Põltsamaa
Ametikool
Piduri
veojõu ja
juhitavuse korrektorid
A3
Alvar Müür
Kaarlimõisa
2010
Sisukord
1. ABS- Anti- lock breaking system ( Blokeerumatud
pidurid ) 3
3
1.2 ABS- i tööpiirkond 3
1.3 ABS-i tööpõhimõte 5
1.4
Andurid ja täiturid 5
1.4.1 Piduritulelüliti 5
1.4.2 Esi- ja tagarataste pöörlemissagedusandurid 6
1.4.5 Hüdrosõlm 8
2. EBV - Pidurdusjõu jaotur 9
3. EDS - Diferentsiaali lukustus 9
3. ASR - Kaapeväldik 12
3.1 ASR
pihustite väljalülimisega 12
3.2 ASR elektroonilise gaasiklapiga 12
3.3 ASR-i töötamine diiselmootoritel 12
5. ESP – Juhitavuskorrektor 14
5.1 Ootamatu kõrvalepõige 15
6. MSR 15
1.
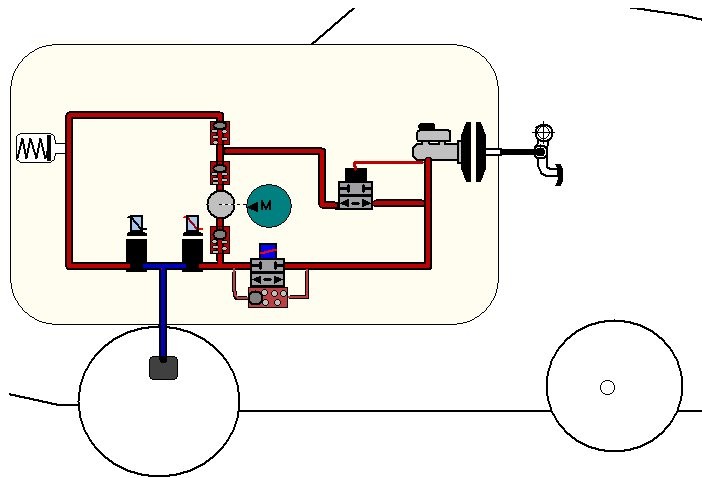
ABS- Anti- lock breaking system ( Blokeerumatud pidurid)
Juhitavuse
halvenemine on tingitud libiseva ratta külgsuunalise hõõrdejõu
vähenemisest. Blokeerunud rattal on külgsuunaline hõõrdejõud
nullilähedane. ABS-i olulisemad osad on hüdrosõlm,
juhtplokk ja autorataste juures asuvad pöörelemissagedusandurid.
Juhtplokk võrdleb pöörlemissagedus-anduritelt saadud signaale. Kui
ühe ratta pöörlemissagedus väheneb teistest kiiremini (see
tähendab blokeerumisohtu), siis hakkab juhtplokk hüdrosõlmes
asuvate elektromagnet-klappide abil pidurdusrõhku vähendama. Rõhku
vähendadakse seni kuni pöörlemissagedus hakkab uuesti suurenema.
Seejärel suurendatakse pidurdusrõhku kuni blokeerumise ohu
tekkimiseni, ning kõik kordub.
