumise kasutamisega
Kuna vastuvõŲa tundlikkus on tavaliselt reņleeritav annab andurį
kasutamine detailist pee geldunud kiirguse filrseęrįmisega variant
( vt. Sele 4l.) võimaluse eristada erineva tooni ja pinnatöötlusega detaile.
7 .1.2 hduktiivandur
Induktiivanduri toöpõhimõte seisneb anduris paikneva pooli induktiivsuse
muutuse fikseerįmises. Induktiivandurit (w. Sele 42.) saab kasutada
metallide j a magnetmaterjalidę įįratundm i seks. Anduri fundlikkus
(rakendumiskauņs objektist) sõltub objekti materjalist. Induktiivanduri
töötamist illustreerįb sele 43.
lnductive
Sele 42 _ Induktiivanduri tingmžirk
Sele 43 - Induktiivandur passiivses ja rakendunud oįekus
35
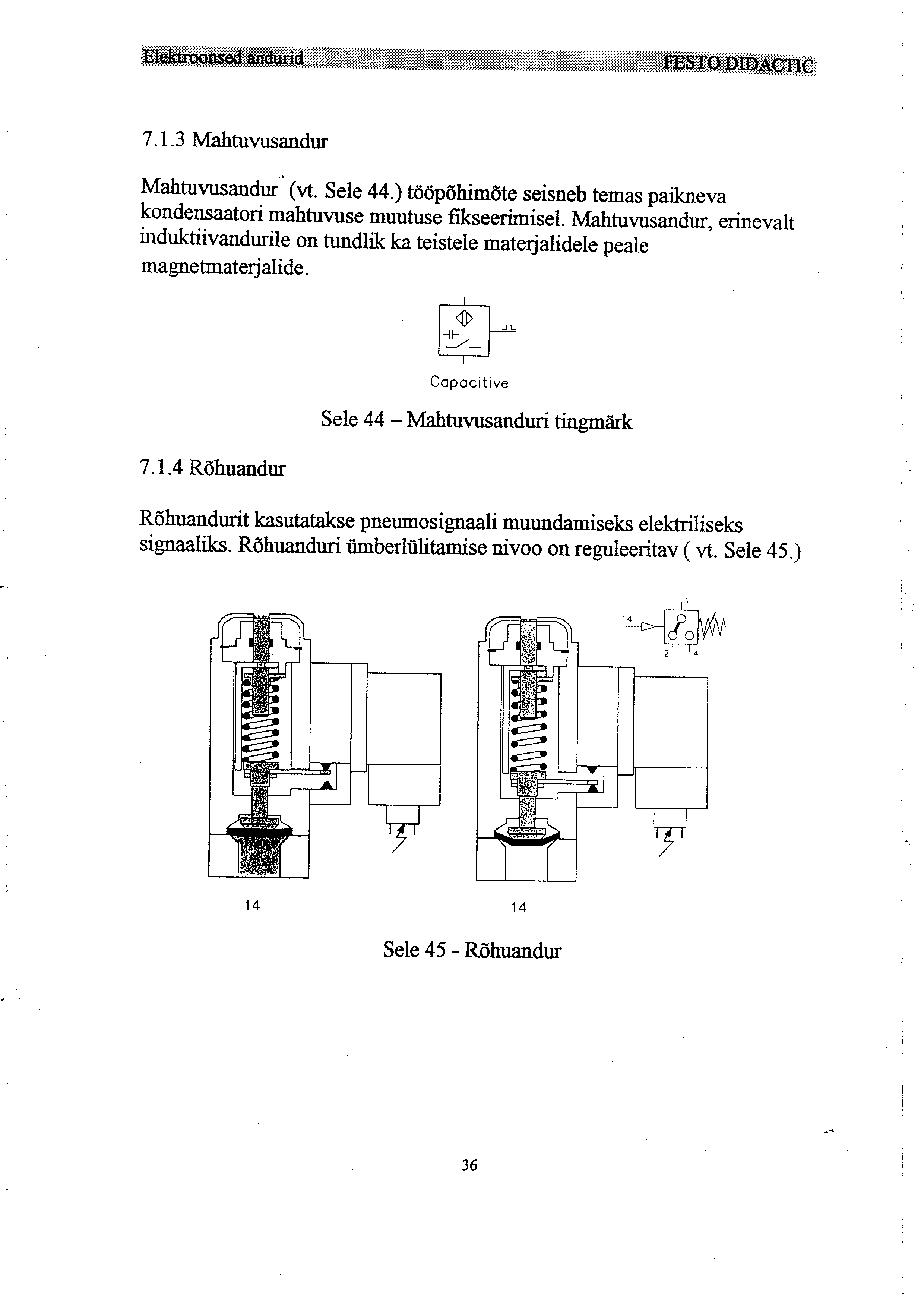
'Ī .t.3 Mahtuvusandur
Mahtuvusandur'(vt. Sele 44.) tÖöpõhimõte seisneb temas paikneva
kondensaatori mahtuwse muutusā fikseerimisel. Mahtuvuļandur,
erinevaĮt
induktįivandurile on tundlik ka teistele matefalidele peale
magnehaterjaĮide.
Copocitive
Sele 44 - Mahtuvusanduri tingmeirk
'7.l.4 Rõhuandrrr
Rõhuandrrrit kasutatakse pneumosiņaaĮi muundamiseks elektriliseks
signaaliks. Rõhuanduri rrmbertülitamise nivoo on reņleeritav ( vt. Sele 45.)
36
.ĖiĖ iffiffiiiiiffii*iĮiļii:iiiili::i:::;itiiiiilii::iiitiiiilii;+Ī,ltļ:ii:t+ttiiiili,iļriiiiĮiliĪ*rriiiļffiiiii:iįĮiĮ::iiiiiiir,.e8'. ojiņmķeate.
