Eestis asuvatel üleeuroopalisse teedevõrku kuuluvatel teedel.3 Liiklusohutustasemest rääkides on peamiseks mõisteks liiklusõnnetused. Läbi toimunud liiklusõnnetuste arvu on võimalik hinnata meie teede liiklusohtlikkust või ohutust. Liiklusõnnetuse mõiste on määratletud liiklusseaduses. Liiklusõnnetuseks loetakse juhtum, kui selles osaleb vähemalt üks sõiduk. Sellest tingituna saab sõiduauto ostasõidu paiksele takistusele määratleda ühesõidukiõnnetusena, kus mootorsõiduki ümberpaiskumise või teelt väljasõduga kaasneb kokkupõrge puu, seisna või mõne muu väljaspool teed asuva objektiga.4 1 Maanteeamet, ,,Liiklusaasta 2016 kokkuvõte", [ https://www.mnt.ee/sites/default/files/news- related-files/2016_vol_6.pdf] (05.10.2017) 2 Vabariigi Valitus, ,,Eesti Rahvusliku liiklusohutusprogramm aastateks 2016-2025", [https://www.valitsus.ee/sites/default/files/content-
Selle distantsi maailmarekord, tulemusega 7:20.67, kuulub keenialasele Daniel Komenile. Talle kuulub ka 3000m maailmarekord sisetingmustes, tulemusega 7:24.90. Eesti rekord 3000m jooksus kuulub ajaga 7,48,94 Toomas Turbile, mille ta püstitas 29. Juulil 1981 aastal Budapestis. 3000m jookstakse ka takistusrajal, 3000m takistusjooksu maailmarekord ajaga 7:53.63 kuulub Katari jooksjale Saif Saaeed Shaheenile. Takistusjooksus on 5 takistust ringi kohta, tõkke kõrgus on 914mm. Neljandale takistusele, mis asub teises kurvis järgneb ka vee takistus. Distantsi peale kokku peavad jooksjad ületama 28 tavalist tõket ning 7 veega takistust. Kasutatud kirjandus http://www.iaaf.org/records/toplists/middlelong/3000-metres/outdoor/men/senior http://en.wikipedia.org/wiki/3000_metres_steeplechase
kuid juhi temperatuuri tõusuga eritakistus kasvab ja juhtivus halveneb. Juhi materjali elektrijuhtivuse sõltuvust temperatuurist iseloomustab takistuse temperatuuritegur. Normaaltingimustel avaldavad kõik materjalid laetud osakeste liikumisele vastupanu, mida nimetatakse elektritakistuseks ehk takistuseks. Juhi takistus sõltub materjali eritakistusest, juhi pikkusest, ristlõikepindalast ja temperatuurist. Vooluga juhtmes eraldub alati soojust vastavalt juhi takistusele. Kuna kõrgel temperatuuril juhid sulavad, siis on mingist kindlast materjalist ja kindlate mõõtmetega (ristlõikega) juhi maksimaalne voolutugevus, millele ta vastu peab. See on eriti oluline trükkplaatide ja mikroskeemide (kiipide) puhul, sest nendes on juhtide ristlõiked suhteliselt väikesed.
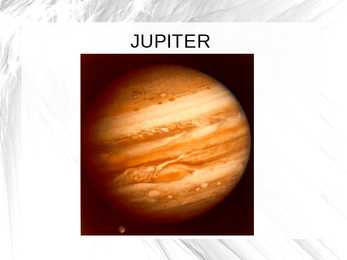
kõrge energiaga heeliumi ioone. Jupiteril on ähmaseid rõngaid nagu Saturnil, kuid palju väiksemad (paremal). Need on pildistatud infrapunases kiirguses maapealsetest teleskoopidest. Erinevalt Saturnist, on Jupiteri rõngad tumedad (albeedo umbes .05). Arvatavasti koosnevad nad väga väikestest kivise materjali teradest. Osakesed Jupiteri rõngastes ei püsi seal kaua (vastavalt atmosfäärilisele ja magneetilisele takistusele). Seetõttu, kui rõngastel on jäävad tunnused, peavad nad saama pidevalt uut gaasilist ainet. Väikesed kaaslased Metis ja Adrastea, mis tiirlevad rõngaste sees, on ilmsed gaasilise aine allikate kandidaadid. Öises taevas on Jupiter tihti heledaim "täht" taevas (ta on tumedam ainult Veenusest, mis on harva nähtav tumedas taevas). Neli Galileo kuud on kergesti nähtavad binoklitega; mõned rõngad ja Suur Punane Laik on nähtavad väikeste astronoomiliste teleskoopidega.Jupiteril on
Andmeid suudetakse sisestada kuni 67 korda sekundis Ruumi navigeerimine Selleks saadetakse infrapunasignaalid anduritega laiali. Infrapuna vastuvõtja, mis asub kaitserau peal, kontrollib kaua kulub selleks aeg, millal signaalid tagasi põrkuvad. Samuti peab Roomba teadma, kuhu ta ei tohiks minna. Ta väldib takistusi nelja infrapuna anduriga. Andurid saadavad pidevalt välja infrapuna signaale ja Roomba ootab signaalide tagasipõrkeid. Kui ta läheneb takistusele, siis signaal lõpuks kaob ning Roomba saab aru, et peab suunda vahetama. Kui Roomba millegagi kokku põrkab ja kaitserauale vajutatakse, siis mehaanilised objekti andurid aktiveerivad puudutuse ja annavad teate, et on tekkinud takistus Ta pöörab ennast seni, kuni leieb selge sihi. Roombal on ka teine infrapuna sensor, mida me nimetame seina või barjääri sensoriks. See sensor asub paremal pool kaitseraual, mis laseb Roombal liikuda seina või mõne
sek -220V ja 50x sek see vool üldse puudub. 8.Aktiivtakistus- selle all mõeldakse samasugust takistust, mis on kehal ka alalisvoolu korral. Tähis: R(oom) I=U/R 9.Mahtuvustakistus- mahtuvus on nt kondensaatoritel. Kui alalisvoolu korral asetada kondensaator vooluringi, siis vool teda ei läbi. Tähis: Xc. Valem: Xc=1/2fc 10. Pooli juhtmete takistus ei sõltu voolu liigist, seega peab vah.voolu korral pooli juhtmetega takistusele lisanduma veel üks takistus-ind.tak. Selle tekke põhjuseks on eneseind. Nimelt vah.voolu korral tekib poolis eneseind.vool, mille suund on vastupidine ehk ra takistab põhivoolu liikumist. Tähis: X(L)=2fL(oom). Ideaalse pooli korral (traadi takistus on tühine) kehtib Ohm'i seadus I=U/X(L) 11. Sellise vooluringi kogutakistus, kus on asetatud kõik kolm takistuse eriliiki jadamise vah.voolu võrku, ei võrdu üksikute takistuste summaga. Tähis:Z. Valem: Z=R² +(X(L)-Xc)² (X(L)- ind
ühendus eri pingega juhtide vahel, kui rikkevoolu- ahel sisaldab tarviti takistust. 129 Lühise ja maaühenduse korral reageerib lühiskaitse, kereühenduse korral võib tekkida inimkeha läbiv rikkevool. Rikkevoolu suurus sõltub keha elektri- takistusest ja voolu kulgemise teest läbi keha. Joonisel on kujutatud inimese kehaosade näivtakistus. Pinge all oleva kehaga kokkupuutel lisanduvad inimkeha takistusele RK puutekohtade ülemineku- takistused Rü1 ja Rü2. Üldiselt loetakse inimesele ohutuks 10...20 mA voolu. Suurem vool kutsub esile lihaste krampe, hingamishäireid ja halvemal juhul ka südamelihaste värelemise ehk fibrillatsiooni, mille tagajärjel võib lakata vereringe ning aju verevarustus. Kui aju ei saa umbes 5 minutit verd, võib järgneda surm. Ohtlikkus sõltub voolu suurusest ja kestusest. Kõige ohtlikumaks peetakse voolu läbi parema käe ja