Joonis
1. ABS Skeem
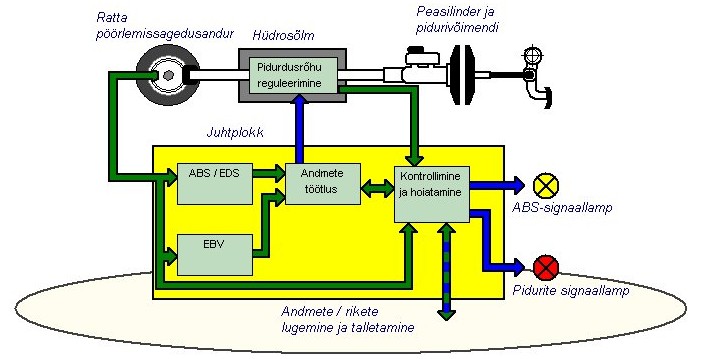
1.2
ABS- i tööpiirkond
Juhtplokk
jälgib rataste pöörlemissagedusandurite signaalide põhjal iga
ratta pöörlemissagedust ja vajadusel reguleerib mõne ratta
pidurdusrõhku. ABS/EDS-juhtplokk töötleb iga ratta andmeid eraldi
võimaldades nii kõikidele ratastele antud tingimustele vastava
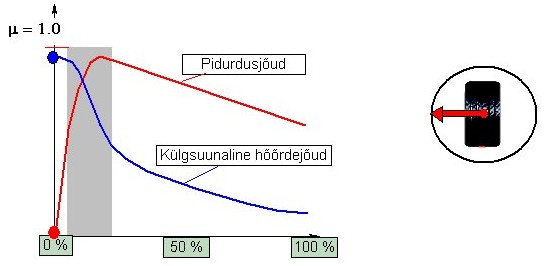
pidurdusjõu kuid vältides blokeerumise. Külgsuunaline
hõõrdejõud on suurim ratta vabal veeremisel (siduripedaal on alla
vajutatud ja
piduripedaalile ei vajutata).
Joonis
2. Libisemine 0%ABS
pidurid ei lase ratta libisemisel
suureneda üle 10...20%.
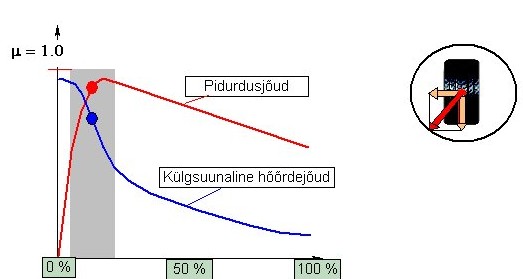
Pidurdusjõud on siin suurim ja külgsuunaline hõõrdejõud auto
juhitavuseks veel piisav. Nende resultantjõud jääb hõõrdejõu
ringi sisse.
Joonis
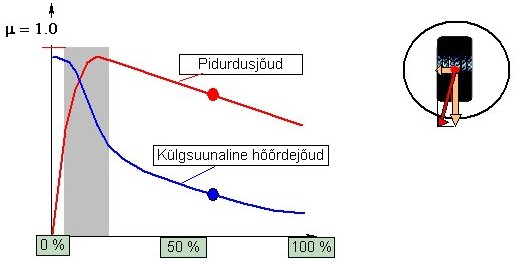
3. Libisemine 10...20%Kui
pidurdusjõud ületab haardejõu, hakkab ratas libisema.
Külgsuunaline hõõrdejõud muutub niivõrd väikeseks, et auto ei
ole enam juhitav. Töökorras ABS piduritel sellist olukorda tekkida
ei saa!
Joonis
4. Libisemine üle 20%
1.3
ABS-i tööpõhimõte
Kui
üks või rohkem rattaid hakkavad pidurduse ajal blokeeruma, siis
ABS-i süsteem reguleerib igale
rattale pidurdus vedeliku rõhku, et
vältida rataste blokeerumistja parandada stabiilsust, juhitavust ja
pidurdusmaad.ABS-i süsteem saavutab selle teatud informatsiooni
rakendamisega töötlemis protsetuuris, et kontrollida sõiduki
hüdraulika süsteemi tööd.
1.4
Andurid ja täiturid
1.4.1
Piduritulelüliti
Piduritulelüliti
jälgib piduripedaali asendit ja saadab pedaalile vajutamisel
signaali juhtplokile. Seisu- ja sõidupidurilülitid
Ohutuse
suurendamiseks ja diagnoosimise lihtsustamiseks kasutatakse
kaksiklülitit. Ühe lüliti avanemisel teine sulgub ja vastupidi.
Pidurdamise signaali saabumisel lälitub ASR välja. Pidurituled
on ühendatud läbi
relee , mis väldib ESP töötamisel
piduritulede süttimise. Seisupiduri signaali saabumisel väldib
juhtplokk ESP töötamise ajal MSR-i töö.