7.2 Elektroonsete andurite skeemi įįhendamine
EĮektroonsete andurite valikul ja skeemi ühendamisel tuleb jalgida 1isaks
anduri tÖÖprintsiibile ka anduri eĮektrilisi parameetreid ja anauii väljundi
skeemį. Nende parameetrite mittearvestamine võib kaasa tuua ebaõise
anduri valiku või tema kohese riüst väĻamineku.
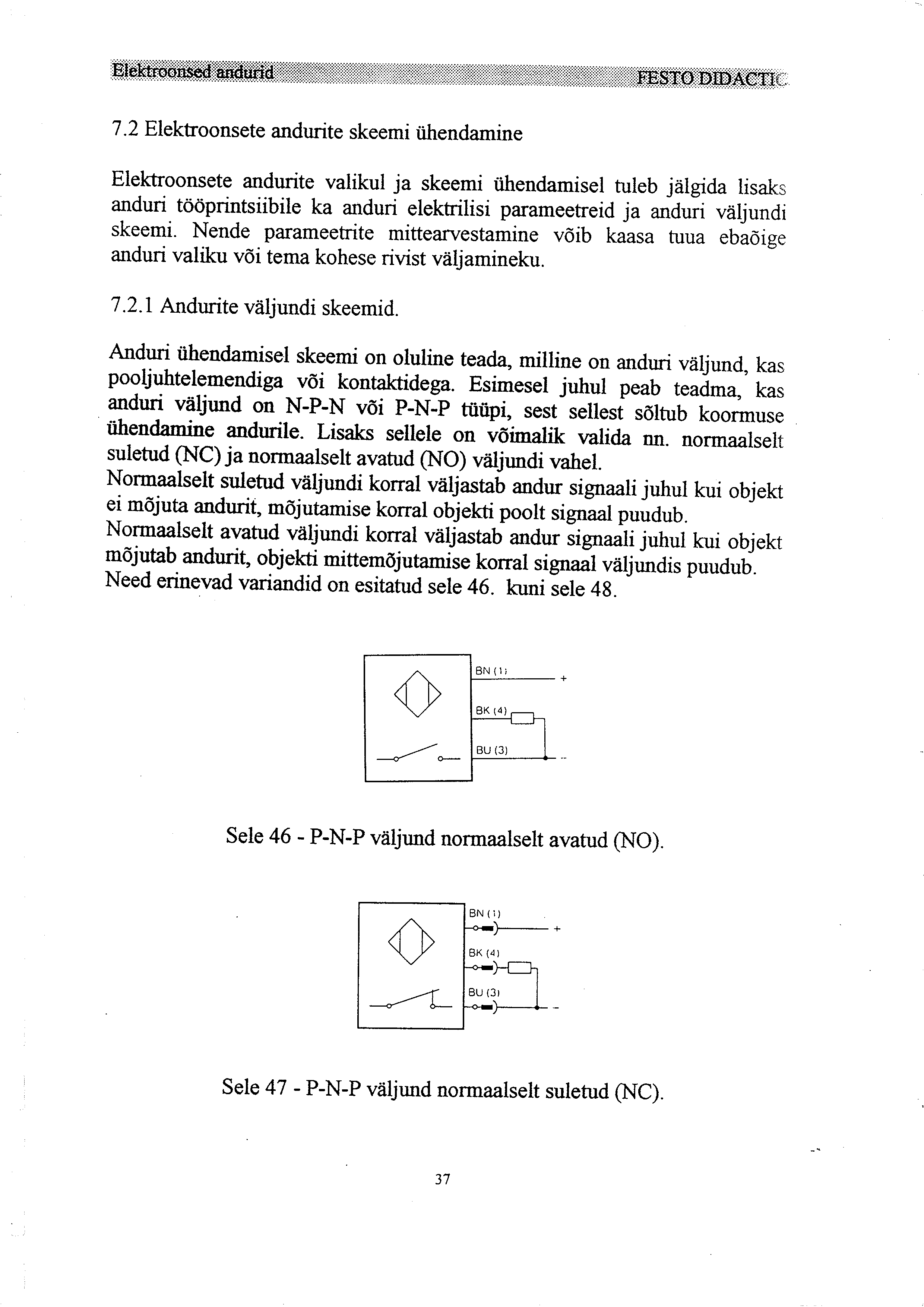
7 .2.I Andurite väĮundi skeemid.
Anduri ühendamisel skeemi on oluline teada, milline on andurį
väljund, kas
pooĮjuhtelemendiga või kontaktidega. Esimesel juhul
peab teįdma, kas
anduri väŲund on N_P-N voi P-N-P ttiüpi, sest sellest sõlfub
koormuse
įüendąmine andurile- Lisaks sellele on lroir"tik valida nn.
norįnaalselt
suĮefud Ņc) ja nonnaalselt avatud (No) vriĮundi vahel.
Normaalselt suletud väĻundi korral väŲastaū andur siņaali juhul
kui objekt
ei mõjuta andurit, mõjutamise korral ou3"tti poolt signĻt prĮaru.
Normaalselt avatud väljundi korral valjĻtab andur siņaali juhul
kui objekt
ņõjutab andurit, opj eĘti_ mittemõjutamise korral siņaat valj undis puudub.
Need erinevad varįandid on esitatud sele 46. kuni sele 48.
----,-'-t *
Sele 46 - P_N_P väljrrnd normaalselt avatud Ņo)
-_----t_
Sele 47 _ P_N_P väljrrnd normaalselt sulefud ŅC).