.... R 2=R1(1+ alfa delta T) kus R 1 takistus on madalamal temp t1 R1-kõrgemal temp.l t2 deltaT=t2-t1. Alfa takistus temp. Tegur leitakse tabelist. Eritakistus- nim. ühikuliste mõõtmetega juhitakistust. Nt.vase roo SJ süsteem on 1,7x10 -8 oom/m s.t.1m pikkuse 1m2-se ristlõikepindalaga vaskjuhi takistus on 1,7x10-8oom mm2/m Tarvikute ühendusviisid 1) jadaühndus a) kogutakistus R=R1+R2.... b) kogu vool I=I1=I2.... (vool on ühesugune igas punktis) c) kogu pinge U=U1+U2.... d) suuremale takistusele langeb kõrgem pinge e. pingelaengud on takistustega võrdelised R1/R2= U1/U2 2) rööpühendus a)kogu vool I=I1+I2.... b) kogu pinge U=U1=U2... c) kogu juhtivus (takistuse pöördväärtus) 1/R= 1/R1+ 1/R2 .... d) väiksemat takistust läbib tugevam vool(takistusega pöördvõrdelised) R1/R2= I2/I1 3) segaühendus- sisaldab nii jada kui rööposasid a) leitakse rööposa takistus R2,3 b)kogu takistus R=R1+R2,3
4 Väikeste osakeste läbimõõdu määramine gaaslaseri abil Teooria Väikest osakest läbimõõtu määratakse valguse difraktsiooni mõiste abil. Valguse difraktsiooniks nimetatakse valguslainete paindumist tõkete taha ja levimist geomeetrilise varju piirkonnas. Tõkkeks võib olla näiteks kitsas pilu või väike osake. Difraktsiooni väikeselt kerakujuliselt osakeselt. Kui suunata laserikiir väikesele kerakujulisele takistusele, siis difraktsioonipildil võib näha vaheldumisi tumedaid ja heledaid kontsentrilisi rõngaid. Ühe osakese korral on rõngaid raske näha valguse foonil, mis langeb ekraanile otse. Kui kiirte teele panna suur hulk kaootiliselt asetsevaid osakesi, siis difraktsioonipildi intensiivsus suureneb, kusjuures intensiivsuse jaotus on samasugune kui ühe osakese puhul. Difraktsiooninurk (otsese ja difrageerunud kõrvale
9. Elektromotoorjõud Seadmeid, mis säilitavad juhi erinevais punktides teatud potensiaali nimetatakse emj allikateks. Emj on arvult võrdne maksimaalse pingega, mida antud allikas tekitab. Emj on võrdne laengu ümberpaigutamisel kogu suletud vooluringi ulatuses tehtud töö ja laengu suuruse suhtega. 10. Elektritakistus Juhi omadust avaldada laengute liikumisele takistavat vastumõju nimetatakse elektritakistuseks. 11. Elektritakistuse sõltuvus temperatuurist Temperatuuri mõju takistusele iseloomustabtakistuse temperatuuri tegur. Takistuse temp tegur näitab, millise osa takistusest alg temperatuuril(tavaliselt 20ºC) moodustab takistuse juurde kasv temperatuuri tõusul 1ºC võrra. 12. Ohmi seadus Voolutugevusahela lõigus on võrdeline lõigu otstele rakendatud pingega ja pöördvõrdeline lõigu takistusega. 13. Töö ja võimsus -------------------------------------------------EI TEA-------------------------------------------- 14. Kirchoffi I seadus
•Viskoossus – vedeliku osakeste omavahelise hõõrdumise e. sisehõõrde mõõt. •Vedeliku viskoossus sõltub temperatuurist ja rõhust •Temp. suurenemisel väheneb, rõhu suurenemisel suureneb •Rõhk hakkab viskoossust märgatavalt mõjutama rõhkudel üle 200 bar. 21. 22.Hüdrauliline löök (seletus, näide) •Vedeliku rõhu äkiline suurenemine torustikus. •Tingitud tihti voolava vedeliku inertsist. Vooluteesulgemisel püüab vedelik jätkata liikumist ning avaldab takistusele survet. 23. Kavitatsioon (protsessi seletus, näide) 24.Gaaside parameetrid, ideaalgaas •Üldparameetriteks rõhk, temperatuur, tihedus ja ruumala. Rõhust ja temperatuurist sõltuvate suuruste fikseerimiseks normaaltingimuste mõiste. •Normaalrõhk: p = 1,01325 bar = 760 mmHG •Normaaltemperatuur: T = 273,15 ŗK = 0 ŗC •Normaalkuupmeeter – 1 kuupmeeter gaasi, mille rõhk on 1,01325 bar ja temperatuur 0 ŗC 25.Ideaalgaasi seaduspärad konstantse rõhu, mahu, temperatuuri korral
jäljendada selle abil iseorganiseerumise põhimõtet. Refleksiivsed robotid jäljendavad mõnda loomadel esinevat lihtsat refleksi, s.t. etteprogrammeeritud käitumismustrit. Näiteks vastata ühesugusele välisärritusele alati sama tegevusega. Üks võimalikke tehniliselt lihtsast näitest oleks lahendus, kus infrapunaanduri abil detekteeritakse lähedal asuvaid takistusi, mille peale pöörab taoline robot alati takistusele vastassuunas. Käitumispõhiste robotite teooria, mida on arendatud üle 10 aasta, tõestab, et primitiivseid käitumisi (reflekse) omavahel kombineerides on võimalik saavutada keerulisi käitumismustreid, mis jätavad mingil määral mulje intelligentsest käitumisest. Selle hüpoteesi kohaselt on intelligentne käitumine saavutatav lihtsate primitiivsete sensomotoorsete paaride omavahelisel ühendamisel. Näiteks kui takistuste vältimise
mille suhtes kehade liikumist uuritakse. Newton kirjutab: ,,Inertsijõudu avaldab keha ainult siis, kui temale rakendatud teine jõud tekitab muutuse tema liikumisolekus. Selle inertsijõu avaldust võib vaadelda kahesuguselt: nii omaenese vastupanuna kui ka survena; omaenese vastupanuna niivõrd, kuivõrd keha paneb vastu temale mõjuvale jõule, püüdes säilitada oma liikumisolekut; survena niivõrd, kuivõrd seesama keha, jäädes vaevaga alla temale vastupanevale takistusele, püüab muuta selle takistuse olekut." Ehk siis Newtoni I seadus kõlab järgmiselt: Objekti liikumishulk on võrdne tema massi ja kiiruse korrutisega. Newtoni esimene liikumisseadus väidab, et objekti liikumishulk jääb konstantseks kuni sellele mõjub jõud. Näiteks, raamatu leht on paigal, kuni sa pöörad seda või puhub sellel tuul. Mõlemal juhul paneb jõud lehe liikuma ja muudab tema liikumishulka.