Joonis
5. Piduritule lüliti
1.4.2
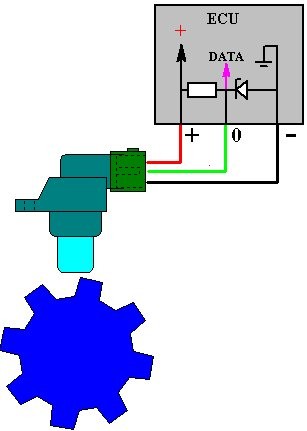
Esi- ja tagarataste pöörlemissagedusandurid
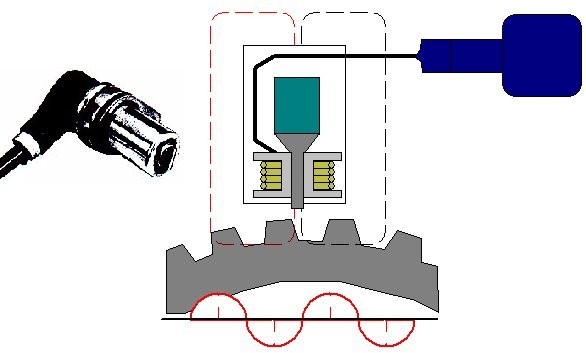
Joonis
6. InduktsioonandurHammastega
rootori ehk impulssratta kohal paiknev pöörlemissagedusandur
koosneb magnetsüdamikust ja selle ümber paiknevast mähisest. Koos
rattaga pöörlev
rootor indutseerib anduri mähises
vahelduvpinge ,
mille muutumise sageduse järgi määrabki juhtplokk ratta
pöörlemissageduse.
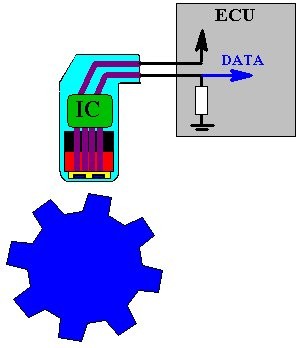
Halli andur Joonis
7. Halli andurPöörlemissagedusanduritena
on kastutusel ka selliseid Halli
andureid millel on sirmi asemel
kasutusel
samasugune hammastega impulssratas nagu
indutsioonandurilgi.
Võrreldes induktsioonanduritega on
Halli anduritel järgmised eelised:
- signaali ampiltuud ei sõltu
pöörlemissagedusest, mistõttu teda saab kasutada ka väga aeglaste
liikumiste mõõtmiseks.(võimalik mõõta ka multimeetriga).
-
signaal püsib muutumatuna ka küllalt suure õhuvahe muutuse korral
(0,1...1,5mm).
Puuduseks võib pidada
toitepinge (lisajuhtme)
vajadust ja seda, et andur ei kannata polaarsuse vahetamist ega
takistuse mõõtmist. Vedrustusest tingitud liikumise tõttu esineb
ABS anduritel sagedasti juhtmete rikkeid.
Magnettakistuslik
andurJoonis
8. Magnettakistuslik andurMagnettakistuslikud
ehk MRE andurid (M
agneto
R
esistive
E
lemnts)
meenutavad väliskujult induktsioonandurit ja tööpõhimõttelt
Halli
andurit . Anduri sees on takisti, mille takistus sõltub
magnetväljast ja magnetvoo tiheduse muutumise
suunast . Pöörlev
rootor tekitab
anduris 7…14 mA vooluimpulsi, mille sagedus muutub
koos pöörlemissagedusega.
Anduril on kaks juhet ja ta suudab
mõõta ka väga väikest pöörlemissagedust. Toitepinge on
tavaliselt 12 V ja väljundsignaal sammpinge, mille min./max.
väärtused sõltuvad juhtplokis
olevast takistist. Anduri
eeliseks on ka see, et õhuvahe küllaltki suur muutus (0,5..2 mm) ei mõjuta
signaali kuju. Mõnedel MRE-anduritel on hammastega impulssratas
asendatud magnetrattaga. See magnetratas koosneb mitmest üksteise
kõrval asuvast
magnetist .