---"t"t'*
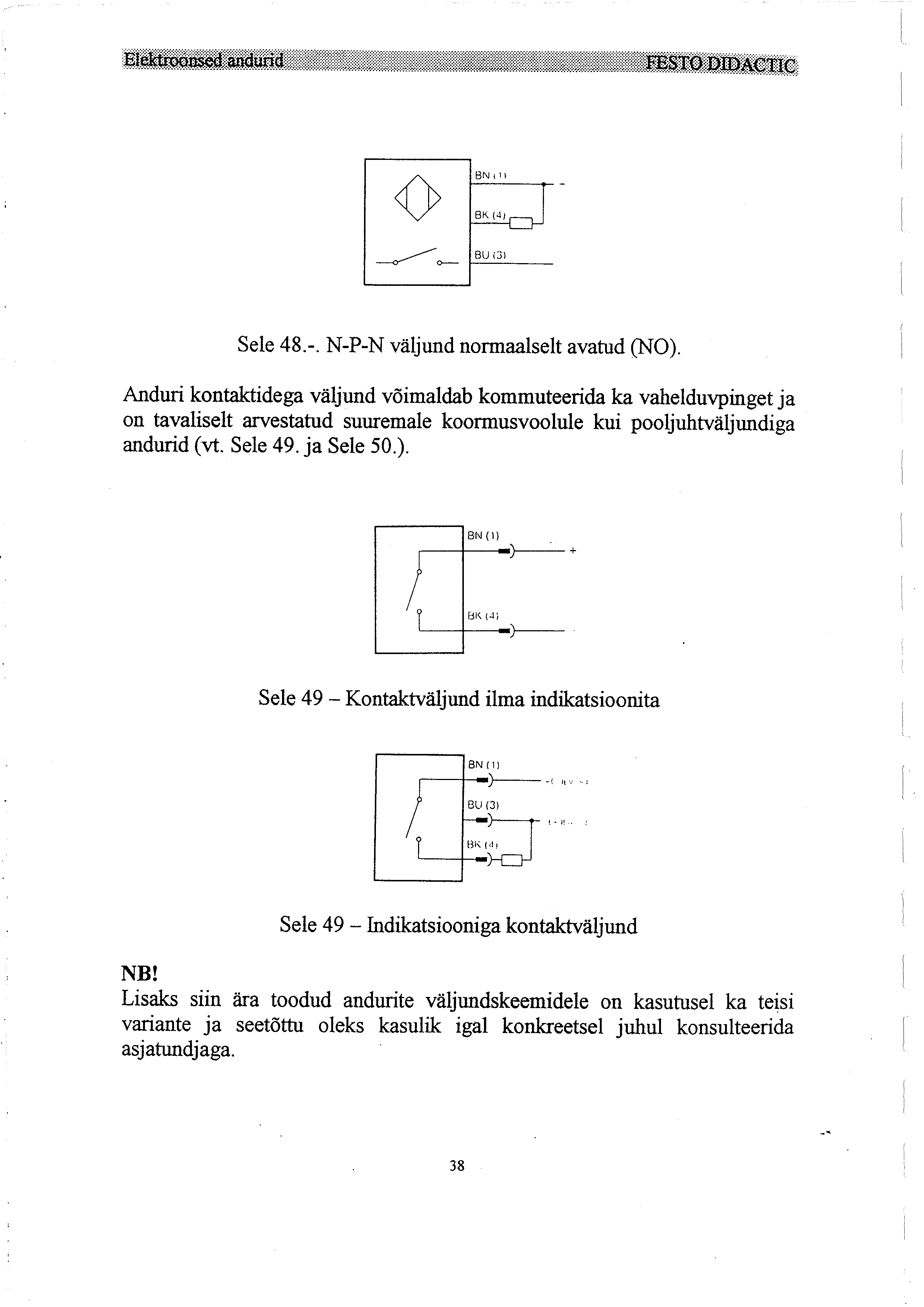
Sele 48._. N_P-N väljund norĪnaalselt avatud CNo)
Anduri kontaktidega väljund võimaldab kommuteerida ka vahelduvpinget ja
on tavaliselt arvestafud suuremale koormusvooĮule kui pooĻuhtväljundiga
andurid (vt. Sele 49. ja SeĮe 50.).
Sele 49 - Kontaktväljund ilma indikatsioonita
SeĮe 49 _ Indikatsiooniga kontakwaĻund
NB!
Lisaks siin žļra toodud andurite väljundskeemidele on kasutusel ka teisi
variante ja seetõttu oleks kasulik igal konļaeetsel juhut konsulteerida
asjatundjaga.
38
:ElĖ Įi iii:;ii+ri+, il,.. iiiiĮi:iiii:iiiriliļiilli'*iil+riiiilriliiiiffirffiiliiii:iiiiiiii:i ,g-ffi;äffii:
7 .2 .2 Anduri elektriliste paĪameetrite arvestamine
Andurįte skeemi ühendamisel tuĮeb jälgida ka seda, et ei toimuks andurį
väĻundi ülekoormamist st. anduri väljundvool peab olema väiksem lubatud
maksimaalsest koormusvoolust. Ettevaatlik tuleb olla ka įnduktiivsete
koormuste kasutamisel (vt. Elektromagnetite kommuteerįmine).