Thebe Galilei kuud Io, Europa, Ganymedes, Callisto välisgrupi kuud Leda, Himalia, Lysitheia, Elara kaugeim kuude grupp Ananke, Carme, Pasiphae, Sinope Galilei kuud on planeediväärsed ning näha tavalise prismabinokliga. Ülejäänud kuud on juhuslikult Jupiteri mõjupiirkonda sattunud asteroidid, mida leitakse tulevikus suure tõenäosusega veel. Jupiter aeglustab vähehaaval kiirust vastavalt loodete takistusele, mida tekitavad Galilei kuud. Samuti muudab sama loodete jõud kuude orbiite, sundides neid eemalduma Jupiterist. Jupiter koos oma kaaslastega on nagu miniatuurne Päikesesüsteem. Jupiteri kaaslaste avastamine kinnitas Koperniku õpetust, et Maa pole maailma "keskpunkt", mille ümber tiirlevad kõik taevakehad. Galilei kuud IO Jupiterile lähim Galilei kuudest Albeedo on 0,6 Keskmine pinnatemperatuur on -50°C
liikluse korral. Sõit videvikus, öine sõit udus ja väsimus võivad esile kutsuda nägemisviirastust. Pimestamisohu korral tuleb kõigepealt kiirust vähendada, jälgida tee parempoolset äärt ja mitte vaadata vastutuleva sõiduki tuledesse. Pimestamise korral tuleb autot pidurdada sõidurada muutmata, sest teepeenrale pööramisel võib otsa sõita seal liikuvale jalakäijale ja sõiduraja muutmisel on oht sõita otsa nähtamatuks jäävale takistusele. LIIKLUSPSÜHHOLOOGIA Kiiruse tunnetamine. Pikaajalisel sõitmisel suure kiirusega, õige kiiruse tunnetus väheneb, autojuht hindab oma kiirust tegelikust väiksemaks. Kiiruse vähendamisel jääb juhile mulje, nagu sõidaks ta väga aeglaselt. Väike pikivahe eessõitjaga tundub olevat juba täiesti piisav. Väheneb ka keskendumis- ja reageerimisvõime. Sama efekti on täheldatud ka sõitmisel laial, hea kattega ja sirgel teel vastu-
näidendiga „Aleksander Suur“. Kaks aastat hiljem kujunes aga tõeliseks triumfiks „Andromache“. Corneille oli selleks ajaks juba varju jäetud. Racine asetab enda tegelased üha julmadesse piirolukordadesse, kus nad peavad võitlust iseenda ja oma tunnetega. Racine ei kiida heaks oma tegelaste nõrkusi, ent ta loobub kindlalt nende isealiseerimisest, näidates elu reaalseid tunge ja tõukejõude. Tema loomingus ei leida ka jõude, mis pidurdaksid või leevendaksid kirgi. Kui kirg satub takistusele, sünnitab see uue, vastandliku kire. Ka klassitsistlikus komöödias valitsesid kindlad normid, mida näitekirjanikud pidid järgima. Ideaalis oli komöödia 5-vaatuseline värssteos, mis tingimata pidi ühendama meelelahutusliku õpetlikuga, aitama kaasa ühiskonna kommete parandamisele. Komöödias kui niiöelda kergemale zanrile vaatasid akadeemikud leebemalt, seal võisid vabadused olla märksa suuremad kui tragöödias.
4. Viskoossus – vedeliku osakeste omavahelise hõõrdumise e. sisehõõrde mõõt. Vedeliku viskoossus sõltub temperatuurist ja rõhust • Temp. suurenemisel väheneb, rõhu suurenemisel suureneb • Rõhk hakkab viskoossust märgatavalt mõjutama rõhkudel üle 200 bar. 5. Hüdrauliline löök – Vedeliku rõhu äkiline suurenemine torustikus. Tingitud tihti voolava vedeliku inertsist. Vooluteesulgemisel püüab vedelik jätkata liikumist ning avaldab takistusele survet. Vähendamise võimalused: • Liikuva massi piiramine • Liikumiskiiruse vähendamine • Löögile alluva vedeliku ruumala suurendamine • Rõhuaku kasutamine • Kaitseklapi kasutamine • Lülitusaja pikendamine. 6. Kavitatsioon – nimetatakse nähtust, kui vedeliku voolamisel voolu pidevus katkeb ja vedelikku tekivad tühikud ehk kavernid. Tühikute teke on seotud vedeliku rõhu langemisega alla tema aurumise kriitilist rõhku
= IR + Ir kus IR on U vooluallika klemmipinge U = - Ir Mis on vooluallika elektromotoorjõud? Suurust mis on võrdne positiivse ühiklaengu ümberpaigutamiseks tuleva kõrvaljõudude tööga nim. elektromotoorjõuks E. E=A/q (V)volt. On võrdne vooluallika maksimaalse klemmipingega. Millest sõltub juhi takistus? juhi takistus sõltub materjalieritakistusest, juhi pikkusest, ristlõikepindalast ja temperatuurist. Vooluga juhtmes eraldub alati soojust vastavalt juhi takistusele. Kuna kõrgel temperatuuril juhid sulavad, siis on mingist kindlast materjalist ja kindlate mõõtmetega (ristlõikega) juhi maksimaalne voolutugevus, millele ta vastu peab. See on eriti oluline trükkplaatide ja mikroskeemide (kiipide) puhul, sest nendes on juhtide ristlõiked suhteliselt väikesed. R=l/S R=R0(1+t), kus R0 on takistus 0'C juures ja takistuse temp. tegur. Kuidas arvutada vooluringi lõigu kogutakistust takistite jada- ja rööpühenduse korral?