1.4.3
ABS-i diagnoosipistmikABS
piduritel on enesediagnoosi programm, mis kontrollib süsteemi
korrasolekut.
Avastatud häirete koodid
talletatakse juhtploki
rikkemälusse. Rikkekoode on võimalik lugeda ja vajadusel
kustutada läbi diagnoosipistmiku. Enesediagnoosi programm kontrollib
pöörlemissagedusandurite, piduritulelüliti, hüdrosõlme,
ühendusjuhtmete ja juhtploki korrasolekut. Hüdrosõlme
kontrollimisel kontrollitakse lisaks elektromagnetklappide
korrasolekule ka piduritorude õiget ühendust.
Joonis
9. ABS-i diagnoosipistik1.4.4
ABS-i ja
pidurite signaallambidKorras
süsteemi puhul süttib ABS-i signaallamp süüte sisselülimisel ja
kustub mõne sekundi jooksul (enesediagnoosi lõppemisel). Sõidu
ajal rikke avastamisel süttib signaalamp uuesti ja jääbki põlema.
Süüte sisselülimisel süttib enesediagnoosi ajaks ka pidurite
signaallamp.
Pidurite signaalamp süttib ka seisupiduri
rakendamisel ja pidurivedeliku
tasapinna vähenemisel.
Joonis
10. ABS-i ja pidurite signaallambid
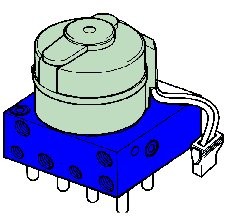
1.4.5
Hüdrosõlm
Hüdrosõlm
on paigutatud piduri peasilindri ja rattasilindrite vahele ja tema
ülesanne on juhtida juhtplokilt tulevate käskude põhjal
pidurdusrõhku rattasilindrites. Hüdrosõlm koosneb kerest,
elektromagnetklappidest, tagastuspumbast ja summutuskambritest.
Elektromagnetklappide abil välditakse rataste blokeerumine. Iga
piduriharu kohta on kaks klappi: pealevoolu- ja äravooluklapp.
Tagastuspumpa käitatakse elektrimootoriga ja tema ülesanne on
blokeerumisohu korral pumbata pidurivedelikku rattasilindritest
piduri peasilindrisse tagasi. Kogu hüdrosõlme kohta on üks
tagastuspump. Summutuskambrite ülesanne on
summutada pidurivedeliku
tagastamisel tekkivat rõhu kõikumist (piduripedaali vibreerimist).
Igal piduriharul on oma summutuskamber.
Joonis
11. Hüdrosõlm
2.
EBV - Pidurdusjõu jaotur
-
on ABS pidurite lisafunktsioon. Kasutab töötamiseks ABS-i andureid
ja elektromagnetklappe;
- aitab säilitada tagarataste
külgsuunalist hõõrdejõudu
hoides pidurdamisel
tagarataste libisemise esirataste omast 0 ... 2 % võrra
väiksemana;
- on koormustundlik, st tugeva pidurdamise
ja tühja auto korral on lubatud suurem libisemiste erinevus kui
nõrga pidurdamise ja koormaga auto puhul;
- asendab vanemate
pidurisüsteemide mehaanilist pidurdusjõuregulaatorit.
EBV
tööpõhimõteMõnedel
mudelitel on peasilindri esipiduriharu poolel rõhuandur, mille kaudu
jälgib juhtplokk haru korrasolekut. Juhul
kui tagarataste libisemine ületab lubatud piiri, suletakse
pealevooluklapp ning peasilindri ja rattapidurite vaheline ühendus
katkeb. Juhul kui libisemine ikkagi ei vähene, avatakse
äravooluklapp ja rattasilindritest lastakse osa pidurivedelikku
rõhuakudesse.
Pumpa tööle ei rakendata!