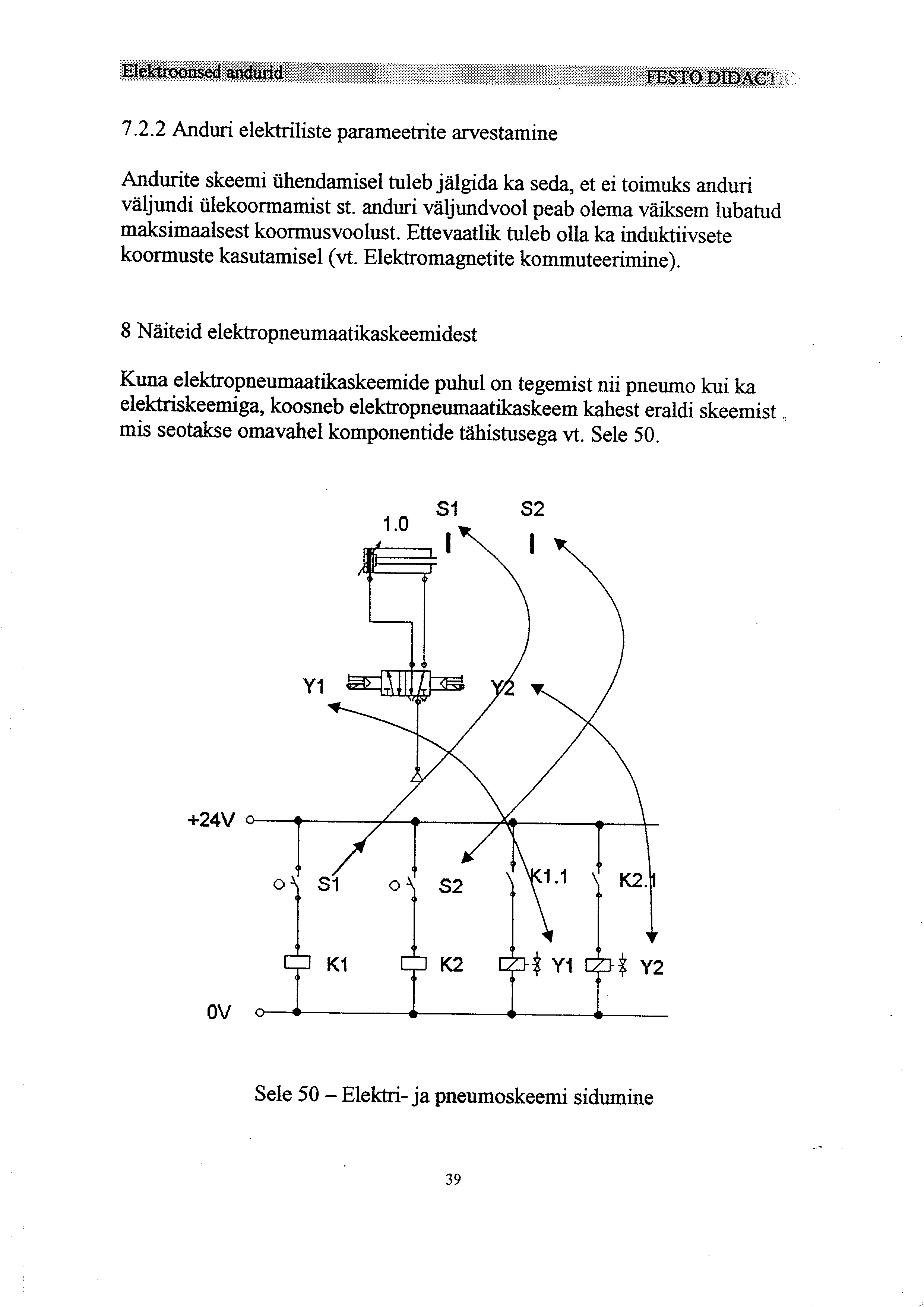
8 Näiteid elektropneumaatikaskeemidest
Ķ*" elektropneumaatikaskeemide puhuĮ on tegemist nii pneĮļmo kui ka
elektriskeemiga, koosneb elekfopneumaatikaskeem kahešt eraldi skeemist .
mis seotakse orravahel komponentide tiihistusega ū. Sele 50.
+24V
SeĮe 50 - Elektri- ja pneumoskeemi sidumine
39
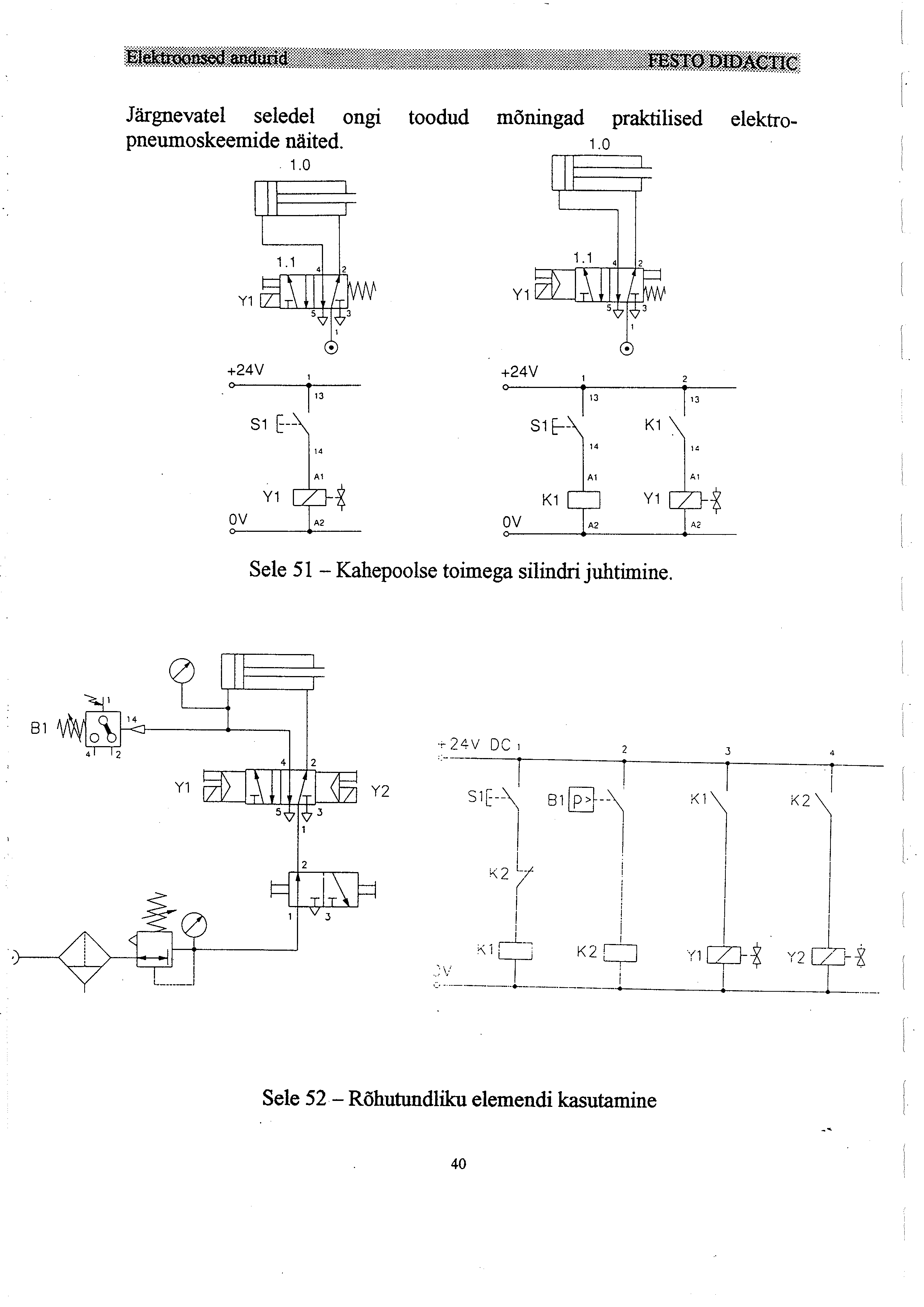
Jžirņevatel seledeį onņ toodud mõningad praktiĮised eĮektro-
pneumoskeemide näited. 1.o
S1Ļ]
K1
Sele 51 - KahepooĮse toimega silindri jūtimine.
'.21V DCt z J
_ 4
Slt-\
i-ill 81ļīļ\ K1\' K2\
ļtlļ
^''a
K?-l
ļiļ,
ļi] ļ
i ļ
i l ļ
ļ<
l
ī_7-f ģ
_Ī- r)-rx
rv'
u, ',2
i
-T- -
-ļ-_.--.
I
I
Sele 52 _ Rõhutundliku elemendi kasutamine
ifiJ įltlirllliriiil+Įiif#-irįffiiffiiriįiflįilffi,*f,-ffi ffiffiii
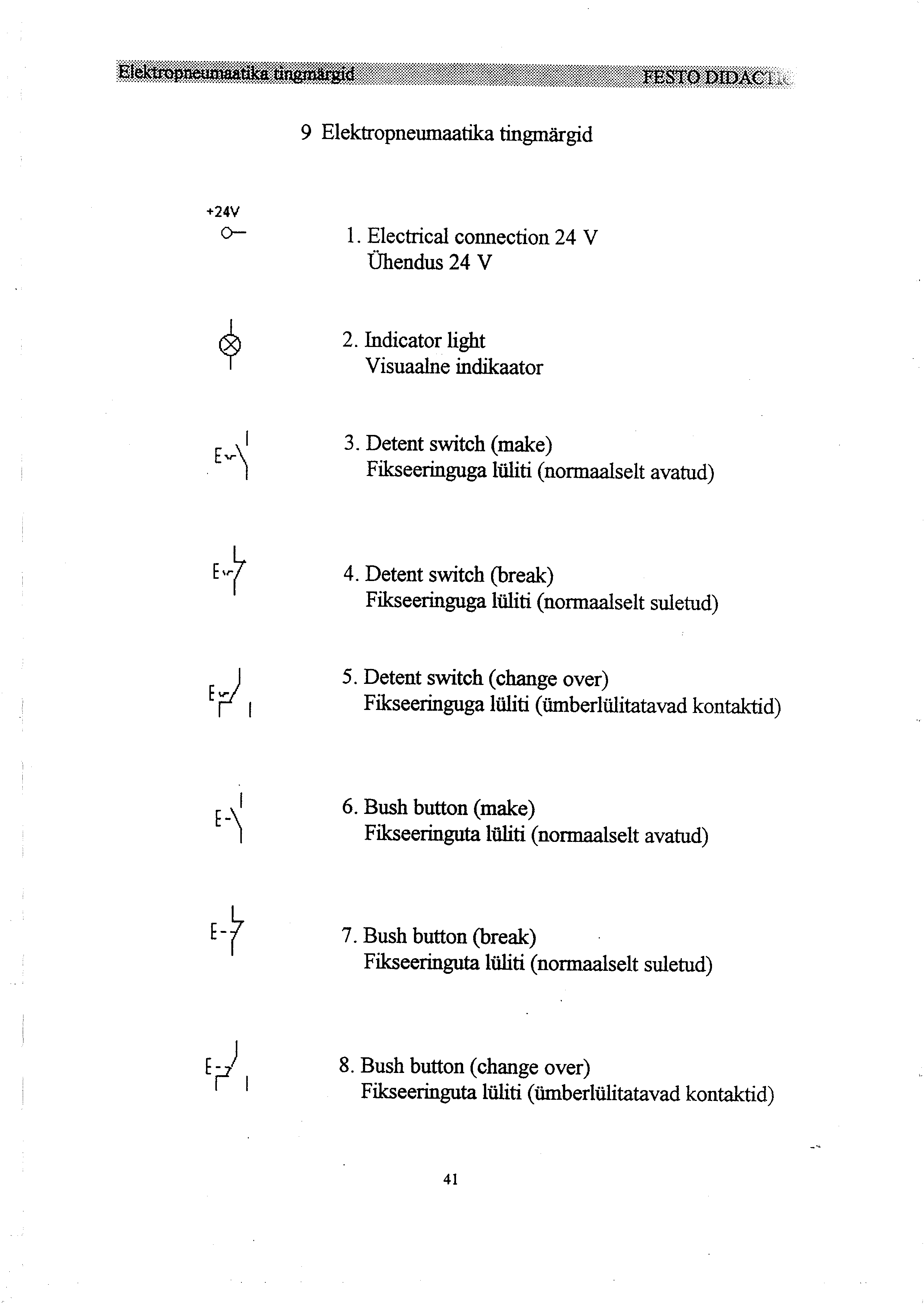
9 Eleknopneumaatika tingmįirgid
+24V
ģ- l. Electrical connection 24 V
ĮJhendus 24 v
&
I
liģt