kui seade on vooluahelaga ühendatud. Mõõteseadmega tekitatud maksimaalne pinge on 50 v AC E ja C väljundite vahel, mille tõttu ei tohi vooluahelat mõõtmise ajal puutuda. 4 III OSA: Ettevalmistus mõõtmiseks Ühendage mõõteseade vastavate värvidega tähistatud klemmidega. Klemmid on aknalaua all asuval karbikul. Klemmid on kahes reas: ülemine ja alumine, kusjuures üks rida vastab märja ja teine kuiva pinnase takistusele. Tabelisse kannate ühe tulemuse ja valite vastavalt sellele parandusteguri. Õige parandusteguri valimisel on „võimalik suurim“ praktiliselt sama sõltumata, millist mõõdetud arvväärtust kasutasite. IV OSA: Mõõtmine 1. Keerake funktsioonilüliti (4) asendisse “EARTH VOLTAGE”. 2. Kui LCD ekraanile (1) ei ilmu toiteelemendi sümbolit on seade mõõtmiseks valmis. 3. Kui ekraanile ilmuv väärtus on vähem kui 10 V on maandusahela pinge lubatud piirides. 4
Organismi läbiv vool põhjustab närvisüsteemi häireid,lihaste krampe,südame arütmiat või seiskumist,hingamis lihaste töö lakkamist ,põletushaavu . 47.Nimetage tüüpilisi voolu teekondi läbi inimkeha elektritraumade puhul.lk 259 Inimkeha peamise takistuse moodustab naha takistud. Voolu teekonnal ühest käest teise jääbki ainsaks takistuseks inimkeha takistus,kui vool kulgeb käest läbi keha ja jalgade maase siis liitub keha takistusele veel jalatsite ja põranda takistus. Seega suurendavad voolujuhtivad ja niisked jalanõud ning voolujuhtiv põrand ohtu. Suurim vool tekib siis ,kui inimene seiseab paljajalu palja maapeal . 48.mis on sammupinge ja millises olukorras võib ta esineda?lk259 Välgu puuse või pingestatud juhtme maha langemisel voolab laeng mööda maad laiali ning maapinnal takistuse tõttu tekib ta kahe punkti vahel pinge( U=I * R) nn.sammupinge
Harjutused matil veeretamine, kiikumine. 5 – 6 aastased Kõnd/jooks kolonnis, ühekaupa, peatustega, takistustega, erinevas tempos, kitsal rajal, rütmi järgi, kandadel, päkkadel, edasi-tagasi, pöia sise- ja välisserval, kükk-kõnd. Hüppamine sulghüplemine paigal, pööretega, harkihüplemine paigal, liikudes, põlvetõstehüplemine paigal, edasiliikumisel, galopp vasakule, paremale, hüplemine ühel jalal, sügavushüpped, kaugushüpe paigalt, hoojooksult hüpe üle takistuse ja takistusele, kõrgushüpe otsehoolt, hüpitsaga hüplemine. Pall viskamine üles, maha, vastu seina ja püüdmine, vise vert. märklauda, paarilisele parema ja vasaku käega, läbi rippuva rõnga. Palli põrgatamine kahe käega, vasaku ja parema käega. Rõnga veeretamine. Roomamine kõhuli ja selili põrandal, võimlemispingil. Pugemine tunnelis lisaülesannetega, takistuste all. Ronimine varbseinal vahelduva sammuga, toengpõlvituses kaldlaual, ripped köiel, vahenditel.
· obstruktsioon (obduratsioon) arteri valendiku ahenemine ja sulgus trombi, emboli või sooneseina põletiku, ateroskleroosi puhul · kompressioon arteri ahenemine surve tõttu näit. kasvaja, võõrkeha tõttu, magamisel, isumisel surve arterile · venoosse hüpereemia tüsistus mõnes organis, kus leidub vähe kollateraalveresooni (mesesnteerium) tõuseb kapillaaride hüdrostaatiline rõhk, turse, verevalandused viivad verevoolu takistusele (venoosne isheemia) Kolm esimest võivad viia arteriaalse infarktini, viimane venoosse infarktini. · isheemia vere ümberpaiknemise tagajärjel (nt minestus, sokk, käe üleval hoidmine) Infarkt- infacire- täis toppima nekroosikolle, mille põhjuseks on kas arteriaalse juurdevoolu või venoosse äravoolu takistusest tingitud isheemia (isheemiast tingitud nekroos). Enamasti on tegemist koagulatsiooninekroosiga, st. kolle on tihke, ajukoes aga tekib
srra ajutrombi tõttu on suurenenud viis korda. Kiireimaks efektiivseks ravivõtteks on siiani flebotoomia. Loomulikult tuleks edasiseks raviks võimalusel eemaldada erütrotsütoosi algne põhjus Hüperleukotsüütiline leukemia Haigus kätkeb endas valgete vereliblede hulga tõusu. Umbes 5% leukeemiahaigetel patsientidel on lisaks valgete vereliblede rohkusele ka sümptomid, mis viitavad mingile veresoone takistusele kopsus, ajus, reetinas ja vahel ka muus organis. Lichtman on oma katsetes näidanud, et valgelibled võivad mõjutada vere viskoossust samuti nagu erütrotsüüdidki, vastavalt sellele, kui suurt mahtu nad omavad suspensioonis. Kuna nad on vähem võimelised deformeeruma kui erütrotsüüdid siis on ka nende mõju rohkem väljenduv ja viskoossuse suurenemist võib täheldada kui nende konsentratsioon ületab 0,15. Kuid selleks peab leukotsüütide hulk olema 300 000/µl akuutse või kroonilise
4 düüs Takistuse minimaalne d × 2 sõltuvus vedeliku viskoossusest tänu 4 lühikesele takistusele Sele 9.4 - Takistuse ristlõikepindalad konstantse suurusega takistustele 91 Tallinna Tööstushariduskeskus Voolamist reguleerivad ventiilid Reguleeritavate takistuste korral sõltub Vedeliku viskoossusest sõltuvad takistid reguleerimiskarakteristik takistuse ristlõikest (sele 9.5). Sele 9.6 Mõlemasuunalise toimega