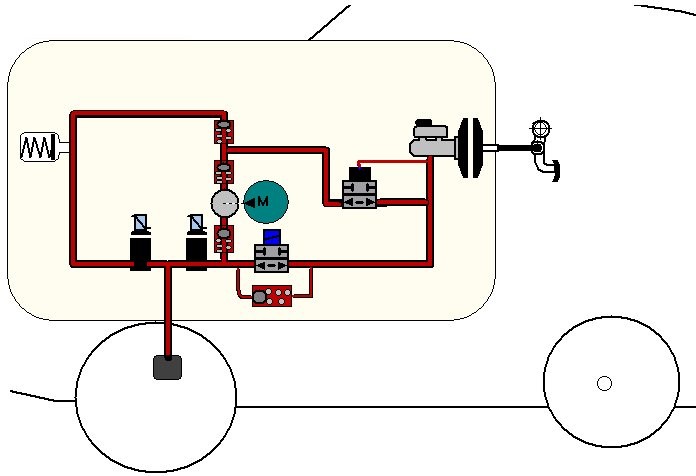
3.
EDS - Diferentsiaali lukustus
Kuna
libedal teel auto
liikumahakkamisel , kui
rattad hakkavad kaapima,
tavaliselt pidurit ei vajutata, siis on EDS-i töölerakendamiseks
vaja eraldi, rõhku tekitavat pumpa. EDS aitab libedal teel alustada
liikumist. Sõidu
alustamisel pidurdatakse kaapivat ratast ja
pöördemoment siirdatakse läbi diferentsiaali teisele rattale.
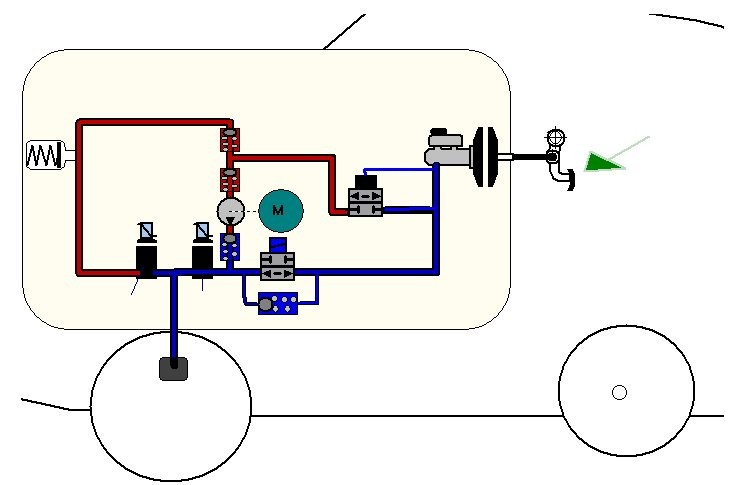
www.hmv-systems.fiEDS
tööpõhimõtePiduripedaalile
vajutamisel kandub rõhk peasilindrist hüdraulilisele
ümberlülitusklapile ja klapp sulgub. Samal ajal kandub rõhk ka
läbi avatud eraldusklapi ja pealevooluklapi rattapiduritesse.
Pealevooluklapp on normaalolukorras, kui vool mähist ei läbi,
avatud ja äravooluklapp suletud.
Rõhu
suurendamineÜhe vedava ratta kaapimisel sulgeb juhtplokk eraldusklapi ja käivitab
pumba.
Pump hakkab pumpama pidurivedelikku rattapidurisse.
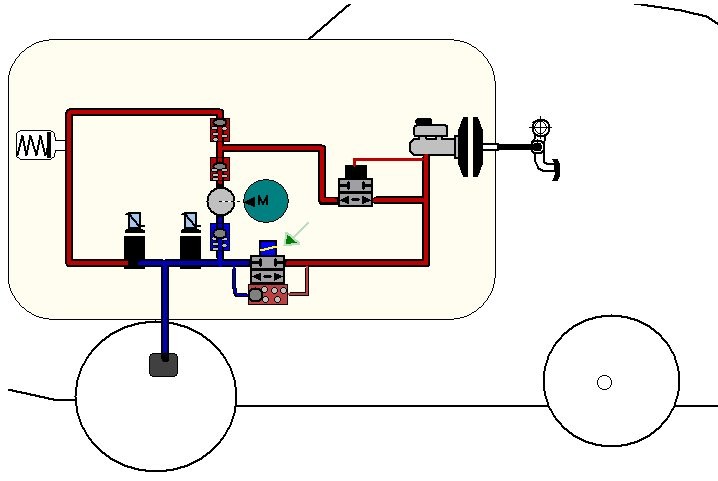
Ratast pidurdatakse kuni kaapimise vähenemiseni.Rõhu
hõoidmine
Rataste
pöörlemissageduse erinevuse vähenemisel lülitab juhtplokk pumba
välja ja sulgeb pealevooluklapi.