I
2. Indicator
Ī Visuaalne indikaator
F*\l
- I
3. Detent switch (make)
Fikseeringuga lti{iti (normaalselt avatud)
Ė*ī
I
4. Detent switch @reak)
' Fikseerinņga iutiti (*..aalseĮt suletud)
, ) 5. Detent switch (change over)
'fl 1 Fikseerinņga lįiliti (iimberli,iūitatavad kontaktid)
Bņh
' -\l
r
6. button (make)
] Fikseerinņta lūįiti (normaalselt avatud)
E-7
I
7. Bush butron (break)
' Fikseerinņta Įįįlitį (nonrraalselt suĮetud)
I
8. Bush button (change over)
'į ' Fikseerinņta lütiti (ümberĮuĮitatavad kontaktid)
4t
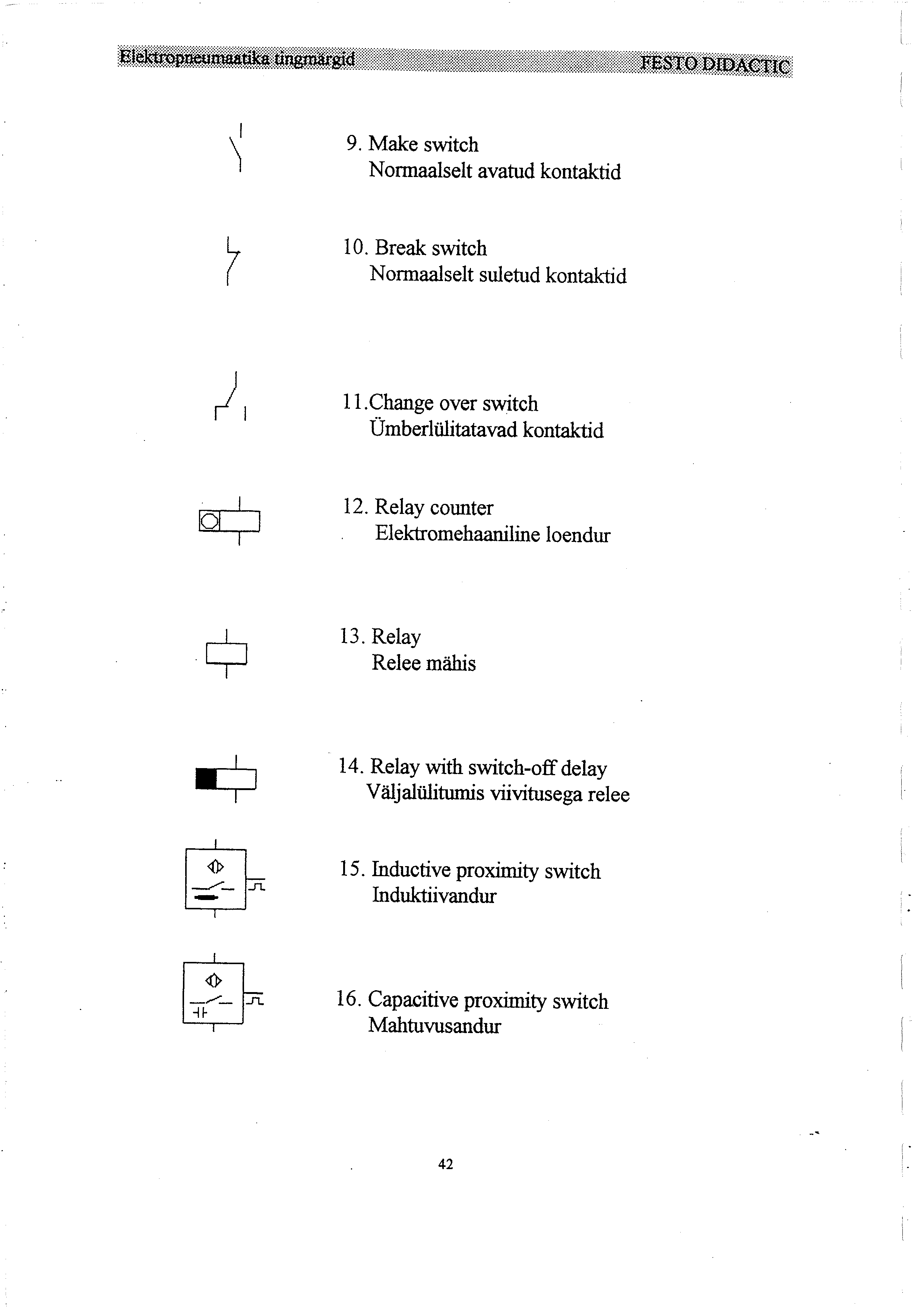
9. Make switch
Normaalselt avatud kontaktid
10. Break switch
7 Normaaļselt sūętud kontaktid
rr
I
l l.Change over switch
Ümb erl urlitatavad kontakti d
l2. Relay countęr
Elekhomehaaniline I oendur
13. Relay
Relee mähis
14. Relay with switch-offdelay
väljalįįlitumis viiüfusega relee
15. Įnductive proximity swįtch
Induktiivandur
16. Capacitive proximity swįtch