Elektritakistuse pöördväärtust nim. elektrijuhtivuseks. G = = 1S (siimens) R 1 1 m Eritakistuse pöördväärtust nim erijuhtivuseks = * mm 2 (Gamma) 11. Elektritakistuse sõltuvus temperatuurist + ül 1 Temperatuuri mõju takistusele iseloomustab takistuse temp. Tegur (alfa) = K = K -1 0*K= -273*C Takistuse temp. Tegur näitab, millise osa takistusest alg temperatuuril (tavaliselt 20*C) moodutab takistuse juurdekasv temp tõusul 1*C võrra R2 - R1 = · (t 2 - t1) R2 =R1(1+2t) R1 12
lahendamisega; võimaldab vastata keskkonnale paindlikult ning pühenduma ettekavatsetud eesmärgile suunatud mõtetele ning tegudele. Barkley (1997) mudel liigitab töömälu ka täidesaatva funktsiooni mõiste alla) koolikeskkonnas laste hulgas, kellel on võrreldes nende eakaaslastega täheldatud kõrget või madalat tähelepanuoskust. Vastavast empiirilisest ja teoreetilisest kirjandusest selgub, et vastamine takistusele ja töömälu omavad seost tähelepanuoskustega. Seega on oodatud, et uuritavatel on võrreldes kaaslastega madalam töömälu ja takistusega tegelemiseoskus. 2. 2. 2. Meetodid Uuringus kasutati nii kuulmismälu- kui ka nägemismälu hindamist. Töömälu hinnati kasutades üheksat ülesannet. Neli olid sõnalised ülesanded, kus tuli meenutada numbreid, sõnade nimekirja meenutamine, mittesõnaline meenutamine ja sõnade
Tema magnetväli on tugevam kui Maal. Esineb kiirgusvöönd.Üle planeedi liiguvad ka suure kiirusega tuuled, mis piiratakse avaratel pikkuskraadide vöötidel. Jupiteril on ähmaseid rõngaid nagu Saturnil, kuid palju väiksemad. Erinevalt Saturnist, on Jupiteri rõngad tumedad. Arvatavasti koosnevad nad väga väikestest kivise materjali teradest. Osakesed Jupiteri rõngastes ei püsi seal kaua (vastavalt atmosfäärilisele ja magnetilisele takistusele). Väikesed kaaslased Metis ja Adrastea, mis tiirlevad rõngaste sees, on ilmsed gaasilise aine allikate kandidaadid.1994 aastal põrkas Comet Shoemaker-Levy 9 kokku Jupiteriga. Kokkupõrke tulemused olid selgelt nähtavad isegi amatöörteleskoopidega. Öises taevas on Jupiter tihti heledaim "täht" taevas (ta on tumedam ainult Veenusest, mis on harva nähtav tumedas taevas). Saturn Saturn on kuues planeet Päikesest ja suuruselt teine. Ta sarnaneb üpris palju Jupiteriga,
Frustratsioon on ebaõnnestumise elamuskompleks. Rohkem alluvad frustratsioonile emotsionaalsed natuurid, kõrgenenud erutuvusega isikud, kelle pidurdusprotsessid on suhteliselt nõrgemini arenenud ning kes pole raskustega harjunud. Frustratsioonireaktsioonidel on kaks põhitunnust: Impulsiivsus Tolerantsus (taluvus) Kui mingi takistus blokeerib inimese tegevuse, võib ta reageerida agressiivse tegevusega, mis on suunatud takistusele või ka mõnele kõrvalisele, kuid kättesaadavale, jõukohasele objektile. Volf Merlin on liigitanud võimalikke reageeringutüüpe frustratsiooniseisundile järgmiselt: 1) Enesevalitsus 2) Tigedus teise vastu 3) Probleemi ülehindamine (,,keegi ei suuda seda lahendada") 4) Ärevus (,,see probleem ei anna mulle rahu") 5) Depressioon 6) Agressioon. (Bachmann ja Maruste, 2003: 226) 2.5 Afekt
51. Mille eest tuleb kaitsta elektrimootorit? http://www.ene.ttu.ee/elektriajamid/oppeinfo/AAV5420/5.htm 52. Relee tööpõhimõte. Relee on seadis, mis välisele füüsikalisele toimele reageerides muudab hüppeliselt oma väljundtoimet (väljundsignaali). Relee on aparaat, mis peale hüppelise toimega releeosa sisaldab ka andurit ja võrdlus- , täitur- vm seadist. Elektrilised releed reageerivad elektrivoolu tugevusele, pingele, sagedusele, võimsusele, elektriahela takistusele, induktiivsusele või mahtuvusele. Releed ja kontaktorid on elektromagnetilised seadised, kus vooluga pooli südamiku liikumise tulemusena suletakse või avatakse elektrilised kontaktid; releedeks nim ka kontaktidega andureid, kus elektrilised kontaktid avatakse või suletakse muul viisil tekitatud liikumise tulemusena. 53. Trafo tööpõhimõte. Tarbijad vajavad mitmesuguseid pingeid. Oluline on pinget muuta ka elektrienergia ülekandmisel kauge maa taha
töötamisel oleks pinget maha võetud. 1-faasiline lülitumine Kasutatakse maandatud ja isoleeritud neutraaliga võrke. Antud juhul sõltub inimest läbiv voolutugevus sellest, milline on inimesega järjestikku lülitatud takistuste (põranda, jalanõude, maa) suurus. Maandatud neutraaliga võrk Suurem osa elektrikahjustustest tekib just sellisel lülitusel. Inimene satub faasipinge alla: Iin= Uf / Rin = Ul /(ruutjuur 3 x Rin)= 220/ 1000= 220 mA. Kui liita inimese takistusele juurde nulljuhtme maandustakistus R0, jalanõude takistus Rjalan, põranda takistus Rpõr, siis inimest läbiv vool väheneb Iin= Uf /(Rin+ Rjalan + Rpõr + R0) Vaatleme kõige halvemat juhtu - kui inimene seisab voolu juhtival põrandal voolu juhtivate (märgade) jalanõudega. Rjalan= 50 000 oomi (ei juhi elektrit) Rpõr= 60 000 oomi (puitpõrand) R0= 10 oomi, siis Iin= 220/ (1000+50 000+60 000+10)= 0,002 A =2 mA Tegelikkuses on Rjalan ja Rpõr tunduvalt suuremad.