Äravooluklapp on endiselt
suletud.Rõhu
vähendamineRataste
pöörlemissageduste võrdsustumisel katkestab juhtplokk
pealevooluklapi vooluahela ja klapp avaneb .
3.
ASR - Kaapeväldik
-
väldib sõidu ajal rataste kaapimise (EDS - töötas ainult sõidu
alustamisel);
- veojõudu reguleeritakse vastavalt ratta
haardumisele. Kaapimise vältimiseks vähendatakse mootori
pöördemomenti:
-silinderhaaval
pihusteid välja lülitades;
-elektroonilise gaasiklapi abil;
-pritsekoguse vähendamisega (diiselmootoritel).
3.1
ASR pihustite väljalülimisega
Kaapeväldik
- ASR võrdleb pöörlemissagedusandurite abil esitelje ja tagatelje
rataste pöörlemissagedusi. ASR-i töötamise ajal süttib
armatuurlaual vastav signaallamp. Armatuurlaual on ka lüliti, kust
on võimalik ASR
ajutiselt välja lülitada. Juhul kui veotelje
rataste pöörlemissagedus muutub mittevedavatest ratastest
suuremaks , saadab ASR-i juhtplokk mootori juhtplokile "palve"
vähendada mootori pöördemomenti.
Seejärel hakkab mootori
juhtplokk kuni kaapimise lõppemiseni silindreid ükshaaval välja
lülitama.
3.2
ASR elektroonilise gaasiklapiga
Koos
elektriliste gaasiklappide bensiinimootoritele ilmumisega on ASR-i
tööpõhimõte tunduvalt lihtsustunud. Kuna
gaasipedaali ja - klapi
vahel enam mehaanilist ühendust ei ole siis on mootori pöördemomenti
väga lihtne vähendada. Selleks tuleb gaasiklapp sulgeda.
Juhul
kui veotelje rataste pöörlemissagedus muutub mittevedavatest
ratastest suuremaks, saadab ASR-i juhtplokk mootori juhtplokile
"palve" vähendada mootori pöördemomenti. Seejärel
hakkab mootori juhtplokk kuni kaapimise lõppemiseni sulgema
gaasiklappi.
Tavaliselt toimub juhtplokkidevaheline suhtlemine
läbi CAN võrgu ja ASR-i
reguleering on väga kiire ja täpne.
3.3
ASR-i töötamine diiselmootoritel
Tänapäeva
diiselmootoritel töötab ASR analoogiliselt bensiinimootori
omaga .
ASR juhtplokk võrdleb vedavate ja mittevedavate rataste
pöörlemissagedust ja erinevuse korral "palub" mootori
juhtplokil vähendada pöördemomenti. Seepeale vähendab mootori
juhtplokk kuni kaapimise lõppemiseni pritsekogust.
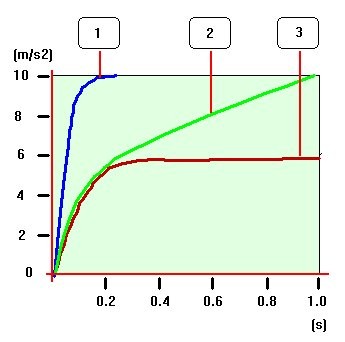
4.
BAS - HädapidurduskorrektorPaljud
autojuhid vajutavad hädaolukorras piduripedaalile harjumuspärase
tugevusega oodates piduritelt samasugust aeglustust nagu
aeglase piduripedaalile vajutamise korral. Tegelikult on aga järsul
pedaalile vajutamisel alguses aeglustus väiksem (vt.
piduriassistendi mõju).