Mahtuvusandur
42
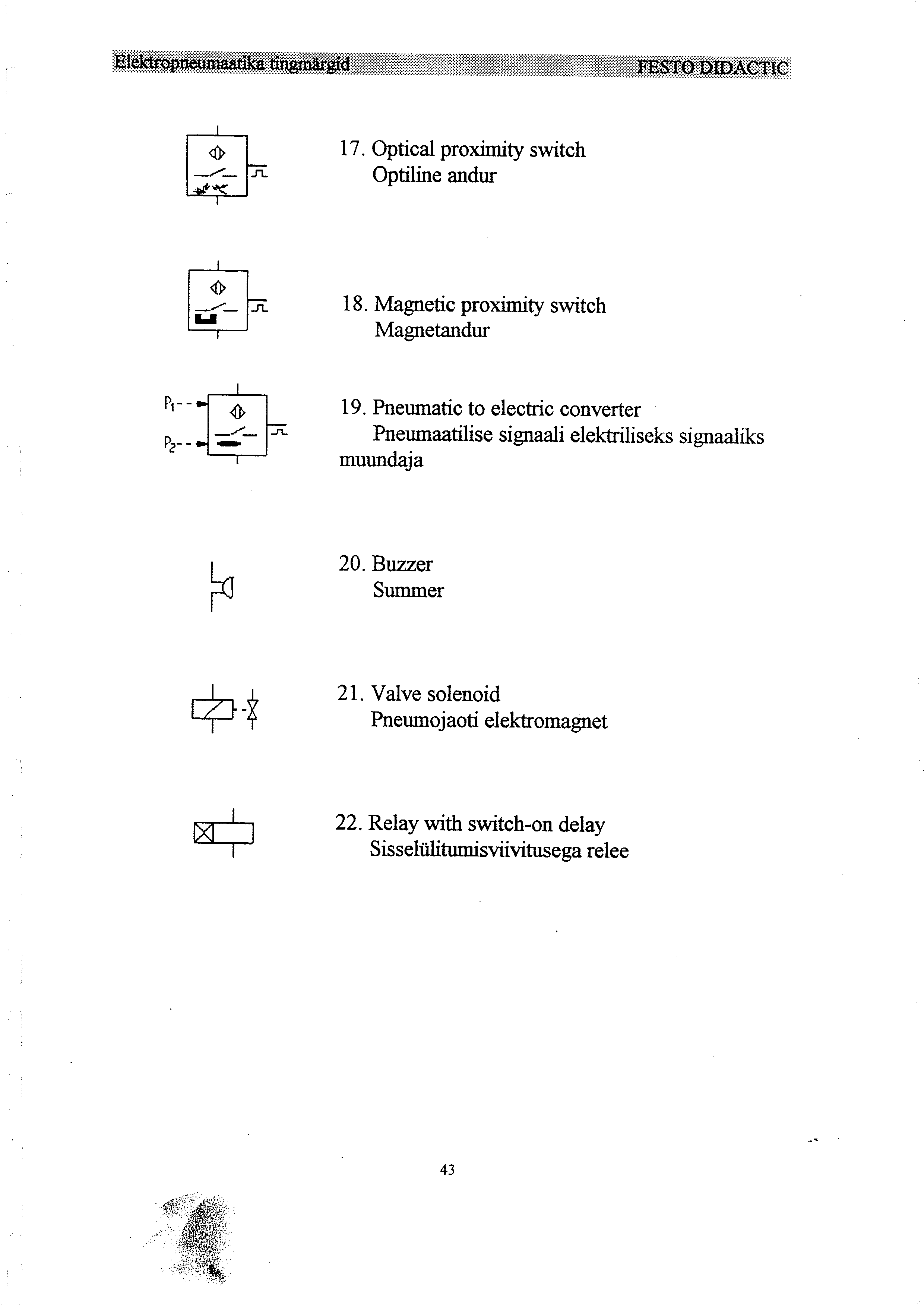
17. Optical proximity switch
Optiline andur
18. Maņetic proximity switch
Magnetandur
19. Pneumatic toelecfic converter
Pneumaatilise signaali elekriliseks siņaatiks
muundaja
)Q.Ętlzr'ę1
Summer
*+
21. VaĮve solenoid
Pneumoj aoti elekf omaņet
2Z.F.elay with switch-on delay
S įss elįirlifumisvįiütuse ga relee
43
l0 Kasutatud kirjandus
1. P.Croser, j. Thomson Elekropnertmatics, basic level Festo Didactic 1991.
44
Antud õpiku kasutamine eeldab eeįnevalt kursuse "Pneumaatika põhialused"
läbimist ja vastava õpiku olemasolu, kuna antud õpikus käsitletakse põhiliselt elektropneumaatikaseadmetes kasutatavate elektriliste komponentide ehitust.
Materjal on ülevaatlik ja väga põhjalik. 44 LK
FESTO DIDACTIC
Tallinn 1997
Sarnased õppematerjalid
![Pneumaatika alused]()
97
pdf
Pneumaatika alused
PNEUMAATIKA ALUSED
Koostas: Rein Uulma
Sisukord
1 Pneumaatika ajalugu ja kasutatavad ühikud............................................................................ 2
1.1 Suruõhu kasutamise ajalugu............................................................................................. 2
1.2 Suruõhu omadused ........................................................................................................... 2
1.3 Füüsikalised alused .......................................................................................................... 3
1.4 Õhu kokkusurutavus......................................................................................................... 6
1.5 Õhu ruumala sõltuvus temperatuurist .............................................................................. 7
2 Suruõhu saamine ................................................................................................................