Konflikti lahendamine Konflikti lahendamine toimub läbi viie-astmelise protsessi: o Probleemi identifitseerimine et selgitada välja peamised põhjused selle tekkimiseks. * Juhid peavad välja selgitama arvamused, eeldused, oodatavad tulemused, üksikisikute vajadused ja pakutavad lahendusvariandid. o Probleemile tuleb läheneda kui takistusele, mis tuleb ületada või kui eesmärgile, mis tuleb saavutada. * Ei saa kohe asuda järelduste tegemisele, enne seda tuleb analüüsida probleemi ja aru saada, miks selline situatsioon tekkis. * Kõik sellesse haaratud osapooled peavad aru saama takistustest, mis aitavad lahendada seda probleemi ning mis tuleb saavutada, et need takistused ületataks. o Kontsentreeruda ei tule mitte inimestele või grupile, vaid kogu tähelepanu tuleb
Termo-emj mõõtmise iseärasused millivoltmeetri kasutamisel. Magnetelektrilisi millivoltmeetreid kasutatakse termomeetrias termo-emj mõõtmiseks. Põhimõtteskeem: 1 kerge liikuv raam 2 poolteljed 3 osuti 4 spiraalvedrud 5 püsimagnet 6 - liikumatu terassilinder 6 Millivoltmeetri kasutamisel termo-emj mõõtmiseks on lisaks näitu mõjutavale vooluringi takistusele probleemiks täpsus vähendavad soojuskiirgus, laeng välispinnal ja ümbruses asuvad magnetväljad. 13. Termoelektromotoorjõu mõõtmine kompensatsioonmeetodil. Potentsiomeetri tööpõhimõte. Automaatpotentsiomeetrid. Termoelektromotoorjõu mõõtmisel kompensatsioonimeetodil mõõdetava elektromotoorjõu kompenseerib vastassuunalise pingelanguga gradueeritud takisti, kusjuures takisti vooluringi toidetakse iseseisvast madalpingelisest alalisvooluallikast
rakendada tööorganile vastavad jõud, mille tagajärjel tekivad pinnases vastavad reaktsioonijõud e takistusjõud, mida nim analoogselt: P01 – lõiketakistus ja P02- süvistustakisuts ja nende resultant Po – summaarne lõikamise takistus. Vahetut laastu eraldamise protsessi nim lõikamiseks. Lahtilõigatud laastu liikumist tööorganil või tööorgani sees ning tema ees koos lõikamisega nim kaevamiseks, mille käigus toimivad tööorganile lisaks lõikamise takistusele veel mitmed teised takistused ja mida on hakatud nim summaarseks kaevamistakistuseks. Lõikamisel tekkivate takistuste väärtus sõltub suuresti lõiketera geomeetrilistest parameetritest, milleks on a) lõiketera taganurk α, mida mõõdetakse tagatahu ja lõikeserva liikumistrajektoori puutuja vahel b) lõiketera teritusnurk, mis on lõiketera esi- ja tagatahu vaheline nurk c) lõiketera esinurk γ, mida mõõdetakse lõiketera esitahu ja
Termo-emj mõõtmise iseärasused millivoltmeetri kasutamisel. Magnetelektrilisi millivoltmeetreid kasutatakse termomeetrias termo-emj mõõtmiseks. Põhimõtteskeem: 1 kerge liikuv raam 2 poolteljed 3 osuti 4 spiraalvedrud 5 püsimagnet 6 - liikumatu terassilinder 6 Millivoltmeetri kasutamisel termo-emj mõõtmiseks on lisaks näitu mõjutavale vooluringi takistusele probleemiks täpsus vähendavad soojuskiirgus, laeng välispinnal ja ümbruses asuvad magnetväljad. 13. Termoelektromotoorjõu mõõtmine kompensatsioonmeetodil. Potentsiomeetri tööpõhimõte. Automaatpotentsiomeetrid. Termoelektromotoorjõu mõõtmisel kompensatsioonimeetodil mõõdetava elektromotoorjõu kompenseerib vastassuunalise pingelanguga gradueeritud takisti, kusjuures takisti vooluringi toidetakse iseseisvast madalpingelisest alalisvooluallikast
Ta on siiski liiga väike ja tema sisemuses ei ole piisavalt energiat tuumareaktsioonide süütamiseks. "Jupiteril on ähmaseid rõngaid nagu Saturnil, kuid palju väiksemad. Need on pildistatud infrapunases kiirguses maapealsetest teleskoopidest. Erinevalt Saturnist, on Jupiteri rõngad tumedad (albeedo umbes .05). Arvatavasti koosnevad nad väga väikestest kivise materjali teradest. Osakesed Jupiteri rõngastes ei püsi seal kaua (vastavalt atmosfäärilisele ja magnetilisele takistusele). Seetõttu, kui rõngastel on jäävad tunnused, peavad nad saama pidevalt uut gaasilist ainet. Väikesed kaaslased Metis ja Adrastea, mis tiirlevad rõngaste sees, on ilmsed gaasilise aine allikate kanditaadid. 1994 aastal põrkas Comet Shoemaker-Levy 9 kokku Jupiteriga (vasakul). Kokkupõrke tulemused olid selgelt nähtavad isegi amatöörteleskoopidega. Kokkupõrke rusud olid nähtavad ligikaudu aasta hiljem HST'ga.
See on ühikuta suhtarv, mis näitab, mitu korda suureneb vootihedus vaadeldavas keskkonnas võrreldes vootihedusega vaakumis. 3.Mittesümmeetria kolme faasilises süsteemis Mittesümmeetria erijuhiks on katkestus ühes faasis. See esineb näiteks ühe kaitsme läbipõlemisel. Kui neutraaljuht on terve, jääb katkestatud faas toiteta. Teises faasides jätkub töö normaalselt ÜLESANNE: Q=3000C t=10min e 600s I=Q/t 3000/600 = 5 A 5.1 Takistus; aineeritakistus; temperatuuri mõju takistusele Takistus- on juhi omadus avaldada vastupanu elektrivoolule, mida mõõdetakse pinge ja voolu suhtega R=U/I , Ühik on . Voolutugevus sõltub peale pinge veel juhi omadusele, mida nim. elektritakistuseks. Juhtme takistus on võrdeline tema pikkusega, pöördvõrdeline ristlõike pindalaga, ning sõltub lisaks materjalist ja temperatuurist. R=Q * l/S l- juhtme pikkus; S- ristlõikepindala; Q- aine eritakistus
· Takisti kõrgeim temperatuur Tmax mille juures takisti võib veel püsivalt töötada. · Takisti temperatuuri tegur max näitab takistuse suhtelist muutust 1°C kohta t1 t2 Suhteline muutumine R1 100 105 0,05 R2 1000 1010 0,01 · Takisti omamüra tase Em - iseloomustab suhteline müra elektromotoorne jõud, mis on takistuses tekkiva müra suurus mikrovoltides. Takistusele takendatud alalispine ühe voldi kohta · Takistite kasutamisjuhised · Takistite tähistused MT 0,25 10 K ± 5% MT- materjali koostis 0,25 võimsust 10 K - oomilisttakistust % - protsente Protsentide tähtsus tähtedega B C D F G J K M 0,1 0,2 0,5 1 2 5 10 20 5 Takistite värvijoon näitab oomilist suurust ja protsendilist eksimust