Piduriassistendi abil saavutavad pidurid
hädapidurduse korral maksimaalse aeglustuse kohe, kui
liikumiskiirus on kõige suurem, ja seetõttu on ka
peatumisteekond oluliselt lühem.
Rataste blokeerumise hoiab ära ABS. Hädapidurduse korrektori
ülesanne on tekitada hädaolukorras, kui
autojuht vajutab kiiresti
piduripedaalile, pidurisüsteemis kiire rõhutõus. Hädapidurduse
korrektor - BAS võib olla integreeritud juhitavuskorrektoriga - ESP
ja tekitada ESP töötamiseks vajalikku eelrõhku. Hädapidurduse
korrektor millele lisafunktsioone integreeritud ei ole, võib olla ka
ilma elektrilise juhtimiseta.
Aeglustuse
graafik:
1 = BAS võimendiga
2 = ilma BAS
võimendita
3 = nõrk pidurivajutus
5.
ESP – Juhitavuskorrektor
Väldib
üksikute rataste pidurdamisega ning mootori ja jõuülekande töö
korrigeerimisega auto muutumist üle- või
alajuhitavaks.Juhitavuskorrektori tähistamiseks kasutatakse ka
lühendeid ASMS, DSC, FDR, VSA, VSC
Ala-
ja ülejuhitavusAlajuhitavuse
korral pöördub auto vähem kui rooliratta asend seda eeldab.
Auto
üritab kurvist välja sõita.
Auto
alajuhitavuse vähendamiseks pidurdab ESP
kurvi sisepoolset
tagaratast.
Ülejuhitavuse
korral pöördub auto rohkem kui rooliratta asend seda eeldab.
Auto
üritab kurvist sisse sõita.
Auto
ülejuhitavuse vähendamiseks pidurdab ESP kurvi välispoolset
esiratast.
5.1
Ootamatu kõrvalepõige
Ilma
ESP- taAutojuht
märkab takistust ja keerab rooli järsult vasakule. Rehvide
läbipaindumise tõttu muutub auto alajuhitavaks. Autojuht pöörab
rooli veel rohkem. Auto alustab pööramist ja juht keerab rooli
kiiresti paremale tagasi. Auto alustab parempööret.
Rehvid painduvad nüüd
vastassuunas , auto muutub ülejuhitavaks ja läheb
külglibisemisesse. Auto muutub juhitamatuks ja hakkab ümber oma
püsttelje pöörlema
.
ESP-gaAuto
alustab pööramist. ESP saab andmed auto alajuhitavusest ja pidurdab
pööramise suurendamiseks vasakut tagaratast. Auto pöördumisel
vasakule hakkab autojuht pöörama rooli paremale. Juhitavuse
säilitamiseks pidurdab ESP parempoolset esiratast. Tagarattad
veerevad vabalt. Kiire suunavahetus võib muuta auto ülejuhitavaks.
Juhitavuse säilitamiseks pidurdab ESP nüüd vasakpoolset esiratast.
Kui auto juhitavus on taastatud (auto ei ole üle- ega alajuhitav),
lõpetab ESP töötamise.
6.
MSR
MSR
on ABS-i lisafunktsioon, mis väldib rataste blokeerumise
gaasipedaali järsul vabastamisel. Eriti hästi on MSR-i efektiivsus
tunda võimsa mootoriga tagaveolisel masinal. Gaasipedaali järsul
vabastamisel võib libedal teel tekkida olukord, kus mootorpidurduse
tõttu hakkavad vedava silla rattad libisema. Selle vältimiseks
saadab ABS/MSR juhtplokk, hetkel kui rataste libisemine ületab
lubatud piiri (8...20%), läbi CAN võrgu mootori juhtplokile teate
ning mootori juhtplokk suurendab mootori pöörlemissagedust.


































Kõik kommentaarid