![Pneumaatika alused]()
194
pdf
Pneumaatika alused
PNEUMAATIKA ALUSED
Koostas: Rein Uulma
Sisukord
1 Pneumaatika ajalugu ja kasutatavad ühikud............................................................................ 2
1.1 Suruõhu kasutamise ajalugu............................................................................................. 2
1.2 Suruõhu omadused ........................................................................................................... 2
1.3 Füüsikalised alused .......................................................................................................... 3
1.4 Õhu kokkusurutavus......................................................................................................... 6
1.5 Õhu ruumala sõltuvus temperatuurist .............................................................................. 7
2 Suruõhu saamine ................................................................................................................
![Sujuvkäivitid ja sagedusmuundurid]()
180
pdf
Sujuvkäivitid ja sagedusmuundurid
TaIlinna Tehnikaülikool
Elektriajam ite ja jõueIektroonika instituut
Eesti Moritz Hermann Jacobi Selts
SUJUVKÄIWTiD JA
sAGĘDĮJ$MUUNDUREņ
rÕruu LEHTtA
...
'r'..
.,-.:r'i,,ili. 'r ".1
i 'Ļ 1 )-
'':' : .,. 'l
..-:
.- :ī-
Īallinn
1 999
�Sujr.rvkäivitid ia sagedusmuundLrrid' Koostanud T. Lehtla. TTÜelektriajalrrite .ļa
iõrrelek1roonika instituut. Eesti Moritz Hermann Jacobi SeĮts. Taļlinrr,
l999. 90 lk'
Saa?
Elektrotehnika ja elektroonika
![Andurid]()
54
pdf
Andurid
3.ANDURID JA NENDE MÕÕTEPRINTSIIBID.
3.1.Andurite definitsioon ja liigitus. Anduritele esitatavad nõuded,
ideaalkarakteristikud.
Andur on automaatsüsteemi osa, mis muundab kontrollitava suuruse mõõtmiseks,
edastamiseks, säilitamiseks, registreerimiseks, võimendamiseks või juhitavasse
seadmesse suunamiseks sobivasse vormi (optiliseks, mehaaniliseks või elektriliseks
signaaliks). Andur koosneb tavaliselt tajurist (esmamuundurist) ja ühest või mitmest
vahemuundurist. Mõnel juhul moodustab anduri ainult tajur (nt. termopaar,
takistustermomeetri andur).
Joonisel 0.2.1 on toodud tüüpilise anduri plokkskeem.
Andurid liigitatakse füüsikalise tööpõhimõtte järgi:
1. elektrisuuruste muutusel põhinevad andurid : induktiivandurid, mahtuvusandurid,
takistusandurid;
2. optilised, kasutavad elektrimagnetilisi protsesse lainepikkustel üle 10¹² Hz.;
3. mehaanilised, kasutavad tahkete kehade liikumist;
4. hüdraulilised, kasutavad vedelike mehaanilisi omadusi;
5. pneum
![Elektriajami juhtimine]()
158
pdf
Elektriajami juhtimine
vahendi konspektiivne iseloom. Seega on õpilastel vajalik aktiivselt osaleda tundides
ja soovitavalt ka konspekteerida õppejõu täiendavaid selgitusi. Ja loomulikult ei
sisalda õppevahend sellist materjali või on see esitatud väga napilt, mida on võimalik
leida teistest kättesaadavatest allikatest, millistele on õppevahendi tekstis vihjatud ja
mis on ära toodud kirjanduse loetelus või mida on põhjalikult käsitletud teistes
õppeainetes nagu näiteks automaatika alused, digitaaltehnika, elektrimasinad, elektri-
ajamid jne.
Kuna käesolev õppevahend on autori teada esimene selleteemaline kutsekeskharidus-
koolidele koostatud üllitis, ei ole välistatud selles ka ebatäpsused ning vead ja autor
on juba ette tänulik kõikide märkuste ja täpsustuste eest.
Rein Kask
Jaanuar 2007.a.
� Sisukord
Sissejuhatus ................................................................................ 6
S1. Põhimõisteid ..........
![A Palu mootorratta raamat]()
181
doc
A.Palu mootorratta raamat
ARSENI PALU
EHITUS,
EKSPLUATATSIOON
SÕIDUTEHNIKA
«Valgus» · Tallinn 1976
�6L2
P10
Retsenseerinud Uve Soodla Kääne
kujundanud Bella G r o d i n s k i
Raamatu esimeses osas kirjeldatakse meil enamlevi-
nud mootorrataste, motorollerite ja mopeedide ehi- Eessõna
tust ning töötamist. Teises osas käsitletakse kõigi
nimetatud sõidukite hooldamist ja rikete otsimist- Mootorrattaid (motorollereid ja mopeede) käsutatakse
kõrvaldamist Kolmandas osas antakse nõu õige ja peamiselt isiklike sõidukitena. Nad säästavad aega igapäe-
ohutu sõidutehnika õppimiseks. vastel tarbekäikudel, võimaldavad huvitavalt veeta nädala-
Raamat on mõeldud kõigile, kes tunnevad huvi
![Automaatika alused]()
47
rtf
Automaatika alused
Sissejuhatus.
Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles
protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud.
Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene
neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või
parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi.
Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks
tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul
automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks
automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid.
Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika
süsteemiks.
Nad võimaldavad mehhanismide ja seadmete automaatset käivitust, reversee
![Automaatika konspekt]()
42
docx
Automaatika konspekt
Sissejuhatus.
Automaatika süsteeme kasutatakse
tootmisprotsessis, kus ta
kõrvaldab inimese osavõtu selles
protsessis ja võimaldab teostada selliseid protsesse mis on
inimesele kahjulikud.
Automaatika süsteemi kuuluvad automaat kontrollimine ja
automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e.
parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel
reguleerimisprogrammi järgi.
Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink
või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul
automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Komp
Meedia
Kommentaarid (0)





























































Kõik kommentaarid