Auto liikumisel ratastelt kerele kanduvate tõügete pehmendamiseks kasutatakse autodel tavaliselt keerdvedrusi. Erinevatel automarkidel on tavaliselt erineva pikkusega ja jäikusega keerdvedrud. Vedrud kinnitatakse erinevatele autodele erineval, aga tavaliselt kere ja silla kõljes asuvate lääpade vahele 9.2 Amordisaatorid: Auto õõtsumine mis tekib vedrude deformeerumisel, jätkub teatud aeg pärast ratta takistusele veeremisele saadud tõukest. Et sellist õõtsumist kiiresti summutada, Kasutatakse auodel Hõdraulilisi, Pneumaatilisi ja Hõdro+ Pneumo amordisaatoreid. Amordi töötamine põhineb vedeliku lükkamisel peente avade ja kanalite kaudu amordisaatori kere õhest poolest teise, kusjuures vedeliku voolamise takistus kulutab ära õõtsumise energia. Enamasti kasutatakse autodel kahepoolse töötamisega teleskoopamordisaatoreid, mis summutavad
Kuu ööpäeva tegelik pikkus, peale ümber Maa tiirlemise pöörleb Kuu ümber oma telje. Et 12 sideeriline pöörlemisperiood võrdub sideerilise tiirlemisperioodiga, siis näeb maapealne vaatleja kogu aeg ainult üht Kuu poolkera (Kuu 1990: 244, 245). 5.4. Jupiteri kaaslased Jupiteril on 16 teadaolevat kaaslast, neli suuremat Galileo kuud ja 12 väiksemat. Jupiter aeglustab vähehaaval kiirust vastavalt loodete takistusele, mida tekitavad Galilei kuud. Samuti muudab sama loodete jõud kuude orbiite, väga aeglaselt sundides neid eemalduma Jupiterist. Io, Europa ja Ganymedes on lukustunud kokku loodete jõu poolt 1:2:4 orbitaalse resonantsiga ja nende orbiidid arenevad koos. Jupiteri kaaslased (Joonis 10.) on nimetatud teiste kujude järgi Zeusi elus (Jupiter.www). Joonis 9. Kuu faasid (Kuu faasid.www). Joonis10. Jupiteri kaaslased (Jupiteri kaaslased.www). 5.5. Taevased udulaigud
Kui tööraami küljelenihutussilinder puutub vastu piirdehooba, siis annab hoob liikumise edasi käigupiiramisklapile, mis kõrvaldab juhthüdrosüsteemis vastavatelt pilootjagajatelt rõhu. Selle tulemusena suletakse põhijagajas õli läbivool ja vastavate silindrite liikumised seiskuvad. Süsteem saadakse jälle toimima hõlma vasakpoolset otsa langetades. Kaitseklapid (2 tk.) asetsevad tööraamil, ülesanne on kaitsta tööraami konstruktsiooni takistusele sattumisel vigastumise eest. Normaaltingimustes peab klapp hakkama tööle 130 bar´i juures. 20. Teehöövli superujuvasendid, nende kasutamine. Kergujuvreziim töötera rõhumisjõudu teepinnale vähendatakse kunstlikult rõhuakust rõhu lisamisega hõlma tõstesilindri alapoolele. Ujuvreziim tõstesilinder on normaalses ujuvreziimis. Kui hõlm asub transportasendis, siis saab teda selliselt kiiresti langetada
Ta on siiski liiga väike ja tema sisemuses ei ole piisavalt energiat tuumareaktsioonide süütamiseks. "Jupiteril on ähmaseid rõngaid nagu Saturnil, kuid palju väiksemad. Need on pildistatud infrapunases kiirguses maapealsetest teleskoopidest. Erinevalt Saturnist, on Jupiteri rõngad tumedad (albeedo umbes .05). Arvatavasti koosnevad nad väga väikestest kivise materjali teradest. Osakesed Jupiteri rõngastes ei püsi seal kaua (vastavalt atmosfäärilisele ja magnetilisele takistusele). Seetõttu, kui rõngastel on jäävad tunnused, peavad nad saama pidevalt uut gaasilist ainet. Väikesed kaaslased Metis ja Adrastea, mis tiirlevad rõngaste sees, on ilmsed gaasilise aine allikate kanditaadid. 1994 aastal põrkas Comet Shoemaker-Levy 9 kokku Jupiteriga (vasakul). Kokkupõrke tulemused olid selgelt nähtavad isegi amatöörteleskoopidega. Kokkupõrke rusud olid nähtavad ligikaudu aasta hiljem HST'ga.
suhtes kehade liikumist uuritakse. Newton kirjutab: ,,Inertsijõudu avaldab keha ainult siis, kui temale rakendatud teine jõud tekitab muutuse tema liikumisolekus. Selle inertsijõu avaldust võib vaadelda kahesuguselt: nii omaenese vastupanuna kui ka survena; omaenese vastupanuna niivõrd, kuivõrd keha paneb vastu temale mõjuvale jõule, püüdes säilitada oma liikumisolekut; survena niivõrd, kuivõrd seesama keha, jäädes vaevaga alla temale vastupanevale takistusele, püüab muuta selle takistuse olekut." Kui keha hakkab mingite põhjuste tõttu kiiremini või aeglasemalt liikuma, siis avaldab see keha inertsjõudu, kuid see inertsjõud on rakendatud teistele kehadele, nimelt nendele, mis muudavad esimese keha liikumisolekut. Füüsika kaasaegsel arenemisastmel ei tea me ühtki mateeria avaldust, mis oleks ilma inertsita. (Putilov 1962: 36-38) Ehk siis Newtoni I seadus kõlab järgmiselt:
stabiilsus. Kui on koostatud skeem vastavalt joonisele ning see juhendaja poolt kontrollitud, võite asuda tühijooksu karakteristiku ülesvõtmisele. Järgnevalt on kirjeldatud karakteristiku ülesvõtmist teise mooduse järgi. Selleks jätke tarviti RT generaatoriga ühendamata, esialgu 13 ka ergutusvool sisselülitamata, aga ergusvoolu reguleeriv reostaat Re seadke maksimaalsele takistusele. Pange generaator pöörlema, mõõtke ära generaatori klemmidel tekkinud emj. Seejärel lülitage sisse ergutusvool, suurendage ettevaatlikult ja sujuvalt ergutusvoolu. Ergutusvoolu suurendamisel peab genereeritav emj kasvama, see on tunnuseks, et ergutusväli on samasuunaline jääkväljaga. Suurendage ergutusvoolu sammuga umbes 0,2 A, kuni emj kasvab väärtuseni e = (1,5 ¸ 1,75) U nom . Selliselt saame tühijooksukõvera kasvava haru.
12. Rõhuakude seisukorra kontroll' Vastused: 1. tööseadmete ja lisaseadmete juhtimine 2. seisupidur, diferentsiaali lukk, juhtimine, pidurikontuur 3. kaitseb tööraami küljenihutussilindrit ja hõlma vasakpoolset tõstesilindrit vigastuste eest 4. kui tööraami küljenihutussilinder puutub vastu piirdehooba, annab hoob liikumise edasi käigupiiramisklapile, mis kõrvaldab juhthüdrosüsteemis vastavatelt jagajatelt rõhu 5. kaitsta tööraami konstruktsiooni takistusele sattumisel vigastumise eest. 6. Tõstesilindrite küljes juhtplokid, hüdroakud, juhtpuldid 7. Töötera rõhumisjõudu teepinnale vähendatakse kunstlikult rõhuakust rõhu lisamisega hõlma tõstesilindri alapoolele 8. Töötera rõhumisjõudu teepinnale vähendatakse kunstlikult rõhuakust rõhu lisamisega hõlma tõstesilindri ülapoolele 9. rõhufiltri ja tagasivoolufiltri vahetus 10
6.Sõltuvus kuubilise raku külje ja aatomraadiuse vahel RTK elementaarrakus? Sõltuvus avaldub kujul: a sqrt(3)=4r kus r aatomraadius ja a-ühikraku külje pikkus. 7.Kuidas sõltub tasakaalsete vakantside kontsentratsioon temperatuurist? Tasakaaluliste vakantside konsentratsioon suureneb aine temperatuuri vähenedes. 8.Kirjeldage difusiooni vakantsmehhanismi? Vakantsmehhanismi puhul difundeeruv aatom vahetab oma koha vakantsiga selles kehas(?) 9.Millest sõltub metalli elektritakistus? Takistusele avalduvad mõju elektronide hajumise mehhanismid (lisanddefektid, foononid ja deformatsioon) ja muidugi ka vabade elektronide arv. 10.Millised optilised nähtused esinevad mittemteallides? Mittemetallilised materjalid võivad valgust peegeldada, valgust neelata, kuid võib esineda ka valguse murdumist ja läbimist. 11.Mis on solidusjoon? 12.Analüüsige binaarset eutektikaga olekudiagrammi 17 1.Milles seisneb pooljuhtmaterjalide omapära?
Käivitus sama, mis sünkroonmootoritel. SK-del pole võlli väljaulatuvad osa, mis võimaldab teha nende kere hermeetiliseks. See on oluline nende jahutamisel (vesinikuga). Reaktiivne sünkroonmootor-rootoril ei ole ergutusmähist. Kuna sünkmootori moment M=Mpõhi+Mreaktiivne ja Mpõhi=(m1*U1*Eo/1*x*d)sin fii ning jättes mootori ergutusega ehk Eo=0 siis põhi momenti ei ole ja järgi jääb ainult reaktiivne pool.Rootor püüab võtta asendi mis vastaks magnetvälja minimaalsele takistusele. Reaktiivmootorite puudus on väiksem võimsus kui sama suurel ergutusmähisega sünkmootoril,heaks on aga et on mugav ja kaalub vähem, konstruktsioonilt lihtsam ja käivitamine on lihtne kuna ei ole vaja alalispinget. Sammmootor: Kas. elektriliste signaalide muundamiseks mootori liikuva osa diskreetseks liikumiseks.Eristatakse kaks liiki:1.Aktiivrootoriga-ergutatud rootoriga,rootori magnetsüdamikule on paigutatud ergutusmähis või püsimagnetid.2.Reaktiivrootoriga-rootor
Sõltuvus kuubilise raku kuljeja aatomraadiuse vahel RTK elementaarrakus? Sõltuvus avaldub kujul: a ruutjuur3=4R kus R- aatomi raadius ja a- ühikraku külje pikkus. 7. Kuidas sõltub tasakaalsete vakantside kontsentratsioon temperatuurist? Tasakaaluliste vakantside konsentratsioon suureneb aine temperatuuri vähenedes. 8. Kirjeldage difusiooni vakantsmehhanismi? Vakantsmehhanismi puhul difundeeruv aatom vahetab oma koha vakatnsiga selles kehas. (?) 9. Millest sõltub metalli elektritakistus? Takistusele avalduvad mõju elektronide hajumise mehhanismid (lisanddefektid, foononid ja deformatsioon) ja muidugi ka vabade elektronide arv. 10: Millised optilised nähtused esinevad mittemetallides? Mittemetallilised materjalid vöivad valgust peegeldada, valgust neelata, kuid võib esineda ka valguse murdumist ja läbimist. 11.Mis on solidusjoon. Alla poole solidusjoont (soliduse e. kristallumise)on ained tahkes faasis ehk tahkes olekus, tahked lahused. 12
guga. Kui magnetväljas olev pool sealt kiiresti eemaldada, siis tekib poolis elektromagnetilise induktsiooni tõttu elektromotoorjõud E. dΦ E =− dt Tekkinud elektromotoorjõud võrdub pooli takistuse ja voolutugevuse korrutisega (kui on teada galvanomeetri takistus, siis tuleks pooli takistusele liita ka galvanomeetri takistus). dΦ E = IR = − dt RIdt = −dΦ Voolutugevuse integraal üle aja on elektrilaeng Q. Integraal üle dΦ on magnetvoog Φ. QR = −Φ Magnetvoog Φ võrdub pooli ristlõikepindala S ja magnetinduktsiooni B korrutisega.
osadeks. Tavaliselt kasutatakse trummelsõelu. Sõeluda saab vaid kuiva materjali. Setitamine: uputamis- ja hõljutamissorteerimine põhineb sorteeritava materjali tiheduse erinevusel setitamisseadmes oleva vedeliku tihedusest kergem materjal tõuseb pinnale ja raskem vajub põhja, kusjuures raskema fraktsiooni täiendavaks sorteerimiseks võib kasutada sõela. Ballistiline sorteerimine: tahke materjal paisatakse rootoriga õhku. Raskemad tükid alluvad kõige vähem vastupuhuva õhuvoo takistusele ja lendavad kõige kaugemal asuvasse konteinerisse, kergemad aga puhutakse lähemal asuvasse konteinerisse (joonis) Joonis: Ballistiline sorteerimine. Magnetiline sorteerimine: magnetseparaatoriga jaotatakse tahke materjal vastavalt materjali magnetilistele omadustele. Optilisel eraldamisel transporditakse materjal transportooriga üle valgustatud ala. Vastavalt materjali optilistele omadustele (värv, läbipaistvus, eredus, nähtavus) tunneb optiline "silm"
30 F G D E 20 B C 10 A 0 10 20 30 I, A Joonis 6.4. Käivitustakistite graafilise leidmise diagramm Lõik HG vastab ankrumähise takistusele. Selle põhjal leiame takistuse mastaabi Ra 1,78 mR = , mR = 0,1 /mm HG 18 R1 = m R AC , R1 = 0,1 38 = 3,8 , R2 = m R CE , R2 = 0,1 22 = 2,2 , R3 = m R EG , R3 = 0,1 13 = 1,3 . Kogu reostaadi takistus Rk = 3,8 + 2,2 + 1,3 = 7,3 6.2